Motion and Manipulation
28
Motion and Manipulation 2011/2012 Frank van der Stappen Game and Media Technology
-
Upload
iona-cleveland -
Category
Documents
-
view
46 -
download
1
description
Motion and Manipulation. 2011/2012 Frank van der Stappen Game and Media Technology. Context. Robotics. Games (VEs). Geometry. Contents. Introduction Geometric Modelling Motion Kinematics Configuration Space Path Planning Algorithms Collision Detection Extensions to Basic Planning. - PowerPoint PPT Presentation
Transcript of Motion and Manipulation

Motion and Manipulation
2011/2012Frank van der Stappen
Game and Media Technology
Context
Robotics Games (VEs)
Geometry
Contents
• Introduction– Geometric Modelling
• Motion– Kinematics– Configuration Space– Path Planning Algorithms– Collision Detection– Extensions to Basic Planning

Contents
• Manipulation– Kinematics for Linkages– Inverse Kinematics– Projective Geometry– Grasping– Non-prehensile Manipulation
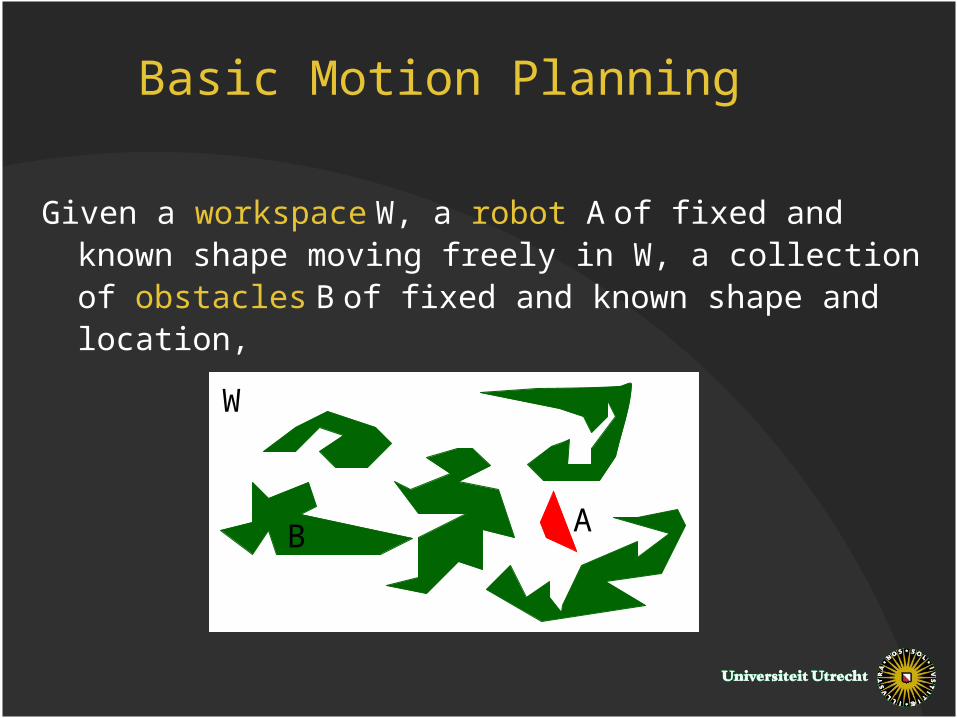
Basic Motion Planning
