The Practicing Electronics Technician’s Handbook
61
THE PRACTICING ELECTRONICS TECHNICIAN’S HANDBOOK 2021 UPDATE Second Edition
Transcript of The Practicing Electronics Technician’s Handbook

THE PRACTICING ELECTRONICSTECHNICIAN’S HANDBOOK
2021 UPDATE
Second Edition

THE PRACTICING ELECTRONICSTECHNICIAN’S HANDBOOK
www.gbctechtraining.com
© 2021 George Brown CollegeGeorge Brown College School of Distance Education160 Kendal Ave, Toronto, ON M5R 1M3
Second Edition
2021 UPDATE

PREFACE
Electronics and electromechanics are incredibly exciting and dynamic fields, but to be successful means having a thorough understanding of the foundational skills and concepts that make electricity so electrifying.
The Practicing Electronics Technician’s Handbook was developed in 2019 to be a compact collection of fundamental content for electronics and electromechanical technicians to refer to throughout their career. Our primary goal in preparing this second edition was to expand the range of topics in the handbook and update and refresh content. The handbook is still broken down into three sections for easy reference: articles, key equations, and supplemental information, all aimed to help users understand the content and build the necessary skills to succeed in the field. We have added subcategories to the Articles section to make it easier to find topics of interest.
Covering everyday skills and topics such as areas of difficulty when working with linear DC network theorems, and math skills needed to solve simultaneous equations, the articles in the handbook clearly explain complex topics. Key equations included are commonly used equations that are divided by topic, such as solving for instantaneous voltage and average voltage.
Additional topics are covered in the supplemental content section, with numerous diagrams included to help visualize theories.
We hope that this handbook helps you develop a fuller understanding of electronics and becomes a useful reference to you in the future.

3THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
1. The Practicing Electronics Technician’s Series . . . . . . . . . . . . . 1
ELECTRICITY AND CIRCUIT ANALYSIS
The Significance of Conductor Resistance and How to Calculate It. . . . . . . . . . . . . . . . . . 4
Everything You Need to Know About Current Divider Circuits . . . . . . . . . . . . . . . . . . . . . . 6
Converting Parallel RL Circuits to their “Easier To Work with” Series Equivalents . . . . . . . 8
How to Create Correct Ohm’s Law KCL Branch Equations for Nodal Analysis . . . . . . . . 10
The Utility of Finding the Thevenin Equivalent Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
The Importance of Power Factor Correction and How it can be Accomplished . . . . . . . . 15
How to Solve Simultaneous Equations with Multiple Unknowns . . . . . . . . . . . . . . . . . . . 17
Using the Natural Log or “ln” Function in Circuit Analysis . . . . . . . . . . . . . . . . . . . . . . . . 20
Relation of Radians and Angular Velocity to AC Circuits . . . . . . . . . . . . . . . . . . . . . . . . . 22
MAGNETISM
The Importance of Inductance of a Coil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
An Overview of Magnetic Field Lines and its Characteristics . . . . . . . . . . . . . . . . . . . . . . 28
Why Do We Need an Air Gap in Magnetic Circuit & How to Calculate it? . . . . . . . . . . . . 29
FILTERS AND DIGITAL ELECTRONICS
An Overview of Filters in A Crossover Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Common Rules for Weighted Number Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2. Key Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3. Supplemental Content . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Electric Charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Resistance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
RC Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Schematic Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
TABLE OF CONTENTS

4THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
In this article, we will review the calculation required to determine the resistance of a given conductor. This often overlooked parameter can be important when trying to determine the appropriate wire diameter for a given application. It is also important to consider conductor resistance when examining application efficiency. Lower resistance means lower power dissipation by the conductor. Optimizing these two aspects of conductor resistance for your specific application can lead to significant reductions to implementation and operating costs. It is important to know the resistance offered by a given conductor as well as have an understanding of the extent to which that resistance impacts on the application and its operation. For this reason, we will review some relevant aspects of conductor resistance and briefly describe and discuss them.
WHAT FACTORS DETERMINE THE RESISTANCE OF A GIVEN CONDUCTOR?
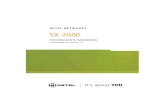
There are three factors that determine the amount of resistance a given conductor will have. They are illustrated here, in the relationship used to calculate conductor resistance.
We begin by acknowledging the obvious fact that the length of a conductor will contribute to its overall resistance. The longer the length of a given conductor, the more resistance that conductor will have. This can be clearly seen in the relationship provided above.
The material resistivity of the conductor plays a significant role in the overall resistance. This is because different materials for example gold or copper, offer different amounts of resistance to continuous current flow. Conductor materials are generally selected on a cost-benefit and suitability basis. The material resistivity of some of the most common conductors used today is listed below.
The last significant factor that determines conductor resistance is the cross-sectional area of the given conductor. It is important to note the inverse relationship between the cross-sectional area of a conductor, and the conductor’s resistance. The smaller the cross-sectional area of the conductor, the larger the resistance value of the conductor becomes. This means that although it may be cheaper to use smaller conductor sizes, there is a trade off with resistance.
THE SIGNIFICANCE OF CONDUCTOR RESISTANCE AND HOW TO CALCULATE IT
Material Resistivity, ohms·m
Silver 1.64 x 10-8
Copper 1.72 x 10-8
Gold 2.45 x 10-8
Aluminum 2.83 x 10-8
Resistance = Resistivity x ( Length / Area )
R = ρ * ( L / A )
R = resistance in ohms
ρ = material resistivity in ohms metres
L = conductor length in metres
A = cross-sectional area in square metres

5THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
IN WHAT WAYS CAN CONDUCTOR RESISTANCE BE SIGNIFICANT?
This relationship provides a means of determining conductor resistance which can be used to examine power losses that contribute to the overall efficiency of an application. This relationship can also be rearranged to solve for Area. This calculated value for cross-sectional area can then be used to provide the required wire diameter to meet specific application needs. As previously stated, these two considerations have impact on implementation and operating costs and are worth examining.
CONDUCTOR RESISITENCE
EXAMPLE
An example of the general relationship for calculating a conductors resistance to ascertain the minimum diameter and cross-sectional area is provided in the video animation Calculating Required Wire Diameter And Cross-sectional Area.

6THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
As the total current equals the sum of the individual branch currents, then the total current, IT flowing in the circuit is given by Kirchhoff’s current law (KCL) as:
Equation 1: IT = IR1 + IR2
As the two resistors are connected in parallel, for Kirchhoff’s Current Law, (KCL) to hold true it must therefore follow that the current flowing through resistor R1 will be equal to IR1 = IT – IR2
Similarly, current flowing through resistor R2 will be equal to IR2 = IT – IR1
Let’s calculate voltages; V1= IR1 × R1 & V2= IR2 × R2
Since the Voltage across each resistor is same IR1 = V ⁄ R1 and IR2 = V ⁄ R2
Substituting IR1 and IR2 in Eq (1); we now realize that IT = V[ (1 ⁄ R1) + (1 ⁄ R2) ]
re-arranging this we get V= IT [ (R1 × R2) ⁄ (R1 + R2 ) ]
In a parallel circuit, all the components have their terminals connected together sharing the same two end nodes. This results in different paths and branches for the current to flow or pass along. However, the currents can have different values through each component, but the voltage remains the same across two end nodes.
RESISTIVE CURRENT DIVIDER CIRCUITS
Consider a current divider circuit with two resistors connected together in parallel as shown in below diagram. We will explain how to calculate the current flowing through each resistor in a two or more resistor parallel circuits. Parallel resistors R1 and R2 splits the supply or source current between them into two separate currents IR1 and IR2 before joining together again and returning back to the source.
EVERYTHING YOU NEED TO KNOW ABOUT CURRENT DIVIDER CIRCUITS
I
R1
+
-
+
-
R2
+
-

7THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
EVERYTHING YOU NEED TO KNOW ABOUT CURRENT DIVIDER CIRCUITS
Solving for IR1 gives: IR1 = IT (V ⁄ R1) = IT [ R2 ⁄ (R1 + R2) ]
Likewise, solving for IR2 gives: IR2 = IT [ R1 ⁄ (R1+R2) ]
Notice that the above equations for each branch current has the opposite resistor in its numerator while solving for I1 we use R2, and to solve for I2 we use R1. This is because each branch current is inversely proportional to its resistance.
CURRENT DIVIDER PRACTICE EXAMPLE 1:
Assuming a total current of 25mA flowing through the network. Resistor R1=6 and R2=9 is connected in parallel. Let us find out IR1 & IR2 using above concept.
How to find IR1 & IR2?
CURRENT DIVIDER CIRCUIT WITH THREE OR MORE PARALLEL BRANCHES
In the case of three or more parallel branches, the equivalent resistance is used to divide the total current into the fractional currents. The total current, IT being the sum of all the individual branch currents.
IT = IR1+ IR2+ …. + IRx
Using the same concepts above, where x = 1, 2, 3, 4 and RT = R1 + R2 + ….+ RN
IT IT IT ITIR1 = = = = = 15mAV R2 9 9R1 R1+ R2 6 + 9 15
R1IT IT IT ITIR2 = = = = = 10mAV 6 6R2 R1+ R2 6 + 9 15
ITIRx = RX
RT
R16 Ohms
+
-
+
-R29 Ohms
+
-
I

8THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Here, we look at a simple technique that can be used to simplify circuit analysis when working with series and parallel RL circuits. One of the issues encountered by technicians who are working with parallel RL circuits is the need to work with values that are the reciprocals of the more commonly used standard units. The use of conductance, susceptance, and admittance instead of resistance, reactance, and impedance, can often cause confusion or uncertainty when working with these lesser employed units. This conversion approach or technique can be especially helpful when working with circuits having multiple resistors and inductors in mixed series/parallel configurations. Reducing such a mixed topology network down to a few inductors and resistors in series greatly simplifies calculating overall resistance and inductance in a given circuit or network. In the series format, it is simply a matter of addition when calculating total inductive reactance, total resistance to get to overall impedance.
Below are the basic equations for creating a series representation of a given parallel RL circuit.
A
B
Rs = ( Rp * Xp2 ) / ( Rp2 + Xp2 )
Xs = ( Xp * Rp2 ) / ( Rp2 + Xp2 )
XpRpA
B
Rs
Xs
PERFORMING THE CONVERSION...
Step 1: Calculate the equivalent resistance value Rs
Step 2: Calculate the equivalent inductive reactance Xs
Step 3: Calculate the required inductor value that will provide the appropriate series inductive reactance for a given frequency. Use L = XL / ( 2 * Pi * freq ) to obtain the inductor value.
Step 4: Redraw the circuit in a series configuration using the arrived at component values for the inductor and resistor.
CONVERTING PARALLEL RL CIRCUITS TO THEIR “EASIER TO WORK WITH” SERIES EQUIVALENTS

9THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
CONVERTING PARALLEL CIRCUITS
Correctly employing the above steps will result in a series representation of a parallel RL circuit that behaves identically with respect to voltage, current, and the phase relationship between them. From the perspective of points A and B in the above, both circuits will result in identical behaviour.
Employing topology conversion techniques such as Parallel to Series RL circuit conversion, Delta-Wye conversions for resistor networks, or simple Source Transformations (converting current sources with parallel resistances to voltage sources with series resistances) is a common simplification tactic that can be extremely helpful in circuit reduction and analysis at a technician level. As a technician, the more tools you have at your disposal, the easier it will be to simplify and reduce complex circuits down to simple representations. This in turn will serve to reduce the chance of errors when performing technician level circuit analysis.

10THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Nodal analysis is a means of determining the voltage present at a node of interest with respect to a specified reference point. Many technicians have difficulties creating valid Ohm’s Law representations for the KCL (Kirchhoff’s Current Law) node equations when trying to perform this type of circuit analysis. They often struggle with the concept that arbitrary branch current directions can be assigned at the start of the analysis, and the correct results can always be arrived at regardless of whether or not the branch current actually flows in the assumed direction.
The key to this analysis is to ensure that you state your current law equations for each node of interest in terms of your selected current direction. This sounds simple, however, this is the stage at which most errors occur when performing this type of analysis. Below is a straight forward approach that will always yield correct current law equations for independent nodes in any linear DC network. The most important thing to consider is how to define the unknown current which flows between the node of interest and the reference node. If this representation of branch current is incorrect, the entire analysis will be invalid. The correct application of Ohm’s law in terms of the assumed current direction is essential to identifying node voltages and their polarities with respect to the specified reference node when performing this type of analysis. Below are the six scenarios that can exist when creating equations used to describe branch current flowing into or out of an independent node. Every branch in the linear DC network can be reduced to one of these six scenarios.
In Figure 1-1a, a known resistance is connected between two nodes in a network. We desire an equation that will define the current flowing through the resistor, in terms of the voltages present at the two nodes and the displayed direction of current flow. This current will allow us to define the voltage at node A.
Figure 1-1
Ref Ref
Figure 1-1
(a) (b)
When current is flowing from node A towards the reference node as in Figure 1-1a, according to electron flow, node A must be at a lower voltage than the reference node. A current flowing in the direction shown can be expressed using Ohm’s law as follows:
I = ( VRef - VA ) / R Eq. 1
HOW TO CREATE CORRECT OHM’S LAW KCL BRANCH EQUATIONS FOR NODAL ANALYSIS

11THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
KCL BRANCH EQUATIONS
When current is flowing from the reference node towards node A as in Figure 1-1b, the reference node is at a lower voltage than node A. A current flowing in this direction can be expressed using Ohm’s law as follows:
I = ( VA - VRef ) / R Eq. 2
In Figure 1-2a, a voltage source appears between the node of interest and the reference node, its effect on the current flowing through the resistor must be taken into account. When examining the effect of the voltage source, you need to determine if the polarity of the voltage source adds to the current in the assumed direction, or does it oppose it. Electrons flow out of the negative terminal and into the positive terminal of a voltage source. If the direction of flow for the source agrees with the direction of flow that was assumed, the source would be adding ( Vs / R ) to the current already flowing between the nodes prior to the sources introduction. (See above)
Figure 1-2
Ref Ref
Figure 1-2
(a) (b)
Ref Ref
(c) (d)
The expression for the current flowing in Figure 1-2a is similar to that in Figure 1-1a except that the effect of the voltage source on the current flowing through the resistor needs to be included in the expression. An easy way to visually determine the sign to use when accounting for the effects of the source (to add it or subtract it) is to apply the sign of the source terminal into which the current flows. In this example, the current flows into the positive terminal of the voltage source. This agrees with the assigned current direction and the current from the voltage source is therefore added to the expression for the current.
I = ( VRef - VA ) / R + Vs / R
I = ( VRef - VA + Vs ) / R Eq. 3
The expression for Figure 1-2b is based on that in Figure 1-1b. Once again, the effect of a voltage source needs to be accounted for in the node voltage expression. This time, since the current enters the negative terminal of the voltage source, its contribution is subtracted from the expression for the current.
I = ( VA – VRef ) / R - Vs / R
I = ( VA - VRef - Vs ) / R Eq. 4
Figure 1-2c is basically the same as Figure 1-2a except that the voltage source is connected in the opposite

12THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
direction. This means that the current is entering the negative terminal of the source and you must subtract its contribution from the expression for the current between the two nodes.
I = ( VRef - VA ) / R - Vs / R
I = ( VRef - VA - Vs ) / R Eq. 5
Figure 1-2d is similar to Figure 1-2b but once again the voltage source is connected in the opposite direction. The current shown to be flowing, enters the positive terminal of the voltage source indicating that the contribution from the voltage source should be added.
I = ( VA - VRef ) / R + Vs / R
I = ( VA - VRef + Vs ) / R Eq. 6
The previous equations, labelled 1 through 6, are essential to the proper application of nodal analysis to linear (resistive) DC networks. Any number of resistances and/or voltage sources between the node of interest and the reference node can be reduced to one of the six configurations illustrated in the above examples.
USING NODAL ANALYSIS TO SOLVE LINEAR DC NETWORKS
There are eight basic steps to follow when performing a Nodal Analysis on a linear DC network. With the aid of the six equations provided above, the steps outlined below will ensure that you arrive at the correct values when performing the analysis.
Step 1: Identify all nodes in the circuit.
Step 2: Select a reference node.
Step 3: Identify the independent nodes in the circuit. An independent node is a node whose voltage is determined by the size of the resistor and circuit configuration. Assign an arbitrary current direction for all currents entering or leaving the independent nodes in the network.
Step 4: Write the KCL equation for the currents entering or leaving each independent node in terms of the chosen current directions.
Step 5: Use Ohm’s law to express each current listed in the KCL equations for the independent nodes keeping the assumed current direction in mind. Use the appropriate equation from the 6 equations outlined above paying close attention to the chosen direction of current flow.
Step 6: Express the KCL equations for the independent nodes using the Ohm’s law representation obtained from step 5.
Step 7: Solve for the independent node voltages using the equations obtained from step 6. (Use the same approach outlined for Loop analysis when solving the multiple simultaneous equations.)
Step 8: Use the acquired node voltages with the Ohm’s Law representations for branch current, to solve for the unknown independent node currents. A positive current value result means that the current flows in the direction arbitrarily chosen at the start of the analysis. If the branch current value is negative, it means that the current actually flows in the opposite direction than the assumed one.
KCL BRANCH EQUATIONS

13THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
In this article, we will once again be working with a circuit reduction technique. This particular technique is quite useful for determining how changes in load conditions can impact on circuit performance. Until now, we have provided reduction techniques that are useful for fixed load circuit analysis. Thevenin’s theorem can be used in cases where we want to see how load voltage, current and power are effected by changes in load resistance.
As an example of the utility of this theorem consider the testing of any power generation equipment. One of the key aspects of such a test exercise illustrates the usefulness of being able to make multiple calculations pertaining to varying load conditions easily. A resistive or unity power factor load bank is a device that is designed to provide scalable loads and is used during testing of power generation equipment. To calculate expected values under the relevant series of load conditions can be tedious. Thevenin’s circuit reduction approach simplifies it. Not only can this approach be applied to larger scale power generation applications, it applies to something as simple as testing automotive batteries for high load usage during the turning over of the engine as opposed to other expected operating conditions.
HOW IS THIS USEFUL?
The theorem can be applied to create a simplified version of a linear DC network that consists of only a single source and series resistance which will behave identically to the linear DC network in terms of the load. As an example, this would drastically reduce the number of calculations required to obtain data in a situation where we want to know how a given network responds to 50%, 60%, 70%, 80% and 90% full load conditions. A somewhat complex traditional Loop or Nodal analysis would need to be repeated 5 times to make the data available for each load value. As an alternative, we can create a Thevenin Equivalent circuit consisting of a single source and series resistance that will behave identically with respect to the load as the entire linear DC network would, and then do 5 very simple ohm’s law level calculations to acquire load voltage (current, or power) under each load condition.
In this example, it is easy to see how the reduced circuit representation (Figure 2) can simplify our desired calculations for different loads even for a linear DC network as simple as the one used here which consists of only a single source and 4 resistors.
Figure 1
THE UTILITY OF FINDING THE THEVENIN EQUIVALENT CIRCUIT
E 24 V
R1 200
R2 200
R3 50
R4 150 R Load
R Load
A
B
Eth 6 V
Rth 75
A
B

14THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
FINDING THEVENIN EQUIVALENT CIRCUITS
Figure 2
E 24 V
R1 200
R2 200
R3 50
R4 150 R Load
R Load
A
B
Eth 6 V
Rth 75
A
B
The original network (Figure 1) is quite simple, however, with Thevenin circuit reduction, the equivalent circuit (Figure 2) is much easier to work with when you need to know load voltage and load current for loads of 50 ohms, 60 ohms, 70 ohms, 80 ohms, and 90 ohms. With the reduced version, you can use V/R to find load current, and a simple voltage divider to calculate load voltage for each load resistance value. In contrast, if you use Loop or Nodal analysis, you would need to repeat those complex calculations over and over to get the desired data.
This powerful technique is not restricted to only simple single source linear DC networks. It can be used on multi-source, complex networks as well. The more complex your original linear DC network is, the more you simplify your life by creating the Thevenin Equivalent circuit representation of that network.
WHAT DOES THE THEOREM STATE?
A two-terminal linear DC network, consisting of any number of fixed value resistances and any number of fixed DC voltage and current sources, can be replaced by a single voltage source in series with a single resistance that will produce the same effects at the terminals.
HOW IS IT IMPLEMENTED?
Essentially, we redraw the circuit to provide a simplified version that behaves identically.
Step 1: Identify the portion of the network for which you require the Thevenin Equivalent circuit. Label the two terminals as points A and B and remove the portion not being included in the reduction. (ie. the load)
Step 2: Determine the Thevenin equivalent resistance (Rth) by short circuiting all voltage sources, and open circuiting all current sources. Once done, calculate the resistance that now appears between the two terminals labelled points A and B.
Step 3: Determine the Thevenin equivalent voltage (Eth) by returning all sources to their previous position and state, and calculating the voltage that would appear across the two terminals labelled points A and B.
Step 4: Draw the Thevenin Equivalent circuit using a single voltage source with a voltage value of Eth, and a single series resistance using a resistance value of Rth obtained above. Connect the previously removed portion of the circuit (the load) and make your simplified calculations for voltage, current, or power.

15THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
This article will review the significance of power factor correction. As a technician, you may be responsible for monitoring and adjusting the power factor of your industrial operation. Many industrial applications involve induction motors or other equipment that results in supply voltage and supply current being out of phase. This is wasteful and expensive for power providers. In light of this fact, power companies will offer financial incentives by way of reduced rates to those customers who maintain a power factor as close to 1 as possible. Often, technicians will be charged with monitoring and/or correcting this “out of phase” relationship between supply voltage and current. It can be demonstrated that you can obtain the same real power dissipation (in Watts) with less current required if you maintain a power factor as close to 1 as possible. When voltage and current are in phase, the load appears purely resistive to the source and volt-amperes or VA are kept to a minimum. True power (Watts) has no VA component unlike apparent power. Power factor correction aims to bring the apparent power value (measured in VARs or volt-amp-reactive) as close as possible to the amount of true power you are using in Watts. This will result in less current being needed to provide the same amount of true power. Changes in plant equipment can often result in the need for power factor correction in order to maintain the benefits of in phase voltage and current and the resulting reduction to power costs.
We will work through an example of power factor correction by assessing the phase relationship of the supply voltage to the supply current. We will be calculating the amount of capacitance we need to add to our inductive load in order to bring the power factor back to 1. With all inductive loads, voltage is leading current and in order to bring these two parameters back into phase, we need to add some capacitive reactance to the circuit to offset the phase imbalance.
HOW DO WE CALCULATE POWER FACTOR?
Power Factor can be calculated by taking the cosine of the phase angle between the supplied voltage and the supplied current.
Power Factor = cos (theta)
Voltage and current out of phase Voltage and current in phase
When the voltage and current are in phase, the angle is equal to zero. The cosine of zero equals 1. Any difference between the phase of the voltage, and the phase of the current results in a non-zero phase angle resulting in a power factor of less than 1 as the cosine of any angle other than 0/360 will range from 0 to less than 1.
THE IMPORTANCE OF POWER FACTOR CORRECTION AND HOW IT CAN BE ACCOMPLISHED

16THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
THE IMPORTANCE OF POWER FACTOR CORRECTION AND HOW IT CAN BE ACCOMPLISHED
A second relationship describes this quantity (power factor) as the ratio of True Power in Watts, to Apparent Power in VA (volt-amperes): Power Factor = True Power / Apparent Power
HOW DO WE RESOLVE ANY EXISTING PHASE DIFFERENCE?
When the load is predominantly inductive in nature, in order to acquire a power factor of 1, we most often will introduce the correct amount of capacitive reactance to the load in order to bring supply voltage and supply current back into phase. This is accomplished by measuring the phase difference between the voltage and the current, and then using that value to calculate the inductive reactance in the load. Once you know that, you only need to calculate the required parallel capacitor value needed to make the load appear completely resistive to the source. Set XC = XL.
Step 1: Calculate Z (total impedance)
Z = Erms / Irms
Step 2: Measure the phase angle (theta) between voltage and current
Theta (this example) = -37.8 degrees
Step 3: Calculate XL
XL = Z sin (theta)
Step 4: Use XL and supply frequency to calculate required capacitor value
We know that for the load to appear resistive, XL = XC
XC = XL
XL = 1 / 2*Pi*f*C
C = 1 / 2*Pi*f*XL
Step 5: Place a capacitor of the value calculated in step 4 in parallel with the load. This will cause the load to appear purely resistive as the inductive and capacitive inductances cancel each other out and the voltage and current from the source will now be in phase.
In practical terms, this procedure results in less current being required to provide the same real power to the load. This results in reduced operating costs for your industrial application by way of cheaper power rates from your utility company.

17THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Many technicians encounter difficulty in solving node or loop equations containing multiple unknown quantities. This article reviews a means of solving such equations to get loop currents or node voltages when performing linear DC network analysis. The two technician level methods for solving simultaneous equations having multiple unknowns used when dealing with two or three equations are “substitution” and “elimination”. In order to solve for a given number of unknowns, we require that the same number of equations be provided. For instance, we would require two equations to solve for two unknown quantities. We would require three equations to solve for three unknown quantities, and so on.
USING THE SUBSTITUTION APPROACH TO SOLVE SIMULTANEOUS EQUATIONS
Solve for x, and y given these two equations containing the two unknown quantities.
Eq.1 3x + 2 = 2y
Eq.2 8x – 4 = 4y
We want to isolate the y term in one equation. By this we mean, we need an equation that states the value of a single y in terms of x.
Eq.1 3x + 2 = 2y
y = (3x + 2) / 2
Since we now have an expression for the value of y in terms of x, we will replace/substitute the y term in Eq.2 with this new expression we obtained above. This will leave us with only one unknown quantity, x, to solve for in Eq.2 instead of the two unknowns we had before.
Eq.2 8x – 4 = 4y
8x – 4 = 4(3x + 2) / 2
8x – 4 = (12x + 8) / 2
8x – 4 = 6x + 4
8x = 6x + 4 + 4
8x – 6x = 4 + 4
2x = 8
x = 8/2
x = 4
Having the value of x, we can use it in Eq.1 or Eq.2 to find the value of y. (Using Eq.1)
3(4) + 2 = 2y
12 + 2 = 2y
14 = 2y
y = 14 / 2
y = 7
HOW TO SOLVE SIMULTANEOUS EQUATIONS WITH MULTIPLE UNKNOWNS

18THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
USING THE ELIMINATION APPROACH TO SOLVE SIMULTANEOUS EQUATIONS
This approach can also be used to solve for the two unknowns in the same two equations.
Eq.1 3x + 2 = 2y
Eq.2 8x – 4 = 4y
This time, our objective is to find a factor to multiply one of the equations by which will allow us to sum the two equations and eliminate one of the unknowns. If we multiply both sides of Eq.1 by a factor of -2 and then sum the two equations, we will be left with an expression containing only one unknown. We selected -2 as the factor to multiply Eq.1 by so that the right hand side of Eq.1 when added to the right hand side of Eq.2 will result in the y term being eliminated from the resulting equation.
Eq.1 3x + 2 = 2y
-2 (3x + 2) = -2 (2y)
-6x – 4 = -4y
Now we will sum this new expression for Eq.1 with our original Eq.2. Adding the -4y from the right side of our new expression for Eq.1 to the 4y on the right hand side of Eq.2 will result in 0y, which effectively eliminates the y term from the resulting equation.
Eq.1 -6x – 4 = -4y (modified Eq.1 by factor of -2)
Eq.2 8x – 4 = 4y
To sum these equations, add the terms from the left hand side of each equation together, and add the terms from the right hand side of the equations together as follows…..
(-6x – 4) + (8x – 4) = (-4y) + (4y)
2x – 8 = 0
2x = 8
x = 8/2
x = 4
We would now use the value of 4 for x in either of the two original equations to solve for the value of y. (Using Eq.2)
8(4) – 4 = 4y
32 – 4 = 4y
28 = 4y
y = 28/4
y = 7
SOLVING SIMULTANEOUS EQUATIONS

19THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
In this last example, we eliminated the y term from the equations because it was an easily recognizable means of reducing the equation to a single unknown. We could have decided to eliminate the x variable instead, leaving an equation with y as the only unknown quantity.
Eq.1 3x + 2 = 2y
Eq.2 8x – 4 = 4y
In order to clear the x terms from the above equations, it will be necessary to apply a factor to both equations in order to create the situation we desire. If we multiply Eq.1 by 8 and Eq.2 by -3, the x terms become 24x and -24x respectively. These will cancel each other out when the two equations are summed.
Eq.1 8(3x + 2) = 8(2y)
Eq.1 24x + 16 = 16y
Eq.2 -3(8x – 4) = -3(4y)
Eq.2 -24x + 12 = -12y
Now we sum our two new equations to obtain an equation with a single variable. If we write the equations one on top of the other, we can simply sum vertically to arrive at our single variable equation.
Eq.1 24x + 16 = 16y
Eq.2 -24x + 12 = -12y
0x + 28 = 4y
4y = 28
y = 28/4
y = 7
We would now use this known value of y in one of the original equations to solve for the value of x. (Use Eq.1)
3x + 2 = 2(7)
3x + 2 = 14
3x = 14 – 2
3x = 12
x = 12/3
x = 4
SOLVING SIMULTANEOUS EQUATIONS
EXAMPLE
A practical example of how these techniques are applied is provided in the video animation on Loop Analysis. This example uses the Substitution and Elimination techniques to solve simultaneous KVL loop equations and is illustrated step by step.

20THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
The focus of this article is on Euler’s number and the utility of the related natural logarithm or “ln” function as they pertain to technician level circuit analysis. Once we have discussed the nature of Euler’s number and the related base “e” natural log function, we will move on to take a look at an example of their practical application for technicians when performing circuit analysis tasks.
WHAT IS EULER’S NUMBER?
Euler’s number is also known as the exponential constant and is a non-terminating “irrational” number. It is derived from the following infinite power series:
e = 1 + ( 1/1! ) + ( 1/2! ) + ( 1/3! ) + ( 1/4! ) + ( 1/5! ) + ...
e = 1 + ( 1/1 ) + ( 1/2 ) + ( 1/6 ) + ( 1/24 ) + ( 1/120 ) + ...
e = 2.718281828459 approx.
This mathematical constant is widely used in instances where quantities of interest exhibit exponential growth or decay. For the practical technician, an everyday example of such a relationship would be the charging and discharging of capacitors and inductors in series RC and RL circuits with respect to time.
WHAT IS THE NATURAL LOGARITHM (LN) FUNCTION?
Logarithms in general allow you to operate on, or isolate, exponents used with various “base” values. A well-known example is the “Common” or “base 10” logarithm used by technicians for power calculations. The “ln” function is the base “e” natural logarithm function. The natural logarithm or “ln” of the value “e*” is equal to “x”.
ln (e* ) = x
A TYPICAL NATURAL LOG APPLICATION FOR TECHNICIANS
As with all logarithm functions, the “ln” function is very useful in instances where we wish to isolate or manipulate exponents used, in this instance, with base “e” values. An example of such an instance arises whenever we need to know the time it takes the voltage across a capacitor to reach a desired level during the capacitor charging curve. We begin with the commonly used relationship for calculating the voltage across the plates of a capacitor as it charges.
Vc = E * (1 - e –t/Tau )
Vc = Capacitor Voltage in volts
E = Applied DC Voltage in volts
e = Euler’s Number (exponential constant)
t = Time in seconds
Tau = Time constant ( R*C) in seconds
USING THE NATURAL LOG OR “LN” FUNCTION IN CIRCUIT ANALYSIS

21THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
NATURAL LOG
The equation defining capacitor voltage uses Euler’s number. This is due to the fact that the capacitor charging curve exhibits exponential growth. We rearrange this relationship, isolating Euler’s number and its exponent on one side of the equation, and everything else on the other side. Once we have isolated Euler’s number and its exponent, we need to bring the exponent of “e” down to the main line so that we can operate on it as the variable we wish to isolate, “t” for time in seconds, is part of the exponent. This type of mathematical manipulation is accomplished by using logarithms. As we are dealing with a base “e” value, we apply the natural logarithm or “ln” function to both sides of the equation.
e –t/Tau = 1 – Vc/E
ln (e –t/Tau) = ln (1 – Vc/E)
Given that ln (e x) = x, the left side of the equation results in the desired “t” variable being moved to main line. It can then be isolated to solve for time given applied voltage and desired capacitor voltage level.
-t/Tau = ln (1 – Vc/E)
t = -Tau * ln (1 – Vc/E)
The above relationship provides the time it takes for the voltage on the plates of a capacitor to reach a specified value in a series RC circuit.

22THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Radians and angular velocity are terms that are commonly used in AC theory and AC measurement. Most of the electric energy used commercially is generated as Alternating Current (AC). The main reason Alternating Current is used is that alternating voltage may be easily raised or lowered in value. This is a tremendous advantage in electrical distribution systems, allowing AC power to be generated and distributed at a high voltage and reduced to a more practical voltage at the load. In today’s discussion we will look at the relation of radians and angular velocity to Alternating Current circuit. AC is produced when a conductor rotates through a magnetic field. This results in a waveform which is referred to as a sine wave.
SINE WAVE
The sine wave is an electrical waveform that is created when the amplitude or the amount of the signal is varied proportional to the sine of the angle through which the conductor is rotating at any given instant in time. It is a very common type of alternating current that is produced by either a rotating electrical machine, such as a generator, or by an electronic oscillator. As the conductor rotates around the circumference of a circle, it is traveling 360 degrees. These points of degrees can be illustrated on the waveform. For example, a full rotation or a full waveform is 360 degrees, half a rotation or half a waveform is a 180 degrees. The image below illustrates the formation of a sine wave as a conductor rotates through 360 degrees.
Phasor Diagram of a Sinusoidal Waveform
RELATION OF RADIANS AND ANGULAR VELOCITY TO AC CIRCUITS
RADIANS
Earlier we looked at the formation of sine wave as the conductor rotates through 360 degrees. Now, we will learn to measure angles in radians. In AC circuits, angles are frequently measured in radian, rather than degrees. Radian is defined by an arc of a circle where the length of an arc is equal to the radius of the circle. The circumference of
+Am A(t)= Am sin(ωt+φ)
-Am
Vector rotation
Rotating Phasor Sinusoidal Waveform in the Time Domain
60°90°
120°
150° 30°
30° 60° 90° 120° 150°180° 240° 300° 360°
330°
270°240°
210°
180° 0°210° 270° 330°
300°
ωt
ωt
A
ω rads/s

23THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
RELATION OF RADIANS AND ANGULAR VELOCITY TO AC CIRCUITS
a circle equals 2πr where r is the radius. A complete circle will therefore have 2π radians, which is subtended by 360°. In other words, to calculate how many degrees are in a radian, you can state the number of radians in the circle as 2π radians, which is equal to the number of degrees in a circle (360 degrees). So, the number of degrees in a radian can be found by dividing 360° by 2π.
Formula: 2πr = 360°, r = 360°/2π, 1 radian = 57.3°
ANGULAR VELOCITY
Angular Velocity is another term that’s related to Radian measure. It is the time rate of change in angular displacement. This is equal to the distance traveled by the conductor, which is measured in radians, divided by the period (T), time taken for one revolution. The term angular velocity can also be stated with a letter symbol ω, which is the lowercase Greek letter Omega. Therefore, Omega is equal to so many radians per second. If we look at just one waveform, then ω is equal to 2π radians over time in seconds i.e. (ω = 2π/T). The angle through which the conductors move in one second may be written as:
Angular velocity = ω = 2π/T (radians/second)
Another term we will discuss that relates to radian measure and angular velocity is frequency. Frequency (f) refers to the number of cycles or waveforms per second with unit of hertz or Hz. In formula, f = 1/T. If we combine the formulas of the last two terms, we arrive at angular velocity or Omega equal to 2πf.
Given: ω = 2π/T and ƒ = 1/T, therefore T= 1/ƒ, combined ω = 2π/ (1/ƒ) = 2πƒ
The term omega ω is a term that you will encounter in a number of formulas as you study AC theory in electricity and electronics.

24THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Let’s explore Inductance; one of the major properties of an electrical circuit or an electronic device. Inductance is defined as a property of electrical circuit or a device that opposes a change in current. It is important to note that inductance does not oppose the current but rather opposes the change in current flowing within the circuit.
The unit of inductance is henry (H) and it is dependent on the physical properties of the circuit and not on the electrical attributes as there is no current or voltage involved. Additionally, Inductance is directly proportional to ‘Number of Turns’, ‘Area encircled by coil’ and inversely proportional to the ‘Length of coil’.
The symbol used to represent inductance is the capital letter L. The inductance (or more precisely, the self-inductance) of the coil can be found using the following equation:
L = µN²A / l
Where:
L = Inductance in henries (H)
µ = permeability (Wb / A × m)
N = number of turns in coil
A = area encircled by coil (m²)
l = length of coil (m)
Applied Formula in Electrical Circuits:
L = et / Δl
Where:
L = Inductance in Henry (H)
e = Induced Voltage (V)
Δl = Change in Current (A)
REVIEW OF THE INDUCTANCE PROCESS
To understand the inductance process and how it works let’s review the illustrated DC supply with a switch and a coil (Figure 1). When the switch is closed, current flows through the circuit. Here we use electron flow shown in red arrows as the direction of the electrons. When we close the switch, current flowing from the battery increases within each coil. Considering the Left-Hand Thumb Rule, the current flows away and the magnetic flux flows in the counterclockwise direction and expanding outwards. Taking into account Coil 1 and Coil 2 as in the figure; flux from Coil 1 is sweeping out to cross over Coil 2 creating an induced voltage. Lenz’s Law and Faraday’s Law are the two laws applied to understand this process. The induced voltage will always set up a flux that opposes the original flux that caused it. Thereby our applied voltage is trying to drive current into the coil and the induced voltage is working against that. It doesn’t stop the current, it just slows the current down. If Ohm’s Law dictated that the current would be 10 amps it won’t go from 0-10 instantly, instead it would take some time depending on the inductance provided by the inductor.
THE IMPORTANCE OF INDUCTANCE OF A COIL

25THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
THE IMPORTANCE OF INDUCTANCE OF A COIL
In the next case we will try to decrease the current, in the same circuit with 10 Amps as established, the magnetic flux is interlinking all the turns in the coil. When we open the switch, the flux retreats back to the original conductor. The movement of flux is stopped as the flow of current stopped changing. The decreasing magnetic flux over each conductor coil turn causes relative motion between the magnetic fields resulting in a highly induced voltage. The action to reduce the current/voltage to zero by removing the applied voltage leads the continuous change in magnetic flux that induces the voltage trying to oppose the cause. Thus the circuit tries to keep the current flowing leading to a delay in current reduction rate rather than reducing it instantly. This is referred to as Inductive Kick. The process taking place is simply the returning energy back to the circuit from the magnetic fields. The amount of voltage that is induced depends on factors such as amount of flux, number of turns and time.
The opening of a circuit can cause a very high induced voltage in the coil as the time is very short and the flux collapses very quickly. If there is no path for this energy to pass through, we can get arcs across the switches or arc close to other connected devices which can cause damages. So, some precautions are highly recommended when coming across the characteristics of inductance in electronic circuits.
e = ΦN / t
Where:
e = Induced Voltage
Φ = Magnetic Flux
N = Number of Turns
t = Time
PREVENTIVE MEASURES TO AVOID ARC FLASH
The inductive current produced in a DC circuit has a high strength when the flux related to the coil drops out instantaneously. It is therefore important to take preventive measures to eliminate the damage by providing an alternative path for the energy. For example, a current transformer is a highly inductive device as it has many turns of coil and the number of turns of the coil has a great impact on the current generated ( L = µN2A/l , where N = no. of turns ).
Figure 1: Self Inductance
Battery
1
2
Induced Emf
Switch
Current
Flux Line

26THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
If the Ammeter attached with the coil as in Figure 2, is removed while the circuit is hot, the highly inductive circuit is interrupted. The opening of the circuit leads to the flux collapsing over the turns of coil producing an extremely high induced voltage that can draw an electric arc of 4-5 inches long. This electric arc can cause injury to the person trying to remove the ammeter from the circuit.
This is similar to the shunt winding of a DC motor, which is another highly inductive circuit. The DC shunt motor also satisfies all characteristics that generates a highly inductive current. The shunt motor is normally kept energized, and modifications are made to another part of the motor to provide an alternative path for the inductive current to flow. This is done so as the switching of the shunt field can cause severe damages and shorten the longevity of the contacts. Even in small coils used for PLC circuits, there is a kick to back-feed and do some damage.
Shunt Motor
The simple method to eliminate the damage due to back-feed current is to put a resistor across the inductor. This provides a path for the inductor to drive the energy but, when it is energizing for a longer period, it might be inefficient as it will have a power loss across the resistor all this while. This problem can be overcome by putting a diode in series with the resistor so that, the diode blocks the current during normal operation. This reduces the power dissipation across the resistor. The power is launched across the resistor only when the circuit is open triggering the inductive kick.
THE IMPORTANCE OF INDUCTANCE OF A COIL
Figure 2: Principle of Counter EMF
Batterycurrent
Inducedemf
Inducedopposing
flux
Flux from battery current
Induced opposing current
Batteryemf
I
S
+
+–
–
Armature
Shunt field

27THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Apart from using a single resistor and the resistor-diode series combination, a capacitor can also eliminate the damages of inductive current. The energy generated during the back-feed of the inductive current is dissipated into the capacitor and the remaining current flows back from the capacitor to the inductor thereby protecting the contacts of the switch as well as any other devices in contact. To summarize, the inductance is the property of a circuit that opposes a change in current in that circuit.
So far, we have looked into the Inductance caused by a DC circuit but when we take a look at inductance caused by AC current which changes continuously with respect to time, a Reactive Inductance is formed depending not only on the Inductance of the coil but also upon the frequency of the AC waveform as in the Figure 3.
Figure 3
THE IMPORTANCE OF INDUCTANCE OF A COIL
Voltage (volt)
-V
V
Time (s)

28THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
This article will review the theory of Magnetic Fields and its basic concept. We all know that magnets exert forces on each other, and its magnetic force is distributed around. Magnetic field lines are used to describe these forces around the magnet. We understand that magnets have two poles and that depending on the orientation of two magnets there can be an attraction (opposite poles) or repulsion (similar poles). We also recognize that there is some region extending around a magnet where this happens, and this is explained by the magnetic field lines.
HOW TO MAP A BASIC MAGNETIC FIELD
Let's begin with the field lines of a bar magnet, perhaps the simplest case to analyze. In Figure 1, we can observe the magnetic field pattern of a bar magnet by scattering iron filings over it. As the filings are scattered around the magnet, they become temporary magnets (by magnetic induction) and line up end-to-end. The filings tend to clump together around the poles of the magnet, indicating that this is where the magnetic field is strongest. The lines of iron filings give an impression of the layout of the magnetic field. We also see all field lines begin at the north pole and terminate at the south pole.
CHARACTERISTICS OF MAGNETIC FIELD LINES
AN OVERVIEW OF MAGNETIC FIELD LINES AND ITS CHARACTERISTICS
The pictorial representation of magnetic field lines is very useful in visualizing the strength and direction of the magnetic field. Extensive exploration of magnetic fields has revealed a number of characteristics that help us understand them better. Below are the important characteristics of a magnetic field:
• Form a continuous closed loop• Elastic in nature• Takes path of least reluctance• Never intersect each other• Has direction from north to the
south pole, even though there is no actual movement
Figure 1: Iron filings create a pattern around a bar magnet
WHY ARE MAGNETIC FIELD LINES IMPORTANT?
Magnetic fields are used throughout modern technology, particularly in electrical engineering and electromechanics, and crucial for a technician to understand. Measuring magnetic field lines helps us calculate:
• The magnitude of the magnetic field• The direction of the magnetic field• Magnetic field intensity

29THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
This article reviews the theory of the Air gaps in magnetic circuits. A magnetic circuit is where a magnetic flux is circulated or follow through a closed area or path. An air gap is a non-magnetic part of a magnetic circuits and it is usually connected magnetically in series with the rest of the circuit. This allows a substantial part of the magnetic flux flows through the gap. Depending on application, air gap may be filled with a non-magnetic material such as gas, water, vacuum, plastic, wood etc. and not necessarily just with air. Well, what exactly is the function of the air gap?
WHY DO WE NEED AIR GAP IN A MAGNETIC CIRCUIT?
Consider a magnetic circuit with an air gap as below. Let’s discuss different reasons why air gaps are crucial in practical applications. In this circuit, there is only one path for the magnetic circuit and thus it can be called as a series magnetic circuit.
Figure 1: Series Magnetic Circuit with an Air gap
WHY DO WE NEED AN AIR GAP IN MAGNETIC CIRCUIT & HOW TO CALCULATE IT?
One of main reasons for an Air Gap is to increase the reluctance of the magnetic circuit. The amount of air or another non-magnetic material like a fibre plate or fibre board increases the reluctance of the circuit, thereby increasing the amount of current that we could put in a coil before we reach saturation. Also, the air gaps help the magnetic flux to expand outside the magnetic circuit. This flux fringes out into the neighbouring air path and such paths for flux are called flux fringing resulting in a non-uniform flux density in the air gap. As we increase the air gap, it increases flux fringing and vice versa. With small air gaps, fringing can be neglected unless otherwise noted. However, with a larger air gap we might have to take that change in area into consideration when we start doing flux density calculations.
Winding, N turns
Mean core length lc
Air gap, permeability μ0, Area Ag
Air gap length g
Magnetic core permeability μ, Area Ac
Magnetic flux lines
I+
–

30THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
WHY DO WE NEED AN AIR GAP IN MAGNETIC CIRCUIT & HOW TO CALCULATE IT?
HOW TO CALCULATE FLUX DENSITY IN AN AIR GAP?
Let’s look at the basic formula to calculate flux density.
Flux density, Bg = Φg / Ag
Where
B is magnetic flux density in Teslas (T)
Φ is magnetic flux in Webers (Wb)
A is area in square meters (m2 )
As we know that permeability of any material can be stated as the ratio of the magnetic flux density to the magnetic field intensity of a material. It can be expressed as below,
µ = B / H
Where
µ is permeability of a material, in henrys/meter
H is magnetic field strength, in ampere-turns/meter
B is flux density, in teslas
Solving the above equation for B, we get
Equation 1: B = µ × H
Now, magnetizing force of the air gap is determined as below,
Equation 2: H = Fm / l
Where
Fm is Magnetomotive force (mmf), in ampere-turns
l is length of material (gap), in meters
Substituting the value of H from Equation 2 into Equation 1, we get
B = µ × (Fm / l)
Solving the above equation for magnetomotive force, we get
Equation 3: Fm = Bl / µ
Let’s assume that we have an air gap, and the permeability of air (free space) is a constant
µair = 4π x 10-7 H / m
Replacing the value for µ in Equation 3, we come up with a very basic formula for determining the magnetomotive force required to set up a particular flux in an air gap.
Fm = BL / (4π × 10-7)
The air gap can take different form, shape and size depending on the type of magnetic circuit and its shape. In some circuits it might be actually an integral part ensuring correct performance of the device, but in other cases it should be as small as possible. Such requirements will be determined by the operating principle, performance, size, efficiency, and many other technological factors.

31THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
In electronics, filters serve a critical role in many common applications such as audio electronics, radio communications and power supplies. We use filters to block or pass a specific range of frequencies. The filters can be either passive or active. We usually divide filters into four main types, depending on which frequency components of the input signal they pass on to the output signal. The four types of filters are low-pass, high-pass, band-pass, and band-stop.
In this article, we will take a closer look at the band-pass filters and focus on their application in the crossover networks of the stereo system loudspeakers or the loudspeaker enclosures that are found in our homes. Individual loudspeakers have different efficiencies for various ranges of frequencies. For example, a woofer speaker, which is a large diameter speaker, typically has more efficiency for low frequencies or bass tones than the high-frequency signals.
Therefore, we need filters to direct the signals to the appropriate speakers in the loudspeaker enclosure. The utilization of low-pass filters, band-pass filters and high-pass filters prevents signals of a specific frequency range from getting through to a particular speaker, depending on the designated frequencies for each speaker.
In Figure 1 below, we have a diagram of a passive crossover three-way system. It contains speakers, namely Woofer, Midrange (Squawker) and Tweeter. The Woofer speaker is the most efficient from 0 Hz – 630 Hz, Midrange is operating from 630 Hz - 8 kHz, and Tweeter from 8 kHz and up.
Figure 1: Passive three-way crossover
AN OVERVIEW OF FILTERS IN A CROSSOVER NETWORK
Audio signal
Low-pass filter
High-pass filter
Band-pass filter
C
C
C
L
R
R
R
Tweeter8 kHz and up
5" Midrange630 - 8kHz
12" Woofer0 - 630 Hz

32THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
AN OVERVIEW OF FILTERS IN A CROSSOVER NETWORK
Coming into this crossover network is the audio signal spectrum which typically runs from 20 Hz up to 20 kHz. A low pass filter passes the frequencies from 0 – 630 Hz over to the Woofer. In the middle, the band-pass filter passes a band of frequencies that exist from 630 Hz up to 8 kHz. The high-pass filter passes any frequencies 8 kHz and above over to the Tweeter.
FREQUENCY RESPONSE CURVES
The response curves for the three different filters are shown below. Figure 2 (a) illustrates the response curve for the low-pass filter, which starts at a frequency of 0 Hz along the X-axis, with a bandwidth of 0 – 630 Hz. At the point of 630 Hz, the output achieves a value that is 70.7% of the maximum output value at the lower frequencies. This point is called the cutoff or critical frequency (fc) point.
Figure 2(a): Response curve for low-pass filter
In the high-pass filter – Figure 2 (b), the response curve has no response at the low frequencies, but at a frequency of 8 kHz, we have a response that is above 70.7% of the maximum value. This response is the output or the bandwidth of the high pass filter.
Figure 2(b): (a) High-pass active filter; (b) response curve
Vout / Vin
Frequency0
1
0.707 -3 dB
fcBW = 0 - 630 Hz
Vout / Vin
Frequency0
1
0.707
BW = 8 KHz and Upfc

33THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
So, there are three individual filters, with three separate responses, and the filters are directing the appropriate frequencies to the respective speakers. Depending on the design and purpose of the band-pass filter, the bandwidth may be very wide or very narrow. Overall, the crossover network has a net of a combined response of the three filters.
Gain (dB)
Frequency
0
-10
-20
-30
-40
f1 frf2
Bandwidth
fc fc
Hig
h-pa
ss fi
lter Low
-pass filter
630 Hz to 8 KHz
In the center of the crossover network is the band-pass filter – Figure 2 (c), which is designed to have a very sharp, defined frequency response. A band-pass filter is equivalent to combining a low-pass filter and a high-pass filter. The cut-off frequency (fc) of the high-pass section becomes the lower frequency limit in the passband f1. The upper frequency in the passband f2 is the result of the cut-off frequency in the low-pass section. The passband, or the bandwidth, is the difference between f2 and f1 points. The f1 is designed to be 630 Hz in this case, and the f2 is 8 kHz.
Figure 2(c): Response curve of a band-pass filter
AN OVERVIEW OF FILTERS IN A CROSSOVER NETWORK

34THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
Technicians often encounter values expressed in binary, octal, or even the hexadecimal number systems. This article focuses on characteristics that are common to all of these number systems.
The first thing to understand is that these are all weighted number systems which use columns of digits. As with the decimal system, the names of these other number systems denote the base or “radix” of the system. The base of a number system can be described as the number of states that can be represented by a single digit or column. For instance, the base 10 “decimal” system can represent 10 distinct states in a single digit place holder using symbols 0 – 9. Each of these number systems behave the same way with respect to the weighting of the columns used to represent groups when expressing multi-digit values. As you add columns to the left of the least significant digit, you increase the exponent you are raising the radix to by one.
WHAT IS MEANT BY POSITION WEIGHTING?
X3 X2 X1 X0
Binary (base 2) 8 4 2 1
Octal (base 8) 512 64 8 1
Decimal (base 10) 1000 100 10 1
Hexadecimal (base 16) 4096 256 16 1
When evaluating a value in a given number system, the above table illustrates the weight of the digits in each column for the given number system. We work with the decimal system daily, and it follows these rules as well. The decimal value 372, is evaluated as 3 groups of 100, 7 groups of 10, and 2 groups of 1. We apply this same general rule to all the above systems. For the octal value of 372, we would have 3 groups of 64, 7 groups of 8, and 2 groups of 1.
THE IMPACT OF SHIFTING DIGITS TO THE LEFT AND RIGHT
As a technician in the increasingly digital age, you may often come across the use of the binary or base 2 number system. As a consequence of the above stated nature of weighted number systems, shifting a given value to the left is the same as multiplying that value by the radix of the number system. Shifting a binary value to the left is the same as multiplying it by 2. Although most often used with binary values, this shifting as a form of multiplication is common to all weighted number systems. Conversely, if a binary value is shifted to the right, it is the same as dividing the value by 2 in the case of binary, or the radix of any other positional weighted number system. Again, we are already familiar with this fact, if not consciously, by our extensive usage of the decimal system in everyday base 10 calculations. It is important to remember that this same basic principal can easily be applied to octal or hexadecimal values as well despite our unfamiliarity with these special purpose number systems.
COMMON RULES FOR WEIGHTED NUMBER SYSTEMS

35THE PRACTICING ELECTRONICS TECHNICIAN’S SERIES
THE NUMBER OF AVAILABLE STATES FOR A GIVEN NUMBER OF DIGITS
Weighted number systems have other common properties. To calculate the total number of states that can be represented by a given number of digits in a particular number system, we simply raise the radix of the system, to the power of the number of digits we are using. The resulting value represents how many distinct states that are available with that many digits in that particular number system.
radixnumber of digits = Total Number Of States Available
THE HIGHEST VALUE FOR A GIVEN NUMBER OF DIGITS
To calculate the highest value that can be represented by a given number of digits in a particular number system, we simply subtract one from the calculation for available states. This is due to the fact that in each system, “0” is one of the states represented.
radixnumber of digits – 1 = Highest Value That Can Be Represented
Working with different weighted number systems may seem a bit intimidating until you remember that these alternate base number systems follow the same rules as the decimal number system which we work with every day.
WEIGHTED NUMBER SYSTEMS

