







Languages
Pages
Legal


Christof Douma
Functional Reactive Programming

What are reactive systems?Transformational vs. Reactive
● Transformational systems compute output from an input and then terminate. Examples: UUAG, GHC, Latex.
● Reactive systems respond to stimuli in order to bring about desirable effects in their environment. Examples: Proxima, Mozilla, Quake, Space Invaders.

Why Functional Reactive Programming?
● Functional programming has usually been applied to build transformational systems.
● Usually imperative paradigms are adopted when building reactive systems.
● FRP is a new paradigm to program reactive systems in a functional language.
● Useful for Embedded Domain Specific Languages
What is FRP Good for?
● Applications of FRP (EDSL)– FVision [Reid, Peterson, Hudak and Hager] Visiual tracking– Fran [Elliott and Hudak] Interactive animation– FranTk [Sage], Fruit [Courtney] GUI– Frob [Peterson, Hager, Hudak and Elliott] Robotics
moveXY (sin time) 0 charlotte
charlotte = importBitmap “charlotte.bmp”

FRP Pardigm
● FRP has two key abstractions● Continuous time-varying values● Discrete streams of events
● Uses combinators that hide detail about timing and synchronization
Signal a = Time -> a

Signal Functions
● Signals can be manipulated directly● Problem: Time- and space-leaks
– Time leaks occur in real-time systems when a computation does not “keep up” with the current time, this requiring “catching up” at a later time.
● Solution: Use Signal Functions– Signals are not fist class values anymore
SF a b = Signal a -> Signal b

Signal Function Example
● An example, the sin function: Floating a => SF a a
time
time

Composing FRP programs
● Complex programs can be build by composing simpler programs
● Current implementation uses the Arrow class– change of name: AFRP
arr :: (a -> b) -> SF a b
(>>>) :: SF a b -> SF b c -> SF a c
first :: SF a b -> SF (a,c) -> SF (b,c)

AFRP Example
● Travel returns a SF that generates a constant signal v while the distance d hasn't yet been travelled.
travel :: Distance -> Velocity -> SF Velocity Velocity
travel d v = integral >>> arr (\d2 -> if d2 < d then v else 0)(note the lack of explicite time)

Composing AFRP programs
● more Arrow combinators
second :: SF a b -> SF (c,a) (c,b)
(<<<) :: SF b c -> SF a b -> SF a c
(&&&) :: SF a b -> SF a c -> SF a (b,c)
(***) :: SF a b -> SF c d -> SF (a,c) (b,d)
loop :: SF (a,c) (b,c) -> SF a b

Arrows vs Monads
● IO Programs are a composition of actions with the details of the state are hidden from the user. It is ran at the top level by an interpreter
● AFRP programs is a composition of signal function with the details of the signals hidden from the user. It is ran at the top level by an interpreter
● Monads composition must be linear● Arrows composition is not linear

AFRP Primitive Signal Functions
identity :: SF a a
constant :: n -> SF a b
integral :: SF Double Double
derivative:: SF Double Double
time :: SF a Time
arr2 :: (a -> b -> c) -> SF (a,b) c

Discrete Events
● Events can be user input as well as domain-specific sensors, interrupts, etc.
● Events are represented as signals of the Event datatype
Event a = NoEvent | Event a
edge :: SF Bool (Event ())
hold :: SF (Event a) a

Discrete events (2)
● Operations on event streams include– mapping, filtering, merging, etc.– Switching of reactive behavior (next slide)
tag :: Event a -> b -> Event b
mergeBy :: (a->a->a) -> Event a -> Event a -> Event a
accum :: a -> SF (Event (a->a)) (Event a)
after :: Time -> b -> SF a (Event b)
repeatedly :: Time -> b -> SF a (Event b)

Switching
● read as: 'Behave as sf1 until the first event in es occurs. Then bind the event value to e and behave as sf2.'
● Note: The time flow restart when switch is made into the new SF.
switch :: SF a (b, Event c) -> (c -> SF a b) -> SF a b
sf1 && es `switch` (\e -> sf2)

Switch Example
travel :: Distance -> Velocity -> SF Velocity Velocitytravel d v = switch (constant v &&& wayTooFar) (\_ -> constant 0)
where wayTooFar = integral >>> arr (>=d) >>> edge
switch :: SF a (b, Event c) -> (c -> SF a b) -> SF a b
(&&&) :: SF a b -> SF a c -> SF a (b,c)

Arrow Syntax
travel d v = forward `switch` stopwhere
stop _ = contant 0forward = proc iv -> do
td <- integral -< ive <- edge -< (td >= d)returnA -< (v,e)
● Preprocessor translate arrow symtax into Haskell with first, arr, (<<<) and loop Arrow operators

Switch Semantics
● Two questions arise about switching semantics:– Does the switch happen exactly at the event time, or
infinitesimally after?– Does the switch happen just for the first event, or for
every event in an event stream?
switch, dSwitch :: SF a (b, Event c) -> (c -> SF a b) -> SF a b
rSwitch, drSwitch :: SF a b -> SF (a, Event (SF a b)) b

