







Languages
Pages
Legal


Xiaofei [email protected]
School of Computer Science and Technology
Harbin Institute of Technology
Model and Problem Generation Tool of Project Scheduling Problem with Spatial Resources
NICST’2013New Information
Communication Science and Technology for Sustainable Development: France-China
international workshop

Contents
Introduction
Concepts, features, classification of sRCPSP
Problem generation tool for sRCPSP
Demonstration of the tool
A scheduling algorithm for sRCPSP
Motivation
• Spatial resources usually belong to strategic/bottleneck resources of OKP and construction enterprises– High investment.– Throughput of factory highly depending on the
utilization of spatial resources– Utilizing spatial resources efficiently and schedule
activities in projects with limited capacity of spatial resources and other resources to shorten the make-span of projects and increase the output is of great significance!
– Spatial resource constrained project scheduling problem (sRCPSP)
– Ship-building process.

Background----Ship-Building process and spatial resources
Component machining
Assembling/testing at Dock
Palletized Components Collection and Distribution
ship body assembling & system assembling
Purchase and inventory
Block assembling & system pre-assembling

Outline
Article structureArticle structure
What we do?
Analyze! Modeling! Tool! Algorithm!
What to solve?
When to start activities?Where the activities are carried out?
Related research
Lee, Koh, Park K, Koh S. et al .Researches on spatial resources and SRCPSP are still limited.
Specialty
SpatialOccupied by activity group.

Concepts of spatial resource
Spatial resource is a kind of renewable resource with spatiality, which plays a role of holding or accommodating some objects in process.
It is required by a group of activities, rather than a single activity. Accordingly, the group of activities is called a spatial resource activity group.
Shipyard in ship-building process. Block assembly (erection) platform in ship-building
process.

Block assembly platform resource
• The Block assembly platform resource is occupied by blocks in the ship-building process, which is one kind of bottleneck resources. Utilizing the site resource efficiently is of great significance to improve the production efficiency.

DirectivityDirectivityDivisibilityDivisibilitySpatialitySpatiality
Use (σ1,σ2,σ3) to represent spatiality、 divisibility and directivity,such as ( 1,d,o) represent 1-dimensional、 can be divided and single-ended release space resource, it can be further simplified as 1do .
Characters of Spatial Resource

Classification of the task
Call activityMovable activity Release activity
• Apply spatial resources needed by activity group
• Spatial resources are movably occupied
• Release the space occupied by activity group
Spatial resource is occupied by activity group while not single activity.
There are three kinds of activity in the activity group.

Formulation of sRCPSP
The formulation of SRCPSP with objective minimizing make-span is as following:
(1)Minimizes the make-span of the project.
(2)Denotes the renewable resource related constraints.(3)Forces activities to start
after its immediately precedes.(4)Forces every activity to
start not before zero.(5)Means that the requirement of every activity group should be satisfied.
(6)Ensures that spatial resource blocks allocated to concurrent activity groups are not overlapped.
(7)Denotes that activity group does not occupy spatial resource before starting or after ending.(8)Denotes the constraints of spatial
resource availability.

A problem generation tool
Incorporating spatial resources
Has the full function of ProGENA problem generation tool for sRCPSP.
Based on ProGEN
Code in java
Enrich the tool set of project scheduling

