







Languages
Pages
Legal

A tool for nonlinear dynamic optimization
Arenberg Youngsters Seminar – October 10, 2018
Joris GillisPhD in electrical engineeringPost-doc at mechanical engineering MECO PMA MECH.∈. .∈.
“Everything is an optimization problem”
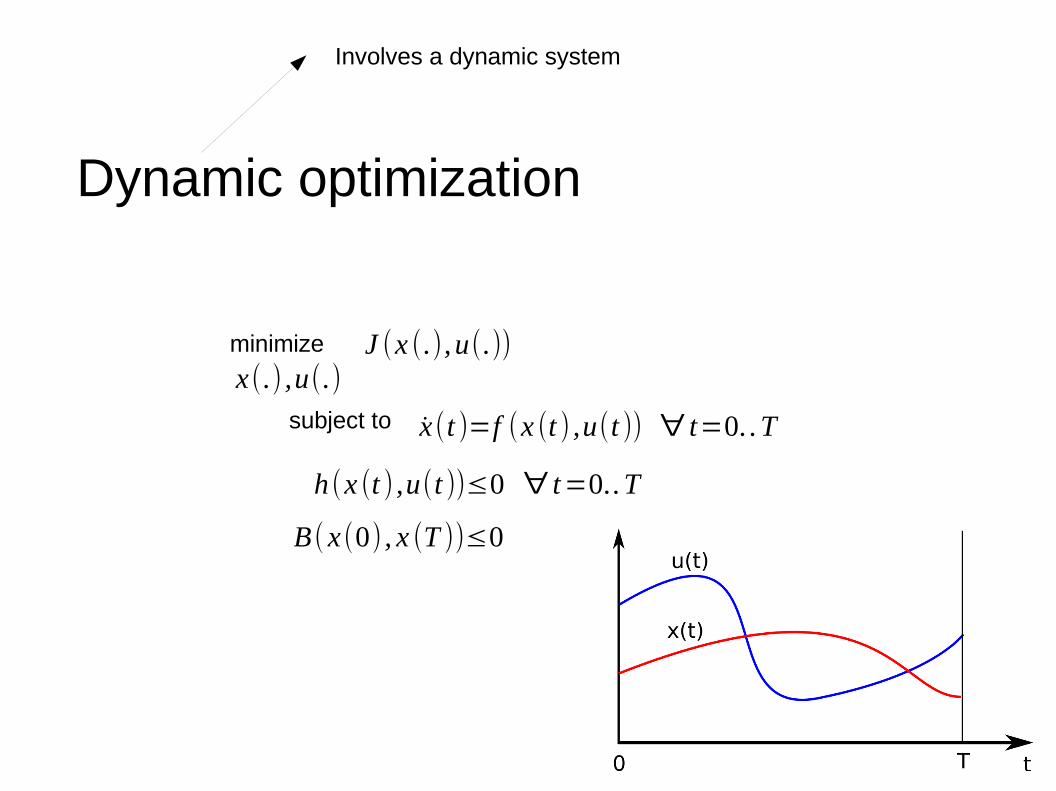
Dynamic optimization
J (x (.), u(.))minimize
x(.) ,u(.)
subject to x(t )=f (x (t ) ,u(t )) ∀ t=0. .T
h(x (t ) ,u(t ))≤0 ∀ t=0. .T
Involves a dynamic system
B(x(0) , x (T ))≤0
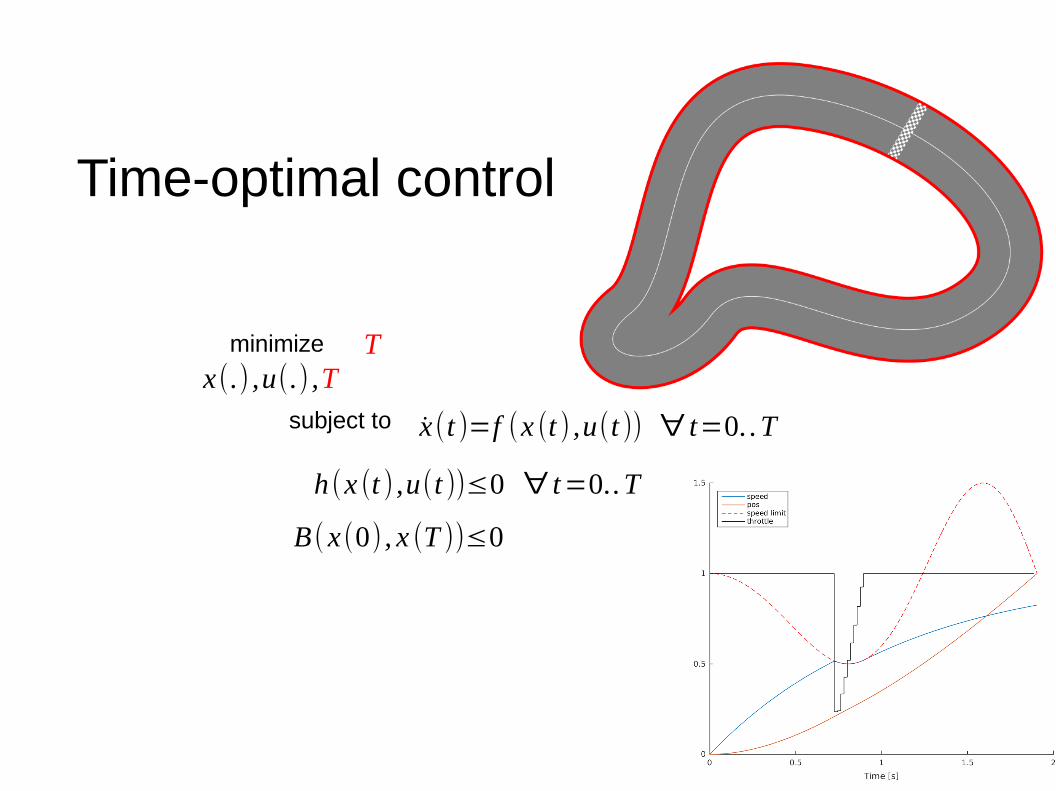
Time-optimal control
Tminimize
x(.) ,u(.) ,Tsubject to x(t )=f (x (t ) ,u(t )) ∀ t=0. .T
h(x (t ) ,u(t ))≤0 ∀ t=0. .T
B(x(0) , x (T ))≤0

