Versatile General Motion Control Software - Soft...
12
Powerful PC-Based Affordable Scalable ™ The SMP Series 4.0: Versatile General Motion Control Software
Transcript of Versatile General Motion Control Software - Soft...

Powerful
PC-Based
Affordable
Scalable
™ The SMP Series 4.0: Versatile General Motion Control Software

The SMP™ Series 4.0:
SMP general motion controllers provide high-end motion control functions (up to 32 axes), an industry-standard PLC, and a Windows-based GUI, in a single software package. These “soft motion” controllers are truly PC-based, providing all-software motion and machine control solutions that require no proprietary motion control/PLC boards.
SMP products run on Windows 2000, Windows XP or Windows XPe, with a real-time kernel such as IntervalZero’s RTX® or INtime® by TenAsys. SMP software can be easily ported to embedded platforms such as VxWorks® or embedded Linux for a target application. The SMP series is packaged for the number of axes to control: SMP450, SMP850, SMP1600 and SMP3200, for 4, 8, 16 or 32 axes (respectively). SMP products are available with a choice of many servo and I/O communications platforms, including EtherCAT, YASKAWA MECHATROLINK™ and Panasonic Realtime Express™.
Utility software applications are provided that facilitate the setup, configuration, servo tuning and testing of an SMP system, as well as real-time monitoring of motion, I/O and PLC status.
SMP Advantages and Features

Versatile, Function-Rich Motion API Libraries
The core part of the SMP software is its versatile, function-rich motion API libraries that allow users to develop their own motion control applications. Developers can design and customize SMP applications in the real-time subspace (RTOS) through the real-time API and/or in the Win32 subspace through the Windows API. SMP Windows applications can be created using .NET 2.0 or the legacy Visual Studio 6.0 (C/C++, Visual Basic 6.0).
SMP motion libraries embed a variety of advanced motion control functions featuring high-speed 32-axis synchronization, various interpolations, multi-system (channel) controls, electric cam/gear, PLC-axis control, position synchronous output, many smoothing filters, block buffering, and user profile motion control, to name a few. Even a G code parser is integrated, to process and execute CNC programs. These advanced, flexible motion control functions make the SMP ideal for motion control applications in many industries: semiconductor equipment, flat panel/solar panel equipment, packaging, materials handling, pick and place, converting, food processing, laser cutting/engraving, plasma cutting, wood-working, and even general machine tools.
SMP Included Components
The SMP Motion Engine — a real-time soft motion control engine for high-performance, highly-coordinated motion control of up to 32 axes
The SMP Console — a Windows application that allows users to set up, tune and run an SMP system. A memory mode operation is provided to program and run motion programs in G code.
A real-time kernel for Windows (RTX or INtime)
LadderWorks PLC, including:
The LadderWorks PLC Engine — a real-time soft PLC engine for industry-standard ladder logic control with axis control modules (independent and individual positioning of PLC axes)
LadderWorks Console — a graphical PLC ladder diagram editor, monitor, debugger and compiler for Windows
PLC utility tools
The SMP Motion Parser — providing powerful, automatic execution of motion programs in G code (for up to 8 axes) for CNC applications
Motion Development Kit (MDK) with C/C++, Visual Basic 6.0 or .NET 2.0 APIs
RealTime Motion Development Kit (RTMDK) with RTX API or INtime API
SMP Offers Great Flexibility
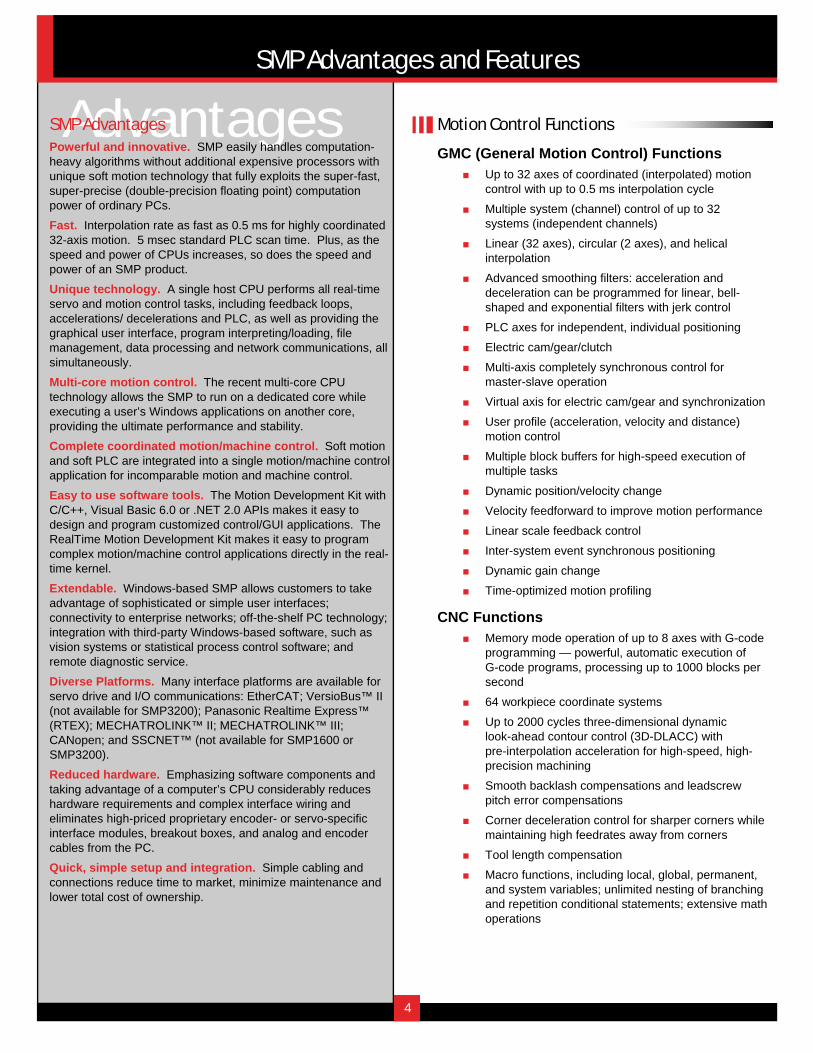
Advantages SMP Advantages Powerful and innovative. SMP easily handles computation-heavy algorithms without additional expensive processors with unique soft motion technology that fully exploits the super-fast, super-precise (double-precision floating point) computation power of ordinary PCs. Fast. Interpolation rate as fast as 0.5 ms for highly coordinated 32-axis motion. 