
Towards Believable Resource Gathering Behaviours in Real ... · aMulti-plAtform Game Innovation...
9
Procedia Computer Science 24 (2013) 143 – 151 1877-0509 © 2013 The Authors. Published by Elsevier B.V. Selection and peer-review under responsibility of the Program Committee of IES2013 doi:10.1016/j.procs.2013.10.037 ScienceDirect 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 Towards Believable Resource Gathering Behaviours in Real-time Strategy Games with a Memetic Ant Colony System Xianshun Chen a , Yew Soon Ong a,∗ , Liang Feng a , Meng Hiot Lim b , Caishun Chen a , Choon Sing Ho a a Multi-plAtform Game Innovation Centre (MAGIC), School of Computer Engineering, Nanyang Technological University, Singapore b School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore Abstract In this paper, the resource gathering problem in real-time strategy (RTS) games, is modeled as a path-finding problem where game agents responsible for gathering resources, also known as harvesters, are only equipped with the knowledge of its immediate sur- roundings and must gather knowledge about the dynamics of the navigation graph that it resides on by sharing information and cooperating with other agents in the game environment. This paper proposed the conceptual modeling of a memetic ant colony system (MACS) for believable resource gathering in RTS games. In the proposed MACS, the harvester’s path-finding and resource gathering knowledge captured are extracted and represented as memes, which are internally encoded as state transition rules (mem- otype), and externally expressed as ant pheromone on the graph edge (sociotype). Through the inter-play between the memetic evolution and ant colony, harvesters as memetic automatons spawned from an ant colony are able to acquire increasing level of capability in exploring complex dynamic game environment and gathering resources in an adaptive manner, producing consistent and impressive resource gathering behaviors. Keywords: Memetic Computing; Ant Colony; Resource Gathering; Path Finding 1. Introduction With the advancements in graphics and physics engines reaching the stage of maturity, game researchers are now turning to artificial intelligence (AI) as an increasingly influential factor for enhancing the quality of user experiences and furthering the growth of game innovation and believability. At the same time, due to the dynamic nature and complexity of digital games, many challenges in the field have posed as interesting problems that can be addressed using artificial intelligence and computational intelligence (CI) technologies. One of these challenges is the dynamic path-finding and resource gathering problem commonly found in real-time strategy (RTS) games. In RTS games, the primary objective of the game is to build an army strong enough to destroy the opponent base without getting ∗ Corresponding author. Tel.: +65-6790-6448 ; fax: +65-6792-6559. E-mail address: [email protected] Available online at www.sciencedirect.com © 2013 The Authors. Published by Elsevier B.V. Selection and peer-review under responsibility of the Program Committee of IES2013 Open access under CC BY-NC-ND license. Open access under CC BY-NC-ND license.
Transcript of Towards Believable Resource Gathering Behaviours in Real ... · aMulti-plAtform Game Innovation...

Procedia Computer Science 24 ( 2013 ) 143 – 151
1877-0509 © 2013 The Authors. Published by Elsevier B.V.Selection and peer-review under responsibility of the Program Committee of IES2013doi: 10.1016/j.procs.2013.10.037
ScienceDirect
17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013
Towards Believable Resource Gathering Behaviours in Real-time
Strategy Games with a Memetic Ant Colony System
Xianshun Chena, Yew Soon Onga,∗, Liang Fenga, Meng Hiot Limb, Caishun Chena,Choon Sing Hoa
aMulti-plAtform Game Innovation Centre (MAGIC), School of Computer Engineering, Nanyang Technological University, SingaporebSchool of Electrical and Electronic Engineering, Nanyang Technological University, Singapore
Abstract
In this paper, the resource gathering problem in real-time strategy (RTS) games, is modeled as a path-finding problem where game
agents responsible for gathering resources, also known as harvesters, are only equipped with the knowledge of its immediate sur-
roundings and must gather knowledge about the dynamics of the navigation graph that it resides on by sharing information and
cooperating with other agents in the game environment. This paper proposed the conceptual modeling of a memetic ant colony
system (MACS) for believable resource gathering in RTS games. In the proposed MACS, the harvester’s path-finding and resource
gathering knowledge captured are extracted and represented as memes, which are internally encoded as state transition rules (mem-
otype), and externally expressed as ant pheromone on the graph edge (sociotype). Through the inter-play between the memetic
evolution and ant colony, harvesters as memetic automatons spawned from an ant colony are able to acquire increasing level of
capability in exploring complex dynamic game environment and gathering resources in an adaptive manner, producing consistent
and impressive resource gathering behaviors.
c© 2013 The Authors. Published by Elsevier B.V.
Selection and peer-review under responsibility of the Program Committee of IES2013.