Model predictive control (MPC)
J (x (.), u(.))minimize
x(.) ,u(.)
subject to x(t )=f (x (t ) ,u(t )) ∀ t=0. .T
x(0)= x0
h(x (t ) ,u(t ))≤0 ∀ t=0. .T
timeCurrent sample
Predict future controls
Find next control input

Moving horizon estimation (MHE)
∫−T
0‖y (x(t ))− y(t )‖2
2 dtminimizex(.)
subject to x(t )=f (x (t ) , u(t )) ∀ t=−T ..0
h(x (t ) , u(t ))≤0 ∀ t=−T ..0
timeCurrent sample
Fit the measurements
Find current state
u(t ) y (t )Observed outputApplied input

Offline parameter estimation
∫0
T‖y (x (t ))− y (t )‖2
2dtminimize
x(.) , p
subject to x(t )=f (x (t ) , u(t ) , p) ∀ t=0. .T
u(t ) y (t )Observed outputApplied input
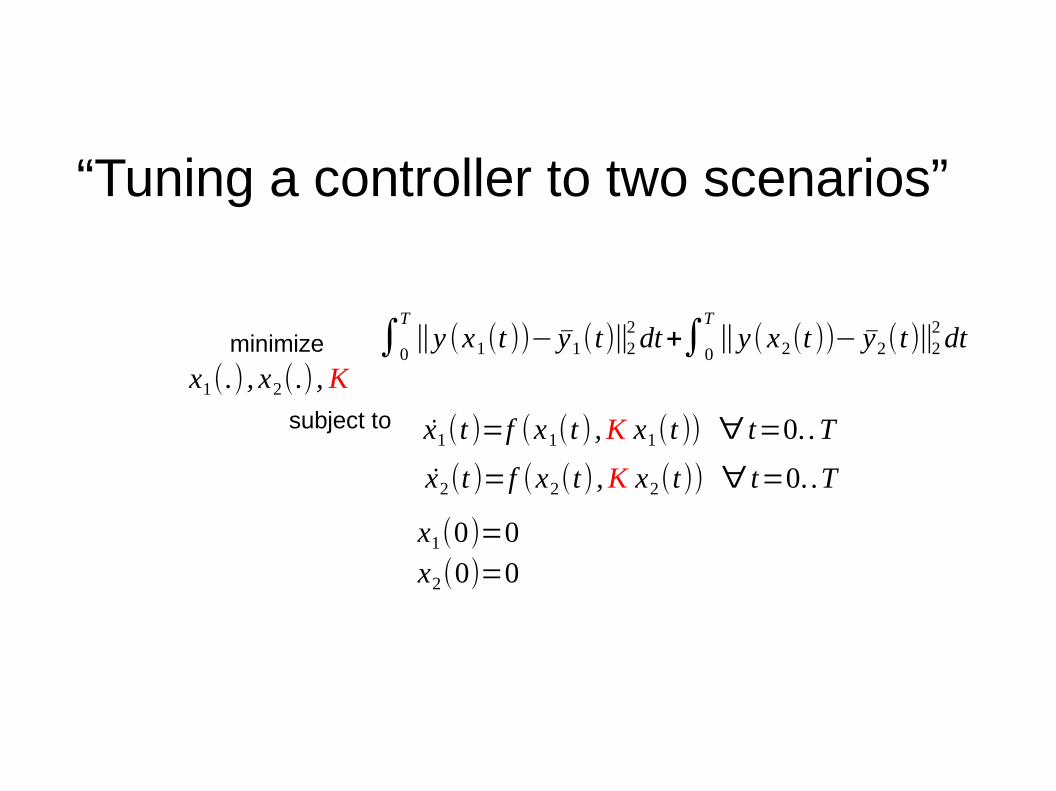
“Tuning a controller to two scenarios”
minimize
x1(.) , x2(.) , Ksubject to
∫0
T‖y (x1(t ))− y1(t)‖2
2 dt+∫0
T‖y(x2(t ))− y2(t)‖2
2 dt
x1(t )=f (x1(t ) , K x1(t )) ∀ t=0. .T
x2(t )=f (x2(t) , K x2(t)) ∀ t=0. .T
x1(0)=0
x2(0)=0

J (x (.), u(.), p)minimize
x(.) ,u(.) , psubject to x(t )=f (x (t ) ,u(t ) , p) ∀ t=0. .T
h (x (t ) ,u(t ))≤0 ∀ t=0. .T
B(x(0) , x (T ))≤0
System design