Given a workspace W, a robot A of fixed and known shape moving freely in W, a collection of obstacles B of fixed and known shape and location,
W
AB

Basic Motion Planning
and an initial and a final placement for A,
find a path for A connecting these two placements along which it avoids collision with the obstacles from B [80s]
Solution takes place in high-dimensional configuration space C
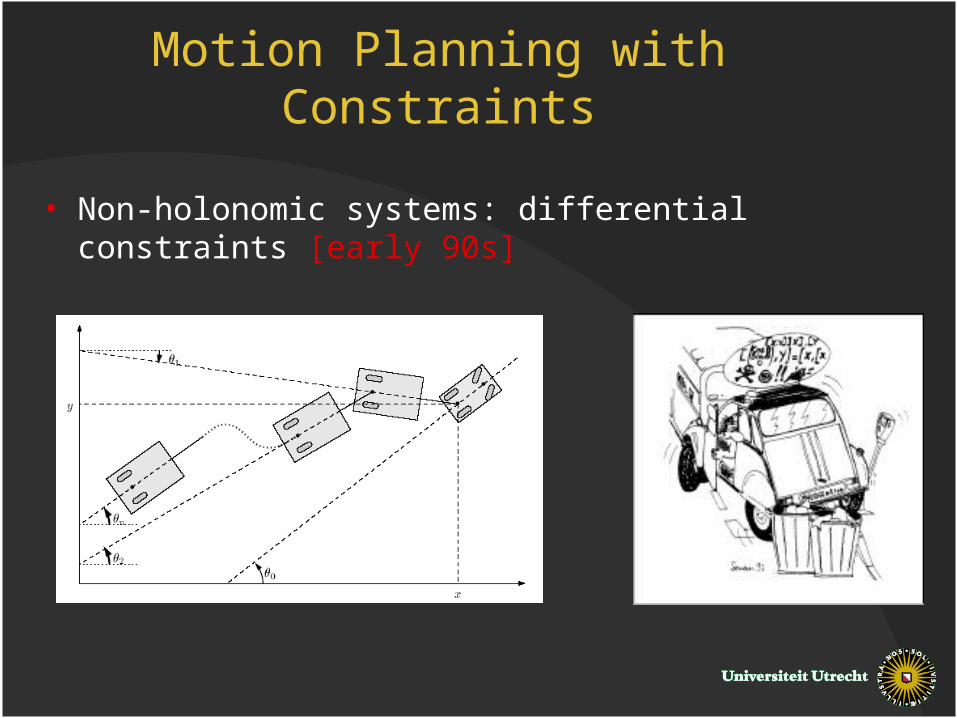
Motion Planning with Constraints
• Non-holonomic systems: differential constraints [early 90s]

Motion in Complex Environments
