







Languages
Pages
Legal


Motion and Manipulation
2011/2012Frank van der Stappen
Game and Media Technology
Context
Robotics Games (VEs)
Geometry
Contents
• Introduction– Geometric Modelling
• Motion– Kinematics– Configuration Space– Path Planning Algorithms– Collision Detection– Extensions to Basic Planning

Contents
• Manipulation– Kinematics for Linkages– Inverse Kinematics– Projective Geometry– Grasping– Non-prehensile Manipulation
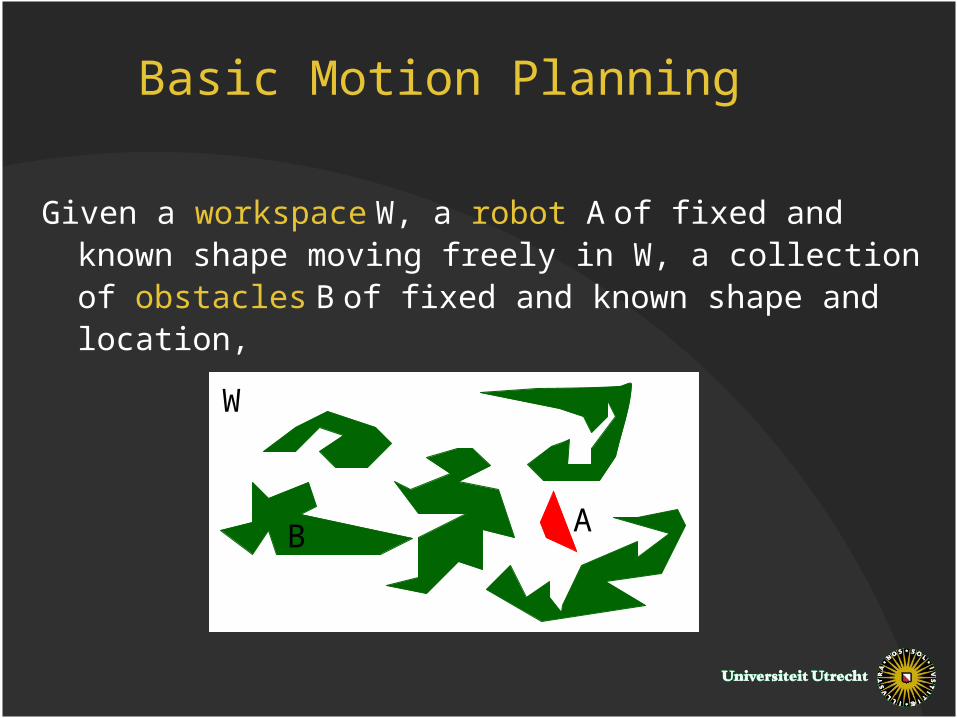
Basic Motion Planning
Given a workspace W, a robot A of fixed and known shape moving freely in W, a collection of obstacles B of fixed and known shape and location,
W
AB

