The Rod Pumping - System Design

of 37
-
Upload
doubleuland -
Category
Documents
-
view
221 -
download
0
Transcript of The Rod Pumping - System Design
-
7/26/2019 The Rod Pumping - System Design
1/37
-
7/26/2019 The Rod Pumping - System Design
2/37
rods and surface euipment. 2n the other hand, if a small plunger is selected and it must pump at high rates ofspeed in order to achieve the necessary production, then, the inertial effects of the movement of the rods andpump will cause increased peak loads on the euipment. There is an optimal selection, then, of the plungerdiameter, stroke length and pump speed for a given production rate. +e shall begin our selection procedure byconsidering the optimum pump plunger si3e and then, proceed to the other two variables.
InTable (is shown the optimal plunger si3e to use for a desired surface production rate for well depths to 4,###
ft.
Table 1
This table is given for pumps operating at an assumed efficiency of 1#). It is based upon an internal report of
5ethlehem Steel 6ompany. for a surface production of (## 5!, for e'ample, the reuired plunger si3e is in therange of ( (7 to ( (& inches. Note that the range increases by (7 inch for every (## bbls of additionalproduction reuired at the surface. /or 7## 5!, then, a plunger si3e of & to & (7 inches is reuired.
2nce the optimal plunger si3e has been determined, the manufacturers catalogue is consulted to select the pumptype and tubing si3e that will accommodate that particular plunger. 8 typical manufacturers recommendation is
given inTable &.
http://figurewin%28%27../asp/graphic.asp?code=771&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=3%27,%273%27) -
7/26/2019 The Rod Pumping - System Design
3/37
Table 2
9nowing the plunger diameter, there remains only two variables that must be determined for an optimal pumpdesign, specifically, the stroke lengthand the pump speed. 5oth can be obtained by referring to typical charts
published by pump manufacturers. 2ne such chart is shown in /igure (.
http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27) -
7/26/2019 The Rod Pumping - System Design
4/37
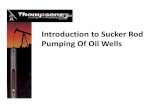
Figure 1
Note that the stroke length, in inches, is plotted on the vertical scale, and the ma'imum speed permitted by rodfall, in strokes per minute, is plotted on the hori3ontal scale. The line drawn on the chart represents thema'imum practical limit of both stroke length and rod speed, which will allow the rod sufficient time to freefallthrough the fluid on the downstroke. The rods should be allowed to freefall so as to avoid e'cessive stress on thepolished rod clamp and hangar bar on the downstroke. Therefore, a stroke length and pump speed which fallsbelow the line must be selected. This selection procedure can be shown by referring to an e'ample: +e assumethat the desired surface production rate is 7## 5!, the pump efficiency is 1#), and the plunger diameter ;!< is& inches. The stroke efficiency ;s
-
7/26/2019 The Rod Pumping - System Design
5/37
S = stroke length at surface, inches
N = pump speed, strokemin
5y rearranging . & and substituting the specific values into the above euation, we obtain a relationship for SN:
str$e9inchesminWe n$% inc$rp$rate this pr$duct int$ the str$e len&th "ersus maimum speed chart (i&ure 1).t de#ines a line $n the chart %hich %ill satis#/ this speci#ic pump desi&n. ;n/ p$int al$n& the line,SN = 1,262, %ill de#ine an acceptale str$e len&th and speed. he p$int %here this lineintersects the maimum practical limit line su&&ested / the manu#acturers is at a str$e len&th $#a$ut '* inches and a pump speed $# a$ut 2 str$esmin. (his pump speed is s$me%hathi&her than n$rmal). We %$uld use a pump desi&n speci#icati$n $#:
D = 2 in
S = 74 in
N = &1 S$%
as a #irst appr$imati$n in desi&nin& the alance $# the r$d pump s/stem.
