Towards the understanding of hip squeak in total …...Hip joint bearings, (a) natural synovial...
11
Towards the understanding of hip squeak in total hip arthroplasty using analytical contact models with uncertainty Sebastian OBERST *,1,2,3 ; Zhi ZHANG 1 ; Graeme CAMPBELL 2 ; Michael MORLOCK 2 ; Joseph C.S. LAI 1 ; Norbert HOFFMANN 3 1 University of New South Wales, Acoustics and Vibration Unit, School of Engineering and Information Technology, Canberra, Australia 2 Hamburg University of Technology, Institute of Biomechanics, Hamburg, Germany 3 Department of Mechanical Engineering, Imperial College London, Department of Mechanical Engineering, London, United Kingdom ABSTRACT Osteoarthritis in hip joints affects patients’ quality of life such that often only costly orthopaedic surgeries i.e. total hip arthroplasty (THA) provide relief. Common implant materials are metal alloys, steel or titanium-based, plastics such as ultra-high molecular weight polyethylene, or biocompatible alumina and composite ceramics. Hard-on-hard (HoH) bearing articulations, i.e. ceramic-on-ceramic, or hard-on-soft combinations are used. HoH implants have been known to suffer from squeaking, a phenomenon commonly encountered in friction-induced self-excited vibrations. However, the frictional contact mechanics, its dynamics related to impingement, the effect of socket position, stem configuration, bearing size and patient characteristics are poorly understood. This study gives an overview of the state of the art biomechanical research related to squeaking in THA, with a focus on the effects of friction, stability, related wear and lubrication. An analytical model is proposed to study the onset of friction-induced vibrations in a simplified hemispherical hip stem rubbing in its bearing by varying the contact area. Preliminary results of the complex eigenvalue analysis and stick-slip motion analysis indicate that an increased contact fosters the development of instabilities, even at very small values of the friction coefficient owing to large local contact pressures. Keywords: biomechanics, contact conditions, friction I-INCE Classification of Subjects Number(s): 41.5, 11.8.9 * Corresponding author Sebastian Oberst ([email protected]) INTER-NOISE 2016 5539
Transcript of Towards the understanding of hip squeak in total …...Hip joint bearings, (a) natural synovial...

Towards the understanding of hip squeak in total hip arthroplasty using analytical contact models
with uncertainty
Sebastian OBERST*,1,2,3; Zhi ZHANG1; Graeme CAMPBELL2; Michael MORLOCK2; Joseph C.S. LAI1;
Norbert HOFFMANN3 1 University of New South Wales, Acoustics and Vibration Unit, School of Engineering and Information
Technology, Canberra, Australia 2 Hamburg University of Technology, Institute of Biomechanics, Hamburg, Germany
3 Department of Mechanical Engineering, Imperial College London, Department of Mechanical
Engineering, London, United Kingdom
ABSTRACT Osteoarthritis in hip joints affects patients’ quality of life such that often only costly orthopaedic surgeries i.e. total hip arthroplasty (THA) provide relief. Common implant materials are metal alloys, steel or titanium-based, plastics such as ultra-high molecular weight polyethylene, or biocompatible alumina and composite ceramics. Hard-on-hard (HoH) bearing articulations, i.e. ceramic-on-ceramic, or hard-on-soft combinations are used. HoH implants have been known to suffer from squeaking, a phenomenon commonly encountered in friction-induced self-excited vibrations. However, the frictional contact mechanics, its dynamics related to impingement, the effect of socket position, stem configuration, bearing size and patient characteristics are poorly understood. This study gives an overview of the state of the art biomechanical research related to squeaking in THA, with a focus on the effects of friction, stability, related wear and lubrication. An analytical model is proposed to study the onset of friction-induced vibrations in a simplified hemispherical hip stem rubbing in its bearing by varying the contact area. Preliminary results of the complex eigenvalue analysis and stick-slip motion analysis indicate that an increased contact fosters the development of instabilities, even at very small values of the friction coefficient owing to large local contact pressures. Keywords: biomechanics, contact conditions, friction I-INCE Classification of Subjects Number(s): 41.5, 11.8.9 * Corresponding author Sebastian Oberst ([email protected])
INTER-NOISE 2016
5539

1. INTRODUCTION Natural synovial joints are biotribological systems and complex, highly efficient bearings, which
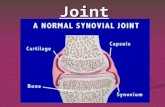
require multi-and inter-disciplinary research (1,2) covering orthopaedic science, tribology, solid and soft tissue science, biochemistry, biomaterials, fluid- and biomechanics. A human synovial joint is composed of bones (femur and pelvis) and cartilage, which are held together by the joint capsule, ligaments and muscles. The bearing articulation is immersed in the synovial fluid within the synovial membrane, which is surrounded by an articular capsule (see Figure 1(a)). The replacement of natural synovial joints in a process called total hip arthroplasty (THA) is one of the most successful orthopaedic surgeries of the 20th century (3).
Figure 1. Hip joint bearings, (a) natural synovial joint with the femur head and acetabulum covered with cartilage
inside the synovial membrane (4); and (b) two types of artificial joints; the cup replaces the acetabulum of the pelvis and articulates with the ceramic ball (head), tapered to the stem, which is anchored within the bone of the femur (5).
