179 narayan p
31
Performance Analysis of Wind - Fuel Cell Hybrid System linked with BESS-VF Controller Authored By Narayan P. Gupta, Sushma Gupta, Anil Kumar Presented By Narayan P. Gupta Department of Electrical Engineering Oriental Institute of Science & Technology, Bhopal, India
-
Upload
4th-international-conference-on-advances-in-energy-research-icaer-2013 -
Category
Technology
-
view
147 -
download
0
description
Transcript of 179 narayan p

Performance Analysis of Wind - Fuel Cell
Hybrid System linked with BESS-VF Controller
Authored ByNarayan P. Gupta, Sushma Gupta, Anil Kumar
Presented ByNarayan P. Gupta
Department of Electrical EngineeringOriental Institute of Science & Technology, Bhopal, India

Contents
2
Introduction
Wind Turbine Systems
Vector Control Scheme of GSC and RSC
Solid Oxide Fuel Cell Energy Conversion System
Modeling of D-STATCOM
Simulation Results
Conclusion
Appendix
References

3
Wind energy is most promising renewable energy source & its share is increasing w.r.t. to installed capacity, worldwide. India has fifth largest installed capacity in the world.Due to the intermittent characteristics of wind resources, it has been a challenge to
generate a highly reliable power with wind turbines.To overcome this limitation, a solid oxide fuel cell (SOFC) is used in conjunction with
wind generating plant.A multi-source hybrid power system increases energy availability significantly, it
becomes advantageous for practical applications that need highly reliable power regardless of location
The DFIG based variable speed wind turbine (type C) is the most popular in the growing wind market. This system uses two back-to-back PWM voltage source converters in the rotor circuit designed as grid side converter (GSC) and rotor side converter (RSC). The vector control strategy is used for both converters
Introduction

4
These high frequency switching converters of DFIG will inject additional harmonics in the system, which are increasing with wind speed variations.Load unbalancing, Poor power factor, Harmonics, Voltage drop at PCC, Reactive Power are some of important power quality issues related with nonlinear load. D-STATCOM is used to mitigate the voltage dip, compensate the reactive power, flicker, harmonic mitigations, load balancing and neutral current compensation.
Contd…

POWER QUALITY POWER QUALITY
FLICKER FLICKER SYSTEM TRANSIENTS
SYSTEM HARMONICS
NOISE
ELECTROMAGNATCINTERFERANCE
VOLTAGE SAG & SWELL
LOWPOWER FACTOR
Electric Power Quality basically refers to maintaining a near sinusoidal power distribution bus voltage at rated magnitude and frequency.
Variation in voltage, current or frequency is generally termed as PQ problems
Good power quality meansConstant voltage levelLow harmonic distortionLess transient eventsGood power factor
Power Quality

6
Consequences Unexpected power supply failures Equipment overheating and failure Electro magnetic interferences and noise in power system Increase of system losses oversize installations to cope with additional electrical stress Malfunction of protective relaying and voltage sensitive devices Mains voltage flickering
Sources Of HarmonicsSources Of Harmonics
Modern (Power-Electronic) Types
Modern (Power-Electronic) Types
TransformersTransformers Rotating MachinesRotating Machines
Arc Furnaces
Arc Furnaces
Controlled Devices
Controlled Devices SMPSSMPS Fluorescent
LampsFluorescent
Lamps
RectifiersRectifiers InvertersInverters Cyclo-converterCyclo-
converterHVDC
TransmissionHVDC
Transmission
Traditional (Classical) Types Traditional (Classical) Types
Contributors Reactive power Harmonic pollution Load imbalance Fast voltage variations
Contd…

7
15 KW DFIG
Wind TurbineSOFC
BESS DSTATCOM
Non Linear Load
PCC
Grid SideConverter
Rotor Side Converter
Transformer33KV/440V
Controller
CHOKE
DSTATCOM Controller
Transformer
Grid
Breaker
A
B
C
a
b
c
Discrete,Ts = 5e-006 s. Wind
Wind Speed m/s
A
B
C
a
b
c
A
B
C
a
b
c
g
A
B
C
+
-
g
A
B
C
+
-
g
A
B
C
+
-
A
B
C
+
-
[output]
A B C
A B C
Cdc
A
B
C
a
b
c
A_SOFC
B_SOFC
C_SOFC
Pulses
Pulse_RSC
Pulse_GSC
A_grid
B_grid
C_grid
Tm m
A
B
C
a
b
c
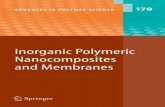
Simulink Test System
Fig. Simulink configuration of test system