Keywords: Memetic Computing; Ant Colony; Resource Gathering; Path Finding
1. Introduction
With the advancements in graphics and physics engines reaching the stage of maturity, game researchers are now
turning to artificial intelligence (AI) as an increasingly influential factor for enhancing the quality of user experiences
and furthering the growth of game innovation and believability. At the same time, due to the dynamic nature and
complexity of digital games, many challenges in the field have posed as interesting problems that can be addressed
using artificial intelligence and computational intelligence (CI) technologies. One of these challenges is the dynamic
path-finding and resource gathering problem commonly found in real-time strategy (RTS) games. In RTS games,
the primary objective of the game is to build an army strong enough to destroy the opponent base without getting
∗ Corresponding author. Tel.: +65-6790-6448 ; fax: +65-6792-6559.
E-mail address: [email protected]
Available online at www.sciencedirect.com
© 2013 The Authors. Published by Elsevier B.V.Selection and peer-review under responsibility of the Program Committee of IES2013
Open access under CC BY-NC-ND license.
Open access under CC BY-NC-ND license.
144 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
overrun by the enemies. In order to do that, players are supposed to build and strengthen their base by purchasing
various upgrades and soldiers using the available game resources provided. Efficiency in gathering these scarce and
limited resources is often one of the key factors that determines the eventual outcome of the game, especially when
the location of these game resources are not known beforehand since they are often are randomly generated. This can
be a challenging task for AI if the computer controlled players, often known as a bots, were to play on equal grounds
with the human players, meaning to say that the bots are not equipped with complete information on the locations
of the resources. Rather, they have to explore the map extensively in order to locate the resources. While players
have come to expect increasing levels of AI sophistication in the resource gathering and path-finding behaviors, the
modern commercial game environments for RTS games are becoming frequently non-deterministic with imperfect
knowledge and a large number of rather dynamic variables. Furthermore, the dynamic path-finding and resource
gathering behaviors in these games have to deal with the vast number of game agents frequently as well as the time
synchronization among them in a large-scale persistent game world with the use of intensive computational resources.
Consequently, dynamic path-finding and intelligent gathering of arbitrarily valued resources in RTS games represent
a fundamental problem of high complexity, and with potential merits if appropriately addressed1.
RTS games with particularly innovative AI for dynamic path-finding and resource gathering can stand out among
competitors. Such innovative AI is related to the general principle of believability. As discussed in2, believable agent
is described as one that provides the illusion of life, and thus permits the audience’s suspension of disbelief. A be-
lievable agent is usually characterized with human-like peculiarities, such as the capabilities to learn, to cooperate,
to make mistakes, to adjust its own strategy in response to the opponent’s actions. In this work, the RTS resource
gathering problem to be solved here is first defined as a path-finding problem, while game agents that are responsible
for gathering the resources shall be referred to as harvesters in this paper. It is assumed that harvesters have very
limited knowledge of the digital game world, apart from its immediate or local surroundings. In contrast to the A-
Star search, which requires complete information of the navigation graph and essentially cheats to know the resource
location ahead of time, the harvester bots must now explore and discover resource locations by sharing information
and cooperating with other harvesters in its surroundings. This clearly puts the harvester bots in more equal footings
with the human players in the game play, hence providing greater believability in the resultant RTS game. Achieving
cooperative behavior is often difficult, as maintaining shared information about the dynamics of agents in the game
world can be complex. One approach is via explicit planning and search3,4, which has been used to tackle the cooper-
ative path-finding problem that require multiple agents to follow non-interfering paths from the current states to their
respective goal states. The approach is however computationally expensive, though well-suited for handling complex
navigation problems where movement is constrained. An alternative approach is based on swarm intelligence and
the flow-field techniques. Among such an approach is the direction map proposed in5,6, which presents a distributed
approach whereby agents share information about the direction in which they traveled when passing through each
checkpoint. The information on each checkpoint then serves to encourage agents that pass through the same location
to travel in the same direction as past agents. The Ant Colony Optimization (ACO) proposed in1 is another example
on the use of swarm intelligence for RTS resource gathering. The distributed nature of swarm intelligence is well
suited for maintaining shared information about the dynamics of agents in the game world. Nevertheless, the ap-
proach is slow in converging to the best path-finding solution as they are poor in efficiently concentrating around the
best path-finding solutions. As a result, harvesters may be spending lots of time wandering and looking silly before
they concentrate on the optimal paths1. One other limitation of such computational intelligence method is that its
performance is highly sensitive to parameter tuning and hence leading to undesirable path-finding behaviors when
the navigation graph is highly dynamic in nature, which is not acceptable to game developers. Furthermore, the cur-
rent swarm-based cooperative path-finding approach including5,6,1 are not designed for game environments that are
based on navigation mesh7, which have become the search space representation of choice for path-finding in digital
games8,9.