Basic Motion Planning
and an initial and a final placement for A,
find a path for A connecting these two placements along which it avoids collision with the obstacles from B [80s]
Solution takes place in high-dimensional configuration space C
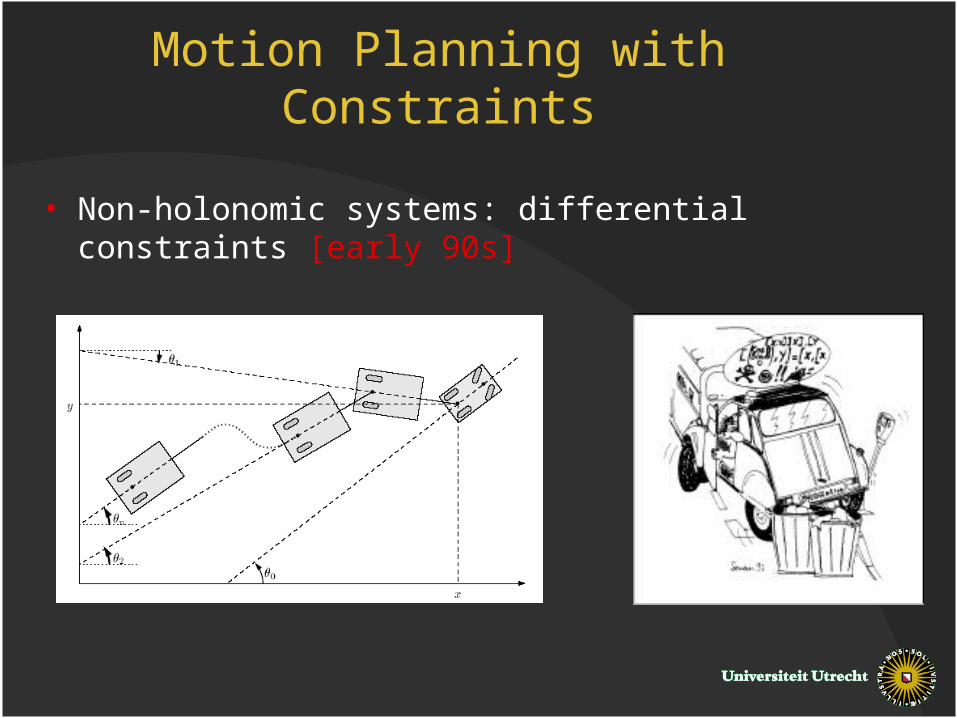
Motion Planning with Constraints
• Non-holonomic systems: differential constraints [early 90s]

Motion in Complex Environments
• Applications for logistics: assembly, maintenance [late 90s]

Motion Planning with Many DOF
• Applications in virtual environments [early 00s]

Motion in Games
• Natural paths for characters and cameras
Motion in Games
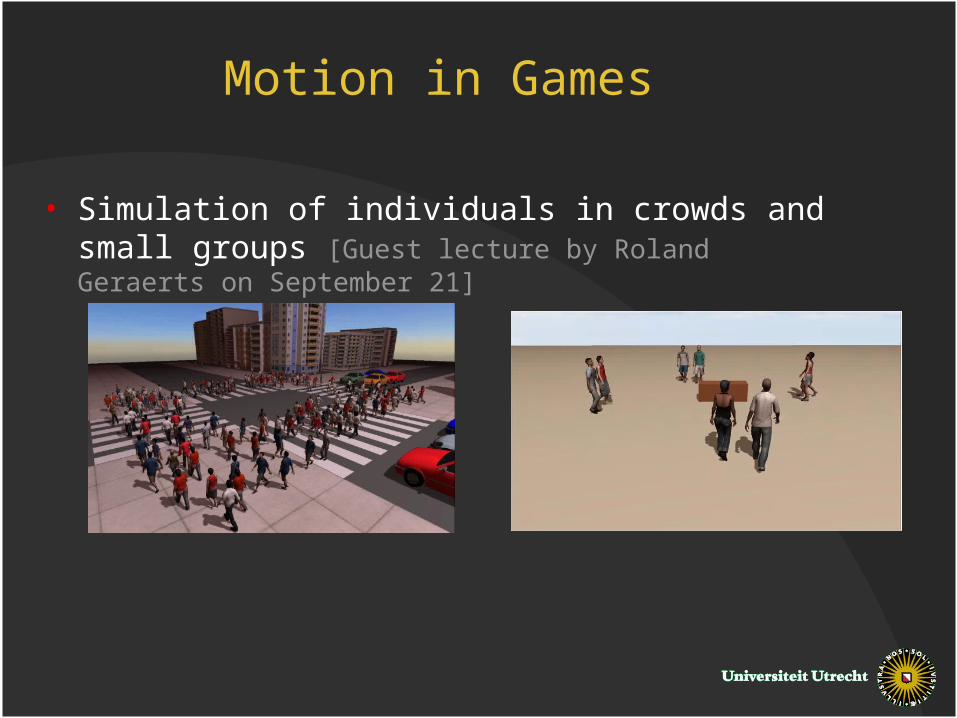
• Simulation of individuals in crowds and small groups [Guest lecture by Roland Geraerts on September 21]