2 KEY EQUATIONS

37KEY EQUATIONS
1. Current, Voltage & Resistance
Equation 1.1
I = Q / tI = current in AmperesQ = charge transferred, in Coulombst = time in Seconds
Equation 1.2
E = W / QE = potential difference in VoltsW = energy in JoulesQ = quantity of charge in Coulombs
Equation 1.3
R = ρ * l / AR = resistance of material in Ohmsρ = constant of proportionality in Ohms
per Meterl = length in MetersA = cross-sectional area in Square Meters
Equation 1.4
A in circular mils = d2
A = area in Circular Milsd = diameter in Mils
Equation 1.5
R2 = R1 * ( 1 + α ∆T ) R1 = original resistance in OhmsR2 = new resistance in Ohmsα = temperature co-efficient∆T = T2 – T1 = temperature change in Degrees
2. Ohm’s Law, Power & Energy
Equation 2.1
R = E / IR = resistance in OhmsE = potential difference in VoltsI = current in Amperes
Equation 2.2
P = E * I P = power in WattsE = potential difference in VoltsI = current in Amperes
3. Series Circuits
Equation 3.1
Rt = R1 + R2 ….. + Rn
Rt = equivalent total resistance in OhmsR1, R2 = series resistor values in OhmsRn = resistance of last series resistance in
Ohms
Equation 3.2
VRx = E ( Rx / Rt )E = applied potential difference in VoltsVRx = potential difference across series resistor
in VoltsRx = series resistor value in OhmsRt = total series resistance in Ohms
4. Parallel Circuits
Equation 4.1
1 / Req = 1 / R1 + 1 / R2 …. + 1 / Rn
Req = equivalent resistance of all parallel resistors in Ohms
R1, R2 = resistance of each parallel resistor in Ohms
Rn = resistance of last parallel resistor in Ohms
Equation 4.2
I1 = It * [ R2 / ( R1 + R2 ) ]It = total current flowing in AmperesI1 = current in the branch with R1 in the parallel
circuit in AmperesR1, R2 = resistance of each of the two parallel
resistors in Ohms

38KEY EQUATIONS
Equation 4.3
I2 = It * [ R1 / ( R1 + R2 ) ]It = total current flowing in AmperesI2 = current in the branch with R2 in the parallel
circuit in AmperesR1, R2 = resistance of each of the two parallel
resistors in Ohms
Equation 4.4
Ix = It * ( Rt / Rx )It = total current flowing in AmperesIx = current through the desired resistor in
AmperesRx = resistance of the desired parallel resistor in
OhmsRt = total resistance of the resistors in parallel in
Ohms
5. Magnetism
Equation 5.1
B = Φ / AB = flux density in TeslasΦ = total field flux in WebersA = cross-sectional area in Square Meters
6. Magnetic Circuits
Equation 6.1
μ = B / Hμ = permeability of a material in Henrys
per MeterB = flux density in TeslasH = magnetic field strength in Ampere-turns per
Meter
Equation 6.2
μr = μ / μo μr = Relative permeability of materialμ = Absolute permeability of materialμo = permeability of free space = π * 4e-7 Henrys
per Meter
Equation 6.3
Hg = Bg / μo Hg = magnetic field strength of air gap in
Ampere-turns per MeterBg = flux density of air gap in Teslasμo = permeability of free space = π * 4e-7 Henrys
per Meter
Equation 6.4
B = ( F / l ) * μB = flux density in TeslasF = magnetomotive force in Ampere-turnsl = length of material in Metersμ = permeability of material in Henrys per Meter
7. Alternating Voltages and Currents
Equation 7.1
f = 1 / T f = frequency in HertzT = period time in Seconds
Equation 7.2
λ = 300000000 / f λ = wavelength in Metersf = frequency in Hertz
Equation 7.3
e = EP * sin θ e = instantaneous voltage value in VoltsEP = peak sine wave voltage in Voltsθ = phase angle in Degrees
Equation 7.4
e = EP * sin 2πfte = instantaneous voltage value in VoltsEP = peak sine wave voltage in Voltsf = frequency in Hertzt = time in Seconds

39KEY EQUATIONS
Equation 7.5
Eave = EP * ( 2 / π ) Eave = average voltage value ( ½ cycle ) in VoltsEP = peak sine wave voltage in Volts
Equation 7.6
Erms = EP / √2Erms = root mean square (effective) voltage value
in VoltsEP = peak sine wave voltage in Volts
8. Capacitance & Capacitors
Equation 8.1
C = Q / VC = capacitance in FaradsQ = charge in CoulombsV = potential difference in Volts
Equation 8.2
C = ( ϵr * ϵo * A ) / d C = capacitance in Faradsϵr = relative permittivity of material (dielectric
constant)ϵo = absolute permittivity of vacuumA = area of plates in Square Metersd = distance between plates in Meters
Equation 8.3
τ = R * Cτ = time constant in SecondsR = resistance in OhmsC = capacitance in Farads
Equation 8.4
Vc = E * ( 1 - e -t/τ ) Vc = capacitor voltage at time t in VoltsE = supply voltage in Voltse = exponential constant 2.71828τ = time constant time in Secondst = desired time from charge commencing
in Seconds
Equation 8.5
Vc = E * e -t/τ Vc = capacitor voltage at time t in VoltsE = supply voltage in Voltse = exponential constant 2.71828τ = time constant in Secondst = desired time from decay commencing in
Seconds
Equation 8.6
1/Ct = 1 / C1 + 1/ C2 … + 1/Cn
Ct = total series capacitance in FaradsC1, C2 = capacitance of each series capacitor
in FaradsCn = capacitance of last series capacitor
in Farads
Equation 8.7
Ct = C1 + C2 …. + Cn
Ct = total capacitance in FaradsC1, C2 = capacitance of each parallel capacitor
in FaradsCn = capacitance of last parallel capacitor
in Farads
9. Inductance & Inductors
Equation 9.1
L = ( μ * N2 * A ) / lL = inductance in Henrysμ = permeability of magnetic pathN = total number of turns of coilA = area in square Metersl = length of coil in Meters
Equation 9.2
Lt = L1 + L2 ….. + Ln
Lt = total inductance of series inductors in Henrys
L1, L2 = inductance of each series inductor in Henrys
Ln = inductance of last series inductor in Henrys

40KEY EQUATIONS
Equation 9.3
1 / Lt = 1 / L1 + 1 / L2 … + 1 / Ln Lt = total parallel inductance in HenrysL1, L2 = inductance of each parallel inductor in
HenrysLn = inductance of last inductor in parallel in
Henrys
Equation 9.4
Lt = ( L1 * L2 ) / ( L1 + L2 )Lt = total inductance of two parallel inductors in
HenrysL1, L2 = inductance of each parallel inductor in
Henrys
Equation 9.5
Lt = [ L1 * L2 * ( 1 – k2 ) ] / [ L1 + L2 - 2 * k * √( L1 * L2 ) ]
Lt = total inductance of two parallel inductors with mutual inductance in Henrys
L1, L2 = inductance of each parallel inductor in Henrys
k = coefficient of coupling
Equation 9.6
τ = L / Rτ = time constant time in SecondsR = resistance in OhmsL = inductance in Henrys
Equation 9.7
IL = ( E / R ) * ( 1 - e –t*(R/L) ) IL = inductor current in AmperesE = supply voltage in Voltse = exponential constant 2.71828R = resistance in OhmsL = inductance in Henryst = desired time from charge commencing in
Seconds
Equation 9.8
IL = I * e -t/τ IL = inductor current at time t in Amperes
I = current flowing in coil just prior to start of decay in Amperes
e = exponential constant 2.71828τ = time constant time in Secondst = desired time from decay commencing in
Seconds
10. Transformers
Equation 10.1
EP = 4.44 * Φpm * f * NP
EP = effective voltage induced into primary in Volts
Φpm = peak mutual flux in Webers
f = frequency of applied voltage in HertzNP = number of turns in primary coil
Equation 10.2
ES = 4.44 * Φpm * f * NS
ES = effective voltage induced into secondary in Volts
Φpm = peak mutual flux in Webers
f = frequency of applied voltage in HertzNS = number of turns in secondary coil
Equation 10.3
EP / ES = NP / NS = IS / IP = a EP = primary voltage in VoltsES = secondary voltage in VoltsNP = number of turns in the primary coilNS = number of turns in the secondary coilIS = secondary current in AmperesIP = primary current in Amperesa = transformation ratio
Equation 10.4
RP = a2 * RL RP = reflected resistance at the primary in Ohmsa = transformation ratioRL = load resistance of secondary in Ohms

41KEY EQUATIONS
11. Alternating Current Circuits
Equation 11.1
e = Im * R * sin (ω * t )e = instantaneous voltage value in VoltsIm = maximum current value in AmperesR = circuit resistance in Ohmsω = angular velocity in Radians per secondt = time in Seconds
Equation 11.2
XL = 2 * π * f * LXL = inductive reactance in Ohmsf = frequency in HertzL = inductor inductance value in Henrys
Equation 11.3
XLT = XL1 + XL2 + … XLN
XLT = total series inductive reactance in OhmsXL1, XL2 = series inductive reactance
values in Ohms
Equation 11.4
1 / XLT = 1 / XL1 + 1 / XL2 + … 1 / XLN
XLT = total parallel inductive reactance in OhmsXL1, XL2 = parallel inductive reactance values in
Ohms
Equation 11.5
XC = 1 / ( 2 * π * f * C )XL = capacitive reactance in Ohmsf = frequency in HertzC = capacitor capacitance in Farads
Equation 11.6
XCT = XC1 + XC2 + … XCN
XCT = total series capacitive reactance in OhmsXC1, XC2 = series capacitive reactance values
in Ohms
Equation 11.7
1 / XCT = 1 / XC1 + 1 / XC2 + … 1 / XCNXCT = total parallel capacitive reactance in OhmsXC1, XC2 = parallel capacitive reactance values
for each in Ohms
Equation 11.8
Z = ( E / I )Z = impedance in OhmsE = voltage in VoltsI = current in Amperes
Equation 11.9
Z = √ [ R2 + X2 ]I = total impedance in OhmsR = resistance in OhmsX = net reactance in Ohms
Equation 11.10
θ = tan-1 ( X / R )θ = impedance phase angle in DegreesR = resistance in OhmsX = net reactance in Ohms
Equation 11.11
θ = sin-1 ( XL / Z ) = cos-1 ( R / Z ) = tan-1 ( XL / R )
θ = impedance phase angle in DegreesR = resistance in OhmsZ = impedance in OhmsXL = inductive reactance in Ohms
Equation 11.12
XL = Z sin θ θ = impedance phase angle in DegreesZ = impedance in OhmsXL = inductive reactance in Ohms