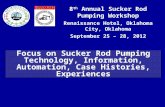
It should be noted that the above design procedure is not absolute. 8 number of wells have operated veryefficiently at pump speeds above the designated ma'imum. -ocal e'perience will provide the practical knowledgeneeded to modify design parameters. >emember, the plot in /igure (is for a conventional pumping unit. Similar
curves are to be found in/igure &
http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=1%27,%271%27) -
7/26/2019 The Rod Pumping - System Design
6/37
Figure 2
and/igure " for both the air balanced and %ar II units.
http://figurewin%28%27../asp/graphic.asp?code=771&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=771&order=2%27,%272%27) -
7/26/2019 The Rod Pumping - System Design
7/37
Figure 3
Rod Stress Calculations
In addition to the environment to which rods will be e'posed, it is important not to e'ceed the ma'imumallowable rod stress. In order to calculate the ma'imum rod stress, we use the %odified ?oodman euation or, asseen in many publications, the %odified ?oodman diagram. The %odified ?oodman euation is formulated asfollows:
S;= (0.2* < 0.*62* Smin) S ()
Where:S;= ma. all$%ale r$d stress, psi
T = min. tensile strength, psi
Smin= min. rod stress, psi
S/ = service factor.
he "ariales $n the ri&ht9hand side are $tained as #$ll$%s. is speci#ied #$r each ;P r$d&rade. # %e n$% the ;P &rade, %e ha"e a pulished "alue. #$r . he minimum r$d stress,
-
7/26/2019 The Rod Pumping - System Design
8/37
Smin, is either estimated #$r the pr$p$sed applicati$n $r measured directl/. t %ill e sh$%n later,that it is e5ual t$ the minimum p$lished r$d l$ad di"ided / the cr$ss9secti$nal area $# the r$d.
The service factor, S/, depends upon the environment in which the rods will be placed ;Table (
-
7/26/2019 The Rod Pumping - System Design
9/37
The tapered string may consist or as few as two and as many as four different si3erods ;/igure (
-
7/26/2019 The Rod Pumping - System Design
10/37
Table 1
The sample information given is for a 41C(&C tapered rod string. The first column
is the 8$I rod number designationD the second is the pump plunger diameter. Thethird, fourth and fifth columns refer to certain rod constants. The ne't two constants
show the percentages of each diameter rod that should be used in a tapered rodstring for this specific rod number designation.
/or e'ample, if we have a plunger diameter of (.#B inches, then, looking at the right
hand columns, we see that 77.B) of the string should consist of 41inch rods and44.7) of (&inch rods.
8lternatively, we might select 8$I rod number designation 04 for a (.#Binch plunger,
using the data shown in Table &, and find that &0) of the rod string should have
01inch rods, &0.7) have "7inch rods, and 74.B) have 41inch rods.
http://figurewin%28%27../asp/graphic.asp?code=773&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=773&order=3%27,%273%27) -
7/26/2019 The Rod Pumping - System Design
11/37
Table 2
The key to the 8$I procedure for designing pumping is one of trial and error. This
includes the design of sucker rod strings. +e first select a tapered rod string andcarry through the calculations to determine whether the ma'imum rod stress placed
on the rods e'ceeds the ma'imum limits for the class of rods used. If it does, then it
is necessary to select other rod number designations until you find one which willsatisfy the design limitation.
/or the (.#Binch diameter plunger we found twodesigns that might be used.6onverting the percent values to actual rod lengths, the first design for a 4,### ft
well would consist of &,&"# ft of 41inch rods above &,00# ft of (&inch rods.5ecause rods generally come in &4 ft lengths, these two numbers would be ad*usted
to &,&&4 and &,004 ft, respectively ;Table "
-
7/26/2019 The Rod Pumping - System Design
12/37
Table 3
/ollowing the same procedure for the second design, we would end up with (,"4# ftof 01inch rods at the top, followed by (,"04 ft of "7inch rods, and, below that,
&,&04 of 41inch rods ;Table "-, which is eual to the weight of the rods in air, minus thebuoyancy of the rods in the produced fluids, plus the weight of the fluid column supported by the plunger area,plus the effects of the inertial and acceleration forces on the rods. That is:
PP> = W 9 Br< $< (')Where:
http://figurewin%28%27../asp/graphic.asp?code=773&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=773&order=4%27,%274%27) -
7/26/2019 The Rod Pumping - System Design
13/37
W = %ei&ht $# r$ds in air, l
5r= buoyancy of rods in fluids, lb
/o= weight of fluid column, (b
I = effects of inertial and acceleration forces, lb.
?alculatin& the %ei&ht $# the r$ds in air is 5uite strai&ht#$r%ard. We #ind the a"era&e %ei&ht per#$$t $# r$ds #$r the speci#ic tapered r$d strin&, Wr, and multipl/ that / the t$tal len&th $# the r$dsin #eet, >. $r $ur #irst r$d desi&n, the a"era&e %ei&ht $# the r$ds is 1.*66 l#t, the len&th $# thestrin& is *,000 #t and s$ the %ei&ht $# the r$ds in air, W, is 7,0 l.
