William M. Humphreys, Jr. Thomas F. Brooks …...William M. Humphreys, Jr. Thomas F. Brooks William...
26
N i /V/'J /_A 5 _-/'_'_ _ /_" _-_>_ - 207321 AIAA 98-0471 Design and Use of Microphone Directional Arrays for Aeroacoustic Measurements William M. Humphreys, Jr. Thomas F. Brooks William W. Hunter, Jr. Kristine R. Meadows NASA Langley Research Center Hampton, VA 23681-0001 36st Aerospace Sciences Meeting & Exhibit January 12-15, 1998 / Reno, NV For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 1801 Alexander Bell Drive, Suite 500, Reston, Virginia 20191-4344 https://ntrs.nasa.gov/search.jsp?R=19980037002 2020-03-14T08:55:46+00:00Z
Transcript of William M. Humphreys, Jr. Thomas F. Brooks …...William M. Humphreys, Jr. Thomas F. Brooks William...

N i
/V/'J
/_A 5 _-/'_'_ _ /_" _-_>_- 207321
AIAA 98-0471
Design and Use of MicrophoneDirectional Arrays forAeroacoustic Measurements
William M. Humphreys, Jr.Thomas F. BrooksWilliam W. Hunter, Jr.Kristine R. Meadows
NASA Langley Research CenterHampton, VA 23681-0001
36st Aerospace Sciences
Meeting & Exhibit
January 12-15, 1998 / Reno, NV
For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics1801 Alexander Bell Drive, Suite 500, Reston, Virginia 20191-4344
https://ntrs.nasa.gov/search.jsp?R=19980037002 2020-03-14T08:55:46+00:00Z


AIAA-98-0471
DESIGN AND USE OF MICROPHONE DIRECTIONAL ARRAYS
FOR AEROACOUSTIC MEASUREMENTS
William M. Humphreys, Jr.*Thomas F. Brooks t
William W. Hunter, Jr.*Kristine R. Meadows _
Fluid Mechanics and Acoustics Division
NASA Langley Research CenterHampton, Virginia 23681-0001
Abstract
An overview of the development of two microphone
directional arrays for aeroacoustic testing is presented.These arrays were specifically developed to measureairframe noise in the NASA Langley Quiet FlowFacility. A large aperture directional array using 35flush-mounted microphones was constructed to obtainhigh resolution noise localization maps aroundairframe models. This array possesses a maximumdiagonal aperture size of 34 inches. A uniquelogarithmic spiral layout design was chosen for thetargeted frequency range of 2-30 kHz. Complementingthe large array is a small aperture directional army,constructed to obtain spectra and dircctivityinformation from regions on the model. This array,
possessing 33 microphones with a maximum diagonalaperture size of 7.76 inches, is easily moved about themodel in elevation and azimuth. Custom microphone
shading algorithms have been developed to provide afrequency- and position-invariant sensing area from10-40 kHz with an overall targeted frequency range for
the array of 5-60 kHz. Both arrays are employed inacoustic measurements of a 6 percent of full scaleairframe model consisting of a main element NACA632-215 wing section with a 30 percent chord half-span
*Research Scientist, Measurement Science and Technology
Branch, Senior Member AIAA.
*Senior Research Scientist, Aeroacoustics Branch, Assc_ate
Fellow AIAA.
*Senior Research Scientist, Measurement Science and
Technology Branch.
1Researdt Sdentlst, Aeroa_ustics Branch, Member AIAA.
Copyright O1998 bythe American Institute of_cs and
Astronautics, Inc. No copyright is asserted in the United States
under Title 17, U.S. Code. The U.S. Gov_t has a royalty-flee
liceme to exercise all rights under the copyright claimed herein for
govenunent _. All other rights are reserved by the copyrightOWt'ler.
flap. Representative data obtained from thesemeasurements is presented, along with details of thearray calibration and data post-p_ing procedures.
Nomenclature
Superscripto
AC
coD
fd
kM
MoPy
t
1/
w
W(k, £, £o)
source location
shearlayer amplitude correction,dBconstant
speedofsound,IVsec
SADA clusteraperture,seeeqn.(16)
steeringmatrix,seccqn.(13)
frequency, cycles/scc
cross spectral matrixcross spectra between ithandj _microphones, see eqn. (6)wavenumber (=c0/co), ft"ltotal number of microphones in arrayMath number (--v/co)pressure, Pascalsradialdistance, fl
time, sec
velocity,ft/sec
arrayshadingmatrix
microphonedusterweighting
theoreticalarrayresponseat
wavenumberk,dB,seeeqn.(4)
spectralwindow weightingconstantke_FFT datablockforis'andjth
microphones
location,fl
locationofphasecenterofarray,R,
see eqn. (3)
American Institute of Aeronauticsand Astronautics

G
C0
coat
acoustic wavelength, R
SADA array weighting controlfrequency, rad/sec
shear layer phase correction for co,radians,see eqns.(9)and(13)
Introduction
Over the past several years a growing need hasemerged for accurate and robust noise measurementinstrumentation in aerospace research facilities. Thisneed is partly driven by research programs such as theNASA Advanced Subsonic Technology (AST)
Program, which has set as one of itsgoalsthe
achievingofa greaterthan 10 dB reductionintotal
aircraft effective perceived noiseby the year 2000(referenced to levels measured in 1992). This goalrequires the collection of experimental databases ofvarious noise generation mechanisms from whichaccurate and efficient noise prediction tools can bedeveloped to guide noise reduction design. Recently,emphasis has been placed on the measurement andmodeling of airframe noise, defined as the non-propulsive component of aircraft noise which is due tounsteady flow about the airframe components (flaps,slats, undercarriage, etc.).
One of the databases desired by computationalairframe noise modelers is farfield noise data measured
on various baseline and modified aircraft components.
Traditional single microphone measurements of thisnoise have been hampered by poor signal-to-noisecharacteristics, spurring the development of a varietyof new measurement techniques. Early techniques
employed the concept of an "acoustic mirror", where alarge concave elliptic mirror and an associatedmicrophone were positioned in the acoustic far field. 1"_
Such mL,xors were capable of locating individual soundsources accurately, but suffered the drawback ofrequiring mechanical movement to determine sourcedistributions around models. The mirrors also became
excessively large when measurements of lower
frequencies (< 2 kHz) were required. Nevertheless,such mirrors continue to have applicability in some ofthe larger research facilities. 4
In addition to acoustic mirrors, distributions ofindividual microphones have been employed todetermineairframenoisesourcecharacteristics.In
particular,such systemshave provenvaluablein the
understandingof single-elementairfoilselfnoise.56
Whilenot strictlyconsidereda directionalarray(the
outputsof allmicrophoneswere not combinedas in
beamforming),such systems capitalizedon the
amplitudeand phaserelationshipsbetweenclustersof
microphones. As such, they can be considered one ofthe precursors to the current generation of microphonedirectional arrays.
Modem microphone directional arrays foraeruaconstic research have as their origin early radioand radarantennaarraysand U.S.Navy hydrophone
arrays (used for the detection of submarines as early asWorld War 11)._'s Soderman and Noble were amongthe first researchers to adapt this earlier work foraeroaconstics when they constructed a one-dimensionalend-fire array to evaluate jet noise in the NASA Ames40- by 80-foot Wind Tunnel. 9"1° At the same timeBillingsley and Kinns constructed a one-dimensionallinear array of microphones for real-time sound sourcelocation on full-size jet engines, n More recently _ch
directional arrays have been extended to include two-dimensional microphone layouts with the work ofBrooks, Marcelini and Pope 12"13, Underbrink and
Dougherty TM, and Watts and Mosher. 15q6Two different state-of-the-art, two-dimensional
microphone directional arrays are described in thispaper. These are designed to provide broadband sourcelocalization and directivity information needed tocharacterizeairframe noise and noise reduction
concepts. Both arrays have been successfidly used bythe authors to obtain data for a wing / flap model. 17
This paper expands on the previouswork by providingdetailed descriptions of the design and construction ofthe two directional arrays. The philosophysurrounding their design as well as development ofunique data processing algorithms to allow accuratenoisespectraand source imagesto be obtainedare
discussed.Finally, severalrepresentativeexamplesofdata collected with the instruments are illustrated.
Directional Array Development
Concept
The basic principleof a microphonedirectional
array can be simply illustrated.Assume a simple
monochromatic acoustic point source is located in
quiescent space at location _ (see Figure 1). Asolution for r>O representing the propagation of apressure wave radially in all directions is given by
p(r,t) = Cei(_'-k') (1)r
where C is a constant, r is the radial distance from the
source origin, co is the frequency of the wave, and k isthe corresponding wavenumber. Assume now that anarray of M microphones is placed a finite distance from
2American Institute of Aeronautics and Astronautics