5 msec standard PLC scan time. Plus, as the speed and power of CPUs increases, so does the speed and power of an SMP product. Unique technology. A single host CPU performs all real-time servo and motion control tasks, including feedback loops, accelerations/ decelerations and PLC, as well as providing the graphical user interface, program interpreting/loading, file management, data processing and network communications, all simultaneously. Multi-core motion control. The recent multi-core CPU technology allows the SMP to run on a dedicated core while executing a user’s Windows applications on another core, providing the ultimate performance and stability. Complete coordinated motion/machine control. Soft motion and soft PLC are integrated into a single motion/machine control application for incomparable motion and machine control. Easy to use software tools. The Motion Development Kit with C/C++, Visual Basic 6.0 or .NET 2.0 APIs makes it easy to design and program customized control/GUI applications. The RealTime Motion Development Kit makes it easy to program complex motion/machine control applications directly in the real-time kernel. Extendable. Windows-based SMP allows customers to take advantage of sophisticated or simple user interfaces; connectivity to enterprise networks; off-the-shelf PC technology; integration with third-party Windows-based software, such as vision systems or statistical process control software; and remote diagnostic service. Diverse Platforms. Many interface platforms are available for servo drive and I/O communications: EtherCAT; VersioBus™ II (not available for SMP3200); Panasonic Realtime Express™ (RTEX); MECHATROLINK™ II; MECHATROLINK™ III; CANopen; and SSCNET™ (not available for SMP1600 or SMP3200). Reduced hardware. Emphasizing software components and taking advantage of a computer’s CPU considerably reduces hardware requirements and complex interface wiring and eliminates high-priced proprietary encoder- or servo-specific interface modules, breakout boxes, and analog and encoder cables from the PC. Quick, simple setup and integration. Simple cabling and connections reduce time to market, minimize maintenance and lower total cost of ownership.
4
SMP Advantages and Features
Motion Control Functions
GMC (General Motion Control) Functions Up to 32 axes of coordinated (interpolated) motion
control with up to 0.5 ms interpolation cycle
Multiple system (channel) control of up to 32 systems (independent channels)
Linear (32 axes), circular (2 axes), and helical interpolation
Advanced smoothing filters: acceleration and deceleration can be programmed for linear, bell-shaped and exponential filters with jerk control
PLC axes for independent, individual positioning
Electric cam/gear/clutch
Multi-axis completely synchronous control for master-slave operation
Virtual axis for electric cam/gear and synchronization
User profile (acceleration, velocity and distance) motion control
Multiple block buffers for high-speed execution of multiple tasks
Dynamic position/velocity change
Velocity feedforward to improve motion performance
Linear scale feedback control
Inter-system event synchronous positioning
Dynamic gain change
Time-optimized motion profiling
CNC Functions Memory mode operation of up to 8 axes with G-code
programming — powerful, automatic execution of G-code programs, processing up to 1000 blocks per second
64 workpiece coordinate systems
Up to 2000 cycles three-dimensional dynamic look-ahead contour control (3D-DLACC) with pre-interpolation acceleration for high-speed, high-precision machining
Smooth backlash compensations and leadscrew pitch error compensations
Corner deceleration control for sharper corners while maintaining high feedrates away from corners
Tool length compensation
Macro functions, including local, global, permanent, and system variables; unlimited nesting of branching and repetition conditional statements; extensive math operations
Customized SMP Software Development
SMP Motion Development Kit (MDK)
SMP MDK (Standard Package included) has made it easy for users to create or customize their own Win32 SMP application in C/C++, Visual Studio 6.0 (not available for SMP3200) or .NET 2.0 for Windows 2000/XP/XPe. SMP Motion and Logic APIs with plenty of sample source code in the MDK allow customers to easily program their own GUI or text-based SMP application. These extensive APIs are provided for complete and full access to all real-time processes and resources, including device handling, system initialization, parameter settings, motion control commands, manual operation commands, automated operation commands, testing commands, I/O commands, PLC commands, motion and servo status monitoring, and many more.
The Visual Basic source code of the SMP Console, an intensive motion application for Windows, is available with the MDK.
Also available is the SMP Simulator that allows users to “play” with SMP motion products without having hardware or motors connected to the PC. The SMP Simulator can be used not only for SMP application development, but also for training end users of the developed SMP applications.