In this paper, our interest is on the social behavior of harvester bots in RTS resource gathering tasks. In particular,
we propose a Memetic Ant Colony System (MACS) for facilitating believable resource gathering behaviors on naviga-
tion graph in real-time strategy games. In the proposed system, the harvesters (i.e., ants) leave their base location (i.e.,
the ant colony nest), seek resources and drop pheromone on the way back to the nest. By following pheromone trails,
the harvesters are assured a path to resources and back home. The more ants that travel the path with resources found,
the stronger the pheromone grows1. While this path-finding search framework is based on Ant Colony Optimization
145 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
(ACO) and similar to that in1, our proposed approach differs in three core manner. Firstly, in contrast to1, our path-
finding task focuses on navigation graphs, which is the typical search space representation for path-finding in digital
games8,9. Secondly, an individual learning phase in the form of a partial A-Star search is carried out by the harvester
whenever resources is located, which enhance the colony in converging to the best path-finding solutions more effi-
ciently. Third, memetic computation10, specifically memetic automaton and the process of imitation, are integrated
with the ant colony learning mechanism to form a meme-centric framework that adapts agents’ behaviors according to
the dynamics of the navigation graph. This effectively eliminates the need for tedious parameter fine-tuning in ACO
search framework.
Memetic computation is a paradigm that uses the notion of meme(s) as units of information encoded in compu-
tational representations for the purpose of problem-solving10,11,12. Meme(s) on its own is perceived as a form of
structured knowledge, for example, in the form of recurrent patterns. The proposed MACS is a meme-centric Ant
Colony System (ACS) framework in which the harvester’s path-finding and resource gathering knowledge captured
are extracted and represented as memes, which are internally encoded as the state transition rules (internal logic or
memotype) and externally expressed as ant pheromone on the graph edge (behavior or sociotype). The memotypesexist within the mind universe of a harvester and serves as the internal logics used by the harvester in selecting the
next edge to travel when it reaches a particular junction of the navigation map. On the other hand, the sociotypesare
expressed as the resultant pheromone deposited on the traveled edges by the harvester. These scents are then picked
up by other harvesters subsequently reaching the same location, which may then imitate the previous harvester’s be-havior in selecting the next edge. While the sociotypes are being evolved by pheromone evaporation and deposition
process within the Ant Colony System, the memetic evolution takes place at the same time within the harvesters’s
mind universe, whereby memotypes undergo selection, transmission and variation. Through the inter-play between
the memetic evolution and ant colony, harvester bots or more precisely memetic automaton, are able to acquire in-
creasing level of capability in exploring complex dynamic game environment and gathering resources in an adaptive
manner, producing consistent and impressive resource gathering behaviors11,13.
The rest of the paper is organized as follows: Section 2 begins with the detailed description of the RTS resource
gathering problem to be solved in which harvesters are only equipped with the knowledge of its immediate sur-
rounding. Subsequently, Section 3 discusses the design of the Memetic Ant Colony System, focusing on the core
contributions towards facilitating believable resource gathering behaviours in RTS games, namely, memetic represen-
tation, ACS and individual learning, as well as memetic evolution. In Section 4, the empirical assessment of MACS is
considered. Empirical results obtained show that MACS producing consistent and impressive resource gathering be-
haviors even when the harvesters are only given the limited knowledge of its immediate surroundings during resource
gathering. Finally, the last section ends with a brief conclusion of the presented research.
2. RTS Resource Gathering Problem
Resource gathering is arguably one of the most fundamental AI task in RTS games. In the resource gathering
problem we defined here, the harvester is only given the knowledge of its immediate surrounding. Suppose that the
navigation graph is denoted as G = (V, E), which consists of a set of vertices, V = {vi} and a set of edges E = {ei j} in
which an edge ei j = (vi, v j) connect vertices vi and v j. We denote Gk(t) ⊂ G as the partial graph visible to harvester
agt(k) at time step t, and we further denote Ei = {ei j|ei j = (vi, v j), ei j ∈ E, v j ∈ V} and Vi = {v j|v j ∈ ei j, ei j ∈ Ei}as the set of edges and vertices connecting to the vertex vi. When harvester agt(k) reaches vertex vi at time step t,its visibility only extends up to Vi, Ei, i.e., Gk(t) = (Vi, Ei). With such a limited visibility, the harvester agt(k) must
gather knowledge about the graph structure of the navigation map on which it explores by sharing information and
cooperating with other harvesters in the game environment.