Motion in Games
• Animation– Motion of virtual characters– Facial animation[Course by Arjan Egges in 2nd period]
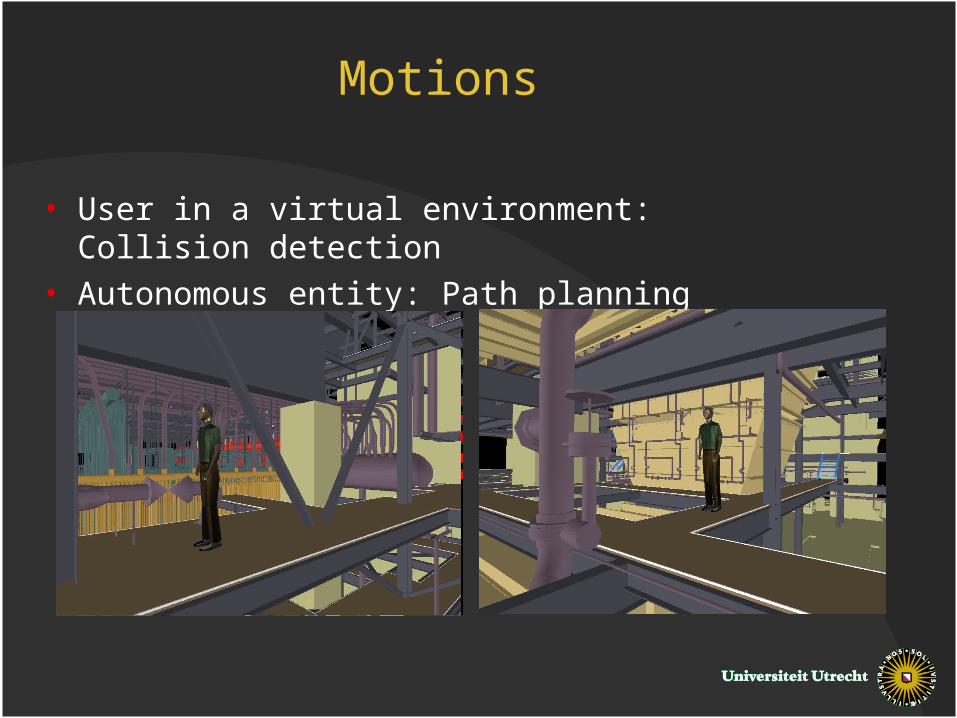
Motions
• User in a virtual environment: Collision detection
• Autonomous entity: Path planning
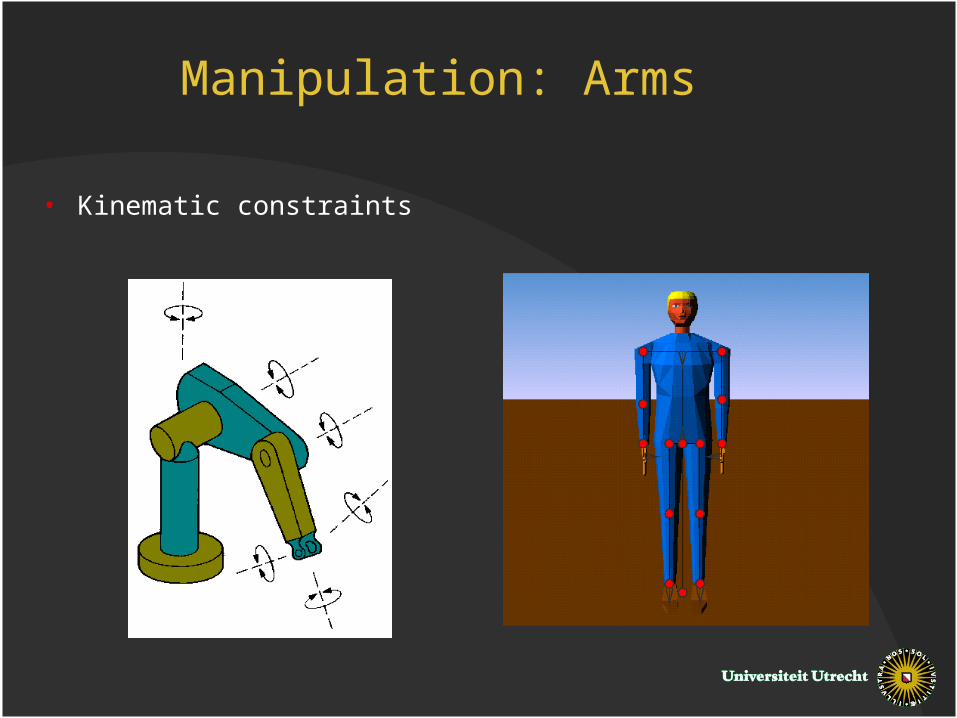
