Vorlesung Automotive Software Engineering Teil 7 Normen...
156
INFORMATIK ▪ CONSULTING ▪ SYSTEMS AG Vorlesung Automotive Software Engineering Teil 7 Normen und Standards (1) TU Dresden, Fakultät Informatik Sommersemester 2012 Prof. Dr. rer. nat. Bernhard Hohlfeld [email protected]
-
Upload
truonghuong -
Category
Documents
-
view
216 -
download
1
Transcript of Vorlesung Automotive Software Engineering Teil 7 Normen...
INFORMATIK ▪ CONSULTING ▪ SYSTEMS AG
Vorlesung Automotive Software EngineeringTeil 7 Normen und Standards (1)
TU Dresden, Fakultät Informatik
Sommersemester 2012
Prof. Dr. rer. nat. Bernhard Hohlfeld
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
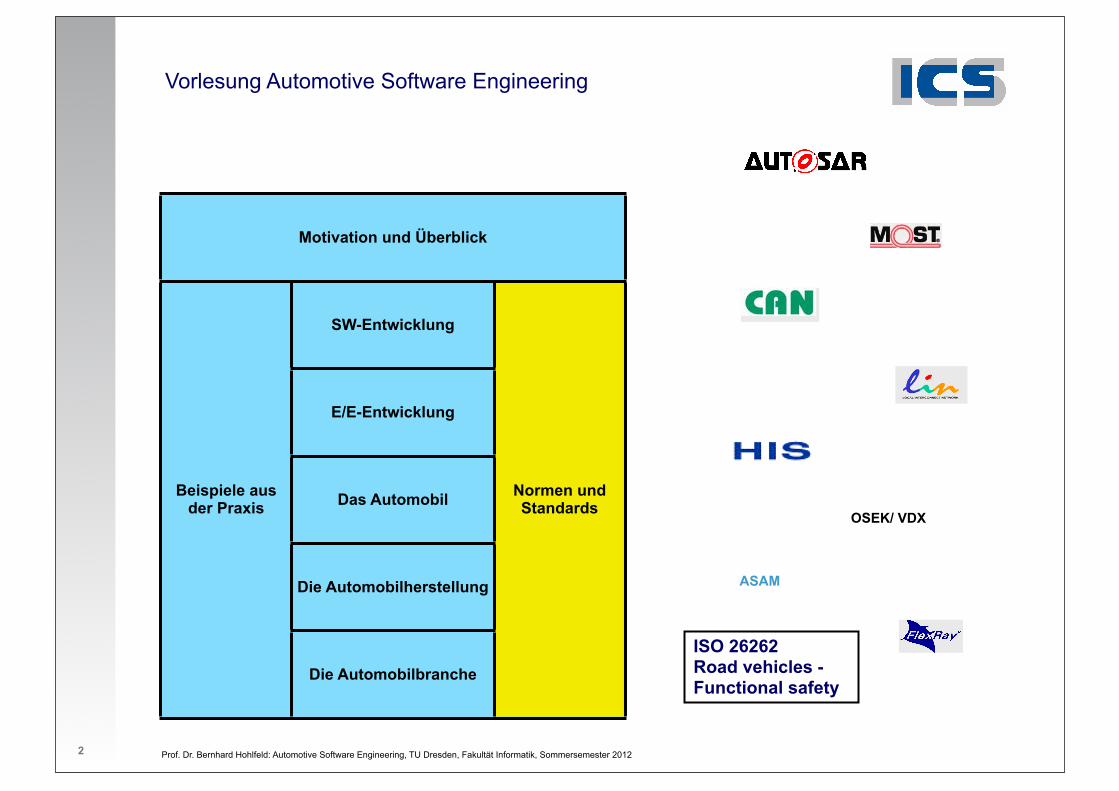
Vorlesung Automotive Software Engineering
2
Motivation und ÜberblickMotivation und ÜberblickMotivation und Überblick
Beispiele aus der Praxis
SW-Entwicklung
Normen und Standards
Beispiele aus der Praxis
E/E-Entwicklung
Normen und Standards
Beispiele aus der Praxis Das Automobil Normen und
StandardsBeispiele aus
der Praxis
Die Automobilherstellung
Normen und Standards
Beispiele aus der Praxis
Die Automobilbranche
Normen und Standards OSEK/ VDX
ASAM
ISO 26262 Road vehicles - Functional safety

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Lernziele Normen und Standards
Die Bedeutung von Normen und Standards für industrielle Entwicklung verstehen.
AUTOSAR Automotive Open System Architecture kennenlernen
Motivation
Technik
Beispiele
ISO 26262 Road Vehicles Functinal Safety kennenlernen
3

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. AUTOSAR
2. ARTOP
3. Vorgehensmodelle und funktionale Sicherheit
7. Normen und Standards
4

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. AUTOSAR
2. ARTOP
3. Vorgehensmodelle und funktionale Sicherheit
7. Normen und Standards
5

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Software im Fahrzeug - siehe Teil 2 Die Automobilbranche
6
Kupferband(Halbzeug)
Anwärmen
Fräsen
Querteilen
Längsteilen
kalt Vorwalzen
Zwischen und Fertigwalzen
Warmwalzen
Inspektion
Bleche
Bänder
Schema der Fertigung vonBändern und Blechen
14
Steckverbinder
Türe
Fahrzeug
SW-Entwicklungs-werkzeuge
Engineering Dienstleistungen
Halbleiter
PressenSteuergerät

Neue Beziehungen, Kompetenzen und Verantwortlichkeiten zwischen OEM und Zulieferer erforderlich
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Anforderungen
7

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
8

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR ist ganz einfach zu verstehen
9
DB
DB
DB
ATM

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
10

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR – Core Partners and Members (Phase II)
Ca. 170 Firmen (Stand Ende 2009)
11

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Core Partners in Phase III
Initial discussions 2002: BMW, Bosch, Continental, DaimlerChrysler and Volkswagen, partners were joined soon afterwards by Siemens VDO.
Additional Core Partners 2003: Ford, Peugeot Citroën, Toyota, 2004: GM
2008 Siemens VDO became part of Continental.
Phase III will start with 8 Core Partners
GM announced to continue in phase III as Premium Member
The 8 Core Partners agreed on the phase III 2010-2012 development contract
Phase III planning started and is well under way
12

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Membership Levels
Core Partners
Organizational control
Technical contributions
Administrative control
Definition of external Information(web-release, clearance, etc.)
Leadership of Working Groups
Involvement in Working Groups
Utilization of AUTOSAR standard
Premium Members
Leadership of Working Groups
Involvement in Working Groups
Technical contributions
Access to current information
Utilization of AUTOSAR standard
Associate Members
Access to finalized documents
Utilization of AUTOSAR standard
Development Members (for small companies with specific expertise)
Technical contributions
Access to current information
Utilization of AUTOSAR standard
Attendee (e.g. Universities)
Support Role
13

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Executive Board
Legal Team Follow-up Team
Core Partner
Core Partner, Premium and Development Member
Subcontractor
System Architecture
Application Interfaces
Software and Test Specification Validation
Quality Manager
Change Manager
Release Manager
Technical Office
… … … …
Administration
General Manager
AUTOSAR Phase III Organization
14
Steering Commitee
Technical Steering Team
Communica-tionTeam

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Initial WP Structure Phase III
Existence of Work Packages will
depend on sufficient
participation
Work Packages
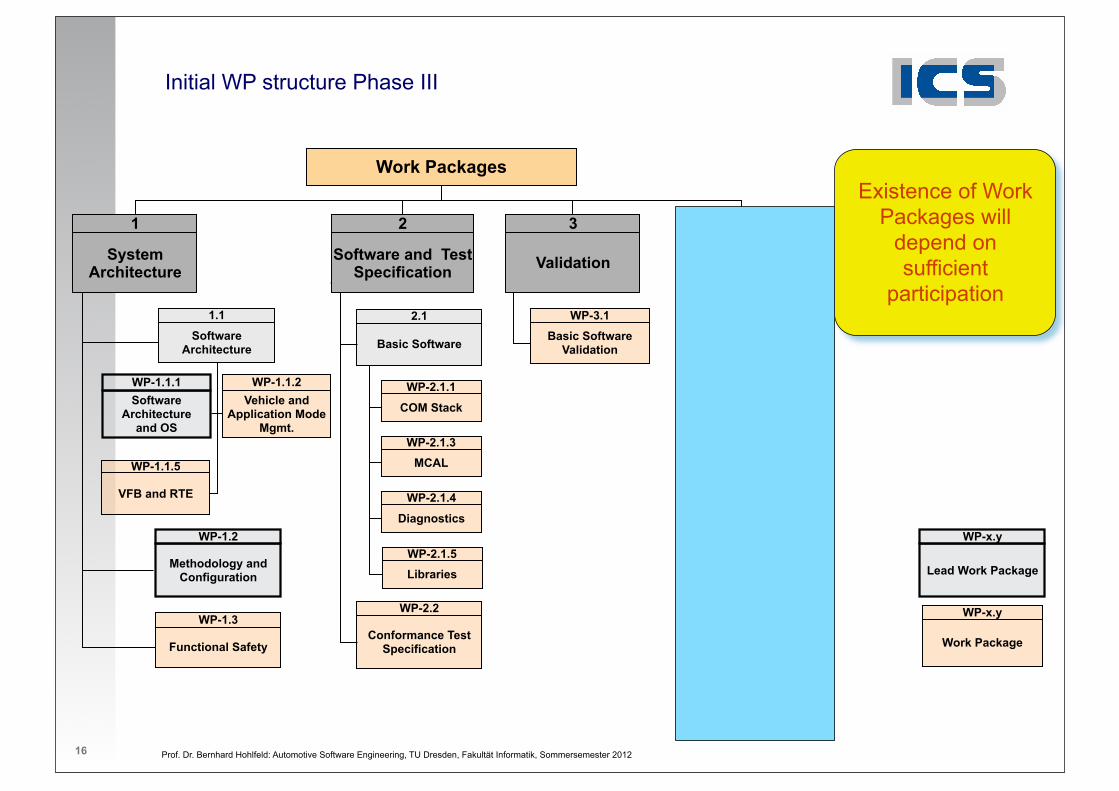
Functional Safety
WP-1.3
Body and Comfort
WP-10.1
Powertrain
WP-10.2
Chassis Control
WP-10.3
Occupants and Pedest. Safety
WP-10.4
Methodology and Configuration
WP-1.2
Conformance Test Specification
WP-2.2
Software Architecture
1.1
Software Architecture
and OS
WP-1.1.1Vehicle and
Application Mode Mgmt.
WP-1.1.2
COM Stack
WP-2.1.1
MCALWP-2.1.3
Diagnostics
WP-2.1.4
Basic Software
2.1Basic Software
Validation
WP-3.1
MM / T / HMI
WP-10.5
1
System Architecture
2
Software and Test Specification
3
Validation
Coordination of Appl. Interfaces
WP-10.0
10
Application Interfaces
LibrariesWP-2.1.5
VFB and RTE
WP-1.1.5
Lead Work Package
WP-x.y
Work Package
WP-x.y
15
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Initial WP structure Phase III
Existence of Work Packages will
depend on sufficient
participation
Work Packages
Functional Safety
WP-1.3
Body and Comfort
WP-10.1
Powertrain
WP-10.2
Chassis Control
WP-10.3
Occupants and Pedest. Safety
WP-10.4
Methodology and Configuration
WP-1.2
Conformance Test Specification
WP-2.2
Software Architecture
1.1
Software Architecture
and OS
WP-1.1.1Vehicle and
Application Mode Mgmt.
WP-1.1.2
COM Stack
WP-2.1.1
MCALWP-2.1.3
Diagnostics
WP-2.1.4
Basic Software
2.1Basic Software
Validation
WP-3.1
MM / T / HMI
WP-10.5
1
System Architecture
2
Software and Test Specification
3
Validation
Coordination of Appl. Interfaces
WP-10.0
10
Application Interfaces
LibrariesWP-2.1.5
VFB and RTE
WP-1.1.5
Lead Work Package
WP-x.y
Work Package
WP-x.y
16

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Elektronische Systeme im Fahrzeug(4.1 Domänen)
Anwendungsdomänen und elektronische Subsysteme(in diesem Abschnitt nach Schäuffele / Zurawka: Automotive Software Engineering)
Antriebsstrang (Powertrain)
Fahrwerk (Chassis)
Karosserie (Body)
Multi-Media (Telematics)
Auch andere Klassifizierungen gebräuchlich (Beispiel Mercedes-Benz Technik transparent)
Aktive Sicherheit
Passive Sicherheit
Karosserie
Fahrwerk
Innenraumtechnik
Elektronik
Motoren/Getriebe
17

