Tugino ST MT [email protected]/files/2012/07/7-Kontrol-Robot.pdfsensor)...
30
1 Tugino ST MT [email protected] Jurusan Teknik Elektro STTNAS Yogyakarta Robot Control Control Methods Conventional Joint PID Control Widely used in industry Advanced Control Approaches Computed torque approach Nonlinear feedback Ad ti t l Tugino, ST MT STTNAS Yogyakarta 2 Adaptive control Variable structure control ….
Transcript of Tugino ST MT [email protected]/files/2012/07/7-Kontrol-Robot.pdfsensor)...

1
Tugino ST [email protected]
Jurusan Teknik ElektroSTTNAS Yogyakarta
Robot Control
Control MethodsConventional Joint PID Control
Widely used in industryAdvanced Control Approaches
Computed torque approachNonlinear feedback Ad ti t l
Tugino, ST MT STTNAS Yogyakarta 2
Adaptive controlVariable structure control….
2
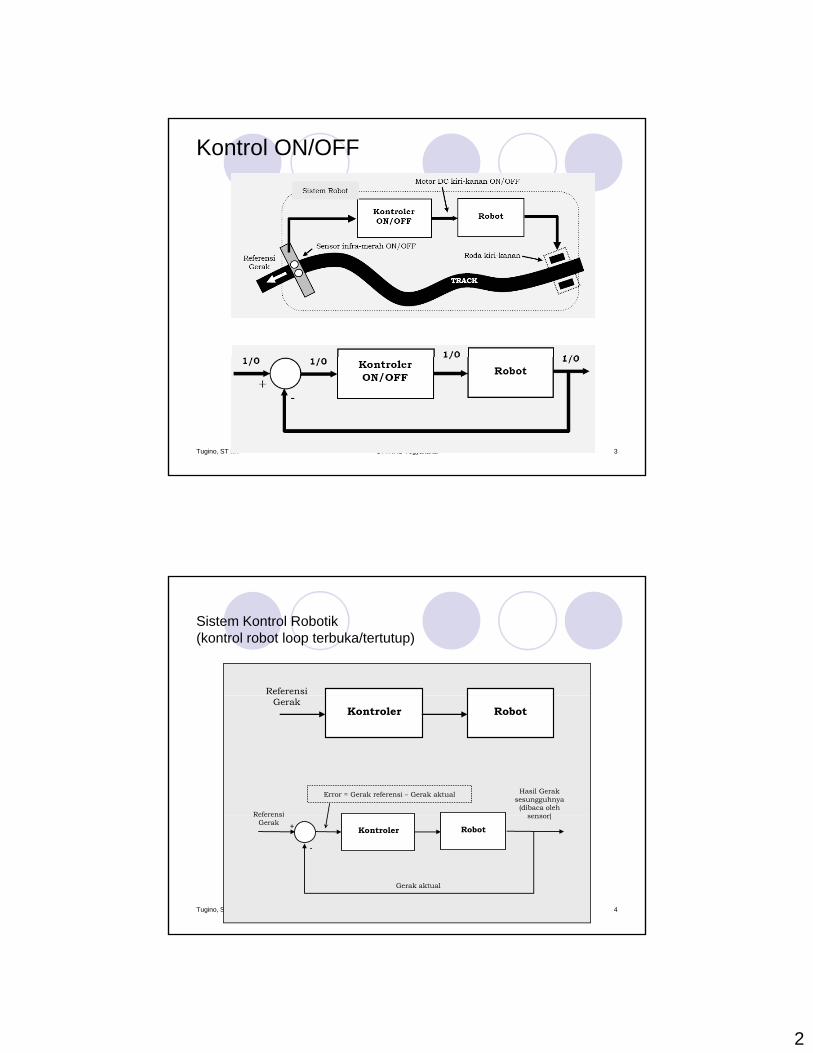
Kontrol ON/OFF
Tugino, ST MT STTNAS Yogyakarta 3
Sistem Kontrol Robotik(kontrol robot loop terbuka/tertutup)
Referensi Kontroler Robot
Gerak
Referensi
Hasil Gerak sesungguhnya (dibaca oleh
sensor)
Error = Gerak referensi – Gerak aktual
Tugino, ST MT STTNAS Yogyakarta 4
Robot
Referensi Gerak
Kontroler
sensor)
Gerak aktual
+
-
3
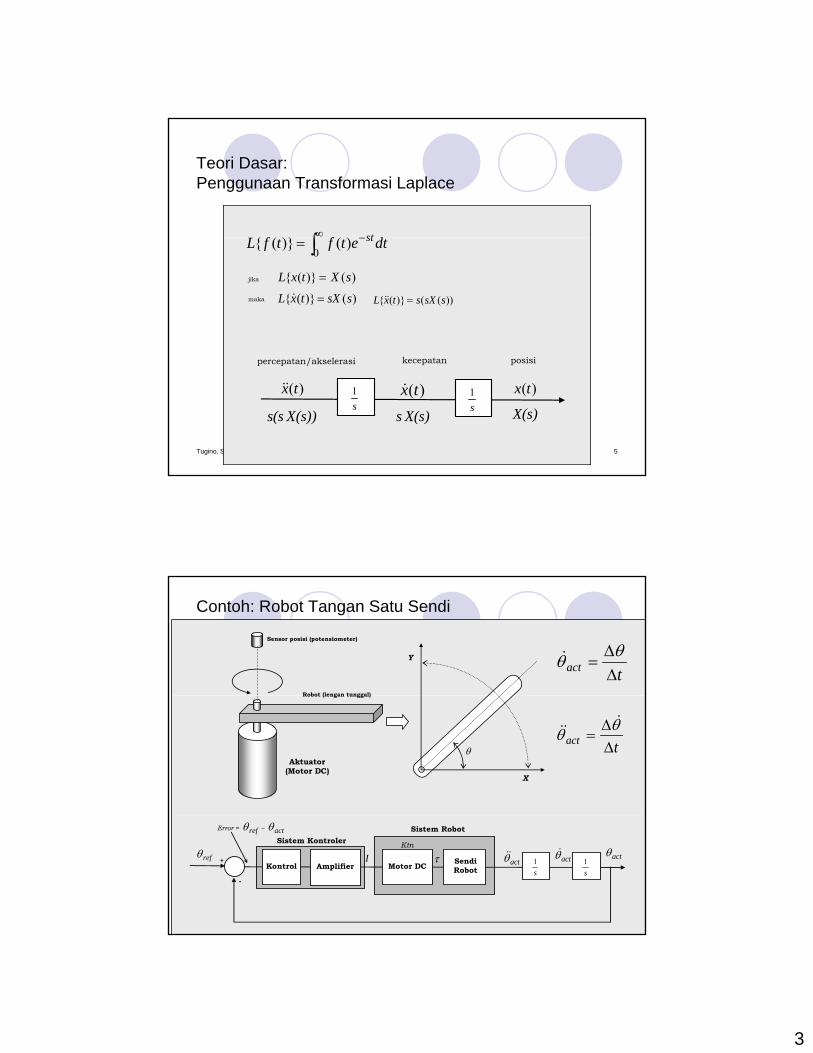
Teori Dasar:Penggunaan Transformasi Laplace
∫∞
)()}({ dff st∫ −=0
)()}({ dtetftfL st
jika )()}({ sXtxL =maka )()}({ ssXtxL =& ))(()}({ ssXstxL =&&
k i i
Tugino, ST MT STTNAS Yogyakarta 5
percepatan/akselerasi
