





Languages
Pages
Legal


241
Arm
type
Gantry type
Moving arm
type
Po
le type
Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
NX
Z type
Lin
ea
r convey o
r m
od
ule
s
LCM
100
CONTENTS
Main functions P.36
XY-XSERIES
CARTESIAN ROBOTS
■ Arm & cable variations ······· 242■ 2-axis spec selection guide ··· 244■ 3-axis spec selection guide ··· 246
■ Robot ordering method description ··························· 250 ■ Robot ordering method terminology ·························· 251
ARM TYPEPXYx 2 axes C ���������������������������������������252FXYx 2 axes C ���������������������������������������254FXYx 2 axes / IO C ��������������������������������256FXYx 3 axes / ZS C ��������������������������������257FXYx 3 axes / ZT6L C ����������������������������258FXYBx 2 axes C �������������������������������������260FXYBx 2 axes S �������������������������������������262FXYBx 2 axes / IO C ������������������������������264SXYx 2 axes C ���������������������������������������266SXYx 2 axes S ���������������������������������������268SXYx 2 axes / IO C ��������������������������������270SXYx 3 axes / ZF C ��������������������������������272SXYx 3 axes / ZF S ��������������������������������273SXYx 3 axes / ZFL20 �����������������������������274SXYx 3 axes / ZFH C �����������������������������275SXYx 3 axes / ZS C ��������������������������������276SXYx 3 axes / ZS S ��������������������������������277SXYx 4 axes / ZRF C �����������������������������278SXYx 4 axes / ZRF S �����������������������������279SXYx 4 axes / ZRFL20 C �����������������������280SXYx 4 axes / ZRFH C���������������������������281SXYx 4 axes / ZRS C �����������������������������282SXYx 4 axes / ZRS S �����������������������������283SXYBx 2 axes C �������������������������������������284SXYBx 3 axes / ZF C �����������������������������286SXYBx 3 axes / ZFL20 C �����������������������287
SXYBx 3 axes / ZFH C ���������������������������288SXYBx 3 axes / ZS C �����������������������������289SXYBx 4 axes / ZRS C ��������������������������290NXY 2 axes C �����������������������������������������292NXY 3 axes / ZFL C �������������������������������294NXY 3 axes / ZFH C �������������������������������296NXY-W 4 axes C ������������������������������������298NXY-W 6 axes / ZFL C ���������������������������299NXY-W 6 axes / ZFH C ��������������������������300MXYx 2 axes C���������������������������������������302MXYx 2 axes S ���������������������������������������304MXYx 2 axes / IO C ��������������������������������306MXYx 3 axes / ZFL20/10 C ��������������������307MXYx 3 axes / ZFH C ����������������������������308MXYx 4 axes / ZRFL20/10 C �����������������309MXYx 4 axes / ZRFH C ��������������������������310HXYx 2 axes C ��������������������������������������� 312HXYx 3 axes / ZL C ��������������������������������314HXYx 3 axes / ZH C �������������������������������315HXYx 4 axes / ZRL C �����������������������������316HXYx 4 axes / ZRH C ���������������������������� 317HXYLx 2 axes C �������������������������������������318
GANTRY TYPEMXYx 2 axes C���������������������������������������320MXYx 2 axes / IO C ��������������������������������322MXYx 3 axes / ZFL20/10 C ��������������������323MXYx 3 axes / ZFH C ����������������������������324MXYx 4 axes / ZRFL20/10 C �����������������325MXYx 4 axes / ZRFH C ��������������������������326HXYx 2 axes C ���������������������������������������328HXYx 3 axes / ZL C ��������������������������������330HXYx 3 axes / ZH C �������������������������������331HXYx 4 axes / ZRL C �����������������������������332HXYx 4 axes / ZRH C ����������������������������333HXYLx 2 axes C �������������������������������������334
MOVING ARM TYPESXYx 2 axes S ���������������������������������������336SXYx 3 axes / ZF S ��������������������������������338SXYx 3 axes / ZFL20 S ��������������������������339SXYx 3 axes / ZFH S �����������������������������340SXYx 3 axes / ZS S ��������������������������������341MXYx 2 axes C���������������������������������������342MXYx 3 axes / ZFL20/10 C ��������������������344MXYx 3 axes / ZFH C ����������������������������345HXYx 2 axes C ���������������������������������������346HXYx 3 axes / ZH C �������������������������������348
POLE TYPESXYx 2 axes S ���������������������������������������350MXYx 2 axes C���������������������������������������351MXYx 2 axes S ���������������������������������������352MXYx 3 axes / ZPMH C �������������������������353HXYx 2 axes C ���������������������������������������354HXYx 2 axes S ���������������������������������������355HXYx 3 axes / ZPH C �����������������������������356HXYx 3 axes / ZPH S �����������������������������357
XZ TYPESXYx 2 axes / ZF C ��������������������������������358SXYx 2 axes / ZF S ��������������������������������359SXYx 2 axes / ZFL20 C ��������������������������360SXYx 2 axes / ZS C ��������������������������������361SXYx 2 axes / ZF C ��������������������������������362SXYBx 2 axes / ZFL20 C �����������������������363MXYx 2 axes / ZFL10 C �������������������������364MXYx 2 axes / ZFH C ����������������������������365HXYx 2 axes / ZL C ��������������������������������366HXYx 2 axes / ZH C �������������������������������367

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
242
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
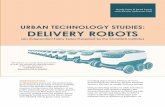
Arm & cable variations
Cable variationsTwo cable types are available; cable carrier type and whipover type. (except PXYX) The cable carrier type is supplied with a user cable as standard so that cable can be added easily. The whipover type is supplied with a user cable and tube as standard set. A cable duct specially designed for clean rooms is also available. (See P.458 to P.463 for detailed information on Clean Cartesian robots.)
Arm variations The first step for selection of Cartesian type robot models is to check for applicable models according to specific use and operation area.
Cable carrier (C)
When adding cables to a cable carrier track, keep the cable occupation rate at 30% or less.
Note. User cable 10 cores, 0.2 sq.
Whipover (S)
Adding a load on whipover will result in sagging and cut. Sagging may also occur when using long strokes.
Note. User cable: 7 cores, 0.2 sq.Note. User tube: 2 ϕ4 air tubes.
Arm type
Gantry type
Moving arm type
Pole type
XZ type
Clean type
The type with moving Y-axis carriage.
The type with a guide railing at the end of Y-axis for support.
The type with a moving Y-axis arm.
The type with vertically moving Y-axis carriage.
The type with combination of X-axis for horizontal movement and Z-axis for vertical movement.
Special model for clean rooms with moving Y-axis carriage installed upward.
P.252
P.320
P.336
P.350
P.358
P.458

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
243
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Arm & cable variations
Arm variations The first step for selection of Cartesian type robot models is to check for applicable models according to specific use and operation area.
A1 A3 A4
M M
A2
M M MMM
M
G1 G3 G4
MM M
M
G2
MM
MM
M1 M3
M
M
M
M
P1 P2M
M
M
M
F1 F3M
M
M
M
T1 T3
M
M
M
M

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
244
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
1 Select the arm variation
2 Select a line satisfying both the Y-axis stroke and payload and move to the right.
3 Check the cable types
4 Check the X axis stroke
5 Select the desired speed
6 Decide the model
Arm typeThe type with moving Y-axis carriage.
Gantry typeThe type with a guide railing at the end of Y-axis for support.
Moving arm typeThe type with a moving Y-axis arm.
Pole typeThe type with vertically moving Y-axis carriage.
XZ typeThe type with combination of X-axis for horizontal movement and Z-axis for vertical movement.
Setting method
While checking conditions in
order starting from , proceed
to the right. Select the desired
model in .
2-axis spec selection guide
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
Model (Note 1) Detailed info page50 100 150 200 250 300 350 400 450 500
Payload (kg) 4.5 4.5 3.5 2.5 2 1.5 Cable carrier 150 to 650 720 / 720 PXYx-C-A* P.252
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
12 11 9 7 Cable carrier 150 to 1050 1200 / 800 FXYx-C-A* P.25412 11 9 7 Cable carrier 150 to 1050 1200 / 800 FXYx-C-A* (I/O) P.256
7 6 5 3 Cable carrier 150 to 2450 1875 / 1875 FXYBx-C-A* P.2607 6 5 3 Whipover 150 to 950 1875 / 1875 FXYBx-S-A* P.2627 6 5 3 Cable carrier 150 to 2450 1875 / 1875 FXYBx-C-A* (I/O) P.264
20 17 15 13 11 9 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A* P.26620 17 15 13 11 9 Whipover 150 to 850 1200 / 1200 SXYx-S-A* P.26819 16 14 12 10 8 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A* (I/O) P.27014 12 10 8 7 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A* P.28425 21 18 16 13 11 Cable carrier 500 to 2000 1200 / 1200 NXY-C-A* P.292
30 25 20 16 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A* P.30230 25 20 16 Whipover 250 to 850 1200 / 1200 MXYx-S-A* P.30429 24 19 15 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A* (I/O) P.306
40 35 30 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A* P.31240 35 30 Cable carrier 1150 to 2050 1200 / 1200 HXYLx-C-A* P.318
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
30 25 20 Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G* P.32029 24 19 Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G* (I/O) P.322
50 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G* P.32850 Cable carrier 1150 to 2050 1200 / 1200 HXYLx-C-G* P.334
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
15 14 13 Cable carrier 150 to 850 1200 / 1200 SXYx-C-M* P.33620 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M* P.342
30 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-M* P.348
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g) 8 Whipover 150 to 850 1200 / 600 SXYx-S-P* P.35020 Cable carrier 250 to 1250 1200 / 600 MXYx-C-P* P.35120 Whipover 250 to 950 1200 / 600 MXYx-S-P* P.352
30 Cable carrier 250 to 1250 1200 / 600 HXYx-C-P* P.35430 Whipover 250 to 850 1200 / 600 HXYx-S-P* P.355
Z-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
10 Cable carrier 150 to 1050 1200 / 600 SXYx-C-F* (ZF) P.35810 Whipover 150 to 850 1200 / 600 SXYx-S-F* (ZF) P.3598 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-F* (ZFL20) P.360
3 Cable carrier 150 to 1050 1200 / 1000 SXYx-C-F* (ZS12) P.3615 Cable carrier 150 to 1050 1200 / 500 SXYx-C-F* (ZS6) P.361
10 Cable carrier 150 to 3050 1875 / 600 SXYBx-C-F* (ZF) P.3628 Cable carrier 150 to 3050 1875 / 1200 SXYBx-C-F* (ZFL20) P.36315 Cable carrier 150 to 1050 1200 / 600 MXYx-C-F* (ZFL10) P.364
14 13 12 Cable carrier 150 to 1050 1200 / 600 MXYx-C-F* (ZFH) P.36520 Cable carrier 250 to 1250 1200 / 600 HXYx-C-F* (ZL) P.36630 Cable carrier 250 to 1250 1200 / 300 HXYx-C-F* (ZH) P.367
Arm type
Gantry type
Moving arm type
Pole type
XZ type
Decide the model

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
245
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
2-axis spec selection guide
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
Model (Note 1) Detailed info page50 100 150 200 250 300 350 400 450 500
Payload (kg) 4.5 4.5 3.5 2.5 2 1.5 Cable carrier 150 to 650 720 / 720 PXYx-C-A* P.252
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
12 11 9 7 Cable carrier 150 to 1050 1200 / 800 FXYx-C-A* P.25412 11 9 7 Cable carrier 150 to 1050 1200 / 800 FXYx-C-A* (I/O) P.256
7 6 5 3 Cable carrier 150 to 2450 1875 / 1875 FXYBx-C-A* P.2607 6 5 3 Whipover 150 to 950 1875 / 1875 FXYBx-S-A* P.2627 6 5 3 Cable carrier 150 to 2450 1875 / 1875 FXYBx-C-A* (I/O) P.264
20 17 15 13 11 9 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A* P.26620 17 15 13 11 9 Whipover 150 to 850 1200 / 1200 SXYx-S-A* P.26819 16 14 12 10 8 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A* (I/O) P.27014 12 10 8 7 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A* P.28425 21 18 16 13 11 Cable carrier 500 to 2000 1200 / 1200 NXY-C-A* P.292
30 25 20 16 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A* P.30230 25 20 16 Whipover 250 to 850 1200 / 1200 MXYx-S-A* P.30429 24 19 15 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A* (I/O) P.306
40 35 30 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A* P.31240 35 30 Cable carrier 1150 to 2050 1200 / 1200 HXYLx-C-A* P.318
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
30 25 20 Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G* P.32029 24 19 Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G* (I/O) P.322
50 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G* P.32850 Cable carrier 1150 to 2050 1200 / 1200 HXYLx-C-G* P.334
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
15 14 13 Cable carrier 150 to 850 1200 / 1200 SXYx-C-M* P.33620 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M* P.342
30 Cable carrier 250 to 1250 1200 / 1200 HXYx-C-M* P.348
Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g) 8 Whipover 150 to 850 1200 / 600 SXYx-S-P* P.35020 Cable carrier 250 to 1250 1200 / 600 MXYx-C-P* P.35120 Whipover 250 to 950 1200 / 600 MXYx-S-P* P.352
30 Cable carrier 250 to 1250 1200 / 600 HXYx-C-P* P.35430 Whipover 250 to 850 1200 / 600 HXYx-S-P* P.355
Z-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis) (mm/sec)
ModelDetailed info
page150 250 350 450 550 650 750 850 950 1050
Pay
loa
d (k
g)
10 Cable carrier 150 to 1050 1200 / 600 SXYx-C-F* (ZF) P.35810 Whipover 150 to 850 1200 / 600 SXYx-S-F* (ZF) P.3598 Cable carrier 150 to 1050 1200 / 1200 SXYx-C-F* (ZFL20) P.360
3 Cable carrier 150 to 1050 1200 / 1000 SXYx-C-F* (ZS12) P.3615 Cable carrier 150 to 1050 1200 / 500 SXYx-C-F* (ZS6) P.361
10 Cable carrier 150 to 3050 1875 / 600 SXYBx-C-F* (ZF) P.3628 Cable carrier 150 to 3050 1875 / 1200 SXYBx-C-F* (ZFL20) P.36315 Cable carrier 150 to 1050 1200 / 600 MXYx-C-F* (ZFL10) P.364
14 13 12 Cable carrier 150 to 1050 1200 / 600 MXYx-C-F* (ZFH) P.36520 Cable carrier 250 to 1250 1200 / 600 HXYx-C-F* (ZL) P.36630 Cable carrier 250 to 1250 1200 / 300 HXYx-C-F* (ZH) P.367
Decide the model
Note 1. The figure entered at * inside the form, expresses the arm variation. See P. 242 for more information.

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
246
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
1 Select the arm variation
Arm type Moving arm type
The type with moving Y-axis carriage. The type with a moving Y-axis arm.
Gantry type Pole type
The type with a guide railing at the end of Y-axis for support.
The type with ver t ical ly moving Y-axis carriage.
While checking conditions in
order starting from , proceed
to the right. Select the desired
model in .
Setting method
3-axis spec selection guide
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
1000 150Shaft vertical type
Pay
loa
d (k
g)
3
Cable carrier 150 to 1050 1200 / 800
FXYx-C-A*-ZS12 P.257500 150 5 3 FXYx-C-A*-ZS6 P.257
800 50 to 300Clamped base � moving
table type (60W)3 FXYx-C-A*-ZT6L P.258
600
150 Clamped base � moving table type
(100W)
10 9 7 5 3Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZF P.272250 10 8 6 4 2
350 10 9 7 5 3 1150 Clamped base �
moving table type (100W)
10 9 7 5 3Whipover 150 to 850 1200 / 1200 SXYx-S-A*-ZF P.273250 10 10 8 6 4 2
350 10 9 7 5 3 1
1200150 Clamped base �
moving table type (200W)
8 6 4 2Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZFL20 P.274250 8 7 5 3 1
350 8 6 4 2 1
600150 Clamped table �
moving base type (200W)
13 10 8 6 4 2Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZFH P.275250 12 9 7 5 3 1
350 11 8 6 4 2 1
1000 150Shaft vertical type
3 Cable carrier 150 to 1050
1200 / 1200
SXYx-C-A*-ZS12 P.2763 Whipover 150 to 850 SXYx-S-A*-ZS12 P.276
500 1505 Cable carrier 150 to 1050 SXYx-C-A*-ZS6 P.2775 Whipover 150 to 850 SXYx-S-A*-ZS6 P.277
600150 Clamped base �
moving table type (100W)
8 6 4 2 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZF P.286250 7 5 3 1
350 6 4 2
1200150 Clamped base �
moving table type (200W)
7 5 3 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZFL20 P.287250 6 4 2
350 5 3 1
600150 Clamped table �
moving base type (200W)
7 5 3 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZFH P.288250 6 4 2
350 5 3 11000 150
Shaft vertical type3 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZS12 P.289
500 150 5 4 3 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZS6 P.289
1200150 Clamped base �
moving table type (200W)
8 5 3Cable carrier 500 to 2000 1200 / 1200 NXY-C-A*-ZFL20 P.294250 8 7 4 2
350 8 6 3 1
600150 Clamped table �
moving base type (200W)
13 12 10 8 5 3Cable carrier 500 to 2000 1200 / 1200 NXY-C-A*-ZFH P.296250 13 11 9 7 4 2
350 12 10 8 6 3 1
600150 Clamped base �
moving table type (200W)
15 12 12 8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFL10 P.307250 15 11 11 7
350 15 10 10 6
1200150 Clamped base �
moving table type (200W)
8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFL20 P.307250 8 7
350 8 6
600150 Clamped table �
moving base type (200W)
14 12 8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFH P.308250 13 11 7
350 12 10 6
600
250Clamped base �
moving table type (200W)
20 18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A*-ZL P.314350 20 17450 20 19 16550 20 18 15
300
250Clamped table �
moving base type (200W)
25 20 18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A*-ZH P.315350 25 20 17450 24 19 16550 23 18 15
Arm type
Decide the model

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
247
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Setting method
3-axis spec selection guide
3Select a line satisfying both the Y-axis stroke and payload and move to the right.
5 Check the X axis stroke 7 Decide the model
2 Check the Z-axis speed, stroke, and installation method
4 Check the cable types
6Check the maximum speed on X-axis and Y-axis
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
1000 150Shaft vertical type
Pay
loa
d (k
g)
3
Cable carrier 150 to 1050 1200 / 800
FXYx-C-A*-ZS12 P.257500 150 5 3 FXYx-C-A*-ZS6 P.257
800 50 to 300Clamped base � moving
table type (60W)3 FXYx-C-A*-ZT6L P.258
600
150 Clamped base � moving table type
(100W)
10 9 7 5 3Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZF P.272250 10 8 6 4 2
350 10 9 7 5 3 1150 Clamped base �
moving table type (100W)
10 9 7 5 3Whipover 150 to 850 1200 / 1200 SXYx-S-A*-ZF P.273250 10 10 8 6 4 2
350 10 9 7 5 3 1
1200150 Clamped base �
moving table type (200W)
8 6 4 2Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZFL20 P.274250 8 7 5 3 1
350 8 6 4 2 1
600150 Clamped table �
moving base type (200W)
13 10 8 6 4 2Cable carrier 150 to 1050 1200 / 1200 SXYx-C-A*-ZFH P.275250 12 9 7 5 3 1
350 11 8 6 4 2 1
1000 150Shaft vertical type
3 Cable carrier 150 to 1050
1200 / 1200
SXYx-C-A*-ZS12 P.2763 Whipover 150 to 850 SXYx-S-A*-ZS12 P.276
500 1505 Cable carrier 150 to 1050 SXYx-C-A*-ZS6 P.2775 Whipover 150 to 850 SXYx-S-A*-ZS6 P.277
600150 Clamped base �
moving table type (100W)
8 6 4 2 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZF P.286250 7 5 3 1
350 6 4 2
1200150 Clamped base �
moving table type (200W)
7 5 3 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZFL20 P.287250 6 4 2
350 5 3 1
600150 Clamped table �
moving base type (200W)
7 5 3 1Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZFH P.288250 6 4 2
350 5 3 11000 150
Shaft vertical type3 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZS12 P.289
500 150 5 4 3 Cable carrier 150 to 3050 1875 / 1875 SXYBx-C-A*-ZS6 P.289
1200150 Clamped base �
moving table type (200W)
8 5 3Cable carrier 500 to 2000 1200 / 1200 NXY-C-A*-ZFL20 P.294250 8 7 4 2
350 8 6 3 1
600150 Clamped table �
moving base type (200W)
13 12 10 8 5 3Cable carrier 500 to 2000 1200 / 1200 NXY-C-A*-ZFH P.296250 13 11 9 7 4 2
350 12 10 8 6 3 1
600150 Clamped base �
moving table type (200W)
15 12 12 8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFL10 P.307250 15 11 11 7
350 15 10 10 6
1200150 Clamped base �
moving table type (200W)
8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFL20 P.307250 8 7
350 8 6
600150 Clamped table �
moving base type (200W)
14 12 8Cable carrier 250 to 1250 1200 / 1200 MXYx-C-A*-ZFH P.308250 13 11 7
350 12 10 6
600
250Clamped base �
moving table type (200W)
20 18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A*-ZL P.314350 20 17450 20 19 16550 20 18 15
300
250Clamped table �
moving base type (200W)
25 20 18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-A*-ZH P.315350 25 20 17450 24 19 16550 23 18 15
Decide the model
Note 1. The figure entered at * inside the form, expresses the arm variation. See P.242 for more information.

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
248
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
3-axis spec selection guide
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
600150 Clamped base �
moving table type (200W)
Pay
loa
d (k
g)
15 12Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFL10 P.323250 15 11
350 15 10
1200150 Clamped base �
moving table type (200W)
8Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFL20 P.323250 8
350 8
600150 Clamped table �
moving base type (200W)
14 12Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFH P.324250 13 11
350 12 10
600
250Clamped base �
moving table type (200W)
20
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G*-ZL P.330350 20450 20550 20
300
250Clamped table �
moving base type (200W)
30
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G*-ZH P.331350 30450 30550 30
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
600150 Clamped base �
moving table type (100W)
Pay
loa
d (k
g)
9 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZF P.338250 8 7 6
350 7 6 5
1200150 Clamped base �
moving table type (200W)
8 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZFL20 P.339250 8 7 6
350 7 6 5
600150 Clamped table �
moving base type (200W)
9 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZFH P.340250 8 7 6
350 7 6 51000 150
Shaft vertical type3 Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZS12 P.341
500 150 5 Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZS6 P.341
600150 Clamped base �
moving table type (200W)
12Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFL10 P.344250 11
350 10
1200150 Clamped base �
moving table type (200W)
8 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFL20 P.344250350
600150 Clamped table �
moving base type (200W)
12Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFH P.345250 11
350 10
300
250Clamped table �
moving base type (200W)
18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-M*-ZH P.348350 18 17450 18 16550 18 15
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model
Detailed info pageSpeed
(mm/sec)Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
1200150 Clamped table �
moving base type (200W)
Pay
loa
d (k
g)
10Cable carrier 250 to 1250 1200 / 600 MXYX-C-P2-ZPMH P.353250 9
350 8
1200
250
Clamped table � moving base type
(200W)
15
Cable carrier 250 to 1250 1200 / 600 HXYx-C-P2-ZPH P.356350 15450 15550 15650 15
1200
250
Clamped table � moving base type
(200W)
15
Whipover 250 to 850 1200 / 600 HXYx-S-P1-ZPH P.357350 15450 15550 15650 15
Gantry type
Moving arm type
Pole type
Decide the model

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
249
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type3-axis spec selection guide
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
600150 Clamped base �
moving table type (200W)
Pay
loa
d (k
g)
15 12Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFL10 P.323250 15 11
350 15 10
1200150 Clamped base �
moving table type (200W)
8Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFL20 P.323250 8
350 8
600150 Clamped table �
moving base type (200W)
14 12Cable carrier 250 to 1050 1200 / 1200 MXYx-C-G*-ZFH P.324250 13 11
350 12 10
600
250Clamped base �
moving table type (200W)
20
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G*-ZL P.330350 20450 20550 20
300
250Clamped table �
moving base type (200W)
30
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-G*-ZH P.331350 30450 30550 30
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model (Note 1) Detailed info
pageSpeed(mm/sec)
Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
600150 Clamped base �
moving table type (100W)
Pay
loa
d (k
g)
9 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZF P.338250 8 7 6
350 7 6 5
1200150 Clamped base �
moving table type (200W)
8 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZFL20 P.339250 8 7 6
350 7 6 5
600150 Clamped table �
moving base type (200W)
9 8 7Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZFH P.340250 8 7 6
350 7 6 51000 150
Shaft vertical type3 Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZS12 P.341
500 150 5 Whipover 150 to 850 1200 / 1200 SXYx-S-M*-ZS6 P.341
600150 Clamped base �
moving table type (200W)
12Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFL10 P.344250 11
350 10
1200150 Clamped base �
moving table type (200W)
8 Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFL20 P.344250350
600150 Clamped table �
moving base type (200W)
12Cable carrier 250 to 1250 1200 / 1200 MXYx-C-M*-ZFH P.345250 11
350 10
300
250Clamped table �
moving base type (200W)
18
Cable carrier 250 to 1250 1200 / 1200 HXYx-C-M*-ZH P.348350 18 17450 18 16550 18 15
Z-axis Y-axis stroke (mm)Cable type X-axis stroke (mm)
Maximum speed(X-axis / Y-axis)
(mm/sec)Model
Detailed info pageSpeed
(mm/sec)Stroke(mm)
Installation method 150 250 350 450 550 650 750 850 950 1050
1200150 Clamped table �
moving base type (200W)
Pay
loa
d (k
g)
10Cable carrier 250 to 1250 1200 / 600 MXYX-C-P2-ZPMH P.353250 9
350 8
1200
250
Clamped table � moving base type
(200W)
15
Cable carrier 250 to 1250 1200 / 600 HXYx-C-P2-ZPH P.356350 15450 15550 15650 15
1200
250
Clamped table � moving base type
(200W)
15
Whipover 250 to 850 1200 / 600 HXYx-S-P1-ZPH P.357350 15450 15550 15650 15
Decide the model
Note 1. The figure entered at * inside the form, expresses the arm variation. See P.242 for more information.

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
250
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Robot ordering method description
In the order format for the YAMAHA cartesian robots XY-X series, the notation (letters/numbers) for the mechanical section is shown linked to the controller section notation.
[Example] 2-axis specifications
Mechanical FXYx (Arm type)
• Cable variations Cable carrier• Combination (Arm variations) A1
• X-axis stroke 450mm• Y-axis stroke 350mm• Robot cable length 3.5M
Controller RCX222
Mechanical SXYx (Moving arm type) Controller RCX240S• Cable variations Whipover• Combination (Arm variations) M3• X-axis stroke 850mm
• Y-axis stroke 150mm• Z-axis stroke 150mm• Robot cable length 5M
Ordering method
A1 45 3L RCX222C 35FXYxMechanical section Controller section
Ordering method
M3 85 ZFH RCX240SS 15 15 5LSXYxMechanical section Controller section
To find detailed controller information see the controller page. RCX222 P.526
To find detailed controller information see the controller page. RCX240 P.534 , RCX340 P.544
A1 to 4
G1 to 4
M1 / M3
P1 / P2
F1 / F3
Arm type
Gantry type
Moving arm type
Pole type
XZ type
C
S
Cable carrier
Whipover3L
5L
10L
3.5m
5m
10m
PXYx
FXYx
FXYBx
SXYx
SXYBx
NXY
MXYx
HXYx
HXYLx
RCX222
Cable Model Cable X-axis stroke Y-axis stroke Combination Note 1 Controller
Note 1. To find detailed information on arm variations (combinations) see P.242.
[Example] 3 / 4-axis specifications
RCX240
RCX240S
RCX340
A1 to 4
G1 to 4
M1/3
P1 to 2
Arm type
Gantry type
Moving arm type
Pole type
ZS
ZT
ZF
ZFL/ZL
ZFH/ZH
ZPMH/ZPH
ZRF
ZRS
ZRFL/ZRL
ZRFH/ZRH
Shaft vertical type
Clamped base •
moving table type (60W)
Clamped base •
moving table type (100W)
Clamped base •
moving table type (200W)
Clamped table •
moving base type (200W)
Clamped table • moving base
type (200W) for Pole type
Clamped base •
moving table type (100W)+R-axis
Shaft vertical type ZR-axis
integrated type
Clamped base •
moving table type (200W)+R-axis
Clamped table •
moving base type (200W)+R-axis
C
S
Cable carrier
Whipover
3L
5L
10L
3.5m
5m
10m
Model
FXYx
SXYx
SXYBx
NXY
MXYx
HXYx
Cable X-axis stroke ZR-axis ControllerY-axis stroke Z-axis stroke CableCombination

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
251
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Robot ordering method terminology
Model Enter the robot unit model.
CableCable specs can be selected. To find detailed information see P.242.C: Cable carrierS: Whipover
Combination (Arm variations)
Select the arm variation and combination method.
Arm typeThe type with moving Y-axis carriage.
Gantry typeThe type with a guide railing at the end of Y-axis for support.
Moving arm typeThe type with a moving Y-axis arm.
Pole typeThe type with vertically moving Y-axis carriage.
XZ typeThe type with combination of X-axis for horizontal movement and Z-axis for vertical movement.
Clean typeSpecial model for clean rooms with moving Y-axis carriage installed upward.
To find information on combinations see P.242.
X-axis stroke Select the X axis stroke. Enter in centimeters (cm). (For example enter 50 for a stroke of 500mm.)
Y-axis stroke Select the Y axis stroke. Enter in centimeters (cm). (For example enter 50 for a stroke of 500mm.)
ZR-axis
Select the Z axis installation direction. The R axis is installed with 4-axis specifications. To find more information see P.39.
[3-axes]ZS : Shaft vertical typeZT : Clamped base � moving table type (60W)ZF : Clamped base � moving table type (100W)ZFL/ZL : Clamped base � moving table type (200W)ZFH/ZH : Clamped table � moving base type (200W)ZPMH/ZPH : Clamped table � moving base type (200W) for pole type
[4-axes]ZRF : Clamped base � moving table type (100W)+R axisZRS : ZR axis integrated typeZRL/ZRFL : Clamped base � moving table type (200W)+R axisZRH/ZRFH : Clamped table � moving base type (200W)+R axis
Z-axis strokeSelect the Z axis stroke. Enter in centimeters (cm). (For example enter 15 for a stroke of 150mm.)
CableSelect the length of the robot cable connecting the robot and controller.3L : 3.5m 5L : 5m 10L : 10m
Controller2-axis specifications: Select the RCX222.3 / 4-axis specifications: Select either the RCX240 (RCX240S) or RCX340.

