Two types of observations In situ measurement: refers to measurements obtained through direct...
15
Two types of observations measurement: refers to measurements obtained through direct contact with the respective object. ensing measurement: acquisition of information of an ject or phenomenon, by the use of either recording or al-time sensing devices that are wireless, not in physical or timate contact with the object. Active remote sensing Passive remote sensing Mid-term review cy is the difference between what we measured and the true (yet unknown) value. (also called reproducibility or repeatability) describes the o which measurements show the same or similar results. Probability density Reference value Average Measured value Accuracy Precision
-
Upload
spencer-hawkins -
Category
Documents
-
view
218 -
download
1
Transcript of Two types of observations In situ measurement: refers to measurements obtained through direct...

Two types of observations
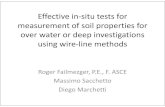
In situ measurement: refers to measurements obtained through direct contact with the respective object. Remote sensing measurement: acquisition of information of an
object or phenomenon, by the use of either recording or real-time sensing devices that are wireless, not in physical or intimate contact with the object.
Active remote sensing Passive remote sensing
Mid-term review
Accuracy is the difference between what we measured and the true (yet unknown) value.
Precision (also called reproducibility or repeatability) describes the degree to which measurements show the same or similar results.
Pro
babi
lity
den
sity
Ref
eren
ce v
alue
Ave
rage
Measured value
Accuracy
Precision

Random error is the variation between measurements, also known as noise.
Unpredictable Zero arithmetic mean
Random error is caused by (a) unpredictable fluctuations of a measurement apparatus, (b) the experimenter's interpretation of the instrumental reading;
Systematic errors are biases in measurement which lead to the situation where the mean of many separate measurements differs from the actual value of the measured attribute.
A common method to remove systematic error is through Calibration of the measurement instrument.
Random error can be reduced or removed by taking many measurements
Expression of Measures: e (unit) ± Δe, e.g.,
ee
%)100(ee
Unit Error:
Percent Error:

Averaging
n
ttx
nnxxx
nx
1)(
1)](...)2()1([(
1
Variance 22 'xx
Standard deviation 2'xx
Simple statistics
n
iiyix
nyx
1)(')('
1covariance
yx
)yx(xy Correlation coefficient

Sensible heat flux 22 mW
smJ:unit
Specific heat at constant pressure KkgJ
p 1004C
K ,shsm
CSH
kgKJ
3m
kgs2m
J
p
Kinematic sensible heat flux, sh
flux ,Tu ,Tv ,Tw
Sensible heat flux, SH TuC ,TvC ,TwC ppp
z
T
0T
0w
0T
0w
0Twflux
z
T
0T
0w
0T
0w
0Twflux
daytime nighttime
11
22

Estimating Errors of derived variables/Propagation of Errors
Consider a quantity CAB
X where A, B, C are measured quantities,
The error associated with each of them is CBA &,,
.
What is the error of the derived variable X?
CBACAB
X lnlnlnlnln
)ln()ln(lnln CdBdAdXd
CC
BB
AA
XX
CC
BB
AA
XX
Max error:

Significant figures
1. All non-zero digits are significant.2. In a number without a decimal point, only zeros BETWEEN non-
zero digits are significant (unless a bar indicates the last significant digit--see below).
3. In a number with a decimal point, all zeros to the right of the first non-zero digit are significant. A decimal point may be placed after the number; for example "100." indicates specifically that three significant figures are meant
For multiplication and division, the result should have as many significant figures as the measured number with the smallest number of significant figures.
For addition and subtraction, the result should have as many decimal places as the measured number with the smallest number of decimal places.
Rule of arithmetic computation

1. 37.76 + 3.907 + 226.4 = 268.1 2. 319.15 - 32.614 = 286.54 3. 104.630 + 27.08362 + 0.61 = 132.32 4. 125. - 0.23 + 4.109 = 129. 5. 2.02 x 2.5 = 5.0 6. 600.0 / 5.2302 = 114.7 7. 0.0032 x 273 = 0.87 8. (5.5)3 = 1.7 x 102
9. 0.556 x (4.x101 - 32.5) = 4.10. 45. x 3.00 = 1.4 x 102
11. 3.00 x 105 - 1.5 x 102 = 3.0 x 105 12. What is the average of 0.1707, 0.1713, 0.1720, 0.1704, and 0.1715?Answer = 0.1712