the source. Each microphone senses a slightlydifferent phase-s_ wave.form depending on itsdistance from the source. The pressure pro(t) measuredat the m-th microphone is denoted as
C ya,(t-_)p.(t) = --e Co
rm(2)
where rm represents the distance from the location tothe m-th microphone. The (t-rJCo) term is theretarded time from the source to the microphone. Inorder to focus on a source, the individual microphoneoutputs can be phase shifted an amount equal to theirpropagation delay and then summed together (orstacked). This yields a single output signal for thearray in a process commonly referred to as delay-and-sum beamforming. By adjusting the propagationdelays, one is able to electronically steer the array topoints in space, selecting regions of interest toascertain noise production while providing noiserejection not found in individual microphonemeasurements. This steering can provide the samecapability as the earlier acoustic mirror techniques butwithout the necessity of physically moving the array tomeasure source distributions.
Array Response
The phase center of the array is defined as_s
1 M
m=-I
(3)
Using this, the ideal array response for a simple sourcecan be expressed as
M ¥oW(k,£,£°) -- _ wm-- e j_[(?-')-(r_-r-)]
(4)
where x is an arbitrary Cartesian location in space to
which the array is electronically steered, £°is the
source location, r ° and r om are the distances from the
source to _¢and the m-th microphone, respectively,
and r and r., are the distances from the steering
location to _¢and the microphone. The term w m
represents a microphone weighting factor which can beused to modify the array response.
The array response is normally expressed in
decibels referenced to the level obtained at ,_o :
(5)
This response is plotted as a contour map with contour
level proportional to O_(x-), representing the
computation of equation (5) over a large number of
steering locations lying on a surface a finite distancefrom the array. Such plots represent the spatial
filtering of the array graphically at wavenumber k, andallows one to examine the beamwidth and lobestructure.
Array Desien Criteria for AirframeNoise Measurements
Test Model and Facility: The test program isintended to investigate the mechanisms of soundgeneration on high-lift wing configurations. InFigure 2, the test model apparatus and the LargeAperture Directional Array, to be discussed, axe shownmounted in the Langley Quiet Flow Facility (QFF).The QFF is a quiet open-jet facility designedspecifically for anechoic acoustic testing. 19 For the
present airframe model testing, a 2 by 3-footrectangular open-jet nozzle is employed. The model isa NACA 632-215 main element airfoil with a 30percent chord half-span Fowler flap. In the photo, themodel is visible through the Plexiglas windows locatedon the side plates. The model section is approximately
6 percent of a full-scale configuration, with a mainelement chord length of 16 inches, a flap chord lengthof 4.5 inches, and a full span of 36 inches. The mainelement and flap are fully instrumented with staticpressure ports and unsteady pressure transducers. To
hold the model in place, the vertical side plates arefastened rigidly to the side plate supports of the nozzle.Appropriate acoustic foam treatments are applied to alledges and supports to reduce acoustic reflections fromthese surfaces. More model and facility details can befound in Reference 17.
Array Design Criteria: In choosing an arraydesign, specifically the microphone layout with respectto the noise source to be studied, one must be aware ofthe character of the source distributions. The basic
delay-and-sum beamformer procedure, describedabove, renders an array output which assumes anysingle source to be an omni-dircctional simplemonopole, or any distribution of sources to be that ofincoherent (uncorrelated) simple monopoles. But,when the sources are multi-pole and/or coherent over a
3American Institute of Aeronautics and Astronautics
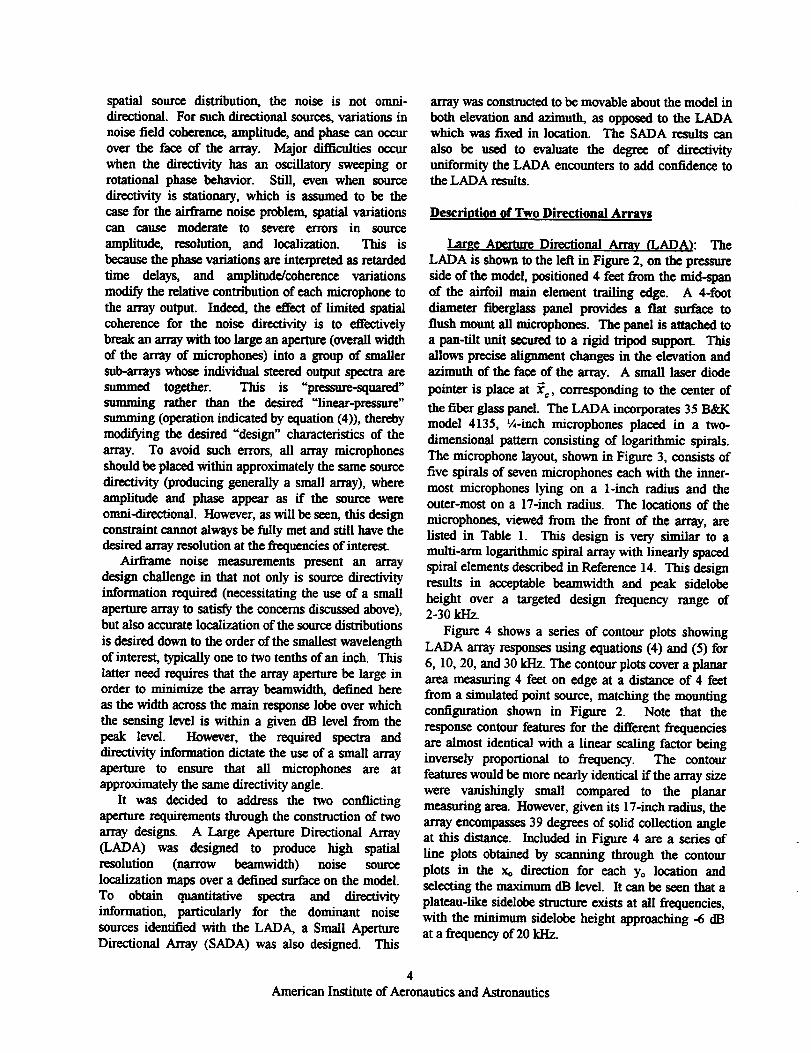
spatialsourcedistribution,the noiseis not omni-directional.Forsuchdirectional sources, variations innoise field coherence, amplitude, and phase can occurover the face of the array. Major difficulties occurwhen the directivity has an oscillatory sweeping orrotational phase behavior. Still, even when sourcedirectivity is stationary, which is assumed to be thecase for the airframe noise problem, spatial variationscan cause moderate to severe errors in source
amplitude, resolution, and localization. This isbecause the phase variations are interpreted as retardedtime delays, and amplitude/coherence variationsmodify the relative contribution of each microphone tothe array output. Indeed, the effect of limited spatial
coherence for the noise directivity is to effectivelybreak an array with too large an aperture (overall widthof the array of microphones) into a group of smallersub-arrays whose individual steered output spectra aresummed together. This is "pressure-squared"summing rather than the desired "linear-pressure"summing (operation indicated by equation (4)), therebymodifying the desired "design" characteristics of the
array. To avoid such errors, all array microphonesshould be placed within approximately the same sourcedirectivity (producing generally a small array), whereamplitude and phase appear as ff the source were
omni-direotional. However, as will be seen, this designconstraint cannot always be fully met and still have thedesired array resolution at the frequencies of interest.
Airframe noise measurements present an arraydesign challenge in that not only is source directivityinformation required (necessitating the use of a smallaperture array to satisfy the concerns discussed above),but also accurate localization of the source distributions
is desired down to the order of the smallest wavelengthof interest, typically one to two tenths of an inch. Thislatter need requires that the array aperture be large inorder to minimize the array beamwidth, defined hereas the width across the main response lobe over whichthe sensing level is within a given dB level from thepeak level. However, the required spectra anddirectivity information dictate the use of a small arrayaperture to ensure that all microphones are atapproximately the same directivity angle.
R was decided to address the two conflictingaperture requirements through the construction of twoarray designs. A Large Aperture Directional Array(LADA) was designed to produce high spatialresolution (narrow beamwidth) noise source
localization maps over a defined surface on the model.To obtain quantitative spectra and directivityinformation, particularly for the dominant noise
sources identified with the LADA, a Small ApertureDirectional Array (SADA) was also designed. This
array was constructed to be movable about the model inboth elevation and azimuth, as opposed to the LADAwhich was fixed in location. The SADA results can
also be used to evaluate the degree of directivityuniformity the LADA encounters to add confidence tothe LADA results.
Description of Two Directional Arrays
Large Averture Directional Array (LADA): TheLADA is shown to the left in Figure 2, on the pressureside of the model, positioned 4 feet from the mid-spanof the airfoil main element trailing edge. A 4-footdiameter fiberglass panel provides a flat surface toflush mount all microphones. The panel is attached toa pan-tilt unit secured to a rigid tripod support. Thisallows precise alignment changes in the elevation andazimuth of the face of the array. A small laser diode
pointer is place at _,, corresponding to the center of
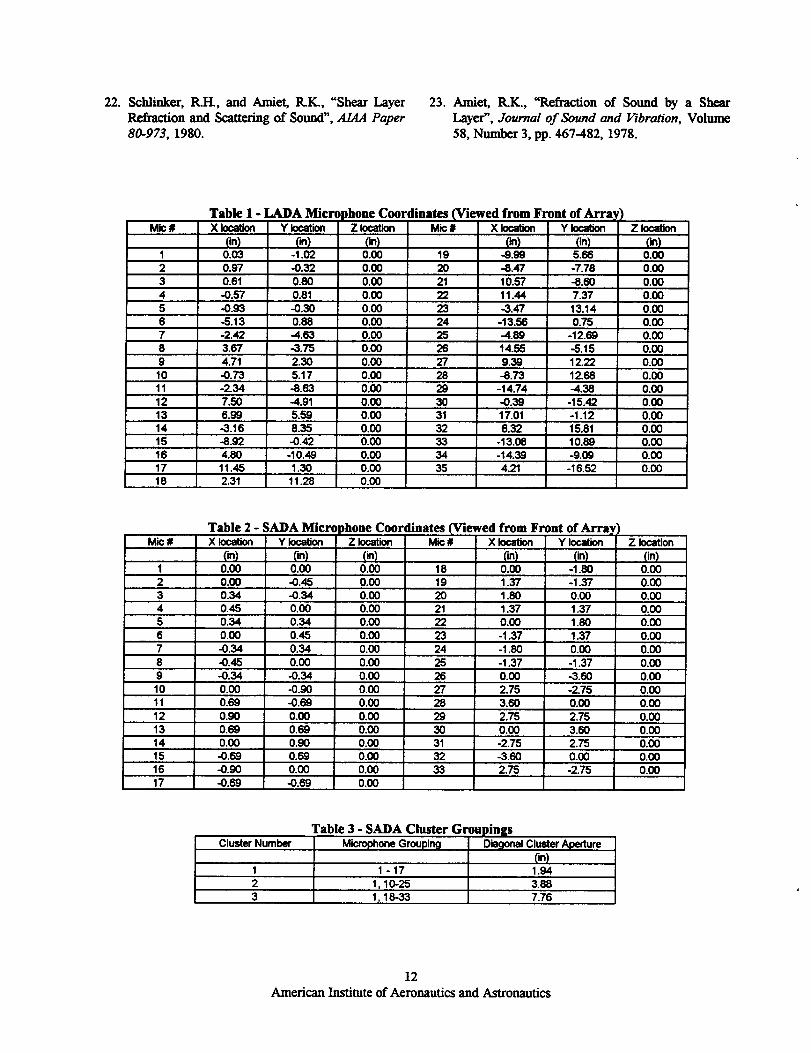
the fiber glass panel. The LADA incorporates 35 B&Kmodel 4135, _A-inch microphones placed in a two-dimensional pattern consisting of logarithmic spirals.The microphone layout, shown in Figure 3, consists offive spirals of seven microphones each with the inner-most microphones lying on a 1-inch radius and theouter-most on a 17-inch radius. The locations of the
microphones, viewed from the front of the array, arelisted in Table 1. This design is very similar to amulti-arm logarithmic spiral array with linearly spacedspiral elements described in Reference 14. This designresults in acceptable beamwidth and peak sidelobeheight over a targeted design frequency range of2-30 kHz.
Figure 4 shows a series of contour plots showingLADA array responses using equations (4) and (5) for6, 10, 20, and 30 kHz. The contour plots cover a planararea measuring 4 feet on edge at a distance of 4 feetfrom a simulated point source, matching the mountingconfiguration shown in Figure 2. Note that theresponse contour features for the different frequenciesarc almost identical with a linear scaling factor beinginversely proportional to frequency. The contourfeatures would be more nearly identical ffthe array sizewere vanishingly small compared to the planarmeasuring area. However, given its 17-inch radius, the
array encompasses 39 degrees of solid collection angleat this distance. Included in Figure 4 are a series of
line plots obtained by scanning through the contourplots in the xo direction for each 3,0 location andselecting the maximum dB level. It can be seen that a
plateau-like sidelobe structure exists at all frequencies,with the minimum sidelobe height approaching -6 dBat a frequency of 20 kHz.
4
American Institute of Aeronautics and Astronautics

