The Physical Pendulum and the Onset of Chaosggilfoyl/compphys/slides/chaos... · The Physical...
45
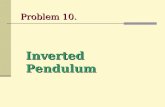
The Physical Pendulum and the Onset of Chaos Consider the uniform rod rotating about an end point in the figure. Starting from the definition of the torque τ = r × F , (1) derive the differential equation the angular posi- tion θ must satisfy. (2) Derive a new differential equation if the pendu- lum is damped by a friction force F f = -bv where b is some constant describing the the pendulum. (3) Derive a final differential equation if the pen- dulum is now also driven by a force F drive = F D sin(Ωt) ˆ θ. (4) Generate an algorithm for the differential equa- tion from Part 3. (5) What does the phase space look like for each set of conditions if the initial conditions are θ 0 = 25 ◦ and ω 0 =0 rad/s or θ 0 = 24 ◦ and ω 0 =0 rad/s? m mgsin θ g θ O C mgcos θ L Chaos – p. 1/3
Transcript of The Physical Pendulum and the Onset of Chaosggilfoyl/compphys/slides/chaos... · The Physical...

The Physical Pendulum and the Onset of Chaos
Consider the uniform rod rotating about an endpoint in the figure. Starting from the definition ofthe torque ~τ = ~r × ~F ,
(1) derive the differential equation the angular posi-tion θ must satisfy.
(2) Derive a new differential equation if the pendu-lum is damped by a friction force ~Ff = −b~v whereb is some constant describing the the pendulum.
(3) Derive a final differential equation if the pen-dulum is now also driven by a force ~Fdrive =
FD sin(Ωt)θ.
(4) Generate an algorithm for the differential equa-tion from Part 3.
(5) What does the phase space look like for eachset of conditions if the initial conditions are θ0 = 25
and ω0 = 0 rad/s or θ0 = 24 and ω0 = 0 rad/s?
m
mgsin
θ
g
θ
O
C
mgcosθ
L
Chaos – p. 1/34

Getting Started - The Harmonic Oscillator
Hooke’s Law states that
Fs = −kx
where Fs is the restoring force ex-
erted by a spring and x is the dis-
placement from equilibrium where
there is no net force acting on the
mass. See example here.
1. What differential equation does x satisfy?
2. What is the solution?
3. How would you test the solution?
4. What is the physical meaning of the constants in the solution?
Chaos – p. 2/34

The Harmonic Oscillator - The Solution
The solution for Hooke’s Law is
x(t) = A cos(ωt + φ)
where x(t) is the displacement from equilibrium.
t0 1 2 3 4 5 6 7 8 9 10
x(t)
-1
-0.5
0
0.5
1
A Cosine Curve
Period
Amplitude
Phase
Chaos – p. 3/34

The Simple Harmonic Oscillator - An Example
A harmonic oscillator consists ofa block of mass m = 0.33 kgattached to a spring with springconstant k = 400 N/m. See thefigure below. At time t = 0.0 s theblock’s displacement from equi-librium and its velocity are y =0.100 m and v = −13.6 m/s. (1)Find the particular solution forthis oscillator. (2) Use a centeredderivative formula to generate analgorithm for solving the equationof motion.
Chaos – p. 4/34

The Pendulum - Stating the Problem
The simple pendulum is an example ofan oscillatory system where the restoringforce is provided by gravity. Consider thependulum shown in the figure.
1. What differential equation does θ
satisfy?
2. What differential equation does θ
satisfy for small angles?
3. What is the solution?
4. How would you test the solution?
5. What is the physical meaning of theconstants?
6. Redo Part 1 using torques.m
mgsin
mgcos θ
θ
θ
C
g
L O
Chaos – p. 5/34

The Simple Pendulum - The Solution
The solution for simple pendulum is
θ(t) = A cos(ωt + φ)
where θ(t) is the angular displacement from equilibrium.
t0 1 2 3 4 5 6 7 8 9 10
(t)
θ
-1
-0.5
0
0.5
1
Period
Amplitude
Phase
A Cosine Curve
Chaos – p. 6/34

Torque - Rotational Equivalent of Force
~F = m~a → ~τ = r ~F⊥
F
Chaos – p. 7/34

Linear → Rotational Quantities
Linear RotationalQuantity Connection Quantity
s s = rθ θ = s
r
vT vT = rω ω = vT
r= dθ
dt
aT aT = rα α = aT
r= dω
dt
KE = 1
2mv2 KER = 1
2Iω2
~F = m~a τ = rF⊥ ~τ = I~α
~p = m~v ~L = ~r × ~p ~L = I~ω
Chaos – p. 8/34