Recursive Signal Functions● Suppose incrVel :: SF RobotInput (Event ()) generates
'commands' to increments the velocity of a robot.● concider:
vel :: Velocity -> SF RobotInput Velocityvel v0 = proc inp -> do
rece <- incrVel -< inpv <- drSwitch (constant v0) -< (inp, e `tag`
constant (v+1))returnA -< v● Note that vel is recursively defined, which requires:
– The use of the rec keyword– The use of a delayed switch (drSwitch)

Running the program
● To execute a program we need to connect the SF to the outside world
● Approximate the Continuous-time model
reactimate :: IO (DTime,a) -- sense-> (b -> IO ()) -- actuate-> SF a b-> IO ()

AFrob
Programming Robots with AFRP

AFrob
● AFRob is an EDSL - written in AFRP - for programming robots. It includes a robot simulator.
● AFRob models robots with two wheels and two independent motors. These are called SimBots.
● Each SimBot has a bumper switch, a range object finder, an animate object tracker.
● Each SimBot is controlled by a Signal Function
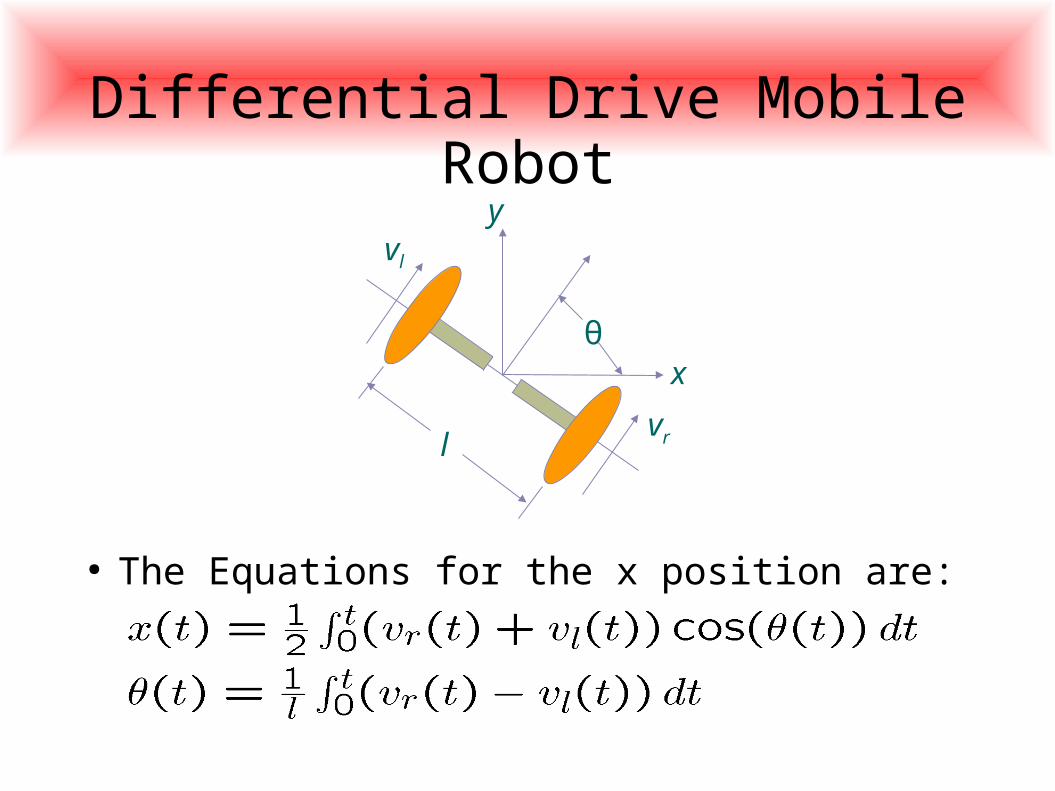
Differential Drive Mobile Robot
θ
l
vl
vr
y
x
● The Equations for the x position are:

Simbot X position
● Assume that:
xSF :: SF SimbotInput DistancexSF = proc inp -> do vr <- vrSF -< inp vl <- vlSF -< inp theta <- thetaSF -< inp i <- integral -< (vr+vl) * cos theta returnA -< (i/2)
vrSF,vlSF :: SF SimbotInput SpeedthetaSF :: SF SimbotInput Angle
● we can write x(t) in AFRP as:

Robot Input Signals
class HasRobotStatus i wherersBattStat :: i -> BatteryStatusrsStuck :: i -> Bool
class HasOdometry i whereodometryPosition :: i -> Position2odometryHeading :: i -> Heading
instance HasRobotStatus SimbotInputinstance HasOdometry SimbotInput

Robot Output Signals
class MergeableRecord o => HasDiffDrive o whereddBrake :: MR oddVelDiff :: Velocity -> Velocity -> MR oddVelTR :: Velocity -> RotVel -> MR o
class MergeableRecord o => HasTextConsole o wheretcoPrintMessage :: Event String -> MR o
mrFinalize :: MergeableRecord o => MR o -> omrMerge :: MergeableRecord o => MR o -> MR o -> MR o
instance HasDiffDrive SimbotOutputinstance HasTextConsole SimbotOutput

