The Micro-geometric Model of the Toothflanks of a Cylindrical Gear With Archimedean Spiral Shaped...
8
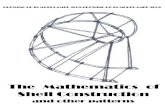
M. Máté 1 6 th International Scientific and Expert Conference TEAM 2014 Technique, Education, Agriculture & Management Kecskemét, November 10-11, 2014 THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL GEAR WITH ARCHIMEDEAN SPIRAL SHAPED TOOTHLINE M. Máté 1,2 1 Department of Mechanical Engineering, Faculty of Technical and Human Sciences Tirgu-Mures, Sapientia University of Cluj-Napoca, Romania 2 Faculty of Agriculture and Engineering, College of Nyíregyháza, Hungary * Corresponding author e-mail: [email protected] Abstract The present paper discusses a peculiar aspect of the real meshing phenomenon that appears by cutting of a special type of cylindrical gear having curved teeth. Here the flank line is derived from an Archimedean spiral. Using this tooth line-shape the load capacity of the gear pair will be significantly increased while the torque transmission is realized contacting a concave and a convex surface. The phenomenon of the meshing involves a special generating rack that simultaneously executes a pulsing motion and a slow tangential feed. The real meshing phenomenon is realized by the partial surfaces that appear as trails of the cutting edges during relative motion of the edge reported to the cut gear. The paper shows the mathematical model and the density, the displacement and the shape variation of these surfaces during the cutting cycle. Keywords: Gear, meshing, generating surface, geometry, curved tooth 1. Introduction Cylindrical gear transmission is the most frequently used in the machine industry (about 95%). Despite of their very wide application range two types were widespread applied: the right teethed and the helical teethed cylindrical gear pair. The load capacity and the performance of the transmission can be set at desired parameters by optimizing the profile correction and addendum modification values as well as by localizing the contact patch. However, external gears contacts on convex tooth flanks. It is proved that load capacity can be improved if the torque is transmitted between a concave and a convex surface. One solution is given by the Wildhaber-Novikov gear pair, where a concave and a convex tooth surface contacts when torque is transmitted. This type of gear has proved its advantage regarding the load capacity but presents also disadvantages because its sensibility to the axis distance variation. However, this type of gear were widely studied and optimized [1, 2] but its production costs still remain high. External cylindrical gear pair with curved teeth denotes a solution where concave and convex tooth surfaces contact in order to increase the load capacity, but the manufacturing costs including the costs of the tooling and the technological system setting remain at classical gear manufacturing costs level. The principle of generating is deduced from Olivier’s first principle [3]. The coupling toothflanks are theoretically generated by the same generating surface. The principle of generating is shown on figure 1. O s ws w 1 ws O s R s O 1 O 2 w 1 w 2 R s m x 1 m x 2 mq P 1 B C H A a 0 L L L-L s Figure 1. The principle of generating The theoretical generating surfaces are the carrying surfaces of the cutting edges. Each
-
Upload
peter-mate -
Category
Documents
-
view
219 -
download
1
Transcript of The Micro-geometric Model of the Toothflanks of a Cylindrical Gear With Archimedean Spiral Shaped...
-
M. Mt 1
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL GEAR WITH
ARCHIMEDEAN SPIRAL SHAPED TOOTHLINE M. Mt1,2
1Department of Mechanical Engineering, Faculty of Technical and Human Sciences Tirgu-Mures, Sapientia University of Cluj-Napoca, Romania
2Faculty of Agriculture and Engineering, College of Nyregyhza, Hungary * Corresponding author e-mail: [email protected]
Abstract The present paper discusses a peculiar aspect of the real meshing phenomenon that appears by cutting of a special type of cylindrical gear having curved teeth. Here the flank line is derived from an Archimedean spiral. Using this tooth line-shape the load capacity of the gear pair will be significantly increased while the torque transmission is realized contacting a concave and a convex surface. The phenomenon of the meshing involves a special generating rack that simultaneously executes a pulsing motion and a slow tangential feed. The real meshing phenomenon is realized by the partial surfaces that appear as trails of the cutting edges during relative motion of the edge reported to the cut gear. The paper shows the mathematical model and the density, the displacement and the shape variation of these surfaces during the cutting cycle.
