Symmetry and degeneracy - Istituto Nazionale di Fisica...
52
Symmetry and degeneracy Let m= degeneracy (=number of basis functions) of irrep i: by acting with off-diagonal R and orthogonalization. From one can obtain all the m ) ( 1 irrep irrep j For instance in the triangle Group the degenerate irrep E has basis functions that can be taken to transform like (x,y), The x function is taken by rotations and reflections to a linear combination of x and y. This implies that the energy eigenvalues whose eigenfunctions belong to an irrep must be degenerate m times: Can they be even more degenerate?
Transcript of Symmetry and degeneracy - Istituto Nazionale di Fisica...
Symmetry and degeneracy
Let m= degeneracy (=number of basis functions) of irrep i:
by acting with off-diagonal R and orthogonalization.
From one can obtain all the m )(
1
irrep irrep
j
For instance in the triangle Group the degenerate irrep E has basis functions that can be taken to transform like (x,y), The x function is taken by rotations and reflections to a linear combination of x and y.
This implies that the energy eigenvalues whose eigenfunctions belong to an irrep must be degenerate m
times: Can they be even more degenerate?
2 2
Accidental degeneracy
It is possible that by accident two states unrelated by symmetry come so
close in energy to appear degenerate in low resolution experiment; however
a mathematically exact degeneracy with no symmetry reason is miraculous.
Simply, one was unaware of using a Subgroup of the actual Group, because
some symmetry had still to be discovered
3 3
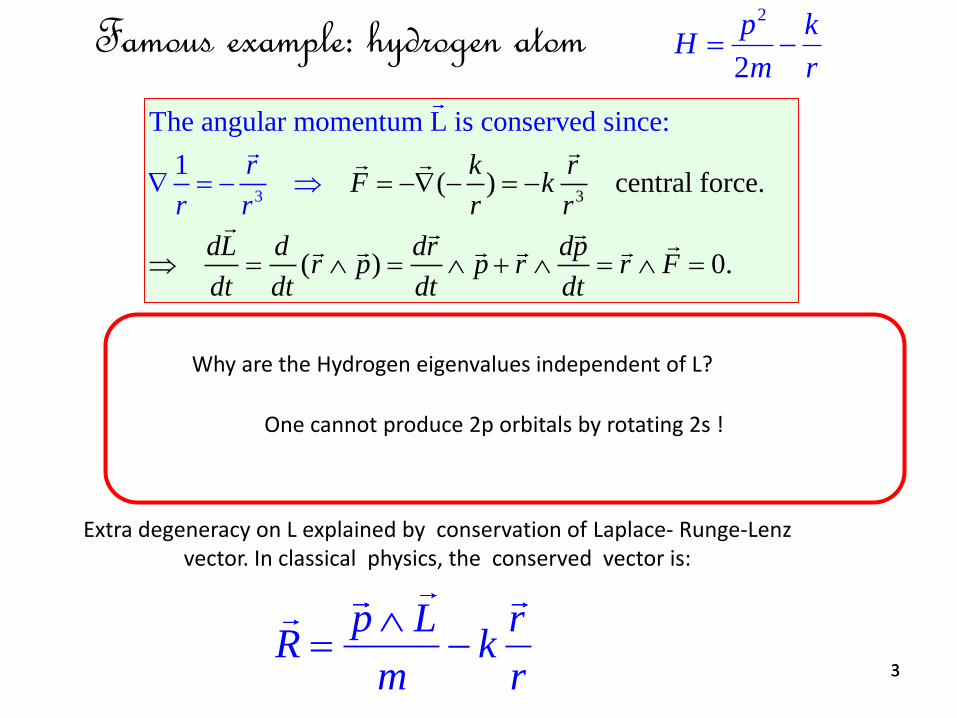
Famous example: hydrogen atom 2
2
p kH
m r
Extra degeneracy on L explained by conservation of Laplace- Runge-Lenz vector. In classical physics, the conserved vector is:
p L rR k
m r
33
The angular momentum L is conser
( ) central forc
ved since:
e
0
1.
( ) .
r k rF k
r r
dL d dr dpr p p r r F
dt dt dt
r
dt
r
Why are the Hydrogen eigenvalues independent of L?