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Initial WP structure Phase III
Existence of Work Packages will
depend on sufficient
participation
Work Packages
Functional Safety
WP-1.3
Body and Comfort
WP-10.1
Powertrain
WP-10.2
Chassis Control
WP-10.3
Occupants and Pedest. Safety
WP-10.4
Methodology and Configuration
WP-1.2
Conformance Test Specification
WP-2.2
Software Architecture
1.1
Software Architecture
and OS
WP-1.1.1Vehicle and
Application Mode Mgmt.
WP-1.1.2
COM Stack
WP-2.1.1
MCALWP-2.1.3
Diagnostics
WP-2.1.4
Basic Software
2.1Basic Software
Validation
WP-3.1
MM / T / HMI
WP-10.5
1
System Architecture
2
Software and Test Specification
3
Validation
Coordination of Appl. Interfaces
WP-10.0
10
Application Interfaces
LibrariesWP-2.1.5
VFB and RTE
WP-1.1.5
Lead Work Package
WP-x.y
Work Package
WP-x.y
18

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
What Daimler expects from AUTOSAR
Provisioning of an interoperable reliable software kit. Increase of quality and development speed through a comprehensive and standardized design and implementation approach.
Inter OEM exchange through interoperable software kits
Reduction of testing effort inthe automotive community
Internal and external libraries for off-the-shelf applications
Convenient integration into the development chain of Tier1s and OEMs
Faster SW integration processes
Standard application interfaces for‘SW as a product’
19
Source: AUTOSAR PM Conference 02-2008 / AUTOSAR - a key enabler for comprehensive E/E standardization / S. Wolfsried, Daimler AG
ApplicationInterfaces Methodology
Architecture/Basic Software
Workflow
.xml
Data Exchange

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Preconditions for the introduction of AUTOSAR
Introduction of a standard depends on its maturity and the benefits of its Geplante AUTOSAR-Anwendungen: Daimlers assessment is positive for AUTOSAR 3.0.
Remaining issues:
Conformance tests are essential for guaranteeing AUTOSAR’s integrity as a standard.
Furthermore, the standard appears ‚overloaded‘.
Maturity of a new standard has to be assured
The release of AUTOSAR 3.0 has been determined to be the sweet spot for introduction according to our maturity and benefit assessment
Maintenance shall be managed
The AUTOSAR community is seen capable to assure this
Conformance tests must be available to ensure the standard’s continuous integrity
Conformance tests not yet available
Today the standard appears overloaded: too many requirements with a “one-size-fits-all” approach
20
Source: AUTOSAR PM Conference 02-2008 / AUTOSAR - a key enabler for comprehensive E/E standardization / S. Wolfsried, Daimler AG

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 21
AUTOSAR TutorialOct. 23rd 20089
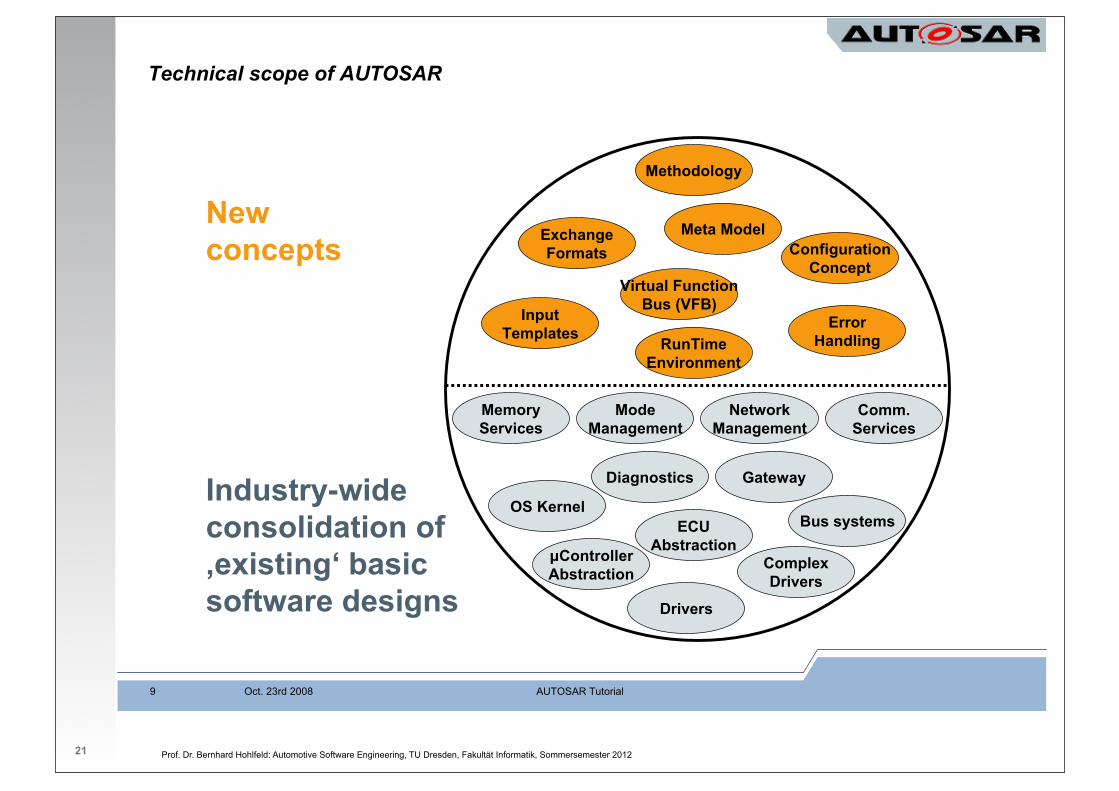
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 21
AUTOSAR TutorialOct. 23rd 20089
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 21
AUTOSAR TutorialOct. 23rd 20089
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 21
AUTOSAR TutorialOct. 23rd 20089
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 21
AUTOSAR TutorialOct. 23rd 20089
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 22
AUTOSAR TutorialOct. 23rd 20089
Technical scope of AUTOSAR
Industry-wide
consolidation of
‚existing‘ basic
software designs
New
concepts
OS Kernel
Memory
Services
µController
Abstraction
ECU
Abstraction
Diagnostics
Complex
Drivers
Bus systems
Mode
Management
Gateway
Network
Management
Comm.
Services
Drivers
RunTime
Environment
Configuration
Concept
Exchange
Formats
Input
Templates
Methodology
Virtual Function
Bus (VFB)
Meta Model
Error
Handling

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell 09.07.2012
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
23

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Architekturkonzept
24

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell Abstraktionsschichten der Steuergerätesoftware
25
Anwendungsschicht (Application Layer)
Laufzeitumgebung (Runtime Environment, RTE)
Basissoftware (BSW)
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell Anwendungsschicht (Application Layer)
26
Der Application Layer realisiert die Anwendungsfunktionalität des Steuergeräts mittels Anwendungs-Softwarekomponenten (SWC - Software Component).
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell Laufzeitumgebung (Runtime Environment, RTE)
27
Die Laufzeitumgebung (Runtime Environment, RTE) integriert den Application Layer mit der Basissoftware (BSW). Sie implementiert den Datenaustausch zwischen Anwendungs-Softwarekomponenten (SWC) und steuert die Interaktion zwischen SWCs und der BSW.
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Service Layer
28
Der Service Layer stellt verschiedene Arten von Hintergrunddiensten wie Netzwerkdienstze, Speicherverwaltung und Buskommunikationsdienste bereit. Das Betriebssystem ist ebenfalls in dieser Schicht enthalten.
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - ECU Abstraction Layer
29
Der ECU Abstraction Layer bietet einen einheitlichen Zugriff auf alle Funktionalitäten eines Steuergeräts wie Kommunikation, Speicher oder E/A.
Ziel: Unabhängigkeit der höheren Schichten von der Steuergeräte-Hardware
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Microcontroller Abstraction Layer
30
Der Microcontroller Abstraction Layer (MCAL) bietet beispielsweise Treiber für den Zugriff auf Kommunikation, Speicher und E/A des Mikrocontrollers.
Ziel: Unabhängigkeit der höheren Schichten von der Mikrocontroller-Hardware
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Complex Drivers
31
Die Complex Drivers enthalten die in AUTOSAR nicht standardisierten Treiber für die spezifischen Eigenschaften eines Mikrocontrollers oder Steuergeräts.
Bas
isso
ftwar
e (B
SW
)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Complex Drivers
32
Die Complex Drivers enthalten die in AUTOSAR nicht standardisierten Treiber für die spezifischen Eigenschaften eines Mikrocontrollers oder Steuergeräts.
Beispiele
Sensordatenauswertung
Direkter Zugriff auf Mikrocontroller
Einfachlösungen für geringe Stückzahlen
Zugriffszeiten (siehe unten)
Weiterverwendung (siehe unten)
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
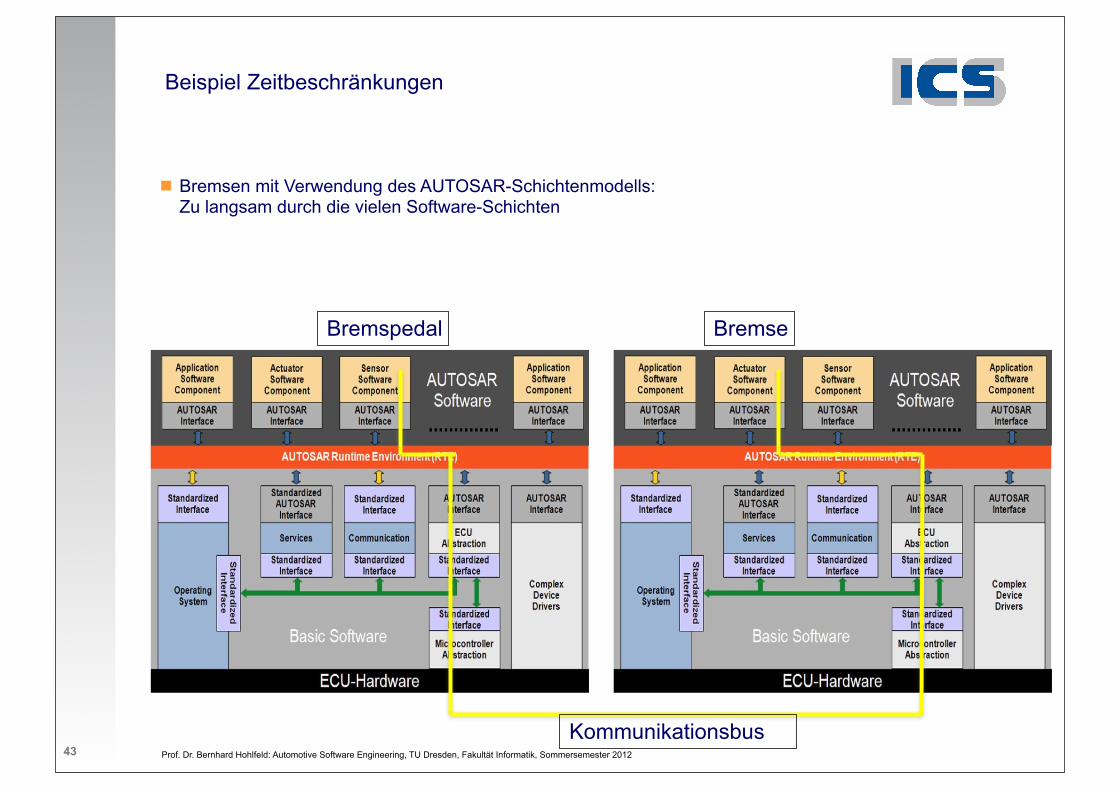
Beispiel Zeitbeschränkungen
Bremsen mit Verwendung des AUTOSAR-Schichtenmodells: Zu langsam durch die vielen Software-Schichten
Bremspedal Bremse
Kommunikationsbus43

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel Zeitbeschränkungen
Lösung: Direkter Zugriff auf die ECU-Hardware mit „Complex Drivers“
Bremspedal Bremse
Kommunikationsbus44

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Complex Drivers
35
Weiterverwendung
Bewährtes BSW-Modul

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Complex Drivers
36
Weiterverwendung
RTE-Schnittstelle
Bewährtes BSW-Modul