s1
s1
kecepatan posisi
)(tx&& )(tx& )(tx
s(s X(s)) s X(s) X(s)
Contoh: Robot Tangan Satu Sendi
Robot (lengan tunggal)
Sensor posisi (potensiometer)
Y
tact ΔΔ
=θθ&
Robot (lengan tunggal)
Aktuator (Motor DC)
θ
X
tact ΔΔ
=θθ&
&&
Tugino, ST MT STTNAS Yogyakarta 6
+
-
Error = refθ – actθ
Amplifier s1
s1 Sendi
Robot Motor DC actθ&& actθ& actθrefθ
Sistem Robot
τIKtn
Kontrol
Sistem Kontroler
4
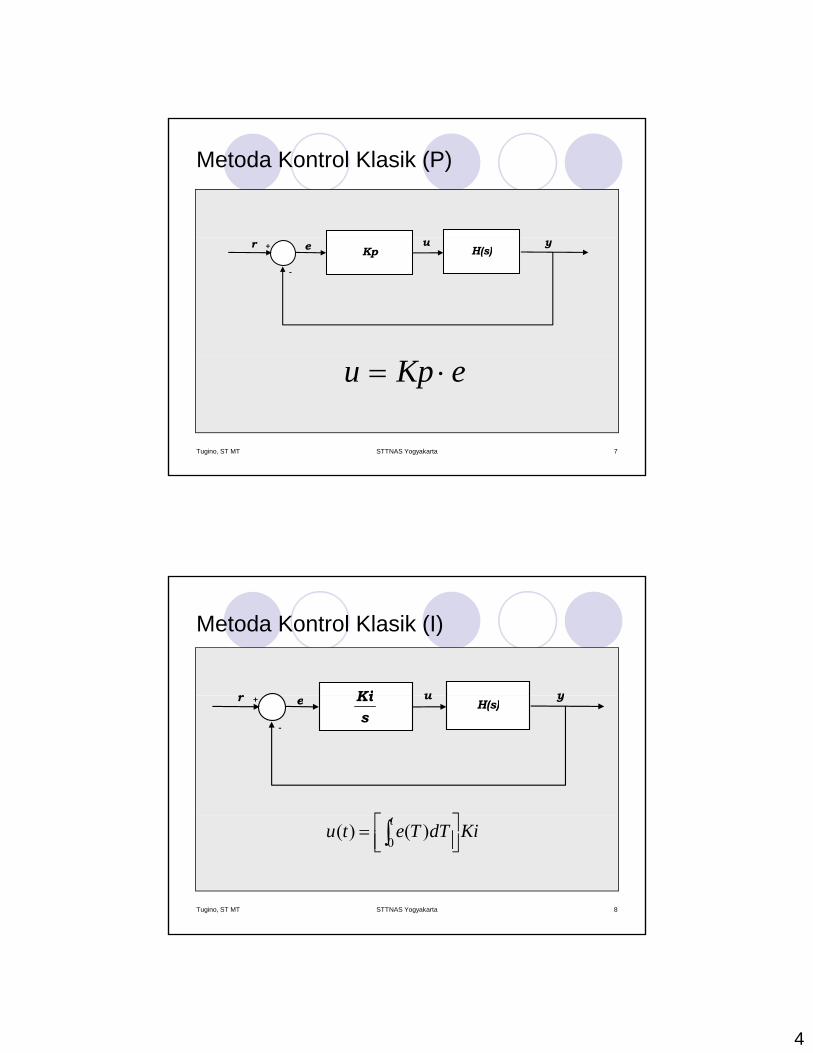
Metoda Kontrol Klasik (P)
H(s) r Kp y +
-
e u
Tugino, ST MT STTNAS Yogyakarta 7
eKpu ⋅=
Metoda Kontrol Klasik (I)
r Ki y
u H(s) r
sKi
y +
-
e u
⎤⎡
Tugino, ST MT STTNAS Yogyakarta 8
KidTTetut
⎥⎦⎤
⎢⎣⎡= ∫0 )()(

5
Metoda Kontrol Klasik (P-I)
Kp
H(s) r
sKi
y +
-
e u
Kp +
+
Tugino, ST MT STTNAS Yogyakarta 9
sKiKpsG +=)(
Metoda Kontrol Klasik (D)
r y
u
H(s) r Kds ⋅
y +
-
e u
Δ
Tugino, ST MT STTNAS Yogyakarta 10
eKdu &⋅=teKdu
ΔΔ⋅=
6
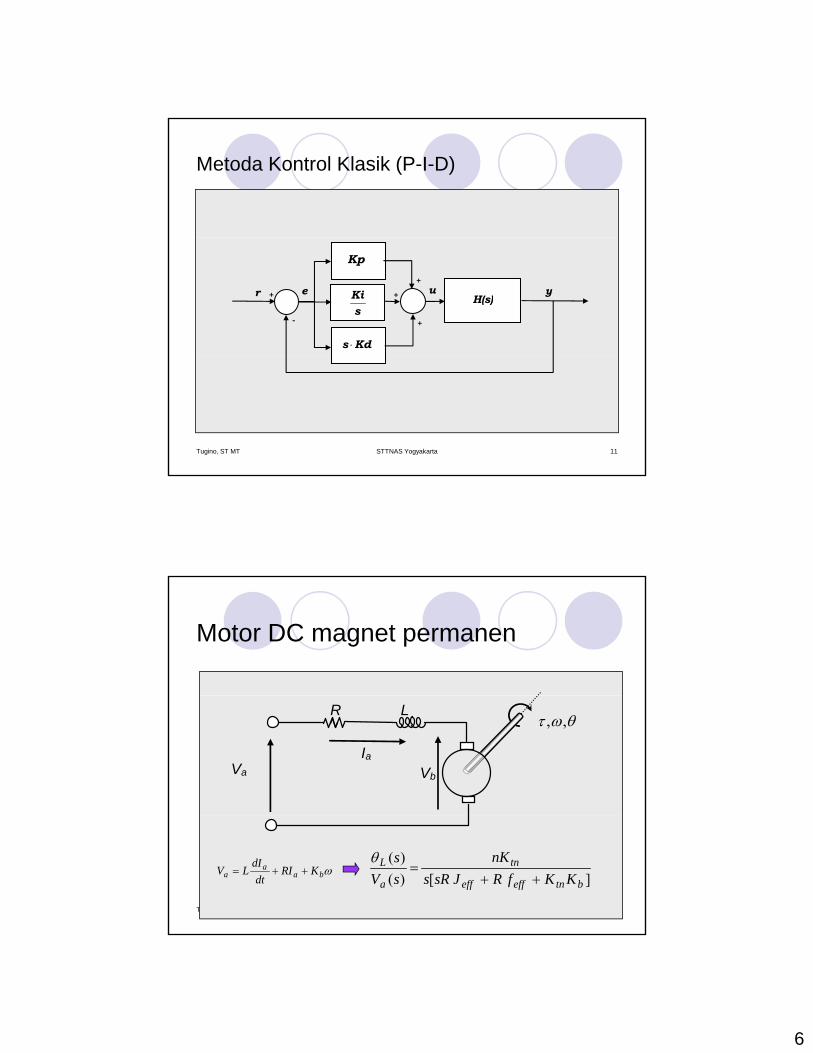
Metoda Kontrol Klasik (P-I-D)
H(s) r
Kds ⋅
y +
-
e u +
+
Kp
sKi +
Tugino, ST MT STTNAS Yogyakarta 11
Motor DC magnet permanen
R L
Va Ia
Vb
θωτ ,,
Tugino, ST MT STTNAS Yogyakarta 12
ωbaa
a KRIdt
dILV ++= ] [)(
)(
btneffeff
tn
a
LKKfRJsRs
nKsVs
++=
θ
7
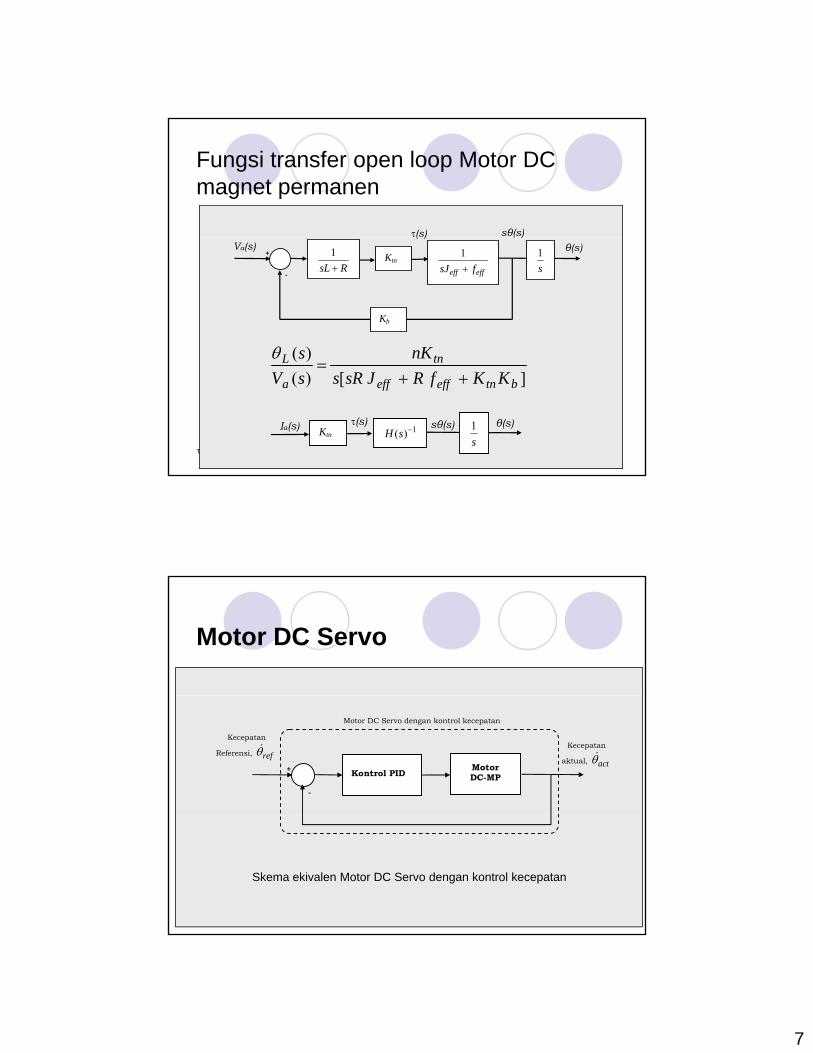
Fungsi transfer open loop Motor DC magnet permanen
sθ(s) (s) Va(s)
+
- RsL +
1
effeff fsJ +1Ktn
s1
Kb
θ(s) ( )( )
)( tL nKsθ
Tugino, ST MT STTNAS Yogyakarta 13
] [)()(
btneffeff
tn
a
LKKfRJsRs
nKsVs
++=
θ