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
252
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
PXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
50 4.5
100 4.5
150 3.5
200 2.5
250 2
300 1.5
X-axis Y-axis
Axis construction Note 1 – T4H
AC servo motor output (W) 60 30
Repeatability Note 2 (mm) +/-0.02 +/-0.02
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 12 12
Maximum speed Note 4 (mm/sec) 720 720
Moving range (mm) 150 to 650 50 to 300
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 650mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In thiscase, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
PXYx C RCX222Model Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 65cm 5 to 30cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. EN: Ethernet EN: Ethernet Note 3
Note 2. Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
PXYx 2 axes A1
68.5
39.5
X stroke + 183L (X stroke + 254.5)
Approx. 250 (Motor cable length)50 or more
105
64.5
65Y
stro
ke80
+/-3
6
Note 1
6
6
54.5 45
185+/-3 X stroke
160
73
Y st
roke
+ 1
98
53
6
B
B-B (installation holes in detail) B
62
M x 40
(42)
9.5
(144
)
N-ϕ
8 4.5
23
57.5
53
128.5
56.5
Detail of section A Cross-section ofcable carrier
2-ϕ3H7 Depth6
(43)
35
(90)
4-M4 x 0.7 Depth9
30 (B
etw
een
knoc
ks +
/-0.0
2 )
4456
90
55.5
63
(67.
5)45
A
Use M4 x 0.7 hex socket head bolt with length head bolt with length (under head) of 15mm or more.
62
2519
50
ϕ7.6ϕ8.2
N-ϕ4.5 through (B-B)
20+/-0.02
Arm type Cable carrier
X stroke 150 250 350 450 550 650 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
L 404.5 504.5 604.5 704.5 804.5 904.5
M 5 8 10 13 15 18
N 12 18 22 28 32 38
Y stroke 50 100 150 200 250 300
Maximum speed for each stroke (mm/sec) Note 2
X-axis 720 600 Note 2. When the X-axis stroke is longer than 650mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.Speed setting – 83%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
253
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
PXYx
PXYx 2 axes A2
(43)
35(90)
4-M4 x 0.7 Depth 9
30 (B
etw
een
knoc
ks +
/-0.0
2 )
B-B (installation holes in detail)
44 56 90
55.5
63
(67.
5)45
A
68.5 X stroke + 183L (X stroke + 254.5) (80)
53
39.5
Approx. 250 (Motor cable length) 50 or more
105
Y st
roke
122+/-3
80+/
-3
Note 1
6 654.545
64.5
X stroke
160
73
Y st
roke
+ 1
98
65
66
57.5
(144
)
6256.5
B
B
M x 4040
53
128.5
23
20+/-0.022-ϕ3H7 Depth 6
Detail of section A
Cross-section of cable carrier
62
2519
50
ϕ7.6ϕ8.2
(42)
9.54.5
Use M4 x 0.7 hex socket head bolt with length head bolt with length (under head) of 15mm or more.
N-ϕ
8N-ϕ4.5 through (B-B)
PXYx 2 axes A4
39.5Approx. 250 (Motor cable length)50 or more
105
65
Y st
roke
122+/-3
80+/
-3
6
Note 1
66
6
54.5 45
64.5
X stroke
160
73
Y st
roke
+ 1
98
68.5(80)
53
57.5
(144
)62 56
.5
53
B
B
M x 4040
128.5
23
B-B (installation holes in detail)
445690
55.5
63
(67.
5)45
A
(43)
35(90)
4-M4 x 0.7 Depth 9
30 (B
etw
een
knoc
ks +
/-0.0
2 )
20+/-0.022-ϕ3H7 Depth 6
Detail of section A
(42)
9.54.5
Use M4 x 0.7 hex socket head bolt with length head bolt with length (under head) of 15mm or more.
N-ϕ
8
X stroke + 183L (X stroke + 254.5)
N-ϕ4.5 through (B-B)
Cross-section of cable carrier
62
2519
50
ϕ7.6ϕ8.2
PXYx 2 axes A3
B-B (installation holes in detail)
44 5690
55.5
63
39.5Approx. 250 (Motor cable length) 50 or more
A
(42)
9.54.5
Use M4 x 0.7 hex socket head bolt with length head bolt with length (under head) of 15mm or more.
Note 1
6654.545185+/-3X stroke
105
64.5
65Y
stro
ke80
+/-3
66
Y st
roke
+ 1
98
68.5X stroke + 183L (X stroke + 254.5)
160
7353
(144
)56
.5
M x 40 128.540 B
B
6257
.553
23
(43)
35(90)
4-M4 x 0.7 Depth 9
30 (B
etw
een
knoc
ks +
/-0.0
2 )
20+/-0.022-ϕ3H7 Depth 6
Detail of section A
N-ϕ
8
Cross-section of cable carrier
62
2519
50
ϕ7.6ϕ8.2
(67.
5)45
N-ϕ4.5 through (B-B)
2 axes

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
254
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 12
250 12
350 11
450 9
550 7
X-axis Y-axis
Axis construction – –
AC servo motor output (W) 100 60
Repeatability Note 1 (mm) +/-0.01 +/-0.02
Drive system Ball screw Ball screw
Ball screw lead Note 2 (Deceleration ratio) (mm) 20 12
Maximum speed Note 3 (mm/sec) 1200 800
Moving range (mm) 150 to 1050 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Positioning repeatability in one direction.Note 2. Leads not listed in the catalog are also available. Contact us for details.Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
FXYx C RCX222Model Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 105cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. EN: Ethernet EN: Ethernet Note 3
Note 2. Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
FXYx 2 axes A1
92
5
Y st
roke
X stroke
5
5
82.5Note 1
85
212+/-3
Y st
roke
+ 2
59(2
.5)
115+
/-3
90.5
(L + 5)
166.5
85
511
5
149.
5
L (X stroke + 310)(2.5)
75
(165
)
43
61
(50) 149
KM x 200100200
95
120 40
122.5 D+/-0.02
115
115
80
64
A 8013
9.5
16
B
76.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more
24
(14)
4.3
7.3
23.56.5
(Bet
wee
nkn
ocks
+/-0
.02 )
8090
90
36
8 - M5 x 0.8 Depth 8 20 (Between knocks +/-0.02)
25
73
35
57
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 6
Cross-section of cable carrier
ϕ8.2
ϕ7.6
ϕ9.7
ϕ29 (Note 2)
2-ϕ10H7 Depth 14
N-ϕ6.5 through (C)
Arm type Cable carrier
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 460 560 660 760 860 960 1060 1160 1260 1360
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 6 8 8 10 10 12 12 14 14 16
Y stroke 150 250 350 450 550Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
255
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYx 2 axes
FXYx 2 axes A2
3.5
4.3
2
7.3
6.5
16
B
76.5
115
115
8064
4361A80
139.
5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more
24
92
5
Y st
roke
X stroke
5 5
82.5 Note 1
85
178+/-3
Y st
roke
+ 2
5911
5+/-3
90.5
115
149.
5(2
.5)
M
5
(L + 5)
166.585
L (X stroke + 310)(2.5)
75 (165
)
(50) 149
KM x 200100200
120 40
122.5
95
8 - M5 x 0.8 Depth 8
8090
90
3620 (Between knocks +/-0.02)
MM
25
7335
57(B
etwe
enkn
ocks
+/-0
.02 )
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 6
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
ϕ29 (Note 2)
D +/-0.02 2-ϕ10H7 Depth 14
N-ϕ6.5 through (C)
(14)
FXYx 2 axes A4
X stroke
82.5Note 1
92
5
Y st
roke
115+
/-3
55
90.5
511
5
149.
5
85
178+/-3
Y st
roke
+ 2
59(2
.5)
M
(L + 5)
166.585
(2.5)L (X stroke + 310)
75(165
)
(50)149
115
115
8064
43 61
8013
9.5
A
16
B
76.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more.
24
(14)
3.5
4.3
2
7.3
6.5
MM
8 - M5 x 0.8 Depth 8
8090
90
3620 (Between knocks +/-0.02)
(Bet
ween
knoc
ks +
/-0.0
2 )
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 6
25
73
35
57
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
ϕ29 (Note 2)
K M x 200 100200
95
12040
122.5D +/-0.022-ϕ10H7 Depth 14
N-ϕ6.5 through (C)
FXYx 2 axes A3
3.5
4.3
2
7.3
6.5
(14)
16
B
76.5
115
115
8064
A8013
9.5
Y st
roke
+ 2
61.5
Y st
roke
115+
/-35
90.5
Note 1
511
514
9.5
92
5
X stroke
5
82.585
212+/-3
(L + 5)
166.585
(2.5)L (X stroke + 310)
75(165
)
(50)149
K M x 200 100200
95
12040
122.5
43
61
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more.
24
Detail of section C
8 - M5 x 0.8 Depth 8
8090
90
3620 (Between knocks +/-0.02)
(Bet
ween
knoc
ks +
/-0.0
2 )
Detail of section A Detail of section B
2-ϕ5H7 Depth 6
25
73
35
57
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
ϕ29 (Note 2)
D +/-0.022-ϕ10H7 Depth 14
N-ϕ6.5 through (C)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
256
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 12
250 12
350 11
450 9
550 7
X-axis Y-axis
Axis construction – –
AC servo motor output (W) 100 60
Repeatability Note 1 (mm) +/-0.01 +/-0.02
Drive system Ball screw Ball screw
Ball screw lead Note 2 (Deceleration ratio) (mm) 20 12
Maximum speed Note 3 (mm/sec) 1200 800
Moving range (mm) 150 to 1050 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Positioning repeatability in one direction.Note 2. Leads not listed in the catalog are also available. Contact us for details.Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
FXYx C IO RCX222Model Cable Combination X-axis
strokeY-axis stroke
ZR-axis Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 105cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. EN: Ethernet EN: Ethernet Note 3
Note 2. Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
FXYx 2 axes / IO A1
92X stroke
82.585
212+/-3
5
Y st
roke
115+
/-3
5
5
90.5
166.585
Note 1
511
5
149.
5
Y st
roke
+ 2
59(2
.5)
75
(165
)
43
61
(50) 149
KM x 200100200
95
120 40
122.5
(Bet
wee
nkn
ocks
+/-0
.02 )
8090
90
36
100
8 - M5 x 0.8 Depth 8
3.54.
37.
3
2
6.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more.
24
(14)
16
B
76.5
(84)
115
115
8064 80
139.
5(1
53)
5013
3.5
37
60135
A
20 (Between knocks +/-0.02)
6250
2519
7357
3525
YZ
XY
YZ
XY
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 6
Cross-section of cable carrier
Cross-section of cable carrier
ϕ8.2
ϕ7.6
ϕ9.7
ϕ9.7
ϕ29 (Note 2)
ϕ29 (Note 2)
(L + 5)
L (X stroke + 310)(2.5)
D+/-0.02
N-ϕ6.5 through (C)
2-ϕ10H7 Depth 14
Arm type Cable carrier Type with Y-axis I/O cable carrier added
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 460 560 660 760 860 960 1060 1160 1260 1360
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 6 8 8 10 10 12 12 14 14 16
Y stroke 150 250 350 450 550Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / IO
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
257
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
FXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 3 5
250 3 5
350 3 5
450 3 5
550 3 3
X-axis Y-axisZ-axis: ZS12
Z-axis: ZS6
Axis construction – – –
AC servo motor output (W) 100 60 60
Repeatability Note 1 (mm) +/-0.01 +/-0.02 +/-0.02
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 2 (Deceleration ratio) (mm) 20 12 12 6
Maximum speed Note 3 (mm/sec) 1200 800 1000 500
Moving range (mm) 150 to 1050 150 to 550 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Positioning repeatability in one direction.Note 2. Leads not listed in the catalog are also available. Contact us for details.Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
FXYx C 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke
ZR-axis
Z-axis stroke Cable
A1 15 to 105cm 15 to 55cm ZS12 3L: 3.5m A2 ZS6 5L: 5mA3 10L: 10mA4
FXYx 3 axes / ZS A1
Y st
roke
115+
/-3
X stroke
115
149.
5
Y st
roke
+ 2
59
322+/-35 5
5
90.5
166.5
85
Note 1
5
L (X stroke + 310)(2.5)
(L + 5)
(2.5
)
75 (165
)
43
61
(50) 149
95
115
80
64139.
5
115
8030
5
40
72
Z st
roke
Note 1
105
66 95
+/-2
Detail of section A Detail of section B Detail of section C
0-0.018
3641
M8 x 1.25Depth 15
4.3
7.3
3.56.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more.
(14)
2
24
7357
6250
39.5
79.5(2.5)
110
101
299
67
84
(153
)55
.5
A
92242
67.5
B
70
MM
MM
25 35 19 25
YZ
YZ
XY
ϕ29 (Note 2)
KM x 200100200
120 40
122.5 D+/-0.02
N-ϕ6.5 through (C)
2-ϕ10H7 Depth 14
ϕ12
ϕ5
XY Cross-section of cable carrier Cross-section of cable carrier
ϕ9.7 ϕ9.7 ϕ8.2ϕ7.6
ϕ10.1ϕ9.9
MM
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 460 560 660 760 860 960 1060 1160 1260 1360
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 6 8 8 10 10 12 12 14 14 16
Y stroke 150 250 350 450 550
Z stroke 150Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec)Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZS
Arm type Cable carrier Z-axis shaft vertical type
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
258
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
FXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZT
150 to 550 3X-axis Y-axis Z-axis
Axis construction Note 1 – – T6L-12-BK
AC servo motor output (W) 100 60 60
Repeatability Note 2 (mm) +/-0.01 +/-0.02 +/-0.02
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 12 12
Maximum speed Note 4 (mm/sec) 1200 800 800
Moving range (mm) 150 to 1050 150 to 550 50 to 300
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
FXYx 3 axes / ZT A1
115+
/-3
82.5Note 1
115
149.
5
L (X stroke + 310)
Y st
roke
+ 2
59
278+/-3 X stroke(2.5)
Y st
roke
5
90.5
(L + 5)
166.585
5
(2.5)
(2.5
)
5 5
120
75(1
65)
43
61
(50) 149
115
115
8064
A
8013
9.5
Z st
roke
+ 2
85.5
3119
4.5+
/-2
6544
6
82.5
Note 1
Z st
roke
6
45
30 +/-0.02
(116
)
(57)
4 - M5 x 0.8 Depth 11Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 35mm or more.
24
(14)
4.3
7.3
23.56.5
B
(208
)39
.5
99
4856
181
51
10
79.570
53
69.5
39
92
MM
MM
MM
40 (Between knocks +/-0.02)
7357
6250
25 35 19 25
YZ
XY
2-ϕ3H7 Depth 6
Detail of section A Detail of section B Detail of section C
XY Sectional drawing of cable carrier YZ Sectional drawing of cable carrier
ϕ10.1ϕ9.9
ϕ9.7 ϕ9.7 ϕ8.2ϕ7.6
ϕ29 (Note 2)
95
KM x 200100200
120 40
122.5 D+/-0.02
N-ϕ6.5 through (C)
2-ϕ10H7 Depth 14
Arm type Cable carrier Z-axis: clamped base / moving table type (60W)
FXYx C ZT6L 12Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Lead Z-axis
stroke Cable
A1 15 to 105cm
15 to 55cm
5 to 30cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 460 560 660 760 860 960 1060 1160 1260 1360
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 6 8 8 10 10 12 12 14 14 16
Y stroke 150 250 350 450 550
Z stroke 50 100 150 200 250 300Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZT
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
259

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
260
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYBx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY axes
150 7
250 6
350 5
450 5
550 3
X-axis Y-axis
Axis construction Note 1 B10 –
AC servo motor output (W) 100 100
Repeatability Note 2 (mm) +/-0.04 +/-0.04
Drive system Timing belt Timing belt
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25
Maximum speed (mm/sec) 1875 1875
Moving range (mm) 150 to 2450 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
FXYBx C RCX222Model Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 245cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
FXYBx 2 axes A1
MM
MM
263+/-3 X stroke
79.5
(50)
166 89.7 *2.7
*2.9
177.
2
12.5
Y st
roke
100 14
1+/-3
Y st
roke
+ 3
00
12.5
122
89.5
85.5
127.
2
12.512.5Note 1
145
80
75 152
L (X stroke + 410)
GJ
2351
3453
Note 2
168
79 73.5
3281
15222
(195
)
20.6
167
100 M x 200 K200
N-M5 x 0.8 Depth 1085 40
80
140
7911
5.5
122.5
8476.7
A
39.5
47.5
B
80
2
7.3
4.3
6.53.5
(Bet
ween
knoc
ks +
/-0.0
2 )
5270
75 100
10085
25 35
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
4 - M5 x 0.8 Depth 6
2-ϕ5H7 Depth 4
Detail of section A Detail of section B
Arm type Cable carrier
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper. Note 2. The shaded position indicates an user cable extraction port.
Note 3. The dimension marked with an asterisk (*) indicates the height of the screw.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450
L 560 660 760 860 960 1060 1160 1260 1360 1460 1560 1660 1760 1860 1960 2060 2160 2260 2360 2460 2560 2660 2760 2860
K 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200
M 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12
N 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30
G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50
J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430
Y stroke 150 250 350 450 550
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
261
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYBx 2 axes
FXYBx 2 axes A2207+/-3
75 152
89.5
85.5
145
79.5
(50)
*2.7
X stroke
12.512.5 Note 1
89.797
*2.9
177.
212
.5Y
stro
ke10
0 141+
/-3 Y st
roke
+ 3
00
12.5
122
127.
2
L (X stroke + 410)GJ
79.5
168
79
73.5
(195
)
100 M x 200 K200 N-M5 x 0.8 Depth 10
80
85 40
2351
3281
15222
3453Note 2
80
20.6
167
140
7911
5.5
A
80122.5
76.7
39.5
B
47.5 84
5270
75 100 2
7.3
4.3
6.53.5
MM
MM
10085
25 35
(Bet
wee
nkn
ocks
+/
-0.0
2 )Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
FXYBx 2 axes A4
MM
MM
X stroke
*2.9
177.
2
97
12.5
Y st
roke
10014
1+/-3Y
stro
ke +
300
12.5
12.5 12.5Note 1
L (X stroke + 410)
207+/-3
122
127.
2
79.5
89.7 *2.7
75152
89.5
85.5
145
(50)
G J
100M x 200K200
N-M5 x 0.8 Depth 10
80
79.5
168
79
73.5
(195
)
8540
140
2351
79
3281
15222
115.
5
A
34 53 Note 2
80
20.6
167
80
122.5
8476.7
39.5
B
47.5
5270
75 100 2
7.3
4.3
6.53.5
10085
25 35
(Bet
wee
nkn
ocks
+/-0
.02 )
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
FXYBx 2 axes A3
122.5
8476.7
39.5
47.5
B
140
8079
32
81
15222
115.
5
A
20.6
167
177.
2
263+/-3X stroke
12.5
Y st
roke
10014
1+/-3
Y st
roke
+ 3
00
12.5
12.5 12.5Note 112
2
127.
216689.7*2.7
*2.9
75152
89.5
85.5
L (X stroke + 410)
145
79.5
80
(50)G J
2351
34 53Note 2
168
79
73.5
(195
)
100M x 200K200
N-M5 x 0.8 Depth 10
80
8540
MM
MM
5270
75 100 2
7.3
4.3
6.53.5
10085
25 35
(Bet
wee
nkn
ocks
+/-0
.02 )
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
262
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYBx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 7
250 6
350 5
450 5
550 3
X-axis Y-axis
Axis construction Note 1 B10 –
AC servo motor output (W) 100 100
Repeatability Note 2 (mm) +/-0.04 +/-0.04
Drive system Timing belt Timing belt
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25
Maximum speed (mm/sec) 1875 1875
Moving range (mm) 150 to 950 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
FXYBx S RCX222Model Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 95cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
FXYBx 2 axes A1
MM
263+/-3
*2.9
X stroke
12.5
Y st
roke
100 14
1+/-3
Y st
roke
+ 3
00
12.5
12.512.5 Note 1
145
138
88
80
166 89.7 *2.7
89.5
85.5
L (X stroke + 410)114 130
79.5
40
39
Groundingterminal (M4)
23
100 M x 200 K
200N-M5 x 0.8 Depth 10
8073
.5168
85 40
140
8011
5.5
8476.7
39.5
B
47.5
122.5
788118
7.6
79
130
MA
X. 1
100
167
A
2
7.3
4.3
6.5
3.5
5270
75 100
MM
ϕ29 (Note 2)
ϕ29 (Note 2)
(Bet
wee
nkn
ocks
+/-0
.02 )
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
X stroke 150 250 350 450 550 650 750 850 950 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. The dimension marked with an asterisk (*) indicates the height of the screw.
L 560 660 760 860 960 1060 1160 1260 1360
K 100 200 100 200 100 200 100 200 100
M 1 1 2 2 3 3 4 4 5
N 8 8 10 10 12 12 14 14 16
Y stroke 150 250 350 450 550
2 axes
Arm type Whipover
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
263
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYBx 2 axes
FXYBx 2 axes A2
*2.9
X stroke
12.5
Y st
roke
Y st
roke
+ 3
00
12.5
12.512.5 Note 1
207+/-3214.3 89.7
*2.7
100 14
1+/-3
89.5
85.5
145
138
88
114 130
79.5
40
2
7.3
4.3
6.53.5
5270
75 100
47.5
122.5
84
76.7
39.5
B
140
8011
5.5
78 8118
7.679
MA
X. 1
100
167
23
A
13080
39
M x 200 K200
N-M5 x 0.8 Depth 10
80
168 73
.5
85 40100
MM
MM
(Bet
wee
nkn
ocks
+/-0
.02 )
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
ϕ29 (Note 2)
Groundingterminal (M4)
L (X stroke + 410)
ϕ29 (Note 2)
FXYBx 2 axes A4X stroke
Y st
roke
12.5 Note 1
207+/-3214.389.7
*2.7*2.9
12.5
12.5
12.5
89.5
85.5
L (X stroke + 410)114130
79.5
40
10014
1+/-3
Y st
roke
+ 3
00
138
88
145
M x 200K200
N-M5 x 0.8 Depth 10
16873
.5
8540100
140
8011
5.5
A
788118
7.6 79
130
MA
X. 1
100 80
167
39
23
47.5
122.5
8476.7
39.5
B
MM
MM
80
2
7.3
4.3
6.53.5
5270
75 100
(Bet
wee
nkn
ocks
+/-0
.02 )
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
ϕ29 (Note 2)
Groundingterminal (M4)
ϕ29 (Note 2)
FXYBx 2 axes A3
m
8476.7
39.5
B
47.5
122.5
140
8011
5.5
A
78 8118
7.679
130
MA
X. 1
100
167
*2.9
263+/-3X stroke12
.5
Y st
roke
100
141+
/-3Y st
roke
+ 3
00
12.5
12.5 12.5Note 1
89.5
85.5
L (X stroke + 410)
145
138
88
114130
79.5
80
166*2.7
40
100M x 200K200
N-M5 x 0.8 Depth 10
8073
.5 168
39
8540
23
89.7
MM
2
7.3
4.3
6.53.5
5270
75 100
(Bet
wee
nkn
ocks
+/-0
.02 )
4 - M5 x 0.8 Depth 62-ϕ5H7 Depth 4
Detail of section A Detail of section B
ϕ29 (Note 2)
Groundingterminal (M4)
ϕ29 (Note 2)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
264
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
FXYBx Arm type Cable carrier
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 7
250 6
350 5
450 5
550 3
X-axis Y-axis
Axis construction Note 1 B10 –
AC servo motor output (W) 100 100
Repeatability Note 2 (mm) +/-0.04 +/-0.04
Drive system Timing belt Timing belt
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25
Maximum speed (mm/sec) 1875 1875
Moving range (mm) 150 to 2450 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
FXYBx C IO RCX222Model Cable Combination X-axis stroke Y-axis stroke ZR-axis Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 245cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
FXYBx 2 axes / IO A1
Note 112.5 12.5
12.5
Y st
roke
+ 3
00
141+
/-3
12.5
X stroke
Y st
roke
166 89.7 *2.7263+/-3
L (X stroke + 410)
85.5
89.5
15275
100
122
177.
2
79.5
*2.9
127.
2
(50)GJ
73.57916
8
Note 253 34
5123
(195
)
145
80
80
N-M5 x 0.8 Depth 10KM x 2001004085200
3.56.5
4.3
7.3
2
5270
75 100
47.5
122.5
8476.7
39.5
B
3.5
(3)
94
22
140
81 140
32
79
20.6
167
152
115.
580
(163
)
A
5013
3.5
37
60
MM
MM
Cross-section of cable carrier Cross-section of cable carrier
10085 73
57
25 35
25 35XY YZ
XY
YZ
(Bet
wee
n kn
ocks
+/-0
.02 )
4 - M5 x 0.8 Depth 6
2-ϕ5H7 Depth 4
Detail of section A Detail of section B
ϕ9.7ϕ9.7
ϕ8.2ϕ7.6
ϕ29 (Note 2)
(ϕ37
)
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper. Note 2. The shaded position indicates an user cable extraction port.
Note 3. The dimension marked with an asterisk (*) indicates the height of the screw.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450
L 560 660 760 860 960 1060 1160 1260 1360 1460 1560 1660 1760 1860 1960 2060 2160 2260 2360 2460 2560 2660 2760 2860
K 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200
M 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12
N 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30
G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50
J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430
Y stroke 150 250 350 450 550
2 axes / IO
Type with Y-axis I/O cable carrier added
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
265

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
266
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 20
250 17
350 15
450 13
550 11
650 9
X-axis Y-axis
Axis construction Note 1 F14H F14
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 150 to 1050 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C RCX222Model Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 105cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
SXYx 2 axes A1
8377.5
X stroke284+/-3
Note 1
191.
5
Y st
roke
+ 2
55
Y st
roke
140+
/-3
161.
5
513
6
55
5
35 X stroke + 215
59.5205
L (X stroke + 320)
32
90
110
70
135
4.57.2
2.8
6.5
Detail of section CDetail of section BDetail of section A
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5(18.5)
N-M6 x 1.0 Depth 10
110
100
114KM x 200156151
See detaild drawing of C section
200
200139KM x 200131
77.5(50)
34
23
53Note 2
51
(171
) 242
79125
79
(105
)
173
64.5239
136
A42
7.5
B
MM
MM
25 35
7793
(ϕ10
H7)
8 - M6 x 1.0 Depth 8
2-ϕ6H7 Depth 8
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
D +/-0.02
N-ϕ7 through (C)2-ϕ10H7
(Bet
wee
n kn
ocks
+/-0
.02 )
Arm type Cable carrier
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
267
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx 2 axes
SXYx 2 axes A2
Y st
roke
+ 2
55Y
stro
ke
83X stroke136+/-3
519
1.5
140+
/-313
6
77.5
5
161.
5
Note 1
170
5
X stroke + 215L (X stroke + 320)
6.5
5
35
(18.5)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
4.57.2
2.8
6.5
32
90
110
70
135
(105
)
173
136
24223
5164.5
79 125
79
53239
A Note 2
34
77.5
83
7.542
(50)
B
114KM x 200156200
200139KM x 200131
151
100
110
9
(171
)
MM
MM
25 35
7793
Detail of section CDetail of section BDetail of section A
(ϕ10
H7)
8 - M6 x 1.0 Depth 82-ϕ6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
N-M6 x 1.0 Depth 10
See detaild drawing of C section D +/-0.02
N-ϕ7 through (C)2-ϕ10H7
SXYx 2 axes A4
Y st
roke
+ 2
55
8377.5
X stroke 136+/-3
161.
5
Note 1
X stroke + 215L (X stroke + 320)
5
170
191.
55
136
5
6.5
5
35
77.5
(171
)
7.542
(50)
B
114 K M x 200 156200
200139 K M x 200 131
151
100
110
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(18.5)5.5
(105
)17
364.534 53 239Note 2
242 23
5179125
79
83
136
A
9
MM
MM
4.57.2
2.8
6.5
32
90
110
70
135
Detail of section B Detail of section CDetail of section A
8 - M6 x 1.0 Depth 82-ϕ6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
25 35
7793
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
(ϕ10
H7)
N-M6 x 1.0 Depth 10
N-ϕ7 through (C)
D +/-0.02 See detaild drawing of C section2-ϕ10H7
Y st
roke
140+
/-3
SXYx 2 axes A3
4.57.2
2.8
6.5
427.5
B
(105
)13
6
242
79 125
79
173
64.5239
A
191.
5Y
stro
ke +
255
Y st
roke
140+
/-35
136
5
83
5
X stroke 284+/-3
161.
5
Note 1
X stroke + 215L (X stroke + 320)
59.5205
5
77.5
35
(171
)
(50)
53
5123
Note 234
77.5
N-M6 x 1.0 Depth 10
114 K M x 200 156200
200139 K M x 200 131
110
100
151 See detaild drawing of C sectionD +/-0.02
MM
MM
(18.5)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
32
90
110
70
135 9
Detail of section CDetail of section BDetail of section A
(ϕ10
H7)
8 - M6 x 1.0 Depth 82-ϕ6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
25 35
7793
Cross-section of cable carrier
ϕ8.2ϕ7.6
ϕ9.7
N-ϕ7 through (C)2-ϕ10H7