Manipulation: Arms
• Kinematic constraints
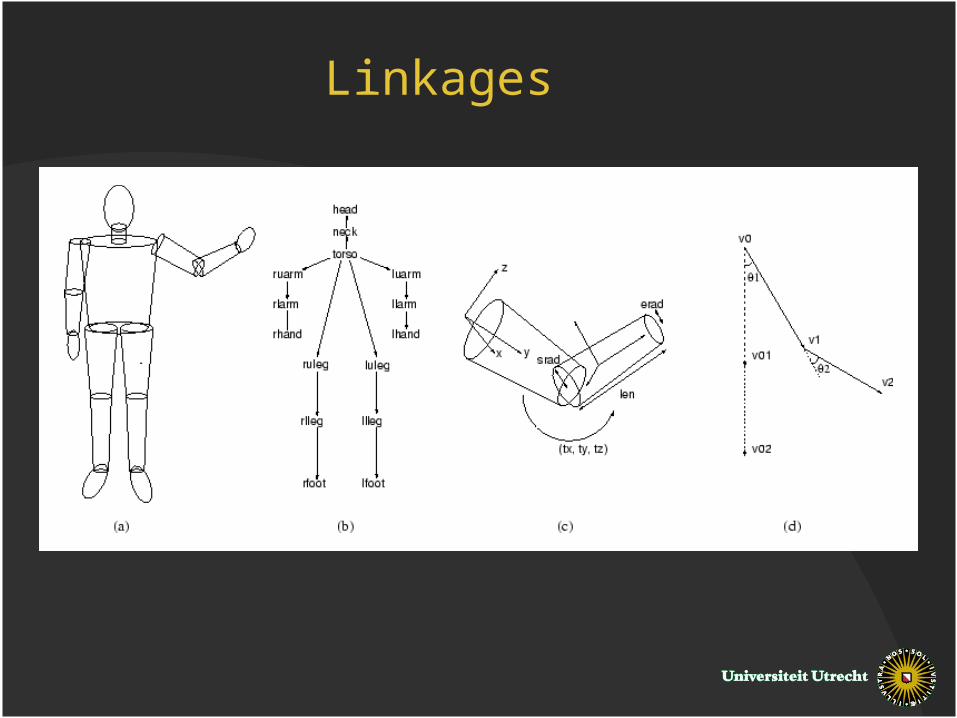
Linkages
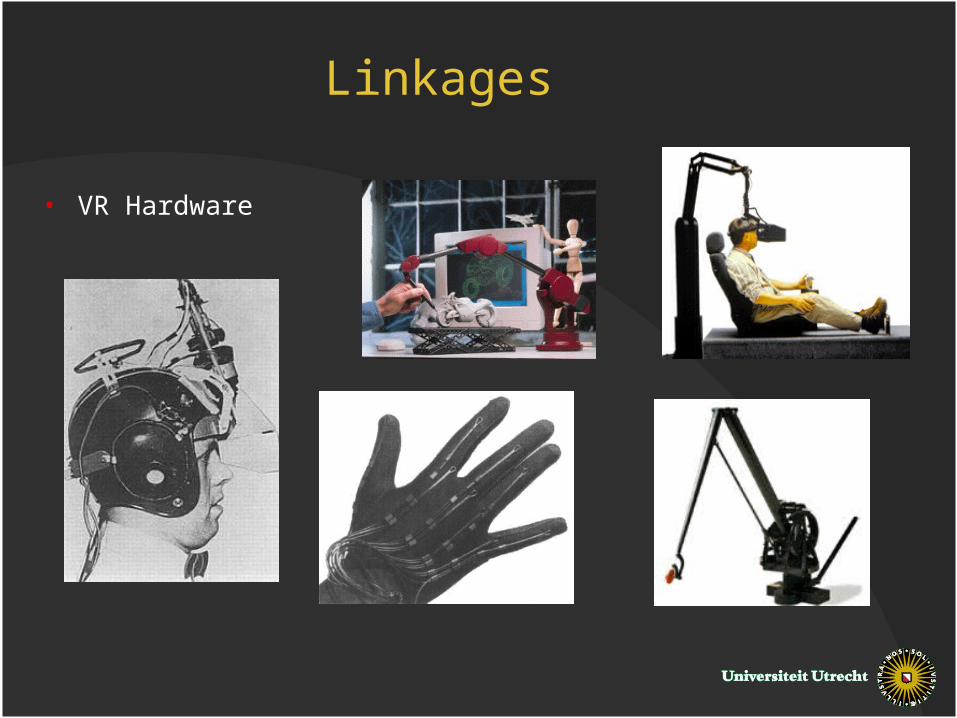
Linkages
• VR Hardware
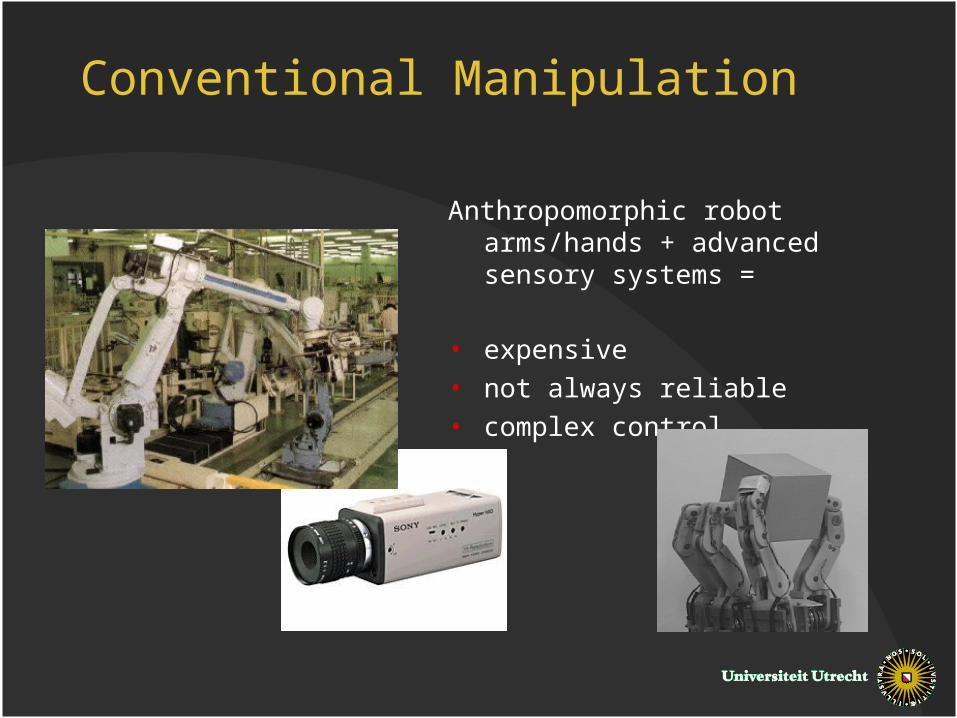
Conventional Manipulation
Anthropomorphic robot arms/hands + advanced sensory systems =