Ia(s) 1)( −sHKtn
s1 θ(s) sθ(s) (s)
Motor DC Servo
Motor DC-MP
Kecepatan
Referensi, refθ&
Kontrol PID +
-
Kecepatan
aktual, actθ&
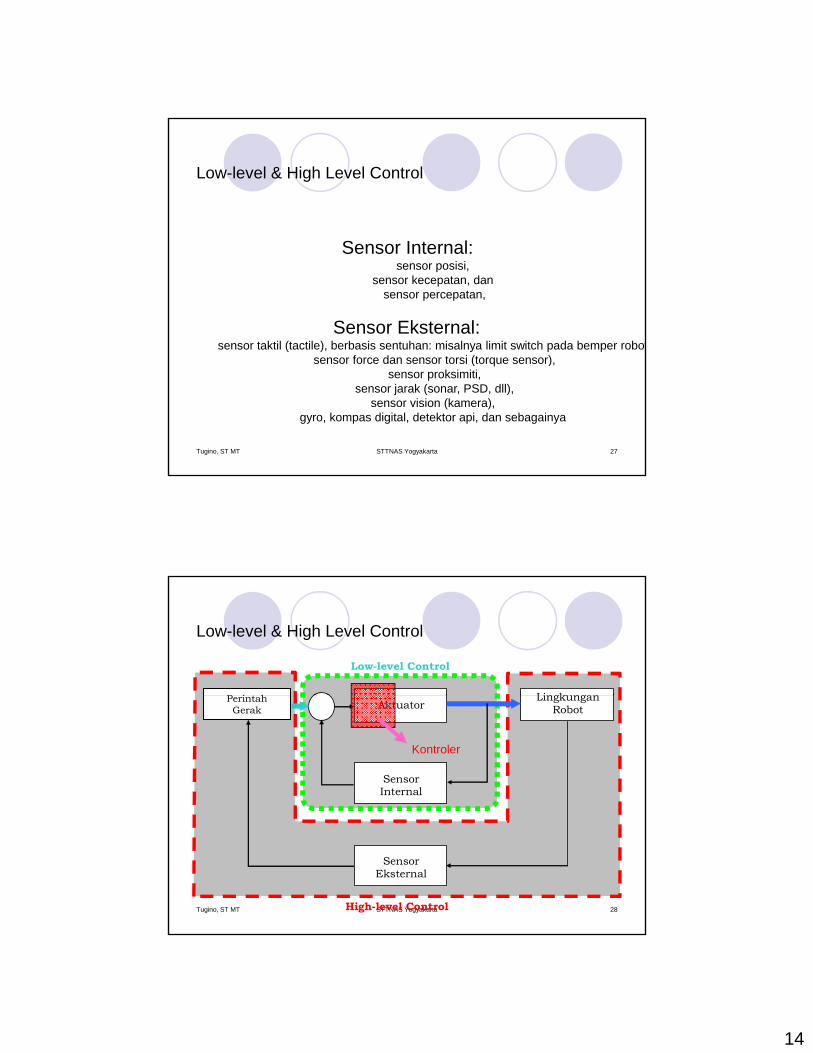
Motor DC Servo dengan kontrol kecepatan
Tugino, ST MT STTNAS Yogyakarta 14
Skema ekivalen Motor DC Servo dengan kontrol kecepatan
8
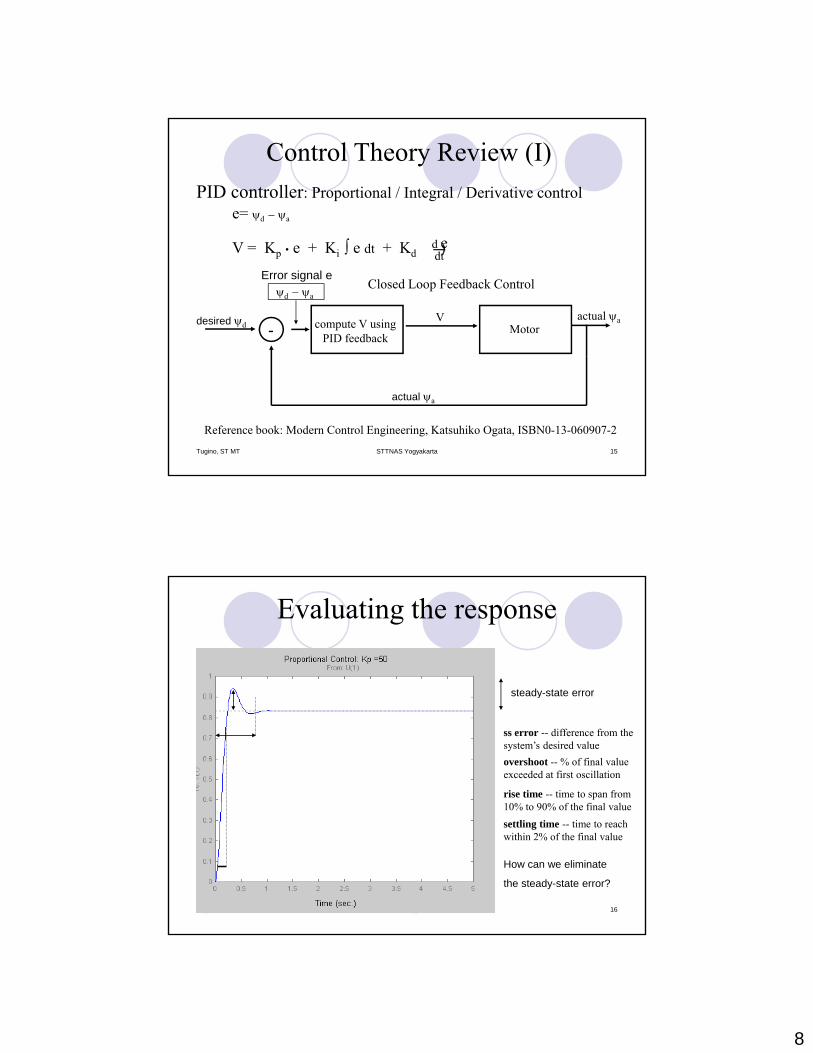
Control Theory Review (I)PID controller: Proportional / Integral / Derivative control
e= ψd − ψa
actual ψadesired ψd V
Motor- compute V using PID feedback
ψd − ψa
Error signal e
V = Kp • e + Ki ∫ e dt + Kd )d edt
Closed Loop Feedback Control
Tugino, ST MT STTNAS Yogyakarta 15
actual ψa
Reference book: Modern Control Engineering, Katsuhiko Ogata, ISBN0-13-060907-2
Evaluating the response
steady-state errorovershoot steady state error
settling time
overshoot -- % of final value exceeded at first oscillation
rise time -- time to span from 10% to 90% of the final value
ss error -- difference from the system’s desired value
Tugino, ST MT STTNAS Yogyakarta 16
How can we eliminate
the steady-state error?rise time
settling time -- time to reach within 2% of the final value
9
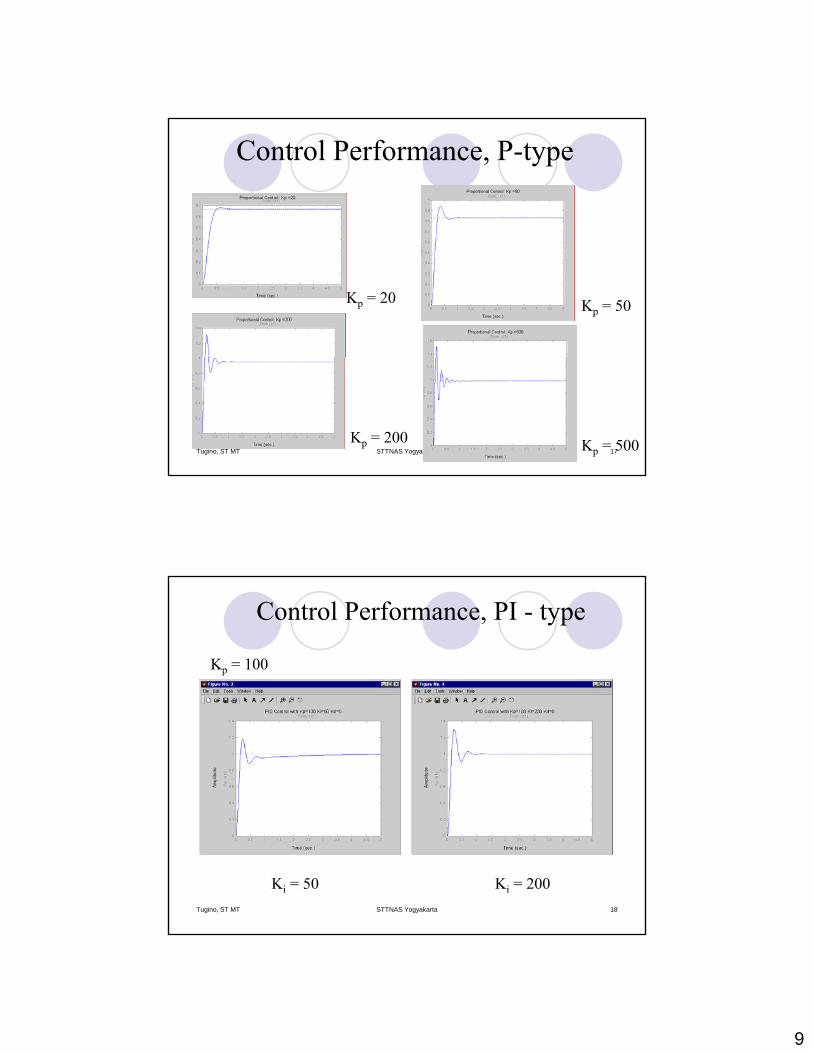
Control Performance, P-type
Kp = 20 Kp = 50
Tugino, ST MT STTNAS Yogyakarta 17Kp = 200 Kp = 500
Control Performance, PI - type
Kp = 100
Tugino, ST MT STTNAS Yogyakarta 18
Ki = 50 Ki = 200
10
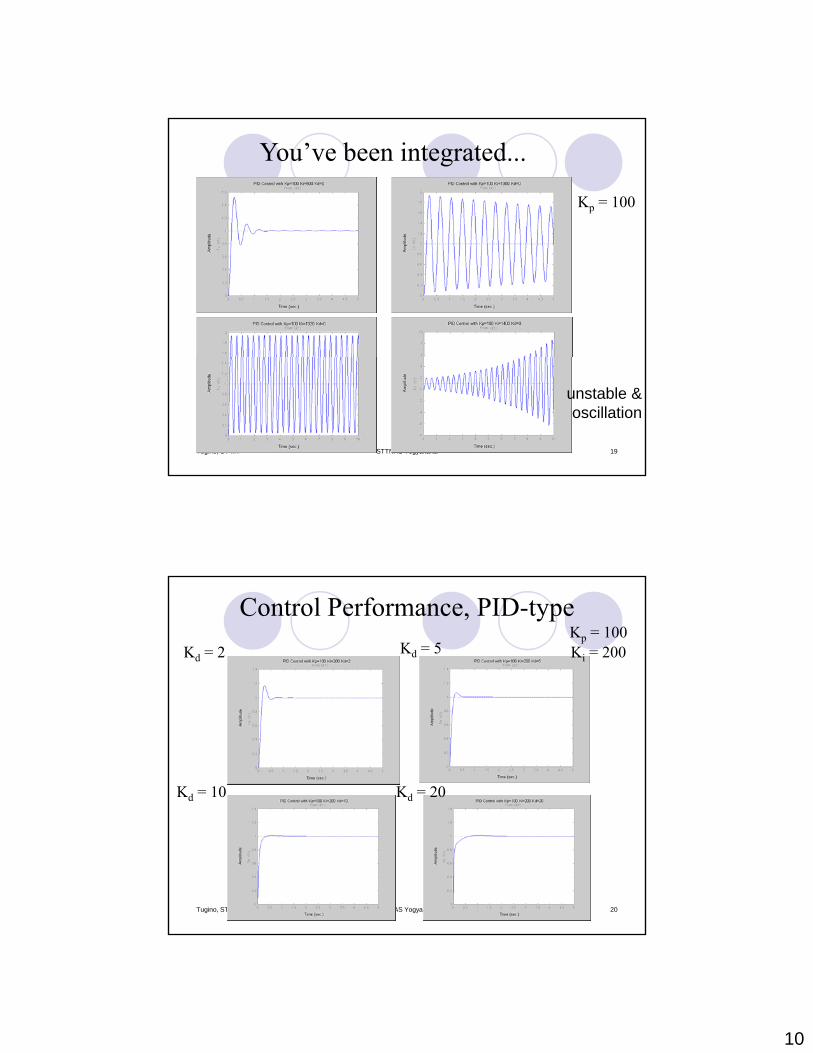
You’ve been integrated...