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
268
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 20
250 17
350 15
450 13
550 11
650 9
X-axis Y-axis
Axis construction Note 1 F14H F14
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 150 to 850 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S RCX222Model Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 85cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
SXYx 2 axes A1
Y st
roke
+ 2
55
Y st
roke
140+
/-3
8377.5
X stroke284+/-3
Note 1
81 51
513
6
55
5
(50)
122.
514
.8
731
130
L (X stroke + 320)
Note 253
51
34
23
114KM x 200156200
200139KM x 200131
110
100
151
108
83
(105
)
135
64.5
239
MA
X. 1
000
136
173 24
2
A
32
90
110
70
135
4.57.2
2.8
6.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(18.5)
MM
MM
Detail of section CDetail of section BDetail of section A
(ф10
H7)
8 - M6 x 1.0 Depth 8
2-ф6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02)
N-M6 x 1.0 Depth 10
See detaild drawing of C section D +/-0.02
N-ф7 through (C)2-ф10H7
77.5
79
B
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke 150 250 350 450 550 650Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending
on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
2 axes
Arm type Whipover
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
269
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx 2 axes
SXYx 2 axes A2
73(50)
122.
5
130L (X stroke + 320)
14.84.5
7.2
2.8
6.5
32
90
110
70
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5(18.5)
8377.5
5
X stroke
Note 1
136+/-3
135
1 81 51Y
stro
ke +
255
Y st
roke
140+
/-35
136
5
5
108
Note 2
136
242
5113
5
173
34
23
53
MA
X. 1
000
A
(105
)
8364.5
239
114KM x 200156200
200139KM x 200131
151
110
100
MM
Detail of section CDetail of section BDetail of section A
(ф10
H7)8 - M6 x 1.0 Depth 8
2-ф6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
N-M6 x 1.0 Depth 10
See detaild drawing of C section D +/-0.02
N-ф7 through (C)2-ф10H7
MM
B
7977
.5
427.5
SXYx 2 axes A4
73181
(50) 122.
5
51 130
Y st
roke
+ 2
55Y
stro
ke14
0+/-3
513
6
5
8377.5
5
X stroke
Note 1
L (X stroke + 320)
5 14.8
136+/-3
32
90
110
70
135
5.5(18.5)
94.5
2.8
6.5
7.2
200139 K M x 200 131
114 K M x 200 156200
151
110
100
136
242
173
(105
)Note 2 345364.5
239
108
5113
5 23
MA
X. 1
000
A
83
MM
MM
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
Detail of section CDetail of section BDetail of section A
(ф10
H7)
8 - M6 x 1.0 Depth 8
2-ф6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
N-M6 x 1.0 Depth 10
See detaild drawing of C sectionD +/-0.022-ф10H7
N-ф7 through (C)
B7.5
42
77.5
79
SXYx 2 axes A3
(105
)13
617
3
MA
X. 1
000
242
108
8313
5
64.5239
A
73 181
130
(50)
122.
5
51Y
stro
ke +
255
Y st
roke
140+
/-35
136
583
77.55
X stroke 284+/-3
Note 1
L (X stroke + 320)
5 14.8
Note 2
53
51
34
23
100
110
131M x 200K139200
200156K114
N-M6 x 1.0 Depth 10
151
MM
MM
4.57.2
2.8
6.5
32
90
110
70
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5(18.5)
135
Detail of section CDetail of section BDetail of section A
(ф10
H7)8 - M6 x 1.0 Depth 8
2-ф6H7 Depth 8
(Bet
wee
n kn
ocks
+/-0
.02 )
M x 200See detaild drawing of C sectionD +/-0.022-ф10H7
N-ф7 through (C)
B7.5
42
77.5
79

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
270
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 19
250 16
350 14
450 12
550 10
650 8
X-axis Y-axis
Axis construction Note 1 F14H F14
AC servo motor output (W) 200 100
Repeatability Note 2(mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4(mm/sec) 1200 1200
Moving range (mm) 150 to 1050 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C IO RCX222Model Cable Combination X-axis
strokeY-axis stroke ZR-axis Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
A1 15 to 105cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
SXYx 2 axes / IO A1
191.
5
Y st
roke
+ 2
55
Y st
roke
140+
/-3513
6
55
X stroke296+/-3
161.
5
Note 1
5
77.5
35 X stroke + 215L (X stroke + 320)
59.5205
53
5123
Note 234
(171
)77
.5(50)
114KM x 200156200
200139KM x 200131
151
110
100
(105
)
64.5
136
242
173
79125
79
(168
)
239
37149
A
9083
T 111
2564
240
6
8312 42
108
4968
B
115
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5(18.5)
4.5
7.2
2.8
6.5
4-M6 x 1.0
4-M5 x 0.8
296.
5
70
11.5
70
25
MM
MM
7357
25 35
25 35
7793
YZ
XY
Cross-section of cable carrierXY Cross-section of cable carrierYZ
Detail of section A Detail of section B Detail of section C
(ϕ10
H7)
ϕ29 (Note 2)
N-M6 x 1.0 Depth 10
See detaild drawing of C section D +/-0.02
2-ϕ10H7N-ϕ7 through (C)
ϕ9.7 ϕ9.7ϕ8.2ϕ7.6
Arm type Cable carrier
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / IO
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
271

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
272
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 10 10 10
250 10 10 9
350 9 8 7
450 7 6 5
550 5 4 3
650 3 2 1
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14 F10-BK
AC servo motor output (W) 200 100 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 150 to 1050 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZFModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZF A1
MM
Note 1
355+/-3 X stroke577.5 5
20559.5
L (X stroke + 320)X stroke + 21535
3311
5
136
161.
5
5
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
191.
5
5
34
2351
53Note 2
(409
)
(50)
77.5
(171
)
N-M6 x 1.0 Depth 10200139KM x 200131
114KM x 200156200
151
110
100
4 - M5 x 0.8 Depth 12
110
70 86
6.52.8
7.2
4.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more
5.5(18.5)
9
B
123.5
68
4.5
7949
68
65
71 83 42
190
136
(105
)
Z st
roke
+ 2
90
Z st
roke
195+
/-2
173
40.5
127
5
5
(168
)
64.5239 102
7912
579
242
109Note 1A
T 111
83
115
6
100 (Between knocks +/-0.02)
MM
MMXY
YZ
3525
57
3525
77
93 73
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 15
(ϕ10
H7)
ϕ9.7 ϕ10.1ϕ9.9
ϕ9.7 ϕ8.2ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ
See detaild drawing of C section
D +/-0.02
2-ϕ10H7 N-ϕ7 through (C)
Arm type Cable carrier Z-axis: clamped base / moving table type (100W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZF
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
273
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 10 10 10
250 10 10 9
350 9 8 7
450 7 6 5
550 5 4 3
650 3 2 1
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14 F10-BK
AC servo motor output (W) 200 100 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 150 to 850 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S ZFModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 85cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZF A1
MM
70
130
(50)
X stroke355+/-3
136 40
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
Note 1
L (X stroke + 320)
44
55
123.
5(3
0) 123.5
55
86
4 - M5 x 0.8 Depth 12
9Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
110 5.5
70
60.5
Z st
roke
Z st
roke
+ 3
5040
.525
5+/-2
109
187
55
15 65(6.5) (40)4.5
77.571 83 4268
83
242
79
30
64.5
173
(105
)13
6
MA
X. 1
200 130
239
Note 1
102
A
34 53
5123
Note 2
N-M6 x 1.0 Depth 10131 M x 200 K 139
200
200156 M x 200 K 114151
110
100
MM
100 (Between knocks +/-0.02)
MM
Detail of section A Detail of section B
2-ф5H7 Depth 15
(18.5)
(ф10
H7)
See detaild drawing of B section D +/-0.02
2-ф10H7 N-ф7 through (B)
ф37
77.5
79
Arm type Whipover Z-axis: clamped base / moving table type (100W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZF
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
274
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 8 8 8
250 8 8 8
350 8 7 6
450 6 5 4
550 4 3 2
650 2 1 1
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20
Maximum speed Note 4 (mm/sec) 1200 1200 1200
Moving range (mm) 150 to 1050 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZFL20Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZFL20 A1
MM
MM
Note 1355+/-3 X stroke
577.5 5
136
20559.5
L (X stroke + 320)X stroke + 215
161.
5
35
514
0+/-3
Y st
roke
Y st
roke
+ 2
55
191.
5533
115
110
156
7070
8
6 - M5 x 0.8 Depth 12
70+/
-0.0
243
6.52.8
7.2
4.5
9Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
34
23
53Note 2
242
79125
79
1156
(409
)
77.5
(171
)
51
(50) 64.5239 102
145
248+
/-2Z
stro
ke33
.5Z
stro
ke +
385
173
136
(105
)49
55
109
Note 1
T 111
A
83
N-M6 x 1.0 Depth 10
114KM x 200156
110
100
151
200
200139KM x 200131
68
79
71 83 42
190
B
123.5(76)
100 (Between knocks +/-0.02)
MM
3525
57
3525
77
93 73
YZ
XY
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 15
(18.5)
(ϕ10
H7)
See detaild drawing of C section
D +/-0.02
2-ϕ10H7N-ϕ7 through (C) ϕ9.7 ϕ10.1
ϕ9.9ϕ9.7 ϕ8.2
ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZFL20
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
275
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 13 12 11
250 10 9 8
350 8 7 6
450 6 5 4
550 4 3 2
650 2 1 1
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 150 to 1050 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZFH A1
Note 1
375+/-3 X stroke577.5 5
136
20559.5
L (X stroke + 320)X stroke + 215
161.
5
35
514
0+/-3
Y st
roke
Y st
roke
+ 2
55
191.
5
3311
5
5
34
23
(409
)
51
(50)
77.5
(171
)
53Note 2
79125
7924
2
1154
N-M6 x 1.0 Depth 10
114KM x 200156
200139KM x 200131
110
100
151
200
6210
011
2
4 - M5 x 0.8 Depth 9
6.52.8
7.2
4.5 Use M6 x 1.0 hex socket head bolt
with length head bolt with length (under head) of 20mm or more.
9
5.5
64.5239
173
136
(105
)49
102Note 1
83
Z st
roke
Z st
roke
+ 3
8513
9.5+
/-213
05
5
A
109(111)86
T 111
79
71 83 42
190
123.5
B
20
(152)
68
26
145
7670 (Between knocks +/-0.02)
MM
MM
MM
3525 3525
57
3525
77
93 735773
YZ
XY
Z
Detail of section A Detail of section B Detail of section C
2-ϕ5H7 Depth 8
(18.5)
(ϕ10
H7)
See detaild drawing of C section D +/-0.02
2-ϕ10H7N-ϕ7 through (C) ϕ9.7 ϕ10.1
ϕ9.9ϕ9.7 ϕ8.2
ϕ7.6ϕ8.2ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ Cross-section of cable carrierZ
Arm type Cable carrier Z-axis: clamped table / moving base type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZFH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
276
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 to 650 3 5X-axis Y-axis
Z-axisZS12
Z-axisZS6
Axis construction Note 1 F14H F14 –
AC servo motor output (W) 200 100 60
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.02
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 12 6
Maximum speed Note 4 (mm/sec) 1200 1200 1000 500
Moving range (mm) 150 to 1050 150 to 650 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm ZS12 3L: 3.5m A2 ZS6 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZS A1
20559.5
L (X stroke + 320)X stroke + 215
Note 1
35
X stroke577.5 5
Y st
roke
+ 2
55
394+/-3
136
161.
5
5
140+
/-3Y
stro
ke19
1.5
53811
5
(171
)
(409
)
77.5(50)
34
2351
53Note 2
114KM x 200156200
151
N-M6 x 1.0 Depth 10200139KM x 200131
100+
/-2
300
66
Z st
roke
173
(105
)13
6(1
68)
7240
7912
5
79
242
83
64.5239
Note 1
0-0.018
3641 6.52.8
7.2
4.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
4283
233110
67.5
6729
910
1
A
49150
B
7919
0124
115
68
6
110
100
T 111
MM
MM
3525
57
3525
77
93
73
YZ
XY
M8 x 1.25 Depth 15
Detail of section A Detail of section B Detail of section C
(18.5) (ϕ
10H
7)
ϕ9.7
5
ϕ12 ϕ10.1ϕ9.9
ϕ9.7 ϕ8.2ϕ7.6
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
See detaild drawing of C section
D +/-0.02
2-ϕ10H7 N-ϕ7 through (C)
Arm type Cable carrier Z-axis shaft vertical type
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 215 270 325
Z stroke 150Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
3 axes / ZS
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
277
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 to 650 3 5X-axis Y-axis
Z-axis: ZS12
Z-axis: ZS6
Axis construction Note 1 F14H F14 –
AC servo motor output (W) 200 100 60
Repeatability Note 2(mm) +/-0.01 +/-0.01 +/-0.02
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 12 6
Maximum speed Note 4(mm/sec) 1200 1200 1000 500
Moving range (mm) 150 to 850 150 to 650 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 85cm 15 to 65cm ZS12 3L: 3.5m A2 ZS6 5L: 5mA3 10L: 10mA4
SXYx 3 axes / ZS A1
(50)
X stroke
15
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
Note 1
L (X stroke + 320)
55
55394+/-3
(30)
123.
5
70
130
136 40
44
123.5
3641
5.5
9
34 53
5123
Note 2
KM x 200156200
114151
200139KM x 200131
N-M6 x 1.0 Depth 10
100
110
83
242
79
30
64.5239
(105
)13
6
MA
X. 1
100
173
100+
/-2Z
stro
ke30
0
72
66
13040
Note 1
77.5
4283110
233
101
299
67
178.
5225
A
67.5
MM
MM
0-0.018
M8 x 1.25 Depth 15
Detail of section A Detail of section B
ф5
ф12
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(18.5)
(ф10
H7)
See detaild drawing of B section D +/-0.02
2-ф10H7 N-ф7 through (B)
77.5
79
Arm type Whipover Z-axis shaft vertical type
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke 150 250 350 450 550 650
Z stroke 150
Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZS
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
278
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 6 6 6
250 6 5 4
350 4 3 2
450 3 2 1
550 2 1 –
650 1 – –
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F14H F14 F10-BK R5
AC servo motor output (W) 200 100 100 50
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm) (R: °) 150 to 1050 150 to 650 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZRFModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRF A1
MM
MM
Y st
roke
+ 2
55Y
stro
ke14
0+/-3
5
X stroke
161.
5
Note 1
5
77.5407.5+/-3
191.
5
(201)5 5
X stroke + 215L (X stroke + 320)
59.535
115
33
136
205
53
5123
Note 234
(171
)
(50)
77.5
110
100
131 M x 200 K 139200
200156 M x 200 K 114
N-M6 x 1.0 Depth 10
151
19 (W
idth
ac
ross
flat
)
56.6
56.6
37.5 4.5
7.2
2.86.5
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
9
136
242
79125
79
Z st
roke
+ 2
90
Z st
roke
+ 1
32
127
168+
/-2
55 Z
stro
ke
173
(168
)
152
109
T 111
64.5239
40.5 72
Note 1
110102
85
90
7824
2
6
123.5
A
86
(30)
4.565
79
123.5(152)
190
B
83 42
6849
1156871
6
1576
75
46
MM
MM
25 35
5773
ZR
25 35
5773
25 35
7793
YZ
XY
Detail of section A Detail of section B Detail of section C
M8 x 1.25 Depth 20
4-M6 x 1.0 Depth 16
(18.5)
(ϕ10
H7)
ϕ9.7
ϕ11ϕ11ϕ9.9ϕ9.9
ϕ9.7ϕ9.7ϕ7.6
ϕ9.7ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ
Cross-section of cable carrier
See detailddrawing of C section D +/-0.02
2-ϕ10H7 N-ϕ7 through (C)
ϕ22ϕ20h7
ϕ65h7
8
20
41
13
ZR
Arm type Cable carrier Z-axis: clamped base / moving table type (100W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
4 axes / ZRF
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
279
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 6 6 6
250 6 5 4
350 4 3 2
450 3 2 1
550 2 1 –
650 1 – –
SXYx S ZRFModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 85cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRF A1
MM
MM
MM
(50)
X stroke
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
Note 1
L (X stroke + 320)
55
(30)
407.5+/-3
130
15
44
123.
5
70136 40123.5
55
8
20
41
13
37.5
56.6
56.6
5.5
9
34 53
5123
Note 2
KM x 200156200
200139KM x 200131
N-M6 x 1.0 Depth 10
114151
100
110
83
242
79
64.5
239
173
(105
)13
6
MA
X. 1
150
102
Note 1 72
110
30 130
Z st
roke
168+
/-212
7
Z st
roke
+ 1
32Z
stro
ke +
290
35.55
5
152
90
109115
71
6
123.5
15
123.5
65
75
78
68A
242
190
79
(30)
4.5
76
MM
Detail of section A Detail of section B
19 (W
idth
ac
ross
flat
)4-M6 x 1.0 Depth 16
ф65h7
ф22
ф20h7
M8 x 1.25 Depth 20
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(18.5)
(ф10
H7)
See detailddrawing of B section D +/-0.02
2-ф10H7 N-ф7 through (B)
77.5
79
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F14H F14 F10-BK R5
AC servo motor output (W) 200 100 100 50
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm) (R: °) 150 to 850 150 to 650 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
Arm type Whipover Z-axis: clamped base / moving table type (100W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
4 axes / ZRF
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
280
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 4 4 4
250 4 4 3
350 4 3 1
450 2 1 –
550 1 – –
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 200 100 200 50
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 1200 360
Moving range (XYZ: mm) (R: °) 150 to 1050 150 to 550 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZRFL20Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 55cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRFL20 A1
MM MM
205
L (X stroke + 320)X stroke + 215
Note 1
35
407.5+/-3 X stroke577.5 5
Y st
roke
+ 2
55
136
59.5
161.
5
514
0+/-3
Y st
roke
191.
5
3311
5
5
13
4120
56.6
56.6
37.5
6.52.8
7.2
4.5 9
5.5
34
2351
53Note 2
(409
)
(50)
77.5
(171
)
79125
7924
2
1154
114KM x 200156200
151
N-M6 x 1.0 Depth 10200139KM x 200131
110
100
Z st
roke
+ 3
85Z
stro
ke +
132
145
168+
/-25
5 Z st
roke
240
173
136
(105
)49
110
90
72
Note 1
102
83
64.5239
109
T 111
85
33.5
123.5
123.5
75
(152)
624
278
86
(30)
A
31
79
83 42
190
B
7615
6871
MM
MM
YZ
XY
ZR
25 35
5773
25 35
7793
25 35
5773
Detail of section A Detail of section B Detail of section C
M8 x 1.25 Depth 20 19
(Wid
th
acro
ss fl
at)
4-M6 x 1.0 Depth 16
ϕ65h7ϕ22ϕ20h7
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(18.5)
(ϕ10
H7)
ZR
ϕ9.7
ϕ11ϕ11ϕ9.9ϕ9.9
ϕ9.7ϕ9.7ϕ7.6
ϕ9.7ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ
Cross-section of cable carrier
See detailddrawing of C section D +/-0.02
2-ϕ10H7 N-ϕ7 through (C)
8
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550
T 55 110 165 220 275
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
4 axes / ZRFL20
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
281
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 9 8 7
250 6 5 4
350 4 3 1
450 2 1 –
550 1 – –
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 200 100 200 50
Repeatability Note 2(XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm)(R: °) 150 to 1050 150 to 550 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZRFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 55cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRFH A1
MM
Note 1
412.5+/-3 X stroke577.5 5
161.
5
514
0+/-3
Y st
roke
Y st
roke
+ 2
5519
1.5
5
20559.5
L (X stroke + 320)X stroke + 21535
3311
5
136
79125
7924
234
23
53Note 2
51
(50)
(409
)
77.5
(171
)
1154
114KM x 200156200
151
N-M6 x 1.0 Depth 10200139KM x 200131
110
100
13
4120
56.6
56.6
37.5
130
10272
188+
/-2Z
stro
ke
Z st
roke
+ 3
85
55
139.
5
109
86
(111)
7818.5
173
136
(105
)49
83
239 Note 1
64.5
T 111
83 4220
6871
128.5(30)
A
76
242
2190 75
7614
5
7919
0
123.5
B
(152)26
6.52.8
7.2
4.5
9
5.5
MM MM
MM
25 35
5773
25 35
5773
25 35
7793
YZ
XY
ZR
Detail of section A Detail of section B Detail of section C ZR
ϕ9.7
ϕ11ϕ11ϕ9.9ϕ9.9
ϕ9.7ϕ9.7ϕ7.6
ϕ9.7ϕ7.6
Cross-section of cable carrierXY Cross-section of cable carrierYZ
Cross-section of cable carrier
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(18.5)
(ϕ10
H7)
M8 x 1.25 Depth 20 19
(Wid
th
acro
ss fl
at)
4-M6 x 1.0 Depth 16
ϕ65h7ϕ22ϕ20h7
See detaild drawing of C section D +/-0.02
2-ϕ10H7N-ϕ7 through (C)
8
Z-axis: clamped table / moving base type (200W)+R-axis Arm type Cable carrier
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550
T 55 110 165 220 275
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
4 axes / ZRFH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
282
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZRS12 ZRS6
150 3 5
250 3 5
350 3 5
450 3 5
550 3 5
650 3 4
X-axis Y-axisZ-axis: ZRS12
Z-axis: ZRS6
R-axis
Axis construction Note 1 F14H F14 – –
AC servo motor output (W) 200 100 60 100
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.02 +/-0.005
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 12 6 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 1000 500 1020
Moving range (XYZ: mm) (R: °) 150 to 1050 150 to 650 150 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 105cm 15 to 65cm ZRS12 3L: 3.5m A2 ZRS6 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRS A1
X stroke577.5
394+/-3
3811
5
20559.5
L (X stroke + 320)X stroke + 21535
Note 1
161.
5
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
191.
5
136
5
55
34
2351
(50)
(171
)
53Note 2
(409
)
77.5
114KM x 200156200
200139KM x 200131
110
100
151
3641 6.5
2.8
7.2
4.5 9
5.5
B
124
190
79
83
67.5
233
110
42
150
6 115
A
684930
199 6579
125
79
242
64.5
239
T 111
100+
/-2
Note 1
72
300
40
66
83
Z st
roke17
3(1
05)
(168
)13
6
MM
MM
25 35
25 35
7793
5773
XY
YZ
0-0.018
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
Detail of section A Detail of section B Detail of section C
(18.5) (ϕ
10H
7)
ϕ5
ϕ12
M8 x 1.25 Depth 15
ϕ9.7 ϕ9.7ϕ7.6ϕ9.9
ϕ9.9
ϕ11
ϕ11ϕ9.7
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
N-M6 x 1.0 Depth 10
See detaild drawing of C section
D +/-0.02
2-ϕ10H7N-ϕ7 through (C)
Arm type Cable carrier ZR axis integrated type
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
T 55 110 165 220 275 330
Z stroke 150Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
4 axes / ZRS
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
283
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZRS12 ZRS6
150 3 5
250 3 5
350 3 5
450 3 5
550 3 5
650 3 4
X-axis Y-axisZ-axis: ZRS12
Z-axis: ZRS6
R-axis
Axis construction Note 1 F14H F14 – –
AC servo motor output (W) 200 100 60 100
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.02 +/-0.005
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 12 6 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 1000 500 1020
Moving range (XYZ: mm) (R: °) 150 to 850 150 to 650 150 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 85cm 15 to 65cm ZRS12 3L: 3.5m A2 ZRS6 5L: 5mA3 10L: 10mA4
SXYx 4 axes / ZRS A1
MM
MM
X stroke
40
140+
/-3Y
stro
ke
Y st
roke
+ 2
55
55
394+/-3
130
Note 1
44
570
(50) 136
15
L (X stroke + 320)
123.5
5
(30)
123.
5
34 53
5123
Note 2
KM x 200156200
200139KM x 200131
100
110
114151
83
242
79
30 130
64.5
239
(105
)13
6
MA
X. 1
100
100+
/-2
Z st
roke
300
7240
Note 1
173
66
77.5
4283110
233
67.5
178.
5
225
A
99 65
301
3641
9
5.5
0-0.018
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
Detail of section A Detail of section B
(18.5) (ф
10H
7)
ф5
ф12
M8 x 1.25 Depth 15
N-M6 x 1.0 Depth 10
See detaild drawing of B section
D +/-0.02
2-ф10H7N-ф7 through (B)
77.5
79
Arm type Whipover ZR axis integrated type
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke 150 250 350 450 550 650
Z stroke 150
Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
4 axes / ZRS
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
284
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYBx
Controller Operation method
RCX222 Programming / I/O point trace /Remote command / Operation using RS-232C communication
Note. Regenerative unit RG2 is required when the maximum speed exceeds 1250mm/sec.
Y stroke (mm) XY 2 axes
150 14
250 12
350 10
450 8
550 7
X-axis Y-axis
Axis construction Note 1 B14H B14
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.04 +/-0.04
Drive system Timing belt Timing belt
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25
Maximum speed (mm/sec) 1875 1875
Moving range (mm) 150 to 3050 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C RCX222Model Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine
unit Note 1Input/Output selection 1
Input/Output selection 2
A1 15 to 305cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard No entry: None N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking R: RG2 P: PNP N1: OP.DIO24/16
(NPN) Note 2A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
SXYBx 2 axes A1
152104.5
129
Y st
roke
+ 3
38
195.
2
122
144+
/-3
X stroke320+/-3
L (X stroke + 438)
94
136
Y st
roke
12.512.5
12.5
12.5
(50)
GJ
9210
3
79.5
79.5
Note 1
10 168
23
79
3453
51
Note 2
1016
8
(205
)
90.5
(Bet
wee
n kn
ocks
+/-0
.02 )
146
90
134
3270 8 - M6 x 1.0 Depth 16
3.76.5
7.2
4.5
90.5 42 73.5
3294
159
79
73 280
(116
)13
6
9283
184
22152
A
122.5
10085
3525
B
MM
MM
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
2-ϕ6H7 Depth 10
Detail of section A Detail of section B
S
Cross-sectional drawing S-S
S
100
8526.5
M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
Arm type Cable carrier
Note 1. Regenerative unit RG2 is required when the maximum speed on the RCX222 exceeds 1250mm/sec. Note 2. NPN cannot be selected if using CE marking. Note 3. Available only for the master. See P.68 for details on YC-Link system.Note 4. Only when CC or DN or PB was selected for I/O select 1 above, EN can be selected in I/O select 2.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450 550
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
285
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYBx 2 axes A2
3.76.5
7.2
4.5
(Bet
wee
n kn
ocks
+/-0
.02 )
7032
134
90
146
122.5
73.542
90.5
B
18413
6(1
16)
28073
7915
994
Note 253 34
32A
15222
8392
23
51
12.5
12.5
12.5 12.5
Y st
roke
136
94200+/-3 X stroke
144+
/-312
2
195.
2Y
stro
ke +
338
129
(50)
Note 1
79.5
L (X stroke + 438)
103
92
104.5 152 GJ
79.5
168 10
90.516
8
(205
)
1079
MM
MM
10085
3525
8 - M6 x 1.0 Depth 16
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
2-ϕ6H7 Depth 10
Detail of section A Detail of section B
S
Cross-sectional drawing S-S
S
100
85 26.5 M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7:See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
SXYBx 2 axes A4
Note 1
12.5
12.5
12.512.5
Y st
roke
136
94
L (X stroke + 438)
200+/-3X stroke
144+
/-312
219
5.2
Y st
roke
+ 3
3812
9
104.5152G J(50)
79.5
79.5
103
92
16810
90.5(2
05)
168
1079
1522232
184 83
92
7915
994
Note 2
23
51
A
136
(116
)
2805334
122.5
73.542
90.5
B
73
MM
MM
3.76.5
7.2
4.5
(Bet
wee
n kn
ocks
+/-0
.02 )
7032
134
90
146
10085
3525
8 - M6 x 1.0 Depth 16
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
2-ϕ6H7 Depth 10
Detail of section A Detail of section B
S
Cross-sectional drawing S-S
S
100
8526.5M×200200
KN-M6×1.0 Depth 10
C+/-0.02D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85E+/-0.02
5.5
(ϕ10
H7)
18.5
SXYBx 2 axes A3
3.76.5
7.2
4.5
122.5
73.542
90.5
B152
22
18483
92
7915
994
32
136
(116
)
28073
A
12.5
12.5
Y st
roke
136
79.5
144+
/-312
219
5.2
Y st
roke
+ 3
3812
9
12.512.594
320+/-3X stroke
168
Note 1
10
(50)
79.5
L (X stroke + 438)10
392
104.5152G J
90.5 16
8
(205
)
10
Note 2
2351
5334
79
MM
MM
(Bet
wee
n kn
ocks
+/-0
.02 )
7032
134
90
146
10085
3525
8 - M6 x 1.0 Depth 16
Cross-section of cable carrier
ϕ9.7 ϕ8.2ϕ7.6
2-ϕ6H7 Depth 10
Detail of section A Detail of section B
S
Cross-sectional drawing S-S
S
100
8526.5M×200200
KN-M6×1.0 Depth 10
C+/-0.02D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85E+/-0.02
5.5
(ϕ10
H7)
18.5
SXYBx 2 axes