The second term, the buoyancy of rods in the produced fluids, is eual to the weight of the fluids that the rodsdisplace. It is eual to:
(*)Where:! = speci#ic &ra"it/ $# the pr$duced #luid, dimensi$nless
+ = weight of rods in air, lb
B&.7 = density of water, (bcu ft
711 = density of steel, lbcu ft.
# %e assume the densit/ $# $ur pr$duced #luids t$ e ** lcu #t, &i"in& a "alue $r 0. #$r !,then, usin& 45. *:
Br = (0.12)(0.)(7,0) = 2 l.
he %ei&ht $# the r$ds in #luid, Wr#
, is e5ual t$ the %ei&ht $# the r$ds in air minusthe u$/anc/e##ect $r:Wr# = W 9 Br = 7,0 9 2 = 6,+' l.
he %ei&ht $# the #luid c$lumn supp$rted / the net plun&er area, $, is e5ual t$ the densit/ $# thepr$duced #luid multiplied / the net plun&er area, multiplied / the hei&ht $# the static #luid le"el.he net plun&er area is e5ual t$ the area $# the plun&er, minus the area $# the r$ds. hesu&&ested ;P pr$cedure, h$%e"er, disre&ards the area $# the r$d in these calculati$ns. We shalld$ lie%ise.
$= ; @ (6a)
Where: = densit/ $# #luid, lcu #t
8 = area of plunger, s ft
@ = fluid level, ft
We ma/ m$di#/ this e5uati$n / $ser"in& that: = 62.'!
and
-
7/26/2019 The Rod Pumping - System Design
14/37
Where D s measured in nches. Aain& these sustituti$ns &i"es:
(6)
$r the sample case, ! is e5ual t$ 0., the plun&er diameter is 1.06 inches and %e assume thestatic #luid c$lumn hei&ht t$ e e5ual t$ the pump depth $# *000 #t. Sustitutin& the a$"e dataint$ 45. 6 &i"es:
$= (0.')(0.)(l.062)(*,000) 1,61 l.his, then, is the %ei&ht $# the #luid c$lumn.
+e may now calculate the first three terms of . 7 to yield a value of 1,B&A lb. The ma'imum polished rod loadis eual to this load plus the effects of the inertial and acceleration forces.
The behavior of the polished rod is very comple' and predicting the effect of these latter forces can be difficult.Not only does the rod string stretch and contract in response to a cyclic motion, which is not simple harmonic,but also to a crank and pitman motion which is different for each different type of pumping unit. In addition,because of the elasticity of the sucker rod system, stress waves run up and down the rod in response to thevarious forces that affect the rod.
There are several alternatives for including the effect of inertial and acceleration forces in the polished rod loads.The alternatives are, first, to make simplifying assumptions about the behavior of the rod and the pump motion.This has often been done in the past but is no longer being done today.
8 second option is to use empirical correlations that have been prepared on the basis of many repeatedobservations of pump behavior. This is the 8$I design procedure. It is based on the work done at the %idwest>esearch Institute where rod pumping systems were simulated on an analog computer. 5y simulating a wide
range of pumping conditions, the Institute was able to develop correlations which can be used to predict polishedrod loads.
8 third option that may be used to calculate rod loads is to solve the nonlinear partial differential euations whichrepresent the behavior of the rod string. ?ibbs, originally on his own and later with Neely at Shell 2il 6o., solvedthese euations in an effort to analy3e pump operation rather than pump design ;?ibbs, (AB"D and ?ibbs andNeely, (ABB
-
7/26/2019 The Rod Pumping - System Design
15/37
the string. The alternative dimensionless variable for pump speed is eual to . is the
freuency factor of the rod string. Note that:
= 1.0 #$r untapered r$d strin&s C 1.0 #$r tapered r$d strin&s.n the e"ent that an untapered r$d strin& is used, the t%$ dimensi$nless "ariales are e5ual.
+e may calculate values for these dimensionless variables as follows:
Where:N$ = natural #re5uenc/ $# the r$d strin&
8 = speed of sound in steel rods, ftmin
- = rod length, ft.
; is cust$maril/ &i"en a "alue $# 16,00 #tsec $r +7,000 #tmin.