• Applications for logistics: assembly, maintenance [late 90s]

Motion Planning with Many DOF
• Applications in virtual environments [early 00s]

Motion in Games
• Natural paths for characters and cameras
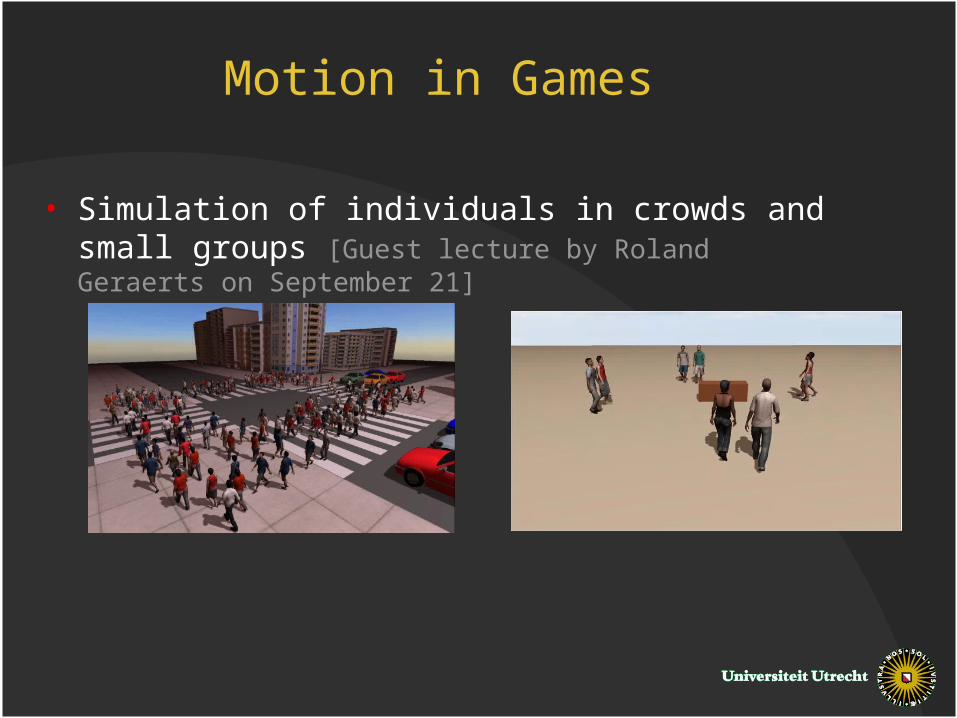
Motion in Games
• Simulation of individuals in crowds and small groups [Guest lecture by Roland Geraerts on September 21]

Motion in Games
• Animation– Motion of virtual characters– Facial animation[Course by Arjan Egges in 2nd period]
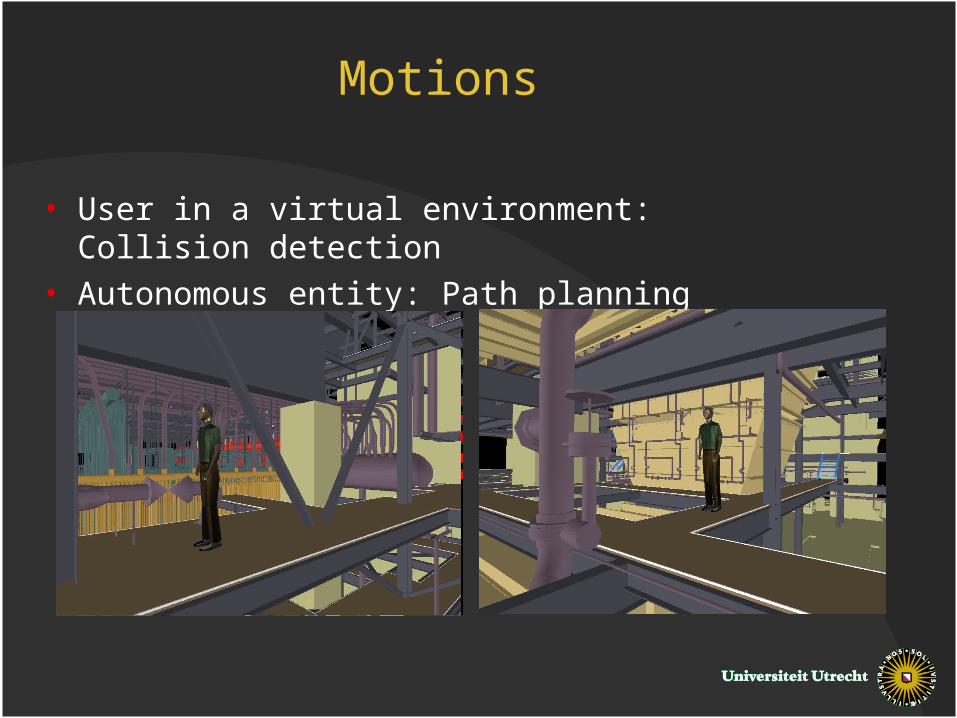
Motions