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
286
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240Su 534
SXYBx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 8 7 6
250 6 5 4
350 4 3 2
450 2 1 –
550 1 – –
X-axis Y-axis Z-axis
Axis construction Note 1 B14H B14 F10-BK
AC servo motor output (W) 200 100 100
Repeatability Note 2 (mm) +/-0.04 +/-0.04 +/-0.01
Drive system Timing belt Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25 10
Maximum speed (mm/sec) 1875 1875 600
Moving range (mm) 150 to 3050 150 to 550 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZFModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 305cm 15 to 55cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYBx 3 axes / ZF A1
MM
MM
Note 1
12.5
12.5
12.5 12.5
Y st
roke
136
391+/-3
79.5
X stroke
144+
/-3
122 19
5.2
Y st
roke
+ 3
3812
9
(50)
L (X stroke + 438)104.5 152 GJ
79.5
103
92
16810
3811
5
Note 2
2351
53 34
168
1079
184 83
92
7915
99490
.5 (205
)
32
(420
)
3.76.5
4.5
70 86
4 - M5 x 0.8 Depth 12
110
7.2
73.5
B
190
79
28073
39.5102 4271 94
68
136
(116
)19
5+/-2
Z st
roke
Z st
roke
+ 2
90
55
127
15222 Note 1
A109 65 4.5
133
6190.5
122.5
100 (Between knocks +/-0.02)
MM
85100
35253525
5773
YZ
XY
Detail of section A Detail of section B
2-ϕ5H7 Depth 15
ϕ9.7 ϕ10.1ϕ9.9
ϕ9.7 ϕ8.2ϕ7.6
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
S
Cross-sectional drawing S-S
S
100
8526.5
M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
Arm type Cable carrier Z-axis: clamped base / moving table type (100W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450 550
Z stroke 150 250 350
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
3 axes / ZF
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
287
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYBx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 7 6 5
250 5 4 3
350 3 2 1
450 1 – –
X-axis Y-axis Z-axis
Axis construction Note 1 B14H B14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.04 +/-0.04 +/-0.01
Drive system Timing belt Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25 20
Maximum speed (mm/sec) 1875 1875 1200
Moving range (mm) 150 to 3050 150 to 450 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZFL20Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 305cm 15 to 45cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYBx 3 axes / ZFL20 A1
(50)
12.5
12.5
12.5 12.5
Y st
roke
136
79.5
L (X stroke + 438)
391+/-3 X stroke
144+
/-3
122
195.
2
Y st
roke
+ 3
3812
9
103
92
104.5 152 GJ
90.5
168
Note 1
10
79.5
3811
5
Note 2
2351
53 34
90.516
8
(205
)
1079
(420
)
70110
43
7015
6
70+/
-0.0
2
8
3.7
6.5
7.2
4.5
(76)
Z st
roke
+ 3
85Z
stro
ke24
8+/-214
5
32.5
55
(116
)13
6
28073 102
184 83
92
7915
994
32
15222
Note 1
A
109
122.5
73.5
190
79
B
4271 94
68
133
100 (Between knocks +/-0.02)
MM
MM
MM
85100
35253525
5773
Detail of section A Detail of section B
6 - M5 x 0.8 Depth 12
2-ϕ5H7 Depth 15
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
ϕ9.7 ϕ10.1ϕ9.9
ϕ9.7 ϕ8.2ϕ7.6
S
Cross-sectional drawing S-S
S
100
85 26.5 M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450
Z stroke 150 250 350
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
3 axes / ZFL20
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
288
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYBx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 7 6 5
250 5 4 3
350 3 2 1
450 1 – –
X-axis Y-axis Z-axis
Axis construction Note 1 B14H B14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.04 +/-0.04 +/-0.01
Drive system Timing belt Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25 10
Maximum speed (mm/sec) 1875 1875 600
Moving range (mm) 150 to 3050 150 to 450 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 305cm 15 to 45cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
SXYBx 3 axes / ZFH A1
(50)
12.5
12.5
12.5 12.5
Y st
roke
136
79.5
L (X stroke + 438)
411+/-3 X stroke
144+
/-312
2 195.
2Y
stro
ke +
338
129
103
92
104.5 152 GJ
90.5
168
Note 1
10
79.5
3811
5
Note 2
2351
53 34
90.516
8
(205
)
1079
(420
)
70
6210
011
2
3.76.5
7.2
4.5
15222
184 83
92
7915
994
32
A
Z st
roke
+ 3
85Z
stro
ke
130
10986
151.
5+/-2
55
(116
)13
6
28073
Note 1 102
73.5
4294
13326(152)
71
68
145
76
20
122.5
190
79
B
(Between knocks +/-0.02)
MM
MM
85100
3525 3525
5773
3525
5773
YZ
XY
Detail of section A Detail of section B
4 - M5 x 0.8 Depth 92-ϕ5H7 Depth 8
Cross-section of cable carrierXY
Cross-section of cable carrierZ
Cross-section of cable carrierYZ
ϕ9.7 ϕ10.1ϕ9.9
ϕ9.7 ϕ8.2ϕ7.6
ϕ8.2ϕ7.6
Z
S
Cross-sectional drawing S-S
S
100
85 26.5 M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450
Z stroke 150 250 350
3 axes / ZFH
Arm type Cable carrier Z-axis: clamped table / moving base type (200W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
289
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYBx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 3 5
250 3 5
350 3 5
450 3 4
550 3 3
X-axis Y-axisZ-axis: ZS12
Z-axis: ZS6
Axis construction Note 1 B14H B14 –
AC servo motor output (W) 200 100 60
Repeatability Note 2 (mm) +/-0.04 +/-0.04 +/-0.02
Drive system Timing belt Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25 12 6
Maximum speed (mm/sec) 1875 1875 1000 500
Moving range (mm) 150 to 3050 150 to 550 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZS 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 305cm 15 to 55cm ZS12 3L: 3.5m A2 ZS6 5L: 5mA3 10L: 10mA4
SXYBx 3 axes / ZS A1
12.5 12.5X stroke430+/-3
12.5
12.5
Y st
roke
136 14
4+/-3
122 195.
2Y
stro
ke +
338
129
(50)
L (X stroke + 438)
79.5
104.5 152 GJ
103
92
168
79.5
10
3811
5
Note 1
A
168
10
79
184 83
92
7915
99490
.5 (205
)
32
15222
Z st
roke
300
136
72
(168
)
40
100+
/-2
116
28073
Note 1 66
73.5
C
190
79
94 61
6729
9
110
101
67.5
B
90.5
1508.5124
42244
122.5
Note 2
2351
53 34
3.76.5
7.2
4.5
VIEW A
41 36
MM
MM
MM
XY
YZ
Detail of section B Detail of section C
M8 x 1.25 Depth 15
ϕ5
0-0.018ϕ12
85100
3525
ϕ9.7 ϕ10.1ϕ9.9
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
S
Cross-sectional drawing S-S
S
100
8526.5
M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7:See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450 550
Z stroke 150
3 axes / ZS
Arm type Cable carrier Z-axis shaft vertical type
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
290
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYBx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZRS12 ZRS6
150 3 5
250 3 5
350 3 5
450 3 3
550 2 2
X-axis Y-axisZ-axis: ZRS12
Z-axis: ZRS6
R-axis
Axis construction Note 1 B14H B14 – –
AC servo motor output (W) 200 100 60 100
Repeatability Note 2(XYZ: mm)(R: °) +/-0.04 +/-0.04 +/-0.02 +/-0.005
Drive system Timing belt Timing belt Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 Equivalent to lead 25 12 6 (1/50)
Maximum speed (XYZ: mm/sec)(R: °/sec) 1875 1875 1000 500 1020
Moving range (XYZ: mm)(R: °) 150 to 3050 150 to 550 150 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C 15Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 15 to 305cm 15 to 55cm ZRS12 3L: 3.5m A2 ZRS6 5L: 5mA3 10L: 10mA4
SXYBx 4 axes / ZRS A1
MM
Note 1
12.5
12.5
12.5 12.5
Y st
roke
136
X stroke
144+
/-3
122 195.
2Y
stro
ke +
338
129
430+/-3
(50)
L (X stroke + 438)
79.5
104.5 152 GJ
16879.5
10
103
92
3811
5
Note 2
2351
53 34 41 36
3.77.
24.
5
85100
A
168
1079 90
.5 (205
)
6.5
15222
184 83
92
28073
7915
994
32
Z st
rokeNote 1
300
136
72
(168
)
40
100+
/-2
66
116 73.5
C
190
79
94 61110
67.5
B
90.5
244
150
8.5
124
99 6530
1
42
MM
MM
122.5
25 3525 35
5773
XY
YZ
ϕ9.7 ϕ9.7ϕ9.9 ϕ7.6ϕ11
ϕ9.9ϕ11
Cross-section of cable carrierXY
Cross-section of cable carrierYZ
ϕ9.7
VIEW A Detail of section B Detail of section C
M8 x 1.25 Depth 15
5
0-0.018ϕ12
S
Cross-sectional drawing S-S
S
100
85 26.5 M×200200
KN-M6×1.0 Depth 10
C+/-0.02 D+/-0.02
F-ϕ10H7: See the cross-sectional drawing of S-S.
85 E+/-0.02
5.5
(ϕ10
H7)
18.5
Arm type Cable carrier ZR axis integrated type
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050L 588 688 788 888 988 1088 1188 1288 1388 1488 1588 1688 1788 1888 1988 2088 2188 2288 2388 2488 2588 2688 2788 2888 2988 3088 3188 3288 3388 3488K 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100C 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140D - - - - - - - - - - 240 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960F 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4M 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15 15 16N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36G 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50 0 50J 330 330 430 430 530 530 630 630 730 730 830 830 930 930 1030 1030 1130 1130 1230 1230 1330 1330 1430 1430 1530 1530 1630 1630 1730 1730
Y stroke 150 250 350 450 550
Z stroke 150
4 axes / ZRS
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
291

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
292
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
NXY
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 25
250 21
350 18
450 16
550 13
650 11
X-axis Y-axis
Axis construction Note 1 N15 F14
AC servo motor output (W) 400 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed (mm/sec) 1200 1200
Moving range (mm) 500 to 2000 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
NXY C RCX222 RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
A1 50 to 200cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
NXY 2 axes A1
129+/-3 X stroke83
5538
L
Y st
roke
+ 2
9710
.525
8
K 4.5
(2.5
)(S
crew
hea
d)
145
134.
8Y
stro
ke15
0+/-3
207.
316
05
5
Note 1
7328
8
B 10
118
C
(D)D200
E x 200F-M6 x 1.0 Depth10
C
(G)2-ϕ10H7 Depth17See cross-section C-C. (Note 4) J+/-0.02
G H x 200
I-ϕ7 Depth6See cross-section C-C. (Note 3)
105
200
56100
70
110
(Bet
ween
knoc
ks +/
-0.0
2 )
90
32 8-M6 x 1.0 Depth8
2-ϕ6H7 Depth8
Detail of section A
135
Detail of section B
1.5
3.5
6.5
Cross-section C-C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(17)
(ϕ10
H7)
(6)
(ϕ11
)
(ϕ7)
Cross-section of XY cable carrier
35
70
29
120100
Space for wiring by the user
A
(152
)13
622
012
0
(170
.5)
5.58.3
Arm type Cable carrier
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
293
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
NXY 2 axes A3
X stroke
5
L
4.5
145
134.
8Y
stro
ke15
0+/-3
207.
316
05
5(2
.5)
(Scr
ew h
ead)
Note 1
129+/-383
538
K
Y st
roke
+ 2
9710
.525
873
288
118
10 B
C
C
(G)
56
2-ϕ10H7 Depth17See cross-section C-C. (Note 4)J+/-0.02
(D) D200
GH x 200105
200
E x 200
100
F-M6 x 1.0 Depth10
I-ϕ7 Depth6See cross-section C-C. (Note 3)
Detail of section B
1.5
5.58.3
3.5
6.5
Cross-section C-CDetail of section A
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
70
110
(Bet
ween
kno
cks
+/-0
.02 )
90
32
135
8-M6 x 1.0 Depth8
2-ϕ6H7 Depth8
Cross-section of XY cable carrier
35
70
29
120100
Space for wiring by the user
(152
)13
622
012
0
A
(170
.5)
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
NXY 2 axes

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
294
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 8 8 8
250 8 8 8
350 8 8 8
450 8 7 6
550 5 4 3
650 3 2 1
X-axis Y-axis Z-axis
Axis construction Note 1 N15 F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20
Maximum speed (mm/sec) 1200 1200 1200
Moving range (mm) 500 to 2000 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
NXY C ZFL20Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 50 to 200cm 15 to 65cm 15 to 35cm 3L: 3.5m A3 5L: 5m
10L: 10m
Note 1. Reference of special order: RCX222+SR1-X
NXY 3 axes / ZFL20 A1
X strokeL
K 4.5
145
134.
8Y
stro
ke15
0+/-3
207.
3
Y st
roke
+ 2
9710
.5
160
55
(2.5
)(S
crew
hea
d)
200+/-3
258
55 Note 1
7328
8
B
120
118
10
CF-M6 x 1.0 Depth10
E x 200200
D (D)
C200
105
I-ϕ7 Depth6 See cross-section C-C. (Note 3)
H x 200GJ+/-0.02
56
(G)
100
2-ϕ10H7 Depth17See cross-section C-C. (Note 4)
110
156
870
70
4370
+/-0
.02
6-M5 x 0.8 Depth123-ϕ5H7 Depth15
Cross-section of cable carrier
Cross-section C-C
Dimension in the parentheses( ) is for the Y to Z cable.
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
35 29
120 (100)100 (80)
Space for wiring by the user
50
1.5
5.58.3
3.5
6.5
Detail of section BDetail of section A
(152
)13
6
290+
/-2
Z st
roke
+ 4
27
Z st
roke
80.5
55
(170
.5)
109
187
A
220
70
Note 1
102
(165
)
7168
83 38
69.5 124
(288
)
100 (Between knocks +/-0.02)
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController Note 1 CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
3 axes / ZFL20
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
295
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY 3 axes / ZFL20 A3
Detail of section A
110
156
870
70
4370
+/-0
.02
6-M5 x 0.8 Depth123-ϕ5H7 Depth15
Detail of section B
1.55.5
8.3
3.5
6.5
Cross-section of cable carrier
Cross-section C-C
Dimension in the parentheses( ) is for the Y to Z cable.
(17)
(ϕ10
H7)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
3529
120 (100)
100 (80)
Space for wiring by the user
50
(6)
(288
)(1
65)
7168
8338
69.5124
(152
)13
618
729
0+/-2
Z st
roke
+ 4
27Z
stro
ke80
.5
55
(170
.5)
109
102
220
70
Note 1
C
C
F-M6 x 1.0 Depth10E x 200
200
105H x 200 G
200D(D)
J+/-0.02
56
(G)
100
2-ϕ10H7 Depth17See cross-section C-C. (Note 4)
I-ϕ7 Depth6 See cross-section C-C. (Note 3)
A
7328
812
0
B10
118
X stroke
5 5
L
K4.5
145
134.
8Y
stro
ke15
0+/-3
207.
3
Y st
roke
+ 2
9710
.5
160
55
(2.5
)(S
crew
hea
d)
258
Note 1
200+/-3100 (Between knocks +/-0.02)
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
NXY 3 axes / ZFL20

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
296
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXYNXY C ZFH
Model Cable Combi-nation
X-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 50 to 200cm 15 to 65cm 15 to 35cm 3L: 3.5m A3 5L: 5m
10L: 10m
Note 1. Reference of special order: RCX222+SR1-X
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 13 13 12
250 12 11 10
350 10 9 8
450 8 7 6
550 5 4 3
650 3 2 1
X-axis Y-axis Z-axis
Axis construction Note 1 N15 F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed (mm/sec) 1200 1200 600
Moving range (mm) 500 to 2000 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
NXY 3 axes / ZFH A1
C
C
X stroke
55
L
K 4.5
145
134.
8Y
stro
ke15
0+/-3
207.
3
Y st
roke
+ 2
9710
.5
160
55
7328
8
(2.5
)(S
crew
hea
d)
Note 1
220+/-3
F-M6 x 1.0 Depth10E x 200
200
105
I-ϕ7 Depth6 See cross-section C-C. (Note 3)
H x 200G
200D (D)
J+/-0.02
56
(G)
100
258
120
118
2-ϕ10H7 Depth17See cross-section C-C. (Note 4)
B10 Cross-section of cable carrier
Cross-section C-CDetail of section A
Dimension in the parentheses( ) is for the Y to Z cable.
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
35 29
120 (100)100 (80)
Space for wiring by the user
50
4-M5 x 0.8 Depth9
2-ϕ5H7 Depth8
112
100
62(1
52)
136
(170
.5) (288
)(1
65)
83 38
187
Z st
roke
+ 4
27
102
220
Z st
roke
5
Note 1
68 2071
139.
5+/-2
109105.5 124140
Detail of section B
1.5 5.58.3
3.5
6.5
A 5
70 (Between knocks +/-0.02)
Arm type Cable carrier Z-axis clamped table: moving base type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController Note 1 CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
3 axes / ZFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
297
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY 3 axes / ZFH A3
Detail of section B
5.58.3
3.5
6.5
Cross-section of cable carrier
Cross-section C-CDetail of section A
Dimension in the parentheses ( ) is for the Y to Z cable.
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
35 29
120 (100)100 (80)
Space for wiring by the user
50
4-M5 x 0.8 Depth92-ϕ5H7 Depth8
112
100
62 1.5
2083
(165
)(2
88)
713868
124 140
(152
)13
6
Z st
roke
187
Z st
roke
+ 4
2713
9.5+
/-2
102
55
Note 1
(170
.5)
220
109 105.5
A
4.5
160
55
207.
315
0+/-3
134.
8Y
stro
ke
145
(2.5
)(S
crew
hea
d)L
5
X stroke
Note 1 5
10.5
Y st
roke
+ 2
9725
8
220+/-3
K
C
C
7310
0
(G)
56
J+/-0.02
(D) D200
GH x 200105
200
E x 200
2-ϕ10H7 Depth17See cross-section C-C. (Note 4)
288
120
118
F-M6 x 1.0 Depth10
10
B
I-ϕ7 Depth6 See cross-section C-C. (Note 3)
70 (Between knocks +/-0.02)
X stroke 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The origin of the X axis is set originally as the drawing and it is possible to change it to the R side origin by changing parameters.
Note 3. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 4. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 5. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 6. The M4 taps at both ends of the cable carriage can be used for fixing cables.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
K 650 700 750 800 850 900 950 1000 1050 1100 1150 1200 1250 1300 1350 1400
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
NXY 3 axes / ZFH

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
298
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY-W Arm type Cable carrier Double Y axes specifications
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 25
250 21
350 18
450 16
550 13
650 11
X-axis Y-axis Note 1
Axis construction Note 2 N15D F14
AC servo motor output (W) 400 100
Repeatability Note 3 (mm) +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 4 (Deceleration ratio) (mm) 20 20
Maximum speed (mm/sec) 1200 1200
Moving range (mm) 250 to 1750 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. The same two Y axes are installed and they have same specifications. If axes of individually different stroke are desired, it will be an order-made. In that case, consult YAMAHA.
Note 2. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 3. Positioning repeatability in one direction.Note 4. Leads not listed in the catalog are also available. Contact us for details.
NXY-W 4 axes WA1
55
LX strokeL
RX stroke 129+/-3(322) Note 6
B 10
38 83129+/-3
Y st
roke
+ 2
97
B
7328
811
825
810
.5
Note 1
160
55
150+
/-3Y
stro
ke
145
134 20
6.5
B
CF-M6 x 1.0 Depth10
E x 200200
D (D)
200
105
I-ϕ7 Depth6See cross-section C-C. (Note 2)
H x 200GJ+/-0.02
2-ϕ10H7 Depth17See cross-section C-C. (Note 3)
(G)
56100
C
70
110
(Bet
ween
kno
cks
+/-0
.02 )
90
328-M6 x 1.0 Depth8
2-ϕ6H7 Depth8
Detail of section A
135
Detail of section B
1.5 5.5
8.3
3.5
6.5
Cross-section C-C
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
VIEW Y (Y" is symmetrical with this drawing.)
(152
)13
622
0
60(1
67)
A 35
70
29
120100
Space for wiring by the user
120
Cross-section of XY cable carrier
ϕ9.9ϕ10.1
Y Y"
NXY C WA1Model Cable Combination X-axis stroke Y-axis stroke Cable
25 to 175cm 15 to 65cm Note 1 3L: 3.5m 5L: 5m10L: 10m
Note 1. When the Y-axis stroke is different between the right and left, it will be an order-made.Note 2. Reference of special order: 2 units of RCX222
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController Note 2 CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 3. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 4. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 5. The M4 taps at both ends of the cable carriage can be used for fixing cables.
Note 6. Minimum dimension between LX and RX sliders.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
Y stroke 150 250 350 450 550 650
4 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
299
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY-W
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 8 8 8
250 8 8 8
350 8 8 8
450 8 7 6
550 5 4 3
650 3 2 1
X-axis Y-axis Note 1 Z-axis
Axis construction Note 2 N15D F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 100 200
Repeatability Note 3 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 4 (Deceleration ratio) (mm) 20 20 20
Maximum speed (mm/sec) 1200 1200 1200
Moving range (mm) 250 to 1750 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. The same two Y axes are installed and they have same specifications. If axes of individually different stroke are desired, it will be an order-made. In that case, consult YAMAHA.
Note 2. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 3. Positioning repeatability in one direction.Note 4. Leads not listed in the catalog are also available. Contact us for details.
NXY C WA1 ZFL20Model Cable Combination X-axis
strokeY-axis stroke ZR-axis Z-axis
stroke Cable
25 to 175cm 15 to 65cm Note 1 15 to 35cm 3L: 3.5m 5L: 5m10L: 10m
Note 1. When either one or both of Y-axis or Z-axis stroke is different, it will be an order-made.
Note 2. If you enter “RCX240”, 2 units will be shipped automatically. Reference of special order: 2 sets of RCX222+SR1-X.
NXY-W 6 axes / ZFL WA1L
LX stroke200+/-3
RX stroke 200+/-3
(180) Note 6
258
10.5
Y st
roke
+ 2
97
Note 1
160 15
0+/-3
Y st
roke
145
134 20
6.5
55
5 55 5
Y Y"
BB
73
10
288
118
B
CF-M6 x 1.0 Depth10
E x 200200
D (D)
C200
105
I-ϕ7 Depth6 See cross-section C-C. (Note 2)
H x 200GJ+/-0.02
2-ϕ10H7 Depth17See cross-section C-C. (Note 3)
(G)
56100
156
8
110
7070
4370
+/-0
.02
6-M5x 0.8 Depth123-ϕ5H7 Depth15
Cross-section of cable carrier
Dimension in the parentheses ( ) is for the Y to Z cable.
50100 (80)
120 (100)
2935
Space for wiring by the user
Detail of section A Detail of section B
1.5 5.5
8.3
3.5
6.5
Cross-section C-C
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(152
)13
6Z st
roke
290+
/-2
Z st
roke
+ 4
2780
.5
VIEW Y (Y" is symmetrical with this drawing.)8371
6838
12469.570
Note 1
109
187
55
A
60(1
67)
220
(165
)(2
88)
120
100 (Between knocks +/-0.02)
Arm type Cable carrier Double Y axes specifications
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController Note 2 CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 3. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 4. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 5. The M4 taps at both ends of the cable carriage can be used for fixing cables.
Note 6. Minimum dimension between LX and RX sliders.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
6 axes / ZFL
Z-axis: clamped base / moving table type (200W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
300
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
NXY-W Arm type Cable carrier Double Y axes specifications Z-axis: clamped table / moving base type (200W)
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 13 13 12
250 12 11 10
350 10 9 8
450 8 7 6
550 5 4 3
650 3 2 1
NXY C WA1 ZFHModel Cable Combination X-axis
strokeY-axis stroke ZR-axis Z-axis
stroke Cable
25 to 175cm 15 to 65cm Note 1 15 to 35cm 3L: 3.5m 5L: 5m10L: 10m
Note 1. When either one or both of Y-axis or Z-axis stroke is different, it will be an order-made.
Note 2. If you enter “RCX240”, 2 units will be shipped automatically. Reference of special order: 2 sets of RCX222+SR1-X.
X-axis Y-axis Note 1 Z-axis
Axis construction Note 2 N15D F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 100 200
Repeatability Note 3 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw ϕ15 Ball screw ϕ15 Ball screw ϕ15
Ball screw lead Note 4 (Deceleration ratio) (mm) 20 20 10
Maximum speed (mm/sec) 1200 1200 600
Moving range (mm) 250 to 1750 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. The same two Y axes are installed and they have same specifications. If axes of individually different stroke are desired, it will be an order-made. In that case, consult YAMAHA.
Note 2. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 3. Positioning repeatability in one direction.Note 4. Leads not listed in the catalog are also available. Contact us for details.
NXY-W 6 axes / ZFH WA1
220+/-3 LX stroke
220+/-3RX stroke
L(140) Note 6
5 555 Note 1
258
10.5
Y st
roke
+ 2
97
160
55
150+
/-3Y
stro
ke
145
134 20
6.5
BB
7328
811
8
10
Y Y"
B
CF-M6 x 1.0 Depth10
E x 200200
D (D)
C200
105
I-ϕ7 Depth6 See cross-section C-C. (Note 2)
H x 200GJ+/-0.02
2-ϕ10H7 Depth17See cross-section C-C. (Note 3)
56
(G)
100
Detail of section A
2-ϕ5H7 Depth84-M5 x 0.8 Depth9
Cross-section ofcable carrier
Dimension in the parentheses ( ) isfor the Y to Z cable.
6210
011
2
50100 (80)
120 (100)2935
Space for wiring by the user
Detail of section B
1.5 5.5
8.3
3.5
6.5
Cross-section C-C
(17)
(ϕ10
H7)
(6)
(ϕ7)
(ϕ11
)
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
VIEW Y (Y" is symmetrical with this drawing.)
136
60(1
67)
(152
)13
6
Z st
roke
187
Z st
roke
+ 4
27
102
109
139.
5+/-2
105.5
220
5
A
Note 1 5
2083
(165
)(2
88)
71 3868
69.5 145.5
120
70 (Between knocks +/-0.02)
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController Note 2 CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. When using ϕ7 holes for installation, you must not use a washer, spring washer, etc. in the main unit.
Note 3. When using a ϕ10H7 hole, make sure that the pin does not go into deeper than as shown in the drawing.
Note 4. Use M4 tap of the box next to X axis for the user grounding terminal.
Note 5. The M4 taps at both ends of the cable carriage can be used for fixing cables.
Note 6. Minimum dimension between LX and RX sliders.
L 830 930 1030 1130 1230 1330 1430 1530 1630 1730 1830 1930 2030 2130 2230 2330
D 15 65 15 65 15 65 15 65 15 65 15 65 15 65 15 65
E 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11
F 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24
G 115 165 115 165 115 165 115 165 115 165 115 165 115 165 115 165
H 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10
I 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22
J 620 720 820 920 1020 1120 1220 1320 1420 1520 1620 1720 1820 1920 2020 2120
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350
6 axes / ZFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
301

