2012 KOP Workshop
28
2012 KOP Workshop 2012 KOP Workshop January 14, 2012 Hauppauge High School SPBLI – LI FIRST Mark McLeod Mark McLeod team358.org team358.org Northrop Grumman Corp. Northrop Grumman Corp. [email protected] [email protected]
-
Upload
anthony-stark -
Category
Documents
-
view
39 -
download
3
description
2012 KOP Workshop. January 14, 2012 Hauppauge High School SPBLI – LI FIRST. Mark McLeod team358.org Northrop Grumman Corp. [email protected]. Before We Start. Anyone with these issues please speak up before we get started: Classmate Restore Stick Issues Software Installation Issues - PowerPoint PPT Presentation
Transcript of 2012 KOP Workshop

2012 KOP Workshop 2012 KOP Workshop
January 14, 2012Hauppauge High School
SPBLI – LI FIRST
Mark McLeodMark McLeodteam358.orgteam358.org
Northrop Grumman Corp.Northrop Grumman [email protected]@ngc.com

Before We StartBefore We Start
Anyone with these issues please speak up Anyone with these issues please speak up before we get started:before we get started:
– Classmate Restore Stick IssuesClassmate Restore Stick Issues
– Software Installation IssuesSoftware Installation Issues
– Anything else that we can set the computers Anything else that we can set the computers to now and let them do their thing during the to now and let them do their thing during the KOP discussionKOP discussion
AgendaAgenda
KOPKOP 1st Week Issues 1st Week Issues New in 2012New in 2012 New ComponentsNew Components Changes from 2012Changes from 2012 Software InstallationSoftware Installation DocumentsDocuments
Presentation (and the links it contains) is located at:http://www.team358.org/files/workshops/

KOPKOP
Rookie vs. Vet KitsRookie vs. Vet Kits KOP consists of:KOP consists of:
– Physical KOP bins/boxesPhysical KOP bins/boxes– Vouchers from:
Automotive Recyclers (voucher in KOP) Banebots (code in TIMS) Digikey (voucher in KOP) Inventables (voucher in KOP) Bimba (http://www.bimba.com/en/FIRST-Form/)
– FIRSTFIRST Choice - Choice - http://www.andymark.com/login.asp