One cannot produce 2p orbitals by rotating 2s !
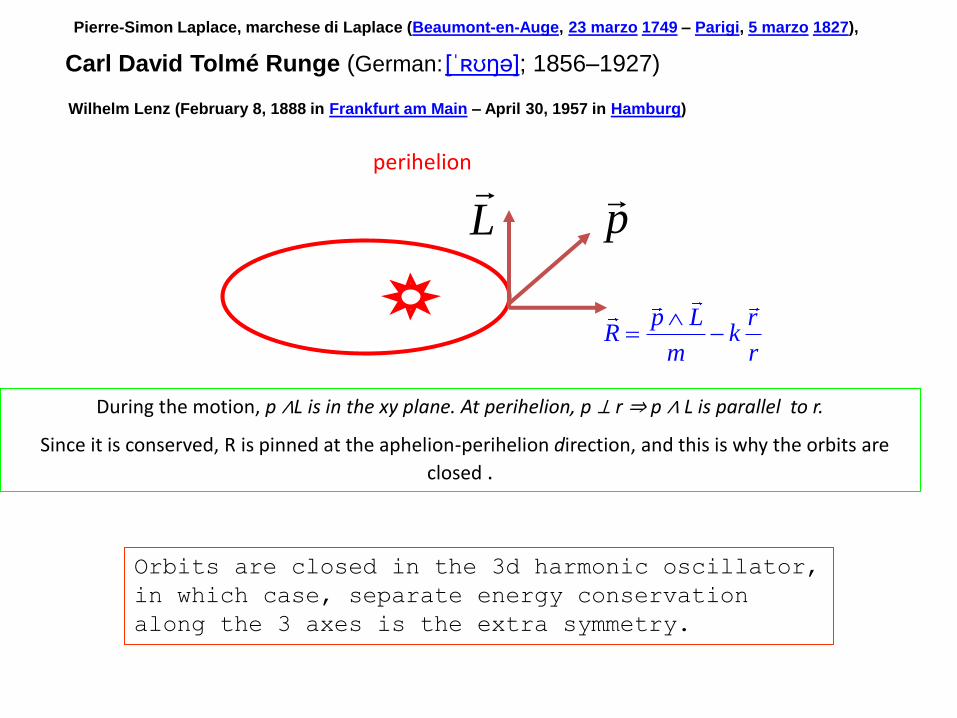
Carl David Tolmé Runge (German: [ˈʀʊŋə]; 1856–1927)
Wilhelm Lenz (February 8, 1888 in Frankfurt am Main – April 30, 1957 in Hamburg)
During the motion, p ∧L is in the xy plane. At perihelion, p ⊥ r ⇒ p ∧ L is parallel to r.
Since it is conserved, R is pinned at the aphelion-perihelion direction, and this is why the orbits are
closed .
Orbits are closed in the 3d harmonic oscillator,
in which case, separate energy conservation
along the 3 axes is the extra symmetry.
Pierre-Simon Laplace, marchese di Laplace (Beaumont-en-Auge, 23 marzo 1749 – Parigi, 5 marzo 1827),
perihelion
p L rR k
m r
pL
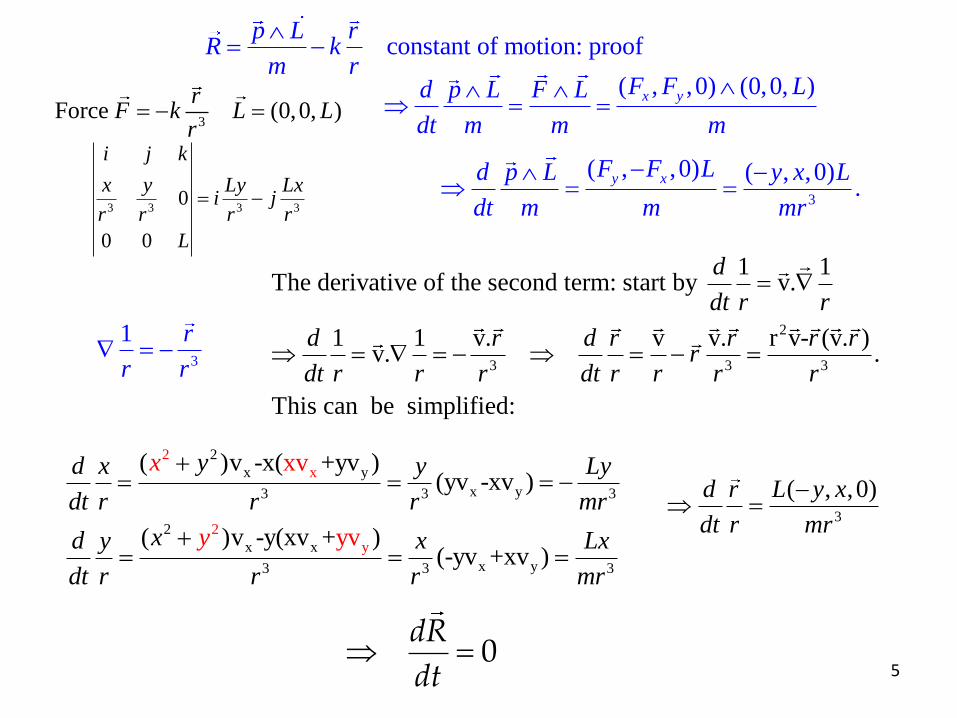
constant of motion: proofp L r
R km r
3
1
r
r r
2
3 3 3
1 1The derivative of the second term: start by v.
1 1 v. v v. r v- (v. )v. .
