







Languages
Pages
Legal

1
MAGISTER-P: A 6 URS MAGISTER-P: A 6 URS
Parallel Haptic Device with Open Parallel Haptic Device with Open Control ArchitectureControl Architecture
J. M. SabaterJ. M. Sabater
Miguel Hernández UniversityMiguel Hernández University
Elche, Alicante (Spain)Elche, Alicante (Spain)

2
IntroductionIntroduction
Definitions:Definitions:Haptic Display: Haptic Display: A device configured to provide haptic
information to a human is called a haptic display.
Impedance Display.- Impedance Display.- A mechanical device which is configured to render a commanded force while providing a measurement of its position and/or velocity.
Admittance Display.- Admittance Display.- A device configured to track a commanded position or velocity while providing a measurement of force is called an admittance display.
Parallel Platform:Parallel Platform: 6 URS Parallel-Platform: 6 URS Parallel-Platform: Parallel platform whose kinematics
chains are composed by a Universal joint, an articulated parallelogram with a Rotational driven joint, and a Spherical joint.
3
Parallel Platforms as haptic devicesParallel Platforms as haptic devices
Advantages:Advantages:Low InertiaLow InertiaHigh stiffness High stiffness Low friction Low friction Gravitationnal counterbalancing Gravitationnal counterbalancing High ratio load/power High ratio load/power work as admittance work as admittanceEasy constructionEasy construction
Disadvantages:Disadvantages:Small workspaceSmall workspaceDifficult controlDifficult controlNumerical dinamic modelNumerical dinamic modelDifficult real-time implementationDifficult real-time implementation
transparency

4
Features:
• 6 dof with large workspace.
• Low friction and sensed inertia.
• Open control architecture with C-interface
• Cable transmission without gears.•Transmission rate= 13
• High bandwidth
•Work Modes.
• As Impedance Display
• As Admittance Display
• Aluminium structure with low weight.
• Hardware architecture• Pc controlled multi-axis board
• DC motors

5
Theoretical Frame for kinematics algorithmsTheoretical Frame for kinematics algorithms
Geometrical Model
Multibody Theory: Constraint Vector

6
Inverse KinematicsInverse Kinematics
Geometrical Solution: Geometrical Solution: The movement of the device is defined by the time variation of C angle between the even and odd links.
A reference system must be assigned to each link.
Auxiliar reference system:
Geometrical Model
2..0,
0
)2/3/)1*2cos((
)2/3/)1*2cos((
1
1
1
iir
ir
s joystick
joystickBn
2..0,
0
)2/3/)*2cos((
)2/3/)*2cos((
0
0
0
iir
ir
s base
baseAn
ABn
ABnnz r
ru
Annz
Annzn
xsu
suu
0
0
BnBn
ABn ssArr 0111
7
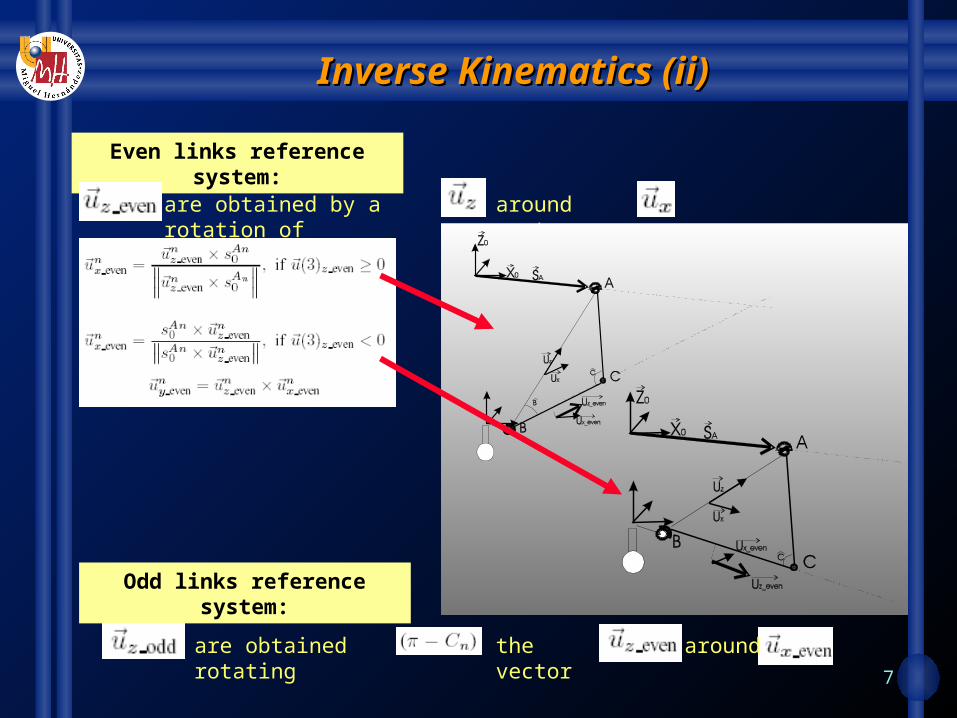
Inverse Kinematics (ii)Inverse Kinematics (ii)
Even links reference system:
Odd links reference system:
are obtained by a rotation of around vector
are obtained rotating the vector around

8
Forward KinematicsForward Kinematics
Multibody theory:Multibody theory:Constraint vector of a 6 URS parallel platformConstraint vector of a 6 URS parallel platform
Newton-Raphson methodNewton-Raphson method
0,,
191
x
P
D
K
q
tCq
q
tq
tqq
jj
q,
qqq
jjj
1

9
Simulations of an Impedance DisplaySimulations of an Impedance Display

10
MAGISTER-P: Control ModesMAGISTER-P: Control Modes
Open loop:Open loop:
Position loop:Position loop:

11
Force - Position experimentForce - Position experiment

12
THANKS FOR YOUR ATTENTIONTHANKS FOR YOUR ATTENTION
Top Related