11stst Week Issues Week Issues
Bad Ribbon CableBad Ribbon Cable– Test by plugging into itselfTest by plugging into itself
Simple loop = goodSimple loop = good Mobius loop = badMobius loop = bad
http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/DB37%20Ribbon%20Cable%20Assembly%20-%20Rework%20Instructions.pdf
Camera Setup Utility Camera Setup Utility – Doesn’t work properly with old Axis 206 modelDoesn’t work properly with old Axis 206 model– Create FRC/FRC admin acct., set IP 10.xx.yy.11Create FRC/FRC admin acct., set IP 10.xx.yy.11
Trouble Imaging cRIOTrouble Imaging cRIO Jaguar Firmware 101 (CAN-only)Jaguar Firmware 101 (CAN-only)
http://www.ti.com/jaguar
11stst Week Issues Week Issues
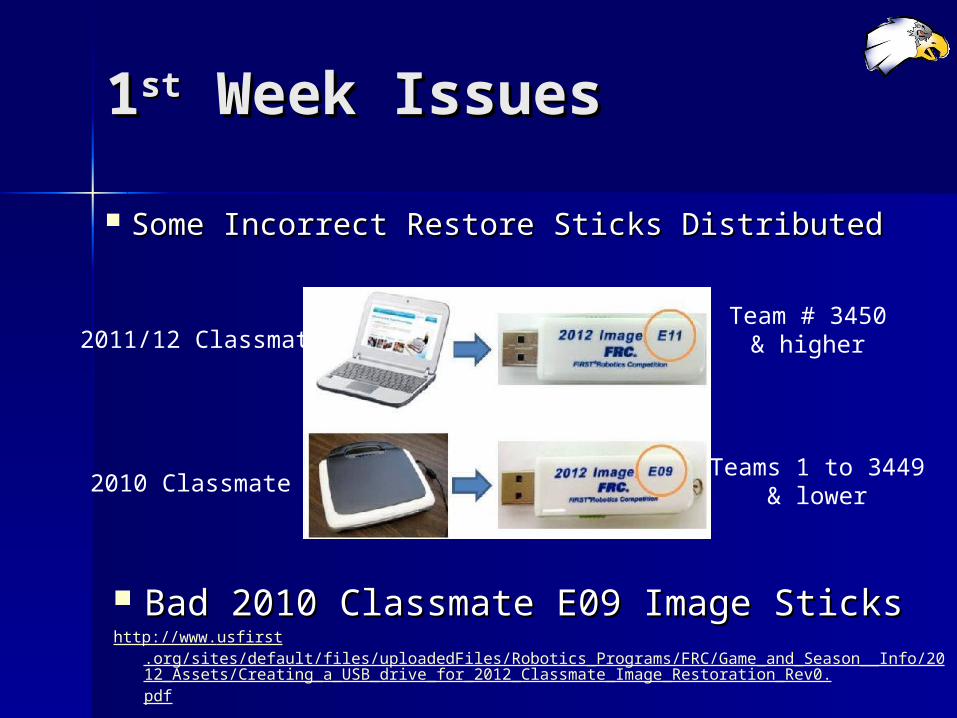
Bad 2010 Classmate E09 Image SticksBad 2010 Classmate E09 Image Stickshttp://www.usfirst
.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and_Season__Info/2012_Assets/Creating_a_USB_drive_for_2012_Classmate_Image_Restoration_Rev0.pdf
Some Incorrect Restore Sticks DistributedSome Incorrect Restore Sticks Distributed
Team # 3450& higher
Teams 1 to 3449& lower
2011/12 Classmate
2010 Classmate
11stst Week Issues Week Issues
Software Installation IssuesSoftware Installation Issues– Lots of pieces this yearLots of pieces this year– Wind River installer issue - Update Wind River installer issue - Update
v2993v2993http://firstforge.wpi.edu/sf/frs/do/listReleases/projects.wpilib/frs
.2012_update_for_c
– Java Plugins - delete sunspotsdk folder & reinstall, upgrade to latest JavaBeans
New in 2012New in 2012
cRIO FRC IIcRIO FRC II Motors – lots moreMotors – lots more Electric Solenoid – push Electric Solenoid – push oror pull devices, no pull devices, no
greater than 1 in. stroke and no greater than 10 greater than 1 in. stroke and no greater than 10 watts continuous duty at 12vwatts continuous duty at 12v
Catalyst Simulator - PC/web based - play the 2012 Catalyst Simulator - PC/web based - play the 2012 gamegame– http://dbsgames.net/games_temp.php?p=1