Kp = 100
Tugino, ST MT STTNAS Yogyakarta 19
unstable & oscillation
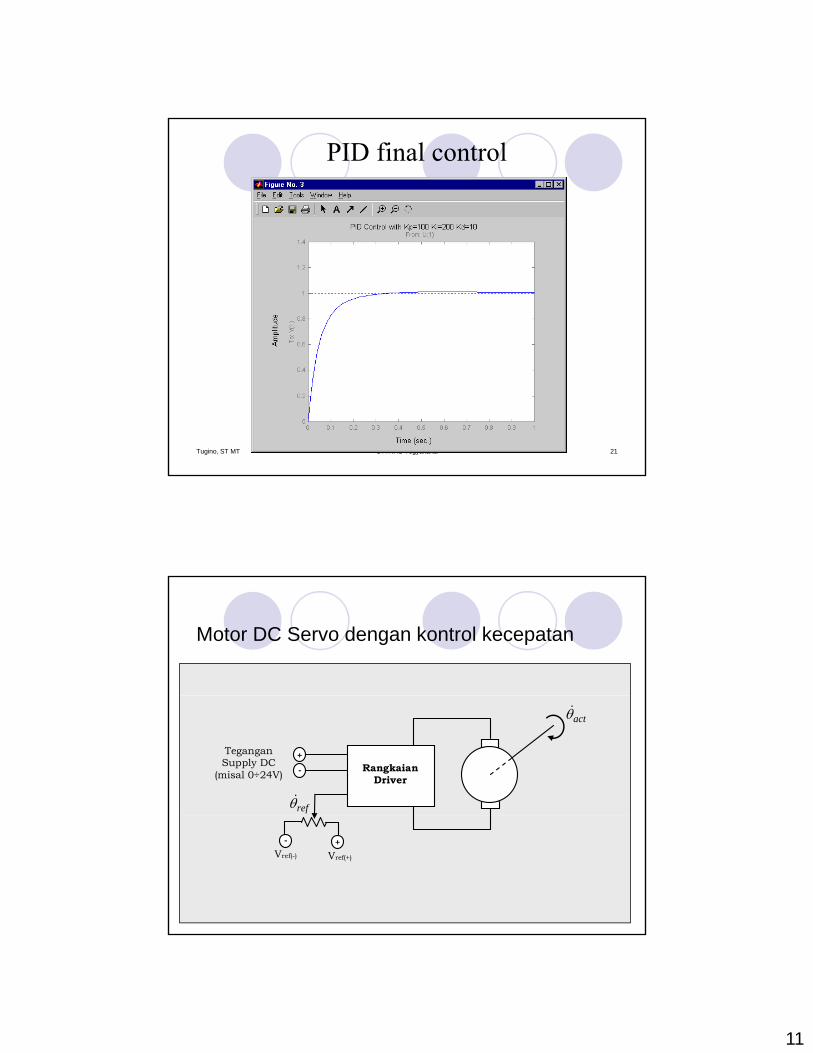
Control Performance, PID-typeKp = 100 Ki = 200 Kd = 2 Kd = 5
Kd = 10 Kd = 20
Tugino, ST MT STTNAS Yogyakarta 20
11
PID final control
Tugino, ST MT STTNAS Yogyakarta 21
Motor DC Servo dengan kontrol kecepatan
Tegangan Supply DC
(misal 0÷24V)
refθ&
Rangkaian Driver
actθ&
+ -
Tugino, ST MT STTNAS Yogyakarta 22
+ -
Vref(+) Vref(-)

12
RC Servo
Arah piringan 120º s/d +120º 0º Sinyal Tegangan Input PWM piringan
Servo -120 s/d +120 0 Sinyal Tegangan Input PWM
Tugino, ST MT STTNAS Yogyakarta 23
RC Servo
Prinsip kerja RC Servo
Teknik Pulse Width Modulation
Tegangan PWM Tegangan ekivalen linier V V
=
=
0V
Vsat
Tugino, ST MT STTNAS Yogyakarta 24
t t
=
Prinsip kerja PWM

13
Sebuah rangkaian pembangkit PWM lengkap dengan driver H-bridge untuk motor DC-MP/DC-SV
1K2
+
-+
-
74HCT245¼ LM324
¼ LM324 +12V +12V
1K2 1K2 BD643 BD643+(12÷24)V
+5V
74HCT245
Gnd Trg Dis
Vcc 20K
+ +
+
-
+
- + -
74HCT24574HCT04
¼ LM324
¼ LM324 ¼ LM324
¼ LM324
+12V
+12V +12V
1K2
1K2 1K2
2K2
2SD1314
BD643
BD643 BD643
BD643
2SD1314
2SD1314
2SD1314 2SD1314
1K2
LM555
M
1K2+12V
20K
CW/CCW
1
2
8
7
1/0
H-bridge
74HCT04
Tugino, ST MT STTNAS Yogyakarta 25
.01
Trg Out Rst Ctl
Thr Dis 20K
.01
(0÷5)V refθ&
3
4
6
5
M
Arah (1/0)
Kecepatan (0÷5)V
Driver Motor DCBerbasis
PWM (ep)
Low-level & High Level Control
P i h Lingkungan
Low-level Control
Endra Pitowarno © 2007
Perintah Gerak Aktuator
Lingkungan Robot
Sensor Internal
Tugino, ST MT STTNAS Yogyakarta 26
Sensor Eksternal
High-level Control
14
Low-level & High Level Control
Sensor Internal:sensor posisi,
sensor kecepatan, dan sensor percepatan,
Sensor Eksternal: sensor taktil (tactile), berbasis sentuhan: misalnya limit switch pada bemper robot
f d t i (t )
Tugino, ST MT STTNAS Yogyakarta 27
sensor force dan sensor torsi (torque sensor),sensor proksimiti,