Especially true in engineeringEspecially true during a PhD
“Everything is a dynamic optimization problem”
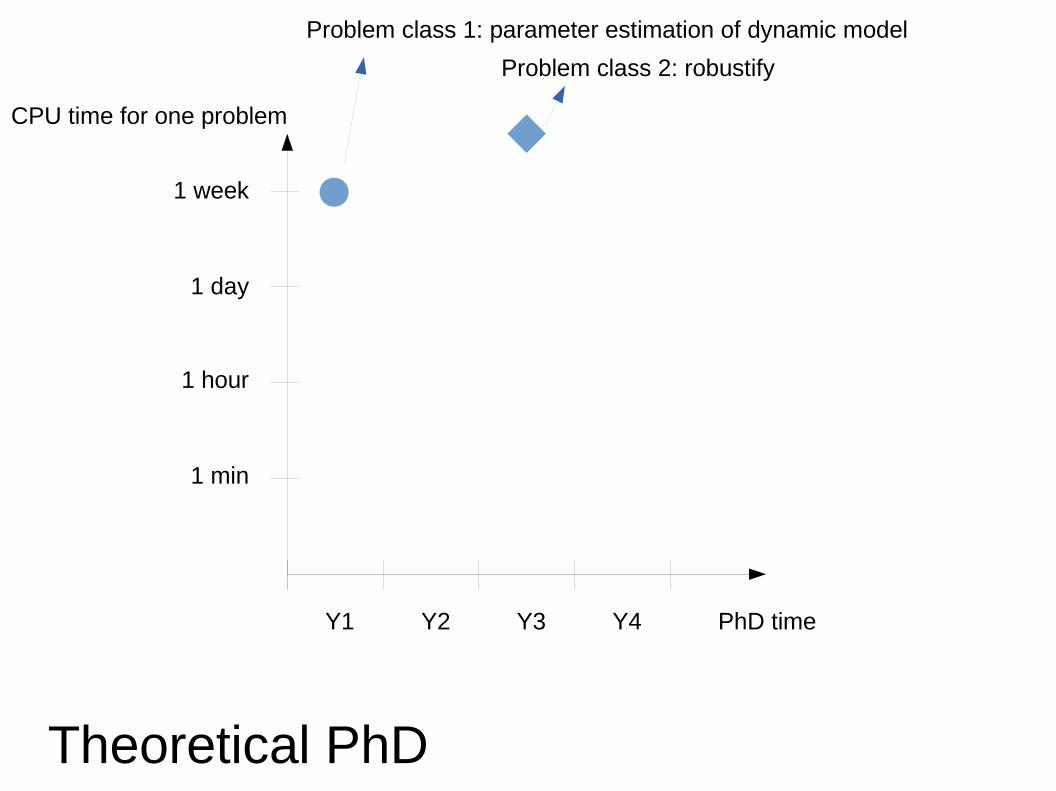
PhD timeY1 Y2 Y3 Y4
1 min
1 hour
1 week
1 day
CPU time for one problem
Problem class 1: parameter estimation of dynamic model
Problem class 2: robustify
Theoretical PhD

PhD timeY1 Y2 Y3 Y4
1 min
1 hour
1 week
1 day
CPU time for one problem
Practical PhD
Choice of solverSparsity exploitationExact derivativesImplementation in CParallelization

PhD timeY1 Y2 Y3 Y4
1 min
1 hour
1 week
1 day
CPU time for one problem
State-of-the-art
Numerical methods PhD
Toy problem