8
Vector control Scheme of Grid Side Converter
Fig. – Schematic diagram of GSC
Grid Side Converter is used to maintain the dc-link voltage constant The voltage oriented vector control technique is used to control the GSC The PWM converter is current regulated with the direct axis current is used to regulate the DC link
voltage where as the quadrature axis current component is used to regulate the reactive power The reactive power demand is set to zero to ensure the unit power factor operation
The voltage balance across the line is given by
Using the abc-to-dq transformation, the corresponding equation in the dq-reference frame rotating at ωe is

9
Contd…
Fig. – Vector Control Scheme of GSC
The control scheme utilizes current control loops for id and iq The id demand being derived from the dc-link voltage error, through a standard PI controllerThe iq demand determines the reactive power flow between the grid and grid side converterThe iq demand is set to zero to ensure unit power factor operation.
Vd D- axis grid voltage
Vq Q- axis grid voltage
Vd1 D- axis grid side converter voltage
Vq1 Q- axis grid side converter voltage
id D- axis grid side converter current
iq Q- axis grid side converter current

10
Vector control Scheme of Rotor Side Converter The main purpose of the machine side converter is to maintain the rotor speed constant irrespective
of the wind speed Vector control strategy has been implemented to control the active power and reactive power flow of
the machine using the rotor current components The active power flow is controlled through idr
The reactive power flow is controlled through iqr
To ensure unit power factor operation like grid side converter the reactive power demand is also set
to zero (Qref = 0)
The currents iq and id can be controlled using Vq and Vd respectively
The control scheme utilizes cascade control The inner current control loops are used for controlling the d-axis and q-axis rotor currents The outer power control loops are used to control the active and reactive power on the stator

11
Contd…The d-q axis rotor voltage equation is given by,
Vdr* and Vqr* equation is given by,
Where V'dr and V'qr are found from the current errors processing through standard PI controllers The q-axis reference current i*qr is found from the reactive power errors The reference current i*dr can be found either from the reference torque or form the speed errors (for the
purpose of speed control) through standard PI controllers
Where Te*=(Pmech-Ploss)/ωr
Ploss = Mechanical Losses + Electrical Losses

12Fig. – Vector Control Scheme of RSC
Contd…

Fuel Cell Energy Conversion System Fuel cell converts chemical energy of a reaction into electricity with byproduct of water and
heat . Fuel cell consists of an electrolyte layer in contact with two electrodes on either side. Hydrogen
fuel is fed to anode and oxygen from air is fed to cathode. At anode Hydrogen is decomposed into positive and negative ions Only positive ions flow from anode to cathode . Recombination of positive and negative ions with oxidant takes place at cathode to form
depleted oxidant (or pure water).Anode Reaction: Cathode Reaction:
Overall Reaction:
The dc Voltage across FC stack is given by nernest’s equation
WhereVfc – Operating dc voltage (V),E0 – Standard reversible cell potential (V), pi – Partial pressure of species i (Pa), r – Internal resistance of stack (S), I – Stack current (A), N0 – Number of cells in stack, R – Universal gas constant (J/ mol K), T – Stack temperature (K), F – Faraday’s constant (C/mol) 13

14
Contd…Proton exchange membrane fuel Cell (PEMFC) Alkaline Fuel cell (AFC)Phosphoric acid fuel cell (PAFC)Molten Carbonate fuel cell (MCDC)Solid oxide fuel cell (SOFC)Direct Methanol fuel cell (DMFC)
High-temperature operation of SOFC-1800oF removes the need for a precious-metal catalyst, thereby reducing the cost.
It also allows SOFCs to reform fuels internally, which enables the use of a variety of fuels (the input to the anode can be hydrogen, carbon monoxide or methane)and reduces the cost associated with adding a reformer to the system.
The electrolyte used is a ceramic oxide which increases the cost of SOFCs.At the cathode, electrochemical reduction takes place to obtain oxide ions. These ions pass through
the electrolyte layer to the anode where hydrogen is oxidized to obtain water.In case of carbon monoxide, it is oxidized to carbon dioxide.