sensor jarak (sonar, PSD, dll),sensor vision (kamera),
gyro, kompas digital, detektor api, dan sebagainya.
Low-level & High Level Control
P i h Lingkungan
Low-level Control
Perintah Gerak Aktuator
Lingkungan Robot
Sensor Internal
Kontroler
Tugino, ST MT STTNAS Yogyakarta 28
Sensor Eksternal
High-level Control
15
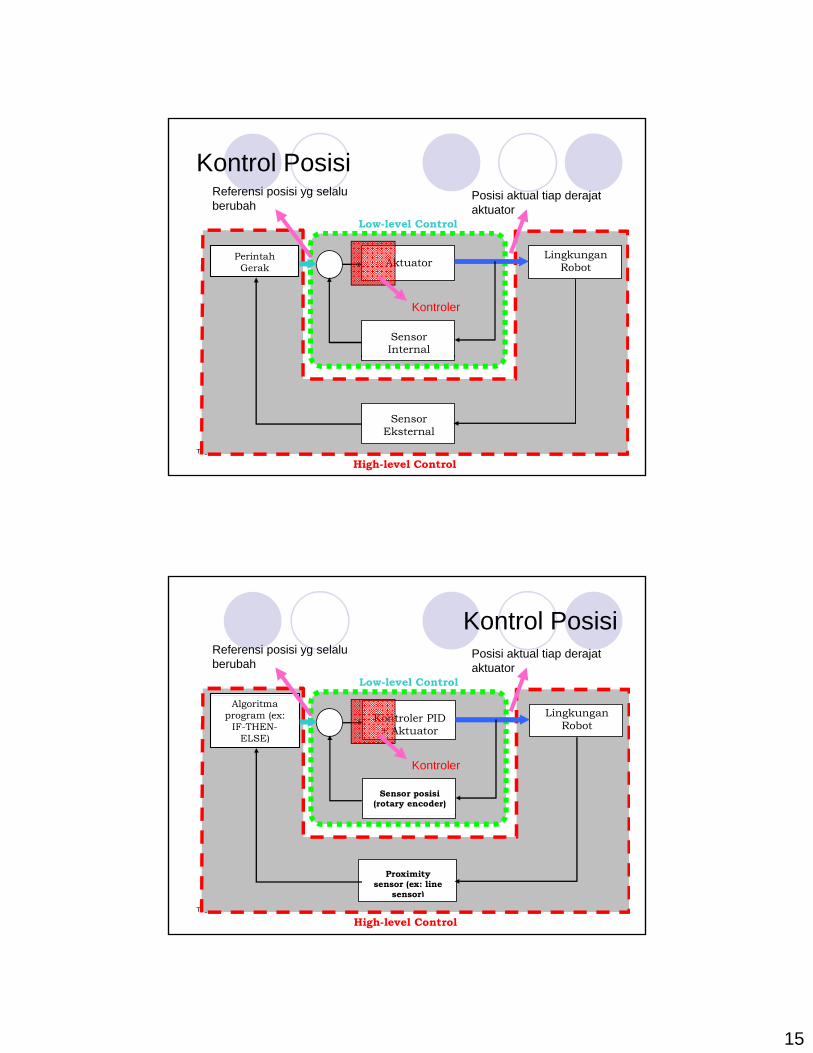
Low-level Control
Kontrol PosisiReferensi posisi yg selalu berubah
Posisi aktual tiap derajat aktuator
Perintah Gerak Aktuator
Lingkungan Robot
Sensor Internal
Kontroler
Tugino, ST MT STTNAS Yogyakarta 29
Sensor Eksternal
High-level Control
Low-level Control
Kontrol PosisiReferensi posisi yg selalu berubah
Posisi aktual tiap derajat aktuator
Algoritma program (ex:
IF-THEN-ELSE)
Kontroler PID + Aktuator
Lingkungan Robot
Sensor posisi (rotary encoder)
Kontroler
Tugino, ST MT STTNAS Yogyakarta 30
Proximity sensor (ex: line
sensor)
High-level Control
16
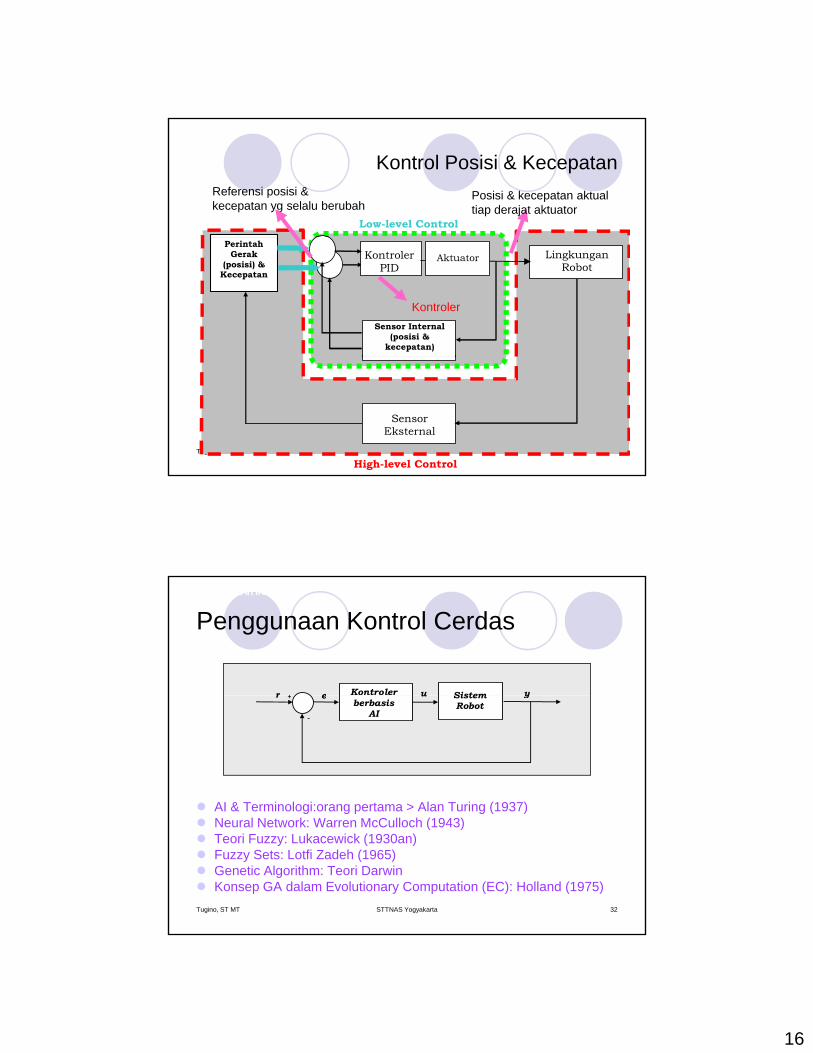
Low-level Control
Kontrol Posisi & KecepatanReferensi posisi & kecepatan yg selalu berubah
Posisi & kecepatan aktual tiap derajat aktuator
Perintah Gerak
(posisi) & Kecepatan
Lingkungan Robot
Sensor Internal (posisi &
kecepatan)
Kontroler PID
Aktuator
Kontroler
Tugino, ST MT STTNAS Yogyakarta 31
Sensor Eksternal
High-level Control
Penggunaan Kontrol Cerdas
Sistem r Kontroler y +
e u
Endra Pitowarno © 2007
Sistem Robot
r berbasis
AI
y +
-
e u
AI & Terminologi:orang pertama > Alan Turing (1937)
Tugino, ST MT STTNAS Yogyakarta 32
Neural Network: Warren McCulloch (1943)Teori Fuzzy: Lukacewick (1930an)Fuzzy Sets: Lotfi Zadeh (1965)Genetic Algorithm: Teori DarwinKonsep GA dalam Evolutionary Computation (EC): Holland (1975)
17
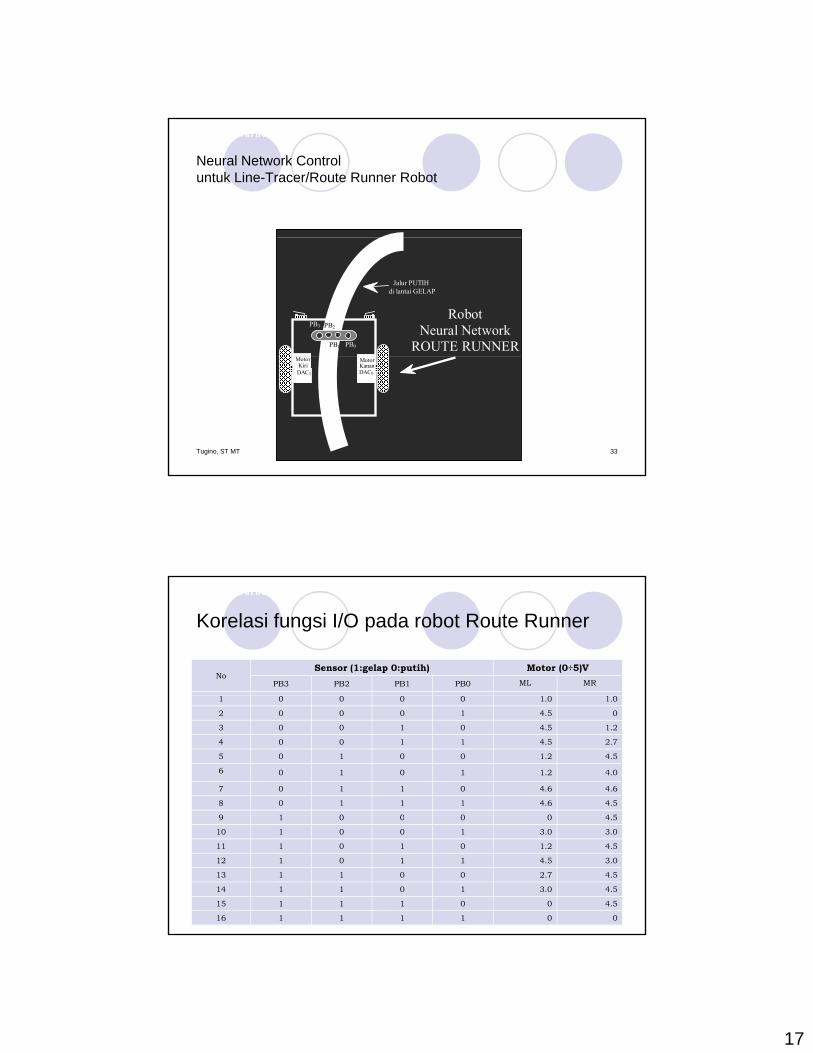
Neural Network Controluntuk Line-Tracer/Route Runner Robot
Endra Pitowarno © 2007
PB0
Jalur PUTIH di lantai GELAP
Robot Neural Network
ROUTE RUNNERPB1
PB2PB3
Tugino, ST MT STTNAS Yogyakarta 33