PhD timeY1 Y2 Y3 Y4
1 min
1 hour
1 week
1 day
CPU time for one problem
Universal PhD?
State-of-the-art
Time to work on applications/theory
Use powerful tools to make prototypes very fast
Dig a bit deeper for most interesting problem class
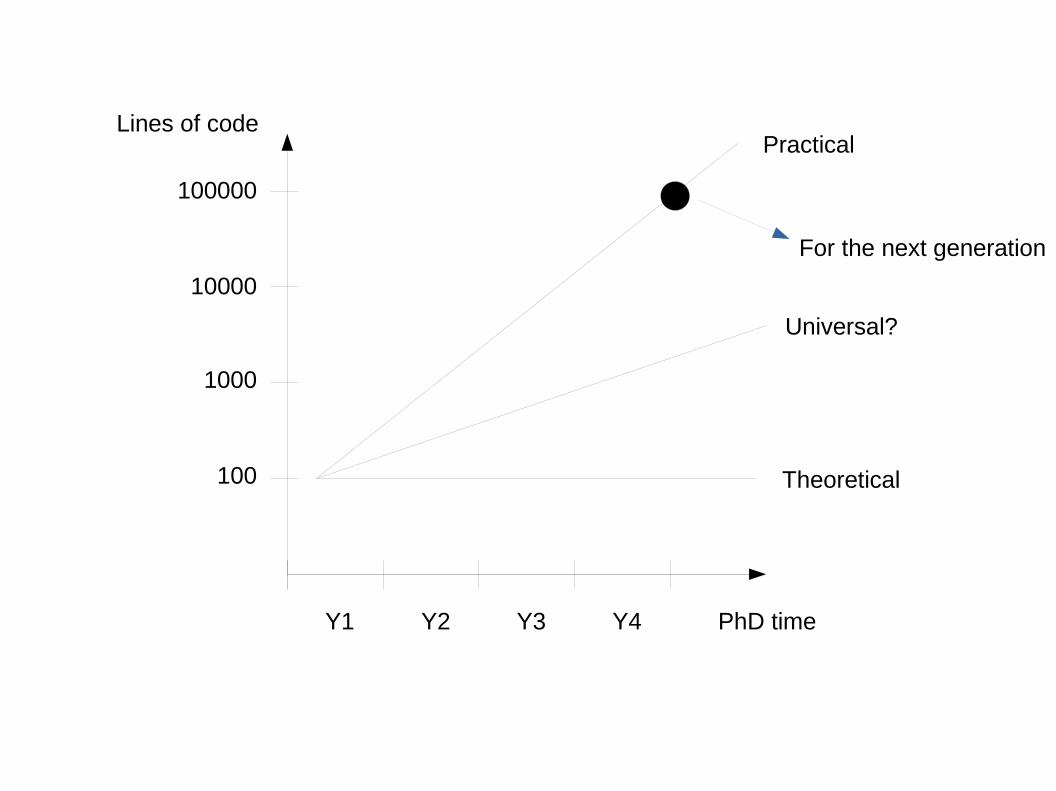
PhD timeY1 Y2 Y3 Y4
100
1000
100000
10000
Lines of code
Theoretical
Practical
Universal?
For the next generation
It is worthwhile to spend time looking for and learning software tools
What we do well: abstractions on theoretical level
What often is missing: abstractions on implementation level
Learn C/C++ Write a lot of code
Joel A. E. Andersson, Joris Gillis, Greg Horn, James B. Rawlings, Moritz Diehl,
“CasADi – A software framework for nonlinear optimization and optimal control,”
Mathematical Programming Computation, 2018.
Some application areas:
● Iceberg monitoring
● Bio-reactors
● Thermal control of buildings
● Wind energy
http://casadi.org Workshop http://leuven2018.casadi.org
Continuous decision variables
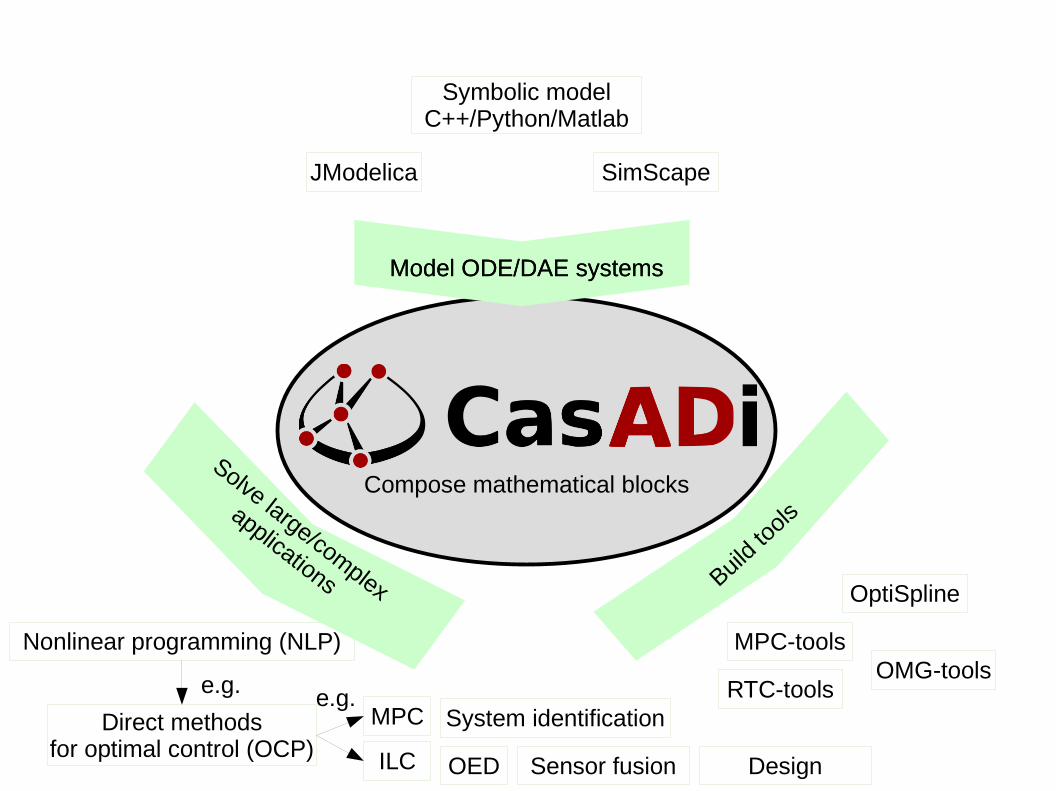
Compose mathematical blocks
JModelica SimScape
Symbolic modelC++/Python/Matlab
Nonlinear programming (NLP)
Direct methodsfor optimal control (OCP)
OptiSpline
MPC
ILC
Model ODE/DAE systemsModel ODE/DAE systems
Build
tools
Solve large/complex
applications
e.g. e.g.
MPC-tools
RTC-toolsSystem identification
OED
OMG-tools
Sensor fusion Design