Real-Time Motion Development Kit (RTMDK)
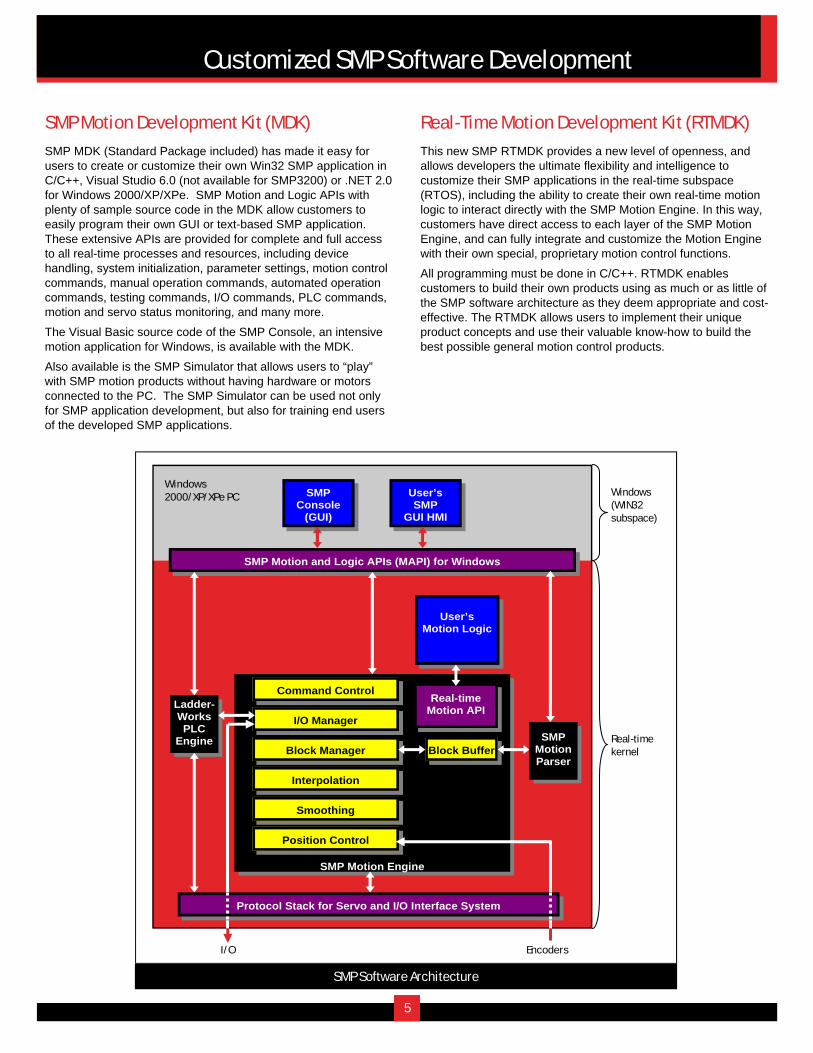
This new SMP RTMDK provides a new level of openness, and allows developers the ultimate flexibility and intelligence to customize their SMP applications in the real-time subspace (RTOS), including the ability to create their own real-time motion logic to interact directly with the SMP Motion Engine. In this way, customers have direct access to each layer of the SMP Motion Engine, and can fully integrate and customize the Motion Engine with their own special, proprietary motion control functions.
All programming must be done in C/C++. RTMDK enables customers to build their own products using as much or as little of the SMP software architecture as they deem appropriate and cost-effective. The RTMDK allows users to implement their unique product concepts and use their valuable know-how to build the best possible general motion control products.
Windows 2000/XP/XPe PC
SMP Motion and Logic APIs (MAPI) for Windows
SMP Motion Engine
Ladder-Works PLC
Engine
SMP Motion Parser
SMP Console
(GUI)
User’s SMP
GUI HMI
Windows (WIN32 subspace)
Real-time kernel
Command Control
I/O Manager
Block Manager
Interpolation
Smoothing
Position Control
Block Buffer
I/O Encoders
Protocol Stack for Servo and I/O Interface System
Real-time Motion API
User’s
Motion Logic
SMP Software Architecture
5
6
The SMP™ Console
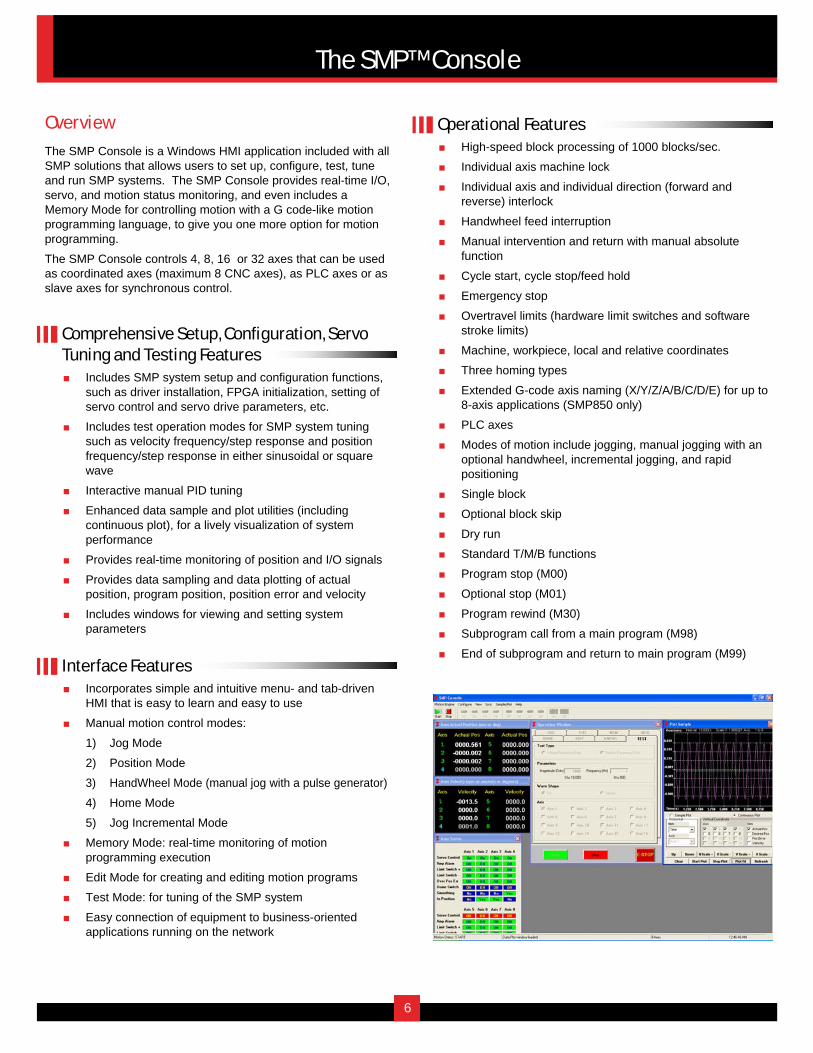
Overview
The SMP Console is a Windows HMI application included with all SMP solutions that allows users to set up, configure, test, tune and run SMP systems. The SMP Console provides real-time I/O, servo, and motion status monitoring, and even includes a Memory Mode for controlling motion with a G code-like motion programming language, to give you one more option for motion programming.
The SMP Console controls 4, 8, 16 or 32 axes that can be used as coordinated axes (maximum 8 CNC axes), as PLC axes or as slave axes for synchronous control.
Operational Features High-speed block processing of 1000 blocks/sec.
Individual axis machine lock
Individual axis and individual direction (forward and reverse) interlock
Handwheel feed interruption
Manual intervention and return with manual absolute function
Cycle start, cycle stop/feed hold
Emergency stop
Overtravel limits (hardware limit switches and software stroke limits)
Machine, workpiece, local and relative coordinates
Three homing types
Extended G-code axis naming (X/Y/Z/A/B/C/D/E) for up to 8-axis applications (SMP850 only)
PLC axes
Modes of motion include jogging, manual jogging with an optional handwheel, incremental jogging, and rapid positioning
Single block
Optional block skip
Dry run
Standard T/M/B functions
Program stop (M00)
Optional stop (M01)
Program rewind (M30)
Subprogram call from a main program (M98)
End of subprogram and return to main program (M99)
Comprehensive Setup, Configuration, Servo Tuning and Testing Features
Includes SMP system setup and configuration functions, such as driver installation, FPGA initialization, setting of servo control and servo drive parameters, etc.