This can be simplified:
d
dt r r
d r d r r r rr
dt r r r dt r r r r
2
x y
x y3 3 3
2
x
2
x x
x y
2
3 3 3
y
( )v -x( +yv )(yv
xv-xv )
( )v -y(xv yv+ )(-yv +xv )
yd x y Ly
dt r r r mr
xd y x Lx
dt r r
y
r mr
x
3
( , ,0)
d r L y x
dt r mr
3Force (0,0, )
rF k L L
r
( , ,0) (0,0, )x yF F Ld p L F L
dt m m m
0dR
dt
5
3
( , ,0) ( , ,0).
y xF F Ld p L y x L
dt m m mr
3 3 3 30
0 0
i j k
x y Ly Lxi j
r r r r
L
6 6
Wolfgang Pauli in 1926 first solved the SE for the H atom using the SO(4) symmetry. SO(4) is a Lie Group (see below).
W. Pauli, “On the hydrogen spectrum from the standpoint of the new quantum mechanics,” Z. Physik 36, 336-363 (1926).
Therefore we must say more about Lie Groups. Some are already familiar from the
theory of angular momentum in Quantum Mechanics.
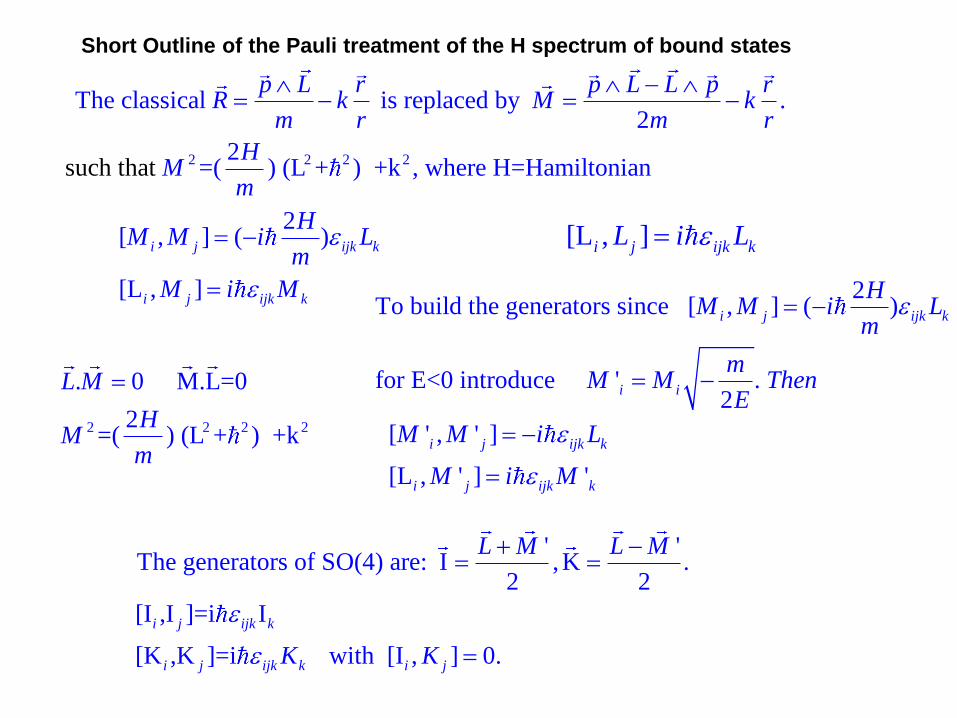
