







Languages
Pages
Legal


-- --
Image Segmentation
• Goals and Difficulties
- The goal of segmentation is to partition an image into regions (e.g.,separate objects from background)
- The results of segmentation are very important in determining theev entual success or failure of image analysis
- Segmentation is very a very difficult problem in general !!
• Increasing Accuracy and Robustness
- Introduce enough knowledge about the application domain
- Control the environment (e.g., in industrial applications)
- Select type of sensors to enhance the objects of interest
(e.g, use infrared imaging for target recognition applications)
-- --
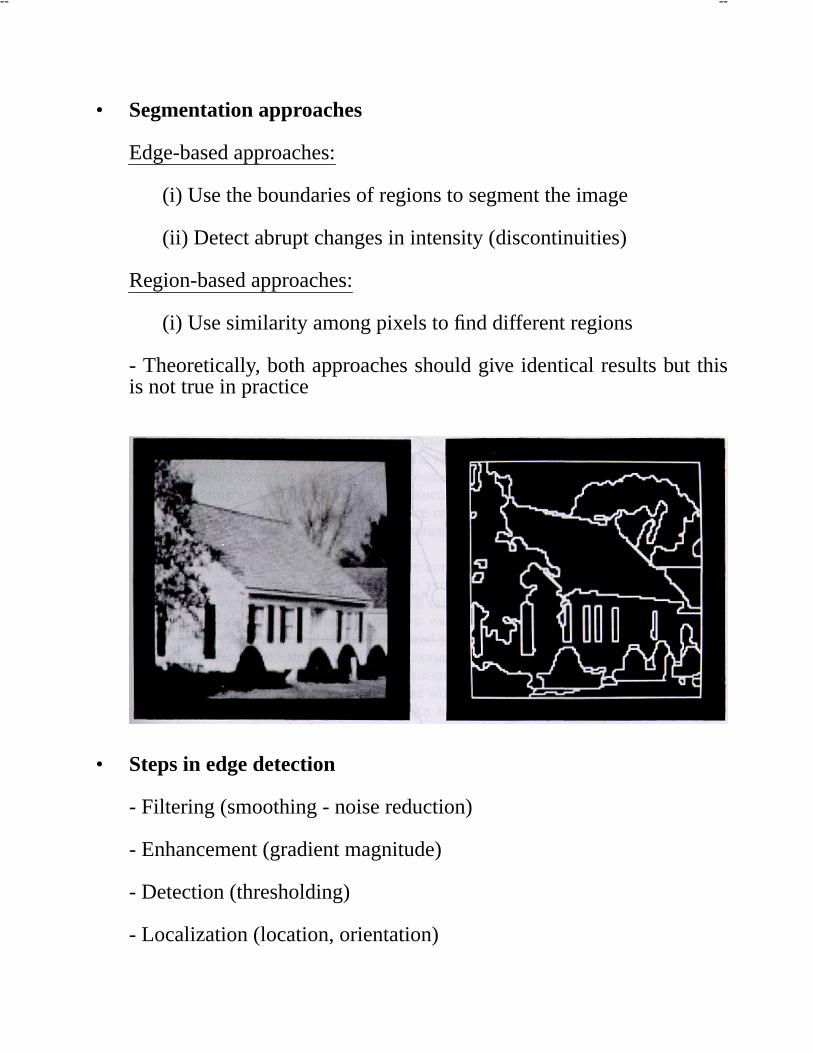
• Segmentation approaches
Edge-based approaches:
(i) Use the boundaries of regions to segment the image
(ii) Detect abrupt changes in intensity (discontinuities)
Region-based approaches:
(i) Use similarity among pixels to find different regions
- Theoretically, both approaches should give identical results but thisis not true in practice
• Steps in edge detection
- Filtering (smoothing - noise reduction)
- Enhancement (gradient magnitude)
- Detection (thresholding)
- Localization (location, orientation)

-- --
Detecting Discontinuities
• General Idea
- Apply a mask over the image
- Apply thresholding: If |R| > T, then discontinuity !!
input image
w1 w2 w3
w4 w5 w6
w7 w8 w9
z1 z2 z3
z4 z5 z6
z7 z8 z9
z5’
z5’ = R = w1z1 + w2z2 + ... + z9w9
convolved image
• Point Detection
8
-1 -1
-1 -1
-1 -1 -1
-1
1
10
1 1 1 1
1 1 1 1
1 1 1 1
1 1 1 1 1
1 1 1 1 1
1
- - - - -
-
-
-
-----
-
-
- 72 -9 0
-9 -9 0
0 0 0
* =
original image convolved image
mask
- Depending on the value of T , we get 4 points (0 < T ≤ 9), 1 point(9 < T ≤ 72) or 0 points (T > 72)