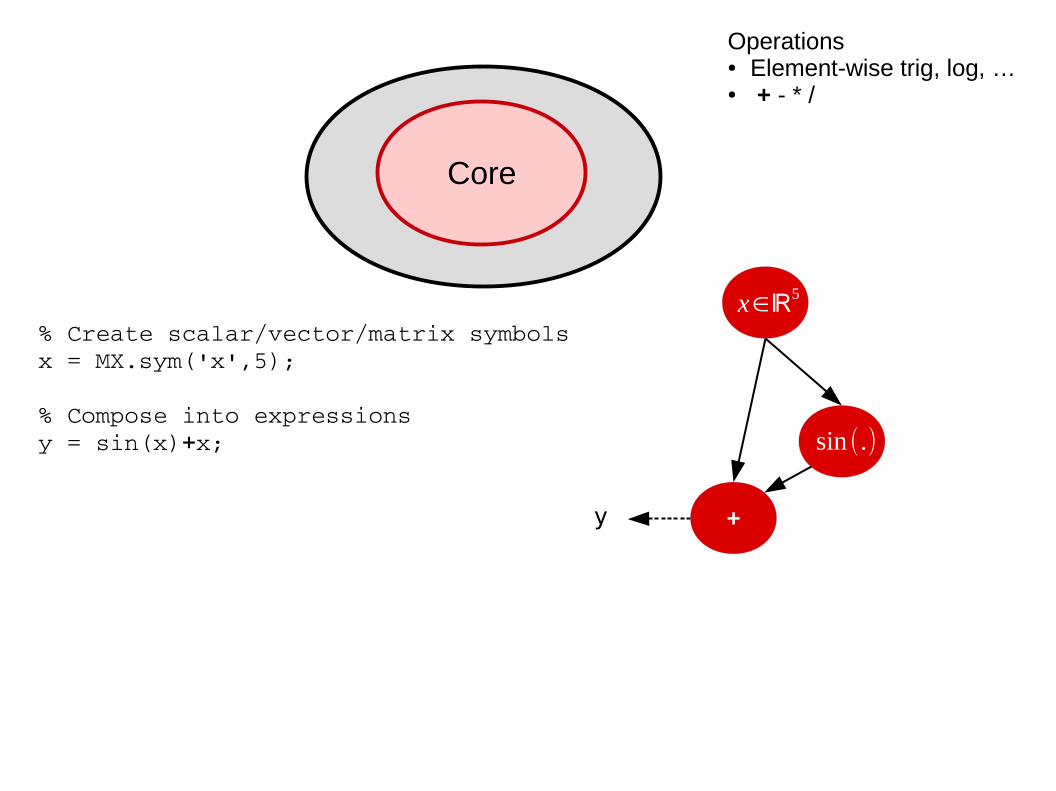
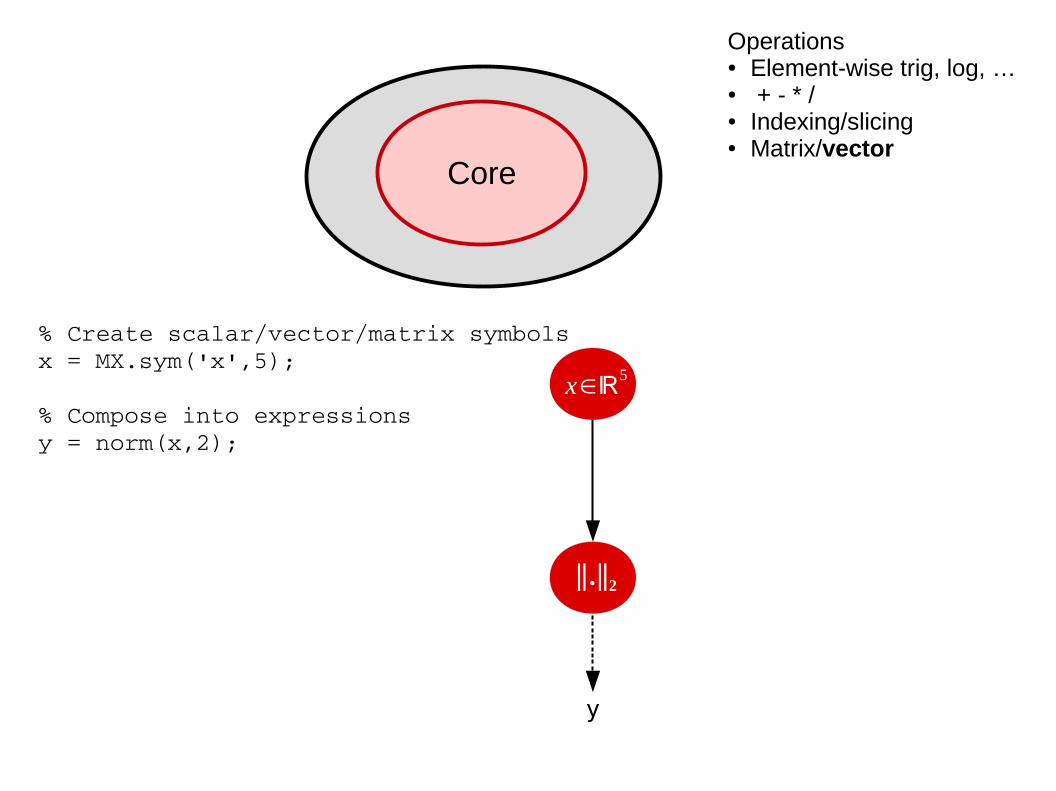
Core