The Physical Pendulum and the Onset of Chaos
Consider the uniform rod rotating about an endpoint in the figure. Starting from the definition ofthe torque ~τ = ~r × ~F ,
(1) derive the differential equation the angular posi-tion θ must satisfy.
(2) Derive a new differential equation if the pendu-lum is damped by a friction force ~Ff = −b~v whereb is some constant describing the the pendulum.
(3) Derive a final differential equation if the pen-dulum is now also driven by a force ~Fdrive =
FD sin(Ωt)θ.
(4) Generate an algorithm for the differential equa-tion from Part 3.
(5) What does the phase space look like for eachset of conditions if the initial conditions are θ0 = 25
and ω0 = 0 rad/s or θ0 = 24 and ω0 = 0 rad/s?
m
mgsin
θ
g
θ
O
C
mgcosθ
L
Chaos – p. 9/34

Moments of Inertia
Chaos – p. 10/34

Nonlinear, Physical Pendulum Phase Space and Time Series
-0.4 -0.2 0.0 0.2 0.4
-0.4
-0.2
0.0
0.2
0.4
ΘHradL
ΩHr
adsL
Phase Space for Θ0=25oHredL, Θ0=24o
HblackL
0 5 10 15 20 25 30
-0.4
-0.2
0.0
0.2
0.4
tHsL
ΘHr
adL
Time Series for Θ0=25oHblueL, Θ0=24o
HgrayL
Chaos – p. 11/34

Nonlinear, Physical Pendulum Phase Space and Time Series
-0.4 -0.2 0.0 0.2 0.4
-0.4
-0.2
0.0
0.2
0.4
ΘHradL
ΩHr
adsL
Phase Space for Θ0=25oHredL, Θ0=24o
HblackL
0 5 10 15 20 25 30
-0.4
-0.2
0.0
0.2
0.4
tHsL
ΘHr
adL
Time Series for Θ0=25oHblueL, Θ0=24o
HgrayL
Chaos – p. 12/34

Nonlinear, Damped, Driven, Physical Pendulum Phase Space a ndTime Series
-10 -5 0 5 10 15
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
Phase Space for Θ0=25oHredL, Θ0=24o
HblackL
0 20 40 60 80-10
-5
0
5
10
15
tHsL
ΘHr
adL
Time Series for Θ0=25oHblueL, Θ0=24o
HgrayL
Chaos – p. 13/34

Code for Nonlinear, Damped, Driven, Physical Pendulum
( * Initial conditions and parameters * )
th0 = 25.0 * Pi/180; ( * initial position in meters * )
w0 = 0.0; ( * initial velocity in m/s * )
t0 = 0.0; ( * initial time in seconds * )
grav = 9.8; ( * acceleration of gravity * )
length = 14.7; ( * length of pendulum * )
mass = 0.245; ( * mass of pendulum * )
( * driving force amplitude and friction force. See below for mo re * )
qDrag = 0.6; ( * drag coefficient * )
DriveForce = 11.8; ( * DriveForce = 11.8; cool plot value * )
DriveFreq = 0.67; ( * driving force angular frequency * )
DrivePeriod = 2 * Pi/DriveFreq; ( * period of the driving force * )
( * step size * )
step = 0.10;
Chaos – p. 14/34

Code for Nonlinear, Damped, Driven, Physical Pendulum
( * limits of the iterations. since we already have theta(t=0) a nd we
have calculated theta(t=step) then the first value in the ta ble will
be for t=2 * step. * )
tmin = 2 * step;
tmax = 80.0;
( * condense the constants into coefficients for the appropria te terms. * )
f1 = 1 + (3 * qDrag * step/(2 * mass* length));
f2 = 3 * DriveForce * (stepˆ2)/(2 * length);
f3 = -3 * grav * (stepˆ2)/(2 * length);
f4 = -1 + (3 * qDrag * step/(2 * mass* length));
( * set up the first two points. * )
t1 = t0 + step;
th1 = th0 + w0 * step;
( * get rid of the previous results for the table and proceed * )
Clear[pdispl]
Clear[tdispl]
Chaos – p. 15/34