Motor Kanan
Motor Kiri DAC1 DAC0
Korelasi fungsi I/O pada robot Route Runner
NoSensor (1:gelap 0:putih) Motor (0÷5)V
PB3 PB2 PB1 PB0 ML MR
Endra Pitowarno © 2007
1 0 0 0 0 1.0 1.0
2 0 0 0 1 4.5 0
3 0 0 1 0 4.5 1.2
4 0 0 1 1 4.5 2.7
5 0 1 0 0 1.2 4.5
6 0 1 0 1 1.2 4.0
7 0 1 1 0 4.6 4.6
8 0 1 1 1 4.6 4.5
9 1 0 0 0 0 4 5
Tugino, ST MT STTNAS Yogyakarta 34
9 1 0 0 0 0 4.5
10 1 0 0 1 3.0 3.0
11 1 0 1 0 1.2 4.5
12 1 0 1 1 4.5 3.0
13 1 1 0 0 2.7 4.5
14 1 1 0 1 3.0 4.5
15 1 1 1 0 0 4.5
16 1 1 1 1 0 0
18
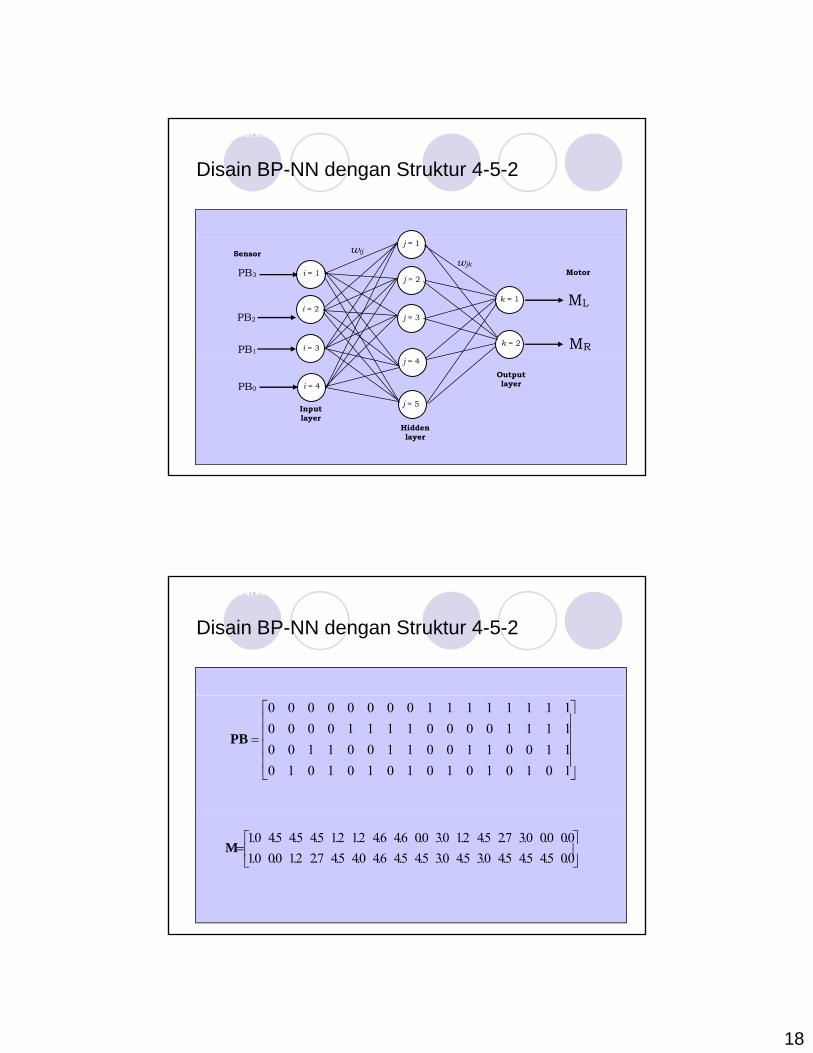
Disain BP-NN dengan Struktur 4-5-2
Endra Pitowarno © 2007
i = 3
i = 1
i = 2
j = 1
j = 2
j = 3
k = 1
k = 2
PB1
PB3
PB2 ML
wij wjk
MR
Sensor
Motor
Tugino, ST MT STTNAS Yogyakarta 35
Hidden layer
Output layer
Input layer
i = 4
j = 4
PB0 j = 5
Disain BP-NN dengan Struktur 4-5-2
Endra Pitowarno © 2007
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1010101010101010110011001100110011110000111100001111111100000000
PB
Tugino, ST MT STTNAS Yogyakarta 36
⎥⎦
⎤⎢⎣
⎡=
0.05.45.45.40.35.40.35.45.46.40.45.47.22.10.00.10.00.00.37.25.42.10.30.06.46.42.12.15.45.45.40.1
M
19
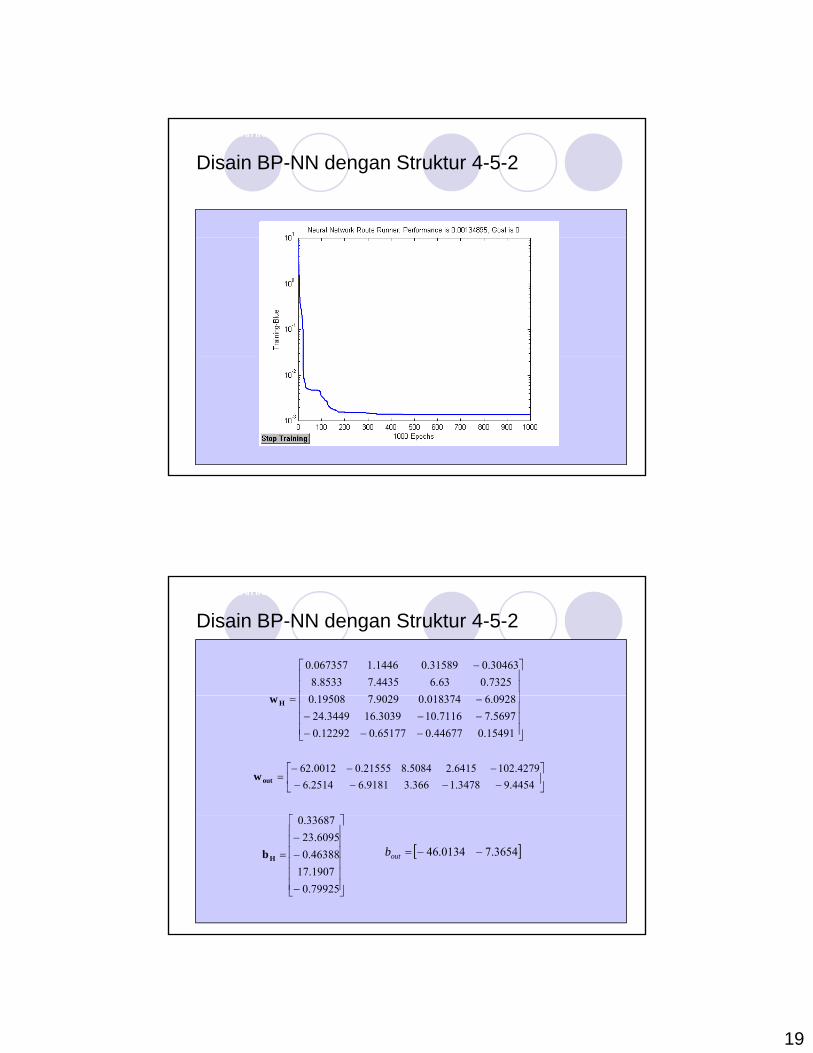
Disain BP-NN dengan Struktur 4-5-2Endra Pitowarno © 2007
Tugino, ST MT STTNAS Yogyakarta 37
Disain BP-NN dengan Struktur 4-5-2
⎥⎥⎥⎤
⎢⎢⎢⎡ −
092860183740902971950807325.063.64435.78533.830463.031589.01446.1067357.0
Endra Pitowarno © 2007
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣ −−−−−−−=
15491.044677.065177.012292.05697.77116.103039.163449.240928.6018374.09029.719508.0Hw
⎥⎦
⎤⎢⎣
⎡−−−−−−−
=4454.93478.1366.39181.62514.64279.1026415.25084.821555.00012.62
outw
⎤⎡
Tugino, ST MT STTNAS Yogyakarta 38
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
79925.01907.1746388.0
6095.2333687.0
Hb [ ]3654.70134.46 −−=outb
20
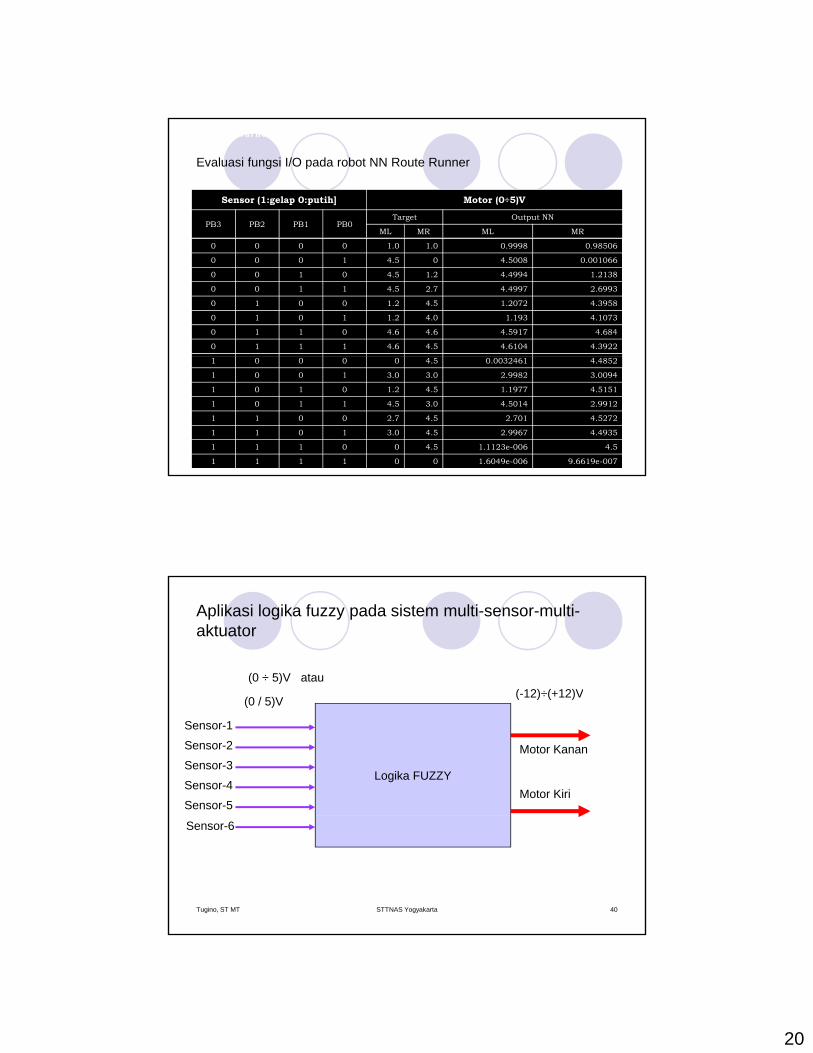
Evaluasi fungsi I/O pada robot NN Route Runner