Over one million artificial joints per annum are implanted in the USA and the EU with tremendous costs to the health systems (5-7). As described by Jarrett et al. (8) or Mattei et al. (9), owing to degenerative bone disease (osteoarthritis), chronic pain and mobility restrictions, the quality of life of many patients is so significantly impacted that only orthopaedic surgery either in the form of resurfacing of the femoral head (10) or in the form of a total replacement of the joint can provide relief (11,12); there is also an effect of overweight, and an aging population.
However, in implanted artificial synovial joints such as an elbow’s hinge joint, the neck’s pivot joint, total knee arthroplasty (TKA), the saddle joint of the hand and most particular in the case of THA, large amplitude friction-induced vibrations, wear and squeak pose prominent problems in up to 20.9% of the patients (8,13,14). Owen et al. (15) analysed the impact of friction-induced vibrations and implant impingement owing to extreme movements or luxation in patients and estimated that THA and revision surgery for squeak in THA has now become the second most common form of total joint replacements after TKA in the US. Much in-vitro tests using laboratory simulators and cadaver or in-vivo (life animals or humans) experimental testing have been conducted (8,9,16-18) with focus on analysing and reducing material wear or friction. This was partly achieved by increasing the wear resistance or by enhancing the biocompatibility of the bearing materials e.g. by changing from polyethylene to ceramics.
Nowadays, common implant materials are based on alumina ceramics (C) such as AI3 (15) as well as metal alloys (M), which are mostly titanium-based, such as Ti6Al4V or cobalt-chromium based such as e.g. CoCrMo (19,20). In particular ceramics have an extremely high abrasive resistivity and are biologically inert. Plastics (P) such as ultra-high molecular weight polyethylene (UHMWP) are more often found in TKA than in THA, owing to higher pressures (21,22). Hence hard-on-hard bearing partners such as ceramic-on-ceramic (CoC) are only found in THA. The other hard-on-hard bearing type (metal-on-metal) has nearly disappeared from the market due to predominantly bad clinical results.
A THA system with a CoC bearing combination, represents a spherical/ hemi-spherical geometry and is typically composed of a stem, which is tapered into a ceramic, ball-shaped, head seated within
(a) (b)
INTER-NOISE 2016
5540

a hemispherical ceramic liner (Figure 1(b)). This ceramic liner is itself often press-fitted in a cup with or without a metal sleeve. The different components are connected to each other by tapers, e.g. the stem within the head (23,24) or over biological tissue in the case of artificial joint components, which are cemented or press-fitted into the femur or the acetabulum.
While squeaking is annoying to patients, the large amplitude vibrations may also increase loosening of the implants. Edge loading and stripe wear, which is accompanied by excessive friction and wear have been associated with the creation of squeaking or liner fractures. Apart from primary stability issues during surgery and the inflammation risk related to the recovery process, the abrasive particles constitute important risk factors. The particles can cause inflammatory joint responses (osteolysis) and ultimately can cause peri prosthetic fractures or prostheses loosening, consecutively requiring prosthesis revision, (8,25-28). Biochemical reactions between different materials combined with friction wear under insufficient lubrication can lead to further complications (1,2,9,15). Especially for young and active patients, their expensive and often painful revision surgeries with long recovery times (8,15-17) have motivated surgeons and implant designers (16) to focus on the longevity of total hip arthroplasty (THA).
However, the fundamental knowledge about the mechanics involved including those leading to squeaking still remains frustratingly limited. Therefore this paper will provide an overview of biomechanics research related to squeaking in THA and the effects of friction-induced vibrations, contact, wear and lubrication. An analytical model of a simplified hemispherical femoral stem rubbing in its bearing is suggested and is inspired by a study of Kang (29) on the effect of the contact area and micro-separation on the instability generation using the same methodology applied by Zhang et al. (30). It is anticipated that the model and its extension in the future is able to answer some of the questions related to instability generation in THA and its connection to friction and contact area or micro-separation. Preliminary results are discussed and enhancements for the analytical model are suggested.
2. OVERVIEW OF FRICTION-INDUCED VIBRATIONS, WEAR AND LUBRICATION
2.1 FRICTION AND WEAR While wear particles are related to friction or impingement, the occurrence of audible squeak in
hip joints indicates that friction feedback loops are established, in particular that of ‘whirl instabilities’ as found in the literature (13, 19, 20). Whirl instabilities belong to a larger class of instability mechanisms similar to those found in other systems with friction such as squeaking shoes on laminate flooring or chalk’s screechy sounds on a blackboard, train brake or train wheel squeal or automotive disc brake squeal (31,32). Friction-induced instabilities have been predicted numerically using the complex eigenvalue analysis (CEA) for models of artificial hip systems by assuming dry friction and stick-slip as the main destabilising mechanisms (13,19,20).
The CEA is a mathematical tool to predict the linear stability of a system based on Lyapunov’s theory of stability and is an established industrial standard to predict friction-induced vibrations in squealing brake systems (30-34). Its predicted instabilities are usually presented in dispersion diagrams, as real and imaginary parts plotted over a bifurcation parameter, as a damping ratio plotted over the eigenfrequency or in a root locus plots (35,36). Numerical studies of friction-induced vibrations related to hip squeak phenomena consider only dry friction conditions with friction coefficients ranging from zero to 0.2 (6,18); rarely friction coefficient values greater than 0.5 are used (19). For an autonomous system, after the application of both a nonlinear stress analysis and normal mode extraction, the system matrix is composed of asymmetric stiffness and/or negative damping terms owing to friction or follower forces.