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
302
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 30
250 30
350 25
450 20
550 20
650 16
X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2(mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4(mm/sec) 1200 1200
Moving range (mm) 250 to 1250 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C RCX222 RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
A1 25 to 125cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
MXYx 2 axes A1
Note 1
5
301+/-3 X stroke8315
77.5
55
5
125
18.5
(179
)
Y st
roke
+ 3
20
(150)
168
87 67
190+
/-3Y
stro
ke
13810 125 21
L (X stroke + 365)
(30)
(M4)Grounding terminal
ϕ29 (Note 2)
5.5
37
(Bet
wee
n kn
ocks
+/-0
.02 )
70
110
124
140
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
135
(345
)97
.5
(50)
8010
3.5
2-ϕ10H7 Depth16
C+/-0.02166.5
20040
132
K 75N-ϕ9 through (B)
M x 200
120
268
136
A
4880
230
41
(162
)299
100
Detail of section A Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
M
M
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Arm type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
303
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx 2 axes A2
Detail of section A Detail of section B
110
(Bet
wee
n kn
ocks
+/-0
.02 )
70124140
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
135 26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
(150)
87Y
stro
keY
stro
ke +
320
6719
0+/-3
(30)
L (X stroke + 365)1254.5
13810
X stroke179+/-383 15
77.5Note 1
168
(179
)
5
5 5
18.5
125
5
(M4)Grounding terminal
120268
41A
80
48
299
37
8010
3.5(162
)13
623
0ϕ29 (Note 2) 5.5
100
97.5
(50)
(345
)
2-ϕ10H7 Depth16C+/-0.02166.5
20040
132
K 75N-ϕ9 through (B)
M x 200
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
MXYx 2 axes A4
MM
X stroke 179+/-38315
77.5Note 1
168
87Y
stro
keY
stro
ke +
320
6719
0+/-3
(30)
(150) L (X stroke + 365)125 4.5
138 10
(179
)
5 55
18.5
125
5
Detail of section A Detail of section B
110
(Bet
wee
n kn
ocks
+/-0
.02 )
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
70124140
8-M6 x 1.0 Depth8
135
2-ϕ6H7 Depth8
97.5
(50)
(345
)
2-ϕ10H7 Depth16C+/-0.02 166.5
20040
132
K75N-ϕ9 through (B)
M x 200(M4)Grounding terminal ϕ29 (Note 2)
120268
41A
(162
)13
6
5.5
230
100
8048
299
3780
103.5
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
MXYx 2 axes A3
110
(Bet
wee
n kn
ocks
+/-0
.02 )
Detail of section A Detail of section B
135
14012470
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
Y st
roke
+ 3
20
(150)
168
876719
0+/-3
Y st
roke
55
(30)
301+/-3X stroke83 15
Note 1
125
18.5
(179
)
138 1012521
77.5
5 5
L (X stroke + 365)120268
136
A 4880
230
41
(162
) 299
100
(M4)
Groundingterminal
ϕ29 (Note 2)
(345
)
97.5 37
(50)
8010
3.5
2-ϕ10H7 Depth16C+/-0.02 166.5
200
40
132
K75N-ϕ9 through (B)
M x 200
5.5MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
MXYx 2 axes

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
304
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 30
250 30
350 25
450 20
550 20
650 16
X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 850 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx S RCX222 RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
A1 25 to 85cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
MXYx 2 axes A1
551
77.5
15 83X stroke301+/-3
5
Y st
roke
190+
/-3 Y st
roke
+ 3
206787
168
(30)
5 5Note 1
1 7310 138
18.5
L (X stroke + 365)
(179
)
125
(M4)
37
5.5ϕ29 (Note 2)
Grounding terminal
103.
580
(50)
97.5
K
132
40200
166.5 C+/-0.022-ϕ10H7 Depth16
M x 200N-ϕ9 through (B)
75
110
(Bet
wee
n kn
ocks
+/-0
.02 )
70124140
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
135
Detail of section A Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
MA
X. 9
00
100
135
165
136
(162
)
230
A
26.5MM
MM
Arm type Whipover
X stroke 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.Note 2. User cable extraction port.
L 615 715 815 915 1015 1115 1215
K 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960
M 2 2 3 3 4 4 5
N 8 8 10 10 12 12 14
Y stroke 150 250 350 450 550 650
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.Speed setting – 80%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
305
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx 2 axes A2
(M4)
136
10023
0
A
135
165
ϕ29 (Note 2) 5.5
37
Grounding terminal
110
(Bet
wee
n kn
ocks
+/-0
.02 )
Detail of section A Detail of section B
135
8-M6 x 1.0 Depth82-ϕ6H7 Depth8
14012470
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
1 5173
77.51583X stroke
10 138
(179
)18
.512
5
Y st
roke
190+
/-3 Y st
roke
+ 3
206787
168
L (X stroke + 365)
179+/-3
(30)
5
5 5
5
Note 1
103.
580
(50)
97.5
20040 75
N-ϕ9 through (B)M x 200 K
2-ϕ10H7 Depth16C+/-0.02166.5
132
(162
)
MA
X. 9
00
MM
MM
MXYx 2 axes A4
51
Y st
roke
190+
/-3Y st
roke
+ 3
2067 87
168
(30)
77.515 83X stroke 179+/-3
5
55 Note 1
1 73
5
10138
(179
)18
.512
5
L (X stroke + 365)
103.
580
(50)
97.5
K 40200
M x 200N-ϕ9 through (B)
75
166.5C+/-0.022-ϕ10H7 Depth16
132
110
(Bet
wee
n kn
ocks
+/-0
.02 )
135
8-M6 x 1.0 Depth82-ϕ6H7 Depth8
14012470
Detail of section A Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
(M4)
136
(162
)
MA
X. 9
00
230
A
135
165
ϕ29 (Note 2)5.5
37
Grounding terminal
100
MM
MM
MXYx 2 axes A3
110
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
135
70124140
Detail of section BDetail of section A
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
77.51583
X stroke 301+/-3
551
5
Y st
roke
190+
/-3Y st
roke
+ 3
2067 87
168
(30)
55 Note 1
173
(179
)18
.512
5
L (X stroke + 365)10138
MA
X. 9
00
100
135
165
136
(162
)23
0
103.
580
(50)
97.5
A
(M4)
37
5.5ϕ29 (Note 2)
Grounding terminal
K 40200
166.5C+/-0.022-ϕ10H7 Depth16
M x 200N-ϕ9 through (B)
75
132
MM
MM
MXYx 2 axes

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
306
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 29
250 29
350 24
450 19
550 19
650 15
X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C IO RCX222 RModel Cable Combination X-axis
strokeY-axis stroke ZR-axis Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
A1 25 to 125cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
MXYx 2 axes / IO A1
Y st
roke
+ 3
20
(150)
168
87 6719
0+/-3
Y st
roke
125
18.5
(179
)
5
X stroke55
5
L (X stroke + 365)
313+/-3
(30)
Note 1
13810
Detail of section A Detail of section B
4-M6 x 1.0
25
11.5
70
6.5
29
4-M5 x 0.8
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
70
(M4)
Grounding terminalϕ29 (Note 2)
5.5
37
(50)
8010
3.5
(345
)
97.5
2-ϕ10H7 Depth16
C+/-0.02166.5
20040
132
K 75N-ϕ9 through (B)
M x 200
120268
4880
41
299
100 A
(168
)
90
37149
ϕ29 (Note 2)
230
(162
)13
6
83
6424
0
12
25
115
1577.5
21 125
MM
MM
Cross-section of cable carrier
7357
25 35
ϕ9.7
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
YZ
XY
YZ
XY
Arm type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 780 780 960 960 1140 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes / IO
Type with Y-axis I/O cable carrier added
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
307
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
ZFL20 ZFL10
150 250 350 150 250 350
150 8 8 8 15 15 15
250 8 8 8 15 15 15
350 8 8 8 15 15 15
450 8 8 8 12 11 10
550 8 8 8 12 11 10
650 8 7 6 8 7 6
X-axis Y-axis Z-axis: ZFL20 Z-axis: ZFL10
Axis construction Note 1 F17 F14H F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 1200 600
Moving range (mm) 250 to 1250 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFL with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx CModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 15 to 65cm ZFL20 15 to 35cm 3L: 3.5m A2 ZFL10 5L: 5mA3 10L: 10mA4
MXYx 3 axes / ZFL20/10 A1
MM
MM
MM
3525 3525
7793
125
(179
)
X stroke
3311
5
372+/-3
Y st
roke
+ 3
20
18.5
13810
55
L (X stroke + 365)
(30)
(150)
Note 1
168
6719
0+/-3
Y st
roke
55
87
(50)
8010
3.5
125 21
(345
)97
.5
(466
)
(M4)Grounding terminal
ϕ29 (Note 2)
5.5
37
M x 200N-ϕ9 through (B)
75K40200
132
166.5 C+/-0.022-ϕ10H7 Depth16
Detail of section A
70
2-ϕ5H7 Depth15
8
6-M5 x 0.8 Depth12
110
43
7015
6
70+/
-0.0
2
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
4880
230
41
299
100(162
)13
6
120268
Note 1
A
109
102
Z st
roke
+ 3
85
Z st
roke
248+
/-2145
55
90.5
123.5
79
71
68
83 15
190
77.5
(76)
100 (Between knocks +/-0.02)
Cross-section of cable carrierCross-section of cable carrier
5773
ϕ9.7 ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZXY
XY
YZ
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZFL20/10
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
308
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 14 13 12
250 14 13 12
350 14 13 12
450 12 11 10
550 12 11 10
650 8 7 6
MXYx C ZFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
X-axis Y-axis Z-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 250 to 1250 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFH with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx 3 axes / ZFH A1
Y st
roke
+ 3
20
(150)
168
87 67
190+
/-3Y
stro
ke5
5
(30)
Note 1
X stroke55
3311
5
392+/-3
125
18.5
(179
)
13810L (X stroke + 365)
(M4)Grounding terminal
ϕ29 (Note 2)5.5
37
(50)
8010
3.5
125 21
(345
)97
.5
(466
)
M x 200N-ϕ9 through (B)
75K40200
132
166.5 C+/-0.02
2-ϕ10H7 Depth16
Detail of section A
2-ϕ5H7 Depth84-M5 x 0.8 Depth9
6210
011
2
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
Z st
roke
+ 3
85Z
stro
ke
145
76
139.
5+/-2
130
4880
230
41
299
100(162
)13
6
120268
109 86
102
55
A
Note 1
26(152) 123.5
83 1577.5
7120
68
7919
0
70 (Between knocks +/-0.02)MM
MM
MM
Cross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Cross-section of cable carrier
3525
5773
ϕ8.2ϕ7.6
3525
7793
Cross-section of cable carrier
ϕ9.7 ϕ10.1ϕ9.9
YZ
YZ Z
XY
XY
Z
Arm type Cable carrier Z-axis: clamped table / moving base type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
309
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx Arm type Cable carrier Z-axis: clamped base / moving table type (200W)+R-axis
MXYx CModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 15 to 65cm ZRFL20 15 to 35cm 3L: 3.5m A2 ZRFL10 5L: 5mA3 10L: 10mA4
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
ZRFL20 ZRFL10
Y stroke (mm)
150 250 350 150 250 350
150 4 4 4 11 11 11
250 4 4 4 11 11 11
350 4 4 4 11 11 11
450 4 4 4 8 7 6
550 4 4 4 8 7 6
650 4 4 4 4 3 2
MXYx 4 axes / ZRFL20/10 A1
Cross-section of cable carrierZR
Cross-section of cable carrierYZCross-section of cable carrierXY
Y st
roke
+ 3
20
(150)
168
87 67
190+
/-3Y
stro
ke
125
18.5
(179
)
13810
5
X stroke55
5
L (X stroke + 365)
424.5+/-3
(30)
Note 1
3311
5
Groundingterminal
ϕ29 (Note 2)
(345
)97
.5
5.5
37
(50)
8010
3.5
12521
(466
)
(M4)
M x 200N-ϕ9 through (B)
75K
132
40200
166.5 C+/-0.022-ϕ10H7 Depth16
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
13
ϕ65h7ϕ22ϕ20h7
4120
Detail of section A
4-M6 x 1.0
56.6
19 (W
idth
ac
ross
flat
)
56.6
37.5
M8 x 1.25Depth20
Depth16
240
Z st
roke
55
168+
/-214
5Z
stro
ke +
132
Z st
roke
+ 3
85
86
123.5
(30)
7824
26
(152)
A
31
77.57168
83 1515 123.5
76
7919
075
120268
4880
230
41
299
100
(162
)13
6
109140
102
Note 1
72
90
110
90.5
MM
MM MM
MM
ZR
YZ
XY
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6
25 35
7793
ϕ9.7 ϕ11ϕ9.9
25 35
5773
ϕ9.7ϕ7.6
2535
5773
8
X-axis Y-axisZ-axis: ZRFL20
Z-axis: ZRFL10
R-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 400 200 200 50
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 1200 600 360
Moving range (XYZ: mm)(R: °) 250 to 1250 150 to 650 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZRFL with higher rigidity as compared with ZRF types which are conventional standard types. When you need the ZRF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRFL20/10
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
310
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx Arm type Cable carrier Z-axis: clamped table / moving base type (200W)+R-axis
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 11 9 8
250 11 9 8
350 11 9 8
450 8 7 6
550 8 7 6
650 4 3 2
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 400 200 200 50
Repeatability Note 2 (XYZ: mm)(R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm)(R: °) 250 to 1250 150 to 650 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZRFH with higher rigidity as compared with ZRF types which are conventional standard types. When you need the ZRF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C ZRFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 15 to 65cm 15 to 35cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
MXYx 4 axes / ZRFH A1
Cross-section of cable carrierZR
Cross-section of cable carrierYZCross-section of cable carrierXY
X stroke55
429.5+/-3
125
18.5
(179
)
(150)
168
13810L (X stroke + 365)
(30)
Y st
roke
+ 3
2087 67
190+
/-3Y
stro
ke5
5
3311
5
Note 1
13
ϕ22ϕ20h7
4120
8
ϕ65h7
Depth1656.6 4-M6 x 1.0
Detail of section A
Depth20 19 (W
idth
ac
ross
flat
)56
.6
37.5
M8 x 1.25
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
(M4)
Groundingterminalϕ29 (Note 2)
5.5
37
(345
)97
.5
125 21
(466
)(50)
8010
3.5
M x 200N-ϕ9 through (B)
75K
132
40200
166.5 C+/-0.02
2-ϕ10H7 Depth16
Z st
roke
+ 3
85
Z st
roke
188+
/-213
013
9.5
102
55
72
Note 1
4880
23029
9
100
(162
)13
6
120268
41
109 8618.5 78 26
(152) 123.5
145
76
(30)128.5
2190
242
A
75
83 15
77.5
71 2068
76
7919
0
MM
MM
MM
MM
XY
ZR
YZ
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6 ϕ9.7 ϕ11
ϕ9.9
25 35
5773
25 35
7793
25 35
5773
ϕ11ϕ9.9
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
311

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
312
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 40
350 40
450 35
550 30
650 30
X-axis Y-axis
Axis construction Note 1 F20 F17
AC servo motor output (W) 600 400
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 250 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C RCX222HP RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
A1 25 to 125cm 25 to 65cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYx 2 axes A1
MM
X stroke100
327+/-3
Y st
roke
+ 4
0019
7.5+
/-320
2
23.5
5
5
Y st
roke
(150)
125
35.5
(213
)
L (X stroke + 417)
1382139
97.5
5
125
Note 1
5
101
(30)
5.5
37
Grounding terminal
ϕ29 (Note 2)
(M4)
(407
)
(50)
114.
180
118.
1
K
162
N-ϕ9 through (B)9572
200
M x 200
C+/-0.02176
2-ϕ10H7: See detaild drawing of B section
Detail of section A Detail of section B
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
(ϕ10
H7)
4.8(14.8)
A12026816.5
488036
1
168
(191
)27
5
115
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Arm type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
313
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx 2 axes
HXYx 2 axes A2
MM
MM
Y st
roke
+ 4
0019
7.5+/-
310
120
2
23.5
5Y
stro
ke
(150)
125
35.5
(213
)
L (X stroke + 417)
138
217+/-3
21
X stroke100
97.5 33125
Note 1 5
5
(30)
Detail of section B
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
(ϕ10
H7)
(14.8)
Detail of section A
5
(M4)
A 120268 16.5
8036
1168
(191
)27
5
115
Grounding terminalϕ29 (Note 2) 5.5
37
48
(407
)(50)
114.
180
118.
1
K
162
N-ϕ9 through (B)9572
200M x 200
C+/-0.02176
2-ϕ10H7: See detaild drawing of B section
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
HXYx 2 axes A4
MM
MM
217+/-3X stroke100
55
Y st
roke
+ 4
0019
7.5+/
-310
120
2
23.5
5
Y st
roke
5(3
0)
Note 1
(150)
35.5
L (X stroke + 417)
138 2197.5
12533
125
(213
)
(407
)
(50)
114.
180
118.
1
K
162
N-ϕ9 through (B)95 72
200M x 200
C+/-0.02 1762-ϕ10H7: See detaild drawing of B section
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
(M4)
16.5
8036
1 168
(191
)27
5
Grounding terminal
37
48
A120268
115
ϕ29 (Note 2)5.5
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Detail of section A Detail of section B
HXYx 2 axes A3
MM
MM
Detail of section A Detail of section B
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
33
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
(ϕ10
H7)
(14.8)
A 120268 16.5
8036
1168
(191
)
275
115
48
Y st
roke
+ 4
0019
7.5+/
-310
120
2
23.5
Y st
roke
(150)
X stroke100
Note 1
327+/-35
55 5
(30) 35
.5
L (X stroke + 417)
13839
2197.5125
125
(213
)
(M4)
(407
) (50)
114.
180
118.
1
KN-ϕ9 through (B)
95 72
200
Grounding terminal
M x 200
C+/-0.02 176
2-ϕ10H7: See detaild drawing of B section
5.5
37
162
ϕ29 (Note 2)
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
314
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 350 450 550
250 20 20 20 20
350 20 20 20 20
450 20 20 19 18
550 18 17 16 15
650 18 17 16 15
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F17 F14H-BK
AC servo motor output (W) 600 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 250 to 1250 250 to 650 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZLModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 25 to 65cm 25 to 55cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
HXYx 3 axes / ZL A1
MM
MM
MM
Y st
roke
+ 4
00
202
23.5
5
5
Y st
roke
125
35.5
(213
)
L (X stroke + 417)
1382139
X stroke
97.5
5
125
Note 1
5(3
0)
918
2
430+/-3
197.
5+/-3
101
(M4)Grounding terminal
ϕ29 (Note 2)
5.5
37
(50)
8011
8.1
(407
)11
4.1
M x 200
200
72N-ϕ9 through (B)
95
162
K
2-ϕ10H7See detaild drawing of B section176 C+/-0.02
1358-M6 x 1.0 Depth8
140
110 (Between knocks +/-0.02)
124
70
2-ϕ6H7 Depth8
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
120
26816.5
488036
1
168
(191
)27
5
115
5
Z st
roke
+ 3
50
Note 1
(176
)
A
240+
/-2
159136
118
Z st
roke
5
125
8021
4
77.58320 100
Cross-section of cable carrier
Cross-section of cable carrier
3525
57
3525
77
93
73
ϕ9.7 ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZ
XY
XY
YZ
Detail of section BDetail of section A
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650
Z stroke 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZL
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
315
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 350 450 550
250 25 25 24 23
350 25 25 24 23
450 20 20 19 18
550 18 17 16 15
650 18 17 16 15
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F17 F14H-BK
AC servo motor output (W) 600 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 5
Maximum speed Note 4 (mm/sec) (°/sec) 1200 1200 300
Moving range (mm) 250 to 1250 250 to 650 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 25 to 65cm 25 to 55cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
HXYx 3 axes / ZH A1
MM
MM
MM
(14.8)
(ϕ10
H7)
4.8
Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
Y st
roke
+ 4
0010
123
.5Y
stro
ke
X stroke430+/-3
197.
5+/-3
(100
)
202
5
5
125
35.5
(213
)
L (X stroke + 417)
1382139
97.5
5
125
Note 1
5(3
0)
(150)
VIEW A
100
143
200
ZM x
200
ZK16
100ZN-M6 x 1.0Depth10
55
(407
)
(50)
8011
8.1
114.
1
(M4)Grounding terminal
ϕ29 (Note 2)
5.5
37
K
162
N-ϕ9 through (B)9572
200M x 200
C+/-0.021762-ϕ10H7See detaild drawing of B section
488036
1
168
(191
)27
5
115
12026816.5
(Scr
ew h
eigh
t)
5
Z st
roke
5
150
Z st
roke
+ 3
6412
4+/-2
(150
)13697
106268
55
Note 1159
(176
)
(2.5
)
A125
8021
4
8320
100
77.5
158.5760
Cross-sectionof cable carrier
Cross-sectionof cable carrier
Cross-sectionof cable carrier
3525 3525
573525
77
93 735773
ϕ9.7 ϕ8.2ϕ7.6
ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZ Z
Z
XY
XY
YZ
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650
Z stroke 250 350 450 550
ZK 100 200 100 200
ZM 1 1 2 2
ZN 10 10 12 12Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZH
Arm type Cable carrier Z-axis: clamped table / moving base type (200W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
316
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 350 450 550
250 12 12 12 12
350 12 12 12 12
450 12 12 12 11
550 10 9 8 7
650 10 9 8 7
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F20 F17 F14H-BK R20
AC servo motor output (W) 600 400 200 200
Repeatability Note 2 (XYZ: mm)(R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm) (R: °) 250 to 1250 250 to 650 250 to 550 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZRLModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 25 to 65cm 25 to 55cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
HXYx 4 axes / ZRL A1
MM
MM
MM
MM
Cross-section of cable carrierZR
Cross-section of cable carrierYZCross-section of cable carrierXY
Y st
roke
+ 4
0010
123
.5Y
stro
ke
X stroke
197.
5+/-3
500+/-35
5
5
Note 1
918
2
202
125
35.5
(213
)
L (X stroke + 417)
1382139
97.5125
5(3
0)
(M4)5.5
Grounding terminalϕ29 (Note 2)
37
(50)
8011
8.1
(407
)11
4.1
M x 200200
72N-ϕ9 through (B)
95
162
K
2-ϕ10H7See detaild drawing of B section
176 C+/-0.02
Detail of section B
(PCD.20)5-M8 x 1.25 Depth20
30
ϕ35h6
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
Detail of section A
12026816.5
488036
1
(191
)27
5
115
Z st
roke
+ 3
5045
7+/-2
136
55
118
(260
)
Note 1
168
Z st
roke
100
165
90
159
8021
4
20
100173
8320
140
133
77.5
225(30)
1257850
313
75
(156)
225
6015
0
A
XY
ZR
YZ
ϕ9.7 ϕ11ϕ9.9
25 35
5773
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6
25 35
7793
ϕ9.7ϕ7.6
25 35
5773
ϕ75h8
Arm type Cable carrier Z-axis: clamped base / moving table type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650
Z stroke 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRL
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
317
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 350 450 550
250 12 12 12 12
350 12 12 12 12
450 12 12 12 11
550 11 10 9 8
650 11 10 9 8
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F20 F17 F14H-BK R20
AC servo motor output (W) 600 400 200 200
Repeatability Note 2 (XYZ: mm)(R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 5 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 300 360
Moving range (XYZ: mm) (R: °) 250 to 1250 250 to 650 250 to 550 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
Model Cable Combi-nation
X-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
A1 25 to 125cm 25 to 65cm 25 to 55cm 3L: 3.5m A2 5L: 5mA3 10L: 10mA4
HXYx C ZRH
HXYx 4 axes / ZRH A1
MM
MMMM
MM
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
Detail of section B
33
Y st
roke
+ 4
0010
120
2
23.5
5
5Y
stro
ke
X stroke
5
Note 1
5(3
0)
197.
5+/-3
(100
)
500+/-3
125
35.5
(213
)
L (X stroke + 417)
1382139
97.5125
(150)
(M4)5.5
37
Grounding terminalϕ29 (Note 2)
(407
)(50)
8011
8.1
114.
1
M x 200200
72N-ϕ9 through (B)
95
162
K
2-ϕ10H7See detaild drawing of B section176 C+/-0.02
Detail of section A
(PCD.20)5-M8 x 1.25 Depth20
30
ϕ35h6
ϕ75h8
12026816.5
4880
361
168
(191
)27
5
115
5Z
stro
ke5
Note 1
90
55
268
97106 136
100
(150
)Z
stro
ke +
364
150
159
(176
)
268+
/-214
4
77.5
125
8021
4
7 (158)
60
A
7831
322
5
75
50
202083
173225 100(30)
Cross-section of cable carrier Cross-section of cable carrier
Cross-section of cable carrier
25 35
25 35
25 35
7793
5773
5773
ϕ7.6ϕ9.7
ϕ9.7ϕ7.6
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6 ϕ9.7 ϕ11
ϕ9.9
ZR
YZXY
XY
YZ
ZR
Arm type Cable carrier Z-axis: clamped table / moving base type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650
Z stroke 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
318
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYLx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 40
350 40
450 35
550 30
650 30
X-axis Y-axis
Axis construction Note 1 F20N F17
AC servo motor output (W) 400 400
Repeatability Note 2 (mm) +/-0.04 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed (mm/sec) 1200 1200
Moving range (mm) 1150 to 2050 250 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
HXYLx C RCX222HP RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
A1 115 to 205cm 25 to 65cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneA2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1A3 10L: 10m CC: CC-LinkA4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYLx 2 axes A1
MM
MM
Detail of section B
5.5
8.6
2.5
3.7
0.5
1.5
274+/-3 X stroke
10 10
55
Y st
roke
197.
5+/-3
202
224.
5
147
Y st
roke
+ 4
00
Note 1
D 152205
L (X stroke + 420)57
10097.5
Note 23453
219.
5
B
5123
2820
200M x 2 0035 K 35
162
N-ϕ9 through (C)
1292-ϕ10H7: See detaild drawing of C section
1320 +/-0.02
Detail of section A Detail of section C
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8)
114
(166
)
120
246 16
828
0
7979
A
196
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Arm type Cable carrier
X stroke 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 1570 1670 1770 1870 1970 2070 2170 2270 2370 2470
D 528 574 620 666 712 758 804 850 896 942
K 100 200 100 200 100 200 100 200 100 200
M 7 7 8 8 9 9 10 10 11 11
N 18 18 20 20 22 22 24 24 26 26
Y stroke 250 350 450 550 650
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
319
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYLx 2 axes
HXYLx 2 axes A2
MM
MM
Detail of section B
5.5
8.6 2.5
3.7
0.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8)
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
1.5
Detail of section A Detail of section C
196
168
280
Note 2
3453
219.
5
B
A
5123
79 120
79
2820
X stroke
10 55
Y st
roke
197.5
+/-3
202
224.
5
147
Y st
roke
+ 4
00
Note 1
D + 35 152205
L (X stroke + 420)57
164+/-3
35
10
10097.5
114
(166
)
200M x 20035 K 35
162
N-ϕ9 through (C)
1292-ϕ10H7: See detaild drawing of C section
1320 +/-0.02
Cross-section of cable carrier
ϕ9.7 ϕ10.1ϕ9.9
25 35
7793
HXYLx 2 axes A4
MM
MM
55
Y st
roke
197.5
+/-3
202
224.
514
7Y
stro
ke +
400
35D + 35152
205
L (X stroke + 420) 57
X stroke 164+/-3100
97.5
1010 Note 1
(166
)11
4
200M x 200 35K35
N-ϕ9 through (C)
1292-ϕ10H7: See detaild drawing of C section
1320 +/-0.02
162
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10
8-M8 x 1.25 Depth25
Detail of section B
5.5
8.6
2.53.7
0.5Detail of section A
1.5
155142120
Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8)
B5334Note 2
196
168
28079
120
79219.
5
2351
A
2028
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
HXYLx 2 axes A3
MM
MM
Detail of section A Detail of section C
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8)
A
7979 12
024
6
196
168
280
274+/-3X stroke
10105Y
stro
ke19
7.5+
/-320
222
4.5
147
Y st
roke
+ 4
00
Note 1
10097.5
5
D152205
L (X stroke + 420) 57
5.5
8.6
2.53.71.5
0.5
Detail of section B
B
219.
5
(166
)11
4
34
Note 223
51 2820
N-ϕ9 through (C)
162
35 K 35M x 200200
1320 +/-0.02
2-ϕ10H7: See detaild drawing of C section
129
53
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
320
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 30
250 30
350 30
450 30
550 30
650 30
750 25
850 20
X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 150 to 850
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C RCX222 RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
G1 25 to 125cm 15 to 85cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneG2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1G3 10L: 10m CC: CC-LinkG4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUS
Note 1.NPN cannot be selected if using CE marking. Note 2.Available only for the master. See P.68 for details on YC-Link system.Note 3.Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
MXYx 2 axes G1X stroke301+/-3
8377.5
Y st
roke
190+
/-3 Y st
roke
+ 3
2067 87
Y st
roke
+ 3
3546
92
(30)
(150)
8-M6 x 1.0Depth8
5
55
5
Note 1
2112510 138
(179
)
18.5
125
L (X stroke + 365)
168
22
(M4)
37
5.5ϕ29 (Note 2)
Groundingterminal
103.
580
(50)
(345
)97
.550
K130 100107
20040
132
K 75N-ϕ9 through (B)
200 x (M-1)(N-2) -ϕ9 through (C)
M x 200
166.5 D+/-0.02 2-ϕ10H7 Depth16
200
Detail of section A
(Bet
wee
n kn
ocks
+/-0
.02 )
Detail of section B
135
2-ϕ6H7 Depth8140124
110
70
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
41
48
A
268120
(162
)10
0
299
230
80
136
79
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480 Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
2 axes
Gantry type Cable carrier
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
321
INFORM
ATION
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx 2 axes
MXYx 2 axes G2
92
Y st
roke
+ 3
35Y
stro
ke +
320
179+/-3 X stroke
87
83
46
Y st
roke
67
77.5
190+
/-3
(30)
168
55
(150)L (X stroke + 365)12513810
18.5
4.5
(179
)12
5
14
5
Note 1
5
Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
Detail of section A
(Bet
wee
n kn
ocks
+/
-0.0
2 )
135
8-M6 x 1.0 Depth82-ϕ6H7 Depth8 140
124
110
70
120268
41A
(M4)
8048
299
3780
103.5
Grounding terminalϕ29 (Note 2) 5.5
(162
)
100
136
230
79 97.5
(50)
(345
)
20040 K 75
N-ϕ9 through (B)M x 200
200 x (M-1)200
100130 K
50
71(N-2) -ϕ9 through (C)
2-ϕ10H7 Depth16D+/-0.02166.5
132
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
MXYx 2 axes G4
Cross-section of cable carrier
92
Y st
roke
+ 3
35Y
stro
ke +
320
L (X stroke + 365)
168
8746
5Y
stro
ke67
519
0+/-3
(30)
(150)
14
5
125 4.5138 10
179+/-3
Note 1
X stroke83
(179
)18
.512
5
77.5
5
Detail of section A
(Bet
wee
n kn
ocks
+/
-0.0
2 )
Detail of section B Detail of section C
135
8-M6 x 1.0 Depth82-ϕ6H7 Depth8 140
124
110
70
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
26.5 12
97.5
(50)
(345
)
20040K75
N-ϕ9 through (B)M x 200
132
50
(N-2) -ϕ9 through (C)
2-ϕ10H7 Depth16
71
166.5D+/-0.02
200 x (M-1)200
100 130K
(M4)
120268
41 A
8048
299
3780
103.5
Grounding terminal ϕ29 (Note 2)5.5
(162
)
100
136
230
79
MM
MM
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
MXYx 2 axes G3
Cross-section of cable carrier
(Bet
wee
n kn
ocks
+/
-0.0
2 )
110
2-ϕ6H7 Depth88-M6 x 1.0 Depth8
135
70124140
Detail of section C
1226.5Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
Detail of section A Detail of section B
(162
)10
0
41
299
230
8048
A
136
268120
79
55
Y st
roke
190+
/-3Y st
roke
+ 3
206787 16
8
Y st
roke
+ 3
3546
92
(30)
(150)
X stroke 301+/-383 77.5
21 125 10138
18.5
L (X stroke + 365)22
(179
)12
5
5 5Note 1
(345
)97
.5
(N-2) -ϕ9 through (C)
2-ϕ10H7 Depth16
103.
5
20040K75
N-ϕ9 through (B)M x 200
(M4)
80
(50)5.5
ϕ29 (Note 2)Groundingterminal
37
50
K 130100200
132
200 x (M-1)
166.5D+/-0.02
107
MM
MM
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
322
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 29
250 29
350 29
450 29
550 29
650 29
750 24
850 19
X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 150 to 850
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C IO RCX222 RModel Cable Combination X-axis
strokeY-axis stroke ZR-axis Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
G1 25 to 125cm 15 to 85cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneG2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1G3 10L: 10m CC: CC-LinkG4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1.NPN cannot be selected if using CE marking. EN: Ethernet EN: Ethernet Note 3
Note 2.Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 2
Note 3.Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
MXYx 2 axes / IO G1
Y st
roke
+ 3
2067 87
Y st
roke
+ 3
3546
(30)10 13818
.5
L (X stroke + 365)22
(150)
X stroke
55
Y st
roke
190+
/-3
168
92
313+/-3
5Note 1
(179
)12
5
(M4)
37
5.5ϕ29 (Note 2)
Groundingterminal
103.
580
(50)
(345
)97
.5
K130 100
200
107 200 x (M-1)(N-2) -ϕ9 through (C)
20040 K 75
N-ϕ9 through (B)M x 200
50
132
166.5 D+/-0.02 2-ϕ10H7 Depth16
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.4-M5 x 0.8
6.5
7025 Use M8 x 1.25 hex socket head bolt
with length head bolt with length (under head) of 25mm or more.
26.5 122911
.570
4-M6 x 1.0
(162
)10
0
41
299
230
8048
136
268120
37149ϕ29 (Note 2)
E
E
79(1
68)
A90
Cross-section E-E
158377.5
12
115
21 125
6424
025
MM
MM
Cross-section of cable carrier
7357
25 35
ϕ9.7
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
YZXY
XY
YZ
Detail of section A Detail of section B Detail of section C
Gantry type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance
of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
2 axes / IO
Type with Y-axis I/O cable carrier added
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
323
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
ZFL20 ZFL10
Y stroke (mm) 150 250 350 150 250 350
150 8 8 8 15 15 15
250 8 8 8 15 15 15
350 8 8 8 15 15 15
450 8 8 8 15 15 15
550 8 8 8 15 15 15
650 8 8 8 15 15 15
750 8 8 8 15 15 15
850 8 8 8 12 11 10
X-axis Y-axis Z-axis: ZFL20 Z-axis: ZFL10
Axis construction Note 1 F17 F14H-BKF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 1200 600
Moving range (mm) 250 to 1250 150 to 850 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFL with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx CModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 15 to 85cm ZFL20 15 to 35cm 3L: 3.5m G2 ZFL10 5L: 5mG3 10L: 10mG4
MXYx 3 axes / ZFL20/10 G1
MM
X stroke
10 138
18.5
L (X stroke + 365)
46
22
(30)(150)
372+/-3
Y st
roke
190+
/-3 Y st
roke
+ 3
2067 87
Y st
roke
+ 3
35
925
516
8
5 5
Note 1
(179
)12
5
3311
5
Detail of section A Detail of section B Detail of section C6-M5 x 0.8 Depth12
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5 12
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
708
2-ϕ5H7 Depth15
7015
6
100 (Between knocks +/-0.02)110
4370
+/-0
.02
(M4)
37
5.5
ϕ29 (Note 2) Groundingterminal
(345
)97
.5
(466
)
103.
580
(50)
125 21
200 x (M-1)107200
100130 K
50
(N-2) -ϕ9 through (C)
M x 200N-ϕ9 through (B)
75K
132
40200
166.5 D +/-0.02 2-ϕ10H7 Depth16
(162
)10
0
41
299
230
8048
136
268120
7924
8+/-2
Z st
roke
Z st
roke
+ 3
85
145
55
90.5
E
E
A
Note 1
102
109
Cross-section E-E
77.5
71
68
83 15
123.5
79
(76)
190
MM
MM
Cross-section of cable carrierCross-section of cable carrier
3525
57
3525
77
93 73
ϕ9.7 ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZXY
YZ
XY
Gantry type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Z stroke 150 250 350
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance
of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZFL20/10
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
324
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 14 13 12
250 14 13 12
350 14 13 12
450 14 13 12
550 14 13 12
650 14 13 12
750 14 13 12
850 12 11 10
X-axis Y-axis Z-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 250 to 1250 150 to 850 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFH with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C ZFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 15 to 85cm 15 to 35cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
MXYx 3 axes / ZFH G1
MM
X stroke
Y st
roke
Y st
roke
+ 3
20
Y st
roke
+ 3
35
392+/-3
55
190+
/-3
67 87168
46
92
(30)
(150)
Note 1
10 138
(179
)
18.5
125
L (X stroke + 365)22
3311
5
5 5
103.
580
(50)
(345
)97
.5
125 21
(466
)
(M4)
37
5.5
ϕ29 (Note 2)Grounding terminal
200 x (M-1)107200
100130 K
50
(N-2) -ϕ9 through (C)
M x 200N-ϕ9 through (B)
75K40200
166.5 D +/-0.02 2-ϕ10H7 Depth16
132
Detail of section A Detail of section B Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
4-M5 x 0.8 Depth92-ϕ5H7 Depth8
112
100
62
26.5 12
E
79
Z st
roke
102
Z st
roke
+ 3
85
55
Note 1
139.
5+/-2
130
E
(162
)
100
41
299
230
8048
136
268120
109 86
90.5
A
Cross-section E-E
77.5
2083 1571
123.5(152)26
68
145
76 7919
0
70 (Between knocks +/-0.02)
MM
MM
Cross-section of cable carrier Cross-section of cable carrierCross-section of cable carrier
3525 3525
57
3525
77
93 735773
ϕ9.7 ϕ8.2ϕ7.6
ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZ ZXY
YZ
XY
Z
Gantry type Cable carrier Z-axis: clamped table / moving base type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Z stroke 150 250 350
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance
of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
325
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Z stroke (mm)
ZRFL20 ZRFL10
Y stroke (mm) 150 250 350 150 250 350
150 4 4 4 11 11 11
250 4 4 4 11 11 11
350 4 4 4 11 11 11
450 4 4 4 11 11 11
550 4 4 4 11 11 11
650 4 4 4 11 11 11
750 4 4 4 11 11 11
850 4 4 4 8 7 6
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
MXYx CModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 15 to 85cm ZRFL20 15 to 35cm 3L: 3.5m G2 ZRFL10 5L: 5mG3 10L: 10mG4
X-axis Y-axisZ-axis: ZRFL20
Z-axis: ZRFL10
R-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 400 200 200 50
Repeatability Note 2 (XYZ: mm)(R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 1200 600 360
Moving range (XYZ: mm)(R: °) 250 to 1250 150 to 850 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZRFL with higher rigidity as compared with ZRF types which are conventional standard types. When you need the ZRF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx 4 axes / ZRFL20/10 G1
MM
X stroke
Y st
roke
+ 3
2067 87
Y st
roke
+ 3
3546
(30)
424.5+/-3
10 13818.5
L (X stroke + 365) 22(150)
(179
)
125
55
Y st
roke
190+
/-3
168
92
3311
5
5 5
Note 1
Detail of section A
Depth20
Depth16
ϕ20h7
13
56.6
ϕ22
19 (W
idth
ac
ross
flat
)56
.6
4-M6 x 1.0ϕ65h7
41
20
8
37.5M8 x 1.25
Detail of section B Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5 12
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
(345
)97
.5
(466
)
12521
(M4)
103.
580
(50)5.5
ϕ29 (Note 2) Groundingterminal
37
M x 200N-ϕ9 through (B)
75K40200
50
(N-2) -ϕ9 through (C)
2-ϕ10H7 Depth16
132
200 x (M-1)107200
100130 K
166.5 D+/-0.02
(162
)10
0
299
230
8048
136
86
Z st
roke
+ 3
85Z
stro
ke +
132
145
168+
/-2Z
stro
ke24
0
55
E
41
268120
140109
E
79
110
72
Note 1
102
90.5
90
31(152) 123.5
Cross-section E-E
A
76
123.5
75
6
15
242
78
(30) 1583
68
71
77.5
190
79
MM
MM MM
Cross-section of cable carrier Cross-section of cable carrier Cross-section of cable carrier
25 35
25 35 25 35
7793
5773
5773
ZRYZXY
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6 ϕ9.7
ϕ7.6ϕ9.7 ϕ11
ϕ9.9
YZ
XY
ZR
Gantry type Cable carrier Z-axis: clamped base / moving table type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Z stroke 150 250 350
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance
of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
4 axes / ZRFL20/10
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
326
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx Gantry type Cable carrier Z-axis: clamped table / moving base type (200W)+R-axis
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 10 9 8
250 10 9 8
350 10 9 8
450 10 9 8
550 10 9 8
650 10 9 8
750 10 9 8
850 8 7 6
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced modelR5
AC servo motor output (W) 400 200 200 50
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm) (R: °) 250 to 1250 150 to 850 150 to 350 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZRFH with higher rigidity as compared with ZRF types which are conventional standard types. When you need the ZRF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance of the ball screw may occur depending on the operation
conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C ZRFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 15 to 85cm 15 to 35cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
MXYx 4 axes / ZRFH G1
MM
X stroke
55
10 138
(179
)
18.5
125
L (X stroke + 365)
Y st
roke
190+
/-3 Y st
roke
+ 3
2067 87
Y st
roke
+ 3
3546
92
22
(30)
(150)
3311
5
429.5+/-3
Note 1
168
5 5
(M4)
103.
580
(50)
37
5.5
ϕ29 (Note 2)Groundingterminal
(345
)97
.5
125 21
(466
)
50
(N-2) -ϕ9 through (C)
M x 200N-ϕ9 through (B)
75K40
200
2-ϕ10H7 Depth16
132
200 x (M-1)107200
100130 K
166.5 D+/-0.02
Detail of section A
Depth16
Depth20 19 (W
idth
ac
ross
flat
)13
56.6
56.6
4-M6 x 1.0ϕ65h7
ϕ22ϕ20h7
41
20
8
37.5M8 x 1.25
Detail of section B Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5 12
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
(162
)10
0
299
230
8048
136
41
268120
79Z
strok
e
Z st
roke
+ 3
85
188+
/-213
090
.513
9.5
109 8618.5 78
102Note 1 72
55
E
E
Cross-section E-E
77.5
(30) 2083 15
7168A
76128.5
123.5(152)26
145
76
75
242
9021
7919
0MM
MMMM
Cross-section of cable carrier Cross-section of cable carrier
25 35
25 35
7793
5773
ϕ9.7 ϕ11ϕ9.9
Cross-section of cable carrier
25 35
5773
ϕ11ϕ9.9
ZRYZXY
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6
XY
YZ
ZR
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250Note 1. The moving range when returning to origin and the stop position when
stopping by the mechanical stopper.Note 2. User cable extraction port.
L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650 750 850
Z stroke 150 250 350
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480Note 3. When the X-axis stroke is longer than 850mm (750mm for Y-axis), resonance
of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Speed setting – 80% 70% 60% 50% 40%
Y-axis 1200 960 780
Speed setting – 80% 65%
4 axes / ZRFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
327