+hen this value is substituted into the dimensionless variable, we obtain:
and
alues #$r the #re5uenc/ #act$r are #$und in the ;P tapered r$d strin& desi&n tales (P11>,
1+). N$te that #$r a &i"en $r assumed pump speed, r$d strin& len&th, and #re5uenc/ #act$r, a"alue #$r each $# these dimensi$nless "ariales can e calculated.
5efore doing so, we should understand the second dimensionless variable of importance, the dimensionless rod
stretch as /oSkr/o, as mentioned earlier, is the static fluid load in pounds. S is eual to the polished rod stroke
length, in inches, and kris the spring constant of the rod string. r, the reciprocal of krmultiplied by the rod
length, -, is also given in the 8$I tapered rod string design tables. Skrrepresents the load in pounds reuired to
stretch the rod string the length of the polished rod.
The dimensionless rod stretch term represents the rod stretch caused by the static fluid load, given as a fractionof the polished rod stroke length.
= r$d stretch as a #racti$n $# p$lished r$d str$e len&th$r eample, i# the term has a "alue e5ual t$ $ne, then, the r$d strin& %ill stretch an am$unte5ual t$ the len&th $# the p$lished r$d.
Note here again, that for a known or assumed polished rod stroke length, the value of this dimensionless variablemay be easily calculated.
-
7/26/2019 The Rod Pumping - System Design
16/37
2ne word of practicality at this point should be added. It has been observed by a number of specialists thatundertravel and overtravel of the pump plunger can be prevented if NNo does not e'ceed #."4, and /oSkrdoesnot e'ceed #.4#.
8s a result of the work done at the %idwest >esearch Institute, five correlations were published and are availablein 8$I >$((-. These five correlations, which rely on the two dimensionless variables for their presentation, areused to develop systematically the 8$I design procedure for a pumping unit.
The first three correlations affect the rod and downhole pump system, specifically, the plunger stroke length, thepeak polished rod load, and the minimum polished rod load. The last two correlations are used to calculate peaktorue and polished rod horsepower.
-et us learn how these correlations are used by applying them to our e'ample problem. The given data for thise'ample includes: a fluid level, @, and pump depth, -, of 4,### ft, a tubing si3e of (.A inches and the tubing isanchored. 8n 8$I sucker rod number 04, consisting of (,"4# ft of 01inch rods, (,"04 ft of "7inch rods, and&,&04 ft of 41inch rods is assumed to be sufficient for this design. These grade ! rods have a ma'imumallowable rod stress of "7,### psi. The plunger diameter, !, is (.#B inch, and we assume, for preliminary designpurposes, that the pump speed, N, is (B strokesmin and that the polished rod stroke length, S, is B7 inches. ?,the specific gravity of the pumped liuid, is #.11. +hen we substitute the above data into . (, using thepolished rod stroke length, S, as an estimate of the pump stroke length, we obtain a pump displacement of:
PD = (0.ll66)(6')(16)(l.06)2=1* BD.
his 5uic calculati$n sh$%s that these data %ill pr$"ide a pump displacement $# a$ut 1* BD.Esin& in#l$% per#$rmance calculati$ns, %e ha"e estimated pr$ducti$n #r$m $ur eample %ell t$ ea$ut 100 BD. he preliminar/ desi&n, then, sh$uld satis#/ the $3ecti"e $# 100 BD, e"en %henthe pump is d$%n #$r r$utine maintenance and luricati$n.
Plunger Stroke !orrelation
The first correlation shown in /igure (, is one which allows us to calculate the plunger stroke length.
http://figurewin%28%27../asp/graphic.asp?code=764&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=0%27,%270%27) -
7/26/2019 The Rod Pumping - System Design
17/37
Figure 1
2n the vertical a'is is the term SpS, the bottomhole plunger stroke length, divided by the polished rod stroke
length. This ratio reflects the effect of rod stretch on the effective plunger stroke length. 2n the hori3ontal a'is isthe dimensionless pump speed, NNo, the first dimensionless variable referred to earlier. 2n the graph are a
series of curves, each for a different value of the second dimensionless variable, /oSkr, the dimensionless rod
stretch. 5ecause the values of these two dimensionless variables are known, or can be calculated from the given
data, this correlation may be used to calculate a value for SpS.
/or the e'ample problem, NNois calculated as follows:
$r the selected tapered r$d strin&, cis e5ual t$ 1.1+1, and s$:
he dimensi$nless r$d stretch is e5ual t$ $Sr. ;s menti$ned earlier, $, the %ei&ht $# the #luid
supp$rted / the r$ds, is 1,61 l. S, the p$lished r$d str$e len&th in inches, is 6', and the
recipr$cal $# r, is e5ual t$ the elastic c$nstant, 4r #$r $ur r$d strin& multiplied / its len&th, > (i.e.