42KEY EQUATIONS
Equation 11.13
R = Z cos θ θ = impedance phase angle in DegreesZ = impedance in OhmsR = resistance in Ohms
Equation 11.14
XL = R tan θ θ = impedance phase angle in DegreesXL = inductive reactance in OhmsR = resistance in Ohms
Equation 11.15
Z = ( R * XL ) / √( R2 + XL2 ) …and…
θ = tan-1 ( R / XL )θ = impedance phase angle in DegreesR = resistance in OhmsZ = impedance in OhmsXL = inductive reactance in Ohms
Equation 11.16
E = √( VR2 + VC2 ) E = applied voltage in VoltsVR = voltage across the resistor in VoltsVC = voltage across the capacitor in Volts
Equation 11.17
-θ = sin-1 ( XC / Z ) = cos-1 ( R / Z ) = tan-1 ( XC / R )
θ = impedance phase angle in DegreesR = resistance in OhmsZ = impedance in OhmsXC = capacitive reactance in Ohms
Equation 11.18
Z = ( R * XC ) / √( R2 + XC 2 ) R = resistance in OhmsZ = impedance in OhmsXC = capacitive reactance in Ohms
Equation 11.19
-θ = tan-1 ( R / XC )θ = impedance phase angle in DegreesR = resistance in OhmsXC = capacitive reactance in Ohms
Equation 11.20
IT = √( IR2 + IC2 ) IT = total current in AmperesIR = current through the resistor in AmperesIC = current through the capacitor in Amperes
Equation 11.21
θ = tan-1 ( IC / IR )θ = current phase angle in DegreesIR = current through the resistor in AmperesIC = current through the capacitor in Amperes
Equation 11.22
E = √ [ VR2 + ( VL - VC )2 ] E = applied voltage in VoltsVR = voltage across the resistor in VoltsVC = voltage across the capacitor in VoltsVL = voltage across the inductor in Volts
Equation 11.23
θ = tan-1 ( VL - VC ) / VR θ = impedance phase angle in DegreesVR = voltage across the resistor in VoltsVC = voltage across the capacitor in VoltsVL = voltage across the inductor in Volts
Equation 11.24
Z = √( R2 + X2 ) …..and….
θ = tan-1 ( X / R )θ = impedance phase angle in DegreesR = resistance in OhmsZ = impedance in OhmsX = net reactance in Ohms
Equation 11.25
IT = √( IR2 + IX2 ) IT = total current in AmperesIR = current through the resistor in AmperesIX = net current through the inductive element in
Amperes

43KEY EQUATIONS
Equation 11.26
θ = tan-1 ( IX / IR )θ = current phase angle in DegreesIR = current through the resistor in AmperesIX = net current through the inductive element in
Amperes
Equation 11.27
P = Erms * Irms * cos θP = True Power in an AC circuit in WattsErms = rms voltage applies in VoltsIrms = rms current in Amperesθ = phase angle in Degrees
Equation 11.28
S = E * II = current in AmperesE = voltage in VoltsS = apparent power in Volt-Amperes or VA
Equation 11.29
PF = ( Erms * Irms * cos θ ) / ( Erms * Irms )PF = cos θPF = power factorErms = rms voltage applies in VoltsIrms = rms current in Amperesθ = phase angle in Degrees
Equation 11.30
PF = R / ZPF = power factorR = circuit resistance in OhmsZ = circuit impedance in Ohms
Equation 11.31
Q = Erms * Irms * sin θQ = reactive power Volt-Ampere-Reactive or
VARsErms = rms voltage applied in VoltsIrms = rms current in Amperes
Equation 11.32
S = √( P2 + Q2 )S = apparent power in Volt-Amperes or VAP = true power in WattsQ = reactive power Volt-Ampere-Reactive or VARs
12. Resonance
Equation 12.1
fr = 1 / [ 2 * π * √( L * C ) ]fr = series resonant frequency in HertzL = inductor inductance value in HenrysC = capacitor capacitance value in Farads
Equation 12.2
Q = (1 / Rs ) * √( L / C )Q = quality factor or voltage magnification factor
of series resonant circuitRS = series resistor resistance value in OhmsL = inductor inductance value in HenrysC = capacitor capacitance value in Farads
Equation 12.3
BW = fr / QBW = band width in Hertzfr = resonant frequency in HertzQ = quality factor of resonant circuit
Equation 12.4
Zr = ( XL* XC ) / R = L / ( R * C )Zr = impedance of parallel resonant circuit in
OhmsXL = inductive reactance in OhmsXC = capacitive reactance in OhmsL = parallel inductor inductance value in HenrysR = parallel resistor resistance value in OhmsC = parallel capacitor capacitance value in
Farads
Equation 12.5
dB = 10 log10 ( Pout / Pin )dB = decibels, provides power gainPout = output power in WattsPin = input power in Watts
Equation 12.6
dB = 20 log10 ( Vout / Vin )dB = decibels, provides voltage gainVout = output voltage in VoltsVin = input voltage in Volts

3 SUPPLEMENTAL CONTENT

45SUPPLEMENTAL CONTENT
SCIENTIFIC NOTATION
Scientific Notation allows you to express very large and very small numbers in an efficient way. In Scientific Notation, a number between 1 and 10 is multiplied by a power of ten.
For example, it allows you to express the number
82300 like this: 8.23 x 104
The power of ten tells you how many places the decimal moves. Here, the decimal moves 4 places.
CONVERTING FRACTIONS
Scientific Notation is useful for working with fractions. Count how many digits you need to move the decimal to the right so that only one significant digit remains to the left of the decimal place.
Since you moved the decimal place from the left to the right the power of ten is negative!
CONVERTING WHOLE NUMBERS
For fractions, the decimal moves to the right. When you convert a whole number to Scientific Notation, the decimal moves to the left.
When the decimal place moves to the left, it is important to remember that the power of ten is positive.
SCIENTIFIC NOTATION INTO A REGULAR NUMBER
Let’s look at the opposite.
To convert Scientific Notation into a regular number you are simply carrying out multiplication. The power of ten tells you the number of places the decimal will move.
For example, to convert 7.821 x 104 into a regular number simply multiply 7.821 x 10 000 = 78 210.
Here, the decimal moves 4 places when you multiply by 10 000.
NOTATION
EXAMPLE
0.045 = 4.5 x 10-2
8730 = 8.73 x 103
0.00748 = 7.48 x 10-3
691 = 6.91 x 102
EXAMPLE
0.0015 = 1.5 x 10-3
The exponent has a negative power because we moved the decimal three places to the right.
EXAMPLE
12345 = 1.2345 x 104
The power to ten is positive since we moved the decimal to the left.
EXAMPLE
4.5 x 10-2 = 0.0458.73 x 103 = 87307.48 x 10-3 = 0.007486.91 x 102 = 691

46SUPPLEMENTAL CONTENT
NOTATION
WHY WE NEED TO USE SCIENTIFIC NOTATION
Calculations require standard measures. The system of standard measures we use is called SI units.
For example, when we talk about distance we use meters. Meters are a standard SI unit. When we talk about mass we use kilograms and so on. Now, what if we want to use a quantity that is extremely large or small in our calculations?
Scientific Notation provides a way of expressing them efficiently.
ENGINEERING NOTATION
Engineering notation is similar to scientific notation except that the exponent must be a multiple of three (3, 6,9,12 and so on). To convert a number to engineering notation, you move the decimal place in groups of 3 until the base number is between 1 to 999. The number of places you moved the decimal now becomes the exponent of ten for the number.
EXAMPLE
EXAMPLE
The Sun is 1980 billion billion billion kilograms. That’s 198 followed by 28 Zeros! Scientific Notation can express this number more efficiently as 1.98 x 1030.
Since 1 x 103m is equal to 1 km, 23,000m is equal to 23 x 103m which is equal to 23 km.
Number Scientific Notation Engineering Notation
0.00075 7.5 x 10-4 750 x 10-6
890000 8.9 x 105 890 x 103
8730 8.73 x 103 8.73 x 103
691 6.91 x 102 691
For example:
WHY WE NEED TO USE ENGINEERING NOTATION
For example, the distance from Toronto to Kingston is about 3 x 105 m or equivalently 300 x 103 . Remember the metric system?
103 can also be expressed as kilometers. Now, most people immediately know how much 300 km is but it takes a little more work to visualize 3 x 105 m.
Toronto
Kingston
Lake Ontario
3 x 102 km3 x 105 m

47SUPPLEMENTAL CONTENT
Every substance in the universe is electrically charged.
Substances are either:
ELECTRIC CHARGES
Positively charged (excess protons)
Negatively charged (excess electrons)
Neutrally charged (equal protons and electrons)
Neutral substances have a balance of positive and negative charges.
SI UNIT FOR CHARGE
The coulomb (C) is the standard international (SI) unit for charge.
The coulomb is named after French scientist Charles Coulomb, whose work greatly advanced the study of electricity and magnetism.
What does one coulomb of charge mean?
Let’s look at coulombs in practical terms: A typical lightning bolt contains about 20 to 30 C of charge. An electron has a charge of -1.60 x C10-19. Thus, 1 C of charge contains 6.24 x 1018 electrons.
Indeed, 1 C is an enormous amount of charge!
INTERACTION OF CHARGES
How do charges interact with each other?
• Charges with the same electrical sign repel each other.
• Charges with opposite electrical signs attract each other.
What causes a positive charge to attract a negative charge and repel a positive charge? The answer leads to the concept of the electric field.
Positively charged(excess protons)
Negatively charged(excess electrons)
Neutrally charged(equal protons and electrons)

48SUPPLEMENTAL CONTENT
ELECTRIC CHARGES
ELECTROSTATIC LINES OF FORCE
All charges have an electric field around them. An electric field can be represented by electrostatic lines of force.
Remember:
• The electric field strength increases as the amount of charge increases.
• The electric field strength decreases as the distance from the charge increases.
For a positive charge the electric field (lines of force) points outwards in all directions from the charge.
For a negative charge the field (lines of force) points inwards in all directions towards the charge.
ELECTRIC FIELD
Now we can answer the question:
“What causes a positive charge to attract a negative charge and to repel a positive charge?”
The answer is that even though the two charges are not touching, each is exposed to the electric field of the other.
• Positive charges move in the direction of the electric field
• Negative charges move in a direction opposite to the field
The positive charge tends to move toward the negative charge (field of the negative charge points inwards)
The negative charge tends to move towards the positive charge (field for the positive charge points outward
WHEN POSITIVE AND NEGATIVE CHARGES ARE PLACED TOGETHER:
When two positive charges are placed together each of them will move away from the other because the electric field for each is outward

49SUPPLEMENTAL CONTENT
THE LAW OF CONSERVATION CHARGE
The Law of Conservation of Charge states that electric charges within a system cannot be created or destroyed. Charge is only transferred from one object to another.
Consider an example: Someone runs across a carpet to open a door.
Slippers, rubbing against the carpet, pick up extra electrons from the carpet.
The girl is negatively charged. The carpet is positively charged, since it has lost electrons.
What is the result of this system?
ELECTRIC CHARGES
Free electrons from the knob are initially repelled by her negatively charged body.
Significantly, the total charge within this system (the room) remains constant. Charge is simply transferred from carpet to person and then to the doorknob.
WHY WE NEED TO KNOW ABOUT CHARGES
Understanding charges and how they interact is essential to understanding current.
WHEN SHE REACHES FOR THE METAL DOORKNOB:
The doorknob becomes deficient in negative electron charge.
The excess electrons from the girl become attracted to the doorknob (opposite charges attract). The charges jump from her hand to the doorknob, creating a spark!