Keywords: Gear, meshing, generating surface, geometry, curved tooth
1. Introduction Cylindrical gear transmission is the most frequently used in the machine industry (about 95%). Despite of their very wide application range two types were widespread applied: the right teethed and the helical teethed cylindrical gear pair. The load capacity and the performance of the transmission can be set at desired parameters by optimizing the profile correction and addendum modification values as well as by localizing the contact patch. However, external gears contacts on convex tooth flanks. It is proved that load capacity can be improved if the torque is transmitted between a concave and a convex surface. One solution is given by the Wildhaber-Novikov gear pair, where a concave and a convex tooth surface contacts when torque is transmitted. This type of gear has proved its advantage regarding the load capacity but presents also disadvantages because its sensibility to the axis distance variation. However, this type of gear were widely studied and optimized [1, 2] but its production costs still remain high.
External cylindrical gear pair with curved teeth denotes a solution where concave and convex tooth surfaces contact in order to increase the load capacity, but the manufacturing costs including the costs of the tooling and the technological system setting remain at classical gear manufacturing costs level. The principle of generating is deduced from Oliviers first principle [3]. The coupling toothflanks are theoretically generated by the same generating surface. The principle of generating is shown on figure 1.
Os
ws
w1
ws
Os
Rs
O1
O2
w1
w2
Rs
m x
1m
x2
mq
P1B
C
H
A
a0
L L
L-L
s
Figure 1. The principle of generating
The theoretical generating surfaces are the carrying surfaces of the cutting edges. Each
-
2 THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL ...
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
cutters profile is identical with the profile of the involute gear generating rack. The profiles are disposed in radial planes and guided on an Archimedean spiral. In the lower image of figure 1 the sketch of the milling head is presented. It presents 3 groups of 5 cutters for each. The cutters are disposed on identical Archimedean spirals. When the milling head rotates, a moving rack appears that cuts the teeth of the workpiece whose axis of rotation passes through O1. Details regarding the mathematics of the surface meshing process are given in [4, 5]. Focusing on figure 1 it
is to observe that the milling head realizes 30 Z
Archimedean generating surface-systems each one materializing a tooth of a rack with curved teeth. Each one group of cutters operate in different tooth spaces realizing the convex (left sided) and the concave (right sided) toothflank. For one rotation of the milling head the manufactured
gear rotates with an angle comprising 0Z angular
pitches. This relative motion involves a coupling between a theoretical rack segment and the cut gear. The superposition of the tangential feed on the main cutting motion leads to the model of the pulsing rack. Pulsing motion is a high velocity speed of the rack till it cuts in the space. When the analyzed space turns again in the working position the pulsing rack is moved in another position, finally the whole space will be generated.
2. The geometric model. Theoretical enveloping of the toothflanks can be computed using a generalization of the classical models and methods [1, 6]. In the reality, the meshed toothflank is the union of the surfaces described by the cutting edges during the relative motion. In the practice of gear generating there exist realistic studies that emphasize the real aspect of the cut surface [7]. However a mathematical model that predicts the possible arrangement of the surface patches is necessary. Here the shape of the surface is determined by the position of the cutting edge in the group and by the position of the milling head meaning the axis distance between this and the axis of the machined gear. The simplified model of the relative position uses only the specific coordinate-frames attached to the elements of the technological gear (Figure 2). The following frames are used:
The 000 YYX fixed frame;
The sss zyx milling head attached frame;
The 111 zyx machined gears frame.