Includes test operation modes for SMP system tuning such as velocity frequency/step response and position frequency/step response in either sinusoidal or square wave
Interactive manual PID tuning
Enhanced data sample and plot utilities (including continuous plot), for a lively visualization of system performance
Provides real-time monitoring of position and I/O signals
Provides data sampling and data plotting of actual position, program position, position error and velocity
Includes windows for viewing and setting system parameters
Interface Features Incorporates simple and intuitive menu- and tab-driven
HMI that is easy to learn and easy to use
Manual motion control modes:
1) Jog Mode
2) Position Mode
3) HandWheel Mode (manual jog with a pulse generator)
4) Home Mode
5) Jog Incremental Mode
Memory Mode: real-time monitoring of motion programming execution
Edit Mode for creating and editing motion programs
Test Mode: for tuning of the SMP system
Easy connection of equipment to business-oriented applications running on the network
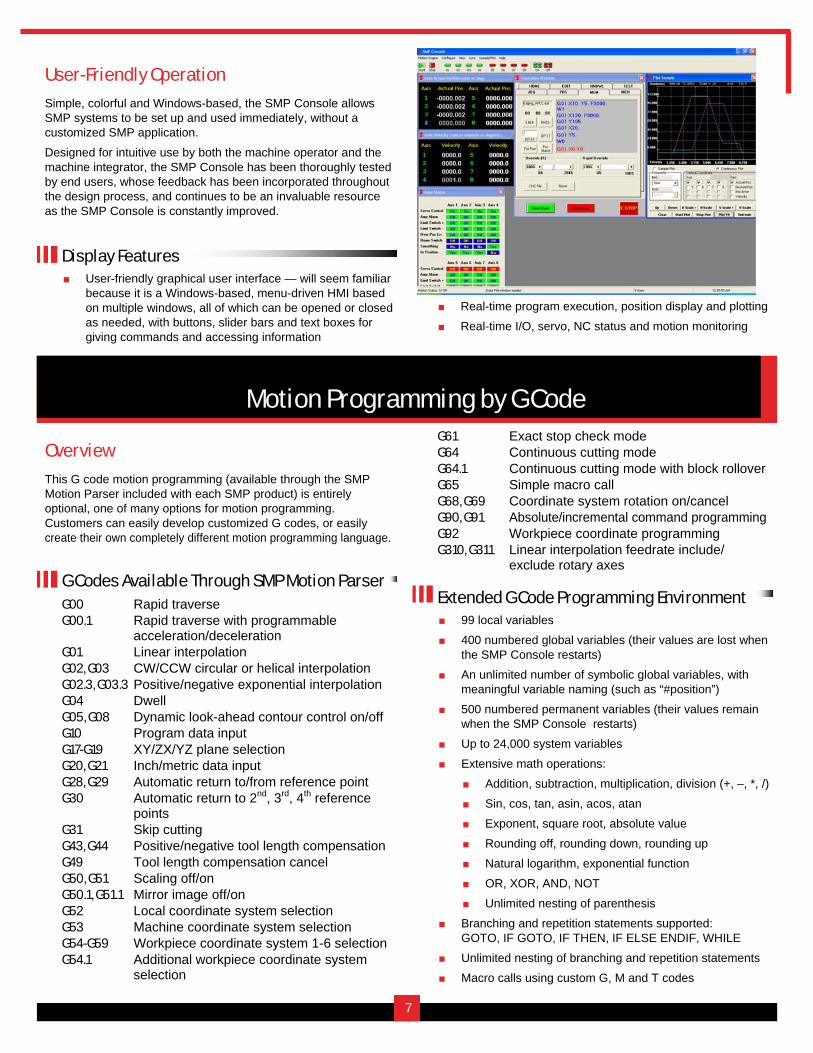
User-Friendly Operation
Simple, colorful and Windows-based, the SMP Console allows SMP systems to be set up and used immediately, without a customized SMP application.
Designed for intuitive use by both the machine operator and the machine integrator, the SMP Console has been thoroughly tested by end users, whose feedback has been incorporated throughout the design process, and continues to be an invaluable resource as the SMP Console is constantly improved.
Display Features User-friendly graphical user interface — will seem familiar
because it is a Windows-based, menu-driven HMI based on multiple windows, all of which can be opened or closed as needed, with buttons, slider bars and text boxes for giving commands and accessing information
Motion Programming by G Code
Overview
This G code motion programming (available through the SMP Motion Parser included with each SMP product) is entirely optional, one of many options for motion programming. Customers can easily develop customized G codes, or easily create their own completely different motion programming language.
G Codes Available Through SMP Motion Parser G00 Rapid traverse G00.1 Rapid traverse with programmable
acceleration/deceleration G01 Linear interpolation G02, G03 CW/CCW circular or helical interpolation G02.3, G03.3 Positive/negative exponential interpolation G04 Dwell G05, G08 Dynamic look-ahead contour control on/off G10 Program data input G17-G19 XY/ZX/YZ plane selection G20, G21 Inch/metric data input G28, G29 Automatic return to/from reference point G30 Automatic return to 2nd, 3rd, 4th reference
points G31 Skip cutting G43, G44 Positive/negative tool length compensation G49 Tool length compensation cancel G50, G51 Scaling off/on G50.1, G51.1 Mirror image off/on G52 Local coordinate system selection G53 Machine coordinate system selection G54-G59 Workpiece coordinate system 1-6 selection G54.1 Additional workpiece coordinate system
selection
G61 Exact stop check mode G64 Continuous cutting mode G64.1 Continuous cutting mode with block rollover G65 Simple macro call G68, G69 Coordinate system rotation on/cancel G90, G91 Absolute/incremental command programming G92 Workpiece coordinate programming G310, G311 Linear interpolation feedrate include/