P ref
V fc
r
N
currentequation
F low R ateequation
Partia l P ressureEquations
Voltage Equations
I
qH 2
qO 2
pH 2O pO 2 pH 2
Where qH2 – Fuel flow (mol/s), qO2 – Oxygen flow (mol/s),
KH2 – Valve molar constant for hydrogen (kmol/s atm),
KO2 – Valve molar constant for oxygen (kmol/s atm),
KH2O – Valve molar constant for water (kmol/s atm), τH2 –
Response time for hydrogen (s), τO2 – Response time for
oxygen (s), τH2O – Response time for water (s), τe –
Electrical response time (s), τf– Fuel response time (s),
Uopt – Optimum fuel utilization, rHO – Ratio of hydrogen to
oxygen, Kr – Constant (kmol/s A), Pref – Reference power
(kW)Fig. Block diagram for dynamic model of SOFC 15

16
Power conditioning for fuel cell connected to Grid
Fuel Cell Pow er P lant
DC
DC
DC
AC
LC Filter Utility Grid
ACBUS
Couplinginductor &
T ransm issionline
DC-DC ControllerVDCref
V DC
PQ
Q ref
IabcVabc
DC BUS
DC/DCConverter
DC/ACInverter
Contro lSignal
Contro lSignal
P Q
P ref
PI PI
Pulses
dq/abc
PIPI
Idref Iqref
IdrefIqref
abc/dq
PLL Iabc
angle
Id Iq
+- +-
+ -+-
Fig. Power conditioning for fuel cell connected to Grid

17
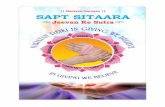
Performance of SOFCThe number of cells connected in series is taken as 450. Initially for a 50 kW of load the calculated SOFC
voltage is 403 volt.The output voltage of the DC/DC converter is maintained almost constant at 700V throughout the loading
conditions, by using a PI controller along with the DC/DC converter.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
350
400
450
Time
Fuel Cell Voltage
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
700
800
900
1000
Time
Voltage (
V)
output voltage of DC-DC converter
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
350
400
450
Time
Fuel Cell Voltage
Fig. Output Voltage waveform of SOFC and DC-DC Converter waveform

18
Control Scheme of D-STATCOM
QuadratureCom ponent Refrence
current
AC VoltagePI
controller
In phasecom ponent
Refrence current
Com pensation ofam plitude of activepow er com ponent
of current
FrequencyPI controller
Frequencym easurem ent
+-
Ua Ub Uc
Unit VoltageTem plate G enerator
Quadrature VoltageTem plete G enerator
W a W b W c
+-
+_
Va Vb Vc
Vt
Isaq
Isbq
Iscq
Vrated Prated
Vtref
*
*
*
*
*
Ism q
Isad
Isb
d
Iscd** *
Ism d*
Iam d
Ig Vabc
Fref0
*
*
Isa Isb Isc* * *
Hysteresis Current contro ller
Isn*_
+
+
Ilc
Lf,Rf
Lf,Rf
Lf,Rf
Lf,Rf
S1
-
Vdc
S2
S5 S7
S6 S8
Cdc+
S3
S4
Battery
R1
Ro
+-Voc
IlaIlb
Iln
Isa
Isb
Isc
C battery
D-STATCOM is used to mitigate the voltage dip & compensate the reactive power.
It is also capable of flicker & harmonic mitigation’s, load balancing and neutral current compensation.
STATCOM consists of DC voltage source behind self commutated inverters using IGBT & coupling transformer. It is connected in shunt with distribution feeder.
It generates a current injection, which is added to non sinusoidal load current. Thus phase current taken from grid will be nearly sinusoidal
With voltage/frequency controller output voltage and frequency can be kept constant

19
Contd…
Prated = 15KW Vrated = 415 voltThe amplitude of active component of current is i*smd = igen(n) - ismd(n)
In phase component of reference source current are estimated as: i*sad = i*smd Ua, i*sbd = i*smd Ub , i*scd = i*smd Uc
Where Ua , Ub and Uc are in-phase unit current vectors , given by
Ua = Va / Vt , Ub = Vb / Vt , Uc = Vc / Vt
Where Vt is the amplitude of supply voltage Vt = 2/3(Va2 + Vb
2 + Vc2)1/2
instantaneous quadrature component of reference source current is estimated as i*saq = i*smqwa, i*sbq = i*smqwb , i*scq = i*smqwc
The unity amplitude template having instantaneous value in quadrature with instantaneous voltage Va, Vb, Vc are derived as
Wa = -Ua /√3 + Uc /√3
Wb= √3Ua/2 + ( Ub- Uc )/2√3
Wc= -√3 Ua/2+ (Ub-Uc)/2√3