A harvester is only given the knowledge of its immediate surroundings in resource gathering. This constraint is
important from the practical point of views in the context of RTS games. Firstly, modern game environments are
becoming frequently nondeterministic with imperfect knowledge and large numbers of quite dynamic variables14,15,
e.g. the obstacles may change location such as sudden destruction of a bridge, and the resources and navigation mesh
may also change dynamically. As a result, the creation of an AI resource gathering subsystem must be designed with
minimum use of the preprocessed information (e.g. the full visibility of the entire navigation graph) in order to handle
a fully dynamic navigation graph that deal with fast changes. Secondly, the dynamics of the world should also take

146 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
into account that the game agents can change the states of the world, e.g., a resource location may become depleted
due to harvesters gathering resources from it, or soldier units causing the terrain to change after bombardment on a
piece of land. Moreover, a game scene can have many thousands of moving objects at peak times15, the resource
gathering behaviors in RTS games have to frequently handle the vast number of game agents as well as the time syn-
chronization among them in a persistent game world which can undergo large-scale physical change affecting dozen
to hundreds of characters. In addition, modern RTS usually features large-scale navigation graph that may undergo
large physical change as well. Consequently, from the consideration of computational efficiency, it is important to
minimize the amount of information to be processed by a single harvester during resource gathering, which can be
done by processing only the local navigation knowledge. Thirdly, the desired illusion of intelligence manifests best
when game agents emulate the behavior of a human player. That is, believable resource gathering behaviors of the
harvester should be imperfect to a degree, being either fun and beatable or perhaps simply irrational, as human beings
often are. The seemingly simple aspect of seeking and returning resources takes on new meaning in RTS games when
now the computer controlled players have to play on equal grounds as a human player, without cheating and equipped
with the same amount of incomplete map information.
3. Memetic Ant Colony System
In this section, we introduce the proposed memetic ant colony system for RTS resource gathering problem. In each
generation g, a colony of ants (i.e., harvesters) is generated, in which each harvester agt(k) carries a path memory Gk
and a tabu list tl(k). The path memory Gk records the edges and vertices that agt(k) traveled up to the current time
step and the tabu list tl(k) records the edges recently traveled by agt(k). agt(k) also carries its memotype M(k), which
encodes a set of state transition rules that determine which edge ei j to travel next when it reaches vi.
The harvesters start by moving out of their base location v0 (i.e., the ant colony nest) in search of resources. As
each harvester agt(k) has only a limited sight range Gk(t) = (Vi, Ei) when it reaches vi, the harvester must make use of
its available memotype M(k) to analyze the sociotype memes available in its surroundings. These sociotype memes
have been deposited as pheromone on the edges Ei by other harvesters previously passing over vi. agt(k) then imitates
the behavior of the harvesters who have successfully found a resource location or explore as far as possible to search
for resources. After agt(k) passes over ei j, it expresses a sociotype meme into the pheromone trail τi j on ei j and update
its tabu memory tl(k) to include ei j, so that harvesters can avoid potentially dangerous paths or paths that have been
recently traveled by other harvesters or itself, based on the pheromone that is laid on the edges as well as its tabu
memory tl(k).
After a harvester agt(k) successfully finds a resource location vI , the fitness of M(k) is increased by 1, i.e.,
f itness(k) = f itness(k) + 1. Subsequently, an individual learning is performed in which agt(k) pathfinds the shortest
path Pbest(v0, vI) from v0 to vI using partial A-Star search on its path memory Gk, while sociotype memes are then
deposited as pheromone on the edge set {ei j|ei j ∈ Pbest(v0, vI)}. Periodically, the pheromone on the edges traveled
by all harvesters are evaporated to encourage the harvesters in selecting paths that will lead them to already found
resource locations as well as to encourage them in exploring edges that have not yet being uncovered, in the hope of
finding new additional resources.
At the same time, when harvesters perform the ACS-like resource gathering activity, harvesters self-configure their
memotype encoded transition rules by subjecting them in a memetic evolutionary cycle, where memotype undergo
meme selection, transmission and variation in the harvester’s mind universe according their fitness.
The MACS search scheme include three key aspects: i) The memotype and sociotype representations of memes in
the MACS, ii) the ACS and A-Star individual learning mechanisms that promote the imitation of sociotype memes
among harvesters, and iii) the memetic evolution mechanisms that govern the evolution of memotype encoded state
transition rules.