1r= 4r>). r$m ;P manual Pll>, %e $tain, 4r4r= 0.++7 10
96inl #t
and sustitute the n$%n "alue int$ the relati$nship #$r $ur dimensi$nless term:
-
7/26/2019 The Rod Pumping - System Design
18/37
here#$re, %ith this data, the dimensi$n9less r$d stretch is calculated t$ e 0.1. N$te that the"alues #$r $th NN0and 0Srd$ n$t eceed the limits $# 0.* and 0.*0 menti$ned earlier.
+ith known values for the two dimensionless variables, we turn to the correlation shown in /igure (. Starting on
the hori3ontal a'is with a value of NNoeual to #.&07, we move vertically to a point where /oSkreuals #.(".
/rom that point we move hori3ontally to the vertical a'is to find SpS = #.A1.
This term means that, if the tubing is anchored, as it is, the bottomhole plunger stroke length is eual to A1) ofthe polished rod stroke length at the surface. Specifically, for a polished rod stroke length of B7 inches, thebottomhole stroke length will be B&.0 inches.
If the tubing is not anchored, then we must subtract from this plunger stroke length an additional term, whichaccounts for the tubing contraction during the upstroke. This term is eual to:
uin& c$ntracti$n = 4t$>
Where:
4t= c$e##icient $# elasticit/ #$r the tuin&, in1 #t/o= weight of fluid on rods, (b
- = tubing length, ft.
$r 1.+9inch tuin&, it has a "alue $# 0.* 10 96inl #t. With $ e5ual t$ 1,61 l, and > e5ual t$*,000 #t, the plun&er str$e len&th, i# the tuin& is unanch$red, is reduced:
= (0.* 1096)(1,61)(*,000) = '.2 in.
n this case, the net plun&er str$e len&th %$uld e *.* inches.
Subsurface displacement can now be calculated. Esing the pump displacement e'pression developed in . ( andassuming that the tubing is anchored, we have:
PD = 0.1l66SpND2= (F.1l66)(62.7)(16)(1.06)2= 11 BD.
his m$re than meets the epected in#l$% rate $# 100 BD. n #act, it all$%s a$ut 208 d$%n9timeper da/ #$r maintenance. @$%e"er, had it n$t met the pr$ducti$n $3ecti"e, %e %$uld need t$re"ise the assumed pump data and repeat the calculati$ns. N$te that t$ calculate the pr$ducti$nrate at the sur#ace, %e must inc$rp$rate the pump e##icienc/ c$nsiderati$ns menti$ned earlier.
Peak Polihed Rod Load !orrelation
-et us turn now to the second 8$I correlation, one which allows us to calculate the peak polished rod load. It isshown in /igure &and, once again, we see the same dimensionless variables, whose values are known, plotted in
the same general locations.
http://figurewin%28%27../asp/graphic.asp?code=764&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=1%27,%271%27) -
7/26/2019 The Rod Pumping - System Design
19/37
Figure 2
In this case, the hori3ontal a'is is simply NNo. It is the vertical a'is which has now changed. In this case, it is
eual to /lSkr. The terms in the denominator are already familiar to us. Their values were calculated earlier. /l,
the only unknown, is referred to as the peak polished rod load factor, and may be obtained uite easily.
The dimensionless pumping speed, NNo, is eual to #."&B. The dimensionless rod stretch, /oSkr, is eual to
#.(". +ith these two known values we enter /igure &and find a value for / lSkrof #."0.
5ecause the value of Skris known it is possible to calculate /l. Note that /lis the term that we add to the weight
of rods in the produced fluids to give us a value for the peak polished rod load in pounds. It represents, then, twoterms: the weight of the fluid carried by the rods and the load caused by the inertialacceleration forces. Thepeak polished load, then, is eual to:
PP> = Wr#< l (7a)
Where:PP> = pea p$lished l$ad, 1
+rf= weight of the rods in fluid, (b
/(= weight of fluids on rods plus inertialacceleration forces, lb
Fr, in terms $# $ur c$rrelati$n:
http://figurewin%28%27../asp/graphic.asp?code=764&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=764&order=1%27,%271%27) -
7/26/2019 The Rod Pumping - System Design
20/37
(7)r$m the sample pr$lem, rememer that the %ei&ht $# the ;P G7* r$d strin& in the pr$duced#luids %as calculated t$ e 6,+' l. he sec$nd term is e5ual t$ 0.7. ;ll that is needed t$
calculate PP> is a "alue #$r Sr.