New ComponentsNew Components
cRIOcRIO– Old modules in Old cRIOs must be Old modules in Old cRIOs must be
relocated!relocated!– FRC IIFRC II
4.4” shorter4.4” shorter .63 lbs lighter.63 lbs lighter 2x memory & storage2x memory & storage
Kinect Kinect MaxBotix SonarMaxBotix Sonar SoftwareSoftware
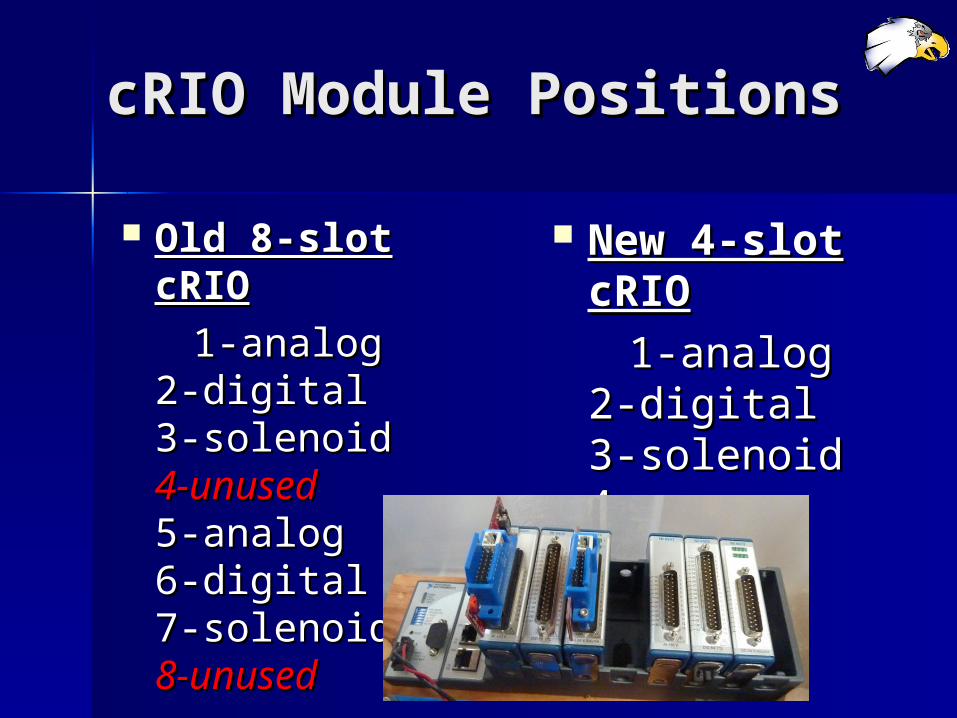
cRIO Module PositionscRIO Module Positions
Old 8-slot Old 8-slot cRIOcRIO
1-analog 1-analog 2-digital2-digital3-solenoid3-solenoid4-unused4-unused5-analog5-analog6-digital6-digital7-solenoid7-solenoid8-unused8-unused
New 4-slot New 4-slot cRIOcRIO
1-analog 1-analog 2-digital2-digital3-solenoid3-solenoid4-any4-any

cRIO FRC IIcRIO FRC II
CANoptional
CAN optional
Pit tethering
Both
FRC II
FRC I
Optional