3.1. Memetic Representation
In memetic computation, the memotype representation refers to knowledge or memes internal to the mind universal
of an harvester, while sociotype refers to the social expression of a meme. In the proposed MACS, sociotype is
expressed in the form of pheromone τ(r, s) that is deposited on the edge (r, s). On the other hand, the memotype

147 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
representation of memes encode the state transition rules to provide a direct way in balancing between exploration
of new edges and exploitation of a priori and accumulated knowledge about the path-finding to known resource
locations. Structurally, the memotype representation M(k) is a continuous-value string that encodes the following
state transition rules:
M(k) = Tk ρ lk Q0 amin bmin
where Tk is the tabu tenure (i.e. the max length) of the tabu list tl(k) carried by harvester agt(k), rho is the local
pheromone update parameter for agt(k) to express its sociotype memes into the pheromone trail on the edge it just
traveled. lk is the lifetime of agt(k), Q0 is a parameter that balances between exploitation and exploration in the state
transition rules. amin and bmin are inhibit parameters that discourage harvesters from traveling to vertices that have
been recently traveled by the harvester or potentially dangerous (e.g., obstacles ahead).
The memotype and sociotype memes in MACS work in a complementary nature. Memotype are internal logic
blocks of an harvester when making decision on path-finding, while the sociotype are behaviors expressed by har-
vesters which are transmitted to other harvesters via pheromone. When reaching a vertex r, harvester agt(k) may
decide to imitate a particular successful harvester agt(l) previously passing this vertex, and select the edge agt(l) has
traveled. The behavior imitation is accomplished via the memotype state transition rules and sociotype pheromone
information as follows: a harvester agt(k), whose current visited vertex is r, chooses the next vertex s from its sur-
rounding vertices V(r) = {μ|(r, μ) ∈ E} to move by applying a set of state transition rules. If V(r) contains a resource
location vI , then s = vI . Otherwise s is selected from V(r) using the pseudo-random-proportional rule:
s ={
arg maxμ∈V(r) P(μ) if p ≤ Q0;
S if p > Q0.(1)
In Eqn. 1, P(μ) denote the preference for selecting vertex μ ∈ V(r), p is a random number that is uniformly
distributed in (0, 1] and Q0 is taken from M(k). If p ≤ Q0, the pseudo-random-proportional rule favors exploitation (sis chosen as the vertex such that edge (s, r) is the edge on which the preference P(μ = s) is the highest). If p > Q0,
the algorithm favors exploration and s is assigned a random variable S selected with the probability P(S , r):
P(S , r) =P(S )∑
u∈V(r) P(u)(2)
Eqn. 2 is known as the random-proportional rule in that it favors transitions toward vertices having higher prefer-
ence P(μ).For each neighboring vertex μ ∈ V(r), its preference P(μ) is given by:
P(μ) =
{τ(r, μ) μ � tl(k)
τmin ∗ amin μ ∈ tl(k)(3)
where τ(r, μ) is the pheromone on the edge (r, μ), and τmin is the minimum pheromone value. 0 ≤ amin ≤ 1 is from
M(k). Eqn. 3 discourages the harvester agt(k) from selecting a vertex that is in its tabu list tl(k).
The state transition rules in Eqns. 1, 2, 3 for resource gathering differ from that of the ACS state transition rules
in traditional TSP path planning in that there is a probability that the harvester agt(k) will revisit a vertex which it
has visited in the past, so as to explore its neighboring vertices again in hope of discovering a resource location.
Furthermore, it does not assume a fully connected graph as in TSP path planning.
Initially, the pheromone level of any edge not traveled by any harvester is assumed to have a pheromone level of
τ0. After agt(k) travels the edge (r, s), it expresses its temporal presence at the edge (r, s) via pheromone update as
given by:
τ(r, s)← (1 − ρ) · τ(r, s) + ρ · τ0 (4)
where the local decay parameter 0 < ρ < 1 is taken from the memotype M(k) of harvester agt(k). If agt(k) dies as
a result of an ambush at vertex s, it also communicates this acknowledgement on edge (r, s) via the pheromone update
as given by:
τ(r, s)← τmin ∗ bmin (5)

148 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
where the pheromone inhibit parameter 0 < bmin < 1 is taken from the memotype M(k) of harvester agt(k).
Eqns. 4 and 5 allow harvester to share knowledge via sociotype meme expression in terms of pheromone changes
on the edge. Thus subsequent harvesters can avoid paths potentially dangerous, or recently traveled by other harvesters
or by itself.
3.2. ACS and Individual Learning
Here we detail the Ant Colony System (ACS) process of pheromone evaporation and deposition as well as the
individual learning involved in the resource gathering. After an harvester agt(k) successfully finds a resource location
vI , the path-finding knowledge or sociotype meme can be transmitted to other harvesters via the global pheromone
update, in which agt(k) raises the pheromone level on the traversed edges stored in its path memory Gk. However,
agt(k) may have to take many unnecessary twist and turns during its search for the resource location. Thus it is
important to locally refine its path memory Gk. The local refinement is performed through an individual learning
stage in which agt(k) path finds the shortest path Pbest(v0, vI) from v0 to vI using partial A-Star search on its path
memory Gk. The A-Star search is partial as it is only restricted to the partial graph represented by Gk. Sociotype
memes are then deposited as pheromone on the edge set {(r, s)|(r, s) ∈ Pbest(v0, vI)}, using the global update rule as
given by:
τ(r, s)← τmax∀(r, s) ∈ Pbest(v0, vI) (6)
where τmax is the maximum pheromone level.