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR-Schichtenmodell BSW - Complex Drivers
37
Weiterverwendung
RTE-Schnittstelle
Anwendungssoftware
Bewährtes BSW-Modul
= Complex
Driver
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
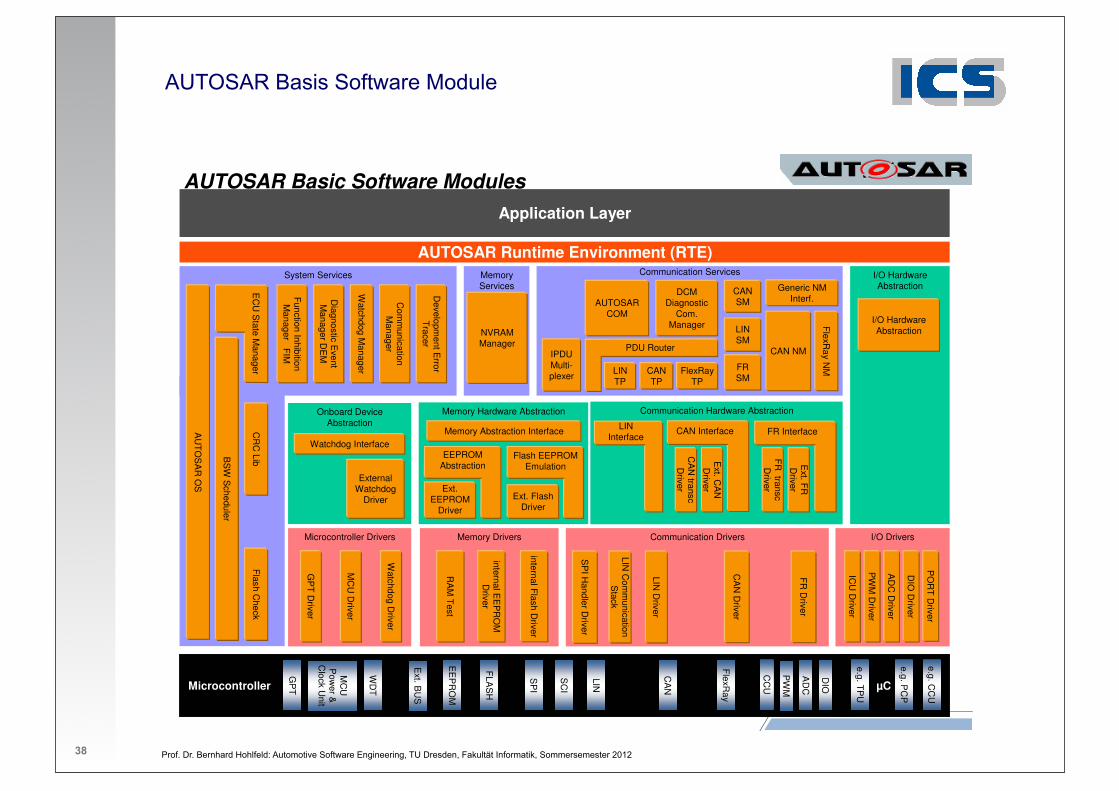
AUTOSAR Basis Software Module
38 20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
riverMemory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN InterfaceC
AN
transcD
river
Ext. F
R
Driver
FR Interface
FR
transcD
riverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
39

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR Software Komponenten (SWC)
Grundsätzlicher Design-Ansatz:
Trennung zwischen Steuergerät (Infrastruktur) und Anwendung (Funktionalität)
Eine Anwendung besteht aus miteinander verbundenen Software Komponenten
Die Software Komponenten sind atomar, d.h. sie können nicht über mehrere Steuergeräte verteilt werden.
Die Implementierung der Software Komponenten ist unabhängig vom Steuergerät.
Methodik
Beispiele
40

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwicklung
Die Anwendungssoftware wird unabhängig vom konkreten Steuergerät als ein System von untereinander verbundenen SWCs entworfen
41

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwicklung
Die Anwendungssoftware wird unabhängig vom konkreten Steuergerät als ein System von untereinander verbundenen SWCs entworfen
42

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungFormale Definition der Schnittstellen
Sender/Empfänger-Ports
Client/Server-Ports
43

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwicklung Sender/Empfänger-Ports
The sender-receiver pattern gives solution to the asynchronous distribution of information, where a sender distributes information to one or several receivers. The sender is not blocked (asynchronous communication) and neither expects nor gets a response from the receivers (data or control flow), i.e. the sender just provides the information and the receivers decides autonomously when and how to use this information.
The sender component does not know the identity or the number of receivers to support transferability and exchange of AUTOSAR Software Components.
44
Quelle: http://www.autosar.org
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungClient/Server-Ports
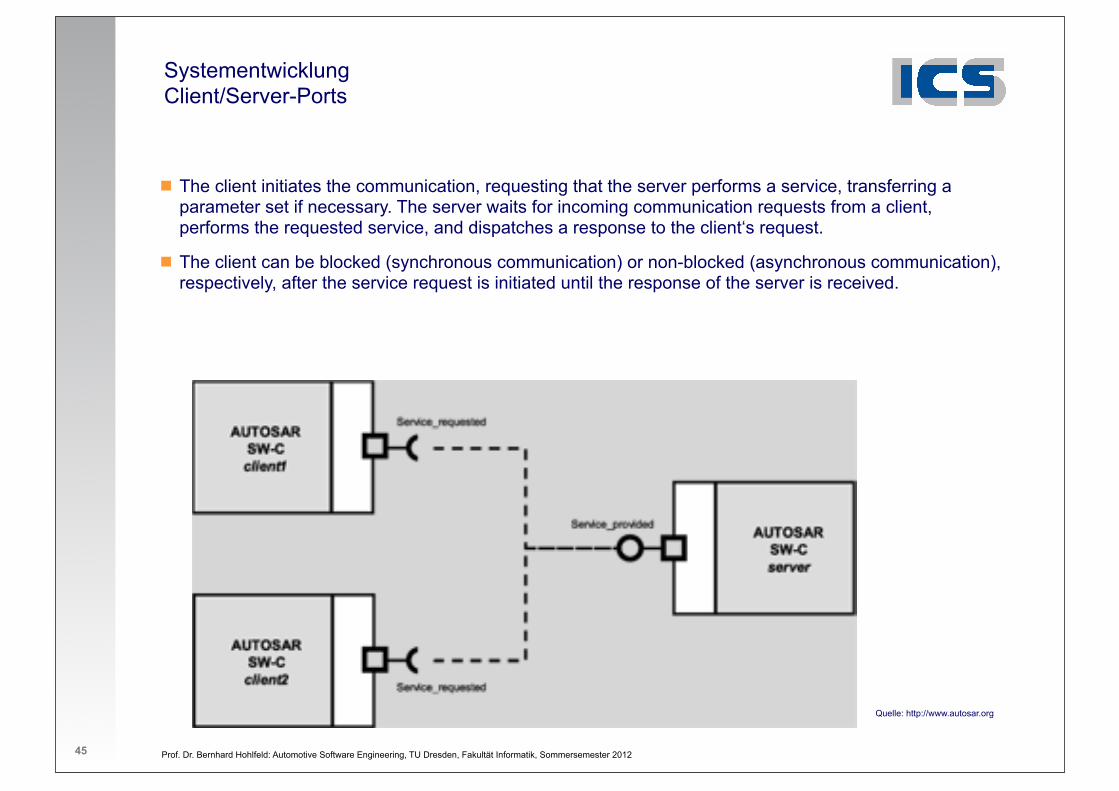
The client initiates the communication, requesting that the server performs a service, transferring a parameter set if necessary. The server waits for incoming communication requests from a client, performs the requested service, and dispatches a response to the client‘s request.
The client can be blocked (synchronous communication) or non-blocked (asynchronous communication), respectively, after the service request is initiated until the response of the server is received.
45
Quelle: http://www.autosar.org

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'
TSG Fahrer
TSG 2, ...
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'Welche Komponente kommuniziert noch mit dem Light Master?
TSG Fahrer
TSG 2, ...

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Beispiel
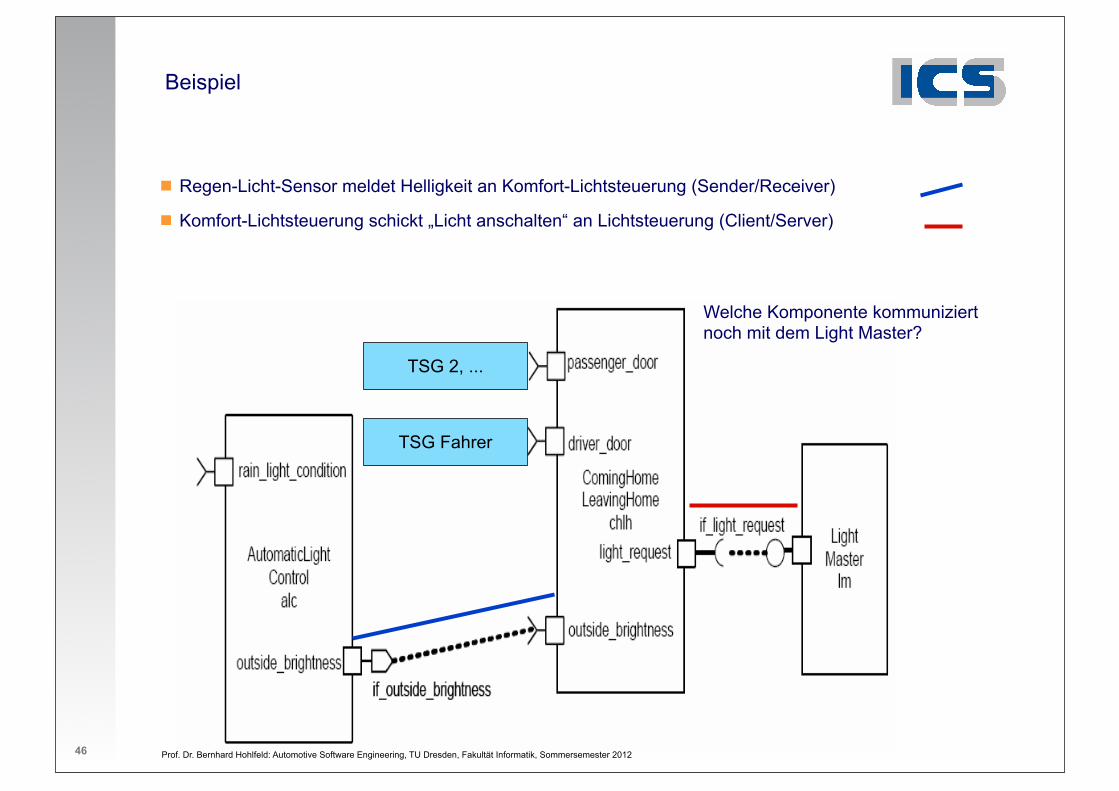
Regen-Licht-Sensor meldet Helligkeit an Komfort-Lichtsteuerung (Sender/Receiver)
Komfort-Lichtsteuerung schickt „Licht anschalten“ an Lichtsteuerung (Client/Server)
46
!"#$%!&'%()*+,-.'!-/01*./*2-. 34
!"#$%&'Welche Komponente kommuniziert noch mit dem Light Master?
Wie?
TSG Fahrer
TSG 2, ...
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Weitere Informationen zu Ports
Dr. Stefan Bunzel – AUTOSAR Spokesperson (Continental): Hardware-independent Software Development with AUTOSAR8. Workshop Automotive Software Engineering30 September, 2010, Leipzig
O. Kindel, M. Friedrich: Softwareentwicklung mit AUTOSAR. Grundlagen, Engineering, Management für die Praxis. dpunkt.verlag, 2009
Insgesamt 2 x 5 = 10 verschiedene Typen von Ports
PPort: Provides Interface, Data, Service
RPort: Requires Interface, Data, Service
Sender-Receiver Interface
Client-Server Interface
Calibration Interface
Data of AUTOSAR Service
AUTOSAR Service
47

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Weitere Informationen zu Ports
Dr. Stefan Bunzel – AUTOSAR Spokesperson (Continental): Hardware-independent Software Development with AUTOSAR8. Workshop Automotive Software Engineering30 September, 2010, Leipzig
O. Kindel, M. Friedrich: Softwareentwicklung mit AUTOSAR. Grundlagen, Engineering, Management für die Praxis. dpunkt.verlag, 2009
Insgesamt 2 x 5 = 10 verschiedene Typen von Ports
PPort: Provides Interface, Data, Service
RPort: Requires Interface, Data, Service
Sender-Receiver Interface
Client-Server Interface
Calibration Interface
Data of AUTOSAR Service
AUTOSAR Service
47
✔

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Weitere Informationen zu Ports
Dr. Stefan Bunzel – AUTOSAR Spokesperson (Continental): Hardware-independent Software Development with AUTOSAR8. Workshop Automotive Software Engineering30 September, 2010, Leipzig
O. Kindel, M. Friedrich: Softwareentwicklung mit AUTOSAR. Grundlagen, Engineering, Management für die Praxis. dpunkt.verlag, 2009
Insgesamt 2 x 5 = 10 verschiedene Typen von Ports
PPort: Provides Interface, Data, Service
RPort: Requires Interface, Data, Service
Sender-Receiver Interface
Client-Server Interface
Calibration Interface
Data of AUTOSAR Service
AUTOSAR Service
47
✔
✔

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
AUTOSAR Development MethodologyVirtual Functional Bus Concept

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
...
AU
TOSA
RSW
Cn
AU
TOSA
RSW
C3
AU
TOSA
RSW
C2
AU
TOSA
RSW
C1
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)
Handling of vehicle wide functions, independent from ECUs or network

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
...
AU
TOSA
RSW
Cn
AU
TOSA
RSW
C3
AU
TOSA
RSW
C2
AU
TOSA
RSW
C1
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)
Handling of vehicle wide functions, independent from ECUs or network
SWCs can communicate between each other and access functions from the standardized set of infrastructure functions

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
...
AU
TOSA
RSW
Cn
AU
TOSA
RSW
C3
AU
TOSA
RSW
C2
AU
TOSA
RSW
C1
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)
Handling of vehicle wide functions, independent from ECUs or network
SWCs can communicate between each other and access functions from the standardized set of infrastructure functions
Communication needs of a SWC are formally described in a standard template, i.e. the SWC Description
SWCDescription
SWCDescription
SWCDescription
SWCDescription