The reference position of the frames in indicated
with superior zero indices: 1;,000 sizyx iii . The
iizx planes are included in the median section of the cut gear whose width is denoted with B . P is
the pole of the virtual gear pair consisting of the theoretical rack and the machined gear.
mx
Aw
O1rd
x1(0)
y1(0)
z1(0)
P
Oxs(0)
ys(0)
zs(0)
X0
Y0
Z0
Rs
D
Figure 2. The used coordinate frames
One group of cutter contains a number of 5sz
cutters. The central one is considered the referential cutter. Its symmetry point (middlepoint of the toothwidth segment on the racks pitch line)
is positioned at a distance sR from the milling
heads axis. It is denoted through index 0I . As a logical consequence the set of the indices is
2;1;0;1;2 I . The first insert with index value 2I has the shortest radius, and the last the
longest. The pitch of the Archimedean spiral is due
to the gearing dependences 0Z times the standard
rack pitch. The parameter of the spiral line becomes
2/2/ 00 mZmZpsp (1)
Considering that 0/2 Zs is the theoretical
central angle occupied by the cutter group and the
axis sx is set on the reference cutter, the minimal
and the maximal radius become:
22
maxmin
mRpR ssp
ss
(2)
The angular pitch between two consequent cutters of the group is:
1N
s (3)
Using the index value the angular distance of an arbitrary cutter to the first cutter of the group is:
II D 2 (4)
-
M. Mt 3
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
Using (2) and (4) the reference radius of all cutters can be written as
Is
I mZR D2
00 (5)
The analysis of the micro-geometry requires a precise relative positioning of the generating surfaces swept by the edges. Generating surfaces are considered only within the limit planes of the cut gear. Starting position of the frames is always considered that position of the cut gear and the milling head where the reference point A of the first cutter (index -2) reaches the gear limit plane of
equation 2/BYs as shown in figure 3. This is
valid for any distance of the milling head's axis that indicates the position of the rack during the cutting process (figure 1).
O
xs
ys X0
Y0
A
j k
B
B/2
B/2
A
j b
A1
m/2
Os
j b
Figure 3. The angular distance and the
coverage angle of an arbitrary edge
Coverage angle is the value of the angular motion of the milling head till the analyzed cutters edge passes through the width of the machined gear.
For example, first edges coverage angle is bj2 .
Reference point A of the arbitrary edge reaches the limit plane in A1. The coverage angle value is
bj2 . The beginning of the arbitrary edge swept
surface happens after a rotation of the milling head
of value where
0minmin 2arcsin
2arcsin
mZ
BB
(6)
While the milling head rotates it also execute the tangential feed. Here an analogy with the gear shaping technology is needed. It can be accepted that the length of the milling heads shift while the gear executes one complete rotation is equal to the circular feed s. The feed ratio will here be defined as the length of the shift that corresponds to a rotation of 1 radian:
1
0*
2 z
Zss
(7)
The gearing ratio is computed considering a perfect rolling between the centroids of the rack and the gear. Equalizing the tangential velocities it can be written that
d
sp
s
ssspsdtr
spisprv
*
11
*1
w
wwww (8)
The limit positions of the milling head during the cutting of a tooth space is approximated with the model of rack-involute gear pair as shown in figure 4.
O1
x1(0)
A B
mx
P
P1
C
DT
E
rb
rdra
Pitch line
Rolling line
z1(0)
x1
z1
x1'
z1'
Beginning of meshing End of
meshing
Figure 4. The limit positions of the meshing
Using figure 4 the 11j and 12j values can be
easily computed. The complete length of the feed shift is given by
1211 jj D dr (9)
Finally the geometrical dependence of the moving frames must be determined. Lets consider the frames shown in Figure 5.
O1
x1(0)
zs
x*s
Os
z1(0)
X0
z1'
Start of rolling
Z0
O
X0
Y0
O
y*s
O*s
xs
x1'
Rsrd j 11
O1
x1'y1
z1'
Reference position
0z*s
x*sy*s
A
j b
Start of first cut
x*1z*1
z*1 x*1
B/2
Figure 5. The relative positions of the frames when first cutter starts.
-
4 THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL ...
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
Comparing the frames shown in figure 2 with those shown in figure 5 it can be concluded that the mills frame must be rotated counterclockwise by an
angle bss j 2/ while point A of the first cutter
reaches the gears limit plane. Due to the rolling it
must be also shifted with the distance ss *
0 .