A study of the beamwidth characteristics of theLADA can be achieved by observing a series of arrayresponses for a number of frequencies spanning arange of 2-30 kHz and measuring the width of themain lobe at various dB levels. Figure 5 shows a
family of curves where the main lobe width ismeasured at the -0.5, -1, -3, and -6 dB level. It can beseen from the curves that a typical -3 dB beamwidthfor the LADA is approximately 1.5 times the source
wavelength.
SmallApertureDirectionalArray(SADA): The
SADA isdesignedtocomplementthe capabilitiesof
the LADA by providingdirectivityand spectral
informationasafunctionofpositionaroundthemodel.
The apertureofthearrayiskeptsmallwiththeintent
to keep all microphones in the array withinapproximately the same source directivity regardless ofelevation or azimuth position. The array pattern whichwas chosen to achieve this can be seen in Figure 6,with the locations of the microphones given in Table 2.The SADA consists of 33 B&K model 4133, 1/8-inch
microphoneswith ¼-inch preamplifiersprojectingfrom an acousticallytreatedaluminum flame. The
arraypatternincorporatesfourirregularcirclesofeight
microphoneseachwithone microphoneplacedat xc,
correspondingtothecenterofthearray.Eachcircleistwice the diameter of the circle it encloses. The
maximum radiusofthearmy is3.89inches,givingthe
SADA only5.25% ofthesurfaceareaoftheLADA.Two smalllaserdiodepointersareincorporatedinto
the arraymount on oppositesidesof the center
microphone for use in alignment.The SADA is mounted on a pivotal boom designed
to allow it to be positioned to a wide range of elevationand azimuth angleswhile maintaininga constantdistancetothecenterofthetrailingedgeofthemain
elementairfoil(anassumednoiseproductionregion).
This is achievedby maintainingthe boom's pivot
centeratthetrailingedgeofthemain elementairfoil.
Rotationoftheboom isperformedusingprecisionDC
servo rotation stages mounted on the outer edges of the
side plates holding the model and boom. This isillustratedin Figure7, which shows the SADA
mountedintheQFF on thesuctionsideofan airframenoisemodel at a 5-footworkingdistance.At this
distancethearrayencompasses7.5 degreesof solid
collectionangle.
Figure8 shows a seriesof contourplotsshowingSADA array responses using equations (4) and (5) for10, 20, 30 and 40 kHz. Subsequently, a processing
procedure is used to maintain constant spatialresolution, independent of frequency; however, this is
not done in the calculations of Figure 8. The contour
plots cover an area measuring 4 feet on edge at adistance of 5 feet from a simulated point source,
matching the mounting configuration shown inFigure 7. A series of line plots obtained from thecontour plots in a process similar to that for the LADAare also shown in Figure 8. It can be seen that the
sidelobe patterns again exhibit a plateau-like structureat all frequencies, with the maximum sidelobe levelapproaching -8 dB at a frequency of 40 kHz.
A study of the beamwidth characteristics of theSADA can be performed similarly to that for the
LADA by observing a series of array l"¢sponses over afrequency range and measuring the width of the mainlobe at various dB levels. Figure 9 shows such a
beamwidth plot. A family of curves is shown wherethe main lobe width is measured at the -0.5, -1, -3, and-6 dB level. It can be seenfrom these curves that a
typical 3 dB beamwidth for the SADA isapproximately 11 times the source wavelength. It willbe seen subsequently that this beamwidth can beradically altered through the use of microphone
shading (or weighting).
Measurement System
Data Acquisition:The dataacquisition/ analysis
systememployed for both arraysis illustratedin
Figure 10. Acquisition hardware consists of a NEFF495 transient data recorder which is controlled by a
DEC AXP3400 workstation. Sampling rate iscontrolledby an externalclock operatingat142.857kHz. The maximum allowableclockrateisI
MI-Iz. The use of an external clock allows
simultaneous acquisition with other instrumentationsuchasthe model unsteady surface pressuresensors,asdescribed in Reference 17. The NEFF system
incorporates 36 12-bit (including sign bit) acquisitionchannels with each channel possessing a 4 megabyte
buffer, allowing up to 2 million 2-byte samples to becollected per acquisition. The signals from eachmicrophone channel are conditioned by passing themthrough high pass filters set to 300 Hz (to remove DC,60Hz linenoise,and low frequencyinterferencenoise)
and through anti-aliasing filters set at 50 kI-Izwhich issubstantially below the 71.43 kHz Nyquist frequency.
Custom software is used to control all aspects of thedata acquisition. The output files generated by the
acquisition system are written in NetCDF format toprovideplatform-independentstorageof the data,afeaturemandated by the distributed data analysissystem. 2° The NetCDF files are archived on the NASALangley Distributed Mass Storage Subsystem for post-test retrieval and processing. 21
5American Institute of Aeronautics and Astronautics