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
...
AU
TOSA
RSW
Cn
AU
TOSA
RSW
C3
AU
TOSA
RSW
C2
AU
TOSA
RSW
C1
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)
Handling of vehicle wide functions, independent from ECUs or network
SWCs can communicate between each other and access functions from the standardized set of infrastructure functions
Communication needs of a SWC are formally described in a standard template, i.e. the SWC Description
Any SWC interaction runs via „Ports“, which implement different communication paradigms, e.g. sender-receiver or client-server
SWCDescription
SWCDescription
SWCDescription
SWCDescription

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 48
Virtual Functional Bus
...
AU
TOSA
RSW
Cn
AU
TOSA
RSW
C3
AU
TOSA
RSW
C2
AU
TOSA
RSW
C1
AUTOSAR Development MethodologyVirtual Functional Bus Concept
Application software functionality implemented in „Software Components“ (SWC)
Handling of vehicle wide functions, independent from ECUs or network
SWCs can communicate between each other and access functions from the standardized set of infrastructure functions
Communication needs of a SWC are formally described in a standard template, i.e. the SWC Description
Any SWC interaction runs via „Ports“, which implement different communication paradigms, e.g. sender-receiver or client-server
The VFB enables a virtual integration of SWCs and allows to formally verify structural and dynamic
compatibility of SWCs
SWCDescription
SWCDescription
SWCDescription
SWCDescription

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 49
AU
TOSA
R S
WC
Virtual Functional Bus
...
PPort, provides a Sender-Receiver Interface
RPort, requires a Sender-Receiver Interface
PPort, provides a Client-Server Interface, i.e. implements service
RPort, requires a Client-Server Interface, i.e. client of a service
PPort, provides data to AUTOSAR Service
PPort, provides AUTOSAR Service (in BSW only)
AU
TOSA
RSW
Cn
SWCDescription
PPort, provides a Calibration Interface
RPort, requires a Calibration Interface
RPort, requires AUTOSAR Service as client
RPort, requires data from AUTOSAR Service
AU
TOSA
RSW
C3
SWCDescription
AU
TOSA
RSW
C2
SWCDescription
AU
TOSA
RSW
C1
SWCDescription
AUTOSAR Development MethodologyVirtual Functional Bus Concept – Ports and Interfaces

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungVirtual Function Bus (VFB)
Während der Systementwurfsphase werden die SWCs auf Basis des Virtual Function Bus (VFB) logisch integriert
50

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungSystem Description
Zuordnung der Komponenten zu den Steuergeräten
Beschreibung der Netzwerkkommunikation im Fahrzeug
51

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode (1)
Beschreibt Abläufe von der Systemkonfiguration zur Generierung von Code für Steuergeräte
52

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode (2)
Erstellung von SWC Description, System Description und System Communication-Matrix unter Berücksichtigung der System Constraints (Beispiel: Übernahme einer Kommunikationsmatrix aus dem Vorgängerfahrzeug)
53

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode (3)
Aus SWC Description, System Description und System Communication-Matrix wird die ECU Extract of System Description generiert
54

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode (4)
Aus ECU Extract of System Description und BSW Module Description (Herstellerabhängig) werden die ECU Configuration Description, die konkreten BSW-Module und die RTE (Herstellerunabhängig) generiert
55

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Integration ins Fahrzeug
Steuergeräte
Bussysteme
56

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
57

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Bussysteme im KFZ - ÜberblickQuelle: Vector Informatik GmbHDetails siehe 5.5.5 Protokolle und Bussysteme
58

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
59
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
60
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
LIN CAN Flexray

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
61
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
IP

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
TCIP/IP-Erweiterung in Release 4.0
62
AUTOSAR Release 4.0 TCP/IP Extension of the CommStack – Overview
Communication HW Abstraction
RTE
Communication Drivers
AUTOSAR COM
FlexRay Interface CAN Interface LIN Interface (incl. LIN TP)
N-PDU
Communication Manager
Signals
FlexRay Driver CAN Driver LIN Low Level Driver
FlexRay TP
I-PDU
DCMDiagnostic
Communication Manager
CAN TP
I-PDU
I-PDU
I-PDU
I-PDU
N-PDU
L-PDU L-PDU L-PDU
IPDU multi- plexer
I-PDU
NM Coordinator
GenericNM interface
FlexRayState
Manager
NM Module
CAN State Manager
LIN State Manager
NM ModuleNM
ModuleEth State Manager
UDP NM Module
Socket adaptor
Ethernet Interface
Ethernet Driver
Eth- Frame
COTS TCP/IP Stack
Streams
IP
TCPUDP
Segment
Messages
Packet
ARP ICMP
Socket Interface
Datagram
I-PDU
I-PDU
DHCP
DoIPPDU Router
I-PDU
May 13, 2010 AUTOSAR Technical Overview24

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
63

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwurf
64
Kommunikation über Virtual Function Bus (VFB)
AUTOSAR Interface
Standardized AUTOSAR Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwurf
65
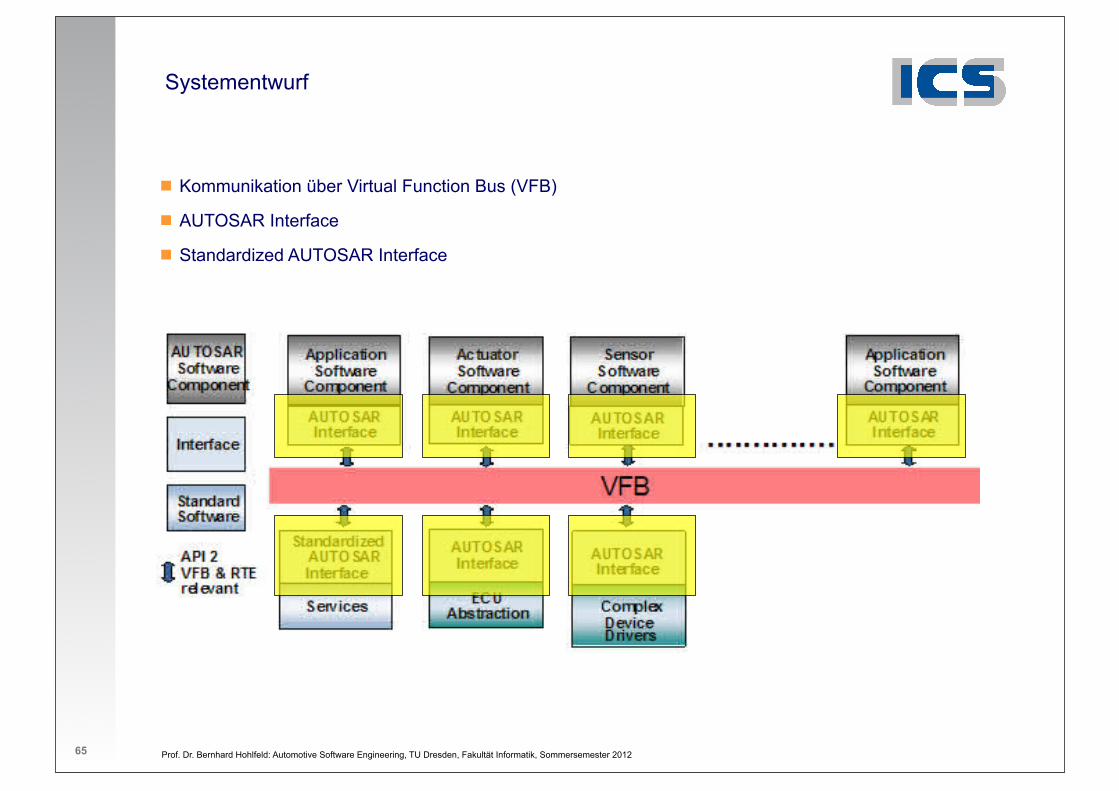
Kommunikation über Virtual Function Bus (VFB)
AUTOSAR Interface
Standardized AUTOSAR Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
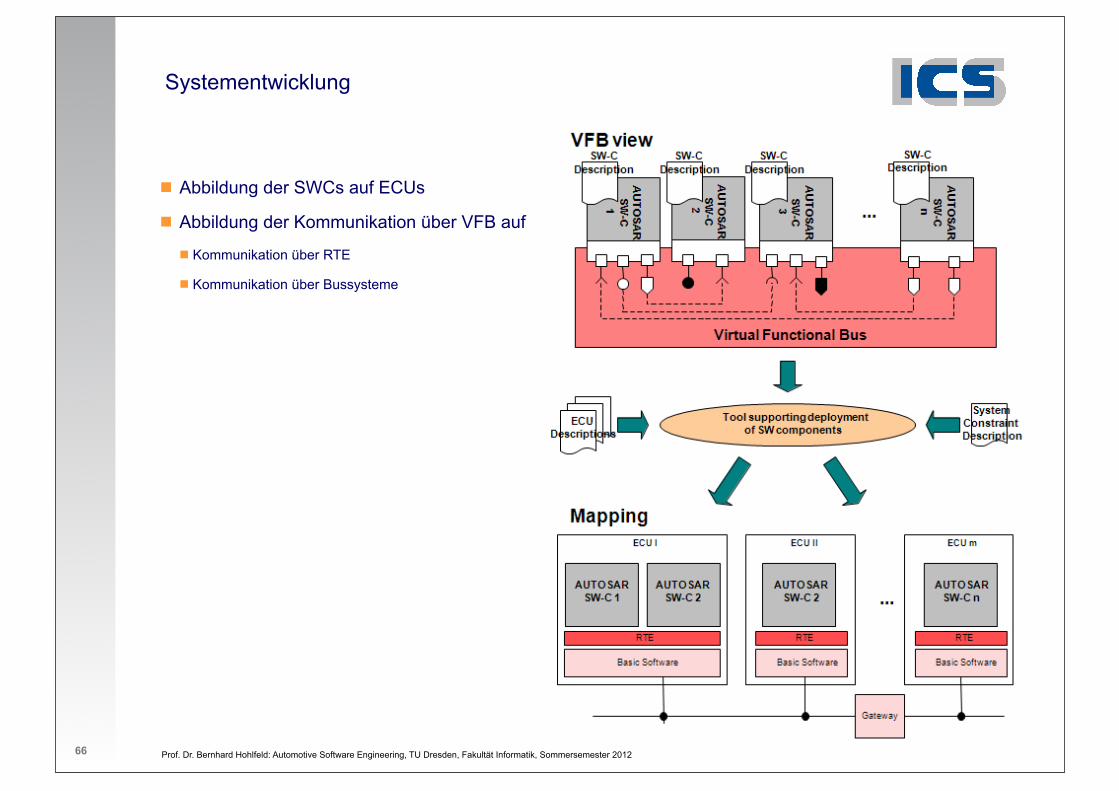
Systementwicklung
Abbildung der SWCs auf ECUs
Abbildung der Kommunikation über VFB auf
Kommunikation über RTE
Kommunikation über Bussysteme
66

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwicklung
Abbildung der SWCs auf ECUs
Abbildung der Kommunikation über VFB auf
Kommunikation über RTE
Kommunikation über Bussysteme
67

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Systementwicklung
Abbildung der SWCs auf ECUs
Abbildung der Kommunikation über VFB auf
Kommunikation über RTE
Kommunikation über Bussysteme
68

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Logische Kommunikation über RTE
69
AUTOSAR TutorialOct. 23rd 200830
! Ports implement the interface according
to the communication paradigm (here
client-server based).
! Ports are the interaction
points of a component.
! The communication is
channeled via the RTE.
! The communication layer
in the basic software is
encapsulated and not
visible at the application
layer.
Appli-
cation
SW-C
A
RTE
BSW
ECU I
Appli-
cation
SW-C
B
RTE
BSW
ECU II
Appli-
cation
SW-C
C
VFB
Sensor
Communication Bus
Communication Path
Hardware
AUTOSAR
Infrastructure
Ports
Application
Intra- and Inter-ECU Communication
Innerhalb eines Steuergerätes
Zwischen Steuergeräten über Kommunikationsbus

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Logische Kommunikation über RTE
70
AUTOSAR TutorialOct. 23rd 200830
! Ports implement the interface according
to the communication paradigm (here
client-server based).
! Ports are the interaction
points of a component.
! The communication is
channeled via the RTE.
! The communication layer
in the basic software is
encapsulated and not
visible at the application
layer.
Appli-
cation
SW-C
A
RTE
BSW
ECU I
Appli-
cation
SW-C
B
RTE
BSW
ECU II
Appli-
cation
SW-C
C
VFB
Sensor
Communication Bus
Communication Path
Hardware
AUTOSAR
Infrastructure
Ports
Application
Intra- and Inter-ECU Communication
Innerhalb eines Steuergerätes
Zwischen Steuergeräten über Kommunikationsbus