Sensor (1:gelap 0:putih] Motor (0÷5)V
PB3 PB2 PB1 PB0Target Output NN
ML MR ML MR
Endra Pitowarno © 2007
0 0 0 0 1.0 1.0 0.9998 0.98506
0 0 0 1 4.5 0 4.5008 0.001066
0 0 1 0 4.5 1.2 4.4994 1.2138
0 0 1 1 4.5 2.7 4.4997 2.6993
0 1 0 0 1.2 4.5 1.2072 4.3958
0 1 0 1 1.2 4.0 1.193 4.1073
0 1 1 0 4.6 4.6 4.5917 4.684
0 1 1 1 4.6 4.5 4.6104 4.3922
Tugino, ST MT STTNAS Yogyakarta 39
1 0 0 0 0 4.5 0.0032461 4.4852
1 0 0 1 3.0 3.0 2.9982 3.0094
1 0 1 0 1.2 4.5 1.1977 4.5151
1 0 1 1 4.5 3.0 4.5014 2.9912
1 1 0 0 2.7 4.5 2.701 4.5272
1 1 0 1 3.0 4.5 2.9967 4.4935
1 1 1 0 0 4.5 1.1123e-006 4.5
1 1 1 1 0 0 1.6049e-006 9.6619e-007
Aplikasi logika fuzzy pada sistem multi-sensor-multi-aktuator
(-12)÷(+12)V(0 ÷ 5)V atau
Logika FUZZY
Sensor-1Sensor-2Sensor-3Sensor-4Sensor-5
( 12)÷(+12)V(0 / 5)V
Motor Kanan
Motor Kiri
Tugino, ST MT STTNAS Yogyakarta 40
Sensor-6
21
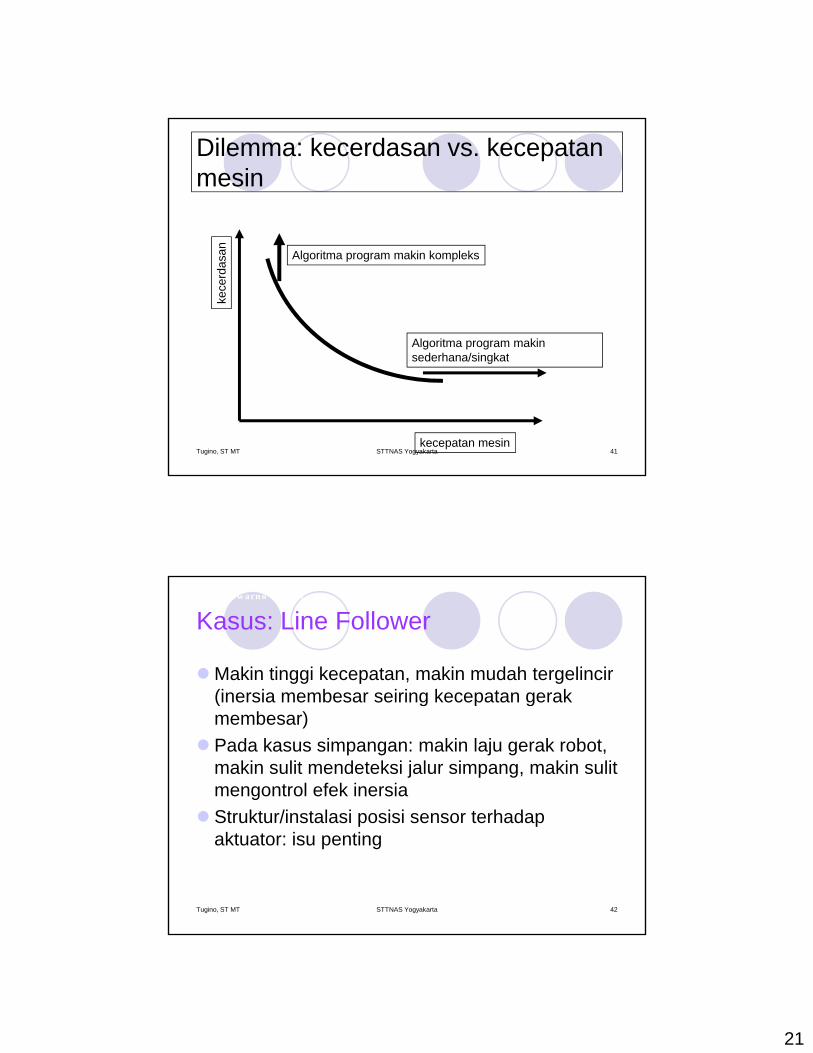
Dilemma: kecerdasan vs. kecepatan mesin
kece
rdas
an Algoritma program makin kompleks
Algoritma program makin sederhana/singkat
Tugino, ST MT STTNAS Yogyakarta 41kecepatan mesin
sederhana/singkat
Kasus: Line Follower
Makin tinggi kecepatan, makin mudah tergelincir (inersia membesar seiring kecepatan gerak
Endra Pitowarno © 2007
(inersia membesar seiring kecepatan gerak membesar)Pada kasus simpangan: makin laju gerak robot, makin sulit mendeteksi jalur simpang, makin sulit mengontrol efek inersiaStruktur/instalasi posisi sensor terhadap
Tugino, ST MT STTNAS Yogyakarta 42
Struktur/instalasi posisi sensor terhadap aktuator: isu penting
22
Kasus: Mata Kamera
Makin tinggi kecepatan, makin rendah kualitas citra yg ditangkap (dynamic noise) >> informasi
Endra Pitowarno © 2007
citra yg ditangkap (dynamic noise) >> informasi posisi tidak akuratDilemma: makin tinggi resolusi citra, makin lambat proses identifikasinya. Makin rendah resolusinya, makin tidak akurat hasil identifikasinya
Tugino, ST MT STTNAS Yogyakarta 43