Robot Properties
class HasRobotProperties i whererpType :: i -> RobotTyperpId :: i -> RobotIdrpDiameter :: i -> LengthrpAccMax :: i -> AccelerationrpWSMax :: i -> Speed
instance HasRobotProperties SimbotProperties
● Static information about the capabilities of a robot

Robot Controllers
Type SimbotController = SimbotProperties -> SF SimbotInput
SimbotOutput
rcStop :: SimbotControllerrcStop rps = constant (mrFinalize ddBrake)
rcBlind :: SimbotControllerrcBlind rps =
let max = rpWSMax rpsin constant (mrFinalize $ ddVelDiff (max/2)
(max/2))
● A stationary simbot:
● A simbot that goes at ½ of the maximum speed:

Running in Circles
rcTurn :: Velocity -> SimbotControllerrcTurn vel rps = let
vMax = rpWSMax rpsrMax = 2 * (vMax – vel) / rpDiameter rpsin constant (mrFinalize $ ddVelTR vel rMax)
● A simbot that goes at ½ of the maximum speed:
● Simbots cannot turn arbitrarily fast – it depends on their speed. The maximum rotational velocity is:

Another Example Robot Controller
rdDumb :: RobotControllerrcDumb rps = proc sbi -> do
iAmStuck <- rsStuck -< sbirec let sig = (sbi, iAmStuck `tag` constant (-
velo)) velo <- drSwitch (constant maxVel) -< sigreturnA -< mrFinalize $ ddVelDiff velo velo
where maxVel = rpWSMax rps
drSwitch :: SF a b -> SF (a,Event (SF a b)) btag :: Event a -> b -> Event b
● A simbot which reverses when hitting something

Running in a Virtual World
runSim :: Maybe WorldTemplate -> -- virtual world SimbotController -> -- simbot A’s SimbotController -> -- simbot B’s IO () -- does the work
type WorldTemplate = [ObjectTemplate]data ObjectTemplate =
OTBlock { otPos :: Position2 } -- Square obstacle | OTVWall { otPos :: Position2 } -- Vertical wall | OTHWall { otPos :: Position2 } -- Horizontal wall | OTBall { otPos :: Position2 } -- Ball | OTSimbotA { otRId :: RobotId, -- Simbot A robot otPos :: Position2, otHdng :: Heading } | OTSimbotB { . . . } -- Simbot B robot

Demo Programmodule MyRobotShow whereimport AFrob -- AFrob libraryimport AFrobRobotSim -- the simulator
main :: IO ()main = runSim (Just world) rcA rcB
world :: WorldTemplateworld = ...
rcA, rcB, rcB1, rcB2:: SimbotControllerrcA = ... -- controller for simbot A’s
rcB rProps = case rpId rProps of -- controller for simbot B’s 1 -> rcB1 rProps -- (showing here how to deal 2 -> rcB2 rProps -- with multiple simbots)

● where r is the range-finder reading, d is the desired distance, and K
p and K
d are the
proportionate and derivative gains, respectively.
Follow the Wall
● To follow a wall, we use a range finder to sense the distance to the wall.
● It can be shown (for small deviations) that the rotational velocity should be:
More Robot Input Signals
class Has RangeFinder i whererfRange :: i -> Angle -> DistancerfMaxRange :: i -> Distance
-- derived range findersrfFront, rfBack, rfLeft, rfRight :: HasRangeFinder i => i -> Distance
instance HasRangeFinder SimbotInput
● A simbot has a range finder● A range finder finds the nearest object in a given
direction

Follow the Wall Controller
● This leads to the controller:
rcFollowLeftWall :: Velocity -> Distance -> SimbotControllerrcFollowLeftWall v d _ = proc sbi -> do let r = rfLeft sbi dr <- derivative -< r let omega = kp*(r-d) + kd*dr kd = 5 kp = v*(kd^2)/4 -- achieves “critical damping” returnA -< mrFinalize (ddVelTR v (lim 0.2 omega))

Systems with Dynamic Structure
● All objects are Signal Functions
● Objects can be added and removed
● We need combinators that can change the signal network at runtime
– So far we modelled systems where the signal network is static

Dynamic Collections in AFRP
● AFRP has special combinators for this purpose
parB :: Functor col => col (SF a b) -> SF a (col b)
par :: Functor col => (forall sf.(a->col sf->col (b,sf)))-> col (SF b c) -> SF a (col c)
pSwitch :: Functor col => (forall sf.(a->col sf->col (b,sf)))
-> col (SF b c) -> SF (a,col c) (Event d)-> (col (SF b c) -> d -> SF a (col c))-> SF a (col c)

Learn more?
● Look at the webiste– http://www.haskell.org/yampa/– http://www.haskell.org/frp/
● example application– The Yampa Arcade [Antony Courtney, Henrik Nilsson and John
Peterson, 2003]
– Robot Soccer (included in the yampa package)
Top Related