CRIO FRC IICRIO FRC II
• The cRIO FRC II adds a protective conformal coating to the electronics helping to guard against metal dust and fragments that work their way into the case from shorting out the circuits.
• The original cRIO FRC had user installable gaskets that many teams never used or even knew what they were for.
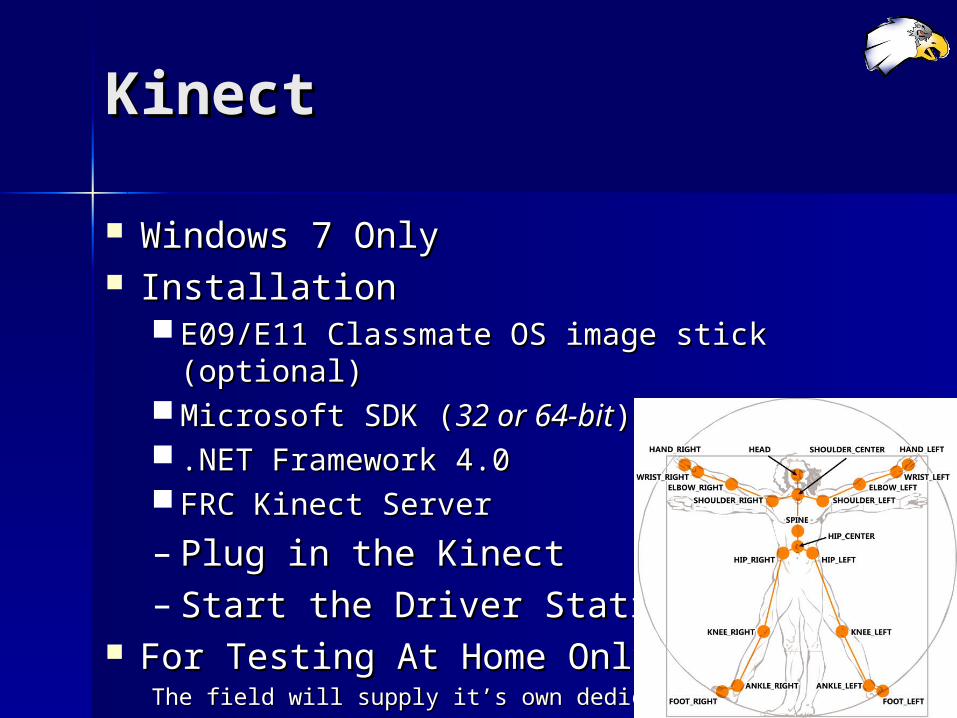
KinectKinect
Windows 7 OnlyWindows 7 Only InstallationInstallation
E09/E11 Classmate OS image stick (optional)E09/E11 Classmate OS image stick (optional) Microsoft SDK (Microsoft SDK (32 or 64-bit32 or 64-bit)) .NET Framework 4.0.NET Framework 4.0 FRC Kinect ServerFRC Kinect Server
– Plug in the KinectPlug in the Kinect– Start the Driver StationStart the Driver Station
For Testing At Home OnlyFor Testing At Home OnlyThe field will supply it’s own dedicated oneThe field will supply it’s own dedicated one
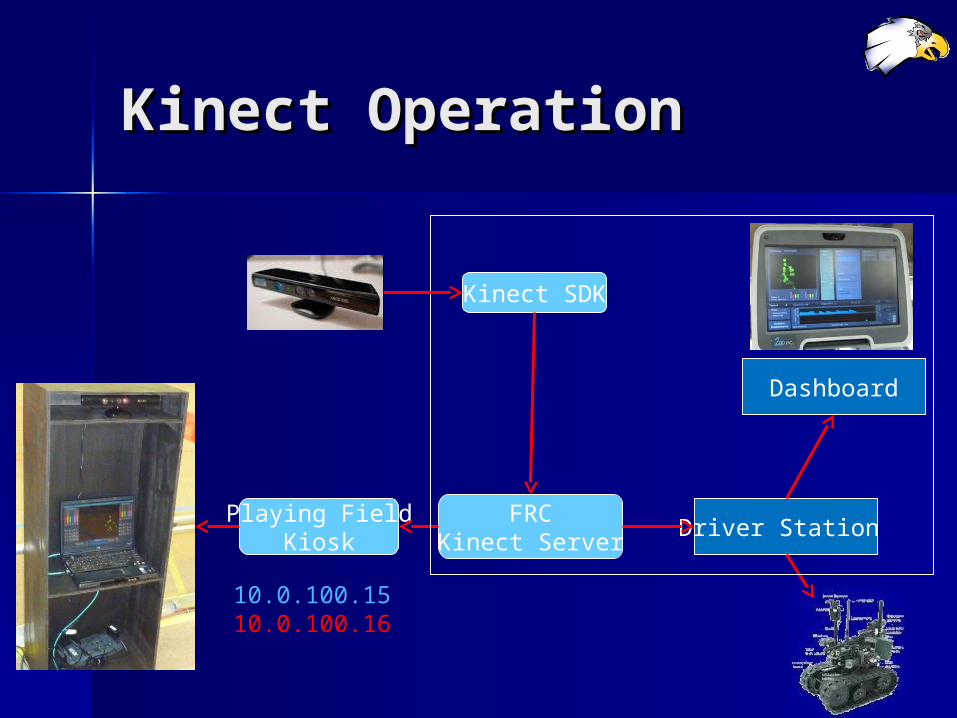
Kinect OperationKinect Operation
Kinect SDK
FRCKinect Server
Driver Station Playing Field
Kiosk
Dashboard
10.0.100.1510.0.100.16
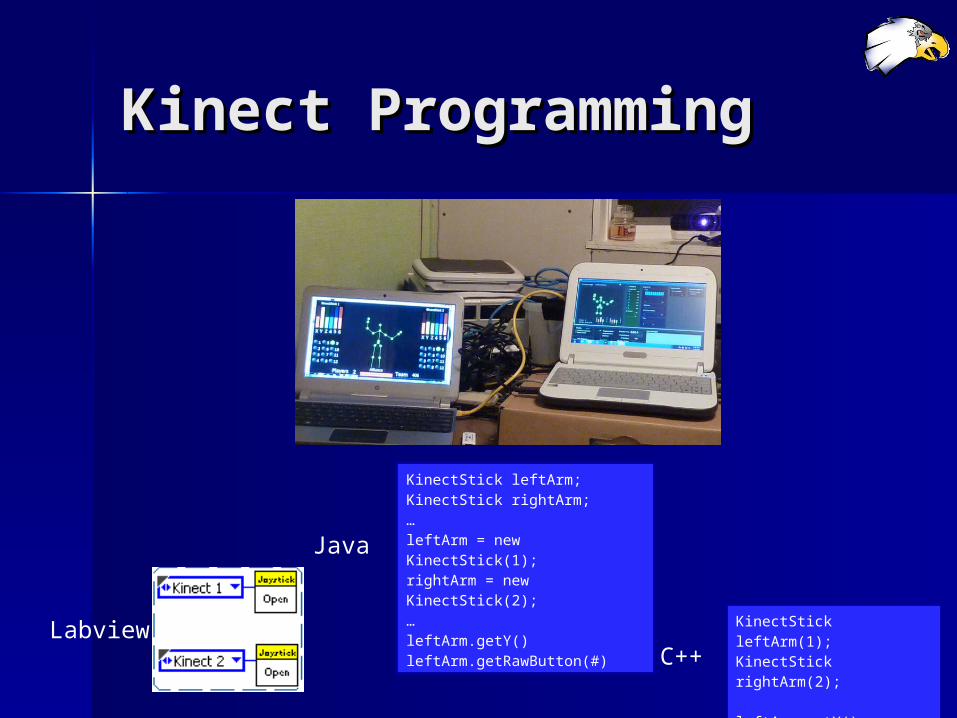
Kinect ProgrammingKinect Programming
Labview KinectStick leftArm(1);KinectStick rightArm(2);
leftArm.getY()leftArm.getRawButton(#)
C++
KinectStick leftArm;KinectStick rightArm;…leftArm = new KinectStick(1);rightArm = new KinectStick(2);…leftArm.getY()leftArm.getRawButton(#)
Java