Frame of cut gear is also rotated ccw. by
ssi j 111 . If another cutter is considered than
the milling head must be rotated clockwise with a supplementary setting angle computed from (4) and (6):
0minmin 2arcsin
2arcsin
mZ
BB
i
isi
DD
(10)
Supplementary rotation is needed to correct the
gears position too, reaching sisi i 11 . These
are the start angular values when the cutters work at the beginning of the rolling segment. After n revolutions of the cut gear the mills axis is shifted
right with a distance *2 sns . In order to avoid
the senseless complication of the model lets
consider s a continuous variable. For this
position of the mills axis the cut gear must be
rotated clockwise with ds r/ . Based on the
statements above the angular positions of the frames for an arbitrary cutter and an arbitrary rolling position can be computed as follows:
dssiis
sibss
rixx
xx
/,
2/,
11110
11
0
j
j
j
(11)
For an arbitrary position of the cutting edge during the sweeping of the generating surface,
considering principal parameter the rotation sj of
the milling head the expressions (11) become the general form
ssdssiis
ssibsss
irixx
xx
jj
jj
j 1111110
11
0
/,
2/,
(12)
The transformation matrix between the mills and the cut gears frame is:
1000
sincossinsincossin
00cossin
cossinsincoscoscos
010111
010111
1zx
xx
ss
ss
ss
ss
ss
s
M
(13)
where constants of the fourth column are computed as follows:
11
01
110
1
*0110
cossin
sincos
jj
ARz
ARx
srx
s
s
ssds
(14)
3. The equations of the cutting edges The equations of the cutting edges relative to the frame of the milling head are computed using figure 6. The equations are written first in the
auxiliary frame 222 zyx , followed by a rotation. The
concave and the convex sided edges can be
A10
A
A1,-2
Os
Os
ys
x2
z2
Kv
Kx
xs
x2
y2
A
spiral
Figure 6. The cutting edges in the frame of the milling head.
written using a single equation system.
0
0
uuz
pRuauy
pRuaux
T sps
spss
KxKv
2
2, sintg;
costg;
: a
a
(15)
The concave flanks parametric equations will be
obtained for 1 , as appropriate the convex flank results for 1 .
4. The equations of the swept surfaces Using the elements of the model presented above, the surfaces swept by the edges can considered as the simple infinity of edges in the frame of the
cut gear determined by the values of parameter sj
. The equations are written using matrix (13) and equations (15) within the matrix transformation
ss rMr 11 (16)
5. Computer simulation results The simulation was realized in MathCad 15 environment, for the following initial values:
module 5m mm;
-
M. Mt 5
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
rack profile angle 200a ;
teeth number 411 z ;
profile correction 15.0x ;
gear width 40B mm;
spiral reference radius 80sR mm;
number of cutter groups 30 Z ;
number of cutters in the group 5sz ;
circular feed 3.0s mm/rev.workpiece. The length of the rolling segment is 40.702 mm on which a 9 segment equidistant division was considered. This marks 10 equidistant points including the ends of the rolling length. Each point present a possible position of the milling heads axis when the generating process begins with the first edge. The program computes the coordinates depending on the cutters index value and the milling head position. Two types of representations were done. The first type shows the succession of the surfaces generated successively by each cutter of the group. The second representation tries to answer the successive positions of the surfaces swept by the same cutter, during the linear motion of the milling head due to the tangential feed. First type of representation is shown in figures 7-12. Figures 7, 9 and 11 contain the surfaces swept by the edges from the concave side, while figures 8, 10 and 11 those that appear on the convex side.
x1
y1
z1
kv1
kv2kv3
kv4
kv5
Figure 7. The swept surfaces on the concave side at the beginning of the rolling distance.