8gain, kr, the spring constant for the rod string, is eual to the reciprocal of the coefficient of elasticity of our rod
string, r, multiplied by the length of rods, -:
1r= (4r)(>)
(kr= ;#.AA0 ' (#B
--
-
7/26/2019 The Rod Pumping - System Design
21/37
Figure 3
/&is referred to as the minimum polished rod load factor.
2nce again, with a value of NN# on the hori3ontal a'is of #."&B, and a value of /oSkreuals #.(", we find the
point of intersection on the vertical a'is to be at #.&( ;/igure "
-
7/26/2019 The Rod Pumping - System Design
22/37
The counterweights are used to even out the load placed on the prime mover. 6onsider what would happen if acounterbalance effect were not provided at the polished rod. 2n the upstroke, the prime mover would have to doan enormous amount of work and an e'cessive torue would be e'erted on the gear reducer. This would reuirea large prime mover and a substantial gear reducer. 2n the downstroke, when the load on the polished rod issubstantially reduced, the prime mover would have little work to do, since the force of gravity pulls the rods andplunger downward. The counterweights, then, are added to the pumping unit to provide a counterbalance effectat the polished rod. This, in turn, reduces the si3e of the prime mover and provides a more even load to the gearbo'. The counterweights help the prime mover on the upstroke and, in turn, are lifted on the downstroke.
8n estimate of the CidealC counterbalance effect may be made for design purposes. It is one which will ensure
that the upstroke work of the prime mover is eual to the downstroke work. This also means that the net toruee'erted on the gear reducer will be appro'imately eual during each half of the pumping cycle. This, then, shouldbe our design ob*ective. To achieve it we calculate the ma'imum and the minimum loads on the polished rodduring the pumping cycle and then calculate their mean value. The mean value will be eual to:
Aean "alue = Wr#< 12 $Where:
Wr#= %ei&ht $# r$ds in #luid, l
/o= weight of fluid imposed on rods, lb.
he c$unteralance e##ect needed sh$uld e appr$imatel/ e5ual t$ the mean l$ad. $r ;Pdesi&n purp$ses, h$%e"er, the desi&n "alue $# the c$unteralance e##ect #$r the c$n"enti$nalpumpin& unit is sli&htl/ lar&er than this am$unt. n #act, it is 1.06 times lar&er than the mean l$ad.
?B4 = (1.06) (Wr#< 12 $). (+)Sustitutin& the data #$r $ur sample pr$lem int$ this e5uati$n, %e $tain:
his &i"es a t$tal c$unteralance e##ect $# ,2*6 1 t$ e satis#ied.
The counterbalance effect is reuired at the polished rod and it is transmitted there through the effect of thecounterweights acting on the connecting pumping unit members. In order to calculate the si3e of counterweights
needed to provide the desired counterbalance effect, a force balance around the various contributing structuralmembers is needed. This will include the effect of the geometry of the unit and its contribution to the
counterbalance effect. This information is provided by the manufacturers. /or a given pumping unit, pump strokelength, and desired counterbalance effect, the manufacturer will specify the types of counterweights to be usedand where they are to be placed on the unit.
The counterbalance effect needed on an operating unit, will be determined by the measurements of the peak andminimum polished rod loads in the field. The actual counterbalance effect reuired may then be calculated andthe counterweights ad*usted accordingly. /or the air balanced unit this simply means that the air pressure in thecylinder is increased or decreased.
Pea! "or#ue Estimation
Now that the counterbalance effect is understood, let us consider the torue that is imposed on the crank by thelow speed shaft of the gear reducer during the pumping motion. 2ur design ob*ective is to be sure that the peaktorue does not e'ceed the limits imposed by the manufacturer.
+e remember that torue is eual to the force acting at right angles to a lever arm, multiplied by the length ofthe arm. Torue tends to produce rotation at the point of connection. for e'ample, torue is applied to the nut ona tire, of a car, as you tighten it. The torue, we are particularly interested in, is applied to the crank by the low
speed shaft of the gear reducer ;/igure (
-
7/26/2019 The Rod Pumping - System Design
23/37
Figure 1
The torue provided by the shaft is transmitted to the crank which, in turn, causes the pump to operate. It mustbe sufficient to cause the pump to operate in a continuous manner under normal operating conditions.