A typical acquisition run consists of collecting 36channels (array microphones pins additional referencemicrophones) of data under no flow conditions. This isfollowed by the actual data nm under a specific flow orcalibration condition. As will be seen, _ecwa obtainedfrom the background runs are subtracted from spectraobtained from data runs to remove the noise floor inthe measurements.
Data Analysis: It was desired to build a highly
distributed processing configuration to handle theproblem of array analysis given the volume of datainvolved (greater than 500 Gbytes) and the amount oftime required to process a single test point of data fromstart to finish (typically 30-60 minutes per set on a200-MHz Pentium-Pro machine). There are a number
of various platforms and operating systems used in theprocessing of the array data, including a cluster ofthree 200-MHz NT-based Pentium-Pro workstations, a
500-MHz Alpha workstation running UNIX, and theLangley SP2 supercluster consisting of 48 IBMRS/6000 workstations. This heterogeneous cluster ofhardware systems is controlled from a single Pentium-Pro workstation using a custom control panel programand a series of device independent configuration filesreadable by the individual processing codes located oneach of the various hardware platforms.
Data Post-Processing Procedure
Processing steps common to both arrays include theconstruction of cross spectral matrices from the rawtime data and the calculation of amplitude and time
delay corrections to account for shear layer refraction.Classical beamformer processing algorithms areutilized in the generation of noise images, spectra, anddirectivity information. In addition, the SADAprocessing incorporates a unique shading algorithm
which provides a constant beamwidth independent offrequency.
Computation of Cross Spectral Matrices: AnM byM cross spectral matrix, where M is the totalnumber of microphones in the array, is firstconstructed for each data set (both background and_e component test condition). The formation ofthe individual matrix elements is achieved through theuse of Fast Fourier Transforms (FFT). This is done
after convening the raw data to engineering units(Pascals) using sensitivity data based on a microphonecalibration using a frequency of 1 kHz. Each channelof engineering unit data is then segmented into a seriesof non-overlapping blocks each containing 8192samples, yielding a frequency resolution of 17.45 I-Izfor the 142.857 H-Iz acquisition sampling rate. Using
a Hamming window, each of these blocks of data isFourier transformed into the frequency domain. Theindividual upper triangular matrix elements plus thediagonal (representing auto spectra for each arraymicrophone) are formed by computing thecorresponding block-averaged cross spectra from thefrequency data using
= G22 • :
*°
(6a)
with
N
l zt=l[X_(f)Xit(f) ]=(6b)
where W_is the data window weighting constant, N isthe number of blocks of data, and A_"represents an FFTdata block. The lower triangular elements of thematrix are formed by taking the complex conjugates ofthe upper triangular elements (allowed because thecross spectral matrix is Hermitian).
All cross spectral matrix elements are employed insubsequent processing, with no modification of thediagonal terms. Note that for in-flow arrays, thediagonal terms can be removed to improve the spectraldynamic range by subtracting off seLf-noise dominatedauto-spectra during the beamforming process, asdescribed in References 14 through 16. However, forthe airframe noise measurements described here, this
step was not required since all array microphones areoutside of the flow.
3-D Shear Layer Refraction Correction: Testing inan open-jet facility requires that the effect of the shearlayer on the propagation of the noise (both intensityand retarded time) from sources located in the jet tomicrophones located outside the jet be accounted for.The first challenge was to develop a technique fordealing with the highly three dimensional, curvedshear layer present in the installation. The approachtaken was to acquire five-hole pitot probemeasurements on both the pressure and suction sides ofthe airframe model to map out the velocity field. Theshear layer position was defined to be the half meanvelocity position. This data was then fitted with athree dimensional surface to provide a continuousrepresentation of the shear layer for each of the flowconditions examined. With the shear layer positiondefined, amplitude and phase corrections were
6American Institute of Aeronautics and Astronautics

determinedusingthe approachof SctdinkerandAmiet= andAmie_.
Thekeyto findingthe retarded time and phasecorrections is to find the intersection of the source ray
path with the shear layer, as illustrated in Figure 11.An iterative process is used, using the followingrelationship between the source emission angle, qh, the
ray angle, 0, and the free jet Mach number, Mo
tan(O) = sin(_,_)Mo +cos(¢,_) (7)
and SneU's law
cos(_h)cos(q,2) =
1+ Mo cos(_] ) (8)
where the subscripts 1 and 2 refer to angles inside andoutside of the jet, respectively, and the sound speedsinside and outside the jet are assumed equal. Once theray path-shear layer intersection is known, the retardedtime difference and hence the phase can be computedfrom
k co ) (9)
where r_=r_+r2 is the wavefront travel distance(relative to the convecting flow inside the je0, and r=i¢
is the line-of-sight distance from the source to themicrophone.
The amplitude corrections are based upon analysisof a rectangular shear layer. There are two correctionsprovided in Reference 22, namely a thick shear layer(high frequency) correction and a thin shear layer 0owfrequency) correction. The appropriate correction isdetermined by the ratio of the source acousticwavelength to the shear layer thickness. Theassumption in developing the thick shear layercorrection is that the shear layer is sufficiently thick for
geometricalacousticsto apply so that (1) the acousticenergy is conserved along the ray tube, and (2) soundpressure is the result of outgoing waves only sincereflections are absent in the geometrical acousticslimit. As supplied in References 22 and 23, the ratio ofthe corrected to measured sound pressure formicrophone m, including the astigmatism and distancecorrection, is found to be
".'_w2 ,',"_ _in(,,2)P= (10)
with
= 3/(1_ Mo c0s(_2))2 _ c0s2(_2 )
sin 0_cO_1 --
sin _2
6 2 = E/ I3]h -1 +1r_c sin 0_c
(II)
wherepc is the correctedpressure,]7= is the measuredpressure,h is the distance from source to shear layer,and 0.,_ is the measured angle of the microphonerelative to the flow direction.
For the low frequency correction, the reflected waveamplitude cannot be neglected when the wavelength isof the same length as the shear layer thickness. In this
case the amplitude correction is found to be
_ Pc _] 2
P=
[_@_ + (1- Mo cos(¢,O)21 (12)
Examples of the calibration and use of the shearcorrection algorithms are shown subsequently.
Beamforming: A classical beamforming approachis used for the analysis which eliminates instabilitiesand potential matrix singularity problems found inadaptive techniques. The basic procedure consists ofelectronically steering the array to a predefined seriesof locations in space, as shown in Figure 12. Theselocations define a plane which can be positioned in anyorientation in front of the array. For each selected
steering location, a steering matrix containing oneentry for each microphone in the array is computed asfollows:
(13)
where x is the distance from the steering location toeach microphone, Am is the shear layer amplitudecorrection for microphone m using either equation (10)
7American Institute of Aeronautics and Astronautics