Definition for Input
• Base file (Input) describes the constraints for project scheduling problem.
– Parameters about activity group:
MinNofTaskG(MaxNofTaskG): The min(max)number of activity groups in every subproject;
MinNofJobTask(MaxNofJobTask): The min(max) number of activities in every activity group;
MinNofQJob(MaxNofQJob): The min(max)number of request activities in every activity group;
MinNofMJob(MaxNofMJob): The min(max)number of movable activities in every activity
group.
– Parameters about spatial resources:
NofSR: The number of spatial-resource types;
SRAmin(SRAmax): The min(max)kinds of the spatial resources of SRA type;
SRAminDemand(SRAmaxDemand): The min(max) needs of SRA type;
SRARmin(SRARmax): The min(max)kinds of needs of activity group for SRA type;
SRAF: The resource factor of SRA type;
SRAS: The resource intensity of SRA type;
Definition for Output
• Example file (Output) is used to describe a specific spatial resources project scheduling problem instance.
– Additional Parameters (Input and output contain all of the PROGEN’s parameters respectively):
– the information of activity group, – the space resources needed by every activity group, – the amount of available space resources – the direction of space resources.
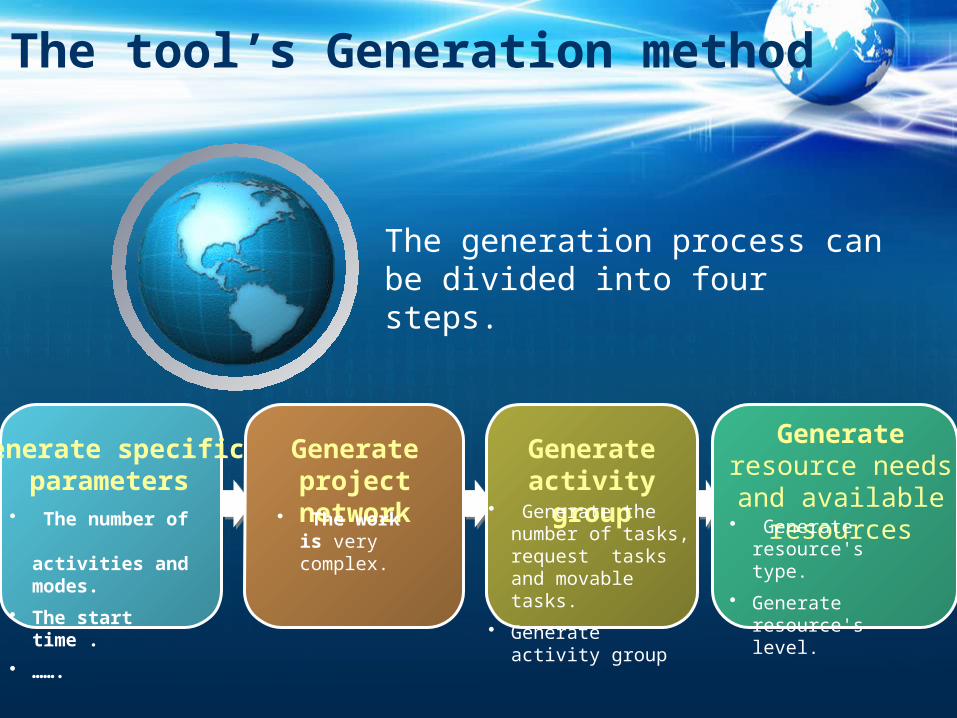
The tool’s Generation method
The generation process can be divided into four steps.
• The number of activities and modes.
• The start time .
• …….
Generate specific parameters
Generate project network
Generate activity group
Generate resource needs and available
resources• The work is
very complex.
• Generate the number of tasks, request tasks and movable tasks.
• Generate activity group
• Generate resource's type.
• Generate resource's level.
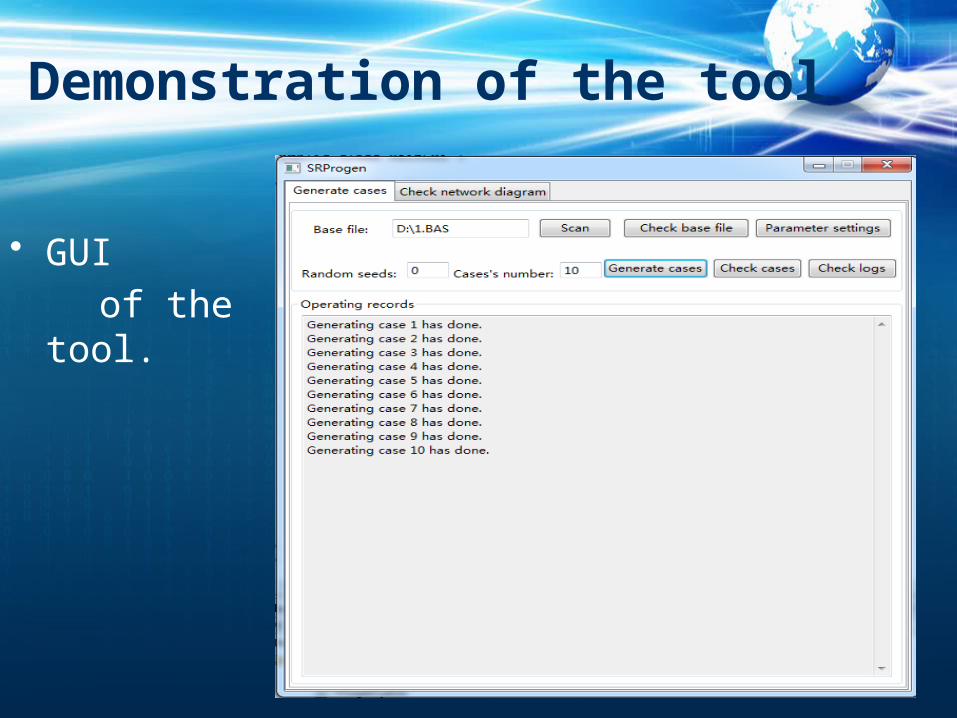
Demonstration of the tool
• GUI
of the tool.

Demonstration of the tool
• An instance of example file.

Demonstration of the tool
Project network
with activity group has been generated.

A preliminary scheduling algorithm for sRCPSP
Where to placeWhere to place When to placeWhen to place
• The heuristic space scheduling algorithm.
• Base on configuration space theory.
• Solve the problem of optimal space layout.
• The space resources restricted project scheduling algorithm.
• Base on artificial bee colony ABC.
• Solve the problem of regular and spatial resources scheduling.

Visual scheduling results
The algorithm has a good performance in solving RCPSP with both traditional resource and spatial
resource!
The utilization percent of each resource: [69%,
71%,82%,56%,89%]
Activity number: B-011Duration: 9 days
Start time: 2012-11-05The occupation of each resource: [8,10,9,2,10]
Summary
Concepts Features
Classification
Base on ProGEN
Consider regular and space resources
restricted
Demonstration
Modeling
Formulation
Generation method
Input and output
Click to add Title
Click to add Title
Base on Configuration space theoryBase on Artificial bee colony ABCDemonstration
Summary
sRCPSP
Generation tool
Scheduling algorithm

Further works
• Thanks Prof. Alain Quilliot for guidance in design algorithm for sRCPSP.
• Further works:– Better model and algorithms– Domain specific sRCPSP – …
• Collaborating with LIMOS on sRCPSP research

Merci!Thank You!谢谢!
Q & A!Xiaofei Xu
[email protected] of Computer Science
and TechnologyHarbin Institute of Technology
Top Related