exclude rotary axes
Extended G Code Programming Environment 99 local variables
400 numbered global variables (their values are lost when the SMP Console restarts)
An unlimited number of symbolic global variables, with meaningful variable naming (such as “#position”)
500 numbered permanent variables (their values remain when the SMP Console restarts)
Up to 24,000 system variables
Extensive math operations:
Addition, subtraction, multiplication, division (+, –, *, /)
Sin, cos, tan, asin, acos, atan
Exponent, square root, absolute value
Rounding off, rounding down, rounding up
Natural logarithm, exponential function
OR, XOR, AND, NOT
Unlimited nesting of parenthesis
Branching and repetition statements supported: GOTO, IF GOTO, IF THEN, IF ELSE ENDIF, WHILE
Unlimited nesting of branching and repetition statements
Macro calls using custom G, M and T codes
Real-time program execution, position display and plotting
Real-time I/O, servo, NC status and motion monitoring
7

LadderWorks PLC
8
LadderWorks Console LadderWorks is a user-friendly PLC ladder editor for developing, monitoring and debugging PLC sequence programs:
Create, edit and compile PLC sequence programs
Export PLC sequence programs in text or executable binary code according to the ladder diagram
Quickly insert functional commands by selecting functions from a pull-down menu, and entering parameters (if any) in pop-up text boxes; insert basic instructions by pointing and clicking on symbols within the easy-to-use GUI
Search and print ladder diagrams
Force component values while monitoring sequence programs
Overview LadderWorks™ PLC is an independent, complete soft PLC package included with all SMP products and featuring:
Ladder Diagram (LD) and Instruction List (IL) format
38 function blocks and 12 basic commands, simplifying the programming of complex machine functions and allowing for quick and easy creation of sequence programs
0.07 μs/step (Pentium IV 2.4 GHz)
Max 40,000 steps
E-mail and telephone alert
PLC utility tools for debugging, such as bit pattern display and time charts showing the history of bit signals
LadderWorks PLC Engine Real-time soft PLC engine for industry-standard ladder
logic control and execution of PLC sequence programs, seamlessly integrated with the SMP Motion Engine into a single motion/machine control application with deterministic, real-time performance
Operates with Fanuc-compatible ladder logic
Up to 416 opto-isolated I/O points (VersioBus II interface system)
Operates with a 5 msec standard scan time, adjustable to 1 msec
Provides 1000 bytes each for X and Y addresses, 400 bytes each for F and G addresses
SMP Software Components
9
The EtherCAT Interface System: Zero Hardware
Hardware Platforms Overview SMP products are available with a choice of many servo and I/O communications hardware platforms, each with its own distinct advantages, based on different communications technologies: EtherCAT, Panasonic Realtime Express™, VersioBus™ II fiber optics, Yaskawa MECHATROLINK™ II and MECHATROLINK™ III, CANopen and Mitsubishi SSCNET™.