or (12), and oJdt_,s,_, is the shear layer phasecorrection for microphone m at frequency oJ. Thefactor (r°/r, °) is included to normalize the amplitude
An, to that of the array xc position. Using
equation (13) and the cross spectral matrix computedp_ciously, the steered array output power spectnLm atthe steering location is obtained via
P(_) =M" (14)
where the T denotes the conjugate transpose of thematrix. Note that a background subtraction process isexplicitly denoted in equation (14). The backgroundspectra is that obtained without tunnel flow, where theacquisition system noise dominates the recordedoutput. The division by the number of microphones Mserves to reference the array output spectrum levels toequivalent single microphone output levels.Equation(14) represents the steered response powerspectrum over the full range of single narrowbandfrequencies. If a wider bandwidth is desired (such asan Octave Band), the power (pressure-squared values)of the narrowbands is summed. Note that wider
bandwidths are not formed prior to the completion ofthe vectorial (or complex) operations of equation (14).This prevents possible significant bias errors insumming across phase-shifted cross spectral bands.
SADA Shading Algorithm: The use of the SADAfor directivity and spectral measurements requires thatthe beamwidth he invariant under steering angle andfrequency changes, thereby providing a constantsensing area over noise source regions. The method
used to accomplish this is similar to previoustechniques described in Reference 12 and 13. TheSADA microphones are divided into three clusterscontaining 17 microphones each. These clusters alongwith their maximum diagonal aperture sizes are shownin Table 3. Each cluster exhibits the same directional
characteristics for a given wavenumber-length productkD_, where k is the wavenumber and D, is the diagonaldistance between the elements of the n-th cluster. The
method used to achieve the invariant sensing areaconsists of shading (or weighting) the array clusters asa function of frequency. The microphone clustershadings are calculated as follows:
w t =0 ]w 2 =0
w 3 =1
0-1<0 and ty2 <0
W 1 = 0 -0.875
W 2 = 1-- 0 0.875
w3=0
wl=0
W2 ---- 0-0.875
W3 = 1-- 0-O.875
w_=l
W2 =0
w 3 =0
0 <o-_ <1
0<or 2 <1
0-1>1 and 0-2 > 1
(15)
with the shading coefficients defined by
kD2 - kDo_=
0-2=(16)
The value of kD0 for this study is 36.38, correspondingto frequencies of 10, 20, and 40 kHz for clusters 3, 2,and 1, respectively (assuming a speed of sound of1126 fl/sec). This causes the SADA to yield the sameeffective resolution for all frequencies hetween 10 and40 kHz, with smooth blending among frequencies.The exponent of the coefficients, 0.875, was found todiffer slightly from the array of References 12 and 13.
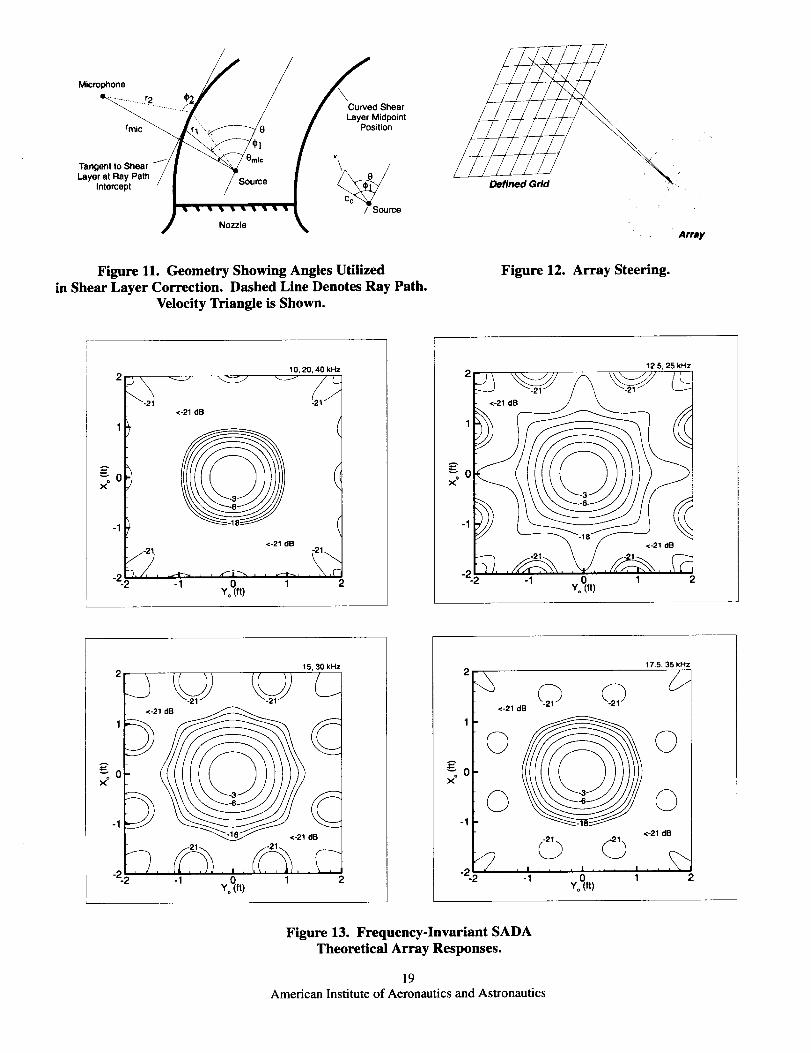
Figure 13 illustrates modified theoretical array
responses for the SADA for frequencies of 10, 12.5, 15and 17.5 kHz, using equations (4) and (5) with the
shadings of equation (15) substituted for thew,_ term.
Comparing the responses with those shown inFigure 8, note that the responses for 10, 20, and40 kHz are now identical, as are the ones for 12.5 and
25, 15 and 30, and 17.5 and 35 kHz. This clearlyillustrates the fiequency-invariant main and side lobestructure now exhibited by the array. Figure 14 showsa beamwidth plot for the shaded array. At higherfrequencies the beamwidth, while invariant, now takeson the value exhibited at the kDs wavenumber-lengthproduct. In a sense the higher frequency beamwidthshave been sacrificed to achieve frequency invariance.This is an acceptable trade-off; however, since accuratesource directivity data can only be obtained over abroad frequency range ff the sensing area of the arrayis held constant.
To extract noise spectra and directivity from dataobtained with the SADA, the classical beamfonningtechnique is employed with minor variations. First, asingle steering location is chosen for the array, whichis itself positioned at various elevation and azimuth
8American Institute of Aeronautics and Astronautics

angles with respect to the model. A modified versionof equation (14) is used to compute the weightedsteered response power for the array at the fixedsteering location via
= M_.. W m
rail (17)
where ]_ is a row matrix containing the set of
shadings computed in equation (15). The sum over themicrophone shading terms in the denominator isobtained fzom equation (15) as a function of frequency(this sum always equals 17 for the present SADAapplication). Note that this formulation of thebeamformer equation is identical to that for the LADA
ffone assumes an identity matrix for W.
Array Calibration and Applications
Careful calibrations are conducted for both arraysystems. These tests axe designed to check fordeviations between experimental and theoretical arrayresponses which can be attributed to microphonesystem response differences, installation effects, orproblems in the data analysis algorithms.
Injection Calibration: Injection calibrations areperformed for the SADA. These calibrations consist ofinserting a known signal simultaneously into allmicrophone channels in order to detect microphonesensitivity and phase drift. Both pure tones and whitenoise are used. This is accomplished without physicaldisruption of the system. Inspection of cross spectralphase between all pairs of microphones allowsdiscrepancies to be easily identified and corrected.Also, sensitivity drift can be corrected without the need
to perform a full microphone calibration before eachrun. Nevertheless, standard SADA microphonecalibrations are also performed daily because of readyaccessibility.
Isolated Point Source: A series of static calibration
tests are performed by placing an isolated point sourcedirectly in front of the array at the operational workingdistance (4 feet for the LADA, 5 feet for the SADA).The point source consists of a tube with one or moreacoustic drivers mounted on the back end. The openend of the tube is intended to provide an omni-directional sound source. Noise measurementsare
obtainedacrossa broadfrequencybandthoughtheuse
of white noise. These are compared with
corresponding theoretical array responses usingequations (4) and (5).
Figure 15 shows a series of LADA point source noiseimages taken at identical frequencies to the theoreticalones shown in Figure 4. Figure 16 shows thecorresponding measured beamwidths which can becompared with Figure 5. At the higher frequenciessome discrepancieswere indicatedbetween the
theoretical and experimentalsidelobe shapes (mostlikelydue to installationcifccts);however, the
measuredbeamwidthsand peak sidelobclevelsagree
wellwiththeory.Figures17 and 18 show a seriesof
SADA noise images and beamwidth line plots
correspondingtotheblendedtheoreticalonesshown in
Figures 13 and 14, respectively.The shading
algorithmisseentobevalidated.
In-Situ Point Source: In addition to the static
calibrations using an isolated point source, tests areconductedusingthepointsourcemountedintheQFF
atthemidpointofthetrailingedgeofthemainclementairfoil.Thesemeasurementsinclude:
• Background acquisition runs for no tunnel airflow.The corresponding spectra is subtracted from theother spectra to remove the noise floor, asdescribed previonsly.
• Acquisition runs with no flow and point sourceturned on to verify processing acau_cy and theeffect of the test apparatus on the acoustic field.
• Acquisition runs with flow and point sourceoperating to evaluate the shear layer correctionalgorithms.
Figure 19 shows a series of noise image maps takenwith the SADA on the pressure side of the model foran elevationangleof 107 degreesand an azimuth
angle of zero degrees. At this location the face of the
array is parallel to the chord of the main elementairfoil. Figure 19(a) shows a photograph of the pointsource mounted in the QFF pointing toward thepressure side of the model. Figure 19Co) shows a30-kHz noise image map of the point source under noflow conditions. Figure 19(c) shows a 30-kHz noiseimage map for the point source operating in aMach 0.17 flow with no shear layer correction applied,while Figure 19(d) shows a similar map withcorrections. Notice that the apparent location of thesource moves approximately 3 inches downstream ofits actual position without shear layer correctionsapplied. The shear layer algorithm returns the sourceto its proper position, as verified by the no flow case.Other SADA elevation angles, producing larger
9
AmericanInstitute of Aeronauticsand Astronautics