Short Outline of the Pauli treatment of the H spectrum of bound states
The classical is replaced by .2
p L r p L L p rR k M k
m r m r
2 [ , ] ( )
[L , ]
i j ijk k
i j ijk k
HM M i L
m
M i M
2 2 2 2
. 0 M.L=0
2=( ) (L + ) +k
L M
HM
m
[L , ]i j ijk kL i L
2 2 2 22=( ) (L + ) +k , where H=Hamisu ltch that onian
HM
m
2To build the generators since [ , ] ( )
for E<0 introduce ' . 2
[ ' , ' ]
[L , ' ] '
i j ijk k
i i
i j ijk k
i j ijk k
HM M i L
m
mM M Then
E
M M i L
M i M
' 'The generators of SO(4) are: I ,K .
2 2
[I ,I ]=i I
[K ,K ]=i with [I , ] 0.
i j ijk k
i j ijk k i j
L M L M
K K
8 8
1 2 3 1 2 3
_
_
_
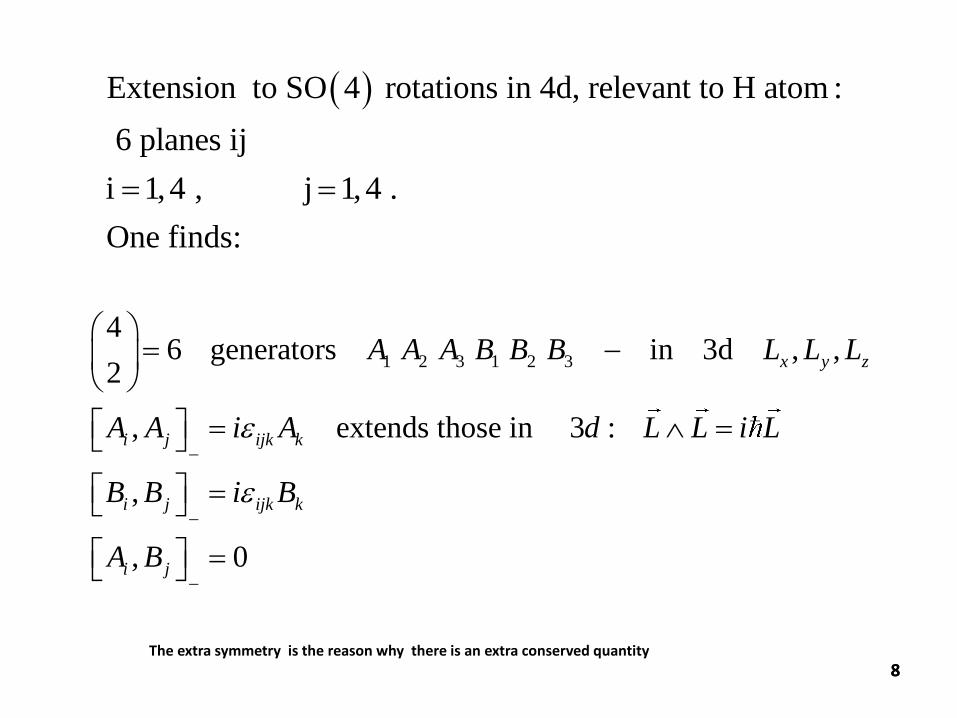
46 generators in 3d , ,
2
, extends those in 3 :
,
, 0
x y z
i j ijk k
i j ijk k
i j
A A A B B B L L L
A A i A d L L i L
B B i B
A B
Extension to SO 4 rotations in 4d, relevant to H atom :
6 planes ij
i 1,4 , j 1,4 .