-- --
• Line detection
- The masks shown below can be used to detect lines at various orien-tations
-1 -1
-1 -1 -1
-1
*
mask
2 2 2
=
=
0 0 0 0
0000
1 1 1 1
1
1
1
0
0
0
0
0
0
0
0
0
- - - -
-
----
-
- - - -
-
----
-
6 6
0 0
horizontal line
vertical line
convolved image
convolved image

-- --
- In practice, we run every mask over the image and we combine theresponses:
R(x, y) = max(|R1(x, y)|, |R2(x, y)|, |R3(x, y)|, |R4(x, y)|)
If R(x, y) > T , then discontinuity
-1 -1
-1 -1 -1
-1 -1-1 -1
-1 -1
-1
2
-1 -1
-1 -1
2
-1 -1 -1222 2 -1
-1-12
2
-1
2
2
2
2
-1
Original Image
R1 R2 R3 R4
Convolved Image with R1
Convolved Image with R2
Convolved Image Convolved Image with R4 with R3
. . .
.
.
(x,y)
(x,y) (x,y) (x,y) (x,y)
MAX
-- --
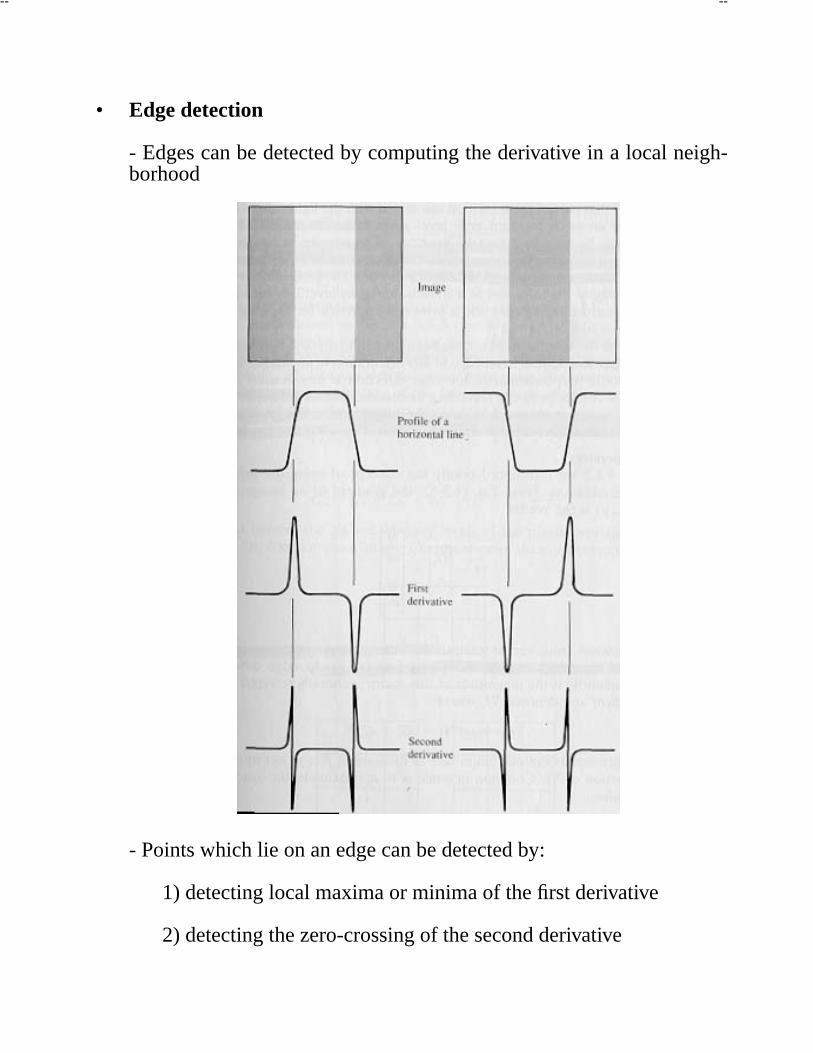
• Edge detection
- Edges can be detected by computing the derivative in a local neigh-borhood
- Points which lie on an edge can be detected by:
1) detecting local maxima or minima of the first derivative
2) detecting the zero-crossing of the second derivative

-- --
• Computing edges using the first derivative
- Compute the gradient !!
∇ f =
∂ f
∂x∂ f
∂y
magnitude(∇ f ) = √ (∂ f
∂x)2 + (
∂ f
∂y)2 = √ Gx
2 + Gy2
(can be approximated by: |Gx | + |Gy |)
direction(∇ f ) = tan−1(Gy/Gx)
- Steps
1) Gx = f (x, y) * Mx(x, y)
2) Gy = f (x, y) * My(x, y)
3) M(x, y) = |Gx | + |Gy |
4) a(x, y) = tan−1(Gy/Gx)
5) If M(x, y) > T , then discontinuity

-- --
• Properties of the magnitude of gradient
- The direction of the gradient is perpendicular to the direction ofthe edge
- The magnitude of gradient is isotropical operator, that is, itdetects edges in any direction !!