position corrections, also find success using thesealgorithms.
Test Application
LADA Measurements: Acoustic noise image mapsare obtained by steering the LADA over a planeparallel to the main element chord on the modelpressure side. Because of limitations in the dataacquisition process in the early test stages of theprogram (of which this particular LADA data wasobtained), background noise spectra have not beensubtracted. However, the effect of background noisewas determined to be negligible for these results.Figure 20 shows typical acoustic image maps taken atfrequencies of 5, 8, 12.5, and 20 kHz. The flow isfrom bottom to top and an outline of the wing and flapprovide a reference for the noise sources that arepredominant. Note that the location and strength ofthe sources are dependent on frequency, with the leveldiminishing with frequency.
The benefits of using a larger aperture withcorresponding narrow beamwidth can be seen inFigure 21. This figure shows the position of the locallydominant noise source location, defined by the centroidof the source on the image maps in Figure 20. Thisfigure shows that along the flap-side edge, a trendexists for the lower frequency sound sources to belocated near the flap trailing edge with the sourcelocation moving to the flap mid chord and flap mainelement juncture at higher frequencies. Suchinformation is only obtainable using an array with asufficiently large aperture size and correspondinglynarrow beamwidth.
SADA Measurements: Figure 22 shows the SADA
elevation angles which were employed for directivitystudies in the QFF. Figure 23 shows flap edge spectrataken at an elevation angle of 107 degrees. The SADAazimuth angle is at zero degrees, corresponding to theplane of the flap side edge surface. The model flapangle condition is 29 degrees. The array is focused onthe flap region, which for this flap angle is by far themost intense noise producing region. Shown on theplot, along with the SADA beamformed-outputspectrum, is the spectra obtained from a singlemicrophone in the array. The difference in levelsbetween these represents the removal of unwantednoise emanating from regions other than those presentat the steering location. As previously indicated, theSADA spectrum represents that noise emitted from aregion of constant size for frequencies between 10 and40 H-Iz. At lower frequencies, the noise emission
region measured is larger; for higher frequencies, theregion is smaller.
Figure 24 shows the elevation angle sourcedirectivity in terms of a series of noise spectra obtainedfor the SADA at a number of elevation angles aboutthe model. The model flap angle is now 39 degrees.With the exception of the most downstream position,the spectra are within 2 to 3 dB of one another forfrequencies from 10-30 kHz. Larger deviations in
directivity occur over the lower and upper frequenciesdue to differences in source characteristics, asdescribed in Reference 17.
It is noted that the LADA's 39 degrees of solidcollection angle sets well within the SADA elevationangle range shown here. The degree of directivityuniformity found over the 10-30 kI-Iz range offrequencies suggests that measurements with theLADA should have quantitative accuracy, in additionto it having source positioning accuracy. This is true,as long as the azimuthal directivity (not determined forthis paper) is likewise uniform and that the spatialsource-noise coherence is high. As previouslyindicated, any lack of spatial uniformity over the arraymicrophones would effectively shade the microphone'sresponse in the beamforming and, thus, would changethe array response characteristics.
Summary,
This paper presents an overview of the design andconstruction of two complementary microphonedirectional arrays used for aeroacoustic testing. ALarge Aperture Directional Array (LADA) has beenconstructed to obtain high resolution noise localizationmaps. A Small Aperture Directional Array (SADA)has also been made to be moved about the model tO
provide localized spectra and directivity from selectednoise source regions. Calibration tests havedemonstrated their accuracy and fimctionality. Botharrays have been used to successfully measure the far
field acoustics on a main element / half-span flapmodel. The LADA was able to detect small changes inlocation of dominant noise sources emanating from theflap edge region, while the SADA was able to obtainspectra and directivity measurements from this region.
Acknowledgments
The authors wish to acknowledge Dave Devilbiss ofLockheed-Martin and Stuart Pope of ComputerSciences Corporation for data processing and softwaredevelopment support. The authors also gratefullyacknowledge Phil Grauberger and Ron Verbapen ofWyle Laboratories for data acquisition system support.
10
American Institute of Aeronautics and Astronautics