• expensive • not always reliable• complex control
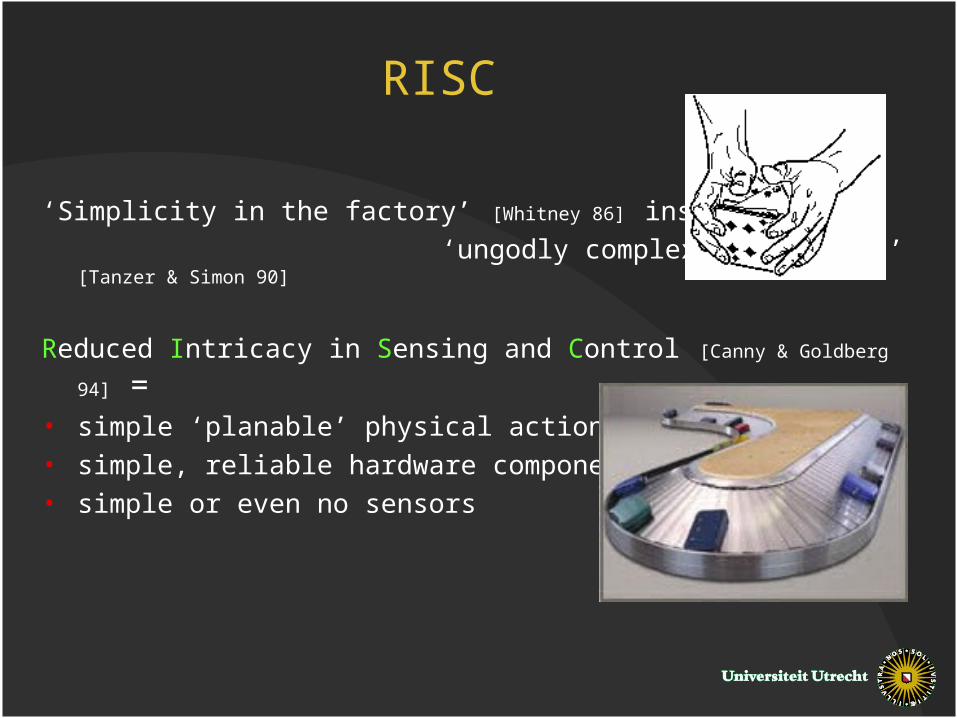
RISC
‘Simplicity in the factory’ [Whitney 86] instead of ‘ungodly complex robot hands’ [Tanzer & Simon 90]
Reduced Intricacy in Sensing and Control [Canny & Goldberg 