Occasionally, Soft Servo Systems develops additional servo communications platforms on request for OEM customers.
For each hardware platform, Soft Servo Systems provides the hardware components and a target protocol stack.
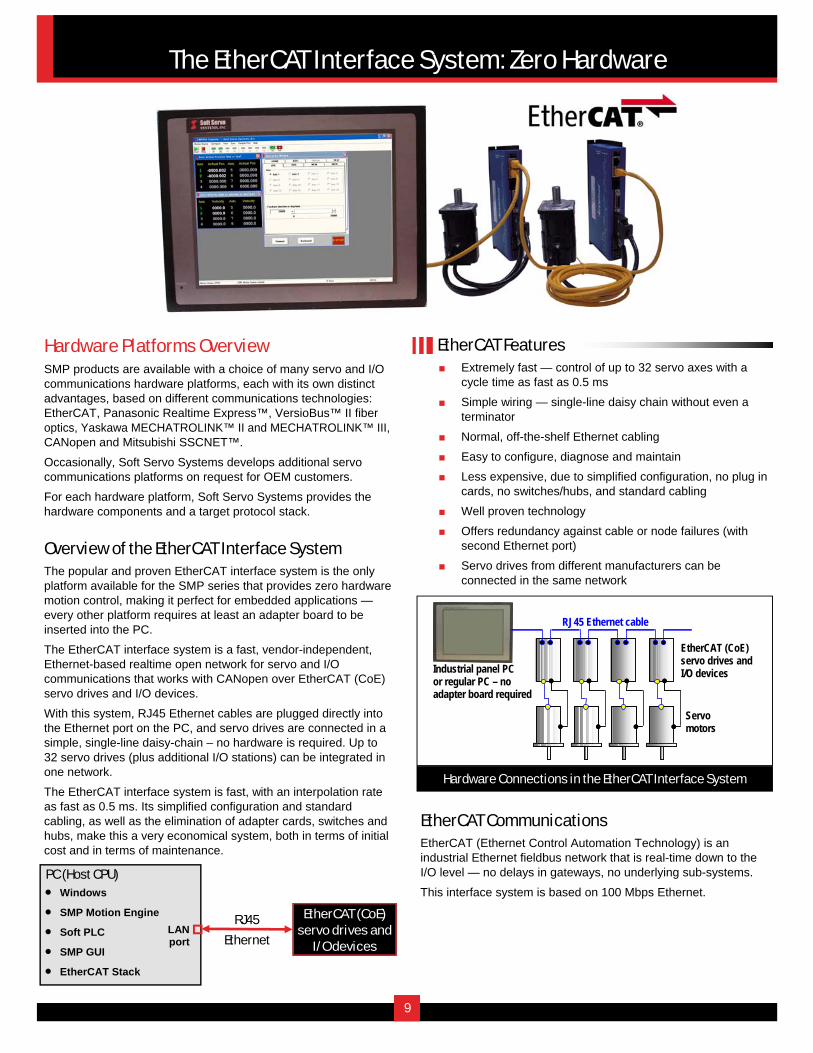
Overview of the EtherCAT Interface System The popular and proven EtherCAT interface system is the only platform available for the SMP series that provides zero hardware motion control, making it perfect for embedded applications — every other platform requires at least an adapter board to be inserted into the PC.
The EtherCAT interface system is a fast, vendor-independent, Ethernet-based realtime open network for servo and I/O communications that works with CANopen over EtherCAT (CoE) servo drives and I/O devices.
With this system, RJ45 Ethernet cables are plugged directly into the Ethernet port on the PC, and servo drives are connected in a simple, single-line daisy-chain – no hardware is required. Up to 32 servo drives (plus additional I/O stations) can be integrated in one network.
The EtherCAT interface system is fast, with an interpolation rate as fast as 0.5 ms. Its simplified configuration and standard cabling, as well as the elimination of adapter cards, switches and hubs, make this a very economical system, both in terms of initial cost and in terms of maintenance.
RJ45
Ethernet
PC (Host CPU) • Windows
• SMP Motion Engine
• Soft PLC
• SMP GUI
• EtherCAT Stack
EtherCAT (CoE) servo drives and
I/O devices LAN port
EtherCAT Communications EtherCAT (Ethernet Control Automation Technology) is an industrial Ethernet fieldbus network that is real-time down to the I/O level — no delays in gateways, no underlying sub-systems.