References
Kendall, J.M., Jr., "Airframe Noise Measurements
by Acoustic Imaging", A/AA Paper 77-55, AIAA15 _ Aerospace Sciences Meeting, Los Angeles,
CA, Jannary, 1977.
. Grosche, F.R., Stiewitt, H., and Binder, B.,"Acoustic Wind-Tunnel Measurements with a
Highly Directional Microphone", A/AA Journal,
Vohune 15, Number 11, pp. 1590-1596, 1977.
. Sehlinker, R.H., "Airfoil Trailing Edge Noise
Measurements With a Directional Microphone",AIAA Paper 77-1269, 4_ AIAA Aeroacoustics
Conference, Atlanta, GA, October, 1977.
. Grosche, F.R., Schneider, G., and Stiewitt, H.,
"Wind Tunnel Experiments on Airframe Noise
Sources of Transport Aircraft", A/AA Paper 97-1642, 3_ AIAA/CEAS Aeroacoustics Conference,
Atlanta, GA, May, 1997.
5. Brooks, T.F., Marcolini, M.A., Pope, D.S.,
"Airfoil Trailing-Edge Flow Measurements",
AZ4A Journal, Volume 24, Number 8, pp. 1245-
1251, 1986.
. Brooks, T.F., Pope, D.S., Maxcolini, M.A.,
"Airfoil Self-Noise and Prediction", NASA
Reference Publication 1218, July, 1989.
7. Elliot, R.S., "The Theory of Antenna Arrays",
Microwave Scanning Antennas, R.C. Hansen, ed.,
Academic Press, 1966.
. Bttrdic, W.S., "Underwater Acoustic System
Analysis", Prentice-Hall, lnc., Englewood Cliffs,NJ, 1984.
. Sodernum, P.T., and Noble, S.C., "A Four-
Element End-Fire Microphone Array for AcousticMeasurements in Wind Tunnels", NASA Technical
Memorandum X-62, 331, January, 1974.
10. Soderman, P.T., and Noble, S.C., "Directional
Microphone Array for Acoustic Studies of Wind
Tunnel Models", Journal of Aircraft, pp. 169-173,I975.
11. Billingsley, J., and Kinns, R., "The Acoustic
Telescope", Journal of Sound and Vibration,
Volume 48, Number 4, pp. 485-510, 1976.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
Brooks, T.F., Marcolini, M.A., and Pope, D.S., "A
Directional Array Approach for the Measurementof Rotor Noise Source Distributions with
Controlled Spatial Resolution", Journal of Sound
and Vibration, Volume 112, Number 1, pp. 192-197, 1987.
Marcolini, M.A., and Brooks, T.F., "Rotor Noise
Measurement Using a Directional Microphone
Array", Journal of the American Helicopter
Society, pp. 11-22, 1992.
Underbrink, J.R., "Practical Considerations in
Focused Array Design for Passive Broadband
Source Mapping Applications", Master's Thesis,
The Pennsylvania State University, May, 1995.
Mosher, M., "Phased Arrays for Aeroaconstic
Testing: Theoretical Development", A/AA Paper96-1713, 2"_ AIAA/CE,4S A eroacoustics
Conference, State College, PA, May, 1996.
Watts, M.E., Mosher, M., and Barnes, M.J., "The
Microphone Array Phased Processing System(MAPPS)", AIAA Paper 96-1714, 2_ AIAA/CEAS
Aeroacoustics Conference, State College, PA,
May, 1996.
Meadows, K.1L, Brooks, T.F., Humphreys, W.M.,
Hunter, W.W., and G-erhold, C.H., "Aeroacoustic
Measurements of a Wing-Flap Configuration",AIAA Paper 97-1595, 3"d AIAA/CE.AS
Aeroacoustics Conference, Atlanta, GA, May,1997.
Johnson, D.H., and Dudgeon, D.E., Array Signal
Processing, Prentice Hall, 1993.
Hubbard, H.H., and Manning, J.C., Aeroacoustic
Research Facilities at NASA Langley Research
Center, NASA Technical Memorandum 84585,1983.
Pew, R., Davis, G., Emmerson, S., and Davies, H.,"NetCDF User's Guide - An Interface for Data
Access", University Corporation for Atmospheric
Research - Unidata Program Center, Boulder,CO, 1996.
Pao, J.Z., and Humes, D.C., "NASA LangleyResearch Center's Distributed Mass Storage
System", 14 th 1EEE Symposium on Mass Storage
Systems, 1995.
11
American Institute of Aeronautics and Astronautics
22. SchLinker, R.H., and Amiet, ILK., "Shear Layer
Refraction and Scattering of Sound", AL4A Paper
80-973, 1980.
23. Amiet, R.K., "Refraction of Sound by a Shear
Layer", Journal of Sound and Vibration, Volume
58, Humber 3, pp. 467-482, 1978.
Mic #
Table I - LADA Micn)hone Coordinates#_Viewed from Front of Arra,Z location Mic X location Y location
0.00
X location Y location
On) On)0.03 -I._
0.97 -0.320.61 0.80-0.57 0.81-0.93 -0.30
-5.13 0.88-2.42 -4.633.67 -3.754.71 2.30
-0.73 5.17-2.34 -5.63
7.50 -4.916.99 5.59
-3.16 8.35-8.92 -0.424.80 -10.4911.45 1.302.31 11,26
lg -9.99On)5.68
Z k)cafio(1
On)0.00
2 0.00 20 -8.47 -7.78 0.003 0.00 21 10.57 -8.60 0.004 0.00 22 11.44 7.37 0.005 0.00 23 .3.47 13.14 0.006 0.00 24 -13.56 0.75 0.007 0.00 25 -4.89 -12.69 0.008 0.00 26 14.56 -5.15 0.00
9 0.00 27 9.39 12.22 0.0010 0.00 28 -8.73 12.68 0.0011 0.00 29 -14.74 -4.38 0.00
12 0.00 30 -0.39 -15.42 0.0013 0.00 31 17.01 -1.12 0.0014 0.00 32 6.32 15.81 0.0015 0.00 33 -13.08 10.89 0.0016 0.00 34 -14.39 -9.09 0.0017 0.00 35 4.21 -16.52 0.00
0.0018
Mic#
1011
121314151617
Table 2 - SADA Micro
X location Y location
(in) (in)0.00 0.000.00 -0.450.34 -0.340.45 0.000.34 0.340.00 0.45-0.34 0.34-0.45 0.00-0.34 -0.34
0.00 -0.900.69 -0.690.93 0.000.69 0.690,00 0.90
-0.69 0.69-0.90 0.00-0.69 -0.69
Jhone Coordinates (Viewed from Front of Arra._Z location Mic # X location Y location
(in)0.000.000.000.000.000.000.000.000.00
0.000.000.000.000.000.000.000.00
18192021222324
25262728293O313233
_)0.001.371.801.370.00-1.37
-1.80-1.370.002.753.502.750.00-2.75.3.602.75
(in)-1.80-1.370.001.371.801.37
0.00-1.37.3.60-2_750.002.753.602.750.00-2.75
Z location
(in)0.000.000.000.000.000.00
0.000.000.000.000.000.000.000.000.000.00
Cluster NumberTable 3 - SADA Cluster Groupings
Microphone Grouping Dia_lonalCluster Aperture(in)
1 - 17 1.94
1, 10-25 3.881, 18-33 7.76
12
American Institute of Aeronautics and Astronautics

Array
"l
M1 _ Source
Spherical Wave
Propagation
M3
Figure 1. Basic Principle of DirectionalArray Operation.
Figure 2. Large Aperture Directional ArrayMounted in QFF for Testing.
J
9O
2O120 60
15 •
150 • • •10 •
5- • " •
0 180 • _'_
.5 o_ •
• • •10 210 •
15 • •
24o 3oo20 J
27O
3O
• 0
Figure 3. Large Aperture Directional ArrayMicrophone Layout.
13American Institute of Aeronautics and Astronautics

m'10
.GnU)
O
o
I
-23
4
5
-6-7
-8-9
-Io
-1112
-13
-2 'j)
_'oW)
i i
o
-2
-4-
-6
-8
-lO=
-12-
-14 L J
-1 0 1
0.5
"to(ft)
0.4
0.3
0.2
0.1
0x o
-0.1
-0.2
-0.3
I <-13 dB
L
<-13 dB
-0.4
.O._r5'13".... ' .... ' .... I I , , ,-0.25 0 0.25Yo (ft)
0.5
6 kHz
m-o
.J
Or)
.4 _
-lo!
"12 i
-14
0.5 Fi--
0.4i-
0.3 _"
0.2 _.E
0,1-
=--- o_-x _
-0.1
-0.2
-0.3
-0,4
-0._50.5' '
o/ .,dB
0-t
2-3
4
-5
6
-7
-8-9I0
-lt
-12-13
ii
:!
, _ :, : :1̧ ;
i,'¸ 'IL,,, _f ,: : : :,, ,
J2 ' I- -1 0 1 2
Yo(ft)
<-13 dB
Q<-13 dB
-0.25 0 0.25Yo (ft)
0.5
10 kHz
Figure 4. LADA Theoretical Array Responses
for 6, 10, 20, and 30 kHz.
14American Institute of Aeronautics and Astronautics

@
_,'_,tit:!
o, _,<JB
C
I-2
4.5
-8
-7
.g
.I0
.It
.12
.13
-2-
-4-nn"'0
,,.J" -6Q,.03,
-8.
-10 ¸
-12-
, • : _ : : ' , ," : !i_k_̧ ' _ , ,_ : •_
i I _ ir i_i _i _
-14
0.5
0.4
0.3
0.2
0.1
0><o
-0.1
-0.2
-0.3
-0.4
-2 -1 0
Yo(ft)
-3 dB
Q-6 dB
<-9 dB
.0..50'5 .... ' ,('_,, J , , f-_",, I ,, . ,-0.25 0 0.25 0.5
Yo (ft)
20 kHz
-2
-4-
"0
-613.or)
-80
-10-
-12
o
1
2-3
-4
-5
7
9
to
11
1213
,: :r: ¸ i ¸ '_i :: _, i /_: ': , :" 'i;'
I'
t
-14 -'2 _1 ............- 0 1 2
Yo(ft)
,5 -
©o.,_
o.r: @(3
0.2 Q
o.1
><o 0-o -_
-0.1Q
-0.2 _)
.0.31 o
-0.4
' 'o"25' ' ' '" • 0
Yo (ft)
o o
<-9 dB -3 dB
-6dB
<-9 dB
©o 0
®
(_) <b
o
0.25 0.5
30 kHz
Figure 4 (continued). LADA Theoretical Array Responsesfor 6, 10, 20, and 30 kHz.
15
American Institute of Aeronautics and Astronautics

1.5- !
i.",n !,
o.5!0.0-
4.
5 10 15 20
Frequency (kHz)
• -0.5 dB level
• -1.0 dB lever
_. -3.0 dB level
* -6.0 dB level
25 3O
Figure 5. LADA Theoretical Beamwidthas Function of Frequency.
in-
9O
120 " *4
3"l
150
2
1 .-
1 •
2 ?
210 _
3 '-
4 240 -
270
6O
• • 0
3O0
330
Figure 6. Small Aperture Directional ArrayMicrophone Layout.
Figure 7. Small Aperture Directional ArrayMounted in QFF for Testing.
16American Institute of Aeronautics and Astronautics

0 _ 5 ¸
L.(ft)
'L, _8
i (b
i-k
i-
I-6
1.7
I IC
I1!
I IZ
113
I 14
133
JnU)<o
0
-2-
-4
--6
-8
-10
-12
-14
-16-J2 0
Yo(_)
2
10 kHz
L. dB
C
-I
Z
7
-8
-9
-10
-11
-12
-13
-14
-15
en"o
J
ffl<o
0
-2!
-4 i
-61
r
-8!
[-10 L
-121
-14_
-16:-2 -1 0
¥o(ft)20 kHz
-I0
I'13
14
-15
'1o
..j-a.o')<o
o
-2
-4
-6-
-6 =
-10
-12-
-14
-16 ......... C .,
-2 -1 0 1
Yo (ft)
Figure 8. SADA Theoretical Array Responsesfor 10, 20, 30, and 40 kHz.
17American Institute of Aeronautics and Astronautics
30 kHz