Periodically, the pheromone on the edges traveled by all harvesters are evaporated, to encourage the harvesters in
selecting paths that will lead them to the found resource locations
τ(r, s)← (1 − α) ∗ τ(r, s),∀(r, s) ∈ Gk,∀k (7)
It is worth noting that Eqn 7 only applies to edges that have been traversed by the harvesters, while the pheromone
level of any untraversed edge is maintained at τ0. This is to encourage harvesters in exploring edges that have not
covered in the hope of finding more resources, particularly when the current resources found have been depleted or
when the previously found paths to the resource locations are blocked.
3.3. Memetic Evolution
Many of the parameters within the memotype memes of an harvester specify the behavior of the state transition
rules during path-finding. The role of memetic evolution is to auto-tune the behavior of the state transition rules so
that the harvester can self-adapt to the dynamics of the navigation graph. The memetic evolution inter-plays with
the ACS resource gathering described in Subsections 3.1 and 3.2. In the lifetime of an harvester agt(k), each time
it successfully finds a resource location, the fitness f itness(k) of its currently associated memotype meme M(k) is
increased by 1, i.e., f itness(k) = f itness(k) + 1. This gives rise to a selection pressures among the memotype memes
residing in the meme pool constituting memotypes memes being used by harvesters. In a memetic evolution cycle,
these memotype memes undergo meme selection, transmission and variation according their fitness f itness(k), which
give rise to the new generations of memotype memes. In our current implementation, a binary tournament selection
scheme is used to select the memotype memes either for path-finding or memetic reproduction. Redcliff Blending
is used for memetic transmission in which a new meme is produced by inheriting properties from its parent memes.
With respect to the memetic variation process, a normal distribution mutation is applied to heuristically modify the
memetic materials.
The memetic evolution allows harvesters to adapt their state transition rules to the dynamics of a game world which
can undergo fast and large-scale physical change affecting dozen to hundreds of game agents, by balancing between
exploitation and exploration on the navigation graph.
4. Empirical Study
In this section, we evaluate the proposed memetic ant colony system for resource gathering on a simulated RTS
environment, which is depicted in Fig. 1. In the simulated environment, the graph for resource gathering is randomly

149 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
Obstacle
Start Point
Supply Point (Resource)
AntExplored Edge
Capacity Bar
Fig. 1. Memetic Ant for Resource Gathering.
Table 1. Summarization of parameter configurations in plentiful supply, medium supply and little supply.
Supply Point Obstacle Memetic AntsPlentiful Supply 20 5 20
Medium Supply 10 10 20
Little Supply 5 20 20
generated. We can configure the number of start point, obstacles, supply points (resource) and ants at the right plane
as shown in Fig. 1. Each supply point has a capacity as shown on its top, and the capacity bar will become empty
when the supply point has been exhausted. The edge with highlighted color denotes the path that has been explored
by the memetic ants. More importantly, the whole structure of the generated graph is non-familiar to the memetic
ants, and only the immediately surrounding information is available to the respective memetic ants.