• User in a virtual environment: Collision detection
• Autonomous entity: Path planning
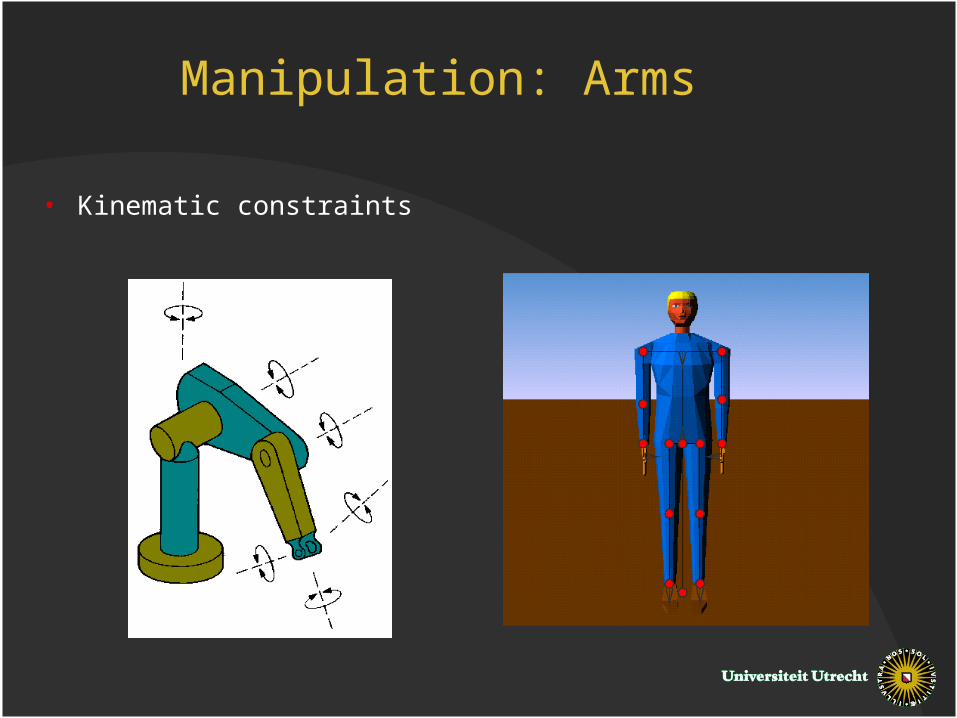
Manipulation: Arms
• Kinematic constraints
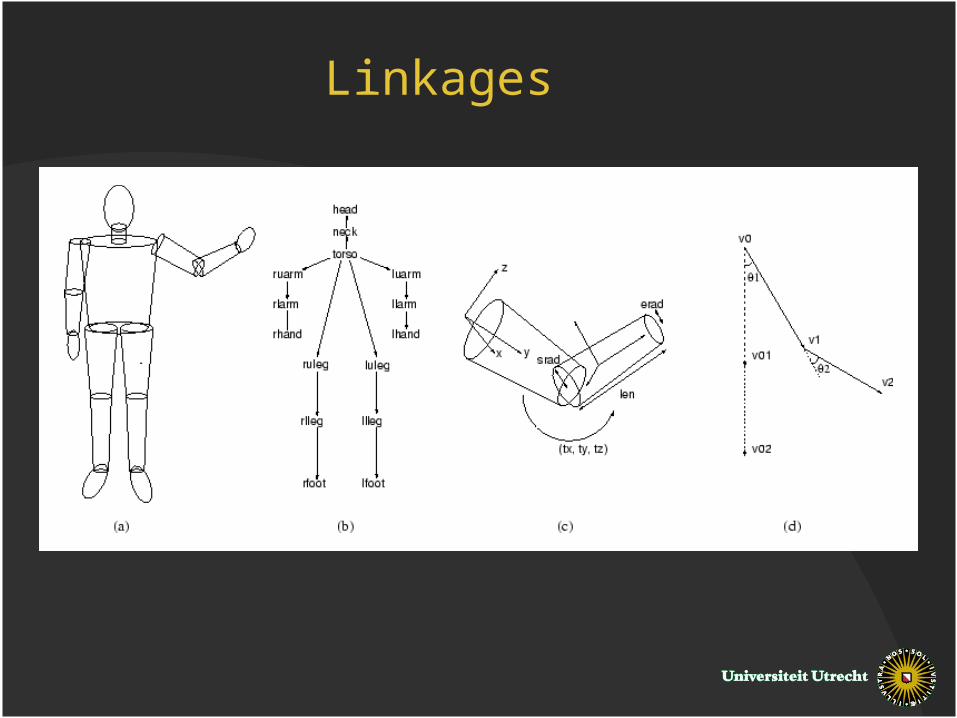
Linkages
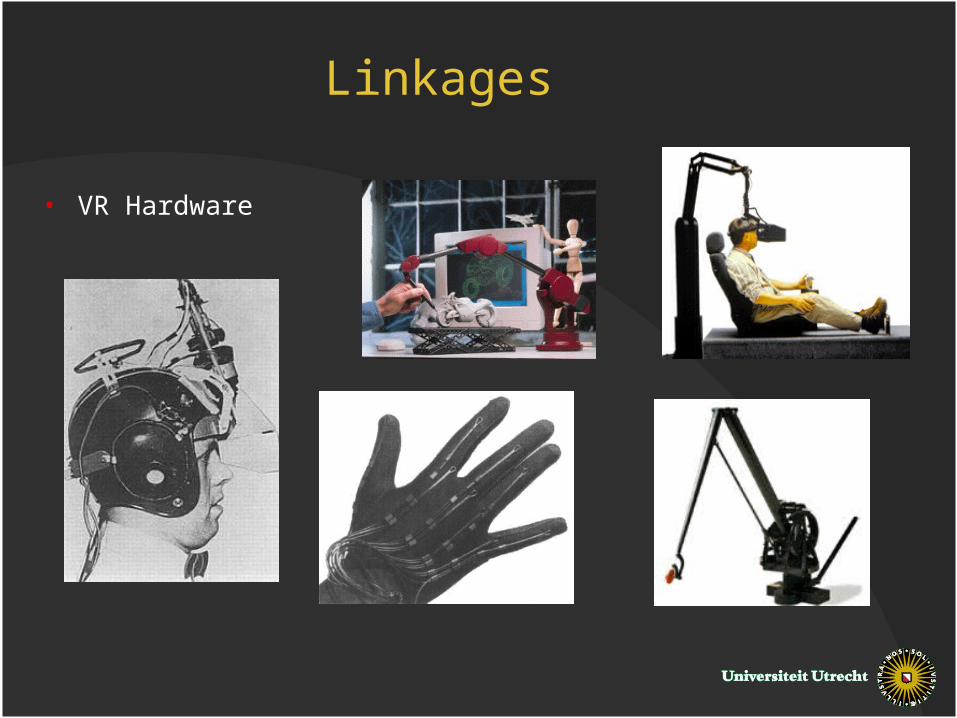
Linkages
• VR Hardware
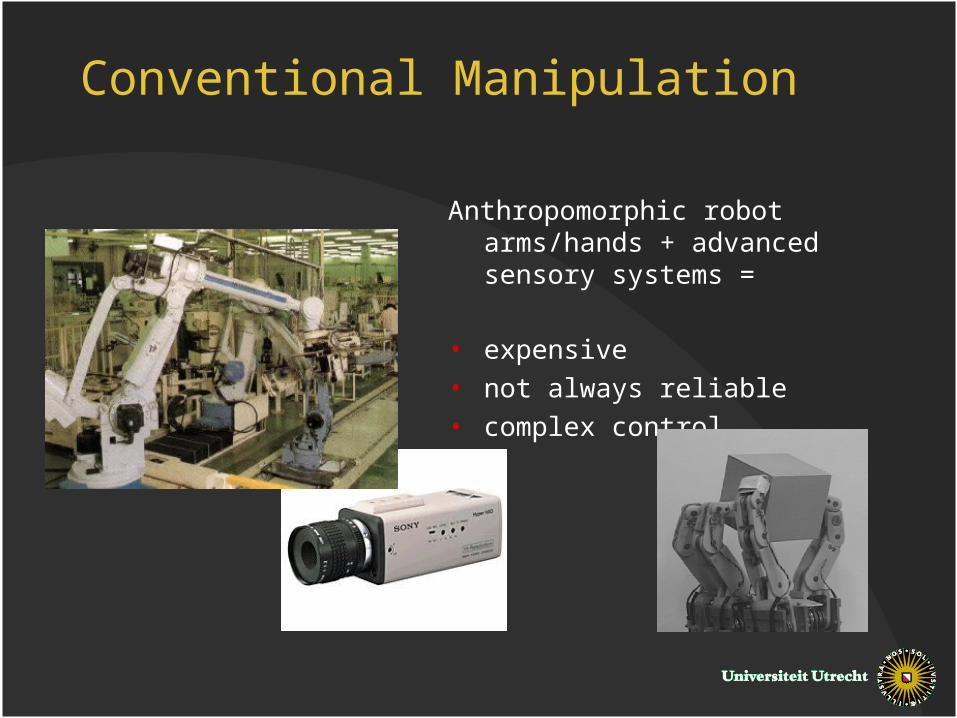
Conventional Manipulation
Anthropomorphic robot arms/hands + advanced sensory systems =
• expensive • not always reliable• complex control
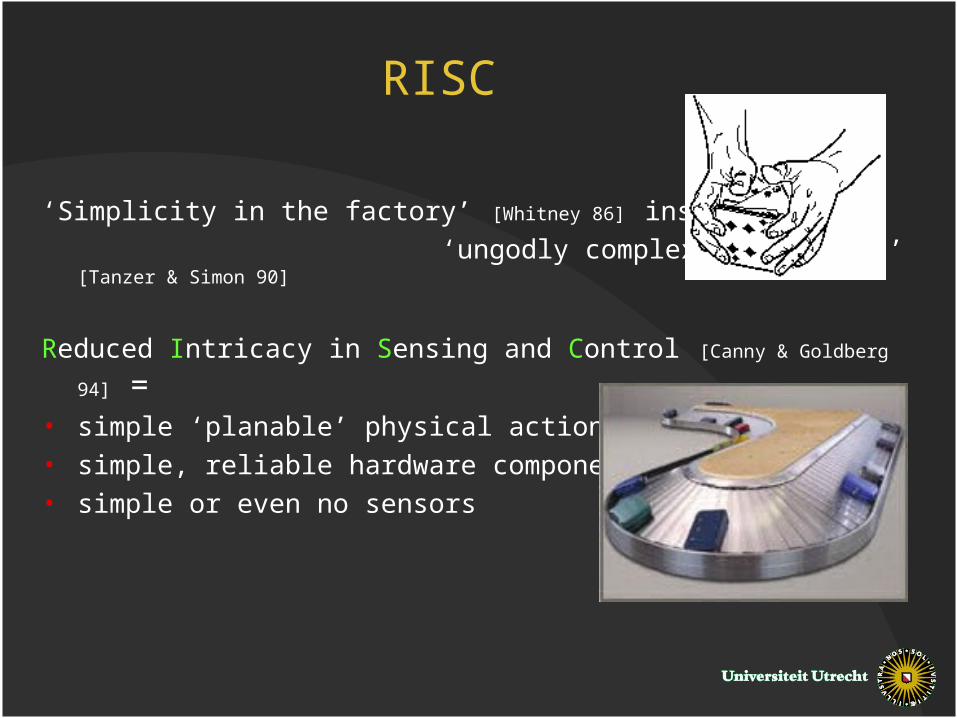
RISC