20
The total reference source current is the sum of in-phase & quadrature component of reference source current.
i*sa = i*saq + i*sad
i*sb = i*sbq + i*sbd
i*sc = i*scq + i*scd
The reference source current (i*sa,i*sb,i*sc) are compared with measured source current .The error of
current are computed as: isa_error = isa - i*sa
isb_error = isb - i*sb
isc_error = isc - i*sc
These error signals are the drive of hysteresis current controller to generate six firing pulses for VSC
Design of BESS Controller
BESS consist of a CC-VSC with the battery at DC link. The terminal voltage of battery is given by Vbattery = (2√2/√3) VL; where VL is line rms
The equivalent capacitance can be determined from Cbattery = (kwh * 3600 * 103) / 0.5 (V2
ocmax – V2ocmin)
The parallel circuit of R1 & Cbattery is used to describe the energy & voltage during charging &
discharging
Contd…

21
Simulation for Unbalanced Reactive LoadThree single phase reactive load are applied between each phase and neutral at t=1.0 sec. At t=1.4sec
one phase is removed and another at t=1.5 sec making load unbalanced
1.3 1.4 1.5 1.6 1.7 1.8
-1
0
1
Vabc(p
u)
supply voltage
1.3 1.4 1.5 1.6 1.7 1.8
-20
0
20
Iabc
supply current
1.3 1.4 1.5 1.6 1.7 1.8-20
-10
0
10
20
Time
Icap
capacitor current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Ilabc
load current
1.3 1.4 1.5 1.6 1.7 1.8-40
-20
0
20
40
Icabc
controller current
1.3 1.4 1.5 1.6 1.7 1.8-20
-10
0
10
20
Time
Isn
source neutral current
1.3 1.4 1.5 1.6 1.7 1.8-20
0
20
Iln
load neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Icn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
dc link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency
1.3 1.4 1.5 1.6 1.7 1.8-20
0
20
Iln
load neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Icn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
dc link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency

22
Simulation for Unbalanced Non Linear Load A diode rectifier with resistive load and L-C filter at its DC side is considered. At t=1.0sec balanced
non linear load is inserted at t=1.4 sec one phase is removed and another at t=1.5 sec making load unbalanced.
It seems that controller current becomes nonlinear for eliminating the harmonic current.
1.3 1.4 1.5 1.6 1.7 1.8
-1
0
1
Vabc(p
u)
supply voltage
1.3 1.4 1.5 1.6 1.7 1.8
-20
0
20
Iabc(A
)
supply current
1.3 1.4 1.5 1.6 1.7 1.8-20
-10
0
10
20
Time
Icap(A
)
capacitor current

23
Contd…
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Ilabc
Load current
1.3 1.4 1.5 1.6 1.7 1.8
-20
0
20
Icab
c
controller current
1.3 1.4 1.5 1.6 1.7 1.8
-10
0
10
Time
Isn
Source neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Ilabc
Load current
1.3 1.4 1.5 1.6 1.7 1.8
-20
0
20
Icab
c
controller current
1.3 1.4 1.5 1.6 1.7 1.8
-10
0
10
Time
Isn
Source neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Iln
load neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Isn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.8400
600
800
1000
Vdc
DC link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Iln
load neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Isn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.8400
600
800
1000
Vdc
DC link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Iln
load neutral current
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Isn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.8400
600
800
1000
Vdc
DC link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency
1.3 1.4 1.5 1.6 1.7 1.8-50
0
50
Iln
load neutral current
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-20
0
20
Icn
compensator neutral current
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
dc link voltage
1.3 1.4 1.5 1.6 1.7 1.80
20
40
60
Time
f
frequency
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
V
Vdc_V
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Te
Te
1.3 1.4 1.5 1.6 1.7 1.80
10
20
P(KW
)
P(KW)
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Time
Q(K
VAr)
Q(KVAr)
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
V
Vdc_V
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Te
Te
1.3 1.4 1.5 1.6 1.7 1.80
10
20
P(KW
)
P(KW)
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Time
Q(KV
Ar)
Q(KVAr)
1.3 1.4 1.5 1.6 1.7 1.80
500
1000
Vdc
V
Vdc_V
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Te
Te
1.3 1.4 1.5 1.6 1.7 1.80
10
20
P(KW
)
P(KW)
1.3 1.4 1.5 1.6 1.7 1.8-5
0
5
Time
Q(KV
Ar)
Q(KVAr)