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Logische Kommunikation über RTE
71
AUTOSAR TutorialOct. 23rd 200830
! Ports implement the interface according
to the communication paradigm (here
client-server based).
! Ports are the interaction
points of a component.
! The communication is
channeled via the RTE.
! The communication layer
in the basic software is
encapsulated and not
visible at the application
layer.
Appli-
cation
SW-C
A
RTE
BSW
ECU I
Appli-
cation
SW-C
B
RTE
BSW
ECU II
Appli-
cation
SW-C
C
VFB
Sensor
Communication Bus
Communication Path
Hardware
AUTOSAR
Infrastructure
Ports
Application
Intra- and Inter-ECU Communication
Innerhalb eines Steuergerätes
Zwischen Steuergeräten über Kommunikationsbus

AUTOSAR Interface
Standardized AUTOSAR Interface
Standardized Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR SW-Architektur
72
AUTOSAR Interface
Standardized AUTOSAR Interface
Standardized Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR SW-Architektur
73

AUTOSAR Interface
Standardized AUTOSAR Interface
Standardized Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR SW-Architektur
74

AUTOSAR Interface
Standardized AUTOSAR Interface
Standardized Interface
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR SW-Architektur
75

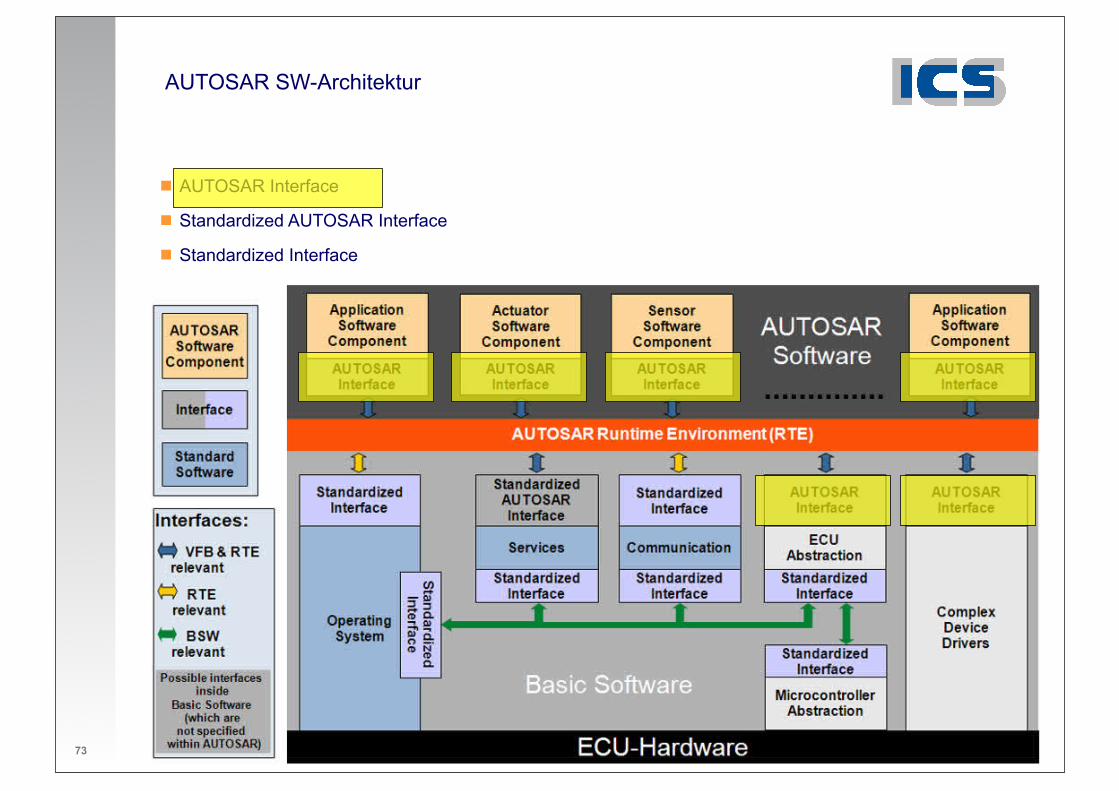
AUTOSAR Interface: Innerhalb Anwendungssoftware
Generische Schnittstelle, abgeleitet aus den Ports einer SWC.
Werden von RTE bereitgestellt
Schnittstellen zwischen SWCs (VFB)
Schnittstellen zwischen SWC und Steuergeräte-Firmware
Standardized AUTOSAR Interface: Zwischen Anwendungssoftware und Basissoftware
Vordefiniert durch AUTOSAR Standard
Zugriff von SWC auf BSW-Module des Service Layer
Standardized Interface: Innerhalb Basissoftware
Im AUTOSAR-Standard als C-API vordefiniert
Zwischen BSW-Modulen in einem Steuergerät
Zwischen RTE und Betriebssystem
Zwischen RTE und Kommunikations BSW
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR SW-Architektur
76
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
77

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 78
AUTOSAR TutorialOct. 23rd 200817
Use Cases of AUTOSAR Results
! Exchange of SW-Components
! Re-use of SW components for different platforms
… shown by uses cases
pedal management
front light management

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 79
AUTOSAR TutorialOct. 23rd 200818
! Implementation of functions independent on distribution on different ECU
as communication will be done via ECU-individual AUTOSAR-RTE exclusively
Use Case ‘Pedal Management’ view for one ECU
void distribute_v(void)
{
…
Rte_Write_p_v(rte_i, v)
…
}
void v_warn(void)
{
…
Rte_Read_p_v(rte_i, v)
…
}
distribute_v()

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 80
AUTOSAR TutorialOct. 23rd 200819
Use Case ‘Pedal Management’ view for two ECUs
! Reuse of Intellectual Property ! Increase in design flexibility! Simplification of the integration task! Reduction of SW development costs
Technical benefits
e.g. FlexRay, CAN, etc.
distribute_v()

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Verteilung auf 2 Steuergeräte
81
unverändert
neu
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
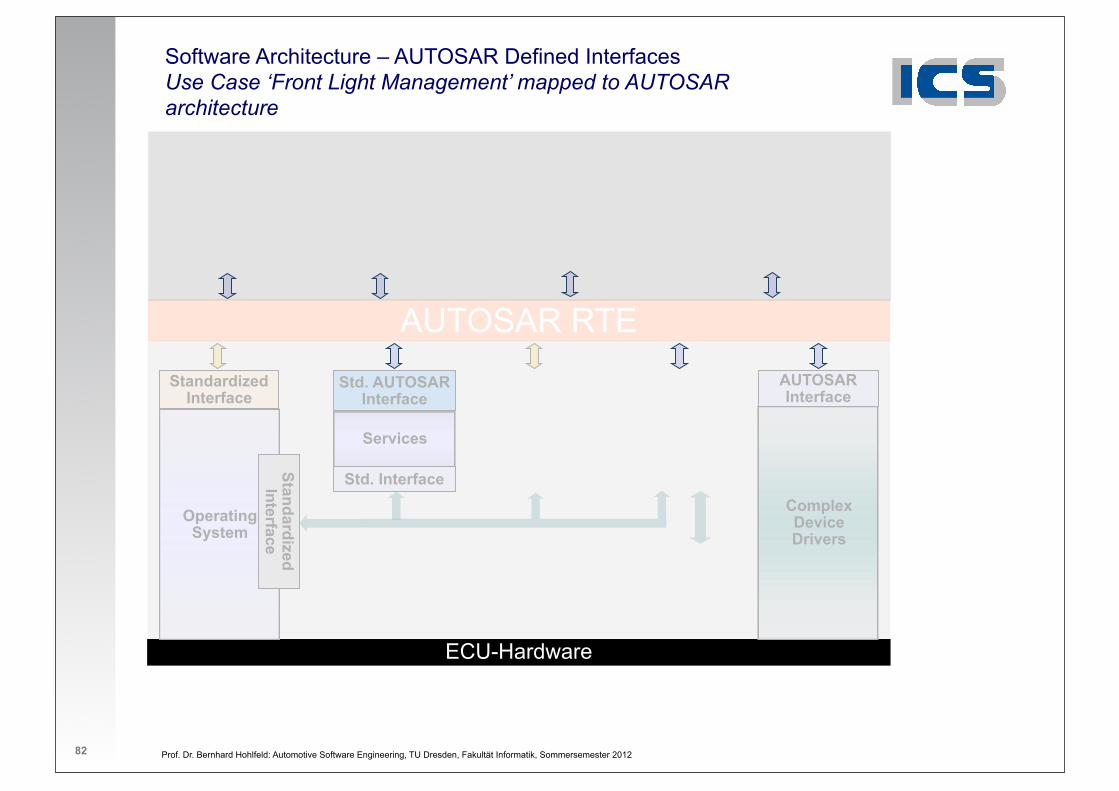
ECU-Hardware
AUTOSAR RTEStd. AUTOSAR
Interface
Services
Std. InterfaceComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
OperatingSystem
StandardizedInterface
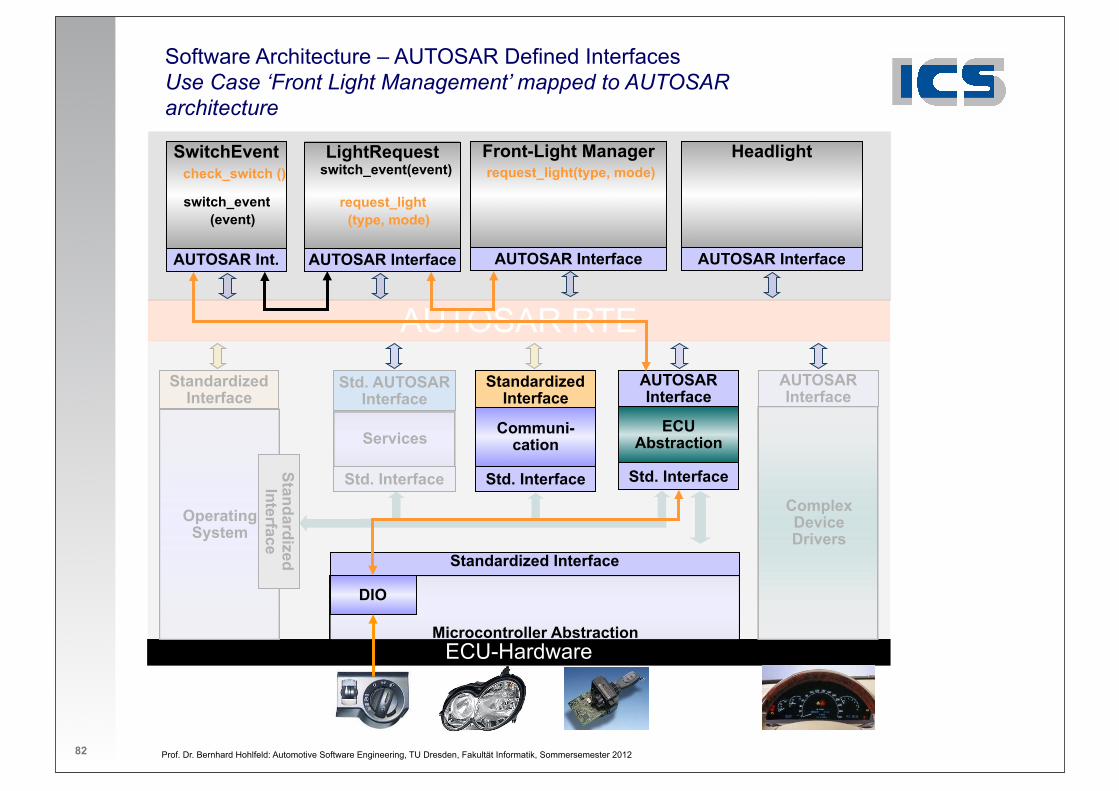
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
AUTOSAR Interface
Headlight
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
AUTOSAR Interface
Headlight
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
AUTOSAR Interface
Headlightswitch_event(event)
switch_event (event)
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
AUTOSAR Interface
Headlightswitch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architecture

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 82
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’ mapped to AUTOSAR architectureIntegrator Supplier B OEM Supplier A
Silic
on v
endo
r AIn
tegr
ator

