





Languages
Pages
Legal

8/8/2019 Midyear Pre
1/65
8/8/2019 Midyear Pre
2/65
Qazi Asif Saleh Energy & Environment
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
3/65
33
8/8/2019 Midyear Pre
4/65
Maze navigation robot
Fall 2008 & SpRING 2009
8/8/2019 Midyear Pre
5/65
IntroducingTeam member
Syed fakhar sajjad
Nyma haqqani
8/8/2019 Midyear Pre
6/65
8/8/2019 Midyear Pre
7/65
Our ApproachTry to learn the basics of circuits andprogramming
Take things one step at a time
Develop a very basic design and then improveupon it
To implement a top looking design using DC
motors and a wall hugging software codewhich will then be expanded into the mazeflooding algorithm.
8/8/2019 Midyear Pre
8/65
Possible Problems
May not have enough time
Schedule problems
Slow progression
8/8/2019 Midyear Pre
9/65
Learning
Expectations To successfully create a robot that will findthe center of a maze .
To gain hands on experience withimplementing theoretical design into aphysically working model.
To explore different approaches for designing
and logically determining the most efficient
solution.
8/8/2019 Midyear Pre
10/65
GoalsTo create a basic robot that can run through themaze
To gain more experience and knowledge in
dealing with circuits and programming To be able to make our robot move forward
To make our robot turn left/right
To create a program that maps the movement of the robot To have a working robot find the center of the maze
8/8/2019 Midyear Pre
11/65
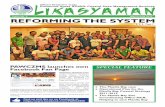
MICR
O
CON
TROLLE
SESNSORS
SENSORELECTRONI
CS
MOTOR
DRIVE
R
LEFTMOTO
R
RIGHT
MOTOR
Hardwareoverview
8/8/2019 Midyear Pre
12/65
Basic components ofRobot:Sensors
Motors
Microcontroller
Batteries
8/8/2019 Midyear Pre
13/65
SENSORS
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
14/65
SENSOR CIRCUIT
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
15/65
MOTORS
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
16/65
H-BRIDGE CIRCUIT
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
17/65
MICROCONTROLLER
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
18/65
MICROCONTROLLERCIRCUIT
Click to edit Master text stylesSecond level
Third level Fourth level
Fifth level
8/8/2019 Midyear Pre
19/65
CODE
#include
sbit L293D_A = P2^4;
sbit L293D_B = P2^3;
sbit L293D_E = P2^2;
sbit L293D_A1 = P2^7;sbit L293D_B1= P2^6;
sbit L293D_E1 = P2^5;
8/8/2019 Midyear Pre
20/65
//inputssbit sensorF = P1^0;
sbit sensorB = P1^1;sbit sensorR = P1^2;sbit sensorL = P1^3;// Function Prototypes
void rotate_f(void); //Forward run funtionvoid rotate_b(void); //Backward runfunctionvoid breaks(void); //Motor stop function
void delay(void); //Some delayvoid left_turn(void);void right_turn(void);void delay_turn(void);
8/8/2019 Midyear Pre
21/65
void main(){ //Our mainfunction
sensorF=1;
sensorB=1;sensorR=1;sensorL=1;
while(1){ //Infinite loop
if(sensorF==0)// & sensorB==1& sensorR==1 & sensorL==1)
{breaks();delay_turn();
rotate_f(); //Runforward
delay();breaks();
}
8/8/2019 Midyear Pre
22/65
else if(sensorB==0)//sensorF==1 & & sensorR==1& sensorL==1)
{breaks();delay_turn();rotate_b();delay();
breaks();}
else if(sensorR==0)//sensorF==1 & sensorB==1 && sensorL==1)
//delay();//Some delay
{breaks();
8/8/2019 Midyear Pre
23/65
else if(sensorL==0)//(sensorF==1 && sensorB==1&& sensorR==1 && sensorL==0)