(𝜆!𝐌∗ + 𝜆𝐂∗ + 𝐊∗)𝐲 = 0. (1) Here, 𝐌∗, 𝐂∗, and 𝐊∗constitute the structural mass, damping and stiffness matrices respectively
in their transformed diagonal form of 𝐀∗ = (𝑧!, 𝑧!,… , 𝑧!)!𝐀(𝑧!, 𝑧!,… , 𝑧!) . If the complex eigenvalue’s real part is positive, the system’s damping ratio turns negative, which indicates that friction provides energy via self-excitation. Apart from instability predictions, the complex eigenvalues can help calculate strain energy or the friction work of the system (33,37,38).
For instability calculations, the contact pressure and the generated friction force are similarly important and interrelated. Recent findings in brake squeal indicate that a partial loss of dry frictional contact influences significantly instability predictions, amplifies its sound radiation and can lead to chaotic interactions between the components of the friction pair (30,34,39). By using an
INTER-NOISE 2016
5541

analytical model, Li et al. (40) showed that separation and reattachment causes much higher vibration amplitudes and that neglecting a partial lift-off in instability predictions with frictional contact is deficient.
However only recently the CEA has been applied to the prediction of squeak in THA using simple finite element models with dry friction. According to Askari et al. (17), the general kinetic motion in hip implants and its gait cycle is to some degree experimentally validated (41,42) however no high-fidelity finite element simulations exist, and only few studies employ experimentally validated wear models or friction curves. There are few studies concerned with the contact area between the ball joint and the shell liner (14,18,19,29). By using metal-based strain gauges or piezo-resistive multi-wall carbon-nanotube-based miniature stress sensors for knee inserts in TKA (21,43), the stress, strain and contact pressures can be directly measured to determine the state of the implant and indirectly the wear of the paired materials. This information is yet to be implemented into numerical predictions. Wear particles, e.g. metal or ceramic, are also related to increased friction and to squeak generation (44). Reduced primary stability, i.e. a non-ideal implantation with an increased acetabular component abduction, larger component ante-version and inclination further aggravate wear, which can be 45 folds higher than without (18, 45). The kinetics within the bearing contact i.e. forces and their distribution are difficult to simulate correctly as they can only be directly measured at the foot using e.g. force plates. The estimation of contact forces within the joint is therefore the more over-determined the further away from the measurement location, hence causing a significant problem in setting up a reliable dynamic computer model of a hip’s implant.
By using a model-based approach to calculate analytically the contact between the head and the acetabular cup, Kang (29) showed that the generation of instabilities is more likely for a smaller contact area. Contrary to that, Zhang et al. (30) employed a reduced-order interconnected 3 × 3 dry-friction oscillator model of a pad on a steadily running belt with controllable contact conditions under different friction laws and found that the instability generation is significantly decreased for a reduced contact.
Further to improve the prediction quality of instabilities owing to frictional contact, probabilistic methods incorporating uncertain contact conditions have been shown to have high potential to compensate for nonlinearities as proven theoretically by Zhang et al. (46) and shown by Tison et al. (47) in the case of a full brake system. However, the true contact area as well as the clearance between the bearing partners, is extremely difficult if not impossible to determine and there have been no attempts to apply uncertainty methods to models of squeaking hips. Systems of life sciences suffer from a large variability caused by system complexity, natural biological variation and non-conform human actions as caused by the surgery itself. It is therefore likely that uncertainty methods in combination with traditional mechanics could provide practical solutions for such complex systems.
2.2 LUBRICATION Natural biotribological systems experience very small friction coefficients between µ = 0.001 to
0.006, with near zero wear presumably owing to the tribological properties of the joint lubricated by the synovial fluid (5). In a synovial joint, the contacting articular cartilage covers the bone and is bathed in the synovial fluid (SF) which forms a 50 µm thin film in the contact area within the synovial cavity (48), all being enclosed by the synovial membrane as depicted in Figure 1(a). The articulate cartilage itself is a highly complex natural composite material consisting of water, which is enmeshed in a network of collagen fibres and high molecular weight proteoglycans (1). These highly glycosylated proteins, i.e. carbohydrates all attached to a hydroxyl group, act as an additional damping layer and possess the ability to self-repair. The SF with its load-bearing, damping and lubricating (due to lubricin) capabilities (5) plays a crucial role in a functional joint being produced in the synoviocytes, a specialised layer of cells (one to two cells in thickness) on the synovial lining tissue (49). Recent results indicate that the SF composition, especially the hyaluronic acid, is essential in providing accurate lubricating and damping properties. Fortunately after total joint arthroplastic replacement surgery, regenerated pseudo-synovial linings take over the production of SF so that the artificial joint is again provided with its natural lubricant after some recovery period (49). Hence, the vibrations, squeak and excessive wear cannot be a result of a missing synovial membrane or lubricants.
Many experimental studies were conducted to explain the mechanisms of synovial joint
INTER-NOISE 2016
5542

lubrication including hydrodynamic, weeping, thin-film, boundary layer or squeeze film lubrication using bovine or pig cartilage samples (1). In general, the SF acts like a fluid film bearing on top of the cartilage, taking into account the little grooves, micro-cavities under poro-elasticity and changing cartilage’s sub-surface properties owing to sliding friction (26,50). The so-called 𝜆 – ratio relates the minimum lubrication film thickness to the composite roughness of the mating surfaces 𝜆 =𝑅!!! + 𝑅!!! . The 𝜆 – ratio is used to describe which lubrication regime dominates in the
micro-separation regime: for 𝜆 < 1 boundary lubrication is dominating, for 1< 𝜆 < 3 a mixed lubrication regime is present while the fluid film lubrication is sustained for 𝜆 ≥ 3 (51,52).