50
PRACTICAL EXAMPLE
You arrive home after a long day of work. You open the door and turn on the light. Nothing happens! The light bulb has burned out.
To understand what happens when light bulbs burn out requires understanding the concept of electrical resistance.
RESISTANCE
Resistance is defined as the property of a device or a circuit that opposes the movement of current through it.
Measuring the resistance requires applying voltage to a circuit. Then measure the current passing through it.
Resistance is measures in ohms (Ω). By definition, when 1 volt is applied, a circuit’s resistance equals 1 ohm if 1 ampere of current flows.
Let‘s look at ohms of resistance in practical terms:
• A typical television cable has a resistance of 50Ω to 75Ω
• The human body has a resistance of 10kΩ.
• A good insulator has a resistance of over 1MΩ.
HIGH VERSUS LOW RESISTANCE
The higher an object’s resistance, the less current it conducts. The lower an objects resistance, the more current it conducts.
High Resistance
Insulating material on electrical wires typically has an extremely high resistance. This high resistance prevents dangerous current flow.
Low Resistance
Electrical wires, however, have a very low resistance. Electrical wires are designed to conduct high currents.
SUPPLEMENTAL CONTENT
RESISTANCE
CALCULATION
The resistance of an object can be determined by dividing the value of the voltage by that of the current.
R = VI
Electrical Wires

51SUPPLEMENTAL CONTENT
RESISTANCE
RESISTANCE AND LENGTH
A material’s resistance depends on several things:
• Length
• Cross-sectional area
• Material and
• Temperature
Given a length of copper wire with a fixed cross-sectional area and temperature:
• A longer length of the same wire contains more material for electrons to pass through and therefore has more resistance.
• A shorter length of the same wire contains less material for the electrons to pass through and therefore has less resistance.
Changing the type of material (i.e. from copper to aluminum) will also alter the resistance.
RESISTANCE AND CROSS-SECTIONAL AREA
An object’s resistance depends on its cross-sectional area. More cross-sectional area allows more electrons to flow through the object at the same time.
More electrons passing through an object (it has more current) means the object’s resistance is lower.
Less cross-sectional area means fewer electrons can flow through the object at the same time. Less cross-sectional area, then, means the object’s resistance is higher.
CROSS-SECTIONAL AREA – AN EXAMPLE
Consider the analogy of water flow through a pipe:
Given the fixed water pressure, a large pipe allows more water to pass through it in a given period of time than a small pipe.
Given a fixed length, materials and temperature, a large wire (larger cross-sectional area) allows more electrons to pass through it than a small wire (smaller cross-sectional area).
Standard copper wire
Coaxial cable
Large pipeLarge cross-section
Small pipeSmall cross-section

52SUPPLEMENTAL CONTENT
RESISTANCE AND MATERIAL
An object’s resistance also depends on what it is made of. Some materials, due to their atomic structure, allow more electrons to flow than others.
RESISTANCE & TEMPERATURE
An object’s resistance also depends on its temperature.
Higher Temperature
As an object’s temperature increases:
• The vibration of atoms increases.
• Increased vibration increases the likelihood that electrons collide with atoms.
• More collision means it’s more difficult for electrons to flow.
• Vibration due to heat, therefore, means greater resistance.
Lower Temperature
The cooler the object is:
• There is less vibration of atoms
• Electrons are less likely to collide with atoms.
• Less collision means it’s easier for electrons to flow.
• With less vibration, cooler objects, therefore, have less resistance.
RESISTIVITY
Resistivity is defined as the resistance of a conductor having unit length and unit cross-sectional area. The unit for resistivity is Ω x m.
Remember: Resistance is a property of an object. Resistivity is a property of a material.
When comparing various conductors, it is better to focus on resistivity rather than resistance. After all, a conductor’s resistance depends on its length and cross-sectional area.
RESISTANCE
Silver1.64 x 10-8
Gold2.45 x 10-8
Copper1.72 x 10-8

While a conductor’s resistivity does not. An objects resistance can be determined by:
• Multiplying the resistivity of the material of which the object is composed (ρ)
• By the length of the object ( l )
• And dividing that product by the cross-sectional area (A)
Where:
WHY THE LIGHT BULB BURNS OUT
Understanding resistance and variables that affect resistance allows us to solve the case of the burned-out light bulb.
• Assuming an incandescent light bulb, the light bulb works by using electricity to heat a metal filament. The heat energy in the filament produces light.
• In order for the filament to produce light it is heated to a very high temperature.
• This is achieved by supplying a constant 110V voltage across two terminals of a light bulb.
However:
• Due to the heat the metal filament evaporates over time.
• Evaporation causes the cross-sectional area of the filament to decrease.
• This decrease in cross-sectional area increases the filaments resistance.
• The increased resistance causes more heating action between the electrons and the filament.
• Increased heat, in turn, again increases the evaporation rate of the filament.
This cycle continues until part of the filament completely evaporates.
• The incandescent light bulb burns out when the filament breaks.
53SUPPLEMENTAL CONTENT
RESISTANCE
R = ρ x IA
R = resistance of material in ohms
l = length of current path through the conductor in meters
A = cross-section area of conductor, in meters squared
ρ = the resistivity of the material

54SUPPLEMENTAL CONTENT
RC CIRCUITS
RC means resistor-capacitor.
The simplest form of an RC circuit consists of:
• capacitor
• resistor
• voltage source
TRANSIENT STATE
Consider driving a car:
• When you press on the gas, the car accelerates.
• When you step on the brakes, the car slows down.
• However, you cannot start or stop the car instantly. The car must first speed up or slow down.
A car cannot move at 40 km/h at one instant and 20 km/h the next. The motion must be continuous. When the car is accelerating or decelerating, it is in a period of transition.
The period of transition is called a transient state.
TRANSIENT STATE – RC CIRCUITS
The concept of the transient state applies to RC circuits.
In RC circuits, voltage across a capacitor must be continuous.
When a switch is turned ON, for example, the voltage applied to the RC circuit will instantly jump from 0V to 12V. When the switch is turned off the voltage applied to the RC circuit will instantly fall from 12V to 0.
The voltage won’t jump, however, at the terminals of the capacitor in an RC circuit. Like the car, there must be a transition period during which a capacitor charges or discharges.
This period is called the transient state.
RC CIRCUITS
R
Es C
Charging of CapacitorRC Circuit
R
t1
Es C
t1
Vc
0Time
Charging of CapacitorRC Circuit
R
t1
Es C
t1
Vc
0Time

55SUPPLEMENTAL CONTENT
RC CIRCUITS
TIME CONSTANT
In car racing, 0-100 km/h is used for determining a car’s acceleration.
A similar comparison is used for charge and discharge in RC circuits.
Time elapsed after switching is given in terms of multiples of time constants, or τ (tau).
EXAMPLE
At 1 time constant or 1 tau often a capacitor has started to charge through a resistor, the voltage on the capacitor has increased by 1-e-1 (approximately 0.67 of the applied voltage).
Time (Constant)Charged,
1-e-t/τ ( % of final value)
Discharged,e-t/τ
( % of initial value)
1τ 63% 37%
2τ 87% 14%
3τ 95% 5.0%
4τ 98% 1.8%
5τ 99% 0.67%
Note: When the charging time elapsed exceeds 5 time constants, then the voltage is more than 1% of the initial value for discharging. (0.9933, to be precise. See table above.)
After 5 time constants, the voltage and current have approximated their final values for charging.
• Voltage and current values from time of switching to 5 time constants (tau) are known as the transient response.
• Voltage and current values after 5 time constants (tau) are known as the steady state response.

1
2
3
R
Rotary switch
EA C
+
—
+
—
1
2
R1
2
3EA C
+
—
+
—
Vc
0Time
Rising Curve
1
2
Charging Current5τ
5τ
Vc
Time
1
2
3
R
EA C
+
—
+
—
1
2
56SUPPLEMENTAL CONTENT
RC CIRCUITS
TRANSIENT RESPONSE
To calculate the transient response of an RC circuit:
1. Find the time constant. Remembering τ = RC.
2a. If the capacitor is charging, use VC = E (1-e-t/τ ) , where E is the voltage applied to the RC circuit.
2b. If the capacitor is discharging, use VC = Ee-t/τ , where E is the initial voltage across the capacitor.
3. Once Vc is found, the transient current in the circuit can be determined.
R and C not connected to EA (open circuit).
VC = 0V.
The switch is connected to position #1. The charging actions of the capacitor begins.
If the switch is connected to position #2 after 5τ the voltage VC will remain at VC = EA indefinitely.

57SUPPLEMENTAL CONTENT
RC CIRCUITS
If switch is connected to position #3, the charged capacitor will discharge through R. After 5τ the voltage on the capacitor will have dropped to zero for all practical purposes.
After two cycles of moving through switch positions this is what the waveform will look like.
5τ
Vc
Time
Falling Curve
1
2
3
R
EA C
+
—
+
—
1
2
Discharging Current
5τ 10τ 15τ 20τ0τ
Vc
Time
Voltmeter Leads
1
2

58SUPPLEMENTAL CONTENT
1. CellA basic building block for a DC power source. Cells
are combined to form batteries.
2. Battery
A battery has more than one cell and provides a
relatively constant amount of voltage between the
positive and negative terminal.
3.AC Power
Supply
Represents the “Alternating Current” or AC type of
supply in an electrical circuit.
4. SPST SwitchSwitch has the basic function of interrupting the
current flow and creating an open (or broken) circuit.
5. ResistorResists the current flowing through a device or
opposes the current flow in a circuit.
6. Capacitor
Capacitor is a storage device used to store electrical
energy by separating two opposing charges, i.e.,
positive, and negative.
7. Inductor (Coil)
Inductor is a passive two terminal component that
stores electrical energy in the form of a magnetic field,
when electric current flows through it.
8. DiodeDiodes are components that allows electricity to
flow in a single direction but acts against its flow in
opposite direction.
We all are surrounded by electronic devices including phones, laptops, TV etc, but did you ever wonder what these things are made of? Most people might answer circuits which is correct to a point. A circuit is a closed path that allow electricity to flow from one end to another and made of various individual components such as resistors, capacitors, inductors etc.
The schematic symbols for these components are largely standardized today. In this article you will be introduced to top 10 important schematic symbols as per ANSI standards (American National Standards Institute).
TOP 10 MOST IMPORTANT SCHEMATIC SYMBOLS FOR DESIGNING CIRCUITS

59SUPPLEMENTAL CONTENT
TOP 10 MOST IMPORTANT SCHEMATIC SYMBOLS FOR DESIGNING CIRCUITS
Anyone interested in learning electronics should start with identifying these 10 electronic components. Once you have mastered these you can move forward to more complex components; join them to form desired circuits and before you know it you will be assembling and soldering the circuits. You can also use a simulation tool, like CircuitLogix, to build, test and troubleshoot more advanced circuits.
9.BIT NPN Transistor
Transistor is an electronic component that amplifies
signals or acts as switch in a circuit.
10.Earth
Ground
Reference point in an electrical circuit, where voltage
can be measured as zero.

2021 UPDATE - THE PRACTICING ELECTRONICS TECHNICIAN’S HANDBOOK - SECOND EDITION
The Practicing Electronics Technician’s Handbook serves as a useful tool to technicians who are in training and in the workforce. It is a text designed to provide guidance by illustrating important concepts, key equations, and supplemental content that is relevant to the field.
To learn more about George Brown College School of Distance Education Technical Training, visit www.gbctechtraining.com
For specific information about each of our Online Certificate Programs, visit the following sites:
Automation Technician Certificate Program - www.automationprogram.com
Electronics Technician Certificate Program - www.etcourse.com
Electromechanical Technician Certificate Program - www.emcourse.com
Programmable Logic Controllers Technician Certificate Program - www.plctechnician.com
Robotics Technician Certificate Program - www.onlinerobotics.com
Any questions? Speak to a Program Consultant toll-free at 1 888-553-5333 or email us at [email protected].
www.gbctechtraining.com