Code for Nonlinear, Damped, Driven, Physical Pendulum
( * A centered second derivative formula is used to generate an i terative
solution for the mass on a spring. first load the starting poi n. * )
thmid = th0; ( * starting value of theta * )
thplus = th1; ( * second value of theta * )
tmid = t0;
( * create a table of ordered (theta,w). for each component the n ext value
is calculated and then the variables incremented for the nex t interation.
pdispl = th0, w0;
tdispl = t0, th0;
Do[thminus = thmid;
thmid = thplus;
tmid = tmid + step;
thplus = (f2 * Sin[DriveFreq * t] + 2 * thmid + f3 * Sin[thmid] +
f4 * thminus)/f1; wmid = (thplus - thminus)/(2 * step);
pdispl = Append[pdispl, thmid, wmid] ;
tdispl = Append[tdispl, tmid, thmid] ,
t, tmin, tmax, step
];
Chaos – p. 16/34

Chaos Lab 1 Results
0 10 20 30 40 50 60
-100
-80
-60
-40
-20
0
tim eHsL
ΘHr
adL
Tim e Series of the Physical Pendulum
Red - Θ0=25o
Blue - Θ0=24o
0 10 20 30 40 50 60
-150
-100
-50
0
tim eHsL
ΘHr
adL
Tim e Series of the Physical Pendulum
-100 -80 -60 -40 -20 0
-10
-5
0
5
10
ΘHrad L
ΩHr
adsL
Phase Space of the Physical Pendulum
Chaos – p. 17/34

Visualizing Chaos - The Phase Space Trajectory
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 18/34

Visualizing Chaos - Stroboscopic Pictures
Chaos – p. 19/34

Visualizing Chaos - Stroboscopic Pictures
3D Scatter Plot
0
20
40
60
t HsL
-100
10ΘHrad L
-2
-1
0
1
2
ΩHrad sL
Chaos – p. 20/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 21/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 22/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 23/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 24/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 25/34

Visualizing Chaos - The Poincare Section
-3 -2 -1 0 1 2 3
-2
-1
0
1
2
ΘHradL
ΩHr
adsL
θ0 = 10
Chaos – p. 26/34

Visualizing Chaos - The Time Series
0 10 000 20 000 30 000 40 000-400
-300
-200
-100
0
timeHsL
ΘHr
adL
Time Series of the Physical Pendulum
Chaos – p. 27/34

Calculating Chaos - The Poincare Series - 1
( * initial conditions and parameters * )
t0 = 0.0; x0 = 1.0; v0 = 0.2; step = 0.01;
( * get the second and third points on the curve * )
t1 = t0 + step;
x1 = x0 + step * v0;
x2 = 2 * x1 - x0 - (step * step * x1);
v1 = (x2 - x0)/(2 * step);
( * put the first point in the table * )
MyTable = x0, v0, x1, v1;
( * rename stuff for the first point of the algorithm * )
xminus = x0;
xmid = x1;
xplus = x2;
tmin = t1 + step;
tmax = 50.0;
Chaos – p. 28/34

Calculating Chaos - The Poincare Series - 2
( * Use a Do loop and store the points when t = n\[Pi]. A centered
formula is used to approximate the second derivative. Set pa rameters
needed to test when to store the data. * )
TimeTest = Pi;
PeriodCounter = 1;
( * main loop. * )
Do[xminus = xmid;
xmid = xplus;
xplus = 2 * xmid - xminus - (step * step * xmid);
vmid = (xplus - xminus)/(2 * step);
If[t > TimeTest,
MyTable = Append[MyTable, xmid, vmid];
PeriodCounter = PeriodCounter + 1;
TimeTest = PeriodCounter * 2* Pi
],
t, tmin, tmax, step
]
Chaos – p. 29/34

Harmonic Oscillator With Coupled Equations - 1
( * Solving the mass on a spring problem.
Initial conditions and parameters * )
x0 = 0.0; ( * initial position in meters * )
v0 = 2.0; ( * initial velocity in m/s * )
t0 = 0.0; ( * initial time in seconds * )
( * set up the first two points.
step size * )
step = 0.1;
t1 = t0 + step;
x1 = x0 + v0 * step;
v1 = v0 - ( step * kspring * x0/mass);
xminus = x0; ( * initial value of x * )
vminus = v0; ( * initial value of v * )
xmid = x1;
vmid = v1;
mass = 0.33; ( * the mass in kg * )
kspring = 0.5; ( * spring constant in N/m * )
Chaos – p. 30/34

