
1 MAGISTER-P: A 6 URS Parallel Haptic Device with Open Control Architecture J. M. Sabater Miguel...
12
1 MAGISTER-P: A 6 URS MAGISTER-P: A 6 URS Parallel Haptic Device with Parallel Haptic Device with Open Control Architecture Open Control Architecture J. M. Sabater J. M. Sabater Miguel Hernández University Miguel Hernández University Elche, Alicante (Spain) Elche, Alicante (Spain)
-
date post
19-Dec-2015 -
Category
Documents
-
view
221 -
download
4
Transcript of 1 MAGISTER-P: A 6 URS Parallel Haptic Device with Open Control Architecture J. M. Sabater Miguel...
1
MAGISTER-P: A 6 URS MAGISTER-P: A 6 URS
Parallel Haptic Device with Open Parallel Haptic Device with Open Control ArchitectureControl Architecture
J. M. SabaterJ. M. Sabater
Miguel Hernández UniversityMiguel Hernández University
Elche, Alicante (Spain)Elche, Alicante (Spain)

2
IntroductionIntroduction
Definitions:Definitions:Haptic Display: Haptic Display: A device configured to provide haptic
information to a human is called a haptic display.
Impedance Display.- Impedance Display.- A mechanical device which is configured to render a commanded force while providing a measurement of its position and/or velocity.
Admittance Display.- Admittance Display.- A device configured to track a commanded position or velocity while providing a measurement of force is called an admittance display.
Parallel Platform:Parallel Platform: 6 URS Parallel-Platform: 6 URS Parallel-Platform: Parallel platform whose kinematics
chains are composed by a Universal joint, an articulated parallelogram with a Rotational driven joint, and a Spherical joint.
3
Parallel Platforms as haptic devicesParallel Platforms as haptic devices
Advantages:Advantages:Low InertiaLow InertiaHigh stiffness High stiffness Low friction Low friction Gravitationnal counterbalancing Gravitationnal counterbalancing High ratio load/power High ratio load/power work as admittance work as admittanceEasy constructionEasy construction
Disadvantages:Disadvantages:Small workspaceSmall workspaceDifficult controlDifficult controlNumerical dinamic modelNumerical dinamic modelDifficult real-time implementationDifficult real-time implementation
transparency

4
Features:
• 6 dof with large workspace.
• Low friction and sensed inertia.
• Open control architecture with C-interface
• Cable transmission without gears.•Transmission rate= 13
• High bandwidth
•Work Modes.
• As Impedance Display
• As Admittance Display
• Aluminium structure with low weight.
• Hardware architecture• Pc controlled multi-axis board
• DC motors

5
Theoretical Frame for kinematics algorithmsTheoretical Frame for kinematics algorithms
Geometrical Model
Multibody Theory: Constraint Vector

6
Inverse KinematicsInverse Kinematics
Geometrical Solution: Geometrical Solution: The movement of the device is defined by the time variation of C angle between the even and odd links.
A reference system must be assigned to each link.
Auxiliar reference system:
Geometrical Model
2..0,
0
)2/3/)1*2cos((
)2/3/)1*2cos((
1
1
1
iir
ir
s joystick
joystickBn
2..0,
0
)2/3/)*2cos((
)2/3/)*2cos((
0
0
0
iir
ir
s base
baseAn
ABn
ABnnz r
ru
Annz
Annzn
xsu
suu
0
0
BnBn
ABn ssArr 0111
7
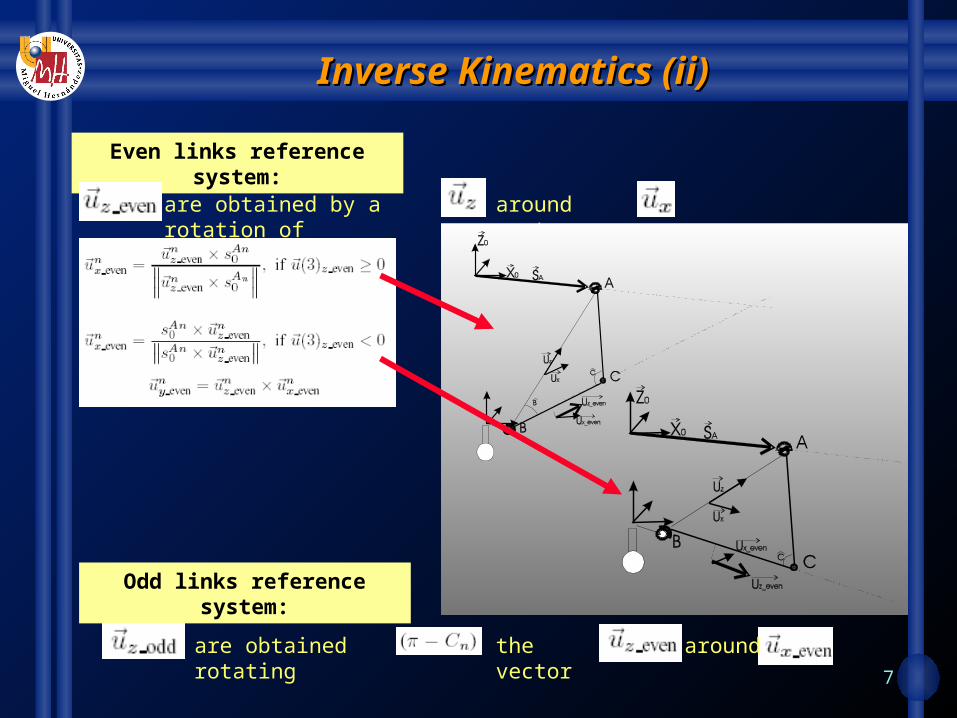
Inverse Kinematics (ii)Inverse Kinematics (ii)
Even links reference system:
Odd links reference system:
are obtained by a rotation of around vector
are obtained rotating the vector around

8
Forward KinematicsForward Kinematics
Multibody theory:Multibody theory:Constraint vector of a 6 URS parallel platformConstraint vector of a 6 URS parallel platform
Newton-Raphson methodNewton-Raphson method
0,,
191
x
P
D
K
q
tCq
q
tq
tqq
jj
q,
qqq
jjj
1

9
Simulations of an Impedance DisplaySimulations of an Impedance Display

10
MAGISTER-P: Control ModesMAGISTER-P: Control Modes
Open loop:Open loop:
Position loop:Position loop:

11
Force - Position experimentForce - Position experiment

12
THANKS FOR YOUR ATTENTIONTHANKS FOR YOUR ATTENTION


