KinectKinect
Good Skeletal RecognitionGood Skeletal Recognition Laggy Response - Laggy Response - Be Real Careful w/RobotBe Real Careful w/Robot Default Motions Map to 2-Joystick Buttons Default Motions Map to 2-Joystick Buttons
and Axesand Axes– Kinect Enable = Kinect Enable = both arms in plane & rangeboth arms in plane & range– Button 1/2 = head to the right/leftButton 1/2 = head to the right/left– Button 3/4 = right/left leg out to sideButton 3/4 = right/left leg out to side– Button 5/6 = right leg forward/backButton 5/6 = right leg forward/back– Button 7/8 = left leg forward/backButton 7/8 = left leg forward/back– Axis y = arm up/down (left arm = Kinect 1, right arm = Kinect Axis y = arm up/down (left arm = Kinect 1, right arm = Kinect
2) 2) wrist-to-shoulder anglewrist-to-shoulder angle
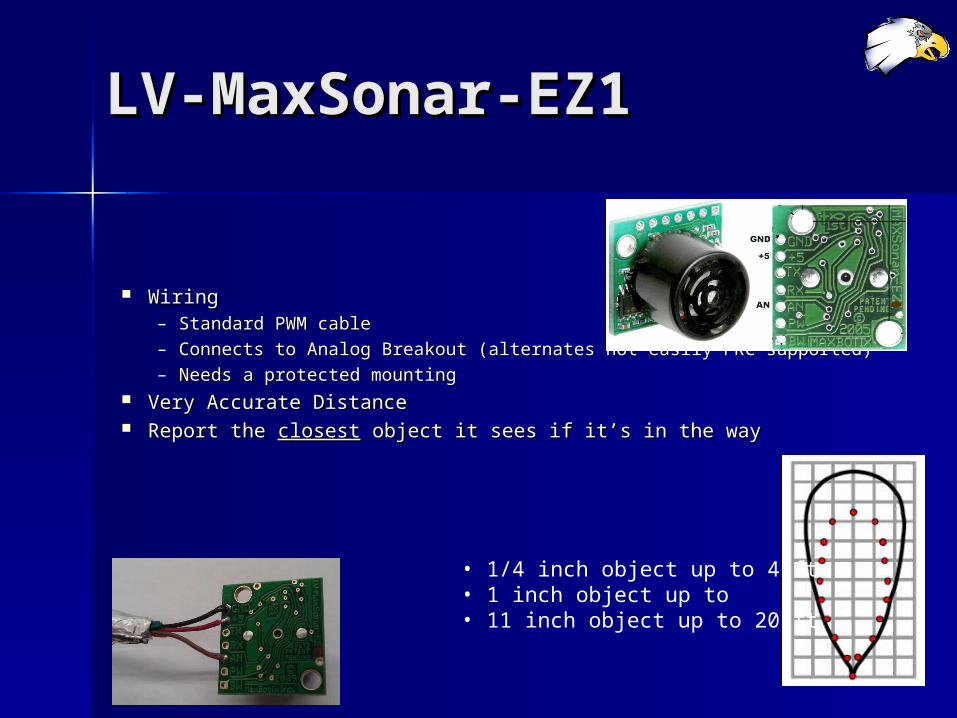
LV-MaxSonar-EZ1LV-MaxSonar-EZ1
WiringWiring– Standard PWM cableStandard PWM cable– Connects to Analog Breakout (alternates not easily FRC supported)Connects to Analog Breakout (alternates not easily FRC supported)– Needs a protected mountingNeeds a protected mounting
Very Accurate Distance Very Accurate Distance Report the Report the closestclosest object it sees if it’s in the way object it sees if it’s in the way
• 1/4 inch object up to 4 ft• 1 inch object up to • 11 inch object up to 20 ft