identifikasinya.Isu penting: high speed camera
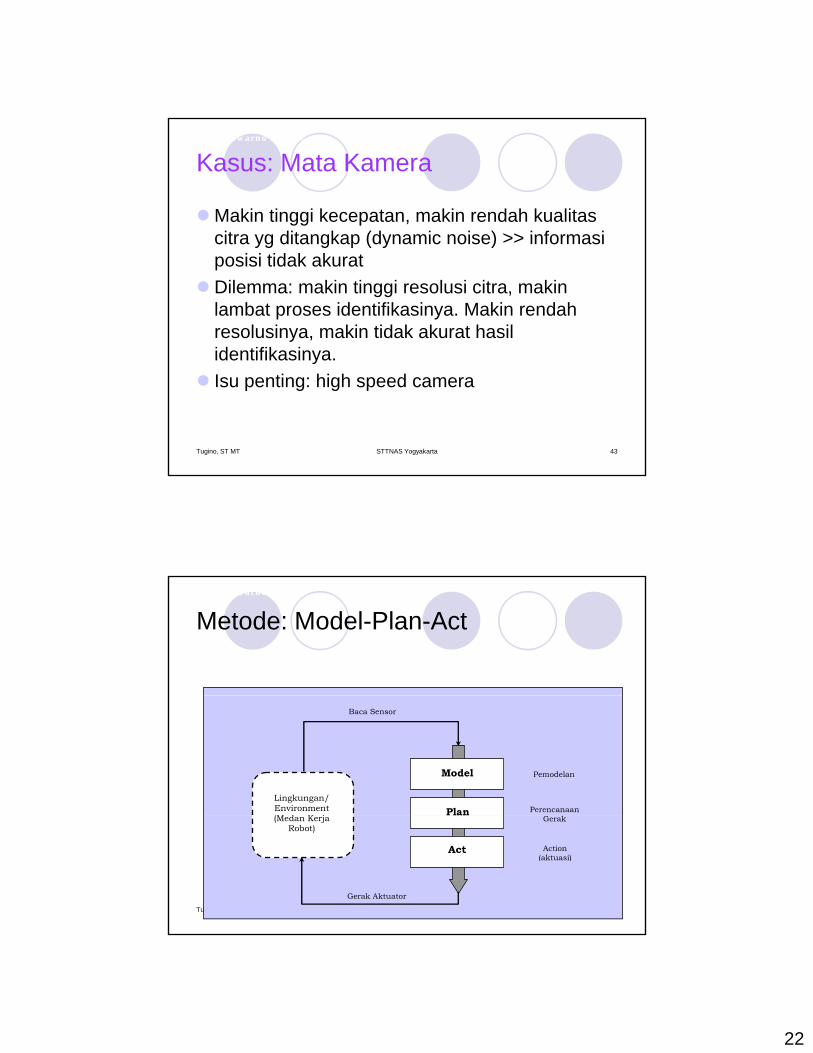
Metode: Model-Plan-ActEndra Pitowarno © 2007
Pemodelan
Baca Sensor
Lingkungan/ Environment ( d j
Perencanaan
Model
Plan
Tugino, ST MT STTNAS Yogyakarta 44
Action (aktuasi)
(Medan Kerja Robot)
Gerak Plan
Act
Gerak Aktuator
23
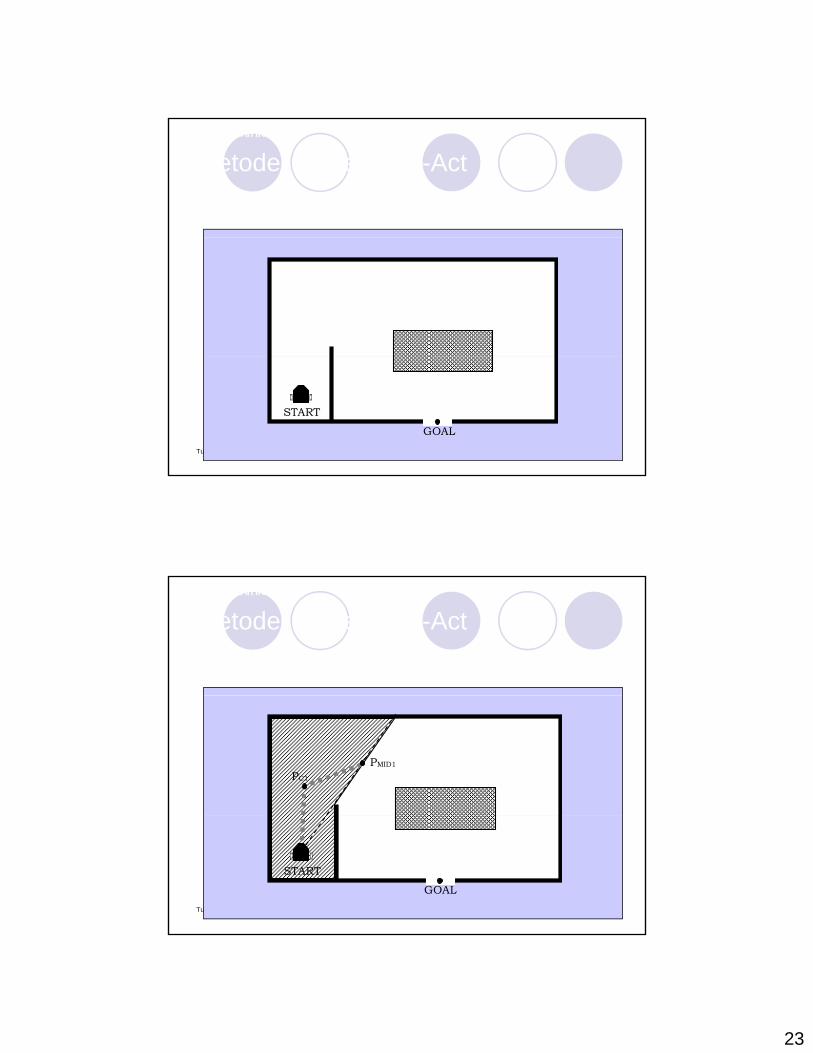
Metode: Model-Plan-ActEndra Pitowarno © 2007
Tugino, ST MT STTNAS Yogyakarta 45
GOAL
START
Metode: Model-Plan-ActEndra Pitowarno © 2007
PMID1 PC1
Tugino, ST MT STTNAS Yogyakarta 46
GOAL
START
24
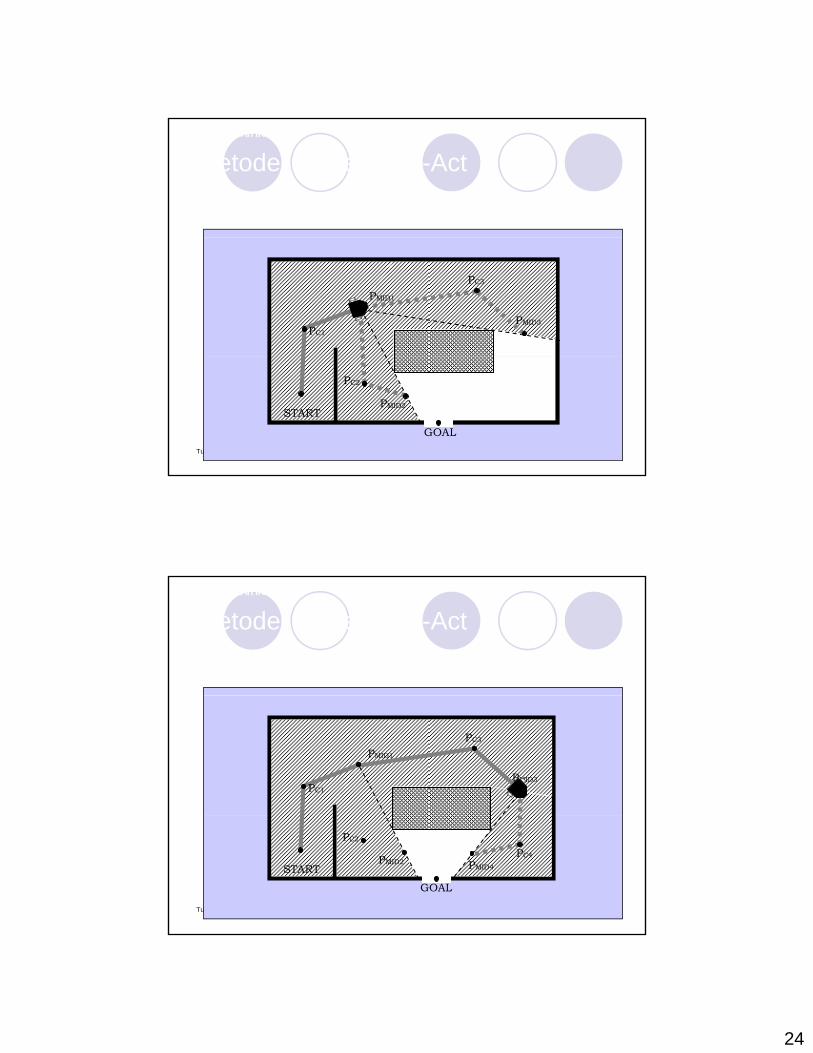
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
Tugino, ST MT STTNAS Yogyakarta 47
GOAL
START PMID2
PC2
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
Tugino, ST MT STTNAS Yogyakarta 48
GOAL
START PMID2
PC2
PMID4 PC4

25
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
Tugino, ST MT STTNAS Yogyakarta 49
START PMID2
PC2
GOAL
PC4 PMID4
PC5
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
PMID4
Tugino, ST MT STTNAS Yogyakarta 50
GOAL
START PMID2
PC2 PC3
26
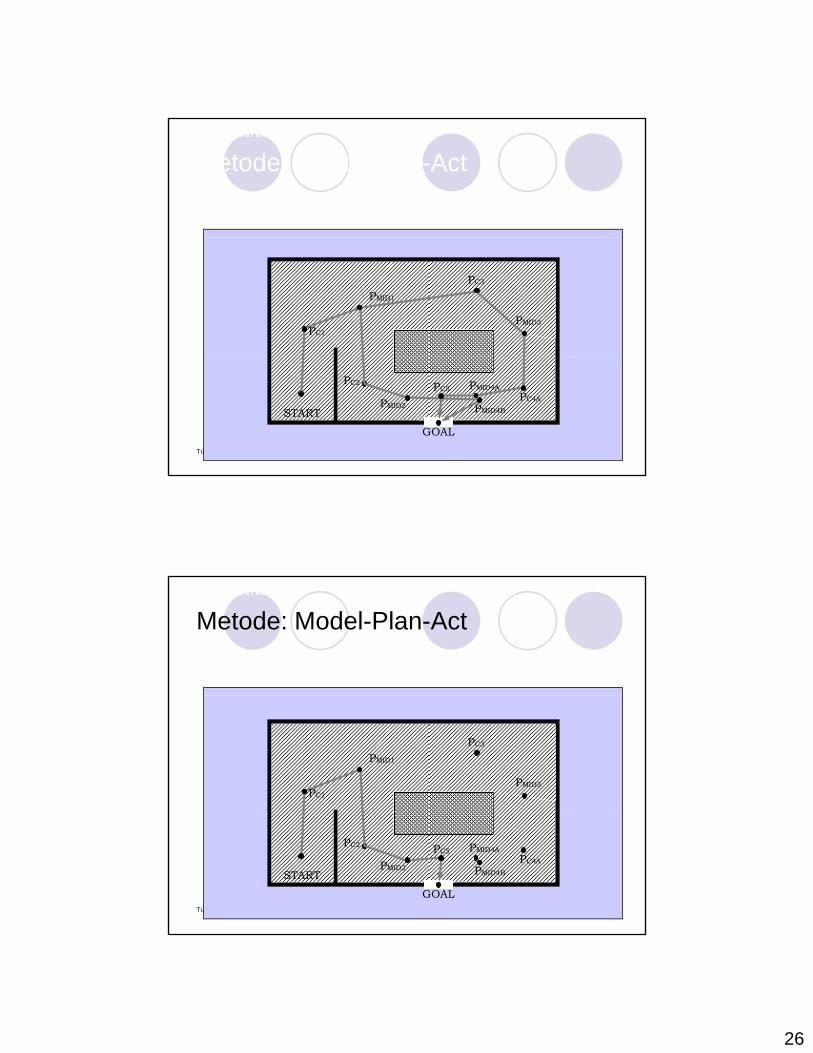
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
Tugino, ST MT STTNAS Yogyakarta 51
START PMID2
PC2
GOAL
PC4A PMID4A PC5
PMID4B
Metode: Model-Plan-ActEndra Pitowarno © 2007
PC1 PMID3
PMID1 PC3
Tugino, ST MT STTNAS Yogyakarta 52
START PMID2
PC2
GOAL
PC4A PMID4A PC5
PMID4B

27
Pengendalian Berbasis Komputer
Tugino, ST MT STTNAS Yogyakarta 53
Komputer Sebagai Pengendali
Tugino, ST MT STTNAS Yogyakarta 54

28
Pengendali Berbasis Prosesor Mikro
Tugino, ST MT STTNAS Yogyakarta 55
Pengendali Berbasis Prosesor Mikro
Tugino, ST MT STTNAS Yogyakarta 56
29
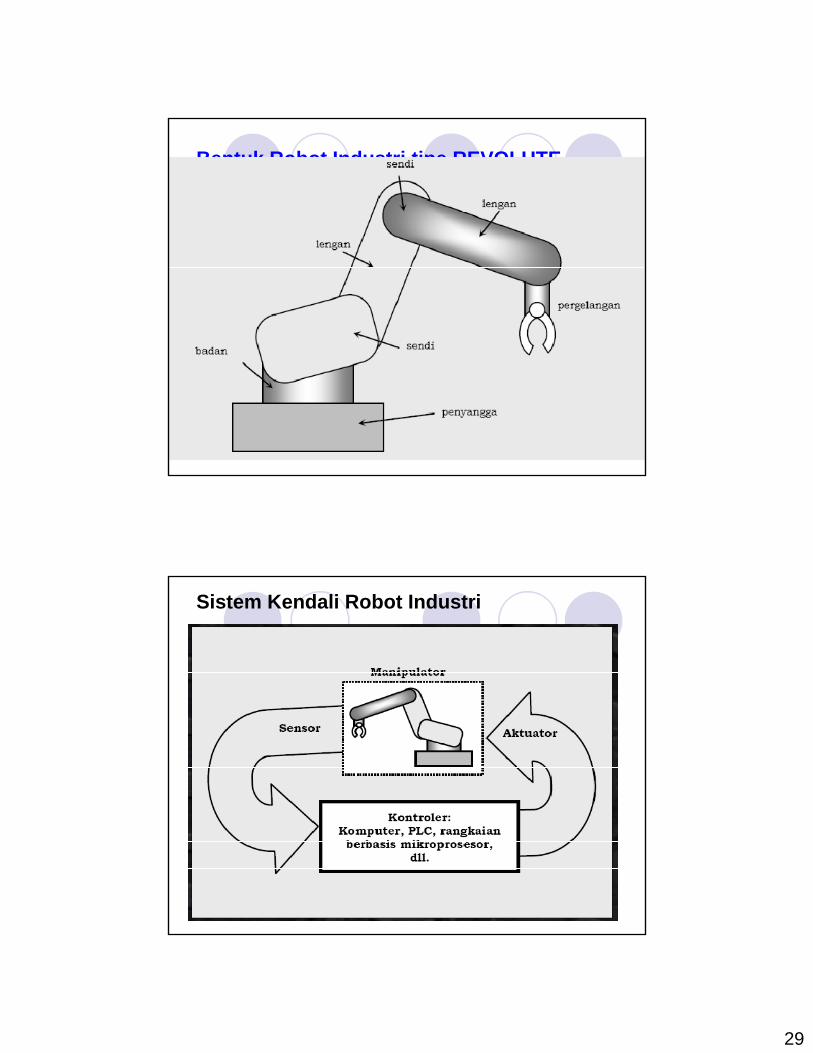
Bentuk Robot Industri tipe REVOLUTE
Tugino, ST MT STTNAS Yogyakarta 57
Sistem Kendali Robot Industri
Tugino, ST MT STTNAS Yogyakarta 58

30
Tugino, ST MT STTNAS Yogyakarta 59