-- --
• Computing edges using the second derivative
- The second derivative can be obtained using the Laplacian
∇2 f =∂2 f
∂2 x+
∂2 f
∂2 y
- Approximating ∇2 f
∂2 f
∂2 x= f (x − 1, y) − 2 f (x, y) + f (x + 1, y)
∂2 f
∂2 y= f (x, y − 1) − 2 f (x, y) + f (x, y + 1)
∇2 f = − 4 f (x, y) + f (x + 1, y) + f (x − 1, y) + f (x, y + 1) + f (x, y − 1)
Z1 Z2 Z3
Z4 Z5 Z6
Z7 Z8 Z9 ∇2 f = − 4z5 + (z2 + z4 + z6 + z8)
- The Laplacian can be implemented using the mask shown below
0 0
1 1
0 1 0
-4
1

-- --
• Properties of the second derivative
- It is an isotropic operator
- It is cheaper to implement (one mask only)
- It does not provide information about edge direction
- It is more sensitive to noise (differentiates twice)
- To reduce the noise effect, the image should be first smoothed with alow-pass filter
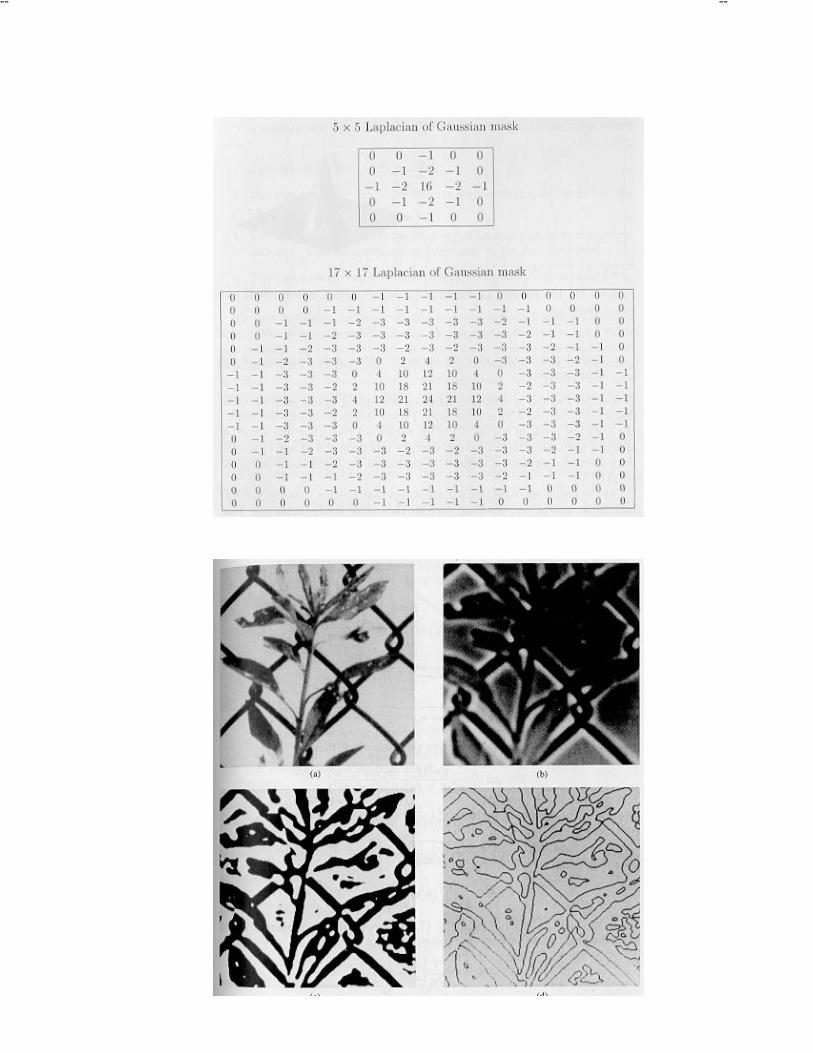
• The Laplacian-of-Gaussian (LOG) edge detector
- The low-pass filter is chosen to be a Gaussian
h(x, y) = e−
x2+y2
2σ 2
(σ determines the degree of smoothing, mask size increases with σ )
- It can be shown that
∇2[ f (x, y) * h(x, y)] = ∇2h(x, y) * f (x, y)
∇2h(x, y) = (r2 − σ 2
σ 4)e−r2/2σ 2
, (r2 = x2 + y2)
-- --
-- --
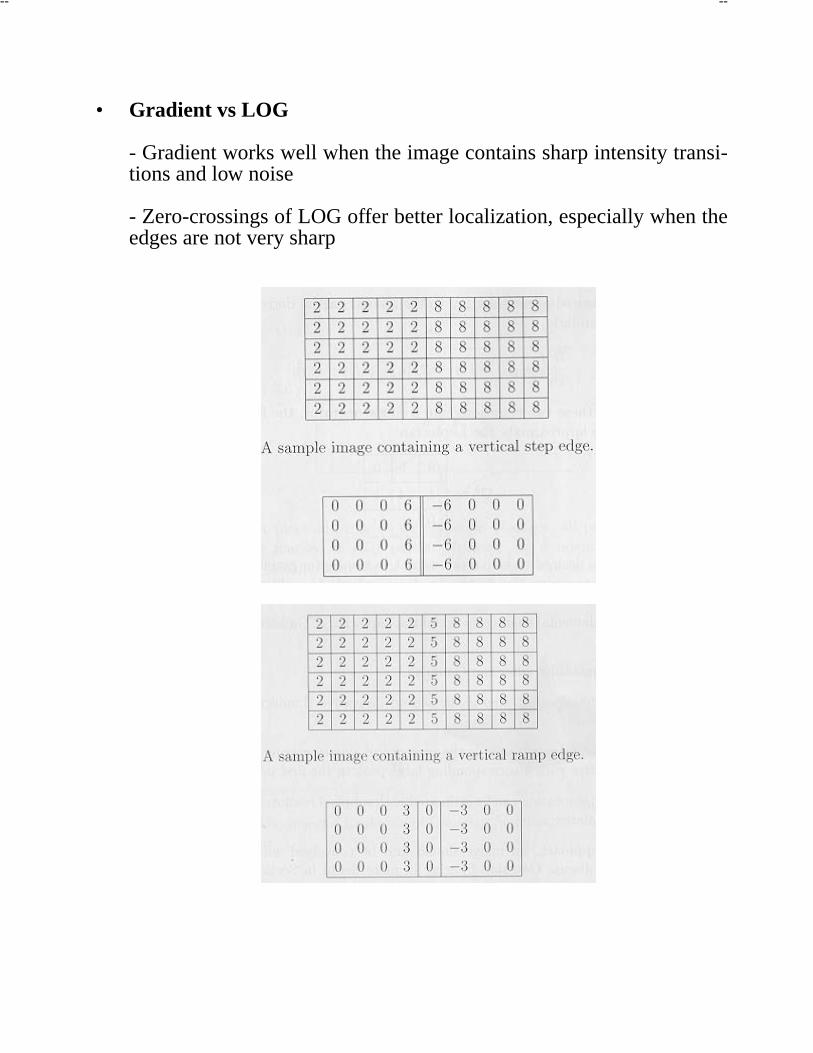
• Gradient vs LOG
- Gradient works well when the image contains sharp intensity transi-tions and low noise
- Zero-crossings of LOG offer better localization, especially when theedges are not very sharp