Changes from 2011Changes from 2011
Driver StationDriver Station DashboardDashboard
– Default Has Kinect SkeletonDefault Has Kinect Skeleton MotorsMotors ProgrammingProgramming
– cRIO Imaging Tool - cRIO cRIO Imaging Tool - cRIO diagram, hover mouse over any slot in red or empty and it will tell you the problem or what can go in there
– Battery voltage readily availableBattery voltage readily available– Kinect data inputKinect data input– LV Compressor & Camera changesLV Compressor & Camera changes
Camera DefaultCamera Default (10.xx.yy.11)(10.xx.yy.11)– Use Camera setup toolUse Camera setup tool– Camera default connection is to the robot bridgeCamera default connection is to the robot bridge– Serve images to both the Driver Station and the cRIO at the Serve images to both the Driver Station and the cRIO at the
same time same time – Displays on the default Dashboard and is available to the cRIODisplays on the default Dashboard and is available to the cRIO
Driver StationDriver Station
No Separate Estop ButtonNo Separate Estop Button ““Driver” User Account Not RequiredDriver” User Account Not Required Any Win7/XP Laptop Any Win7/XP Laptop (Windows 7 Required for Kinect)(Windows 7 Required for Kinect)
Competition power still for Classmates ONLY Competition power still for Classmates ONLY (19v, (19v, 2a barrel connector)2a barrel connector)
Data LogsData Logs– battery, packet loss, cpu usage etc. every 20ms. – Files stored: C://Users/public/Documents/FRC/Log Files– Viewer: C://Program Files (x86)/FRC Driver Station/Driver Station Log File Viewer
Spacebar = E-Stop, Enter=Disable, F1=EnableSpacebar = E-Stop, Enter=Disable, F1=Enable Minimum Software InstallationMinimum Software Installation