It is provided by the prime mover acting through the gear reducer.
The net torue at the gear reducer is eual to the torue caused by the well loads acting on the polished rod,minus the torue caused by the counterweights acting along the crank. 5ecause the magnitude of these twoterms change during the pumping cycle, the peak torue is defined as being eual to the ma'imum net torue
which occurs during the pumping cycle.
The net torue imposed on a typical beam pumping unit is shown in /igure & and /igure ".
http://figurewin%28%27../asp/graphic.asp?code=765&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27) -
7/26/2019 The Rod Pumping - System Design
24/37
Figure 2
Torue is plotted on the vertical a'is, with both negative and positive values, and time on the hori3ontal a'is.
-
7/26/2019 The Rod Pumping - System Design
25/37
Figure 3
The curves show in /igure &the rod load and counterweight components of the torue, during one full cycle,beginning with the upstroke. Notice that the rod load during the upstroke is positive and the counterweighttorue is negative. The ma'imum value of the first and the minimum value of the second occur about midwaythrough the upstroke. Then, one begins to decrease and the other increase. They become eual and very close to3ero at the top of the upstroke and, then, reach ma'imum and minimum points midway through the downstroke.In/igure ", we net the effect of these two components, and we see that the net torue reaches a ma'imumvalue ;peak torue< midway through the up and down portions of the stroke. The gear reducer, then, must bedesigned to accommodate this peak net torue by an appropriate safety margin. +e shall see shortly thatmanufacturers specify the peak torue for each pumping unit. The above representation of torue during thepumping cycle is for a conventional unit. It will be different for the other types of units.
To calculate the peak torue of a pumping unit, we turn, once again, to two additional 8$I correlations shown in
/igure 7 and /igure 4.
http://figurewin%28%27../asp/graphic.asp?code=765&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=4%27,%274%27) -
7/26/2019 The Rod Pumping - System Design
26/37
Figure #
$eak torue is given by the multiple of four terms:
(10)
Where: P = pea t$r5ue, l9in
-
7/26/2019 The Rod Pumping - System Design
27/37
Figure $
Ta= torue ad*ustment factor, fraction
S = polished rod stroke length, in.
+ith a brief inspection, we see that, for our e'ample problem, the second and the third terms are already known.It is the first and the fourth that we obtain from the two new correlations.
The peak torue correlation is shown in /igure 7. Note that the first term in the peak torue euation ;. (#< isshown on the vertical a'is. The two familiar dimensionless variables are shown in the same relative positions as
they were in earlier correlations. In this case, the dimensionless pump speed is NNo. 2nce again, we start froma point on the hori3ontal a'is eual to #."&B, and move vertically upward to a value of /oSkreual to #.(". +ethen move hori3ontally to find a value of #."& on the vertical a'is.
. (#, for our e'ample problem, then, has the following form:
8 single unknown, Ta, remains to be determined. +here +rfSkr= #.", Ta= (.#, and no further ad*ustmentsto the euation are necessary. +here +rfSkrH #."D Tadiffers from (.#. In order to calculate its value underthese conditions, we turn to the fourth 8$I correlation shown in /igure 4. In this correlation, the familiardimensionless variables are found on the verticaland hori3ontala'is. In this case, the hori3ontal a'is is . +ithinthe chart itself there are values in percentage ranging from positive values on the outer rim to negative valuesnear the center. for specific values of the dimensionless variables, we use this chart to find the appropriatepercentage.
http://figurewin%28%27../asp/graphic.asp?code=765&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=765&order=4%27,%274%27) -
7/26/2019 The Rod Pumping - System Design
28/37
The value or this percentage is then used to calculate the torue ad*ustment constant, Tausing the followingeuation ;Note that all terms are now familiar to us
-
7/26/2019 The Rod Pumping - System Design
29/37
Figure 1
This variable, also happens to be the first term in the calculation for the polished rod horsepower. To find itsspecific value, we enter the hori3ontal a'is at a value for NNoof #."&B and move vertically upward until a valuefor /oSkrof #.(" is reached. +e then move hori3ontally to the left to find a value of /"Skrof #.&&4.