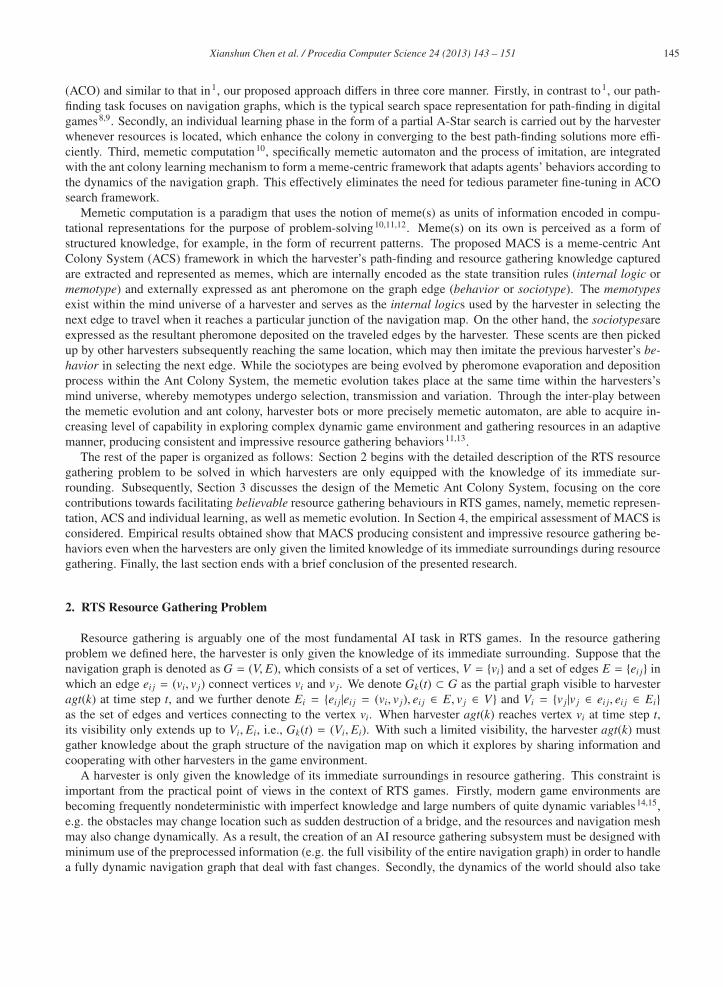
Further, three scenarios of resource gathering, namely plentiful supply, medium supply and little supply are studied
in this experiment. In particular, for plentiful supply, extensive supply points are available to the memetic ants, and
little obstacles existed on the graphs. Medium supply has equal size of supply points and obstacles on the navigation
graph, while little supply holds lots of obstacles in the navigation graph but little supply points available to the memetic
ants. The detailed parameter configuration of each scenario is summarized in Table 1. Fig. 2 presents the navigation
graph and respective distribution of supply points and obstacles in each resource gathering scenario considered. Since
the number of memetic ants is kept fixed in all the three scenarios, the difficulty of resource gathering task increases
from plentiful to little supply.
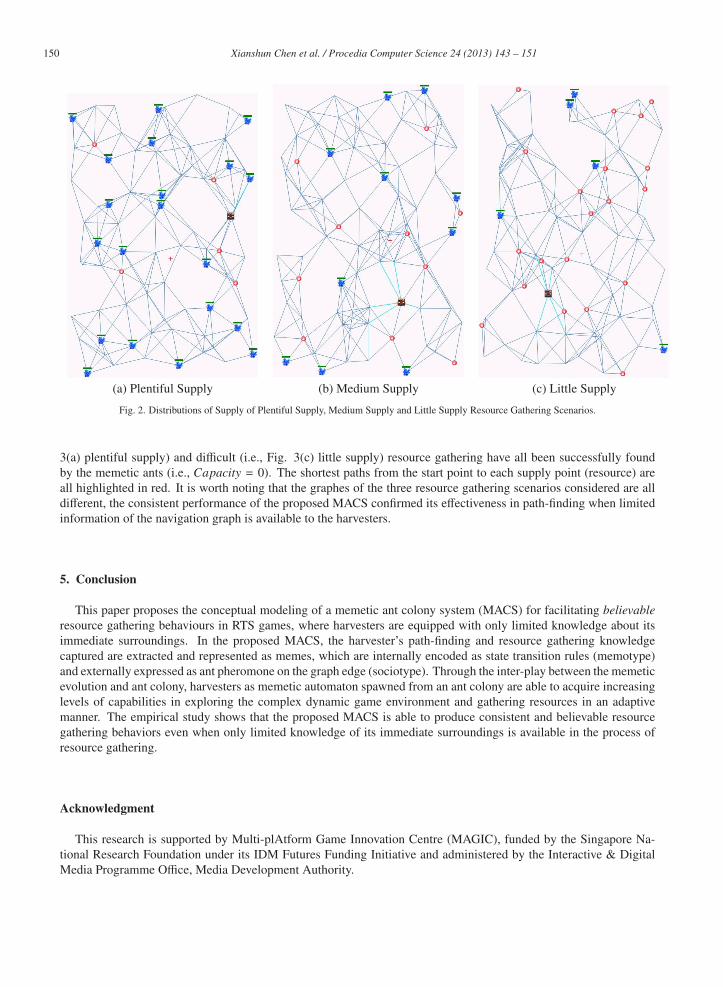
All the simulated results of the proposed memetic ant colony system on plentiful supply, medium supply and little
supply resource gathering scenarios are presented in Fig. 3. As can be observed, the resources in both easy (i.e., Fig.
150 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
(a) Plentiful Supply (b) Medium Supply (c) Little Supply
Fig. 2. Distributions of Supply of Plentiful Supply, Medium Supply and Little Supply Resource Gathering Scenarios.