{ breaks();delay_turn();left_turn();delay();breaks();
//Stop}
elsebreaks();
} //Do this infinitely}void left_turn(){L293D_E = 1; //BOTH MOTORS SHOULD BE
ENABLEDL293D_E1 = 1;
id i ht t (){
8/8/2019 Midyear Pre
24/65
void right_turn(){
L293D_E = 1; //BOTHMOTORS SHOULD BE
ENABLEDL293D_E1 = 1;L293D_A = 0;L293D_B = 1;L293D_A1 = 1;
L293D_B1 = 0;}void rotate_f(){
L293D_A = 1;
//Make positive of motor 1L293D_B = 0;//Make negative of motor 0
L293D_E = 1;//Enable L293D
L293D_A1 = 1;//Make ositive of motor 1
8/8/2019 Midyear Pre
25/65
void rotate_b(){
L293D_A = 0; //Make positive ofmotor 0
L293D_B = 1; //Make negative of
motor 1L293D_E = 1; //Enable L293DL293D_A1 = 0; //Make positive of
motor 0L293D_B1 = 1; //Make negative of
motor 1L293D_E1 = 1; //Enable L293D
}void breaks(){
L293D_A = 0; //Make positive of
8/8/2019 Midyear Pre
26/65
void delay(){ //Some delay...unsigned char i,j,k;
for(i=0;i
8/8/2019 Midyear Pre
27/65
SIMULATION OFSOFTWARE
8/8/2019 Midyear Pre
28/65
SoftwareoverviewSearch AlgorithmSimple Depth-First SearchRobot scans each cell for walls and constructsa DFS tree rooted at the START cellAs the DFS tree is constructed, it indicateswhich cells have been explored and provides
paths for backtrackingThe DFS halts when the GOAL cell is found
8/8/2019 Midyear Pre
29/65
Example 3x3 maze
GOAL
8/8/2019 Midyear Pre
30/65
We start out at (0,0) the southwest corner
of the mazeLocation of goal isunknown
8/8/2019 Midyear Pre
31/65
Check for a wall theway forward is blocked
8/8/2019 Midyear Pre
32/65
So we turn right
8/8/2019 Midyear Pre
33/65
Check for a wall nowall in front of us
8/8/2019 Midyear Pre
34/65
So we go forward; thered arrow indicatesthat (0,0) is (1,0)spredecessor.
8/8/2019 Midyear Pre
35/65
Turn right
8/8/2019 Midyear Pre
36/65
We sense a wall heretoo, so were gonnahave to look north.
8/8/2019 Midyear Pre
37/65
Turn left
8/8/2019 Midyear Pre
38/65
8/8/2019 Midyear Pre
39/65
The way forward isclear
8/8/2019 Midyear Pre
40/65
We sense a wall cantgo forward
8/8/2019 Midyear Pre
41/65
so well turn right.
8/8/2019 Midyear Pre
42/65
This way is clear
8/8/2019 Midyear Pre
43/65
so we go forward.
8/8/2019 Midyear Pre
44/65
8/8/2019 Midyear Pre
45/65
How about this way?
8/8/2019 Midyear Pre
46/65
Clear!
8/8/2019 Midyear Pre
47/65
8/8/2019 Midyear Pre
48/65
We already know thatthe wall on the right isblocked, so we tryturning left instead.
8/8/2019 Midyear Pre
49/65
Whoops, wall here.
8/8/2019 Midyear Pre
50/65
Wall here too!
Now there are nounexplored
neighboring squaresthat we can get to.
So, we backtrack!(Retrace the red
arrow)
8/8/2019 Midyear Pre
51/65
We turn to face the redarrow
8/8/2019 Midyear Pre
52/65
and go forward.
Now wevebacktracked to a
square that mighthave an unexploredneighbor. Lets check!
8/8/2019 Midyear Pre
53/65
Ah-ha!
8/8/2019 Midyear Pre
54/65
Onward!
8/8/2019 Midyear Pre
55/65
Drat!
8/8/2019 Midyear Pre
56/65
Theres gotta be a wayout of here
8/8/2019 Midyear Pre
57/65
Not this way!
8/8/2019 Midyear Pre
58/65
Two 90-degree turns toface west
8/8/2019 Midyear Pre
59/65
8/8/2019 Midyear Pre
60/65
No wall here!
8/8/2019 Midyear Pre
61/65
8/8/2019 Midyear Pre
62/65
What luck! Heres thegoal.
Final step: Execute
victory dance.
8/8/2019 Midyear Pre
63/65
8/8/2019 Midyear Pre
64/65
Questions!
?????
8/8/2019 Midyear Pre
65/65
Thank you