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
328
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 to 1050 50X-axis Y-axis
Axis construction Note 1 F20 F17
AC servo motor output (W) 600 400
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 250 to 1050
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C RCX222HP RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
G1 25 to 125cm 25 to 105cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneG2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1G3 10L: 10m CC: CC-LinkG4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. EN: Ethernet EN: Ethernet Note 3
Note 2.Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 2
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
HXYx 2 axes G1
MM
MM
X stroke100
5 5
327+/-333
125
35.5
(213
)
L (X stroke + 417)
13821 97.5125
608
(Not
e 3)
45(Note 3)
23.5
5
(150)39
5
(30)
Y st
roke
+ 4
0010
1Y
stro
ke +
360
46
197.
5+/-3
202
5
Y st
roke
Note 1
92
(M4)
(407
)(50)
114.
1
8011
8.1
37
Groundingterminal
5.5
ϕ29 (Note 2)
200 x (M-1)200
100K
5016
2
142
(N-2) -ϕ9 through (C)
M x 200
200
72 95N-ϕ9 through (B)
K
130
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
A12026816.5
8036
1
168
(191
)27
5
115
48
Detail of section A
Detail of section B Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
33 12
79
Cross-section of cable carrier25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Gantry type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is
750mm or longer)
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
F 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball
screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960 840 720 600 480
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
329
INFORM
ATION
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx 2 axes
HXYx 2 axes G2
MM
MM
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth108-M8 x 1.25 Depth25
Detail of section A Detail of section CDetail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
155142120
12
(14.8)
(ϕ10
H7)
4.8
33
(M4)
A 120268 16.5
4880
36116
8(1
91)
275
Grounding terminalϕ29 (Note 2) 5.5
3779 115
Y st
roke
+ 4
0019
7.5+/-
3
101
23.5
Y st
roke
Y st
roke
+ 3
6046
(30)
202
5
(150)
592
608
(Not
e 3)
125
35.5
(213
)
217+/-3 X stroke
55100 45 (Note 3)
33
L (X stroke + 417)
1382197.5 33
125
Note 1
5
(50)
114.
180
118.
1
KN-ϕ9 through (B)
9572200
M x 200
162
50(N-2) -ϕ9 through (C)142 K130 100
200200 x (M-1)
2-ϕ10H7: See detaild drawing of B section176 F+/-0.02
(407
)
Cross-section of cable carrier
25 357793
ϕ9.7 ϕ8.2ϕ7.6
HXYx 2 axes G4
m
MM
Cross-section of cable carrier
Y st
roke
+ 4
0010
123
.5Y
stro
ke +
360
46
(N-2) -ϕ9 through (C)142K 130100
200200 x (M-1)
(30)
197.5
+/-3
202
5
Y st
roke
217+/-3X stroke
5
100
92
45 (Note 3)
608
(Not
e 3)
33
(150)
125
35.5
(213
)
L (X stroke + 417)
138 2197.533
125
Note 15
5
5
154
(Bet
ween
kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Detail of section B Detail of section C
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
Detail of section A
(407
) (50)
114.
180
118.
1
(M4)
A12026816.5
4880
361 16
8(1
91)
275
Groundingterminal
29 (Note 2)5.5
7911537
KN-ϕ9 through (B)
95 72
200M x 200
162
50
F+/-0.02 1762-ϕ10H7: See detaild drawing of B section
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
HXYx 2 axes G3
MM
MM
Cross-section of cable carrier
154
(Bet
ween
kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Detail of section A Detail of section B Detail of section C
4.8
(ϕ10
H7)
(14.8)
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
Y st
roke
+ 4
0010
123
.5
5
Y st
roke
Y st
roke
+ 3
6046
(213
)
X stroke100
55
327+/-3
33
608
(Not
e 3)
45 (Note 3)
125
35.5
(150) L (X stroke + 417)
138 2197.5125
197.5
+/-3
202
5
92
5
(30)
39
Note 1
A 120268 16.5
4880
36116
827
5
115
79 (191
) (407
)
(50)
114.
180
118.
1
162
M x 20095 K
F+/-0.02 1762-ϕ10H7: See detaild drawing of B section
200 x (M-1)200
100 130K
50
142
(N-2) -ϕ9 through (C)
200
72N-ϕ9 through (B)
5.5
ϕ29 (Note 2)
Grounding terminal(M4)
37
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
330
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 550
250 to 1050 20
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F17 F14H-BK
AC servo motor output (W) 600 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 250 to 1250 250 to 1050 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZLModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 25 to 105cm 25 to 55cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
HXYx 3 axes / ZL G1
MM
MM
MM
Y st
roke
+ 4
00Y
stro
ke
X stroke
Y st
roke
+ 3
60
430+/-3
35.5
(213
)
L (X stroke + 417)
13839
21125
608
(Not
e 3)
5
5
Note 1
5
92
46
182
9
45(Note 3)
197.
5+/-3
10120
2
23.5
5
(150)
125
97.5
5
(30)
(M4)
(407
)
(50)
8011
8.1
5.5
Groundingterminal
ϕ29 (Note 2)
162
M x 200200
72 95N-ϕ9 through (B)
K
114.
1
2-ϕ10H7: See detaild drawing of B section176 F+/-0.02
200 x (M-1)200
100130 K
50
142
(N-2) -ϕ9 through (C)
37
Detail of section A
2-ϕ6H7 Depth8
70124
110 (Betweenknocks +/-0.02)
140
8-M6 x 1.0 Depth8
135
Detail of section B Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
(14.8)
(ϕ10
H7)
4.8
33 12
Cross-section D-D
125
8021
4
77.58320 100
D
D
12026816.5
79
Note 1
Z st
roke
+ 3
50Z
stro
ke5
118
159
A
5
136
(176
)24
0+/-2
80
168
(191
)27
5
115
361
48
Cross-section of cable carrierCross-section of cable carrier
3525
57
3525
77
93 73
ϕ9.7 ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
XY YZ
XY
YZ
Gantry type Cable carrier Z-axis: clamped base / moving table type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is
750mm or longer)
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
F 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050
Z stroke 250 350 450 550Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball
screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960 840 720 600 480
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZL
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
331
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 550
250 to 1050 30
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F17 F14H-BK
AC servo motor output (W) 600 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 5
Maximum speed Note 4 (mm/sec) 1200 1200 300
Moving range (mm) 250 to 1250 250 to 1050 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 25 to 105cm 25 to 55cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
HXYx 3 axes / ZH G1
MMMM
MM
ZN-M6 x 1.0 Depth10
1655
ZKZM
x 2
0014
310
0
100
200
(M4)
VIEW A
5.5
37
Grounding terminalϕ29 (Note 2)
Y st
roke
+ 4
0019
7.5+
/-3
101
23.5
Y st
roke
Y st
roke
+ 3
60
92
46(20)
202
55
(150)
125
35.5
(213
)
L (X stroke + 417)
13839
21
X stroke
97.5
5
125
Note 1
5
5
(30)
430+/-3
45(Note 3)
608
(Not
e 3)
(407
)(50)
8011
8.1
114.
116
2
M x 200200
72 95N-ϕ9 through (B)
K
2-ϕ10H7: See detaild drawing of B section176 F+/-0.02
(N-2) -ϕ9 through (C)142
50
K130 100200
200 x (M-1)
Detail of section B
Detail of section C
(14.8)
(ϕ10
H7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
12026816.5
8036
1 168
(191
)27
5
115
48
Note 1
D
A
(Scr
ew h
eigh
t)
136268
Z st
roke
97
5
106
150
(150
)12
4+/-2 Z st
roke
+ 3
64
55
(2.5
)
159
(176
)
Cross-section D-D2083
214
80
125
100
60
7 (158)77.5
5
D
33
Cross-section of cable carrierCross-section of cable carrier
3525
57
3525
77
93 73
ϕ9.7 ϕ8.2ϕ7.6
Cross-section of cable carrier
3525
5773
ϕ8.2ϕ7.6
ϕ9.7 ϕ10.1ϕ9.9
YZ ZXY
XY
YZ
Z
Gantry type Cable carrier Z-axis: clamped table / moving base type (200W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is
750mm or longer)
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
F 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050
Z stroke 250 350 450 550
ZK 100 200 100 200
ZM 1 1 2 2
ZN 10 10 12 12
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960 840 720 600 480 Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
332
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 550
250 to 1050 12
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F20 F17 F14H-BK R20
AC servo motor output (W) 600 400 200 200
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 600 360
Moving range (XYZ: mm) (R: °) 250 to 1250 250 to 1050 250 to 550 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZRLModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 25 to 105cm 25 to 55cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
HXYx 4 axes / ZRL G1
MM
MM
MM
MM
125
35.5
(213
)
L (X stroke + 417)
13839
21 97.5125
608
(Not
e 3)
Y st
roke
+ 4
0019
7.5+
/-3
10120
2
23.5
5Y
stro
ke
(150)
5
Note 1
Y st
roke
+ 3
60
92
46
5
(30)
182
9
500+/-345 (Note 3)
5
X stroke5
D (407
)
(50)
8011
8.1
114.
1
142
M x 200200
72 95N-ϕ9 through (B)
K
2-ϕ10H7: See detaild drawing of B section176 F+/-0.02
(N-2) -ϕ9 through (C)
162
50
K130 100200
200 x (M-1)
(PCD.20)
ϕ75h8ϕ35h6
30
5-M8 x 1.25 Depth20
Detail of section A Detail of section B
4.8
(ϕ10
H7)
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
(14.8)
33
Detail of section C
12
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
5.5
37
Grounding terminal(M4)
ϕ29 (Note 2)
VIEW D
79(2
60)
Z st
roke
118
159
90
165
100
457+
/-2Z
stro
ke +
350
E
E
12026816.5
8036
1
168
(191
)27
5
115
48
5 136
5
Note 1
Cross-section E-E
78
100
20
214
80125
77.5
A
133
14015
060
225
(156)
75
2083
173
313
50
225(30)
Cross-section of cable carrier Cross-section of cable carrier Cross-section of cable carrier
25 35
25 35 25 35
7793
5773
5773
ϕ9.7 ϕ11ϕ9.9
ZR
ZRYZXY
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6 ϕ9.7
ϕ7.6
XY
YZ
Gantry type Cable carrier Z-axis: clamped base / moving table type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is
750mm or longer)
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
F 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050
Z stroke 250 350 450 550Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball
screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960 840 720 600 480
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRL
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
333
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 550
250 to 1050 20
X-axis Y-axis Z-axis R-axis
Axis construction Note 1 F20 F17 F14H R20
AC servo motor output (W) 600 400 200 200
Repeatability Note 2 (XYZ: mm) (R: °) +/-0.01 +/-0.01 +/-0.01 +/-0.0083
Drive system Ball screw Ball screw Ball screw Harmonic gear
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 5 (1/50)
Maximum speed Note 4 (XYZ: mm/sec) (R: °/sec) 1200 1200 300 360
Moving range (XYZ: mm) (R: °) 250 to 1250 250 to 1050 250 to 550 360
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZRHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
G1 25 to 125cm 25 to 105cm 25 to 55cm 3L: 3.5m G2 5L: 5mG3 10L: 10mG4
HXYx 4 axes / ZRH G1
MM
MMMM
MM
Y st
roke
+ 4
0010
123
.5
125
35.5
(213
)
X stroke5 5
Y st
roke
+ 3
60
92
46(20)500+/-3
608
(Not
e 3)
197.
5+/-3
202
55
Y st
roke
(150)L (X stroke + 417)
13839
21 97.5125
Note 1
(30)
45(Note 3)
5
(M4)
5.5
37
ϕ29 (Note 2)
Grounding terminal
(50)
8011
8.1
(407
)
M x 200200
72 95N-ϕ9 through (B)
K
114.
1
200 x (M-1)200
100130 K
5016
2
142(N-2) -ϕ9 through (C)
2-ϕ10H7: See detaild drawing of B section176 F+/-0.02
(PCD.20)
Detail of section A
ϕ75h8ϕ35h6
30
5-M8 x 1.25 Depth20
Detail of section B Detail of section C
(14.8)(ϕ
10H
7)
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
12026816.5
8036
1
168
(191
)27
5
115
48
Z st
roke
Z st
roke
+ 3
64(1
50)
268+
/-2(176
)79
D
55
Note 1
144
136
159
150
55
10697
268
100
90 D
Cross-section D-D
17383 202050
214
80125
75
22531
378
A
77.5
100225
60
7 (158)
(30)
Cross-section of cable carrier Cross-section of cable carrier Cross-section of cable carrier
25 35
25 35 25 35
7793
5773
5773
ϕ7.6ϕ9.7
ϕ9.7ϕ7.6
ϕ9.7 ϕ11ϕ9.9
XY YZ ZR
XY
YZ
ZR
ϕ9.7ϕ9.9ϕ11
ϕ9.7ϕ7.6
Gantry type Cable carrier Z-axis: clamped table / moving base type (200W)+R-axis
RCX340-4Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is
750mm or longer)
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
F 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050
Z stroke 250 350 450 550
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960 840 720 600 480 Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60% 50% 40%
4 axes / ZRH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
334
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYLx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 to 1050 50X-axis Y-axis
Axis construction Note 1 F20N F17
AC servo motor output (W) 400 400
Repeatability Note 2 (mm) +/-0.04 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 1150 to 2050 250 to 1050
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYLx C RCX222HP RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
G1 115 to 205cm 25 to 105cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneG2 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 1G3 10L: 10m CC: CC-LinkG4 DN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYLx 2 axes G1
MM
MM
Detail of section C
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8) 274+/-3 X stroke
224.
5
10033
Y st
roke
+ 3
604697.5
45(Note 3)
154
(Bet
wee
n kn
ocks
+/-0
.02 )10 10
55
197.
5+/-3
202
147
Y st
roke
+ 4
00
Note 1
E 152205
L (X stroke + 420)57
92
608
(Not
e 3)
Detail of section D
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
12
Y st
roke
B
219.
5
53 34Note 2
235128
20
200M x 20035 K 35
162
N-ϕ9 through (C)
114
(166
)
F-ϕ9 through (D)
(K-100)130 100
200(M-1) x 20089
50
51
1292-ϕ10H7: See detaild drawing of C section
1320 +/-0.02
2-ϕ6H7 Depth10155142
8-M8 x 1.25 Depth25120
Detail of section B
5.5
8.6 2.5
3.71.5
0.5
Detail of section A
120
246
196
168
280
7979
79
A
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Gantry type Cable carrier
X stroke 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. Dimension of reinforced bracket (To be installed when the Y stroke is 750mm or
longer)
L 1570 1670 1770 1870 1970 2070 2170 2270 2370 2470
E 528 574 620 666 712 758 804 850 896 942
K 100 200 100 200 100 200 100 200 100 200
M 7 7 8 8 9 9 10 10 11 11
N 18 18 20 20 22 22 24 24 26 26
F 14 16 16 18 18 20 20 22 22 24
Y stroke 250 350 450 550 650 750 850 950 1050Note 4. When the Y-axis stroke is longer than 850mm, resonance of the ball screw may occur
depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
Y-axis 1200 960 840 720
Speed setting – 80% 70% 60%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
335
INFORM
ATION
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYLx 2 axes
HXYLx 2 axes G2
MM
MM
X stroke
Y st
roke
197.5
+/-3
224.
514
7Y
stro
ke +
400
164+/-3100
3397.5 92
Y st
roke
+ 3
60
45 (Note 3)
608
(Not
e 3)
10 55
202
Note 1
E + 35 152205
L (X stroke + 420)57
35
10
Detail of section B
5.5
8.6
2.53.71.5
0.5
Detail of section A15
4 (B
etw
een
knoc
ks +
/-0.0
2 )
2-ϕ6H7 Depth10155142
8-M8 x 1.25 Depth25 120
196
168
280
79
Note 2
3453
219.
5
B
5123
79 120
79
2820
A
Detail of section C
(14.8)
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
(ϕ10
H7)
4.8
Detail of section D
12Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
5189 (M-1) x 200200
100130
(K-100)
50
F-ϕ9 through (D)
N-ϕ9 through (C)
162
35KM x 20035200
1320 +/-0.022-ϕ10H7: See detaild drawing of C section
129
114
(166
)
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
HXYLx 2 axes G4
MM
MM
Cross-section of cable carrier
X stroke
55
Y st
roke
197.5
+/-3
202
224.
514
7Y
stro
ke +
400
164+/-3100
33 97.592
Y st
roke
+ 3
60
45 (Note 3)
608
(Not
e 3)
46
1010 Note1
E + 35152L (X stroke + 420) 57
35205
20035M x 200K35
162
N-ϕ9 through (C)
F-ϕ9 through (D)
50
(K-100)130100
200(M-1) x 200 8951
1320 +/-0.02 1292-ϕ10H7: See detaild drawing of C section
Detail of section B
5.5
8.6
2.53.71.5
0.5Detail of section A
Detail of section C
Detail of section D
154
(Bet
ween
kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
12Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
(14.8)
(ϕ10
H7)
4.8
7912
0
A
B
79219.
5
5334Note 2
2351
196
280
168
2028
79(166
)11
4
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
HXYLx 2 axes G3
Cross-section of cable carrier
Detail of section B
5.5
8.6
2.53.71.5
0.5
Detail of section A
154
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth10 155142
8-M8 x 1.25 Depth25 120
Detail of section C Detail of section D
(14.8)
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
12Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 25mm or more.
(ϕ10
H7)
4.8
A
(166
)11
4
7979 12
024
6
196
168
280
79
200M x 200 35K35
N-ϕ9 through (C)
F-ϕ9 through (D) 50(K-100)130100
200(M-1) x 200 8951
1292-ϕ10H7: See detaild drawing of C section
1320 +/-0.02
202851
23
Note 234 53
219.
5
274+/-3X stroke
101055
Y st
roke
197.5
+/-3
202
224.
514
7Y
stro
ke +
400
Note 1
E152 205
L (X stroke + 420) 57
1003392
Y st
roke
+ 3
6046
B
97.545 (Note 3)
608
(Not
e 3)
162
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
MM
MM