The 𝜆 – ratio’s numerator is strongly influenced by the gait cycle during walking or in general the activity of a patient. In an early gait cycle stage, the SF layer is thicker and rather of elasto-hydro-dynamic lubrication. In contrast, for large oscillatory joint motion the boundary lubrication type is present in as found in a later stage of the gait cycle. Mostly in a nonlinear visco-elastic dynamic regime, with time-dependent storage and loss modulus, the SF provides an immediate damping response to sudden forces, which otherwise could damage the joints (48). Hence, for high pressures and quick motion, the fluid would also act as a squeeze film damper with feeding grooves producing hydrodynamic forces within the fluid film, which provide extra damping properties over hydrodynamic forces (1,52-54). Similar to friction and contact, the squeeze film and its damping action with interacting cartilage layers is highly nonlinear.
Since biological synovial joints such as the hip are extremely complex, no reliable models exist yet. Hence, these complex systems have not yet been computationally simulated and research is mostly done experimentally to focus on cartilage repair and understanding the fluid and its reactions with the cartilage itself (55,56). How the lubrication in a micro-separation regime (5,51,54) influences the nonlinear dynamics, the prediction of friction-induced vibrations, its effect on damping and how the lubrication of an artificial joint is different from that of a natural joint have not been answered conclusively (6,18).
3. ANALYTICAL HIP JOINT MODEL WITH UNCERTAIN CONTACT CONDITIONS With the advent of high speed computing, complex finite element (FE) parametric and
optimisation studies have been conducted (2), studying more realistic geometry and interactions in the artificial synovial joint. However, models and analyses used are still rather simplistic, considering the complexity of the natural biotribological joint; experimentally validated contact stiffness, modal damping and more complex contact conditions, such as partial contact loss i.e. micro-separation (5) are not considered in simulations. The numerical analyses conducted so far concentrated on wear rate simulations; more frequently simple geometric ‘stability’ is studied, i.e. clearances and femoral head subluxation (i.e. dislocations) as a function of ante-version and inclination of the femoral stem.
3.1 Model description
Figure 2. An analytical model (a) simulating a spherical – hemi spherical frictional contact; (b) magnification of
one oscillator in contact
Figure 2(a) shows an analytical model of nine coupled oscillators simulating the hemi-spherical contact
180
m1
m2
m3m4 m5
m6
m7
m8
m9
90
θ!
kc1
kc2
kc3kc4 kc5
k c6
k c7k c8
k c9
x
yk1
k2
k3
k4k5 k6
k7
k8
k9
k10(a)
180
mi
x
y
kj+1
(b)
kj
friction
iϕ
ikcβi
jα 1+jα
INTER-NOISE 2016
5543

problem, a geometric configuration also encountered in artificial hip joints. The primary feature of this model is the control of the coefficient of friction and the contact condition of each individual oscillator. By locally varying the frictional contact, i.e. by randomising the number of oscillators in contact as well as the friction coefficient, the effects on the global dynamics’ instability is studied. The oscillators with masses mi (i = 1…9) are interconnected via springs with a stiffness kj (j = 1…10); all masses are in point contact with a rigid socket which represents the acetabular cup (Figure 2(b)) rotating with a constant angular velocity !θ . Figure 2(b) illustrates the detail of a single oscillator mi, which shows the inclined angle of springs kj and kj+1 with respect to the x-axis are 𝛼! and 𝛼!!!. The contact reaction force is caused by the spring of stiffness 𝑘!",that has an inclination angle of βi. The direction of the friction force is perpendicular to that of contact force and inclined with angle 𝜙!with respect to the x-axis; as friction law the Amonton-Coulomb model is chosen. The model’s matrix equation in the steady-sliding state without damping can be written as
M!!U+KU = 0 (2).
In equation (2), M is the mass matrix, and dots indicate the first and the second derivative of the
displacement U with respect to time. The displacement and the mass matrix are defined as
U = x1, y1, x2, y2, ! x9, y9⎡⎣
⎤⎦T
, (3)
M = diag m1, m1, m2, m2, !, m9, m9⎡⎣
⎤⎦T
, (4)
with “T” representing the Hermitian transpose. The stiffness matrix K is a composition of 𝐊 = 𝐊!"#$% + 𝐊! + 𝐊!, (5)
where 𝐊!"#$%, 𝐊!, and 𝐊! are the stiffness matrices due to the interconnecting springs kj (j = 1…10), the
contact springs kic (i= 1…10), and the friction elements respectively:
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−
−
+−
−+−
−+
=
1099
9
323
3322
221
inter
KKK0K
KKKKKKK
0KKK
K!!!