Harmonic Oscillator With Coupled Equations - 2
( * limits of the iterations. since we already have y(t=0) and we
have calculated y(t=step), then the first value in the table
will be for t=2 * step. * )
tmin = 2 * step;
tmax = 25.0;
( * create a table of ordered (t,x). for each component the next v alue is
calculated and then variables are incremented for the next i nteration.
tpos = Table[
t,
vplus = vminus - (2 * step * kspring/mass) * xmid;
xplus = xminus + (2 * step * vmid);
vminus = vmid;
vmid = vplus;
xminus = xmid;
xmid = xplus
,
t, tmin, tmax, step
];
Chaos – p. 31/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=1000. s
3 2 1 0 1 2 30
5
0
5
0
5
0
5
H dL3 2 1 0 1 2 3
0
5
0
5
0
5
0
5
H dL
1 0 1 2 3 40
5
0
5
0
5
0
H dL1 0 1 2 3 4
0
5
0
5
0
5
0
H dL
Chaos – p. 32/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
3 2 1 0 1 2 30
5
0
5
0
5
0
5
H dL
1 0 1 2 3 40
5
0
5
0
5
0
H dL1 0 1 2 3 4
0
5
0
5
0
5
0
H dL
Chaos – p. 32/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=15000. s
1 0 1 2 3 40
5
0
5
0
5
0
H dL1 0 1 2 3 4
0
5
0
5
0
5
0
H dL
Chaos – p. 32/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=15000. s
-0.01 0.00 0.01 0.02 0.03 0.041.280
1.285
1.290
1.295
1.300
1.305
1.310
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
1 0 1 2 3 40
5
0
5
0
5
0
H dL
Chaos – p. 32/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=15000. s
-0.01 0.00 0.01 0.02 0.03 0.041.280
1.285
1.290
1.295
1.300
1.305
1.310
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0., tm ax=10000. s
-0.01 0.00 0.01 0.02 0.03 0.041.280
1.285
1.290
1.295
1.300
1.305
1.310
ΘHradL
ΩHr
adsL
Θ0 = 55 deg, Shift=0., tm ax=10000. s
Chaos – p. 32/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
5 0 5 0 50
5
0
5
0
H dL
0 2 4 6 8 00
1
2
3
4
5
H dL0 0 0 0 0 0
0
0
0
0
HsL
Chaos – p. 33/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0.95 1.00 1.05 1.10 1.15-0.10
-0.05
0.00
0.05
0.10
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0 2 4 6 8 00
1
2
3
4
5
H dL0 0 0 0 0 0
0
0
0
0
HsL
Chaos – p. 33/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0.95 1.00 1.05 1.10 1.15-0.10
-0.05
0.00
0.05
0.10
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
1.060 1.062 1.064 1.066 1.068 1.0700.000
0.001
0.002
0.003
0.004
0.005
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0 0 0 0 0 0
0
0
0
0
HsL
Chaos – p. 33/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0.95 1.00 1.05 1.10 1.15-0.10
-0.05
0.00
0.05
0.10
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
1.060 1.062 1.064 1.066 1.068 1.0700.000
0.001
0.002
0.003
0.004
0.005
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
0 2000 4000 6000 8000 10 000
-1500
-1000
-500
0
tim eHsL
ΘHr
adL
Θ0 = 25 deg, Shift=0.25, tm ax=10000. s
Chaos – p. 33/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=1000. s
3 2 1 0 1 2 30
5
0
5
0
5
0
5
H dL3 2 1 0 1 2 3
0
5
0
5
0
5
0
5
H dL
4 6 8 0 2 44
5
6
7
8
9
0
H dL4 6 8 0 2 4
4
5
6
7
8
9
0
H dL
Chaos – p. 34/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
3 2 1 0 1 2 30
5
0
5
0
5
0
5
H dL
4 6 8 0 2 44
5
6
7
8
9
0
H dL4 6 8 0 2 4
4
5
6
7
8
9
0
H dL
Chaos – p. 34/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=15000. s
4 6 8 0 2 44
5
6
7
8
9
0
H dL4 6 8 0 2 4
4
5
6
7
8
9
0
H dL
Chaos – p. 34/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=15000. s
0.44 0.46 0.48 0.50 0.52 0.541.04
1.05
1.06
1.07
1.08
1.09
1.10
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
4 6 8 0 2 44
5
6
7
8
9
0
H dL
Chaos – p. 34/34

Chaos Lab 2 Results
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=1000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=15000. s
0.44 0.46 0.48 0.50 0.52 0.541.04
1.05
1.06
1.07
1.08
1.09
1.10
ΘHradL
ΩHr
adsL
Θ0 = 25 deg, Shift=0.05, tm ax=10000. s
0.44 0.46 0.48 0.50 0.52 0.541.04
1.05
1.06
1.07
1.08
1.09
1.10
ΘHradL
ΩHr
adsL
Θ0 = 55 deg, Shift=0.05, tm ax=10000. s
Chaos – p. 34/34