3(a) plentiful supply) and difficult (i.e., Fig. 3(c) little supply) resource gathering have all been successfully found
by the memetic ants (i.e., Capacity = 0). The shortest paths from the start point to each supply point (resource) are
all highlighted in red. It is worth noting that the graphes of the three resource gathering scenarios considered are all
different, the consistent performance of the proposed MACS confirmed its effectiveness in path-finding when limited
information of the navigation graph is available to the harvesters.
5. Conclusion
This paper proposes the conceptual modeling of a memetic ant colony system (MACS) for facilitating believableresource gathering behaviours in RTS games, where harvesters are equipped with only limited knowledge about its
immediate surroundings. In the proposed MACS, the harvester’s path-finding and resource gathering knowledge
captured are extracted and represented as memes, which are internally encoded as state transition rules (memotype)
and externally expressed as ant pheromone on the graph edge (sociotype). Through the inter-play between the memetic
evolution and ant colony, harvesters as memetic automaton spawned from an ant colony are able to acquire increasing
levels of capabilities in exploring the complex dynamic game environment and gathering resources in an adaptive
manner. The empirical study shows that the proposed MACS is able to produce consistent and believable resource
gathering behaviors even when only limited knowledge of its immediate surroundings is available in the process of
resource gathering.
Acknowledgment
This research is supported by Multi-plAtform Game Innovation Centre (MAGIC), funded by the Singapore Na-
tional Research Foundation under its IDM Futures Funding Initiative and administered by the Interactive & Digital
Media Programme Office, Media Development Authority.

151 Xianshun Chen et al. / Procedia Computer Science 24 ( 2013 ) 143 – 151
Capacity = 0
Shortest Path
Capacity = 0
Shortest Path
Capacity = 0
Shortest Path
(a) Plentiful Supply (b) Medium Supply (c) Little Supply
Fig. 3. Paths found by The Proposed Memetic Ant Colony System in Plentiful Supply, Medium Supply and Little Supply Resource Gathering
Scenarios.
References
1. J. Dunn, Ant colony organization for mmorpg and rts creature resource gathering, AI Game Programming Wisdom 3 (2005) 495–505.
2. I. Umarov, M. Mozgovoy, Believable and effective ai agents in virtual worlds: Current state and future perspectives, International Journal ofGaming and Computer-Mediated Simulations (IJGCMS) 4 (2) (2012) 37–59.
3. T. S. Standley, R. E. Korf, Complete algorithms for cooperative pathfinding problems, in: IJCAI 2011, pp. 668–673.
4. D. Silver, Cooperative pathfinding, AI Game Programming Wisdom 3 (2005) 99–111.
5. R. Jansen, N. Sturtevant, A new approach to cooperative pathfinding, in: Proceedings of the 7th international joint conference on Autonomousagents and multiagent systems - Volume 3, AAMAS ’08, International Foundation for Autonomous Agents and Multiagent Systems, Richland,
SC, 2008, pp. 1401–1404.
6. M. R. Jansen, N. R. Sturtevant, Direction maps for cooperative pathfinding., in: AIIDE’08, 2008, pp. –1–1.
7. G. Snook, Simplified 3d movement and pathfinding using navigation meshes, Game Programming Gems, (2000) 188–204.
8. C. McAnlis, J. Stewart, ntrinsic detail in navigation mesh generation, Game Programming Wisdom 4 (2008) 95–112.
9. D. Hamm, Navigation mesh generation: An empirical approach, Game Programming Wisdom 4 (2008) 113–123.
10. X. Chen, Y.-S. Ong, M.-H. Lim, K. C. Tan, A multi-facet survey on memetic computation, IEEE Trans. Evolutionary Computation 15 (5)
(2011) 591–607.
11. Y. S. Ong, M. H. Lim, X. S. Chen, Research frontier: Memetic computation - past, present & future, IEEE Computational IntelligenceMagazine 5 (2) (2010) 24–36.
12. L. Feng, Y. S. Ong, I. W. H. Tsang, A. H. Tan, An evolutionary search paradigm that learns with past experiences, IEEE World Congress onComputational Intelligence, Congress on Evolutionary Computation, 1 – 8.
13. L. Feng, Y. S. Ong, A. H. Tan, X. S. Chen, Towards human-like social multi-agents with memetic automaton, IEEE Congress on EvolutionaryComputation (2011) 1092–1099.
14. P. Marden, F. Smith, Dynamically updating a navigation mesh via efficient polygon subdivision, Game Programming Wisdom 4 (2008) 83–94.
15. R. Axelrod, Navigation graph generation in highly dynamic worlds, AI Game Programming Wisdom 4 (2008) 125–141.


