Driver StationDriver Station
DS Tutorial: https://decibel.ni.com/content/docs/DOC-14705
BatteryCPU %Lost packetsPacket delay
Kinect Status0, 1, or 2 people
KinectVersions
MotorsMotors
Up to 22 Motors Allowed <R48> Up to 22 Motors Allowed <R48> up to 4 CIM motors (part #FR801-001, M4-R0062-12, AM802-001A, 217-200 up to 4 CIM motors (part #FR801-001, M4-R0062-12, AM802-001A, 217-200
or PMR25R-45F-1003)or PMR25R-45F-1003) up to 4, in any combination, of the BaneBots motors provided in the KOP up to 4, in any combination, of the BaneBots motors provided in the KOP
(acceptable part numbers are(acceptable part numbers areM7-RS775-12, M7-RS775-18, M5-RS550-12, M5-RS550-12-B, and M3-RS395-M7-RS775-12, M7-RS775-18, M5-RS550-12, M5-RS550-12-B, and M3-RS395-12)12)
up to 2 window motors (acceptable part #s are 262100-3030 and 262100-up to 2 window motors (acceptable part #s are 262100-3030 and 262100-3040)3040)
up to 2 FisherPrice motors (acceptable part #s are 00968-9013, 00801-0673, up to 2 FisherPrice motors (acceptable part #s are 00968-9013, 00801-0673, and 00968-9015)and 00968-9015)
up to 2 AndyMark motors (acceptable part # is am-0912)up to 2 AndyMark motors (acceptable part # is am-0912) up to 2 AndyMark gearmotors (acceptable part # is am-0914)up to 2 AndyMark gearmotors (acceptable part # is am-0914) up to 2 Denso throttle control motors (acceptable part # AE2351000)up to 2 Denso throttle control motors (acceptable part # AE2351000) up to 2 VEX motors (acceptable part # 276-2177)up to 2 VEX motors (acceptable part # 276-2177) up to 2 window lift, seat, windshield wiper or door motors obtained through up to 2 window lift, seat, windshield wiper or door motors obtained through
either the FIRST-Automotive Recyclers Association partnership or from a prior either the FIRST-Automotive Recyclers Association partnership or from a prior years’ KOP.years’ KOP.

Programming ChangesProgramming Changes
All Use Module # Instead of Slot #All Use Module # Instead of Slot # Modules Must Be in Different Slots Than Last YearModules Must Be in Different Slots Than Last Year
LabVIEW 2011LabVIEW 2011– Compressor & CameraCompressor & Camera– Vision Palette AdditionsVision Palette Additions– Gyro Calibration ConfigurationGyro Calibration Configuration
C++/JavaC++/Java– Command ClassCommand Class– Network TablesNetwork Tables– Smart DashboardSmart Dashboard– Vision code (NI c code or OpenCV)Vision code (NI c code or OpenCV)

Interesting Interesting WhitepapersWhitepapers
http://decibel.ni.com/content/community/first/frc?http://decibel.ni.com/content/community/first/frc?view=documentsview=documents
E.g.,E.g., Vision Target TutorialVision Target Tutorial Driver StationDriver Station Robot Framework TutorialRobot Framework Tutorial Basic Kinect TutorialBasic Kinect Tutorial