Kc =
Kc1 0Kc2
Kc3
!0 Kc9
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
K f =
K f 1 0
K f 2
K f 3
!0 K f 9
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
(6)
where
K j = k jcos2α j sinα j cosα j
sinα j cosα j sin2α j
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥, Kci = kci
cos2 βi sinβi cosβisinβi cosβi sin2 βi
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥,
K fi = kciµi
cos3 βi cosφi + sin2 βi cosβi cosφi sinβi cos
2 βi cosφi + sin3 βi cosφi
cos3 βi sinφi + sin2 βi cosβi sinφi sinβi cos
2 βi sinφi + sin3 βi sinφi
⎡
⎣
⎢⎢
⎤
⎦
⎥⎥. (7)
Monte Carlo simulations (30,41,46) are conducted with respect to the output of complex eigenvalue analyses (CEA) using equation (2) in order to investigate the effect of uncertainty in the friction coefficient and the contact conditions on the instability prediction. In order to quantify a probability of generating instabilities with a certain mode due to changing contact conditions 6, 7, 8 or 9 oscillators are randomised to be in contact with the socket. For six oscillators in contact, the number of different combinations (i.e. sequence does not play a role) of oscillators in contact is !! = !!
!!! !!!= 84. For each choice, the CEA is performed 1000 times with randomly generated
INTER-NOISE 2016
5544

friction coefficients µ using a uniform distribution 𝑢𝑛𝑖~(0,0.1). All other model parameters value are set as m1-9 = 22.22 kg, k1-10 = 1.05×109 N/m, kc1-c9 = 3.98×109 N/m. The total mass approximates a maximum load during a normal gait cycle, which is equivalent to the weight of about 200 kg times 9.81 m/s2, which corresponds to 238% for a body weight of 84 kg, cf. (59). The stiffness parameters are adopted from the in-vitro experimental data of Piriou et al. (15). The values of angles α1-10, β1-9 and φ 1-9 are listed in Table 1.
Table 1. The value of angles α, β and φ α1 α2 α3 α4 α5 α6 α7 α8 α9 α10
78.75° 101.25° 123.75° 146.25° 168.75° 191.25° 213.75° 236.25° 258.75° 281.25° β1 β2 β3 β4 β5 β6 β7 β8 β9
180° 202.5° 225° 247.5° 270° 292.5° 315° 337.5° 0° φ1 φ2 φ3 φ4 φ5 φ6 φ7 φ8 φ9
270° 292.5° 315° 337.5° 0° 22.5° 45° 67.5° 90°
3.2 Results and analysis
Figure 3. Frequency of occurrence of instability for each mode under the conditions of (a) 6, (b) 7, (c) 8, and (d)
9 oscillators in contact with the socket Figure 3 shows boxplots of the spread of the frequency of occurrence of the real part being
positive induced by the different combination of oscillators in contact. For the partial contact conditions, i.e. 6, 7, 8 oscillators in contact, the minimum frequency of occurrence can be zero suggesting that this instability is sensitive to the choice of oscillators in contact. Figure 3 shows that the more oscillators in contact, the higher the propensity to squeak because the mean value of the frequency of occurrence increases with the number of oscillators in contact. Only when all oscillators are in contact, four modes are unstable; otherwise three modes are unstable. The instabilities of modes 15 and mode 18 are less sensitive to the uncertainty in the friction coefficient and contact conditions than those of mode 11 and 14. This is in contrast to what has been found in (30), which suggested that a smaller contact area produces a higher propensity to squeak. For Figure 3(d), the frequency of occurrence does not spread since only one combination (nine oscillators in contact) is considered here.
Generally the squeak propensity is influenced by both the contact area and preload. The total load acting on the sphere remains unchanged for a changed contact area, which in turn induces higher local loading. As a result, it is difficult to conclude whether the higher instability propensity is caused by smaller contact area, or caused by a higher preloading condition. From the energetic point of view, the mechanical energy of the oscillators can only come from the kinetic energy of the rotational socket; in an extreme case for zero oscillators in contact no energy can be transferred and no instability is generated.
Figure 4 displays the mode shapes of mode 15 and mode 18 for the full contact condition which shows both mode 15 and mode 18 are dominated by the oscillator on the very left, similar to the leading edge nodes of a pad which feed in most of the energy in automotive disc brake squeal (30,33).
11 12 13 14 15 16 17 180
50
100
Mode index11 12 13 14 15 16 17 18
0
50
100
Freq
uenc
y of
occ
uren
ce in
%
Minimum
Mean
Maximum
(d)(c)
(a) (b)
INTER-NOISE 2016
5545

Figure 4. Mode shape of (a) mode 15, and (b) mode 18
Figure 5. Mode coupling mechanism for triggering mode 15 and mode 18’s instability
Figure 5 shows the evolution of the real part of complex eigenvalue and the natural frequency of mode 15 and mode 18 as the friction coefficient varies. As the friction coefficient increases, the natural frequency of mode 15 [mode 17] tends to be close to mode 16 [mode 18], while the real part of complex eigenvalue becomes positive after the “Lock in” point (57). This suggests that the system first stiffens then, shortly before it couples becomes more compliant before it gets stiffer again after instability. The mechanism for triggering the instability of mode 15 and mode 18 is mode coupling and that the friction coefficient needed for triggering instability is rather low, which has also been observed in the literature (6,17,19,20). For mode 15 and mode 18, the bifurcation occurs at a friction coefficient of 0.056 and 0.052, respectively. For higher friction coefficients, many more modes become unstable. However, as the onset of squeak is of interest and as the low friction coefficients found here are also consistent with experimental testings (1,2,18) and numerical findings in Weiss et al. (6), friction coefficients higher than 0.1 can be assumed to be physically not meaningful for the problem of hip squeak.