-- --
Edge Linking and Boundary Detection
- Edge detection does not yield connected boundaries
- Edge linking and boundary following must be applied after edgedetection
• Local processing methods
- At each pixel, a neighborhood (e.g., 3x3) is examined
- Pixels which are similar in this neighborhood are linked
- How do we define similarity ?
|∇ f (x, y) − ∇ f (x′, y′)| ≤ T (magnitude)
|a(x, y) − a(x′, y′)| ≤ A (direction)

-- --
• Global processing methods
- If the gaps between pixels are very large, local processing methodsare not effective
- Model-based approaches can be used in this case !!
- Hough Transform can be used to determine whether points lie on acurved of a specified shape
Using Hough Transform to detect lines
- Consider the slope-intercept equation of line
y = ax + b,
(a, b are constants, x is a variable, y is a function of x)
- Rewrite the equation as follows:
b = −xa + y
(now, x, y are constants, a is a variable, b is a function of a)

-- --
- The following properties are true:
Each point (xi, yi) defines a line in the a − b space (parameterspace)
Points lying on the same line in the x − y space, define lines in theparameter space which all intersect at the same point
The coordinates of the point of intersection define the parametersof the line in the x − y space
• Algorithm
1. Quantize the parameter spaceP[amin, . . . , amax][bmin, . . . , bmax] (accumulator array)
2. For each edge point (x, y)
For(a = amin; a ≤ amax; a++) {
b = − xa + y; /* round off if needed *
(P[a][b])++; /* voting */
}
3. Find local maxima in P[a][b]
(If P[a j][bk]=M, then M points lie on the line y = a j x + bk)
Top Related