This interface system is based on 100 Mbps Ethernet.
Servo motors
EtherCAT (CoE) servo drives and I/O devices
RJ45 Ethernet cable
Industrial panel PC or regular PC – no adapter board required
Hardware Connections in the EtherCAT Interface System
EtherCAT Features Extremely fast — control of up to 32 servo axes with a
cycle time as fast as 0.5 ms
Simple wiring — single-line daisy chain without even a terminator
Normal, off-the-shelf Ethernet cabling
Easy to configure, diagnose and maintain
Less expensive, due to simplified configuration, no plug in cards, no switches/hubs, and standard cabling
Well proven technology
Offers redundancy against cable or node failures (with second Ethernet port)
Servo drives from different manufacturers can be connected in the same network

Other Servo and I/O Communications Hardware Platforms
10
A4N
Serv
o Ne
twor
k
AnyWire Gateway & I/O Modules for
Digital, Analog or Pulse I/O Devices
IM-305 General I/O Module(s) Digital I/O
Devices
FPA-200 PCI RTEX
Adapter Board
Panasonic MINAS A4N Servo Drives
and Motors
VersioBus II I/O
Network
VersioBus II Servo and I/O Communications VersioBus™ II, Soft Servo Systems’ original breakthrough technology, was designed to interface with any conventional analog-interfaced servo drive using a single fiber-optic cable, allowing a significant reduction in the number of cables connecting to the PC.
This unique proprietary 5 Mbps fiber-optic digital servo communications technology provides up to 16 axes of servo control and up to 416 points of general digital I/O, and supports incremental encoders (up to 5 MHz), as well as AC and DC motors.
This system offers:
16-bit analog output per axis
Opto-isolated overtravel limits and home switch inputs for each axis
No noise to interfere with system communications
Distributed control and multiple nodes with daisy-chainable servo and I/O interface modules
Fiber-optic cables that go up to 10 meters for widely distributed control (longer cable is available if required)
Reduced cables — a single fiber-optic cable replaces encoder and analog cables to communicate with the host PC
Quick and simple connections make machine integration straightforward, reducing cost and time to market
No maintenance of any connections reduces total cost of ownership — compare this to expensive twisted-pair wire cables, which can require considerable maintenance over the years
VersioBus II is ideal for applications requiring noise resistance. Because VersioBus II is compatible with most motors and with incremental encoders, it is also the ideal choice for servo communications for retrofitting existing machines or machine tools.
VersioBus II I/O
Network
VersioBus II Servo
Network
DC-155 Remote Servo Interface Module(s)
General Analog-Interfaced
Servo Drives
IM-305 General I/O Module(s) Digital I/O
Devices
ISA, PCI or PC104 Dual-Link
VersioBus Adapter Board
Panasonic Realtime Express™ (RTEX) The Panasonic Realtime Express™ (RTEX) is a high-speed (100 Mbps), real-time, Ethernet-based digital synchronous servo communications technology developed by Matsushita Electric Industrial (Panasonic) Co., Ltd. RTEX provides up to 32 axes of service control with cycle times of 0.5 ms to 1 ms, and works with low-cost commercially available Ethernet cables and with Panasonic MINAS A4N servo drive systems from Matsushita Electric Industrial Co., Ltd.
The RTEX system provides high speed, simple wiring and precise synchronization, and allows high resolution and the command of fast motion that is impossible in conventional pulse interfaces. Its very short transmit time maximizes servo performance. Motion commands are reflected in all axes at the same time, so it’s particularly well suited for continuous path motion as well as point-to-point motion.
RTEX allows information such as parameter settings and data monitoring to be exchanged in addition to motion commands, yet wiring is drastically reduced compared to conventional interfaces. The affordable shielded twisted pair cable lowers system costs, while the high noise immunity (in compliance with IEC61000-4-4) provides excellent servo performance.
MINAS A4N Series of Servo Drives and Motors are suitable for applications where large-scale, complicated tasks are required, such as part mounting machines and multi-joint robots — the motor exhibits excellent capabilities specifically in production sites using semiconductor manufacturing equipment, packing/wrapping machines, winding machines, machine tools, fabricating machines, and more
There are three types of I/O for the RTEX interface system:
1) 6 I/O points for each A4N servo drive (for up to 16 servo drives)
2) Optional I/O with a VersioBus II fiber-optic I/O network and daisy-chained I/O modules
3) Optional I/O via an AnyWireBus Gateway (for digital, analog or pulse I/O)
Soft Servo Systems offers Panasonic MINAS A4N servo drives bundled with SMP for the RTEX platform.

11
CANopen Interface System CANopen is a network based on CAN (Controller Area Network) that works with Copley Control’s Accelus™ and Accelnet™ digital servo amplifiers (and third-party servo motors). Up to 32 servo drives (plus additional I/O devices) can be integrated in one network, with a cycle time of 4 ms. Tightly synchronized drives close all servo loops (each servo amplifier closes the servo actuator’s feedback loop locally), and drive parameters can be changed on-the-fly. A CAN PCI adapter board is included with this interface system; servo drives are connected to the PC with RJ45 Ethernet interface cables.
Soft Servo Systems’ Mission: To provide high-performing yet affordable and reliable
motion control solutions to by exploiting the high-speed, ever-improving CPUs of personal computers.