The system in Figure 2 studied here is inherently more asymmetric than plane systems, i.e. systems which are characterised by the direction of friction to be parallel with one axis of the global coordinate system (30,35). In (30,35), the asymmetry of the stiffness matrix, which is a necessary condition to produce a positive real part of complex eigenvalue, is controlled by the two inclined springs that produce forces, which induce off-diagonal entries of the stiffness matrix. For the model in Figure 2, not only the springs connected to the oscillators but also the friction would cause inclined forces with respect to the global coordinate system. This suggests in a spherical/hemi-spherical contact situation, the system may undergo instability even though the friction coefficient is very low.
-5 0 5-6
-4
-2
0
x
y
-5 0 5-6
-4
-2
0
x
-5 -4.5 -4 -3.5 -3-4
-2
0
Deformed Undeformed
(b)(a)
INTER-NOISE 2016
5546

4. Discussions Self-excited vibration and energy dissipation via unwanted squeaking noise emission constitutes a fundamental flaw in hip implant designs. Not only sound emission is unwanted, the friction itself is not desired which is different brake squeal. Considering the low friction coefficient in natural synovial joints (1), one possible reason for hip squeak in artificial synovial joints could be that the friction between the femoral head (ball) and the acetabulum (socket) of the joint is increased owing to a rupture of the lubricating fluid film (1,2,18,19). However, as identified in this review, since not much research has been conducted in studying the structural dynamic stability of artificial synovial joints, the resulting time-dependent contact phenomena such as stick-slip-separation waves, cf. (17,18, 31,33,37), nonlinear interactions with bones, or interacting effects due to a fluid film rupture (1,2,19,20,25,26) and lubricated frictional contact (48-50) also have not been studied.
Therefore we suggested a two-dimensional spherical/ hemi-spherical model of 9 × 1coupled oscillators of an artificial synovial joint similar to the frictional contact simulated by Zhang et al. (30). The model allowed the contact area and the friction coefficient to be controlled and randomised. Results suggest that instabilities are generated even for very low friction coefficients due to the system inherent asymmetry (19). The contact area influences the generation of unstable vibrations in the same way as found for the simplified brake system studied in (30): the larger the contact area the more likely squeak is induced. Especially the leading edge of the contact area seems to play an important role in generating instabilities, similar to the leading edge of the brake pad (30,33).
While the model used here is only two-dimensional with a rather large and coarse contact area, a three dimensional case with a denser contact mesh would provide more realistic results. Also, here the rigid socket as the model of the acetabular cup is rotating with a constant velocity; in reality rather the femoral bone is moving and experiences a direction reversal of the relative velocity. The reversal of the direction requires a friction coefficient model with the sign-function to be approximated by an arctan-function or a system in the time domain. How the contact and its multi-scale, fractal effects including various friction laws as well as micro-separation, lubrication and damping influence the generation of instabilities needs to be studied in the future by including scale dependent friction laws, lubrication, and by coupling finite element modelling with numerical molecular simulations (57,58). A validation with experiments using an updated finite element model of a hip implant and in-vitro as well as in-vivo or cadaver tests in conjunction with analytical modelling could help to identify the underlying true physics of friction, wear and squeak in artificial synovial joints for designing enhanced implant systems.
REFERENCES 1. Furey MJ, Burkhardt BM. Biotribology: Friction, wear, and lubrication of natural synovial joints. Lub
Sci. 1997; 9:255-271. 2. Elkins JM, Callaghan JJ, Brown TD. The ‘Landing Zone’ for wear and stability in total hip
arthroplasty is smaller than we thought: A computational analysis. Clin Ortho Rel Res. 2015; 473:441-452.
3. Wroblewski BM,_Fleming PA, Siney PD, Charnley low-frictional torque arthroplasty of_the hip._20–30 year results._J Bone Joint_Surg, 1999;_ 81:427–430.
4. BBC,http://www.bbc.co.uk/bitesize/standard/biology/the_body_in_action/movement/revision/3/, 2014
5. Kontinnen YT, Zhao D, Beklen A, Ma G, Takagi M et al. The microenvironment around total hip replacement prostheses. Clin Ortho Rel Res. 2005; 430:28-38.
6. Weiss C, Gdaniec P, Hoffmann NP, Hothan A, Huber G et al. Squeak in hip endoposthesis systems: An experimental study and a numerical technique to analyze design variants. Medi Eng Phys. 2010; 32:604-609.
7. Carr AJ, Robertsson O, Graves S, Price AJ, Arden NK et al. Knee Replacement. The Lancet. 2012: 379:1331-1340.
8. Jarrett CA, Ranawat AS, Bruzzone M, Blum YC, Rodriguez JA et al. The squeaking hip: a phenomenon of ceramic-on-ceramic total hip arthroplasty. J Bone Joint Surg. 2009; 91:1344-1349.
9. Mattei L, Di Puccio F, Piccigallo B, Ciulli E. Lubrication and wear modelling of artificial hip joints: A review. Trib Intern. 2011; 44: 532–549.
10. Rothstock S, Uhlenbrock A, Bishop N, Laird L, Nassutt R, Morlock M, Influence of interface condition and implant design on bone remodelling and failure risk for the resurfaced femoral head. J
INTER-NOISE 2016
5547

Biomech 2011; 44: 1646-1653. 11. Liu Y, Warner JA, Gladkis LG, Scarvell JM, Smith PH et al. Microscratching characterization of the
wear-in of UHMW polyethylene in prostheses. Tribo Let. 2013; 49:439-450. 12. Zietz C, Reinders J, Schwiesau J, Paulus A, Kretzer JP et al. Experimental testing of total knee
replacements with UHMW-PE inserts: impact of severe wear test conditions. J Mat Sci: Mat Med. 2015; 26:134.