24
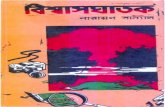
Simulation for variable Wind SpeedThe wind speed is varied continuously throughout the simulation time (t = 5sec)During wind speed variation, The DFIG output voltage remains constant i.e. at 1pu by maintaining the DC
link voltage (Vdc) constant throughout.Though wind turbine torque (Tm) is fluctuating, the electromagnetic torque of DFIG (Tem) is constant
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 513
14
15
16
Ws
(m/s
)
Wind Speed (m/s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
0
2
Vab
c (p
u)
Generator Voltage (volt)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
Tm (p
u)
Mechanical Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
-1
0
1
Time
Tem
(pu
)
Electromagnetic Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 513
14
15
16
Ws
(m/s
)Wind Speed (m/s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
0
2
Vab
c (p
u)
Generator Voltage (volt)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
Tm (p
u)
Mechanical Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
-1
0
1
Time
Tem
(pu)
Electromagnetic Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 513
14
15
16
Ws (
m/s
)
Wind Speed (m/s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
0
2
Vabc (
pu)
Generator Voltage (volt)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
Tm
(pu)
Mechanical Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
-1
0
1
Time
Tem
(pu)
Electromagnetic Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 513
14
15
16
Ws (
m/s
)
Wind Speed (m/s)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
0
2
Vabc (
pu)
Generator Voltage (volt)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
Tm
(pu)
Mechanical Torque_pu
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2
-1
0
1
Time
Tem
(pu)
Electromagnetic Torque_pu

25
Contd…
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5800
820
840
Vdc (
volt)
Vdc (V)_ GSC & RSC
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.2
1.4
Wr
(pu)
Wr (pu)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
0
20
P (
kw
)
P (KW)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-40
-20
0
20
Time
Q (
Kvar)
Q (Kvar)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5800
820
840
Vdc
(vo
lt)
Vdc (V)_ GSC & RSC
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.2
1.4
Wr
(pu)
Wr (pu)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
0
20
P (
kw)
P (KW)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-40
-20
0
20
Time
Q (
Kva
r)
Q (Kvar)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5800
820
840
Vdc
(vo
lt)
Vdc (V)_ GSC & RSC
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.2
1.4
Wr
(pu)
Wr (pu)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
0
20
P (
kw)
P (KW)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-40
-20
0
20
Time
Q (
Kva
r)
Q (Kvar)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5800
820
840
Vdc (
volt)
Vdc (V)_ GSC & RSC
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.2
1.4
Wr
(pu)
Wr (pu)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
0
20
P (
kw
)
P (KW)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-40
-20
0
20
Time
Q (
Kvar)
Q (Kvar)_DFIG
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 548
48.5
49
49.5
50
50.5
51
Sta
tor
Fre
quency
Stator Voltage Frequecy
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 549
49.5
50
50.5
51
Time
Roto
r F
requency
Rotor Voltage Frequecy
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 548
48.5
49
49.5
50
50.5
51
Sta
tor
Fre
quency
Stator Voltage Frequecy
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 549
49.5
50
50.5
51
Time
Roto
r F
requency
Rotor Voltage Frequecy

Power allocation between Grid, SOFC and Wind - DFIG
0
20
40
60
80
SO
FC P
ower
(KW
)
SOFC Power (KW)
0
50
100
Load
Pow
er (K
W)
Load Power (KW)
-100
-50
0
50
100
DFI
G P
ower
(KW
)
DFIG Power (KW)
-50
0
50
100
NLL
Pow
er (K
W)
NLL Power (KW)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-200
-100
0
100
200
Time
Grid
Pow
er (K
W)
Grid Power (KW)

27
Contd…
Sr no Type of Load % Total Harmonic Distortion
Va ia
1 Balanced Resistive load 0.33 3.23
2 Unbalanced Resistive load 0.33 3.23
3 Balanced reactive load 0.33 3.32
4 Unbalanced Reactive load 0.36 3.35
5 Balanced non linear load 0.34 3.53
6 Unbalanced nonlinear load 0.37 3.437 Balanced nonlinear load without
STATCOM5.45 49.74
Percentage THD of Supply voltage and Supply current under balanced / unbalanced linear, nonlinear load