Temperature scales
FTT oCF oo 32
59 15.273 Ck oTTbaTT CF oo
Thermometer Calibrations
Three reference points Ice Triple Point
Steam
Kelvin 273.15 273.16 373.15
Celsius 0.00 0.01 100.00
baxT
1. Liquid in glass thermometer
VV Volume expansion of glass:1.2-2.7x10-5 per 1.00oC,
Volume expansion of Hg:18x10-5 per 1.00oC
2. Maximum thermometer
3. Minimum thermometer

Making temperature measurements in the air1. Air is a poor conductor, thus, a good flow over the sensor should be maintained.
2. Sensor to be thermally insulated from the mounting.
3. To prevent radiation, sensors can be polished or coated to reflect solar radiation and to reduce the absorption of infrared radiation. A shield can also be used to shelter the sensor, but it needs to be aspirated to ensure proper ventilation.
4. Heating by adiabatic compression may occur when a sensor is exposed to air moving at very high rates, e.g., aircraft measurements. Adiabatic heating needs to be corrected.
5. Wetting of a temperature sensor will lower the measured temperature due to evaporative cooling. Upper air measurements can be affected as a sensor goes though a cloud. A special device is needed to prevent sensor wetting. For surface measurements, the radiation shield should keep the sensor dry.
Thermometer Response Time
inversely proportional to heat transfer rate. proportional to the heat capacity

Moisture Measurement
TRe vv 2vTR
E LTE
K 16.273T ,kg J X105.2L hPa, 11.6E
),TT
T-T
RL
exp(EE
01-6
0
0
0
v0
Mixing ratio, r 622.0R
R ,
pe
e-pe
r v
dMM
d
v
Specific humidity, q pe
)e-(1-pe
qvd
v
MMM
Relative humidity, h %qq
rr
Ee
hss
Dew-point

For isobaric process QTC p
Enthalpy pVUTCH p
Wet bulb temperature
)( wv
pTofs TT
crr
w
)(622.0 w
v
pTofs TT
pcee
w
Since )( Ds tee )( ws Tee
TTT wD
)()( rrTTc wvwp
wT
T
Sling psychrometer
Theory
How to operate sling psychrometer

Atmospheric pressure measurement
Barometers
Mercury barometer zzHg hgP ,,
Temperature correction
Gravity correctionFortin Barometer
Aneroid Barometer
BarographsA barograph, which records a graph of some atmospheric pressure, uses an aneroid barometer mechanism to move a needle on a smoked foil or to move a pen upon paper, both of which are attached to a drum moved by clockwork.
An evacuated medal capsule supported by a spring. The expansion and contraction drives mechanical levers such that the tiny movements of the capsule are amplified and Displayed.

Precipitation
Precipitation refers to any product of the condensation of atmospheric water vapour that is deposited on the Earth's surface.
Precipitation rate (R): rain water falling on ground per unit area per unit time
sm
kg2
w
R s
m
Mass flux
hmm
sm 6106.31

Ordinary rain gauge
Tipping bucket rain gauge
Optical rain gauge (ORG)
Disdrometer
Precipitation radar
Relationship between the intensity echo and precipitation
6.1200RZ
Echo strength is measured in units of DBZ (decibels).
)(log10 10 ZdBZ
Measuring the drop size distribution and velocity of falling droplets.
)()( 36 iiil DVDDNR

dBZRainrate
(inches per hour)Description
65 16+ Extreme thunderstorms, possible hail
60 8.00Very heavy thunderstorms, possible
hail55 4.00 Heavy thunderstorms52 2.50 Thunderstorms47 1.25 Very heavy rain or sleet41 0.50 Heavy rain or sleet36 0.25 Moderate rain or sleet30 0.10 Light rain or moderate snow20 Trace Very light rain or snow