13. Hothan A, Lewerenz K, Weiss C, Hoffmann N, Morlock M et al. Vibration transfer in the ball–stem contact interface of artificial hips. Med Eng Phys. 2013; 35: 1513–1517.
14. Sidebottom M, Allan DG, Paliwal M. Ceramic-on-ceramic hip implants: analysis of friction induced squeal. ASME Proc Biomed Biotech Eng. 2014; 14-20 Nov, Montreal, Canada.
15. Owen DH, Russell NC, Walter WL, Smith PN. An estimation of the incidence of squeak and revision surgery for squeak in ceramic on ceramic total hip replacement. Bone Joint J. 2014; 96-B:181-187.
16. Piriou P, Ouenzerfi G, Migaud H, Renault E, Massi F, Serrault M. A numerical model to reproduce squeaking of ceramic-on-ceramic total hip arthroplasty. Influence of design and material. Orthopaedics & Traumatology: Surgery & Research. 2016. In press. http://dx.doi.org/10.1016/j.otsr.2016.03.005
17. Askari E, Flores P, Dabirrahmani D, Appleyard, R. Dynamic modeling and analysis of wear in spatial hard-on-hard couple hip replacements using multibody systems methodologies. Nonl Dyn. 2015; 82: 1039-1058.
18. Askari E, Flores P, Dabirrahmani D, Appleyard R. A review of squeaking in ceramic total hip prostheses. Trib Intern. 2016; 93: 239–256.
19. Weiss C, Hothan A, Huber G, Morlock MM, Hoffmann NP, Friction-induced whirl vibration: Root cause of squeaking in total hip arthroplasty, J Biomech, 2012; 45: 297-303.
20. Fan N, Morlock MM, Bishop NE, Huber G, Hoffmann N, Ciavarella M, Chen GX, Hothan A, Witt F. The Influence of Stem Design on Critical Squeaking Friction with Ceramic Bearings. J Orthop Res. 2013; 31:1627–1632.
21. Do Q, O’Byrne S, Perriman D, Smith P. Piezoresistive Nanocomposite as an embedded stress sensor in instrumented knee prosthesis, Proc 37th Conf IEEE Eng Med Biol Sci. 2015; 2677-80. doi: 10.1109/EMBC.2015.7318943.
22. Sobieraj MC, Rimnac CM. Ultra High Molecular Weight Polyethylene: Mechanics, Morphology, and Clinical Behaviour. J Mech Beh Biomed Mat. 2009; 2: 433-443.
23. Rehmer A, Bishop NE, Morlock MM. Influence of assembly procedure and material combination on the strength of the taper connection at the head–neck junction of modular hip endoprostheses. Clin Biomech 2012; 27: 77–83.
24. Witt F, Gührs J, Morlock MM, Bishop NE, Quantification of the Contact Area at the Head-Stem Taper Interface of Modular Hip Prostheses, PLoS ONE 2015; 10:e0135517. doi:10.1371/journal.pone.0135517.
25. Kiyama T, Kinsey TL, Mahoney OM. Can Squeaking With Ceramic-On-Ceramic Hip Articulations In Total Hip Arthroplasty Be Avoided? J Arthropl. 2013; 28: 1015–1020.
26. Reinders J, Sonntag R, Kretzer JP. Synovial Fluid Replication in Knee Wear Testing: An Investigation of the Fluid Volume” J Orthop Res. 2014; 33:92-7.
27. Liu Y, Warner JA, Gladkis LG, Scarvell JM, Smith PN, Timmers H, 'Microscratching characterization of the wear-in of UHMW polyethylene in prostheses', Tribology Letters, 2013; 49: 439 - 450, http://dx.doi.org/10.1007/s11249-012-0087-5
28. Warner JA; Gladkis LG; Timmers H, A new radioisotope tracing method of UHMWPE wear particle dispersion using 97Ru, J Mech Beh Biomed Mat 2011; 4: 776 - 784, http://dx.doi.org/10.1016/j.jmbbm.2010.09.001
29. Kang J, Dynamic instability of a spherical joint under various contact areas, Proc Inst Mech Eng C – J Mech Eng Sci. 2014; 229:54-58.
30. Zhang Z, Oberst S, Lai JCS. Instability analysis of friction oscillators with uncertainty in the friction law distribution. Proc Inst Mech Eng C – J Mech Eng Sci. 2015; doi: 10.1177/0954406215616421.