Core
Operations● Element-wise trig, log, ...
% Create scalar/vector/matrix symbolsx = MX.sym('x',5);
% Compose into expressionsy = sin(x);
x∈ℝ5
sin (.)
. / .
y
Core
% Create scalar/vector/matrix symbolsx = MX.sym('x',5);
% Compose into expressionsy = sin(x)+x;
x∈ℝ5
sin ( .)
+
. / .y
Operations● Element-wise trig, log, …● + - * /
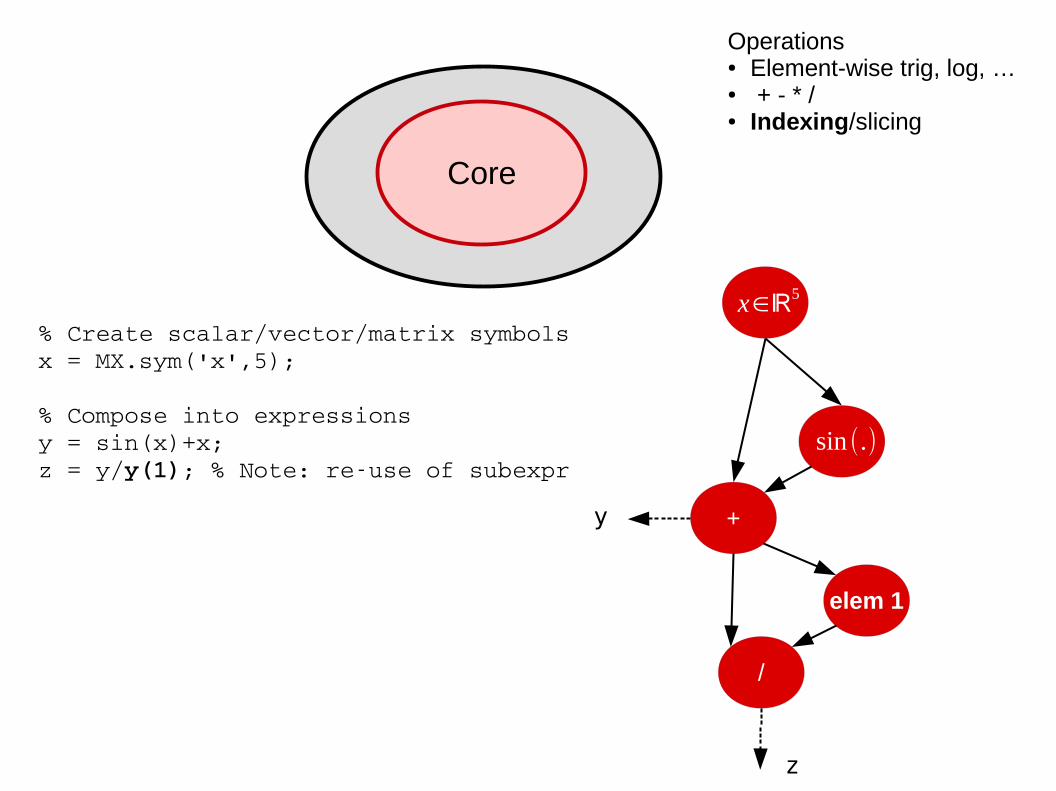
Core
% Create scalar/vector/matrix symbolsx = MX.sym('x',5);
% Compose into expressionsy = sin(x)+x;z = y/y(1); % Note: reuse of subexpr
x∈ℝ5
sin (.)
+
. / .
/
y
elem 1
z
Operations● Element-wise trig, log, …● + - * /● Indexing/slicing
Core
% Create scalar/vector/matrix symbolsx = MX.sym('x',5);
% Compose into expressionsy = norm(x,2);
x∈ℝ5
‖.‖2
y
Operations● Element-wise trig, log, …● + - * /● Indexing/slicing● Matrix/vector
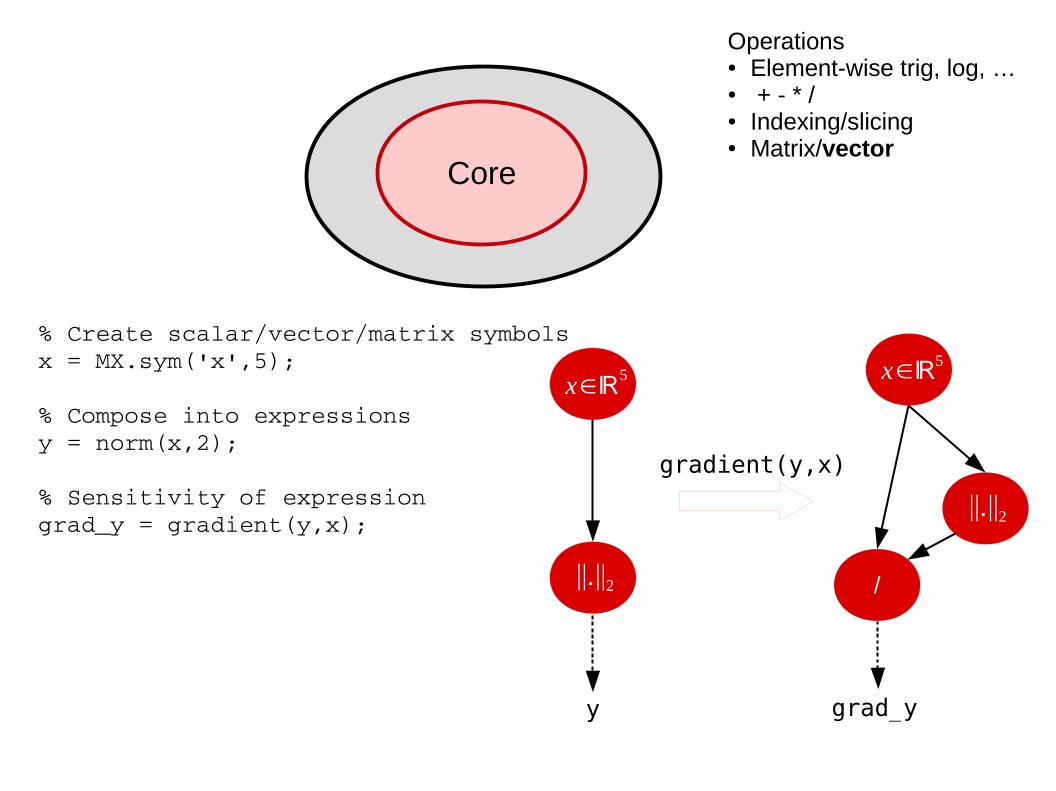
Core
% Create scalar/vector/matrix symbolsx = MX.sym('x',5);
% Compose into expressionsy = norm(x,2);
% Sensitivity of expressiongrad_y = gradient(y,x);
x∈ℝ5
‖.‖2
gradient(y,x)
x∈ℝ5
‖.‖2
/
. / .
y grad_y
Operations● Element-wise trig, log, …● + - * /● Indexing/slicing● Matrix/vector

grad_y = gradient(y,x);
CoreExpression graphs
Algorithmic differentiation

grad_y = gradient(y,x);
% Create a Function to evaluatef = Function('f',{x},{grad_y});f.generate('f.c');
CoreExpression graphs
Algorithmic differentiationC code-export (e.g. Matlab Mex/S-Function)