28
ConclusionsBeing the wind energy is intermittent in nature; hybrid system constituting fuel cell; operated in
synchronism with wind generator and grid will be the feasible solution.
The interfacing of hybrid system with grid should comply the grid code requirements and power quality standards
Vector control scheme is very useful for controlling the grid side converter and rotor side converter; the system can work for any change in wind speed.
The dc link voltage of converters, rotor speed, and active power and reactive power exchange between machine and grid is almost constant during all operations.
The DFIG machine is perfectly synchronised with the SOFC -Grid and any sudden change in the load demand is met by sharing of power as per their rating.
With non linear load at PCC, the THD of supply current becomes more than IEEE-519-1992 limit (i.e. THD > 5%), hence D-STATCOM is used to restrict the total harmonic distortion caused by load.
Indirect current control scheme using hysteresis controller is useful for controlling of D-STATCOM . D-STATCOM improves the THD spectrum of source current and voltages; even in the case of any
sudden change in nonlinear load.D-STATCOM can be used as a solution to compensate reactive power, neutral current compensation,
load balancing and harmonic elimination.Power Factor correction has been done with help of D-STATCOM

29
Parameters of 15 KW, 440 V, 50Hz, DFIGRs = 0.023 pu, Rr = 0.016 pu, Ls = 0.018 pu, Lr = 0.16 pu, P = 6, J = 0.385 pu
Parameters of GSC and RSCVdc = 830 volt, Cdc = 9200 µF, Kp and Ki (GSC) = 0.83 and 5, Kp and Ki (RSC) = 0.6
and 8, Frequency of the grid-side and rotor-side PWM carrier = 2250 HZ and 1350 Hz
SOFC ParameterT = 1273K, Eo = 1.18 Volt, N= 450, Kr = .996*10-6Kmol/(s atm), Uopt = 0.85, KH2 =
8.43*10-4 Kmol/(s atm), KO2 = 2.81*10-4 Kmol/(s atm), KH2O = 2.52*10-3 Kmol/(s
atm), ), =26.1s, = 78.3 s, = 2.91 s, R = 0.16Ω, rHO = 1.145
Appendix

30
References
1. Puneet K Goel, Bhim singh, Navin kishore (2010) “Modeling and Control of Autonomous Wind Energy Conversion System with Doubly Fed Induction Generator” IEEE Int. conf. on Power Electronics, Drives and Energy systems, pp. 1-8.
2. Bhim singh, Shiv Aggrawal, Tara Chandra Kandpal (2010) “Performance of Wind Energy Conversion System using a Doubly Fed Induction Generator for Maximum Power Point Tracking” IEEE Industry App. Society Annual meeting, pp. 1-7.
3. Vishal Verma, Peeyush Pant, B. Suresh, Bhim Singh (2011) “Decoupled Indirect Current Control of DFIG for Wind Energy Applications” , IEEE Int. conf. on Power Electronics, pp. 1-6.
4. B. Singh and G. Kasal, (2008) “Voltage and Frequency Controller for a Three-Phase Four-Wire Autonomous Wind Energy Conversion System” IEEE Transactions on Energy Conversion, Vol 23, No. 2.pp-1170-1177.
5. Raul sarrias, Luis M Fernendez, Carlos A Garcia, Francisco Jurado (2012) “Coordinate operation of power sources in a doubly-fed induction generator wind turbine/battery hybrid power system ”Journal of Power Sources, Vol.205, 354–366.
6. Satish Choudhary, Kanungo Barada Mohanty, Birendra kumar Debta, (2011)“Investigation on Performance of Dou-bly-Fed Induction Generator Driven by wind turbine under Grid Voltage Fluctuation” IEEE Int. conf. on Environment and Electrical Engineering, pp.1-4.
7. N P Gupta, Preeti Gupta, Deepika Masand (2012) “Power Quality Improvement Using Hybrid Active Power Filter for A DFIG Based Wind Energy Conversion System” IEEE NUICONE, pp. 1-6.
8. E. Ribeiro, A. J. M. Cardoso, C. Boccaletti (2010) “Grid Interface for a Wind Turbine-Fuel Cell System” IEEE XIX In-ternational Conference on Electrical Machines - ICEM, pp. 1-6.
9. Nagasmitha Akkinapragada and Badrul H. Chowdhury (2006)“ SOFC-based Fuel cells for load following Stationary Applications” IEEE conference, pp. 553-560.

31