One finds:
The extra symmetry is the reason why there is an extra conserved quantity
9 9
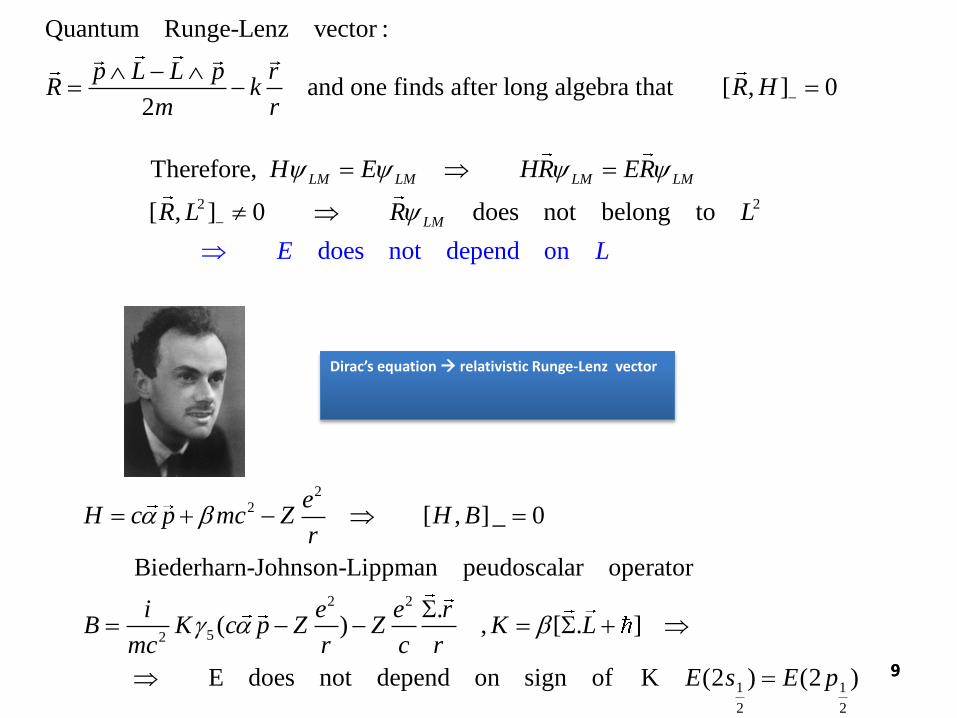
Quantum Runge-Lenz vector :
and one finds after long algebra that [ , ] 02
p L L p rR k R H
m r
2 2
do
Therefore,
[ , ] 0 does not bel
es not depend on
ong to
LM LM LM LM
LM
H E HR ER
R L R L
E L
22
2 2
52
1 1
2 2
[ , ] _ 0
Biederharn-Johnson-Lippman peudoscalar operator
.( ) , [ . ]
E does not depend on sign of K (2 ) (2 )
eH c p mc Z H B
r
i e e rB K c p Z Z K L
mc r c r
E s E p
Dirac’s equation relativistic Runge-Lenz vector