To revolutionize motion control for the manufacturing industry by leveraging and integrating the latest developments in information and software technologies.
Soft Servo Systems, the leading provider of PC-based motion control products, was founded in February 1998 by MIT professionals with funding from private investors.
Soft Servo Systems was among the first to develop a truly PC-based servo controller in which a single, powerful host computer, combined with FPGA technology, performs all real-time servo control operations. Our products integrate and leverage this servo control with the most advanced information and communication technologies. In addition to handling feedback loops, multi-axis coordination and NC path generation, the computer also provides the graphical user interface, data processing, plant monitoring, network communication, file management, and more.
Soft Servo’s SMP Series is based on our unique and proprietary soft motion technology that fully exploits the ever-improving CPUs in personal computers to give customers superior motion control performance. Soft motion technology eliminates the need for a motion control coprocessor card. The multi-axis servo loops are entirely closed in the CPU and provide extremely fast and accurate motion control. The end result is a highly flexible, low cost control system, with exceptional features that traditional PC-based controllers (still requiring motion control boards) cannot provide.
Soft Servo’s soft motion technology enables customers to build their own products without depending on the proprietary information and black box technology provided by other motion control vendors. Our soft motion technology allows users to implement their unique product concepts and use their valuable know-how to build the best possible motion control products. Let Soft Servo’s PC-based motion control help you to achieve the ultimate flexibility and intelligence in building your motion control system.
Soft Servo Systems, Inc. Corporate Profile
MECHATROLINK Interface System MECHATROLINK is an all-digital, reliable, market-proven communications technology for servo and I/O communications, developed by YASKAWA Electric Corporation, the world leader of motion control. Two MECHATROLINK systems are available, each paired with YASKAWA's Sigma V servo system:
MECHATROLINK III is a 100 Mbps Ethernet-based digital servo communications technology that integrates up to 62 stations in one network
MECHATROLINK II is 10 Mbps and integrates up to 30 stations in one network
Sigma V servo motors and amplifiers from YASKAWA represent a massive leap forward in technology from their predecessors, and have many impressive features, such as performance, speed, accuracy, vibrationless motion, user-friendliness and fast setup times.
Through a long-standing business and technical partnership with Yaskawa Electric Corporation, Soft Servo Systems offers single source packages for both MECHATROLINK systems: SMP bundled with YASKAWA Sigma V servo drives and motors.
MEC
HATR
OLIN
K
YASKAWA Sigma V
Servo Drives
YASKAWA Inverters
I/O Devices •Digital I/O •Analog I/O •Pulse/Counter
ISA, PCI or PC104 MECHATROLINK Adapter Board
Mitsubishi SSCNET™ Servo Communications Servo System Controller NETwork (SSCNET) is a high-speed, synchronous serial communications technology, developed by Mitsubishi Electric Corporation. SSCNET provides 8- or 6-axis control (SSCNET and SSCNET II, respectively).
With SSCNET, direct bus access results in better access to data. All data from the servo drives is returned to the controller via SSCNET, eliminating hand-shaking routines often needed to acquire data because all data appears in pre-defined data regis-ter areas. Noise problems are eliminated: all signals (including position data) are sent as serial data, not position pulses.
[SSCNET is not available for SMP1600 or SMP3200.]
SSCNET Mitsubishi MR-J2 Super
AC Servo Drives
FSC-20 SSCNET PCI Adapter Board

Consult the Soft Servo SMP™ Series General Motion Control Product Parts List or your Soft Servo Systems sales representative
regarding standard and optional features for these products.
© Copyright 2009 Soft Servo Systems, Inc. LadderWorks, PLC Engine, SMP Motion Engine, SMP Motion Parser, SMP Console, SoftServo, and VersioBus are trademarks of Soft Servo Systems, Inc. RTX is a registered trademark of IntervalZero, Inc. INtime is a registered trademark of TenAsys Corporation. Realtime Express and Panasonic are registered trademarks of Matsushita Electric Industrial Co., Ltd. MECHATROLINK is a registered trademark of YASKAWA ELECTRIC CORPORATION. SSCNET is a registered trademark of Mitsubishi Electric Corporation. Microsoft, Windows 2000, Windows XP, and Windows XPe are registered trademarks of Microsoft Corporation. Pentium is a registered trademark of Intel Corporation. Atom is a registered trademark of Intel Corporation. VxWorks is a registered trademark of Wind River Systems, Inc., a wholly owned subsidiary of Intel Corporation. All other trademarks are properties of their respective owners.
Revised October 13, 2009 Control the Future
Soft Servo Systems, Inc.
U.S. Office:
Soft Servo Systems, Inc. 39 Whitcomb Street Waltham, MA 02453, USA Phone: 1.781.891.9555 Fax: 1.781.891.3853
http://www.softservo.com Send inquiries to: [email protected]
Japan Offices:
Yokohama Office: Soft Servo Systems, Inc. Yokohama Joint Research Center 2F 1-1-40 Suehiro-cho, Tsurumi-ku, Yokohama 230-0045, Japan Phone: +81-45-500-5266 Fax: +81-45-500-5258
http://www.softservo.co.jp Send inquiries to: [email protected]
Hamamatsu Office: Soft Servo Systems, Inc. 272-1 Norieda-cho, Minami-ku Hamamatsu, Shizuoka 432-8053, Japan Phone: +81-53-444-5771 Fax: +81-53-444-5773