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 83
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
set_dboard(type, mode)
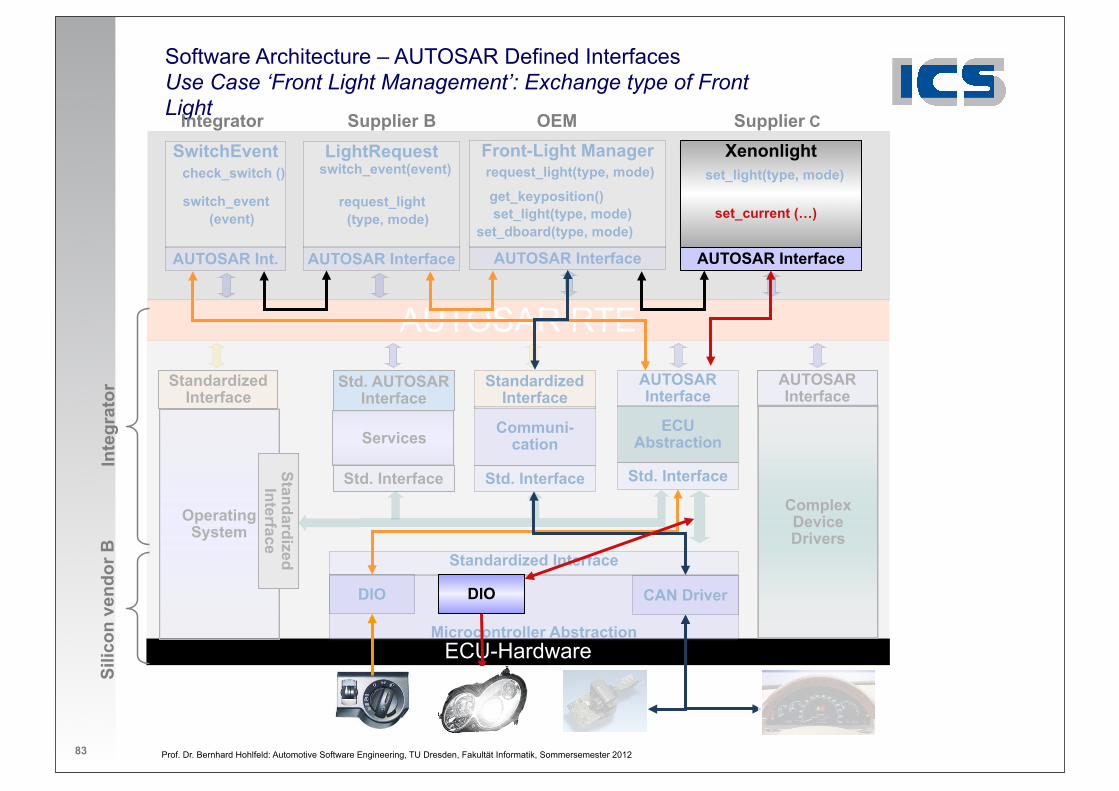
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’: Exchange type of Front LightIntegrator Supplier B OEM Supplier A
Silic
on v
endo
r AIn
tegr
ator

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 83
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’: Exchange type of Front LightIntegrator Supplier B OEM Supplier A
Silic
on v
endo
r AIn
tegr
ator

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 83
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’: Exchange type of Front Light
AUTOSAR Interface
Xenonlightset_light(type, mode)
set_current (…)
Integrator Supplier B OEMSi
licon
ven
dor A
Inte
grat
orSupplier C

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 83
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’: Exchange type of Front Light
DIO
AUTOSAR Interface
Xenonlightset_light(type, mode)
set_current (…)
Integrator Supplier B OEMIn
tegr
ator
Silic
on v
endo
r BSupplier C
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 83
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()set_current (…)
CAN Driver
switch_event(event)
switch_event (event)
request_light (type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
StandardizedInterface
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined InterfacesUse Case ‘Front Light Management’: Exchange type of Front Light
DIO
AUTOSAR Interface
Xenonlightset_light(type, mode)
set_current (…)
Integrator Supplier B OEMIn
tegr
ator
Silic
on v
endo
r BSupplier C

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Wechsel von Scheinwerfer auf Xenon-Scheinwerfer
84
unverändert
neu

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung auf drei Steuergeräte
85
13
Use case ‘Front-Light Management’ – Multiple ECUs
CAN Bus
ECU-Hardware
AUTOSAR RTE
Standardized Interface
Microcontroller Abstraction
ECUAbstraction
AUTOSARInterface
Std. Interface
StandardizedInterface
Communi-cation
Std. Interface
CAN Driver PWM
AUTOSAR Interface
Xenonlight
set_light(type, mode)
set_current (…)
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
StandardizedInterface
Communi-cation
Std. Interface
DIO
check_switch ()
AUTOSAR Interface
LightRequest
switch_event(event)
switch_event
(event)request_light
(type, mode)
AUTOSAR Interface
Front-Light Manager
get_keyposition()
request_light(type, mode)
set_light(type, mode)
Microcontroller Abstraction
Standardized Interface
StandardizedInterface
Communi-cation
Std. Interface
CAN Driver
ECU-Hardware
AUTOSAR RTE
CAN Driver
Operating System
Communication Control
Memory Management
Drivers
Hardware
ECU3
Operating System
Communication Cont.
Memory Management
Drivers
Hardware
ECU4
Operating System
Communication Cont.
Memory Management
Drivers
Hardware
ECU5

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Verteilung auf 3 Steuergeräte
86
unverändert
neu

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
http://www.volkswagen.de/de/Volkswagen/InnovationTechnik/technik-lexikon.html
87

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Xenon-Scheinwerfer
88
Xenon-Scheinwerfer bieten deutliche Verbesserungen gegenüber konventionellen Halogenlampen. Sie entlasten den Fahrer bei Nachtfahrten durch ihr dem Tageslicht ähnliches Lichtspektrum und führen damit zu mehr Sicherheit. Sie zeichnen sich durch eine große Reichweite sowie eine sehr gute Seitenausleuchtung aus. Weitere Pluspunkte sind der geringe Energieverbrauch sowie die Haltbarkeit, die konventionellen Halogen-Lampen überlegen ist.
Als Lichtquelle dient eine so genannte "Gasentladungslampe":Durch einen Funkenüberschlag zwischen zwei Elektroden entsteht in der Xenongas-Atmosphäre im Lampenkolben ein ionisierter Gasschlauch, durch den dann elektrischer Strom fließt, der das Gasgemisch in Form eines Lichtbogens zum Leuchten anregt. Für den Betrieb dieser Lampen ist eine aufwendige Elektronik erforderlich, um unter anderem die hohe Zündspannung von 18.000 bis 30.000 Volt zu erzeugen und das automatische Wiederzünden und den konstanten Betrieb (bei nur 35 Watt Leistung) zu gewährleisten.
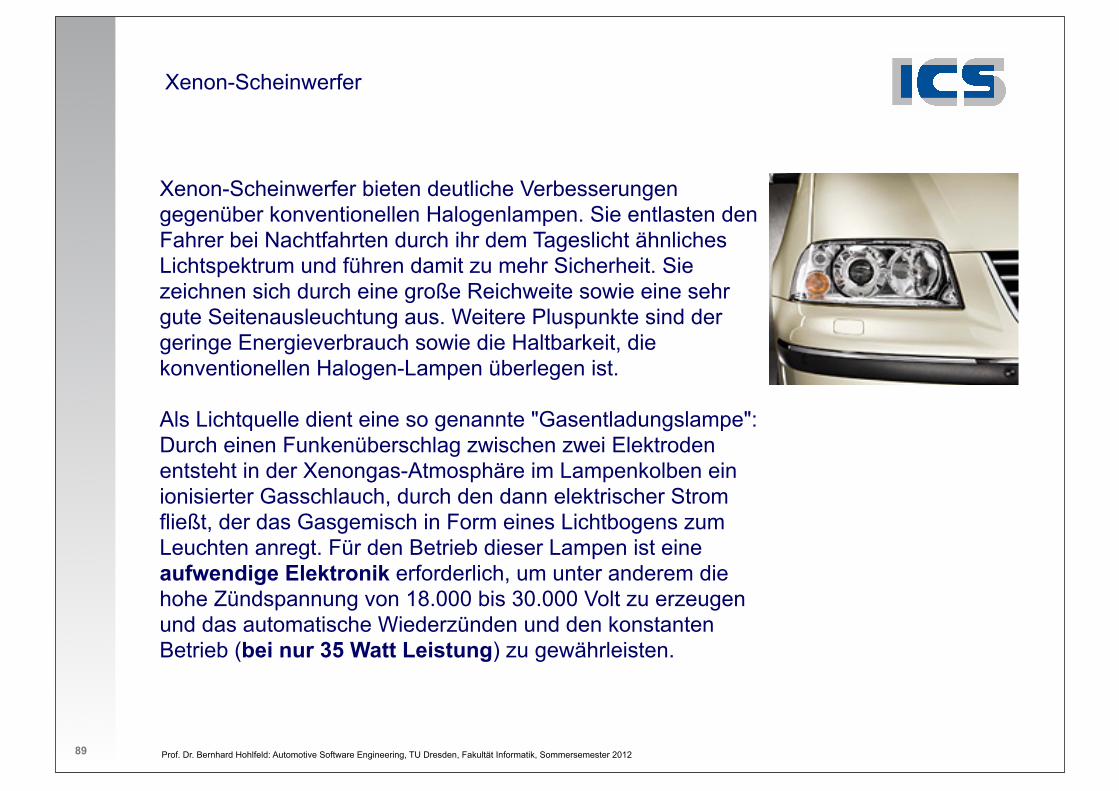
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Xenon-Scheinwerfer
89
Xenon-Scheinwerfer bieten deutliche Verbesserungen gegenüber konventionellen Halogenlampen. Sie entlasten den Fahrer bei Nachtfahrten durch ihr dem Tageslicht ähnliches Lichtspektrum und führen damit zu mehr Sicherheit. Sie zeichnen sich durch eine große Reichweite sowie eine sehr gute Seitenausleuchtung aus. Weitere Pluspunkte sind der geringe Energieverbrauch sowie die Haltbarkeit, die konventionellen Halogen-Lampen überlegen ist.
Als Lichtquelle dient eine so genannte "Gasentladungslampe":Durch einen Funkenüberschlag zwischen zwei Elektroden entsteht in der Xenongas-Atmosphäre im Lampenkolben ein ionisierter Gasschlauch, durch den dann elektrischer Strom fließt, der das Gasgemisch in Form eines Lichtbogens zum Leuchten anregt. Für den Betrieb dieser Lampen ist eine aufwendige Elektronik erforderlich, um unter anderem die hohe Zündspannung von 18.000 bis 30.000 Volt zu erzeugen und das automatische Wiederzünden und den konstanten Betrieb (bei nur 35 Watt Leistung) zu gewährleisten.

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Bi-Xenon-Scheinwerfer
Der Bi-Xenon-Scheinwerfer ("Bi" = Zwei) ist eine Weiterentwicklung des Xenon-Scheinwerfers. Mit einem Scheinwerfer können sowohl Abblend- als auch Fernlicht erzeugt werden. Eine bewegliche Blende (Shutter) schirmt beim Abblendlicht einen Teil des Lichtstrahls ab. Wird die Lichthupe, beziehungsweise das Fernlicht betätigt, wird die Blende aus dem Lichtstrahl bewegt und gibt die zusätzliche Leuchtkraft frei.
90

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung Limousine - Kabrio, Kombi
91
neu (teilweise)
neu (eventuell)
neu (teilweise)

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung an andere Modelle
92

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung an andere Modelle bei gleicher Funktionsarchitektur
93
unverändert

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung an andere Modelle bei gleicher E/E-Architektur
94
unverändert

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung an andere Modelle bei gleicher Vernetzung/Verkabelung
95
unverändert

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
SystementwicklungAUTOSAR-Methode
Anpassung an andere Modelle bei gleicher Funktionsarchitektur, gleicher E/E-Architektur und gleicher Vernetzung/Verkabelung
96
unverändert
unverändert
unverändert