-?¥ Ilt_
'L, dE_
0-I
-34
-5
-78
9
-1(]-1i
-12
-yJ
-1415
rn"0
J12.
<0
0-
-2,
-4_
-6
-6 _
-10-
-12
-14-
-16 -_1 o
Yo(ft)
Figure 8 (continued). SADA Theoretical Array Responsesfor 10, 20, 30, and 40 kHz
4 ...................
3 ¸
¢-"U
Em(D
tx31
r F
• -0.5 dB level• -1.0 dB level
-3.0 dB level• -6.0 db kDvel
• t
i a m l
I
10 20 30 40 50
Frequency (kHz)
2
40 kHz
Figure 9. SADA Theoretical Beamwidth
as Function of Frequency.
lUm-Pro Wcwksmtlon
lUIIOf (Anail#mle)
II=7oe_"=' II Oiak Storagel
Figure 10. Data Acquisition / Analysis Block Diagram.
18
American Institute of Aeronautics and Astronautics
.-.. //F............./ ,,s.arr==_-..j_.,,<_-/O /z _erMi,,.int_os.,o°
_I I v
Tangent to Shear _/_.,© I \ JLayer at RayPath / | /-Source I _ _,niercei,t , i /_oi=e__ _ 0
J Nozzle
Figure 11. Geometry Showing Angles Utilizedin Shear Layer Correction. Dashed Line Denotes Ray Path.
Velocity Triangle is Shown.
Defined Grid
Figure 12. Array Steering.
Array
10, 20, 40 kHz
.21 _
<-21 dB
1
_oX
_1!-21
-22 ' 2
<-21 dB
- 1 yo0ft)( 1
12.5, 25 kHz
<-21 dB / \
_oO
21 d
_\, ,V. ,/_, ,_"22 -1 Yol_ft) 1 2
15, 30 kHz
<-21 dB
___ _)_____1
.1__ _ /_/ _
i _ 1 <-21 dB I
" -2 -1 yo_ft) 1 2
1
_o
-1
%
17.5, 35 kHz
<-21 dB
<-21 dB
, I .... I , , , , I , i
-1 0 1 2Yo (ft)
Figure 13. Frequency-Invariant SADATheoretical Array Responses.
19American Institute of Aeronautics and Astronautics

"U
E¢U(1)
m
4-
3-
4b
2-
i• -0,5 dB bevel I
• -l.0dB level i
*= -3.0 dB level V
' • -6.0 dB level
1 •
• i A
: | | | -" I0-
!
o lo 20 ao 40 5o
Frequency (kHz)
Figure 14. SADA Theoretical Beamwidths Using Shading.Compare with Figure 9.
Yo (tl)
6 kHz
c 'LdB
[0
I-2
I-3!-4
Fs1-6
-7
.9
lO.11
.12
-t3
-.gx _
"-2 -1 0
"_o [ft)
10 kHz
OASPL d8
.!
°
-lO
1'
- 1 0 1
Vo lft)
20 kHz
-._B
0-I
-2
-3
-4-5
-6
-7
-9
-10
-12
-13
2? -I 0 1
Yo (ft)
30 kHz
Figure 15. Noise Image Maps from LADAIsolated Point Source Calibration.
Compare with Figure 4.
20American Institute of Aeronautics and Astronautics

t--
E
m
2 5 • -1.0 dBlevel l• '_ _ -3.0 dBlevel ]
-6.0 dB level /
t2 0
1.5 ¸
1.0
0.5
0.0s:'i
o 5
Jill== = zl
10 15 20 25 30
Frequency(kHz)
Figure 16. Measured LADA Beamwidth fromIsolated Point Source Calibration.
Compare with Figure 5.
x
-1
-2.2
10, 20, 40 kHz
.__.21_ _.21 j \.21-7
<-21 dB
<-21 dB _
-1 yOft)°( 1 2
12.5, 25 kHz
.21_ / "_ 21_ /
1
go
-1
"_-2 -1 0 1 2Yo (ft)
_Cx
"_2
15, 30 kHz
- 1 yOft)°( 1 2
2Lj17.5, 35 kHz
1© ©
-1
_ <-21 dB
Figure 17. Noise Image Maps from SADAIsolated Point Source Calibration.
Compare with Figure 13.
21American Institute of Aeronautics and Astronautics

4_v
r-
E
o_
5
4-
3-
2 ¸
_, • • 4t
1 * _, ,_ _
= ., .,o !
• -0.5 dB level• -1.0 dB level
-3.0 dB level• -6.0 dB level
I -
"" t0 10 20 _0 40 50
Frequency (kHz)
Figure 18. Measured SADA Beamwidths from
Isolated Point Source Calibration.
Compare with Figure 14.
(a) M o = 0.0, Freq = 30 kHz
-2 -1 r_ 1
5_,_nw 8e 4ocalbon (IT)
(b)
sP_ ca
33
m ,,,
M o = 0.17, Freq = 30 kHz (c)
-1 "J
s_a_Nl_e Ioc4_IIo r_(f!)
SPLdB
39
3837
3635
34
Mo = 0.17, Freq = 30 kHz
2 - 1 El 1
(d)
sP_ dB
4Z
_T40
37
3__5
_4
_3
3_
Figure 19. Example of In-Situ Point Source Measurements
for Shear Layer Correction Verification.
(a) Photograph of Experiment
(b) Noise Image Map of Point Source With No Flow
(c) Noise Image Map of Point Source - No Shear Correction Applied(d) Noise Image Map of Point Source with Shear Correction
22
American Institute of Aeronautics and Astronautics

M = .17, (x = 16°, _ = 39 °
f = 5kHz
70 67 64
SPL (db)
f = 8kHz
S4 41 68
SPL (db)
_o (in) 0
0
Yo (in)
-6 0
Yo (in)
f = 12.5kHz58 55 $2
SPL (db)
f = 20kHz44 44 42
SPL (db)
(o (in) 0
0 6 -6
Yo (in)
Figure 20. Sound Source Localization Maps forLADA Airframe Noise Model Measurements.
Mo=0.17 , Angle-of-Attack=16 deg, Flap=39 deg
23American Institute of Aeronautics and Astronautics
0
Yo (in)
6

Xo(in)
2
M =.17, a= 16 °
6_z • 4 e3_ Flopo 6f = 39 =12 Id4z O7 kHz O21_z
ee_zoa_ z • 8f = 29 °
91_z o7kHz
O 8 _J_z
o9kHzO 10 id-lz
_3_'==_ 15, 16, 22 & 23 Id'tz _ Id"IZ
0 _ l, 12,14, 17, 21 & 24,26 Id_
813 _z
_ E_ementOve_p
-1 ...... , /_,-0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 18.0
Yo(In)
Figure 21. Locally Dominant Noise Source Centroid
Locations on Airframe Noise Model Flap.Origin Denotes Flap and Main Element Juncture.
Mo=0.17 , Angie-of-Attack=16 deg
e
-39.
- 56 •
-73 • F-90 =
-107 • //_-124,
skJeplatej nc
• 4_-- 56"
-73.90
,!;07
el 24
*141
90
80
7O
6O
"D
w 60-IIXM
40
30
FFigure 22. SADA Elevation Angles
for Directivity Measurements.
20
10o
Blunt Flap Edge Configuration, S, = 29 °
SADA Position = 107 °Tunnel Mach = 0.17
8ADA kDo = 36.38
"_,_. Microphone #2 Noise Spectra
SADA Noise Spectra
"_ ......._" 8ADA Background Noise Spectra
I _ I I J _ I t b I J , I r | I I I I I I r J I II
10 20 30 40 60
Frequency (kH z)
90
eoi
70
6o
"I=
v 50.JL
40
30
2O
100
Blunt Flap Edge Configuration, 6, = 39 °
TunneIMach = 0.17
SADA kD ° = 36.38
.... 66 °
....... 73 °90 °
.... 107 °
.......... 124 °141 °
10 20 30 40 50
Frequency (kH z)
Figure 23. Typical Noise Spectra fromSADA Using 87 Hz Bandwidth.
Mo--0.17, Angle-of-Attack=16 deg, Flap Angle=29 deg
Figure 24. Directivity of Spectra Using
87 Hz Bandwidth for Mo=0.17.Angie-of-Attack=16 deg, Flap Angie---39 deg
24American Institute of Aeronautics and Astronautics