On any of the figures 5..1, iikv denotes the
concave surface swept by the edge of the cutter i ,
where 1i marks the first cutter of the group. In
analogy 5..1, iikx is the notation for the convex
side.
x1
y1
z1
kx1
kx2
kx3
kx4
kx5
Figure 8. The swept surfaces on the convex side at the beginning of the rolling distance.
x1
y1
z1
kv1
kv2
kv3
kv4
kv5
Figure 9. The swept surfaces on the concave side at the middle of the rolling distance.
x1y1
z1
kx1
kx2kx3 kx4
kx5
Figure 10. The swept surfaces of the convex side at the middle of the rolling distance
-
6 THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL ...
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
x1
y1
z1
kv1
kv2
kv3
kv4
kv5
Figure 11. The swept surfaces of the concave side at the end of the rolling distance
x1y1
z1
kx1
kx2
kx3
kx4
kx5
Figure 12. The swept surfaces of the convex side at the end of the rolling distance
Analyzing figures 7-12 it is to conclude that the considered surfaces present a very various arrangement depending on the position of the milling heads axis during the rolling. Near the ends of the rolling segment the surfaces are distanced, but in the middle zone of the rolling segment the distance between them becomes significantly small. Generally it can be admitted that surfaces swept by two consequent edges doesnt intersect. It is not possible to write an approximant for the meshing surface using the intersection curves between the consequent swept surfaces. In some situations it exist the intersection between two consequent surfaces but this cannot be considered
x1
y1
z1
Kv(-2;0)
Kv(-2;3)
Kv(-2;6)
Kv(-2;9)
Kv(-2;12)
Kv(-2;16)
Kv(-2;18)
Figure 13. The successive surfaces swept by the concave edge of the first cutter of the
group for different rolling positions
x1
y1
z1
Kx(-2;0)
Kx(-2;3)
Kx(-2;6)
Kx(-2;9)
Kx(-2;12)
Kx(-2;16)
Kx(-2;18)
Figure 14. The successive surfaces swept by the convex edge of the first cutter of the group
for different rolling positions
as a certainty. A similar arrangement of the surfaces can be observed when analyzing the second representation. The step was set on 3 mm, corresponding to 10 complete rotations of the workpiece. The results of the computing are presented in figures 13-18. The annotations for the surfaces are similar to the precedent, but they are completed with a parenthesis, where first number signify the index of the cutter that was used in the formulas above, and the second the distance covered by the milling head due to the tangential
-
M. Mt 7
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
x1
y1
z1
Kv(0;3)
Kv(0;6)
Kv(0;9)
Kv(0;12)
Kv(0;16)
Kv(0;18)Kv(0;0)
Figure 15. The successive surfaces swept by the concave edge of the central cutter of the
group for different rolling positions
x1
y1
z1
Kx(0;0)
Kx(0;3)
Kx(0;6)
Kx(0;9)
Kx(0;12)
Kx(0;16)
Kx(0;18)
Figure 16. The successive surfaces swept by the convex edge of the central cutter of the
group for different rolling positions
feed. For example, 12,2kv signify the surface swept by the concave (here: the right sided) edge
of the first cutter in the group ( 2I ).
It is to conclude that the arrangement of the surfaces depends on the position of the cutter in the group, and differs from the concave to the convex side. Analyzing figure 13 it is to concludeThat surfaces swept by the concave edge of the first cutter in the group are quasi linear disposed considering any intersections at the exit side, when edges leave the space of the cut gear. But the convex edge of the same cutter produces more distanced surfaces. Comparing figures 15 and 16 a similarity appear regarding the arrangement, while surfaces are interlocked.
x1
y1
z1
Kv(2;3)
Kv(2;6)
Kv(2;9)
Kv(2;12)
Kv(2;16)
Kv(2;18)
Kv(2;0)
Figure 17. The successive surfaces swept by the concave edge of the last cutter of the
group for different rolling positions
x1
y1
z1
Kx(2;0)
Kx(2;3)
Kx(2;6)
Kx(2;9)
Kx(2;12)
Kx(2;16)
Kx(2;18)
Figure 18. The successive surfaces swept by the convex edge of the last cutter of the group
for different rolling positions
Finally, comparing figures 17 and 18 it can be noticed that last cutters edges produce similar arrangement as shown in figures 13 and 14. In opposition to those, here surfaces swept by the convex side are closer arranged that at the concave side.