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
336
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 15
250 14
350 13
X-axis Y-axis
Axis construction Note 1 F14H F14
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 150 to 850 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S RCX222Model Cable Combination X-axis stroke Note 1 Y-axis stroke Note 1 Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
M1 15 to 85cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 2 No entry: NoneM3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
SXYx 2 axes M1
(When at the origin position)10
5
X stroke
40Note 1
194+/-383
5
Y stroke + (112+/-3)
122.
514
.8
27
55
130
Y st
roke
Y st
roke
+ 2
55
77.5
1090
170
136
61
(30)
5.58.6
2.5
3.7
2.3
Detail of section A
(Bet
wee
n kn
ocks
+/-0
.02 )
Detail of section C
130
11060
70
100
32
44
50 12-M6 x 1.0 through(Board thickness 10)
27
5.5
9
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
(ф10
H7)
(18.5)
Detail of section B
2-ф6H7 Depth6
51
Note 2
23
34 53
173
136
83 A
MA
X. 1
000
(105
)
M x 200 K200
157N-M6 x 1.0 Depth10
1132-ф10H7See detaild drawing of C section
100
110
132200
M x 200 K
N-ф7 through (C)
138151 D+/-0.02
MM
MM
70
16 B
10
25
77.5
79
(50) L (X stroke + 320)
Moving arm type Whipover
Note 1. The total of the X and Y strokes should be 1000mm or less.Note 2. NPN cannot be selected if using CE marking. Note 3. Available only for the master. See P.68 for details on YC-Link system.Note 4. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
337
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx 2 axes
SXYx 2 axes M3
(When at the origin position)
10
5
27
X stroke
40Note 1
194+/-383Y stroke + (112+/-3)
5
122.
514
.8
77.5 61
(30)
55
130
Y st
roke
170
Y st
roke
+ 2
55
136
1090
51
53Note 2
23
34
M x 200K200
157N-M6 x 1.0 Depth10
1132-ф10H7See detaild drawing of C section
100
110
132200
M x 200K
N-ф7 through (C)
138151D+/-0.02
173
136
MA
X. 1
000
(105
)
83A
Detail of section B
2.3
Detail of section A Detail of section C
4427
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
9
(ф10
H7)
(18.5)2-ф6H7 Depth6
70
100
32
5012-M6 x 1.0 through(Board thickness 10)
(Bet
wee
n kn
ocks
+/-0
.02 )
60110
130 5.5
8.6
3.7
2.5
MM
MM
70
16B
10
25
77.5
79
L (X stroke + 320)
(50)
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Y stroke Note3 150 250 350
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
338
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 9 8 7
250 8 7 6
350 7 6 5
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14 F10-BK
AC servo motor output (W) 200 100 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 600
Moving range (mm) 150 to 850 150 to 350 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S ZFModel Cable Combi-
nation X-axis stroke Note 1 Y-axis stroke Note 1 ZR-axis Z-axis stroke Cable
M1 15 to 85cm 15 to 35cm 15 to 35cm 3L: 3.5m M3 5L: 5m
10L: 10m
SXYx 3 axes / ZF M1
MM (Whe
n at
the
orig
in p
ositio
n)
10
5
X stroke
40
194+/-383
170Y
stro
ke +
255
5
136
(30)
Y st
roke
Note 1
Y st
roke
+ (1
83+/
-3)
122.
514
.8 130
77.561
55
90
Detail of section A
2-ф5H7 Depth15
110
4-M5 x 0.8 Depth12
8670
51
53Note 2
23
34
Detail of section B
5.58.6
2.5 3.7
2.3
Detail of section C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ф10
H7)
(18.5)
173
136
83
MA
X. 1
000
(105
)
71
68
40.5
Z st
roke
Z st
roke
+ 3
50
255+
/-2
65 (6.5)
187
4.5
55
Note 1
60.5 15
A
ф37
109
138
113N-M6 x 1.0 Depth10
N-ф7 through (C)
157
KM x 200200
200
132
KM x 200
110
100
151 D+/-0.02
2-ф10H7 See detaild drawing of C section
100 (Between knocks +/-0.02)
102
MM
MM
70
16 B
10
25
77.5
79
(50) L (X stroke + 320)
Z-axis: clamped base / moving table type (100W)
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Note 1. The total of the X and Y strokes should be 1000mm or less.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Z stroke 150 250 350
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZF
Moving arm type Whipover
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
339
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYx Z-axis: clamped base / moving table type (200W) Moving arm type Whipover
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 8 8 7
250 8 7 6
350 7 6 5
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20
Maximum speed Note 4 (mm/sec) 1200 1200 1200
Moving range (mm) 150 to 850 150 to 350 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S ZFL20Model Cable Combi-
nation X-axis strokeNote 1 Y-axis strokeNote 1 ZR-axis Z-axis stroke Cable
M1 15 to 85cm 15 to 35cm 15 to 35cm 3L: 3.5m M3 5L: 5m
10L: 10m
SXYx 3 axes / ZFL20 M1
10
5
X stroke
40
194+/-383
122.
514
.8
(Whe
n at
the
orig
in p
ositio
n)17
0Y st
roke
+ 2
55
136
(30)
Y st
roke
Y st
roke
+ (1
83+/
-3)
77.561
130
5
5
Note 1
5
90
51
53Note 2
23
34
N-M6 x 1.0 Depth10
N-ф7 through (C)
200 2-ф10H7 See detaild drawing of C section
138 KM x 200200
132151 D+/-0.02
110
100
Detail of section A
100 (Between knocks +/-0.02)
70
2-ф5H7 Depth15
8
6-M5 x 0.8 Depth12
110
43
7015
6
70+/
-0.0
2
Detail of section B
5.5
8.62.
5
3.7
2.3
Detail of section C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ф10
H7)
(18.5)
102
Z st
roke
+ 3
85Z
stro
ke24
8+/-214
55
5
33.5
7168
A
109
10
ф37
Note 1
(76)
85
30
173
136
83
MA
X. 1
000
(105
)
MM
MM
MM
70
16 B
10
25
77.5
79
L (X stroke + 320)
(50)
113 157KM x 200
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534 Note 1.The total of the X and Y strokes should be 1000mm or less.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
A 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Z stroke 150 250 350
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZFL20
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
340
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYx
Controller Operation method
RCX340RCX240S-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 9 8 7
250 8 7 6
350 7 6 5
X-axis Y-axis Z-axis
Axis construction Note 1 F14H F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4 (mm/sec) (°/sec) 1200 1200 600
Moving range (mm) 150 to 850 150 to 350 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S ZFHModel Cable Combi-
nation X-axis strokeNote 1 Y-axis strokeNote 1 ZR-axis Z-axis stroke Cable
M1 15 to 85cm 15 to 35cm 15 to 35cm 3L: 3.5m M3 5L: 5m
10L: 10m
SXYx 3 axes / ZFH M1
MM
MM
MM
170Y
stro
ke +
255
5
136
Y st
roke
Note 1
Y st
roke
+ (1
93+/
-3)
(Whe
n at
the
origi
n po
sition
)(3
0)
194+/-3 X stroke
540
122.
514
.8 130
55
51
53Note 2
23
34
M x 200 K
132
200
200M x 200 K
157
N-ф7 through (C)
N-M6 x 1.0 Depth10113
138151 D+/-0.02
2-ф10H7See detaild drawing of C section
100
110
Detail of section A
6210
011
2
2-ф5H7 Depth84-M5 x 0.8 Depth9
Detail of section B
5.58.6
2.5 3.7
2.3
Detail of section C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ф10
H7)
(18.5)
173
83
(105
)M
AX
. 120
0
Z st
roke
+ 3
85Z
stro
ke
55
137+
/-2
10 7168
(30)
Note 1
136
79
119
A
10961
1013
8
102110
130
70 (Between knocks +/-0.02)
70
16B
10
25
77.5
79
L (X stroke + 320)
77.5
(50)
10 83
Z-axis: clamped table / moving base type (200W) Moving arm type Whipover
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240S RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534 Note 1. The total of the X and Y strokes should be 1000mm or less.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350
Z stroke 150 250 350 Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZFH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
341
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240S u 534
SXYx
Controller Operation method
RCX340RCX240S
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 to 350 3 5
X-axis Y-axis Z-axis: ZS12 Z-axis: ZS6
Axis construction Note 1 F14H F14 –
AC servo motor output (W) 200 100 60
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.02
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 12 6
Maximum speed Note 4 (mm/sec) 1200 1200 1000 500
Moving range (mm) 150 to 850 150 to 350 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S 15Model Cable Combi-
nation X-axis strokeNote 1 Y-axis strokeNote 1 ZR-axis Z-axis stroke Cable
M1 15 to 85cm 15 to 35cm ZS12 3L: 3.5m M3 ZS6 5L: 5m
10L: 10m
SXYx 3 axes / ZS M1
(Whe
n at
the
orig
in p
ositio
n)17
0
Y st
roke
+ 2
55
5
136
Y st
roke
5
Note 1
5
Y st
roke
+ (2
22+/
-3)
(30)
194+/-3 X stroke
54083
122.
514
.8 130
51
53 Note 2
23
34
N-M6 x 1.0 Depth10
N-ф7 through (C)
113 157200
KM x 2002-ф10H7 See detaild drawing of C section
138 KM x 200200
132151 D+/-0.02
110
100
173
136
(105
)M
AX
. 110
079
119
83
11067.5
75
299
67
150
A
101
7240
Z st
roke
300
6 N
ote
6 (N
ote
1) N
ote
100+
/-2
Detail of section C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
(ф10
H7)
(18.5)
9
Detail of section B
5.5
8.63.
72.
3
Detail of section A
2.5
Depth15
41 36
ф12 0-0.018
ф5
M8 x 1.25
MM
MM
70
16B
10
25
77.5
79
(50) L (X stroke + 320)
Z-axis shaft vertical type Moving arm type Whipover
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240SController CE Marking Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Note 1. The total of the X and Y strokes should be 1000mm or less.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 960
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350
Z stroke 150 Note 3. The total of the X and Y strokes should be 1000mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
3 axes / ZS
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
342
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 to 550 20X-axis Y-axis
Axis construction Note 1 F17 F14H
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C RCX222 RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
M1 25 to 125cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneM3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. NPN cannot be selected if using CE marking. Note 2.Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
MXYx 2 axes M1
(When at the origin position)
234+/-3
Y stroke + (140+/-3)
Note 1
4083
55
X stroke10
168
Y st
roke
+ 3
2030
Y st
roke
210
125(150)L (X stroke + 365)
61
24
77.5
(30)
125
18.5
(179
)
55
10 138
10
90
(M4)(Note 2)
Grounding terminalϕ29
5.5
8010
3.5
37
135
165
(50)
(345
)97
.5
166.5 C+/-0.022-ϕ10H7 Depth16
K40200
M x 200N-ϕ9 through (B)
75
132
2-ϕ6H7 Depth6
70
100
32
5012-M6 x 1.0 through(Board thickness 10)
(Bet
wee
n kn
ocks
+/-0
.02 )
60 110
130
Detail of section A
44 27
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
MA
X. 9
00
488029
923
013
6(1
62)
120
2683
100 A
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Moving arm type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
343
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx 2 axes
MXYx 2 axes M3
2-ϕ6H7 Depth6
70
100
32
50 12-M6 x 1.0 through(Board thickness 10)
Detail of section A
(Bet
wee
n kn
ocks
+/-0
.02 )
60 110
130
4427
Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
(When at the origin position)
234+/-3
Y stroke + (140+/-3)
Note 140
83
5 5
X stroke10
168
Y st
roke
+ 3
2030
Y st
roke
210
55
1013810
125
18.5
(179
)
125
L (X stroke + 365)
61
24
77.5
(30)
(150)
90
120
268 3
MA
X. 9
00
48 8029
9
230
136
(162
)
100A
K
132
40
200
166.5C+/-0.02
2-ϕ10H7 Depth16
M x 200N-ϕ9 through (B)
75
(345
)97
.5
135
165
(50)
8010
3.5
5.5
37
(M4)(Note 2)
Grounding terminalϕ29
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
344
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Z stroke (mm)
ZFL20 ZFL10
Y stroke (mm)
150 250 350 150 250 350
150 to 550 8 8 8 12 11 10
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
X-axis Y-axisZ-axis: ZFL20
Z-axis: ZFL10
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 20 10
Maximum speed Note 4 (mm/sec) 1200 1200 1200 600
Moving range (mm) 250 to 1250 150 to 550 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFL with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx CModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
M1 25 to 125cm 15 to 55cm ZFL20 15 to 35cm 3L: 3.5m M3 ZFL10 5L: 5m
10L: 10m
MXYx 3 axes / ZFL20/10 M1
(Whe
n at
the
orig
in p
ositio
n)
234+/-3
168
Y st
roke
+ 3
20
Y st
roke
+ (2
11+/
-3)
Y st
roke
(150)
210
Note 1
4083
55
X stroke
55
125
L (X stroke + 365)
61
24
77.5
(30)
125
18.5
(179
)
10 138
90
(M4)(Note 2)
8010
3.5
Grounding terminalϕ29
5.5
37
135
165
(345
)97
.5
(50)
M x 200N-ϕ9 through (B)
75K
132
40200
166.5 C+/-0.02
2-ϕ10H7 Depth16
Detail of section A
100 (Between knocks +/-0.02)
70
43
110
8
6-M5 x 0.8 Depth122-ϕ5H7 Depth15
7015
6
70+/
-0.0
2
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
120
2683
MA
X. 9
00
488029
9
230
136
(162
)
100
A
145
55
248+
/-2
7168
Z st
roke
+ 3
85Z
stro
ke
10
90.5
(76)
Note 1 ϕ37
102
10930
85
MM
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Z-axis: clamped base / moving table type (200W) Moving arm type Cable carrier
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZFL20/10
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
345
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 to 550 12 11 10
MXYx C ZFHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
M1 25 to 125cm 15 to 55cm 15 to 35cm 3L: 3.5m M3 5L: 5m
10L: 10m
X-axis Y-axis Z-axis
Axis construction Note 1 F17 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2(mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 10
Maximum speed Note 4(mm/sec) 1200 1200 600
Moving range (mm) 250 to 1250 150 to 550 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZFH with higher rigidity as compared with ZF types which are conventional standard types. When you need the ZF type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx 3 axes / ZFH M1
MM
MM
MM
234+/-3
168
Y st
roke
+ 3
20Y
stro
ke +
(221
+/-3
)(W
hen
at th
e or
igin
posit
ion)
Y st
roke
125(150)
210
Note 1
4083
55
X stroke
L (X stroke + 365)
6124
77.5
(30)
55
125
18.5
(179
)
10 138
90
20040
132
K 75N-ϕ9 through (B)
M x 200
166.5 C+/-0.022-ϕ10H7 Depth16
(Note 2)
135
8010
3.5
165
Groundingterminal(M4)
(345
)
ϕ29
5.5
97.537
(50)
4-M5 x 0.8 Depth92-ϕ5H7 Depth8
112
100
62
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
138
61
10
109
A
130
110102
55
Z st
roke
+ 3
8513
7+/-2
Z st
roke
(30)
106871
Note 1
488029
923
0(1
62)
MA
X. 1
200
1202683
136
100
70 (Between knocks +/-0.02)
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Detail of section A Detail of section B
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke Note 3 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
D 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke Note 3 150 250 350 450 550Note 3. The total of the Y and Z strokes should be 800mm or less.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Z stroke 150 250 350
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZFH
Z-axis: clamped table / moving base type (200W) Moving arm type Cable carrier
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
346
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 to 650 30
X-axis Y-axis
Axis construction Note 1 F20 F17
AC servo motor output (W) 600 400
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 250 to 1250 250 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C RCX222HP RModel Cable Combination X-axis stroke Y-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
M1 25 to 125cm 25 to 65cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneM3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYx 2 axes M1
MM
MM
(Whe
n at
the
orig
in p
ositi
on)
Y st
roke
+ 3
65
202
Y st
roke
240
32.5
Y st
roke
(157
.5+/
-3) 4-M8 x 1.25 through
(Board thickness 20)
100X stroke262+/-3
4555
33
Note 1
55
(150)
97.5
L (X stroke + 417)32 12561
(30)
125
35.5
(213
)
13821
9020
(M4)
ϕ29 (Note 2)Groundingterminal5.5
37
(50)
8011
8.122
613
5
(407
)11
4.1
M x 200200
72 95N-ϕ9 through (B)
162
K
C+/-0.02176 2-ϕ10H7: See detaild drawing of B section
Detail of section A
2-ϕ6H7 Depth6 78
133
63
120
(Bet
wee
n kn
ocks
+/-0
.02 )
8036
116
8(1
91)
275
115
33
MA
X. 1
100
120268
48
Detail of section
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
33
4.8
(ϕ10
H7)
(14.8)
A
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Moving arm type Cable carrier
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
347
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx 2 axes
HXYx 2 axes M3
MM
MM(Whe
n at
the
orig
in p
ositi
on)
5
Y st
roke
+ 3
65
202
Y st
roke
100X stroke 262+/-3
455
240
5
33
Note 1
32.5
Y st
roke
(157
.5+/
-3)
20
Detail of section B
2-ϕ6H7 Depth878
133
63 4-M8 x 1.25 through(Board thickness 20)
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
33
(ϕ10
H7)
(14.8)
5
(150)
97.5
L (X stroke + 417)3212561
(30)
120
(Bet
wee
n kn
ocks
+/-0
.02 )
125
35.5
202
(213
)
138 21
120
268
48
8036
116
8(1
91)
275
115
A
33
MA
X. 1
100
(M4)(50)
8011
8.1 22
613
5
ϕ29 (Note 2)Grounding terminal
37
5.5
(407
)
114.
1
K
162
N-ϕ9 through (B)95 72
200M x 200
C+/-0.02 176
2-ϕ10H7: See detaild drawing of B section
90Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Detail of section A
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
348
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 350 450 550
250 18 18 18 18
350 18 18 18 18
450 18 18 18 18
550 18 17 16 15
650 18 17 16 15
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F17 F14H-BK
AC servo motor output (W) 600 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20 5
Maximum speed Note 4 (mm/sec) 1200 1200 300
Moving range (mm) 250 to 1250 250 to 650 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZHModel Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
M1 25 to 125cm 25 to 65cm 25 to 55cm 3L: 3.5m M3 5L: 5m
10L: 10m
HXYx 3 axes / ZH M1
MM
MM
X stroke252+/-3
35100
5
125
35.5
(213
)
(150)
97.5
L (X stroke + 417)32 12561
(30)
(77)
5
13821
Note 1
Y st
roke
+ (2
40.5
+/-3
)
1273
5
(Whe
n at
the
orig
in p
ositio
n)
Y st
roke
+ 3
6524
0
5
202
Y st
roke
90
(407
)
(50)
8011
8.1226
135
114.
1
C+/-0.02
K
162
N-ϕ9 through (B)9572
200M x 200
1762-ϕ10H7: See detaild drawing of B section
(M4)
ϕ29 (Note 2)
37
5.5
Grounding terminal
33
4.8
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
(ϕ10
H7)
(14.8)
8036
1 168
(191
)27
5
33
MA
X. 1
700
120268
48
115
Note 1
Scr
ew h
eigh
t
124+
/-25
Z st
roke
Z st
roke
+ 3
64(2
.5)
5
77.5
83
100
16ZK
ZM x
200 20
014
310
055
130
5
ZN-M6 x 1.0Depth10
136 51
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Detail of section B
Z-axis: clamped table / moving base type (200W) Moving arm type Cable carrier
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650
Z stroke 250 350 450 550
ZK 100 200 100 200
ZM 1 1 2 2
ZN 10 10 12 12Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZH
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
349