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Cabriolet
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Cabriolet
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
System DescriptionVerteilung der Funktionen auf die Steuergeräte
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
97
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
System DescriptionVerteilung der Funktionen auf die Steuergeräte
System Communication-MatrixVernetzung der Steuergeräte
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck
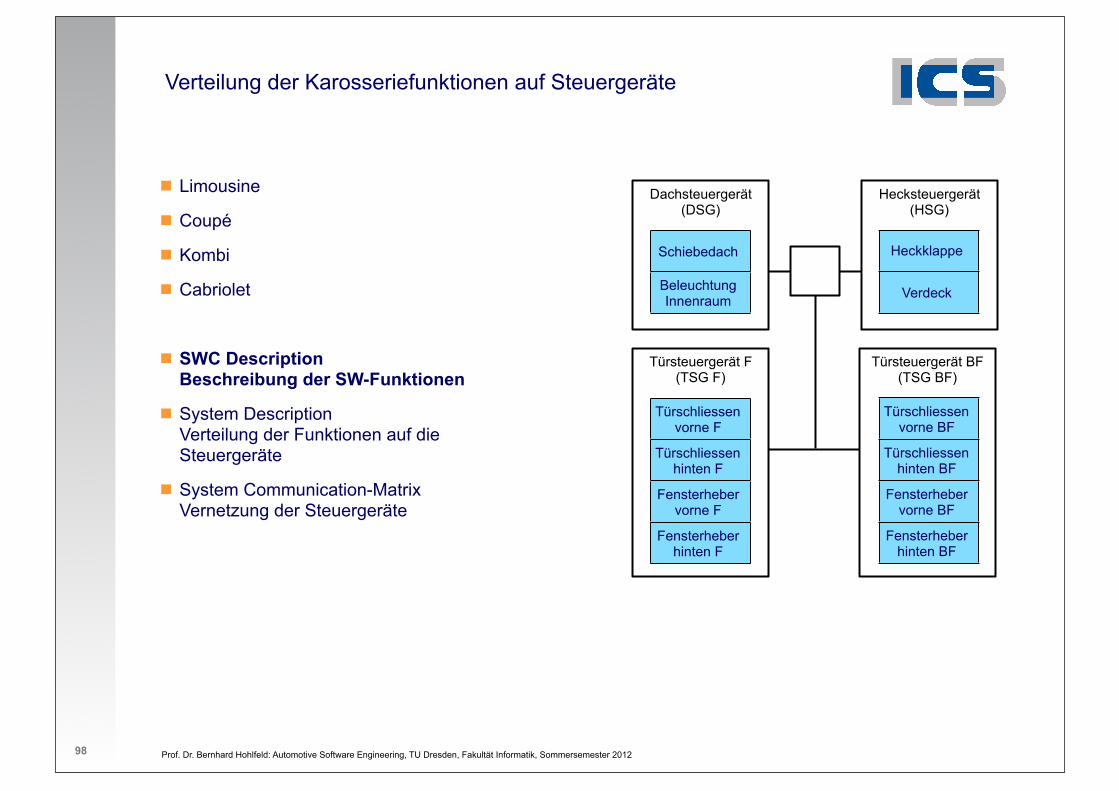
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
98
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
System DescriptionVerteilung der Funktionen auf die Steuergeräte
System Communication-MatrixVernetzung der Steuergeräte
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
99
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
System DescriptionVerteilung der Funktionen auf die Steuergeräte
System Communication-MatrixVernetzung der Steuergeräte
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Verteilung der Karosseriefunktionen auf Steuergeräte
100
Limousine
Coupé
Kombi
Cabriolet
SWC DescriptionBeschreibung der SW-Funktionen
System DescriptionVerteilung der Funktionen auf die Steuergeräte
System Communication-MatrixVernetzung der Steuergeräte
Türsteuergerät F (TSG F)
Türschliessen vorne F
Türschliessen hinten F
Fensterheber vorne F
Fensterheber hinten F
Dachsteuergerät (DSG)
Schiebedach
Beleuchtung Innenraum
Türsteuergerät BF (TSG BF)
Türschliessen vorne BF
Türschliessen hinten BF
Fensterheber vorne BF
Fensterheber hinten BF
Hecksteuergerät (HSG)
Heckklappe
Verdeck

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Soweit zur Theorie, in der Praxis
„Es gibt nur wenige AUTOSAR-Schnittstellen weils so aufwendig ist.“
Folgende Punkte aus dem Vortrag von Dipl.-Phys. Andreas Möstel, Robert-Bosch GmbH sollten in Erinnerung bleiben:
Bosch verwendet für die Implementierung des Steuergerätes DCM ein Autosar Stack von Elektrobit mit 7 BMW spezifischen Modulen und einer MCAL Anpassung von Infineon.
Die jetztige Tool Landschaft und Unterstützung macht die Einbindung von neuen Funktionalitäten (wie z.B. eines neuen Signals) sehr aufwändig, an vielen Komfigurationsdateien des AUTOSAR Stacks muss geändert werden und die Konsistenz wird nicht durch die Tools unterstützt.
Die Konfiguration des AUTOSAR Stacks erlaubt keinen Merge-Funktion. Beispiel 80% ist von Projekt übernehmbar und nur 20% wäre auszutauschen für eine andere Baureihe oder OEM. Dazu muss der komplette Stack getrennt und isoliert verwaltet und konfiguriert werden.
101
Das AUTOSAR-Diagnosemodul DCM:Diagnostic Communication ManagerDas Bemühen um eine Reduzierung der Fehleranfälligkeitrückt besonders die Diagnose in den Mittelpunkt. Deshalbhat die Qualität der so genannten Onboard- und Offboard-Diagnose und der Entwicklung von Diagnosesoftware inden letzten Jahren immer mehr Bedeutung gewonnen.Auch AUTOSAR hat sich diesem Thema eingehend gewid-met. Während ältere Implementierungen von Diagnose-modulen im Wesentlichen auf proprietären Schnittstellenaufsetzen und Diagnosedienste größtenteils nicht umfas-send konfiguriert werden konnten, stellt AUTOSAR ein uni-verselles und flexibles Diagnosemodul zur Verfügung. AlleSchnittstellen des DCM-Moduls sind standardisiert –sowohl zwischen DCM und Applikation als auch zu denanderen BSW-Modulen. Dadurch kann das Diagnosemodul
problemlos ausgetauscht und wieder verwendet werden.Durch seine einfache Konfigurierbarkeit wird die Integra-tion in die Anwendung wesentlich erleichtert. Für die Konfiguration der Basissoftware ergeben sichbesondere Vorteile, wenn auf bereits bestehende Daten-quellen, zum Beispiel eine Diagnosespezifikation im ODX-Format, zurückgegriffen werden kann. Ziel der Softing-Aktivitäten ist es, an geeigneter Stelle die Verbindung zwi-schen Standards wie ASAM-ODX oder FIBEX und AUTO-SAR in einer einheitlichen Werkzeugumgebung anzubietenund damit das Potenzial für erhebliche Kosten- und Quali-tätsvorteile zu schaffen.Aufgabe des DCM-Moduls ist es, die von den unteren Lay-ern empfangenen Requests entgegenzunehmen, nachDiagnosediensten (OBD – ISO 15031-5 [3] und UDS – ISO14029-1 [4]) zu untersuchen und die Verarbeitung in derApplikation oder in anderen AUTOSAR-BSW-Modulenanzustoßen. Neben der Überprüfung der Timingparameterund der Abarbeitung des „Suppress Handlings“ nimmt dasDCM-Modul die Responses von der Applikation entgegenund reicht die Nachrichten an die unteren Layer weiter. DasDCM-Modul verfügt somit über Schnittstellen zur Applika-tion, zum DEM (Diagnostic Event Manager) und Commu-nication Manager sowie zum PDU-Router (Bild 2).
Das DCM ermittelt also die Service-ID der eingegangenenNachricht und ruft die vorgesehene Applikationsfunktionaus der „Service Identifier Table” auf. Des Weiteren wer-den in der Service Identifier Table “Security Access Level”und “Session Control Level” der Service-IDs konfiguriert.Die Applikation kann die Verarbeitung der Dienste startenund nach Beendigung der Verarbeitung die Diagnose-Response an das DCM-Modul übergeben. Wird diese Ant-wort nicht innerhalb der konfigurierten Zeit gegeben, sosendet das DCM selbstständig die „ResponsePending-Nachricht“. Die Applikationsschnittstelle wird über dasAUTOSAR Runtime Environment (RTE) mit dem DCM ver-bunden.Um die aktuellen oder gespeicherten Fehlereinträge unddie zugehörigen Freeze-Frame-Daten des Steuergerätsauszulesen oder zu löschen, werden vom DEM (Diagnostic
Event Manager) zahlreiche Schnittstellen-funktionen bereitgestellt, die vom DCM ingeeigneter Reihenfolge aufgerufen werdenkönnen. Die Schnittstelle zum Communica-tion Manager (COM) beschränkt sich imWesentlichen auf den Austausch der Infor-mationen zum aktuellen Kommunikations-status. Vom PDU-Router werden die Nach-richten von den Modulen der verschiedenenBussysteme (CAN/LIN/ FlexRay) an denDCM weitergereicht.Das DCM-Modul besteht aus drei Schichten:! DSL – Diagnostic Session Layer! DSD – Diagnostic Service Dispatcher! DSP – Diagnostic Service ProcessingDie DSL-Schicht stellt die Schnittstelle zumPDU-Router zur Verfügung. Die Verarbeitungder Kommunikationsnachrichten besteht auseinem synchronen und asynchronen Anteil:
Asynchrone Funktion: Eine Nachricht wird empfangenund das DSL-Modul prüft, ob die Nachricht zugelassenwerden soll. Gegebenenfalls wird eine aktive Kommunika-tionen mit geringerer Priorität unterbrochen. Darüber hin-aus werden Timer zur Kommunikationsüberwachunggestartet.Synchrone Funktion: Zyklisch hingegen wird der Ablaufder Timer überwacht, das „Session Handling” und “Secu-rity Access Handling” verwaltet und das „SpecificRespon-se-Verhalten“ (z. B. Antwort auf den Service „TesterPre-sent“) abgearbeitet.Aufgabe der DSD-Schicht ist das Aufbereiten des empfan-genen Diagnosedatenstroms. Dazu gehört:! Weiterverarbeitung des empfangenen Diagnose-Re-quests und Weiterreichen der vorverarbeiteten Daten andie vorgesehene Anwendungsfunktion! Entgegennahme und Aufbereitung der Diagnose-Res-ponse von der Applikation sowie Starten des Sendevor-gangs durch Ansteuerung der unteren Layer! Spezielle Funktionen wie Entgegennahme sehr langerDiagnose-Responses von der Applikation, Unterdrückungvon „positiven“ Responses bei funktionalen Requests undselbstständiges Senden bestimmter „negativer“ Respon-ses (z. B. „ServiceNotSupported“)
42 lA U T O M O T I V E 11- 12. 200 5 lS Y S T E M E
Bild 2: Schnittstellen und Aufbau des DCM-Moduls© automotive

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Unterschiedliche Interessen
Automobilhersteller
Wiederverwendung
Austauschbarkeit von Zulieferern
Kostensenkung durch geringere Einkaufspreise
Zulieferer
Wiederverwendung
Verkauf an verschiedene Kunden
Kostensenkung durch höhere Stückzahlen
Keine Austauschbarkeit
Werkzeughersteller, BSW-Anbieter
Keine Austauschbarkeit
Halbleiterhersteller
Ein MCAL für alle BSW unabhängig vom BSW-Anbieter
102

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
CUBAS
Bosch entwickelt eine eigene AUTOSAR-Basis-Software, die für alle Steuergeräteplattformen der Geschäfts- und Produktbereiche des gesamten Unternehmensbereichs Kraftfahrzeugtechnik (UBK) eingesetzt wird. Sie wird als CUBAS (Common UBK Basis-Software) bezeichnet.
103
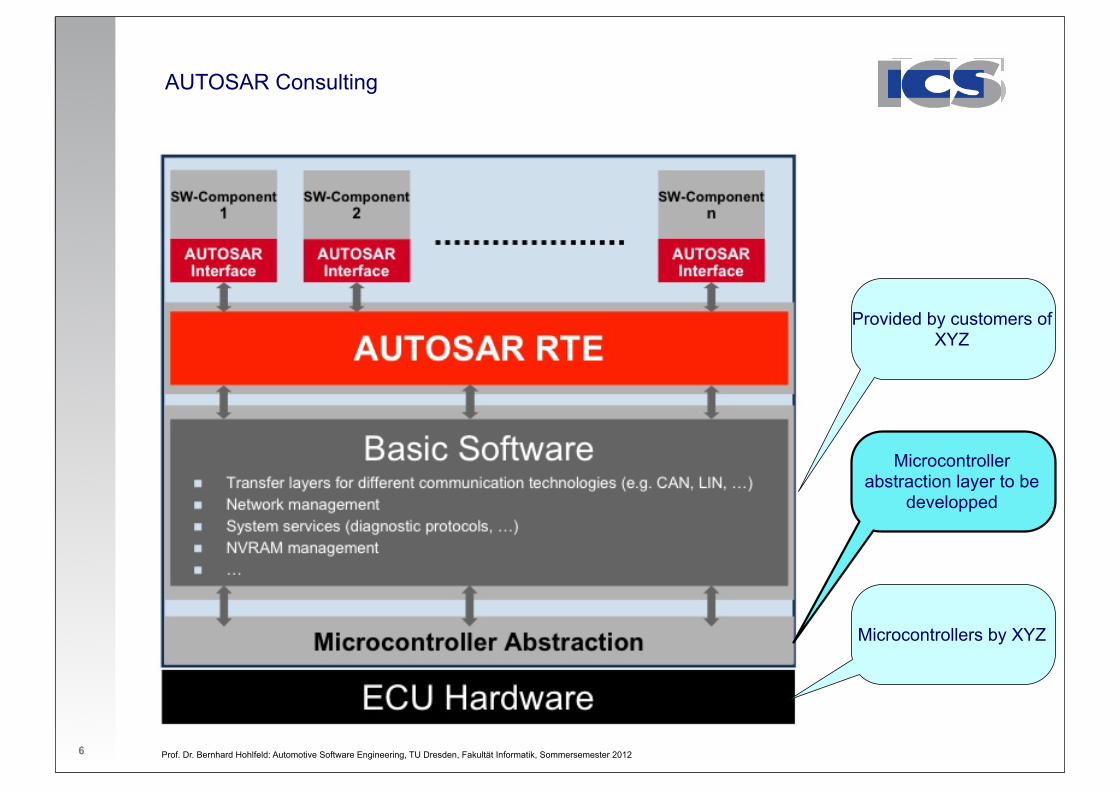
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 6
AUTOSAR Consulting
6
Microcontrollers by XYZ
Microcontroller abstraction layer to be
developped
Provided by customers of XYZ

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Artop – AUTOSAR Tool Platform
105
!"#$%!&'#(()'*)+,-(./
012'3+.'4#
!"#$%&'$()
*'+,-$. */)01*2$),,3$43&+5,'67*'+,-7
!"#$%&'()*+,-.&-
/,0&12&-(3445