31. Akay A. Acoustics of Friction. J Acoust Soc Am. 2002; 111:1525-1548. 32. Papinniemi A, Lai JCS, Zhao J, Loader L. Brake squeal: A literature review. Appl Acoust, 2002; 63,
391 - 400, http://dx.doi.org/10.1016/S0003-682X(01)00043-3 33. Oberst S, Lai JCS. Pad-mode-induced instantaneous mode instability for simple models of brake
systems. Mech Sys Sig Proc. 2015; 62: 490-505. 34. Oberst S, Lai JCS, Marburg S. Guidelines for numerical vibration and acoustic analysis of disc brake
INTER-NOISE 2016
5548

squeal using simple models of brake systems. J Sound Vib. 2013; 332: 2284–2299. 35. Hoffmann N, Fischer M, Allgaier R, Gaul L, A minimal model for studying properties of the
mode-coupling type instability in friction induced oscillations, Mech Res Comm 2003; 29, 197-205. 36. Mace BR, Manconi E, Wave motion and dispersion phenomena: Veering, locking and strong coupling
effects, J Acoust Soc Am 2012; 131: 1015-1028. 37. Guan D, Huang J. The method of feed-in energy on disc brake squeal. J Sound Vib. 2003; 261:297–
307. 38. Zhang Z, Oberst S, Lai JCS. Application of polynomial chaos expansions to analytical models of
friction oscillators, Proc Acoustics 2013, 17-20 Nov, Victor Harbor, Australia. 39. Oberst S, Lai JCS, Nonlinear transient and chaotic interactions in disc brake squeal, J Sound Vib
2015; 342, 272-289. 40. Li Z, Ouyang H, Guan Z, Nonlinear friction-induced vibration of a slider-belt system, J Vib Acoust
2016; DOI:10.1115/1.4033256 41. Scarvell JM, Pickering MR, Smith PN. New registration algorithm for determining 3D knee
kinematics using CT and single-plane fluoroscopy with improved out-of-plane translation accuracy. J Orthop Res. 2009; 28: 334-340.
42. Muhit AA, Pickering MR, Scarvell JM, Ward T, Smith PN. Image‐assisted non-invasive and dynamic biomechanical analysis of human joints. Phys Med Biol. 2013; 58: 4679-4702.
43. Arami A, Simoncini M, Atasoy O, Ali S, Hasenkamp W et al. Instrumented Knee Prosthesis for Force and Kinematics Measurements. IEEE Trans Autom Sci Eng. 2013; 10:615-624.
44. Bishop N, Witt F, Pourzal R, Fischer A, Rütschi M, Michel M, Morlock M. Wear Patterns of Taper Connections in Retrieved Large Diameter Metal-on-Metal Bearings J Orthop Res 2013; 31:1116-22. DOI 10.1002/jor.22326
45. Walter WL, Kurtz SM, Esposito C, Hozack W, Holley KG. Retrieval analysis of squeaking alumina ceramic-on-ceramic bearings. Bone Joint J. 2011; 93-B: 1597-1601.
46. Zhang Z, Oberst S, Lai JCS. On the potential of uncertainty analysis for prediction of brake squeal propensity. J Sound Vib (revision submitted May 2016).
47. Tison T, Heussaff A, Massa F, Turpin I, Nunes RF. Improvement in the predictivity of squeal simulations: Uncertainty and robustness. J Sound Vib. 2014; 333: 3394-3412.
48. Zhang Z, Christopher GF. The nonlinear viscoelasticity of hyaluronic acid and its role in joint lubrication. Soft Matter. 2015; 11:2596-2603.
49. Kung MS, Markantonis J, Nelson SD, Campbell P. The synovial lining and synovial fluid properties after joint arthroplasty. Lubricants. 2015; 3:394-412.
50. Nosonovsky M, Bhushan B. Multiscale friction mechanisms and hierarchical surfaces in nano- and bio-tribology. Mat Sci Eng. 2007; R58: 162-193.
51. Stewart T, Tipper J, Streicher R, Ingham E, Fisher J. Long-term wear of HIPed alumina on alumina bearings for THR under microseparation conditions. J Mat Sci: Mat Med. 2001; 12:1053-1056.
52. Zhao J, Linnett I, McLean L. Stability and bifurcation of unbalanced response of a squeeze film damped flexible rotor. J Trib. 1994; 116: 361-386.
53. Chang-Jian C-W, Yau H-T, Chen J-L. Nonlinear dynamic analysis of a hybrid squeeze-film damper-mounted rigid rotor lubricated with couple stress fluid and active control. Appl Math Mod 2010; 34:2493-2507.
54. Sariali E, Stewart T, Jin Z, Fisher J. Three-dimensional modeling of in vitro hip kinematics under micro-separation regime for ceramic on ceramic total hip prosthesis: An analysis of vibration and noise. J Biomech, 2010; 43:326-333.
55. Parkes M,Connor M, Cann PM, Wong JSS The effect to buffer solution choice on protein adsorption and lubrication, Tribology International 2014; 72: 108–117.
56. Parkes M, Myant C, Dini D, Cann P, Tribology-optimised silk protein hydrogels for articular cartilage repair, Tribology International 2015; 89: 9–18.
57. Massi F, Baillet L, Giannini O, Sestieri A, Brake squeal: Linear and nonlinear numerical approaches, Mechanical Systems and Signal Processing, 2007; 21: 2374-2393.
58. Theodosioua TC, Saravanos DA, Molecular mechanics simulations of graphene using finite elements, European Journal of Computational Mechanics, 2013; 22: 59-78.DOI:10.1080/17797179.2013.766016
59. Bergmann G, Deuretzbacher G, Heller M, Graichen F, Rohlmann A, Strauss J, Duda GN, Hip contact forces and gait patterns from routine activities, J Biomech, 2001; 34: 859–871.
INTER-NOISE 2016
5549





![Synovial Chondromatosis of the TMJ: MR and CT Findings · Synovial Chondromatosis of the TMJ: ... often in larger joints, such as the ... and hip [1 , 2]. Synovial chondromatosis](https://static.fdocuments.in/doc/165x107/5adafbfc7f8b9a86378e15b7/synovial-chondromatosis-of-the-tmj-mr-and-ct-chondromatosis-of-the-tmj-often.jpg)