NLP
Conic
Integrator
Linea
r solve
Rootfinder
Interpolant
Custom
Expression graphs
Scalar Sparse matrix
Algorithmic differentiationC code-exportMulti-threadingMulti-processing
Lapack
Csparse
QPoases QRQP
HPMPC
Cplex
GurobiCLP
BlockSQP
SNOPT
IPOPT
SQP
Bonmin
Sundials Collocation Runge-Kutta
Newton
Kinsol
GPU mapreduce
Tensorflow
ADOLC
Linear
BSpline
WORHP
MA27

NLP ∂
Conic
Integrator ∂ ‡
Linea
r solve
∂ † ‡
Rootfinder ∂ ‡
Interpolant
∂ © † ‡
Custom
∂Expression graphs
Scalar Sparse matrix
∂ Algorithmic differentiation© C code-export† Multi-threading‡ Multi-processing
Lapack
Csparse ©
QPoases QRQP ©
HPMPC
Cplex
GurobiCLP
BlockSQP
SNOPT
IPOPT ‡
SQP ©
Bonmin
Sundials Collocation † Runge-Kutta †
Newton ©
Kinsol
GPU mapreduce
Tensorflow
ADOLC
Linear
BSpline
WORHP
MA27
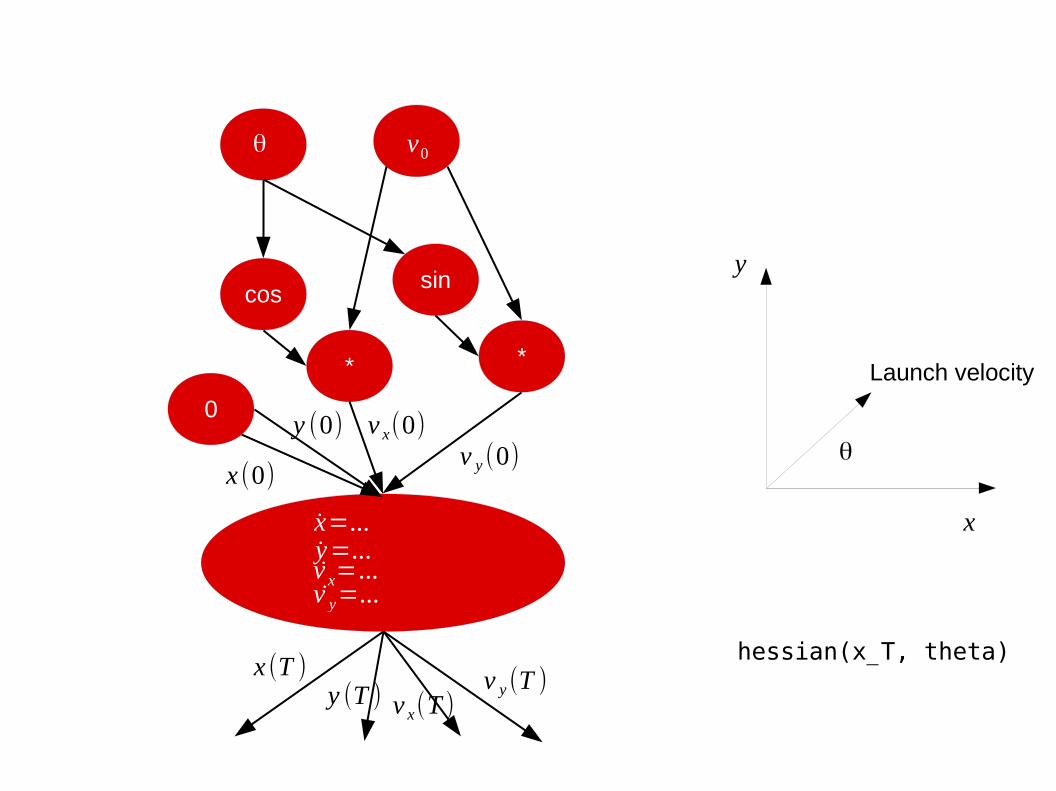
θ
x=...
hessian(x_T, theta)
v0
y=...v x=...v y=...
cossin
* *
0
x (0)
y (0) v x(0)v y (0)
x (T )y (T ) v x(T )
v y (T )
x
y
Launch velocity
θ
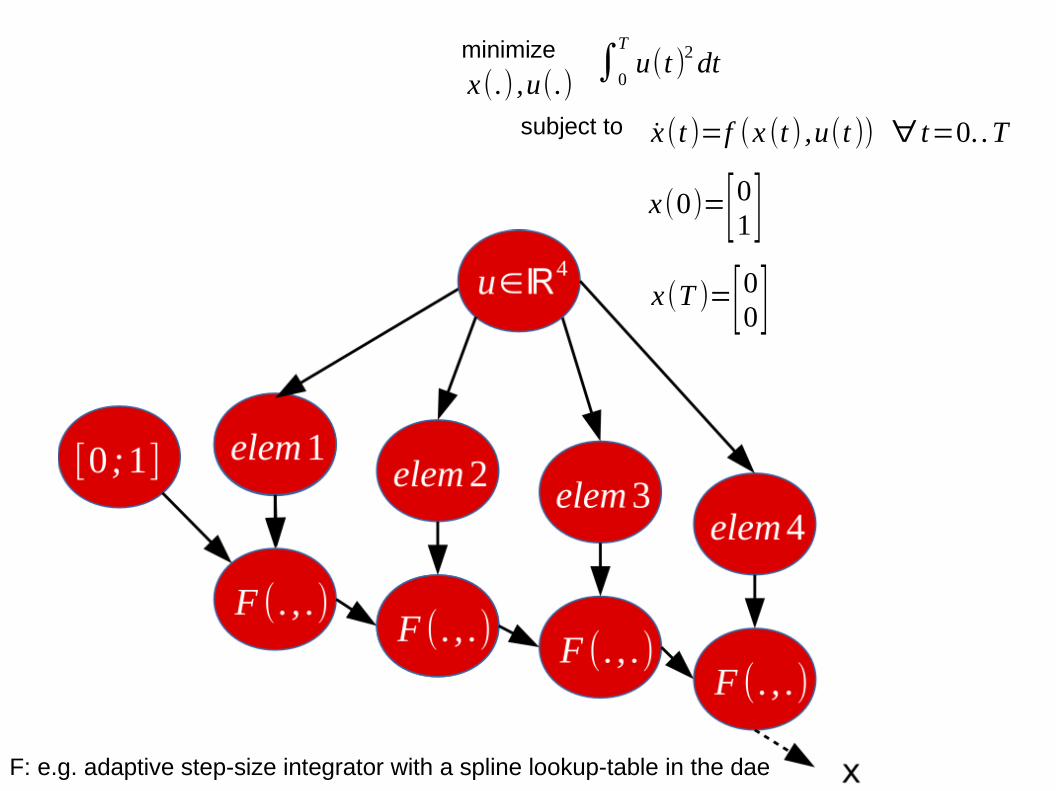
F: e.g. adaptive step-size integrator with a spline lookup-table in the dae
∫0
Tu(t )2 dtminimize
x(.) ,u(.)
subject to x(t )=f (x (t ) ,u(t )) ∀ t=0. .T
x(0)=[01]x(T )=[00]