Software InstallationSoftware Installation
Read the DirectionsRead the Directions– Backup old projectsBackup old projects– Remove Old ApplicationsRemove Old Applications– Basic Install - in the following order:Basic Install - in the following order:
LabVIEW or LabVIEW Tools (from the KOP stick)LabVIEW or LabVIEW Tools (from the KOP stick) LabVIEW FRC Update (only if using LabVIEW) (online)LabVIEW FRC Update (only if using LabVIEW) (online) Utilities Update (online)Utilities Update (online) Driver Station Update (online)Driver Station Update (online)
– KinectKinect Microsoft SDK (online)Microsoft SDK (online) .Net Framework 4.0 (online).Net Framework 4.0 (online) FRC Kinect Server (online)FRC Kinect Server (online)
– Windriver DVD Windriver DVD - 2- 2ndnd DVD for 64-bit PCs (from the KOP DVD) DVD for 64-bit PCs (from the KOP DVD) C++ Update (online)C++ Update (online)
– Java (online)Java (online) NetBeans NetBeans http://www.netbeans.org Java Update Java Update http://firstforge.wpi.edu/sf/projects/wpilib & go to documents & go to documents
Watch For Future Watch For Future Software UpdatesSoftware Updates
2012 Robot Control System Information2012 Robot Control System Informationhttp://www.usfirst.org/roboticsprograms/frc/2012-kit-of-parts-control-system
Current Updates:Current Updates: LabVIEW FRC UpdateLabVIEW FRC Update
http://joule.ni.com/nidu/cds/view/p/id/2261
Utilities UpdateUtilities Updatehttp://joule.ni.com/nidu/cds/view/p/id/2262
Driver Station UpdateDriver Station Updatehttp://joule.ni.com/nidu/cds/view/p/id/2263
C++ UpdateC++ Updatehttp://firstforge.wpi.edu/sf/frs/do/listReleases/projects.wpilib/frs.2012_update_for_c
Java UpdateJava Updatehttp://firstforge.wpi.edu/sf/frs/do/listReleases/projects.wpilib/frs
.2012_java_update_for_frc
Other Software Other Software UpdatesUpdates FIRSTFIRST
– Kinect ServerKinect Serverhttp://firstforge.wpi.edu/sf/frs/do/listReleases/projects.wpilib/frs.2012_frc_kinect_server
– Kinect KioskKinect Kioskhttp://firstforge.wpi.edu/sf/frs/do/listReleases/projects.wpilib/frs.2012_frc_kinect_kiosk
Commercial SoftwareCommercial Software– Microsoft SDKMicrosoft SDK
http://kinectforwindows.org/
– .NET Framework 4.0 .NET Framework 4.0 (already installed on E09/E11 sticks)(already installed on E09/E11 sticks)http://www.microsoft.com/download/en/details.aspx?id=17851

Flood of DocumentsFlood of Documents
FIRSTFIRST KOP site KOP sitehttp://www.usfirst.org/roboticsprograms/frc/2012-frc-kit-of-partshttp://www.usfirst.org/roboticsprograms/frc/2012-frc-kit-of-parts
Getting Started with the 2012 FRC Control Getting Started with the 2012 FRC Control SystemSystemhttp://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/http://www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/
Game_and_Season__Info/2012_Assets/Getting%20Started%20with%20theGame_and_Season__Info/2012_Assets/Getting%20Started%20with%20the%202012%20FRC%20Control%20System_2.pdf%202012%20FRC%20Control%20System_2.pdf

LinksLinks
ChiefDelphi Community: – http://www.chiefdelphi.com
Game Manual: – http://www.usfirst.org/roboticsprograms/frc/competition-manual-and-related-
documents
FRC Software Updates: – http://www.usfirst.org/roboticsprograms/frc/2012-kit-of-parts-control-system
Technical Manuals on FRC KOP Website– http://www.usfirst.org/roboticsprograms/frc/2012-kit-of-parts-control-system
Black Jaguar RMA Procedure: – http://forums.usfirst.org/showthread.php?p=44255#post44255