94] = • simple ‘planable’ physical actions, by• simple, reliable hardware components• simple or even no sensors
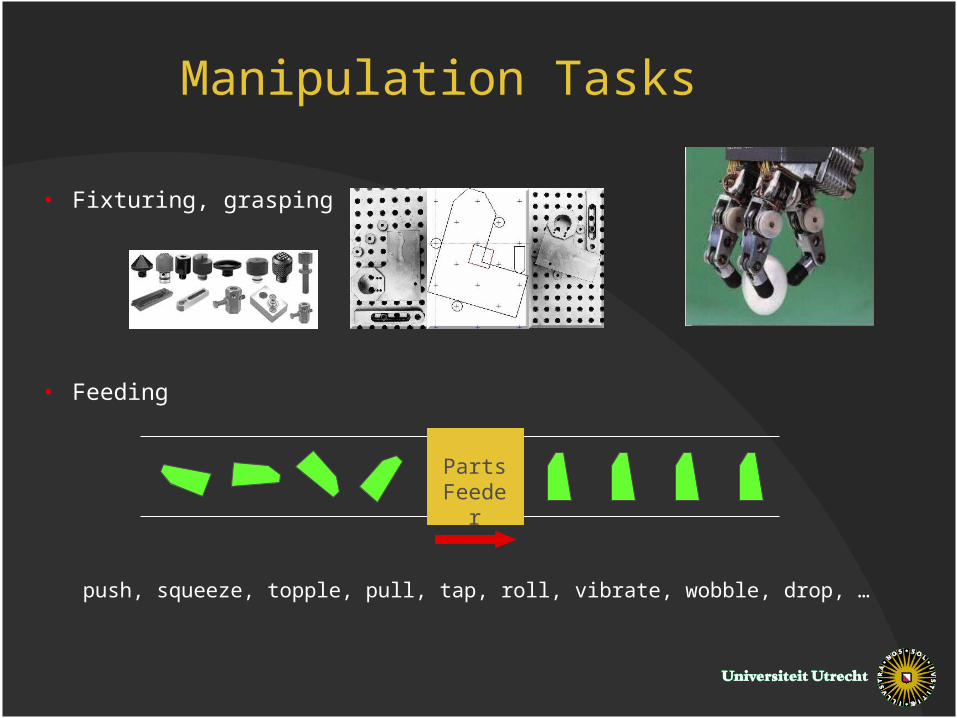
Manipulation Tasks
• Fixturing, grasping
• Feeding
push, squeeze, topple, pull, tap, roll, vibrate, wobble, drop, …
Parts Feede
r