-
8 THE MICRO-GEOMETRIC MODEL OF THE TOOTHFLANKS OF A CYLINDRICAL ...
6th International Scientific and Expert Conference TEAM 2014
Technique, Education, Agriculture & Management
Kecskemt, November 10-11, 2014
6. Conclusion Computer simulation results demonstrates that the enveloping surfaces manifold is more complex in comparison with classical situations (gear shaping with rack, with cutter, gear hobbing). Due to the two component based kinematic of the cutting tool (first the pulsing rack simulated by the cutter group and the second the tangential motion of the milling head) the virtual rack that realizes finally the meshing changes its dimensions, the form and the curvature of the generating surface. As a consequence situations of ante and posterior undercut can appear. For example, lets consider that a curve segment situated on the holder surfaces of the cutting edges (this is an Archimedean surface, [4]) fulfills the law of gearing [1, 3, 6, 7] when the milling head is located in some place of the rolling line. Due to the changing of the relative position of the edge swept surfaces during the tangential feed the meshing segment that was calculated before can be eliminated during the next cutting process. Or, it can be considered a segment of curve that fulfills the low of gearing but it was cut down in a precedent cutting phase. Despite of this inconvenience the Archimedean spiral curved teeth match the requirements of correct coupling due to the law of Willis and Oliviers first principle regarding the common generating surfaces. The correct calculus of the tooth flank form requires besides the applying of the law of gearing a numerical checking of the existence of the theoretically computed points. This can be performed through using the surfaces swept by edge as limit surfaces of the tooth space. Here a CAD-program is indispensable.
7. Acknowledgement This research was supported by the European Union and the State of Hungary, co-financed by the European Social Fund in the framework of TMOP-4.2.4.A/2-11/1-2012-0001 National Excellence Program. A kutats a TMOP-4.2.4.A/2-11/1-2012-0001 azonost szm Nemzeti Kivlsg Program Hazai hallgati, illetve kutati szemlyi tmogatst biztost rendszer kidolgozsa s mkdtetse konvergencia program cm kiemelt projekt keretben zajlott. A projekt az Eurpai Uni tmogatsval, az Eurpai Szocilis Alap trsfinanszrozsval valsul meg.
8. References
[1] F.L. Litvin, F. Pin-Hao, S.A. Lagutin Compu-terized Generation and Simulation of Meshing and Contact of New Type of Novikov-Wildhaber Helical Gears,R2000-209415'' [Online]. Available: http://gearexpert.free.fr/fichiers_pdf/engrenage_Novikov_Wildhaber_NASA_report.pdf [Accessed: 30-Jun-2012]
[2] S.M. Nacy, M.Q.Abdullah, M.N. Mohammed Generation of Crowned Parabolic Novikov gears, Adept Scientific Knowledge Base. Available: http://www.adeptscience.co.uk/kb/articleprint.php?noteid=6E9E. [Accessed: 19-Mar-2012].
[3] I.Duds, The Theory and Practice of Worm Gear Drives Penton Press, 2005, ISBN 978-1-85718-027-5.
[4] M. Mt, D. Hollanda The Cutting of Cylindrical Gears Having Archimedean Spiral Shaped Tooth Line 13th International Conference on Tools, 27-28 March 2012, Miskolc, ISBN 978-963-9988-35-4, pp. 357-362.I.
[5] M. Mt, D. Hollanda F. Tolvaly-Rosca, I. Popa-Mller The localization of the contact patch by cylindrical gear having an Archime-dean toothline using the method of setting the tangential displacement XXI-ik OGT-2013 XXI-th International Conference of Mechanical Engineers), Arad, 25-28 apr. 2013, Confe-rence Proceedings, ISSN 2068-1267, pp.265-268.
[6] I. Dudas, K. Banyai, G.Varga Simulation of meshing of worm gearing, American Society of Mechanical Engineers, Design Engineering Division (Publication) DE 88, pp. 141-146,1996.
[7] G.Varga, Z. Balajti, I. Dudas Advantages of the CCD camera measurements for profile and wear of cutting tools 2005, Journal of Physics: Conference Series 13 (1) , pp. 159-162.
Zotero Style Repository, Roy Rosenzweig Center for History and New
Media. [Online]. Available: http://www.zotero.org/styles. [Accessed: 19-Mar-2012].