u = opti.variable(N,1);
x = [0;1];for k=1:N x = F(x,u(k));end
opti.minimize(u'*u);opti.subject_to(x==0);
opti.solver('ipopt');
sol = opti.solve();
sol.value(u)
Example: single-shooting
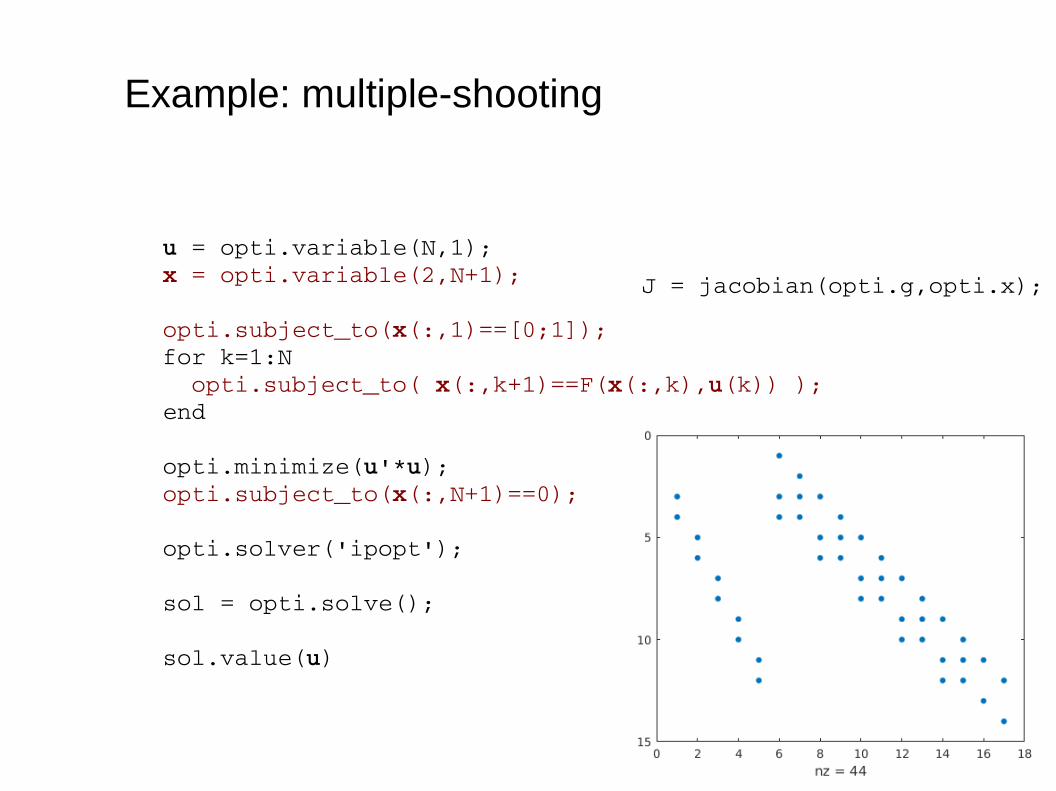
u = opti.variable(N,1);x = opti.variable(2,N+1);
opti.subject_to(x(:,1)==[0;1]);for k=1:N opti.subject_to( x(:,k+1)==F(x(:,k),u(k)) );end
opti.minimize(u'*u);opti.subject_to(x(:,N+1)==0);
opti.solver('ipopt');
sol = opti.solve();
sol.value(u)
Example: multiple-shooting
J = jacobian(opti.g,opti.x);
opti = casadi.Opti();
x = opti.variable(...);
Example: building tools on top
opti = OptiSpline();
f = opti.Function(...);
Decision variables: scalar/vector/matrix Decision variables: spline functions
● Open-souce LGPL● Multi-lingual: C++11/Matlab/Python● Build efficient optimal control solutions,
with minimal effort.Joel A. E. Andersson, Joris Gillis, Greg Horn, James B. Rawlings, Moritz Diehl,
“CasADi – A software framework for nonlinear optimization and optimal control,”
Mathematical Programming Computation, 2018.
http://casadi.org Workshop http://leuven2018.casadi.org
Top Related