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
350
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx Whipover
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 to 550 8X-axis Y-axis
Axis construction Note 1 F14H F14-BK
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 150 to 850 150 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots'. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S P1 RCX222Model Cable Combination X-axis strokeNote 1 Y-axis strokeNote 1 Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
15 to 85cm 15 to 55cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 2 No entry: None5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
SXYx 2 axes P1
14.8
130
122.
5
N-M6 x 1.0 Depth10
N-ф7 through (C)
114KM x 200156
200
200
139KM x 200131
151
2-ф10H7See detaild drawing of C section
D +/-0.02
110
100
51
53 Note 2
23
34
2.3136(5.4)15
.585
136
ADetail of section A
(Between knocks +/-0.02)
110
135
8-M6 x 1.0 Depth8
2-ф6H7 Depth8
70 9032
4.5
7.2
2.8
6.5
Detail of section C
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ф10
H7)
(18.5)
Detail of section B
MM
MM
B
10325
7.5
42
X stroke
77.583
284+/-3
L (X stroke + 320)
83
242
173
Note 1
77.5
5 5
55
Y st
roke
230+
/-2
Y st
roke
+ 3
30
79
108
(50)
Note 1.The total of the X and Y strokes should be 1100mm or less.Note 2.NPN cannot be selected if using CE marking. Note 3.Available only for the master. See P.68 for details on YC-Link system.Note 4.Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
X stroke Note 3 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170
K 200 100 200 100 200 100 200 100
D 240 240 420 420 600 600 780 780
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Y stroke Note 3 150 250 350 450 550 Note 3. The total of the X and Y strokes should be 1100mm or less.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 780
Speed setting – 80% 65%
2 axes
Pole type
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
351
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx Cable carrier
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 to 650 20X-axis Y-axis
Axis construction Note 1 F17 F14H-BK
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 250 to 1250 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C P2 RCX222 RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
25 to 125cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: None5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
MXYx 2 axes P2
(M4)
(179)
125 18.5
103.
580
5.5
Grounding terminal
168
136
37
ϕ29(Note 2)
A
13810
240+
/-2Y
stro
ke
Y st
roke
+ 3
5018
0
55
(50)
179+/-3 X stroke
126.583
77.5
15
97.5
126
55Note 1
M x 200
N-ϕ9 through (B)
75K
132
40
200
2-ϕ10H7 Depth16C +/-0.02166.5
L (X stroke + 365) (200)
(345
)
(Between knocks +/-0.02)
8-M6 x 1.0 Depth8
70
110
124
140
2-ϕ6H7 Depth8
135
100
8.5
299
125
174
Detail of section A
Detail of section B
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes
Pole type
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
352
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
150 to 650 20
X-axis Y-axis
Axis construction Note 1 F17 F14H-BK
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 250 to 950 150 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx S P1 RCX222 RModel Cable Combination X-axis stroke Note 1 Y-axis strokeNote 1 Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
25 to 95cm 15 to 65cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 2 No entry: None5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. The total of the X and Y strokes should be 1100mm or less.Note 2. NPN cannot be selected if using CE marking. Note 3. Available only for the master. See P.68 for details on YC-Link system.Note 4. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
MXYx 2 axes P1
(50) 138
299
180
Y st
roke
+ 3
80
5
83301+/-3 X stroke
L (X stroke + 365)
270+
/-2
77.515
10
Y st
roke
5
Note 15 5
(M4)
ϕ29 (Note 2)
103.
5
18.5
Grounding terminal
37
80
125
5.5
168
200
40
132
K 75
N-ϕ9 through (B)
M x 200
166.5 C+/-0.02
2-ϕ10H7 Depth16
97.5
(Between knocks +/-0.02)
8-M6 x 1.0 Depth8
70
110
124
1402-ϕ6H7 Depth8
135
174
100
(179)
136
A
Detail of section B
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
Detail of section A
MM
MM
Whipover Pole type
X stroke Note 3 250 350 450 550 650 750 850 950 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315
K 100 200 100 200 100 200 100 200
C 240 420 600 600 780 780 960 960
M 2 2 3 3 4 4 5 5
N 8 8 10 10 12 12 14 14
Y stroke Note 3 150 250 350 450 550 650 Note 3. The total of the X and Y strokes should be 1100mm or less.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 4
X-axis 1200 960 840
Speed setting – 80% 70%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
353
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
MXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 150 250 350
150 to 650 10 9 8
X-axis Y-axis Z-axis
Axis construction Note 1 F17 F14H-BKF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 400 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10 20
Maximum speed Note 4 (mm/sec) 1200 600 1200
Moving range (mm) 250 to 1250 150 to 650 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note. The standard types are ZPMH with higher rigidity as compared with ZPM types which are conventional standard types. When you need the ZPM type, please consult YAMAHA.
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx 3 axes / ZPMHL P2
23.5
49.5
1002-ϕ4H7 Depth64-M5 x 0.8 through(Board thickness 10)
52
Detail of section ADetail of section B
(Bet
ween
kn
ocks
+/-0
.02)26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
75 100
(50)68719.5 12
8377.5
15126.5
40 10
132
24
(38) (76)
136
20Z stroke + 380
109
102
110+/-3 Z stroke80
5 5145 (30)
(M4)
(179)
125 18.55.5
168ϕ29(Note 2)
Grounding terminal
103.
580
37
139
Note 1
300
13810
240+
/-2
Y st
roke
+ 3
5018
0
97.5
Note 1
5 5
X stroke
55
Y st
roke
136+/-3
MA
X. 1
300
100
L (X stroke + 365) (200)
(345
)
299
174
48
12559.5
M x 200N-ϕ9 through (B)
75K40200
132
166.5 C+/-0.022-ϕ10H7 Depth16
A
Top view of ZPMHR14
5X
stro
ke +
380
110+
/-3
(76)(38)
Y-axisX-axis
689.5 71 12
20
40
MM
MM
MM
MM
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Cable carrier Pole type Z-axis: Clamped table / moving base type (200W) for Pole type
MXYx C P2Model Cable Combi-
nationX-axis stroke
Y-axis stroke ZR-axis Z-axis
stroke Cable
25 to 125cm 15 to 65cm ZPMHL 15 to 35cm 3L: 3.5m ZPMHR 5L: 5m
10L: 10m
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. This figure shows the combination for ZPMHL. For the combination for
ZPMHR, see the top view in the figure.
L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 150 250 350 450 550 650
Z stroke 150 250 350Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZPMH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
354
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 to 1050 30
X-axis Y-axis
Axis construction Note 1 F20 F20-BK
AC servo motor output (W) 600 600
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 250 to 1250 250 to 1050
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C P2 RCX222HP RModel Cable Combination X-axis
strokeY-axis stroke Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
25 to 125cm 25 to 105cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 1 No entry: None5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYx 2 axes P2
MM
MM
(M4)
118.
180
37
(213)202
35.5125
5.5
202
Grounding terminal
ϕ29 (Note 2)
Y st
roke
+ 4
47
114.
130
2+/-2
Y st
roke
55
180
A
126
Note 1
(50)
114.1
115
55
20X stroke182+/-3
126.5
21
K
162
N-ϕ9 through (B)9572
200M x 200
L (X stroke + 417)
138
(250)
C+/-0.021762-ϕ10H7: See detaild drawing of B section
41.5 125
8036
1
115
Detail of section B
Detail of section A
180
2-ϕ8H7 Depth10
185 (Between knocks +/-0.02)
160
4-M8 x 1.25 Depth30
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
(ϕ10
H7)
(14.8)
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ8.2ϕ7.6
Cable carrier Pole type
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 708 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke 250 350 450 550 650 750 850 950 1050
Maximum speed for each stroke
(mm/sec) Note 3
X-axis 1200 960 840 720 600 480 Note 3. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Y-axis 600 480 420 360
Speed setting – 80% 70% 60% 50% 40%
2 axes
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
355
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222HP-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) XY 2 axes
250 to 850 30
X-axis Y-axis
Axis construction Note 1 F20 F20-BK
AC servo motor output (W) 600 600
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 250 to 850 250 to 850
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx S P1 RCX222HP RModel Cable Combination X-axis stroke Note 1 Y-axis stroke Note 1 Cable Controller Usable for CE Regeneratine unit Input/Output
selection 1Input/Output selection 2
25 to 85cm 25 to 85cm 3L: 3.5m RCX222HP No entry: Standard R: RG2 N: NPN Note 2 No entry: None5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. The total of the X and Y strokes should be 1100mm or less.Note 2. NPN cannot be selected if using CE marking. Note 3. Available only for the master. See P.68 for details on YC-Link system.Note 4. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
HXYx 2 axes P1
MM
MM
(M4)
Y st
roke
+ 4
77
114.
133
2+/-2
Y st
roke
55
180
(50)
114.1
11520
X stroke
Grounding terminal
ϕ29 (Note 2)
362+/-3
(30)
118.
180
37
202
125
5.5
(213)
35.5
Note 1
55
L (X stroke + 417)21 138
K
162
N-ϕ9 through (B)9572
200
M x 200
C+/-0.021762-ϕ10H7: See detaild drawing of B section
A
202
115
Detail of section A
180
2-ϕ8H7 Depth10
185 (Between knocks +/-0.02)
160
4-M8 x 1.25 Depth30
Detail of section B
33
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
(ϕ10
H7)
(14.8)
Whipover Pole type
X stroke Note 3 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.Note 2. User cable extraction port.
L 667 767 867 967 1067 1167 1267
K 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960
M 2 2 3 3 4 4 5
N 8 8 10 10 12 12 14
Y stroke Note 3 250 350 450 550 650 750 850Note 3. The total of the X and Y strokes should be 1100mm or less.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on
the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 4
X-axis 1200 960
Y-axis 600 480
Speed setting – 80%
2 axes
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
356
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 650
250 to 950 15
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F20-BK F14H
AC servo motor output (W) 600 600 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10 20
Maximum speed Note 4 (mm/sec) 1200 600 1200
Moving range (mm) 250 to 1250 250 to 950 250 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C P2Model Cable Combi-
nation X-axis stroke Note 1 Y-axis stroke Note 1 ZR-axis Z-axis stroke Cable
25 to 125cm 25 to 95cm ZPHL 25 to 65cm 3L: 3.5m ZPHR 5L: 5m
10L: 10m
HXYx 3 axes / ZPHL P2
m
MM
MM
MM
Detail of section BDetail of section A
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth6
60 110
70
130
100
32
44
50
12-M6 x 1.0 through(Board thickness 10)
27
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
(ϕ10
H7)
(14.8)
(M4)
118.
180
37
(213)202
35.51255.5
202
139
90Z stroke140+/-3
30Z stroke +320
5
(25)
5
Note 1
80
136
MA
X. 1
800
350
ϕ29(Note 2) Grounding terminal
(30)
61 77.5
10
13213
8320
40115
20
114.1126.5
Y st
roke
+ 4
47
21
114.
130
2+/-2
Y st
roke
55
180
Note 1
55
X stroke
138
119+/-3
A
KN-ϕ9 through (B)
9572200
M x 200
L (X stroke + 417) (250)
162
C+/-0.021762-ϕ10H7: See detaild drawing of B section
Y-axisX-axis
Top view of ZPHR
61 77.5
10 83 2040
140+
/-330
Z st
roke
+ 3
20
361
115
48
59.5125
Cross-section of cable carrier
25 35
7793
ϕ9.7 ϕ10.1ϕ9.9
Cable carrier Pole type
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534 Note 1. The total of the Y and Z strokes should be 1200mm or less.
X stroke Note 4 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.Note 3. This figure shows the combination for ZPHL. For the combination for ZPHR,
see the top view in the figure.
L 667 767 867 967 1067 1167 1267 1367 1467 1567 1667
K 100 200 100 200 100 200 100 200 100 200 100
C 420 420 600 600 780 780 960 960 1140 1320 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Y stroke Note 4 250 350 450 550 650 750 850 950
Z stroke 250 350 450 550 650 Note 4. The total of the Y and Z strokes should be 1200mm or less.Note 5. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball
screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 5
X-axis 1200 960 840 720 600 480
Y-axis 600 480 420
Speed setting – 80% 70% 60% 50% 40%
3 axes / ZPH
Z-axis: Clamped table / moving base type (200W) for Pole type
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
357
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX340 u 544 RCX240 u 534
HXYx
Controller Operation method
RCX340RCX240-R
Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
Y stroke (mm) 250 to 650
250 to 850 15
X-axis Y-axis Z-axis
Axis construction Note 1 F20 F20-BK F14H
AC servo motor output (W) 600 600 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01 +/-0.01
Drive system Ball screw Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10 20
Maximum speed Note 4 (mm/sec) 1200 600 1200
Moving range (mm) 250 to 850 250 to 850 250 to 650
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions
(critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx S P1Model Cable Combi-
nation X-axis stroke Note 1 Y-axis stroke Note 1 ZR-axis Z-axis stroke Cable
25 to 85cm 25 to 85cm ZPHL 25 to 65cm 3L: 3.5m ZPHR 5L: 5m
10L: 10m
HXYx 3 axes / ZPHL P1
MM
MM
MM
MM
Detail of section A
(Bet
wee
n kn
ocks
+/-0
.02 )
2-ϕ6H7 Depth6
60 110
70
130
100
32
44
50
12-M6 x 1.0 through(Board thickness 10)
27
Detail of section B
33Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 45mm or more.
4.8
(ϕ10
H7)
(14.8)
(M4)
118.
180
37
Grounding terminalϕ29 (Note 2)
20235.5125
5.5
(213)
20114.1
108320
40115
10
(50)
(30)
6177.5
Y st
roke
+ 4
7711
4.1
332+
/-2Y
stro
ke 55
180
Note 1
55
X stroke425+/-3132
6
KN-ϕ9 through (B)
9572200
M x 200
L (X stroke + 417)21 138
162
C+/-0.02176
202
115
90Z stroke140+/-3
30(25)
Note 1
136
5 5225
80
139
4020 83 10Y-axis
X-axis
Top view of ZPHR
77.5 61
140+
/-3
30Z
stro
ke +
320
A
Z stroke + 320
2-ϕ10H7: See detaild drawing of B section
Whipover Pole type Z-axis: Clamped table / moving base type (200W) for Pole type
RCX340-3Controller /
Number of controllable axesSafety
standardOption A
(OP.A)Option B
(OP.B) Option C
(OP.C)Option D
(OP.D)Option E
(OP.E) Absolute battery
Specify various controller setting items. RCX340 P.544
RCX240 RController CE Marking Regeneratizve unit Expansion I/O Network option iVY System Gripper Battery
Specify various controller setting items. RCX240/RCX240S P.534 Specify various controller setting items. RCX240/RCX240S P.534 Note 1. The total of the X and Y strokes should be 1100mm or less and that of the Y and Z strokes should be 1200mm or less.
X stroke Note 4 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.Note 2. User cable extraction port.Note 3. This figure shows the combination for ZPHL. For the combination for ZPHR, see the top view in the figure.L 667 767 867 967 1067 1167 1267
K 100 200 100 200 100 200 100
D 420 420 600 600 780 780 960
M 2 2 3 3 4 4 5
N 8 8 10 10 12 12 14
Y stroke Note 4 250 350 450 550 650 750 850
Z stroke 250 350 450 550 650 Note 4. The total of the X and Y strokes should be 1100mm or less and that of the Y and Z strokes should be 1200mm or less.
Note 5. When the X-axis/Y-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke
(mm/sec) Note 5
X-axis 1200 960
Y-axis 600 480
Speed setting – 80%
3 axes / ZPH
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
358
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 1050 10
X-axis Z-axis
Axis construction Note 1 F14 F10-BK
AC servo motor output (W) 100 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 150 to 1050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZF RCX222Model Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
F1 15 to 105cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 3
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2. YC: YC-Link Note 2
SXYx 2 axes / ZF F1
122.
5 54
(35)
33115
77.5
Detail of section A
2-ϕ5H7 Depth15
4-M5 x 0.8 Depth12
70
100
110
86
Detail of section B
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ϕ10
H7)
(18.5)
2-ϕ10H7See detaild drawing of B section125
105 100
200
200
M x 20080 K
100
N-ϕ7 through (B)
N-M6 x 1.0 Depth10
K M x 200
110
126C +/-0.02
4.5
68
65
71
190
123.5
79
83
5
X stroke170+/-3
L (X stroke + 255)25
Z st
roke
+ 2
90
132.
5
5
102
109
512
7
Z st
roke
195+
/-2
5
130(50) Note 1
(236
)
136
79
35.5
A
Note 2
53
2351
(Between knocks +/-0.02)
MM
MM
Cross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Cable carrier XZ type
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 405 505 605 705 805 905 1005 1105 1205 1305
K 200 100 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 780 960 960
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / ZF
Z-axis: clamped base / moving table type (100W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
359
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 850 10
X-axis Z-axis
Axis construction Note 1 F14 F10-BK
AC servo motor output (W) 100 100
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 150 to 850 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx S ZF RCX222Model Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
F1 15 to 85cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 3
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2. YC: YC-Link Note 2
SXYx 2 axes / ZF F1
122.
5 54
(35)
5123
53 35.5
Note 2
Detail of section A Detail of section B
110
2ϕ5H7 Depth15
4-M5 x 0.8 Depth12 Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
(18.5)
70
100
86
9(ϕ
10H
7)
(6.5) 65 (40)
187
55
Z st
roke
+ 3
50
Z st
roke
255+
/-2
5
X stroke170+/-3
L (X stroke + 255)25
5
102
Note 1
109
130(50)
15
132.
5 136
79
60.5
ϕ37
MA
X. 1
000
A
68
71 83
77.5
4.5
2-ϕ10H7See detaild drawing of B section125
105 100
200
200
M x 20080 K
100
N-ϕ7 through (B)
N-M6 x 1.0Depth10
K M x 200
110
126C+/-0.02
(Between knocks +/-0.02)
MM
MM
Whipover XZ type
X stroke 150 250 350 450 550 650 750 850 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 405 505 605 705 805 905 1005 1105
K 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 780
M 0 1 1 2 2 3 3 4
N 4 6 6 8 8 10 10 12
Z stroke 150 250 350
Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780
Speed setting – 80% 65%
2 axes / ZF
Z-axis: clamped base / moving table type (100W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
360
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 1050 8
X-axis Z-axis
Axis construction Note 1 F14F10-BK equivalent
guide-reinforced model
AC servo motor output (W) 100 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 20
Maximum speed Note 4 (mm/sec) 1200 1200
Moving range (mm) 150 to 1050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C ZFL20 RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unit Note 1Input/Output selection 1
Input/Output selection 2
F1 15 to 105cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 2 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. DRCX0510 uses the RGU-2 regenerative unit. The RCX222 uses the RG2.Note 2. NPN cannot be selected if using CE marking.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 4
Note 3. Available only for the master. See P.68 for details on YC-Link system. YC: YC-Link Note 3
Note 4. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
SXYx 2 axes / ZFL20 F1
23
53
Note 2
54
122.
5(3
5)
35.5
51
130
X stroke170+/-3
L (X stroke + 255)25
(50)
(236
)
5
136
79
1025
139.
5
Z st
roke
+ 3
85
248+
/-2145
55
Z st
roke
Note 1
A109
33115
77.5
100
110
68
71
190
123.5
79
83
(76)
70
2-ϕ5H7 Depth15
8
6-M5 x 0.8 Depth12
110
100
7015
6
4370
+/-0
.02
Detail of section A Detail of section B
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
5.5
(ϕ10
H7)
(18.5)
9
125
105
200
200
M x 20080 K
N-ϕ7 through (B)
N-M6 x 1.0Depth10
K M x 200 100
126C+/-0.02
2-ϕ10H7See detaild drawing of B section
(Between knocks +/-0.02)
MM
MM
Cross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Cable carrier XZ type
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 405 505 605 705 805 905 1005 1105 1205 1305
K 200 100 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 780 960 960
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / ZFL20
Z-axis: clamped base / moving table type (200W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
361
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYx
Controller Operation method
RCX222Programming / I/O point trace /Remote command / Operation using RS-232C communication
Y stroke (mm) ZS12 ZS6
150 to 1050 3 5X-axis Z-axis: ZS12 Z-axis: ZS6
Axis construction Note 1 F14 –
AC servo motor output (W) 100 60
Repeatability Note 2 (mm) +/-0.01 +/-0.02
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 12 6
Maximum speed Note 4
(mm/sec)
During RCX240 use 1200 1000 500
During DRCX use 1200 900 450
Moving range (mm) 150 to 1050 150
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
SXYx C 15 RCX222Model Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Input/Output
selection 1Input/Output selection 2
F1 15 to 105cm ZS12 3L: 3.5m RCX222 No entry: Standard N: NPN Note 1 No entry: NoneF3 ZS6 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)Note 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.
PB: PROFIBUSEN: Ethernet EN: Ethernet Note 3
Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2. YC: YC-Link Note 2
SXYx 2 axes / ZS F1
Note 2
2351
35.553
122.
5 54
(35)
Detail of section BDetail of section A
Depth15
ϕ12 0-0.018
3641
ϕ5
M8 x 1.25 Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ϕ10
H7)
(18.5)
7913
6
5
176
(50)
25 L (X stroke + 255)
170+/-3 X stroke
5
130
6
100+
/-2Z
stro
ke
6
115
Note 1
40
300
72
(236
)
83110
233
122.5
53 34
29
23
7919
0
51
Note 2
67.5
101
299
67
A
2-ϕ10H7See detaild drawing of B section125
105 100
200
200
M x 20080 K
100
N-ϕ7 through (B)
N-M6 x 1.0Depth10
K M x 200
110
126C+/-0.02
77.5
MMMM
Cross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Cable carrier XZ type
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 405 505 605 705 805 905 1005 1105 1205 1305
K 200 100 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 780 960 960
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Z stroke 150Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / ZS
Z-axis shaft vertical type
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
362
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYBx
Controller Operation method
RCX222 Programming / I/O point trace /Remote command / Operation using RS-232C communication
Note. A regenerative unit is required when the maximum speed exceeds 1250mm/sec.
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 3050 10
X-axis Z-axis
Axis construction Note 1 B14H F10-BK
AC servo motor output (W) 200 100
Repeatability Note 2 (mm) +/-0.04 +/-0.01
Drive system Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 10
Maximum speed (mm/sec) 1875 600
Moving range (mm) 150 to 3050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZF RCX222Model Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unit Note 1Input/Output selection 1
Input/Output selection 2
F1 15 to 305cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard No entry: None N: NPN Note 2 No entry: NoneF3 5L: 5m E: CE marking R: RG2 P: PNP N1: OP.DIO24/16
(NPN) Note 210L: 10m CC: CC-Link
Note 1. Regenerative unit RG2 is required when the maximum speed on the RCX222 exceeds 1250mm/sec. Note 2. NPN cannot be selected if using CE marking. Note 3. Available only for the master. See P.68 for details on YC-Link system.Note 4. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
DN: DeviceNetTM P1: OP.DIO24/17 (PNP)PB: PROFIBUS
EN: Ethernet EN: Ethernet Note 4
YC: YC-Link Note 3
SXYBx 2 axes / ZF F1
115 38
34
122.5
87
23
79
53Note 2
58.5
51
178
16711
92
195
109
Z st
roke
+ 2
90
102
Z st
roke
136
(168
)
144.
5
55
X stroke
152
12.5 12.5
A
195+
/-2
235+/-3
L (X stroke + 388)
130
1.5 78
Note 1
Detail of section A
100
4-M5 x 0.8 Depth12
110
2-ϕ5H7 Depth15
68
94
4.565133
71
90.5
127
190
7970 86
(Between knocks +/-0.02)
MM
Cross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
S
S
Cross-sectional drawing S-S
Grounding terminal (M4)
73
85 108
100
KM×200
200
100
N-M6×1.0 Depth 1040.5
85 C+/-0.02 D+/-0.02 F-ϕ10H7: See the cross-sectional drawing of S-S.E+/-0.02
5.5(ϕ
10H
7)
18.5
Cable carrier XZ type
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper. Note 2. The shaded position indicates an user cable extraction port.Note 3. LU specification should be used for installation of the X axis motor.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050
L 538 638 738 838 938 1038 1138 1238 1338 1438 1538 1638 1738 1838 1938 2038 2138 2238 2338 2438 2538 2638 2738 2838 2938 3038 3138 3238 3338 3438
K - 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100
C 240 420 420 600 600 780 780 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140
D - - - - - - - - - - - 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140
E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960
F 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4
M 1 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15
N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36
Z stroke 150 250 350
2 axes / ZF
Z-axis: clamped base / moving table type (100W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
363
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
SXYBx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 3050 8
X-axis Z-axis
Axis construction Note 1 B14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 200
Repeatability Note 2 (mm) +/-0.04 +/-0.01
Drive system Timing belt Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) Equivalent to lead 25 20
Maximum speed (mm/sec) 1875 1200
Moving range (mm) 150 to 3050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.
SXYBx C ZFL20 RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
F1 15 to 305cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
SXYBx 2 axes / ZFL20 F1
115 38
58.5
34
122.5
23
53Note 2
178
16711
92
195
87
5179
55
X stroke12.5 12.5
235+/-3L (X stroke + 388)
145
248+
/-2Z
stro
ke
Z st
roke
+ 3
85
102
151.
5
152130
1.5
(168
)13
6
Note 1
78
A
109
68
94
133
71
90.5
190
79
(76)
70
43
100110
6-M5 x 0.8 Depth12
8
2-ϕ5H7Depth15
7015
6
70+/
-0.0
2
Detail of section A
(Between knocks +/-0.02)
MM
Cross-section of cable carrier
35255773
ϕ9.7 ϕ8.2ϕ7.6
S
S
Cross-sectional drawing S-S
Grounding terminal (M4)
73
85 108
100
KM×200
200
100
N-M6×1.0 Depth 1040.5
85 C+/-0.02 D+/-0.02 F-ϕ10H7: See the cross-sectional drawing of S-S.E+/-0.02
5.5
(ϕ10
H7)
18.5
Cable carrier XZ type
Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper. Note 2. The shaded position indicates an user cable extraction port.Note 3. LU specification should be used for installation of the X axis motor.
X stroke 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450 1550 1650 1750 1850 1950 2050 2150 2250 2350 2450 2550 2650 2750 2850 2950 3050
L 538 638 738 838 938 1038 1138 1238 1338 1438 1538 1638 1738 1838 1938 2038 2138 2238 2338 2438 2538 2638 2738 2838 2938 3038 3138 3238 3338 3438
K - 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100 200 100
C 240 420 420 600 600 780 780 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140
D - - - - - - - - - - - 240 240 420 600 600 780 780 960 960 1140 1140 1140 1140 1140 1140 1140 1140 1140 1140
E - - - - - - - - - - - - - - - - - - - - - - 240 240 420 420 600 600 780 960
F 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 4 4 4 4 4 4 4 4
M 1 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 11 11 12 12 13 13 14 14 15
N 6 8 8 10 10 12 12 14 14 16 16 18 18 20 20 22 22 24 24 26 26 28 28 30 30 32 32 34 34 36
Z stroke 150 250 350
2 axes / ZFL20
Z-axis: clamped base / moving table type (200W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
364
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 to 350
150 to 1050 15
X-axis Z-axis
Axis construction Note 1 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 150 to 1050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots'. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C ZFL10 RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
F1 15 to 105cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
MXYx 2 axes / ZFL10 F1
54
122.
5
33115
77.5
(35)
5123
53
Note 2
35.5
130(50)
(236
)
15
136
79
139.
5
X stroke210+/-3
L (X stroke + 320)
5102
5
Z st
roke
+ 3
85
248+
/-2145
55
Z st
roke
A109
Note 1
68
71
190
123.5
79
83
(76)
138
157
200
200
M x 200132 K
100
N-ϕ7 through (B)
N-M6 x 1.0Depth10
K M x 200
110
113
151C+/-0.02
2-ϕ10H7See detaild drawing of B section
Detail of section A
70
2-ϕ5H7Depth15
8
6-M5 x 0.8 Depth12
110
100
43
7015
6
70+/
-0.0
2
Detail of section B
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ϕ10
H7)
(18.5)
(Between knocks +/-0.02)
MM
MM
Cross-section of cable carrier3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Cable carrier XZ type
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / ZFL10
Z-axis: clamped base / moving table type (200W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
365
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
MXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 150 250 350
150 to 1050 14 13 12
X-axis Z-axis
Axis construction Note 1 F14HF10-BK equivalent
guide-reinforced model
AC servo motor output (W) 200 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 150 to 1050 150 to 350
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots'. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 750mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
MXYx C ZFH RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
F1 15 to 105cm 15 to 35cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1.NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3.Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
MXYx 2 axes / ZFH F1
54
122.
5(3
5)
77.5
115 33
5123
53
Note 2
35.5130(50)
15
210+/-3
L (X stroke +320)
Note 1 5 55
X stroke102
145
76
(236
)5
Z st
roke
+ 3
85Z
stro
ke
130
139.
5+/-2
(111) 109
86
A
136
79
Detail of section A Detail of section B
Use M6 x 1.0 hex socket head bolt with length head bolt with length (under head) of 20mm or more.
9
5.5
(ϕ10
H7)
(18.5)4-M5 x 0.8 Depth9
2-ϕ5H7 Depth811
262
100
70 (Between knocks +/-0.02)
110
71
26
7919
0
(152)
68
20
123.5
83
138
157
200
200
M x 200132 K
100
N-ϕ7 through (B)
N-M6 x 1.0Depth10
K M x 200 113
151C+/-0.02
2-ϕ10H7See detaild drawing of B section
MM
MM
Cross-section of cable carrier Cross-section of cable carrier
3525 35255773
5773
ϕ9.7 ϕ8.2ϕ7.6
ϕ8.2ϕ7.6
XZ Z
Z
XZ
Cable carrier XZ type
X stroke 150 250 350 450 550 650 750 850 950 1050 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. The shaded position indicates an user cable extraction port.L 470 570 670 770 870 970 1070 1170 1270 1370
K 200 100 200 100 200 100 200 100 200 100
C 240 240 420 420 600 600 780 960 960 1140
M 0 1 1 2 2 3 3 4 4 5
N 4 6 6 8 8 10 10 12 12 14
Z stroke 150 250 350Note 3. When the X-axis stroke is longer than 750mm, resonance of the ball screw may
occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 780 600 540
Speed setting – 80% 65% 50% 45%
2 axes / ZFH
Z-axis: clamped table / moving base type (200W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100
366
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 250 to 550
250 to 1250 20
X-axis Z-axis
Axis construction Note 1 F17 F14H-BK
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 10
Maximum speed Note 4 (mm/sec) 1200 600
Moving range (mm) 250 to 1250 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZL RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
F1 25 to 125cm 25 to 55cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYx 2 axes / ZL F1
MMMM
MM
M x 200
N-ϕ9 through (B)
75 K
132
40
200
166.5C+/-0.02
2-ϕ10H7 Depth16
(Between knocks +/-0.02)
1358-M6 x 1.0 Depth8
140
110
124
70
2-ϕ6H7 Depth8
26.5
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
(M4)
10
5.5
125
8021
4
77.5
83
20100
ϕ29 (Note 2)
37
Grounding terminal
(50)
55
148
Z st
roke
X stroke
Z st
roke
+ 3
50
168
80
97.5
136
240+
/-2
(176
)
125
5
159
5
4
157
240+/-3
L (X stroke + 365)
182 9
Note 1
ACross-section of cable carrier
3525
5773
ϕ9.7 ϕ8.2ϕ7.6
Detail of section A Detail of section B
Cable carrier XZ type
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Z stroke 250 350 450 550Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes / ZL
Z-axis: clamped base / moving table type (200W)
Ordering method
Specification Maximum payload (kg)
Controller

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts YP-X
CLEA
NCO
NTRO
LLERINFO
RMATIO
N
Lin
ea
r convey o
r m
od
ule
s
LCM
100
367
Arm
type
Gantry type
Moving arm
type
Po
le type
XZ
type
Controller RCX222 u 526
HXYx
Controller Operation method
RCX222-RProgramming / I/O point trace /Remote command / Operation using RS-232C communication
Z stroke (mm)
X stroke (mm) 250 to 550
250 to 1250 30
X-axis Z-axis
Axis construction Note 1 F17 F14H-BK
AC servo motor output (W) 400 200
Repeatability Note 2 (mm) +/-0.01 +/-0.01
Drive system Ball screw Ball screw
Ball screw lead Note 3 (Deceleration ratio) (mm) 20 5
Maximum speed Note 4 (mm/sec) 1200 300
Moving range (mm) 250 to 1250 250 to 550
Robot cable length (m) Standard: 3.5 Option: 5,10
Note 1. Use caution that the flame machining (installation holes, tap holes) differs from single-axis robots’. Note 2. Positioning repeatability in one direction.Note 3. Leads not listed in the catalog are also available. Contact us for details.Note 4. When the X-axis stroke is longer than 850mm, resonance of the ball screw may occur depending on the operation conditions (critical
speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table below.
HXYx C ZH RCX222 RModel Cable Combination X-axis
stroke ZR-axis Z-axis stroke Cable Controller Usable for CE Regeneratine
unitInput/Output selection 1
Input/Output selection 2
F1 25 to 125cm 25 to 55cm 3L: 3.5m RCX222 No entry: Standard R: RG2 N: NPN Note 1 No entry: NoneF3 5L: 5m E: CE marking P: PNP N1: OP.DIO24/16
(NPN) Note 110L: 10m CC: CC-LinkDN: DeviceNetTM P1: OP.DIO24/17
(PNP)PB: PROFIBUSNote 1. NPN cannot be selected if using CE marking. Note 2. Available only for the master. See P.68 for details on YC-Link system.Note 3. Only when CC or DN or PB was selected for I/O select 1 above. EN can be selected in I/O select 2.
EN: Ethernet EN: Ethernet Note 3
YC: YC-Link Note 2
HXYx 2 axes / ZH F1
MM
MM
MM
(Scr
ew h
eigh
t)
268
106
148
136
97
120
5 5
X stroke159240+/-3
L (X stroke + 365) (120)
Note 1
168
80
124+
/-2(176
)
Z st
roke
+ 3
64Z
stro
ke5
5
48
(150
)5515
0
77.5
(2.5
)
7(148)
60
M x 200N-ϕ9 through (B)
75 K
132
40200
166.5C+/-0.022-ϕ10H7 Depth16
Use M8 x 1.25 hex socket head bolt with length head bolt with length (under head) of 40mm or more.
26.5
(M4)
ϕ29 (Note 2)
125
8021
4
Grounding terminal
37
5.5
A
100 8320
10
VIEW A
ZN-M6 x 1.0 Depth10 100
1655
ZKZM
x 2
00 200
143
(50) 97.5
100
412
5
Cross-section of cable carrier Cross-section of cable carrier
3525 3525
5773
5773
ϕ9.7 ϕ8.2ϕ7.6
ϕ8.2ϕ7.6
XZ
XZ
Detail of section B
Z
Z
Cable carrier XZ type
X stroke 250 350 450 550 650 750 850 950 1050 1150 1250 Note 1. The moving range when returning to origin and the stop position when stopping by the mechanical stopper.
Note 2. User cable extraction port.L 615 715 815 915 1015 1115 1215 1315 1415 1515 1615
K 100 200 100 200 100 200 100 200 100 200 100
C 240 420 600 600 780 780 960 960 1140 1140 1320
M 2 2 3 3 4 4 5 5 6 6 7
N 8 8 10 10 12 12 14 14 16 16 18
Z stroke 250 350 450 550
ZK 100 200 100 200
ZM 1 1 2 2
ZN 10 10 12 12Note 3. When the X-axis stroke is longer than 850mm, resonance of the ball screw
may occur depending on the operation conditions (critical speed). In this case, reduce the speed setting on the program by referring to the maximum speeds shown in the table at the left.
Maximum speed for each stroke (mm/sec) Note 3
X-axis 1200 960 840 720 600 480
Speed setting – 80% 70% 60% 50% 40%
2 axes / ZH
Z-axis: clamped table / moving base type (200W)
Ordering method
Specification
Controller
Maximum payload (kg)

Articulate
d rob
ots
YA
Co
mp
act
sing
le-a
xis rob
ots
TRAN
SERVOS
ing
le-a
xis rob
ots
FLIP-X
Lin
ea
r mo
tor
sing
le-a
xis rob
ots
PHA
SER
Ca
rtesia
nro
bo
ts
XY-X
SC
AR
Aro
bo
ts
YK
-X
Pick &
pla
cero
bo
ts Y
P-XC
LEAN
CON
TROLLER
INFORM
ATION
Lin
ea
r convey o
r m
od
ule
s
LCM
100A
rm typ
eG
antry typeM
oving arm
typeP
ole typ
eX
Z type
368
Top Related