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 2
1. Organisation
2. Schichtenmodell
3. Systementwicklung
4. Bussysteme im KFZ
5. Software-Architektur
6. Anwendungsbeispiele
7. Geplante AUTOSAR-Anwendungen
7. Normen und Standards 1. AUTOSAR
106

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Initial WP structure Phase III
Existence of Work Packages will
depend on sufficient
participation
Work Packages
Functional Safety
WP-1.3
Body and Comfort
WP-10.1
Powertrain
WP-10.2
Chassis Control
WP-10.3
Occupants and Pedest. Safety
WP-10.4
Methodology and Configuration
WP-1.2
Conformance Test Specification
WP-2.2
Software Architecture
1.1
Software Architecture
and OS
WP-1.1.1Vehicle and
Application Mode Mgmt.
WP-1.1.2
COM Stack
WP-2.1.1
MCALWP-2.1.3
Diagnostics
WP-2.1.4
Basic Software
2.1Basic Software
Validation
WP-3.1
MM / T / HMI
WP-10.5
1
System Architecture
2
Software and Test Specification
3
Validation
Coordination of Appl. Interfaces
WP-10.0
10
Application Interfaces
LibrariesWP-2.1.5
VFB and RTE
WP-1.1.5
Lead Work Package
WP-x.y
Work Package
WP-x.y
107
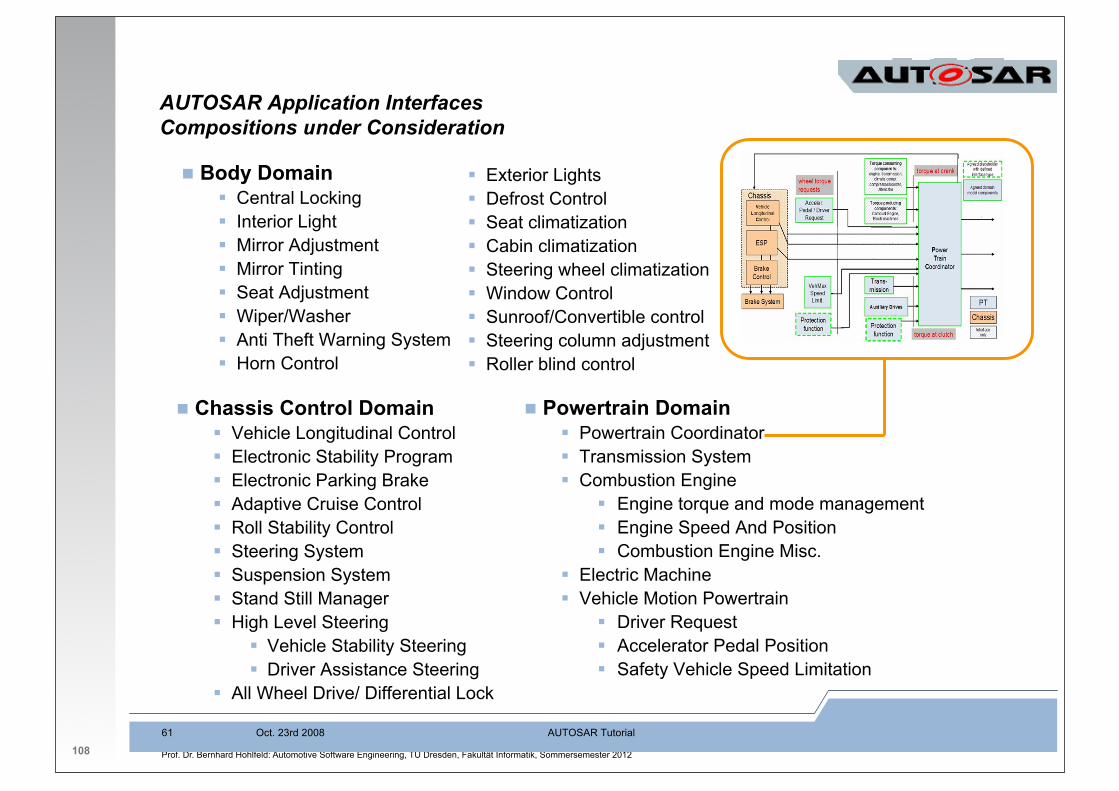
Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 108AUTOSAR TutorialOct. 23rd 200861
! Powertrain Domain" Powertrain Coordinator
" Transmission System
" Combustion Engine
" Engine torque and mode management
" Engine Speed And Position
" Combustion Engine Misc.
" Electric Machine
" Vehicle Motion Powertrain
" Driver Request
" Accelerator Pedal Position
" Safety Vehicle Speed Limitation
! Chassis Control Domain" Vehicle Longitudinal Control
" Electronic Stability Program
" Electronic Parking Brake
" Adaptive Cruise Control
" Roll Stability Control
" Steering System
" Suspension System
" Stand Still Manager
" High Level Steering
" Vehicle Stability Steering
" Driver Assistance Steering
" All Wheel Drive/ Differential Lock
! Body Domain" Central Locking
" Interior Light
" Mirror Adjustment
" Mirror Tinting
" Seat Adjustment
" Wiper/Washer
" Anti Theft Warning System
" Horn Control
" Exterior Lights
" Defrost Control
" Seat climatization
" Cabin climatization
" Steering wheel climatization
" Window Control
" Sunroof/Convertible control
" Steering column adjustment
" Roller blind control
AUTOSAR Application Interfaces
Compositions under Consideration

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 108AUTOSAR TutorialOct. 23rd 200861
! Powertrain Domain" Powertrain Coordinator
" Transmission System
" Combustion Engine
" Engine torque and mode management
" Engine Speed And Position
" Combustion Engine Misc.
" Electric Machine
" Vehicle Motion Powertrain
" Driver Request
" Accelerator Pedal Position
" Safety Vehicle Speed Limitation
! Chassis Control Domain" Vehicle Longitudinal Control
" Electronic Stability Program
" Electronic Parking Brake
" Adaptive Cruise Control
" Roll Stability Control
" Steering System
" Suspension System
" Stand Still Manager
" High Level Steering
" Vehicle Stability Steering
" Driver Assistance Steering
" All Wheel Drive/ Differential Lock
! Body Domain" Central Locking
" Interior Light
" Mirror Adjustment
" Mirror Tinting
" Seat Adjustment
" Wiper/Washer
" Anti Theft Warning System
" Horn Control
" Exterior Lights
" Defrost Control
" Seat climatization
" Cabin climatization
" Steering wheel climatization
" Window Control
" Sunroof/Convertible control
" Steering column adjustment
" Roller blind control
AUTOSAR Application Interfaces
Compositions under Consideration
UnterhaltungselektronikEntertainment
Telematik ?

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 109
AUTOSAR Release 4.0 Examples for Application Interfaces
20
CAN Bus
ECU-Hardware
AUTOSAR RTE
Standardized Interface
Microcontroller Abstraction
ECUAbstraction
AUTOSAR Interface
Std. Interface
Standardized Interface
Communi- cation
Std. Interface
CAN Driver PWM
AUTOSAR Interface
Xenonlightset_light(type, mode)
set_current (…)
ECU-Hardware
AUTOSAR RTE
Standardized Interface
Microcontroller Abstraction
Std. AUTOSAR Interface
Services
Std. Interface
ECUAbstraction
AUTOSAR Interface
Std. Interface
Standardized Interface
Communi- cation
Std. Interface
DIO
Microcontroller Abstraction
Standardized Interface
Standardized Interface
Communi- cation
Std. Interface
CAN Driver
ECU-Hardware
AUTOSAR RTE
CAN Driver
AUTOSAR Int.
SwitchEventcheck_switch ()
switch_event (event)
AUTOSAR Interface
LightRequestswitch_event(event)
request_light (type, mode)
AUTOSAR Interface
Front-Light Manager
get_keyposition()request_light(type, mode)
set_light(type, mode)
Park Distance Control
Exterior light
Mirror adjustments
Seat adjustments
Anti Theft System
Interior light
Defrost control
Remote keyless entry
and many more
May 13, 2010 AUTOSAR Technical Overview

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
110
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
110
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
IP

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
110
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
IP
AUTOSAR 4.0

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
110
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
IP
MOST!!
AUTOSAR 4.0

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software Module
110
20
AUTOSAR Runtime Environment (RTE)
Application Layer
Microcontroller
AD
C
DIO
CC
U
PW
M
LIN
CA
N
SP
I
EE
PR
OM
FLA
SH
WD
T
GP
T
Ext. B
US
MC
U
Pow
er &
Clock U
nit
µC
e.g. CC
U
e.g. PC
P
e.g. TP
U
FlexR
ay
SC
I
I/O Drivers
PO
RT
Driver
AD
C D
river
DIO
Driver
PW
M D
river
ICU
Driver
Microcontroller Drivers
Watchdog D
river
MC
U D
river
GP
T D
river
Communication Drivers
CA
N D
river
LIN D
river
SP
I Handler D
river
Memory Drivers
RA
M T
est
internal EE
PR
OM
D
river
internal Flash D
river
Communication Services
Generic NM Interf.
FlexR
ay NMFlexRay
TP
DCMDiagnostic
Com.Manager
IPDU Multi-plexer
Communication Hardware Abstraction
Memory Services
NVRAM Manager
CR
C Lib
Flash C
heck
System Services
Function Inhibition M
anager FIM
Watchdog M
anager
Developm
ent Error
Tracer
Diagnostic E
vent M
anager DE
M
AU
TO
SA
R O
S
I/O Hardware Abstraction
Memory Hardware Abstraction
Memory Abstraction Interface
Onboard Device Abstraction
External Watchdog
Driver
CAN NM
CAN TP
Ext. Flash Driver
Flash EEPROM Emulation
FR
Driver
LIN Interface
Ext. C
AN
D
river
CAN Interface
CA
N transc
Driver
Ext. F
R
Driver
FR InterfaceF
R transc
DriverExt. EEPROM
Driver
EEPROM Abstraction
Watchdog Interface
PDU Router
LIN TP
AUTOSAR COM
LIN C
omm
unication S
tack
BS
W S
cheduler
Com
munication
Manager
I/O Hardware Abstraction
AUTOSAR Basic Software Modules
CANSM
LINSM
FRSM
EC
U S
tate Manager
LIN CAN Flexray
IP
MOST!!
Mittlerweile Realisierungen von
BSW-Anbietern
AUTOSAR 4.0

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
AUTOSAR Basis Software ModuleMicrosar von Vector Informatik
111

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012 112
AUTOSAR Roll-Out
The AUTOSAR Core Partner Exploitation Plan (2008 - 2012)
8. October 200926
Core Partner 2008 2009 2010 2011 2012
! !10 AUTOSAR BSW
modules as part of Std Core in
vehicles, tool / serial support in
place
! Powertrain-, Chassis-,
Safety-, Body- ECUs use
AUTOSAR architecture
! Body Computer with subset
of AUTOSAR specs
incorporated
! Instrument Cluster with
subset of AUTOSAR specs
incorporated
! ACC ECU using
AUTOSAR architecture.
! Powertrain EDC/ME(D)17
ECUs using AUTOSAR
architecture
! Domain Control Unit using
AUTOSAR BSW
! Chassis ECU using
AUTOSAR architecture
! Body Computer using
AUTOSAR architecture
! Complete BSW Stack as
Product
! AUTOSAR Configuration
Tool
! Body ECUs using
AUTOSAR architecture
! Powertrain ECUs using
AUTOSAR architecture
! Chassis ECUs using
AUTOSAR architecture
! Engine Systems Platform
based on AUTOSAR
architecture
! First usage of AUTOSAR
modules in vehicles
! First AUTOSAR compa-
tible ECUs in vehicles
! Introduction of AUTOSAR
architecture and methodology
in vehicles
! 1-2 AUTOSAR conformant
ECUs; first use of conformant
tools/methodology
! Continuous roll-out of ECUs
into vehicle architecture
increased use of conformant
tools / methodology
! First usage of AUTOSAR
modules
! First use of AUTOSAR
architecture ECU
! Powertrain ECU using
AUTOSAR architecture! Body ECU using
AUTOSAR architecture
! First usage of AUTOSAR
modules! AUTOSAR Architecture ECU
! First AUTOSAR modules
in series production
! First complete ECUs
in series production
AUTOSAR – A Worldwide Standard is on the Road

Prof. Dr. Bernhard Hohlfeld: Automotive Software Engineering, TU Dresden, Fakultät Informatik, Sommersemester 2012
Weiterführende Literatur
O. Kindel, M. Friedrich:Softwareentwicklung mit AUTOSARGrundlagen, Engineering, Management in der Praxisdpunkt.verlag, 2009.
AUTOSAR: Automotive Open System Architecture, "http://www.autosar.org".
AUTOSAR Tutorial: http://www.autosar.org/download/conferencedocs/03_AUTOSAR_Tutorial.pdf
AUTOSAR Software Modules, Specialized GlossaryVector Informatik GmbH.(In der Vorlesung verteilt)
113