‘Simplicity in the factory’ [Whitney 86] instead of ‘ungodly complex robot hands’ [Tanzer & Simon 90]
Reduced Intricacy in Sensing and Control [Canny & Goldberg 94] = • simple ‘planable’ physical actions, by• simple, reliable hardware components• simple or even no sensors
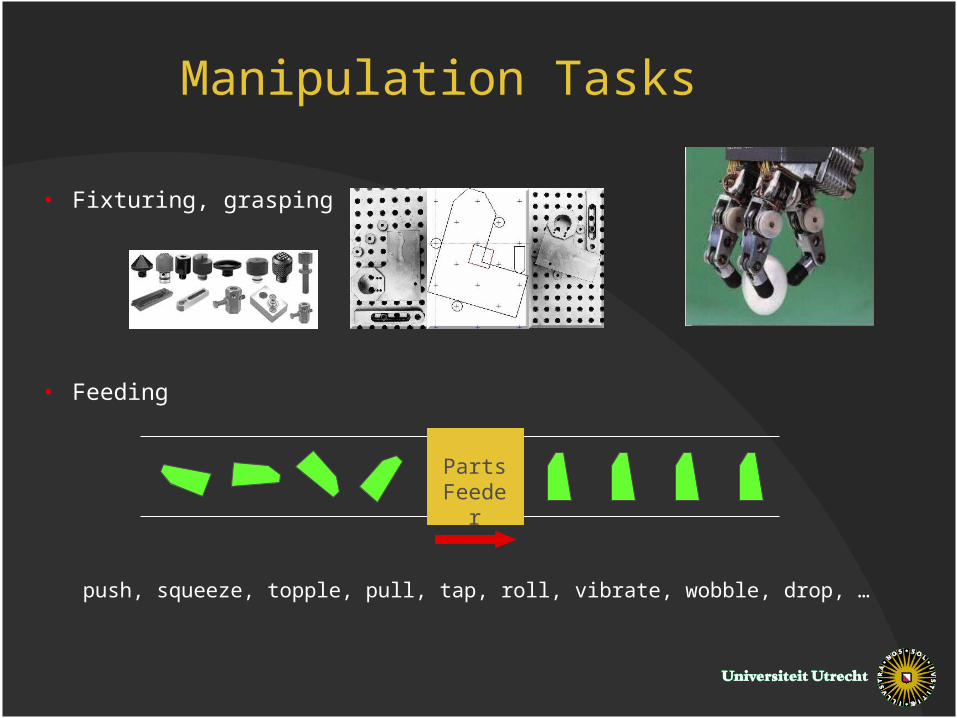
Manipulation Tasks
• Fixturing, grasping
• Feeding
push, squeeze, topple, pull, tap, roll, vibrate, wobble, drop, …
Parts Feede
r

Parallel-Jaw Grippers
• Every 2D part can be oriented by a sequence of push or squeeze actions.