Substituting this value plus the known value of other terms into . (& yields:
P@P = (0.22)(12,)(6')(l6)(2.* 1096) = 7.' @PWhat %e reall/ need t$ n$% is the nameplate h$rsep$%erH that is, the minimum h$rsep$%erre5uired t$ run the unit. t ma/ e calculated usin& the #$ll$%in& relati$nship:
(1)Where:
@Pnp= nameplate h$rsep$%er, @P6-/ = cyclic load factor
S= surface efficiency of pumping unit, fraction
We ha"e Iust learned t$ calculate P@P, the p$lished r$d h$rsep$%er. he c/clic l$ad #act$r,?>, represents the additi$nal reser"e p$%er that is needed t$ handle the c/clic nature $# theeam pumpin& l$ad. $r l$% pea t$r5ues and uni#$rm t$r5ue ran&es, the c/clic l$ad #act$r is
-
7/26/2019 The Rod Pumping - System Design
30/37
l$%, %hereas, i# the pea t$r5ues are hi&h and the ran&e n$nuni#$rm, the c/clic l$ad #act$r ishi&h.
The prime mover normally recommended for beam pumping units is the N%8 !esign !electric motor. /or this
unit, the 6-/ is about (."04. /or N%8 6 electric motors and multicylinder engines, the 6-/ will be about (.1A0.
These values are for the conventional and air balanced units and will differ for the %8>9 II ;Table (
-
7/26/2019 The Rod Pumping - System Design
31/37
Table 2
In some cases the minimum si3e connection will be adeuateD in other cases, the ma'imum will be needed. 8
number of factors, including polished rod horsepower, torue loading, system voltage, startup problems andmotor characteristics, will influence motor si3e. Substituting the known values into . (" yields:
he nameplate h$rsep$%er #$r the N4A; D m$t$r is #$und t$ e 16.. N$te that the m$t$r si-e isa$ut t%$ times the p$lished r$d h$rsep$%er. er/ liel/ this %$uld mean that /$u %$uld $rder a20 h$rsep$%er unit, ecause m$t$rs c$me in discrete si-es.
There are a number of alternative ways of calculating the horsepower reuired for the prime mover. Some ofthese have been developed by manufacturers, others by individual oil companies. There may be a specific onethat has been developed for your company. 'amples of alternative nameplate horsepower calculations used by
one manufacturer are shown in Table " .
http://figurewin%28%27../asp/graphic.asp?code=766&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=766&order=3%27,%273%27) -
7/26/2019 The Rod Pumping - System Design
32/37
Table 3
Rod Stress Calculations
The last calculation that should be done is one that will assure us that the rod stress is not too high. In essence,
ma'imum rod stress is eual to the peak polished rod load divided by the crosssectional area of the top rod:
(1')n this case %e ha"e a 79in t$p r$d, and s$ the r$d stress is:
his "alue is %ell el$% the pre"i$usl/ menti$ned maimum all$%ale stress #$r the r$ds.
Now that all the ma*or design variables have been calculated, for the pumping unit, a few words should be said
about the 8$I ratings of pump units and the designations used by the manufacturers.
Deign !hart, Table
Table ( . $ump $lunger Si3es >ecommended for C2ptimumC 6onditions
http://figurewin%28%27../asp/graphic.asp?code=763&order=0%27,%270%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=0%27,%270%27) -
7/26/2019 The Rod Pumping - System Design
33/37
Table 1
/igure ( . graph of %a'imum $ractical $ump Speeds, 8ir 5alance
http://figurewin%28%27../asp/graphic.asp?code=763&order=1%27,%271%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=1%27,%271%27) -
7/26/2019 The Rod Pumping - System Design
34/37
Figure 1
/igure & . graph of %a'imum $ractical $ump Speeds, %ark II
http://figurewin%28%27../asp/graphic.asp?code=763&order=2%27,%272%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=2%27,%272%27) -
7/26/2019 The Rod Pumping - System Design
35/37
Figure 2
Table & . Tubing !ata
Table 2
http://figurewin%28%27../asp/graphic.asp?code=763&order=3%27,%273%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=3%27,%273%27) -
7/26/2019 The Rod Pumping - System Design
36/37
Table " . Sucker >od !ata
Table 3
Table 7 . $ump 6onstants
http://figurewin%28%27../asp/graphic.asp?code=763&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=5%27,%275%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=4%27,%274%27)http://figurewin%28%27../asp/graphic.asp?code=763&order=5%27,%275%27) -
7/26/2019 The Rod Pumping - System Design
37/37
Table #