Parallel-Jaw Grippers
• Every 2D part can be oriented by a sequence of push or squeeze actions.
• Shortest sequence is efficiently computable [Goldberg 93].

Feeding with ‘Fences’
• Every 2D part can be oriented by fences over conveyor
belt.
• Shortest fence design efficiently computable [Berretty, Goldberg, Overmars, vdS 98].

Feeding by Toppling
• Shortest sequence of pins and their heights efficiently computable [Zhang, Goldberg, Smith, Berretty, Overmars 01].
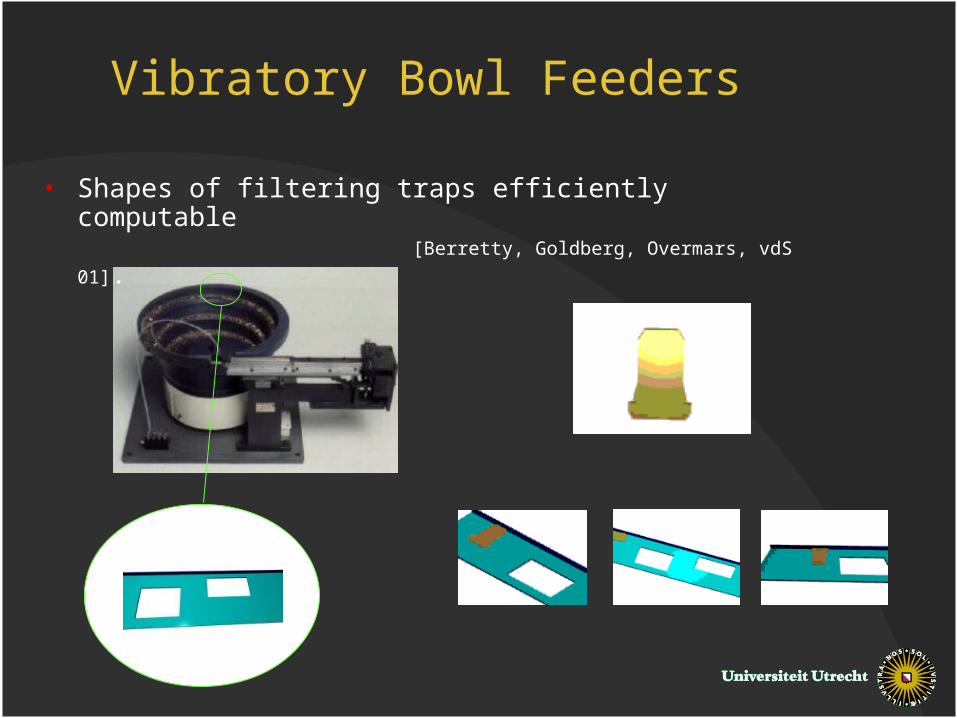
Vibratory Bowl Feeders
• Shapes of filtering traps efficiently computable [Berretty, Goldberg, Overmars, vdS 01].
Course Material
• Steven M. LaValle, Planning Algorithms, 2006, Chapters 3-7. Hardcopy approximately € 50-60. http://msl.cs.uiuc.edu/planning/index.html. Free!
• Robert J. Schilling, Fundamentals of Robotics: Analysis and Control, 1990, Chapters 1 and 2 (partly). Copies available.
• Matthew T. Mason, Mechanics of Robotic Manipulation, 2001. Price approximately € 50.

Teacher
Frank van der Stappenhttp://people.cs.uu.nl/frankst/
• Office: Buys Ballotlaboratorium 422 phone: 030 2535093; email: [email protected]
• Program leader for Game and Media Technology; MSc projects on grasping, manipulation, and path planning
Classes
• Wednesday 15:15-17:00 in BBL-079 MIN-208.
• Friday 11:00-12:45 usually in AARD-KLEIN, but in DDW-1.22 on September 23 and in RUPPERT-C MIN-208 on October 14.
• Written test:– first chance: Friday November 11, 13:30-15:30– second chance: Friday January 6, 13:30-15:30Dates are tentative, check website regularly!

Exam Form
• Written exam about the theory of motion and manipulation; weight 60%.
• Summary report (> 15 pages of text) in pairs on assigned collection of papers; weight 40%. Deadline: Wednesday November 2, 17:00.
• Additional requirments: – Need to score at least 5.0 for written exam to pass course. – Need to score at least 4.0 to be admitted to second chance
Top Related