• Shortest sequence is efficiently computable [Goldberg 93].

Feeding with ‘Fences’
• Every 2D part can be oriented by fences over conveyor
belt.
• Shortest fence design efficiently computable [Berretty, Goldberg, Overmars, vdS 98].

Feeding by Toppling
• Shortest sequence of pins and their heights efficiently computable [Zhang, Goldberg, Smith, Berretty, Overmars 01].
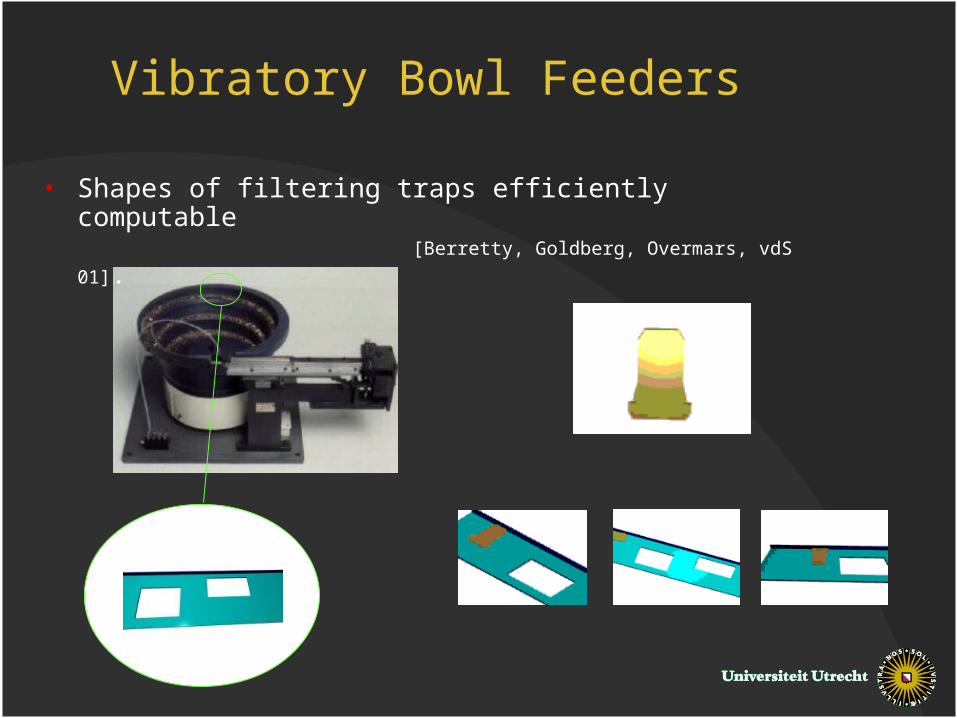
Vibratory Bowl Feeders
• Shapes of filtering traps efficiently computable [Berretty, Goldberg, Overmars, vdS 01].
Course Material
• Steven M. LaValle, Planning Algorithms, 2006, Chapters 3-7. Hardcopy approximately € 50-60. http://msl.cs.uiuc.edu/planning/index.html. Free!
• Robert J. Schilling, Fundamentals of Robotics: Analysis and Control, 1990, Chapters 1 and 2 (partly). Copies available.
• Matthew T. Mason, Mechanics of Robotic Manipulation, 2001. Price approximately € 50.

Teacher
Frank van der Stappenhttp://people.cs.uu.nl/frankst/
• Office: Buys Ballotlaboratorium 422 phone: 030 2535093; email: [email protected]
• Program leader for Game and Media Technology; MSc projects on grasping, manipulation, and path planning
Classes
• Wednesday 15:15-17:00 in BBL-079 MIN-208.
• Friday 11:00-12:45 usually in AARD-KLEIN, but in DDW-1.22 on September 23 and in RUPPERT-C MIN-208 on October 14.
• Written test:– first chance: Friday November 11, 13:30-15:30– second chance: Friday January 6, 13:30-15:30Dates are tentative, check website regularly!

Exam Form
• Written exam about the theory of motion and manipulation; weight 60%.
• Summary report (> 15 pages of text) in pairs on assigned collection of papers; weight 40%. Deadline: Wednesday November 2, 17:00.
• Additional requirments: – Need to score at least 5.0 for written exam to pass course. – Need to score at least 4.0 to be admitted to second chance