







Languages
Pages
Legal


1
Robotics for Semiconductor Manufacturing: Past, Present, Future
Presented at the Asilomar Microcomputer Workshop
29 April 2010
by
Dr. Karl Mathiakmathia (at) zitechengineering (dot) com

2Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Book
With excerpts from my book
Robotics for Electronics Manufacturing –Principles and Applications in Cleanroom Automation
by Karl Mathia (2010). Cambridge University Press

3Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Agenda
How clean are we? Trends in Industrial Robotics Semiconductor Automation: Past and Present Cleanroom Robotics Design of Atmospheric Robots Design Vacuum Robots
Robot Quality Control Trends and Possibilities

4Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
How clean are we?
We are not clean enough for modern semiconductor manufacturing
Human contamination at different levels of motion (*measured particles were 0.3 µm and larger).
Automation, incl. cleanroom robots, is critical.
Human Motion
Heat emission (kW)
Moisture emission (gram/hour)
Particle emission* (particles/min)
Breathing requirements (m3/hour)
At Rest 0.12 90 100,000 0.50 Light Work 0.18 180 1,000,000 1.00 4.8 km/h 0.3 320 5,000,000 2.15 6.4 km/h 0.4 430 10,000,000 2.55

5Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
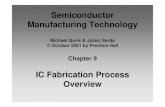
How clean are we?
International Technology Roadmap for Semiconductors 2010: CD=45 nm, critical particle size=23 nm Class 1: contamination limit=100/m3
0102030405060708090
100
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
2017
2018
Year
CD
, Crit
ical
Par
ticle
Siz
e [n
m]
Technology Node (CD) Critical Particle Size 2009 Detection Limit
2009 detection

6Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends in Industrial Robotics
Shipments of industrial robots by applicationSource: World Robotics 2008 (IFR, 2008)
0
5,000
10,000
15,000
20,000
25,000W
eldi
ng
Han
dlin
g
Cle
anro
om
Ass
embl
y
Dis
pens
ing
Proc
essi
ng
Application
Indu
stria
l rob
ots
AmericasAsia
0
5,000
10,000
15,000
20,000
25,000W
eldi
ng
Han
dlin
g
Cle
anro
om
Ass
embl
y
Dis
pens
ing
Proc
essi
ng
Application
Indu
stria
l rob
ots
AmericasAsia

7Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends in Industrial Robotics
Operational stock of industrial robots (*estimate). Source: World Robotics 2008, IFR, 2008
0
200,000
400,000
600,000
800,000
1,000,000
1,200,000
1973
1983
1990
1995
2000
2005
2007
2011
*
Year
Indu
stria
l rob
ots

8Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends in Industrial Robotics
Price index for industrial robots 1990-2005Source: World Robotics 2005 (IFR, 2006)
0
10
20
30
40
50
60
70
80
90
100
1990 1995 2000 2005Year
Pric
e in
dex
[%] without quality adjustment
with quality adjustment

9Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Tool Automation (Robotics)
Interbay (AMHS)Intrabay (Reticle Handling)
Fab Mgmt (Software)Services (Operators)
Semiconductor Automation

10Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Substrate handling at ambient atmospheric pressure in tools
3 to 5 axes of motion SCARA-type arm is the
most common kinematics Handle a variety of
substrates (150–300 mm wafer, reticles)

11Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Design for cleanliness and product safety: Clean materials Preventing electrostatic charges Clean drive trains Surface finishes End-effectors

12Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Clean materials: Minimize particle contamination from
contact, friction, out-gassing Stainless steel: excellent, expensive Aluminum: cheap, popular Plastics: small parts, harsh environm. Ceramics: excellent, very expensive Composites: instead of metal, ceramics

13Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Clean materials: wear resistance comparison for selected materials
PEEK (polyetheretherketone): thermoplasticVespel® (polyimide): plasticPFA (perfluoroalkoxy): plastic
Material Wear rate ( -1μm hour )
Dynamic friction coeff. (m·s-1)
Plastics (not reinforced) PEEK, pure 17.75 0.42 Composites: PEEK, carbon-fiber reinforced 2.16 0.29 PEEK, glass-fiber reinforced 2.36 0.26 Vespel CR-61001 0.69 0.20 PFA, carbon-fiber reinforced 1.19 0.18

14Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Preventing electrostatic discharges (ESD): Risk is ESD-event between sensitive
devices and a robot end-effector Product damage Robot malfunction or failure Electromagnetic interference, impact
on sensors and communicationsPrevention: grounding, conductive surface

15Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Electrostatic field limits per technology node (ITRS)
0
50
100
150
200
250
2000
2002
2003
2004
2005
2006
2007
2008
2009
2012
2015
2018
Year
Fiel
d S
treng
th [V
/cm
]
0
50
100
150
200
Tech
nolo
gy N
ode
[nm
]
Technology Node Field Strength

16Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Clean drive trains: All parts below substrate/wafer Evacuate generate particles Minimize number of moving parts Motor selection (brushless or direct
drives…) Careful selection of belts and pulleys Maintainability of drive train (access,…)

17Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
Evacuating airborne particles
Fan
Motors
Belts
Air flow
Evacuated particles

18Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Atmospheric Robots
End-effectors: edge-gripper, minimal contact

19Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Vacuum Robots
Substrate handling in vacuum ≤10-8 Torr pressure Dynamic vacuum barrier (seal)
transfers motion into vacuum Suitable materials (outgassing)
Low profile: Small chamber (pump-down time) SEMI standard compatibility
Suitable controls: Prevent wafer slippage without
vacuum gripping, smooth trajectories Provide required wafer throughput

20Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Vacuum Robots
Vacuum robot inside vacuum cluster tool
Vacuum
Load lock
Ambient atmosphere
Vacuum chamber
Static vacuum barrier (gasket, O-ring, etc.)
Area where dynamic vacuum barrier is located
Chuck

21Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Vacuum Robots
Design for cleanliness and product safetyVacuum integrity: Static vacuum barrier Dynamic vacuum barrier Magnetic feedthrough Metal bellow Magnetic coupling Motors with integrated vacuum barrier Lip seal Harmonic drive

22Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Vacuum Robots
Estimated vacuum level and market share of manufacturing processes
Process Estimated Market share
Typical Vacuum Level
Etch 28% medium Chemical vapor deposition 30% medium to low Molecular beam epitaxy 3% ultra-high E-beam ultra-high to high Sputtering ultra-high Physical vapor deposition
11%high
Atomic layer deposition 1% medium Ion implant 11% High Inspection and metrology 9% High Ashing 3% high to low

23Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Vacuum Robots
Robot assembly and handling: Gloves, hairnets, gowns, shoe covers
1.E-05
1.E-04
1.E-03
0 1 2 3 4 5 6 7 8 9Time (hour)
Pre
ssur
e (P
a)
with fingerprint
without fingerprint
10-3
10-4
10-5

24Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends and Possibilities
Future possibilities: 450 mm wafers Will 450 mm happen? (So far Intel, TSMC, and
Samsung support it.) Risk: who will pay for the wafer size transition?
(300 mm is not paid for yet [SEMI])Consequence for robotics: technical challenge is
moderate. Scale up the robots and increase their reliability.

25Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends and Possibilities
Wafer size transitions
0
50
100
150
200
250
300
350
400
450
1970 1975 1980 1984 1988 1995 1998 2012
Year
Waf
er S
ize
[mm
]
0
50
100
150
200
250
Are
a In
crea
se [%
]
Wafer Size [mm] Area Increase [%]

26Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends and Possibilities
Future possibilities: 3-dimensional devices Are 3D devices a possibility, with an increased
number of metal layers and denser 300 mm circuitry?
Risk: more process steps, increased processing time, therefore a higher risk of reduced yield.
Cost per wafer would increase (cost per process step is assumed constant)
Consequence for robotics: same form factors, but higher speed, tighter cleanliness requirements

27Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends and Possibilities
Future possibilities: new materials Non-Silicon materials (GaAs,…) are fragile Small wafers (e.g. GaAs): LED mfg is typical,
may become high-volume niche with larger substrates
Glass substrates? Cross contamination (example: copper)Consequence for robotics: same form factor, but
increased reliability

28Karl Mathia; Email: [email protected], URL: www.zitechengineering.com
Trends and Possibilities
Conclusion: no significant hardware challengesInstead, software challenges: Smart/intelligent features: algorithms, software Increase autonomy, reduce human labor Examples: plug’n’play system startup, automatic
calibration, remote diagnostics, parameter monitoring and failure prediction, unscheduled (not scheduled) maintenance
Consequence for robotics: similar hardware, but smarter software
Top Related