10
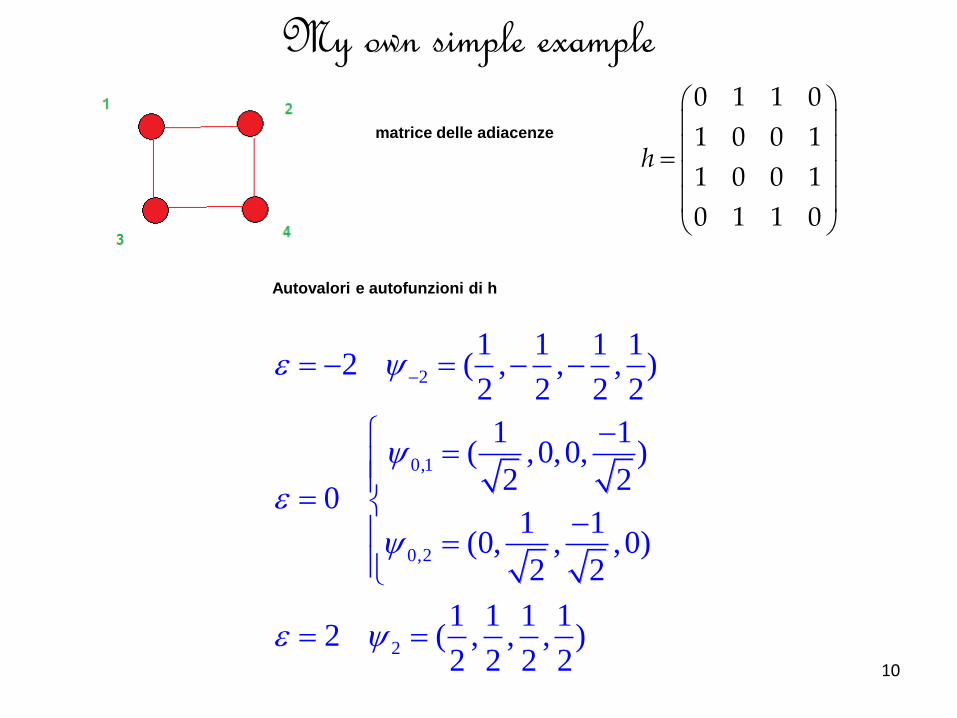
My own simple example 0 1 1 0
1 0 0 1
1 0 0 1
0 1 1 0
h
2
0,1
0,2
2
1 1 1 12 ( , , , )
2 2 2 2
1 1( ,0,0, )
2 20
1 1(0, , ,0)
2 2
1 1 1 12 ( , , , )
2 2 2 2
matrice delle adiacenze
Autovalori e autofunzioni di h
11
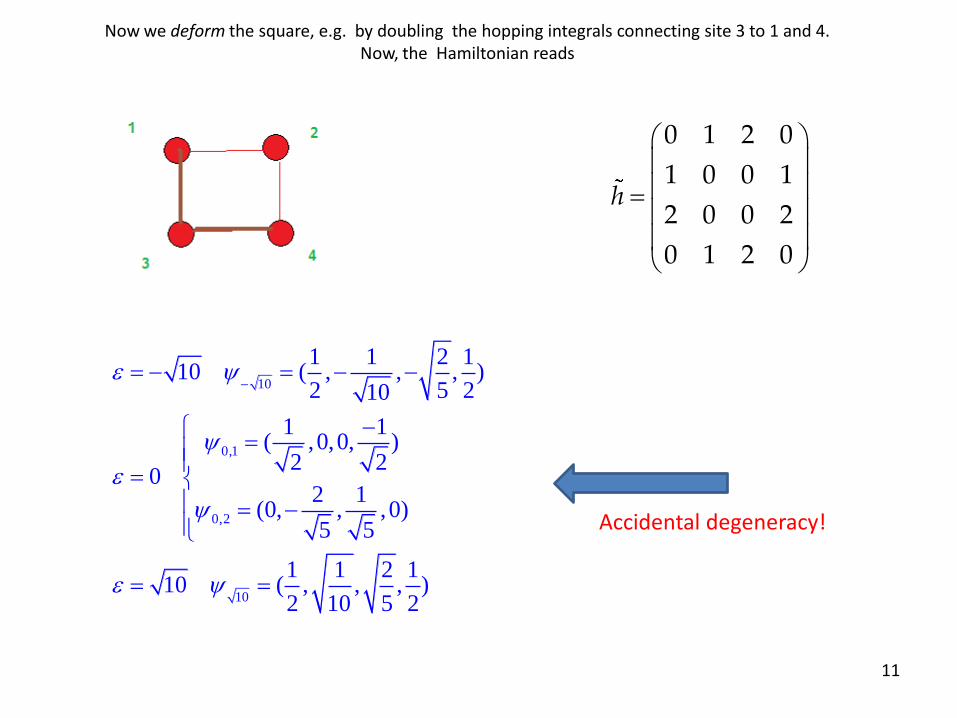
Now we deform the square, e.g. by doubling the hopping integrals connecting site 3 to 1 and 4. Now, the Hamiltonian reads
0 1 2 0
1 0 0 1
2 0 0 2
0 1 2 0
h
10
0,1
0,2
10
1 1 2 110 ( , , , )
2 5 210
1 1( ,0,0, )
2 20
2 1(0, , ,0)
5 5
1 1 2 110 ( , , , )
2 10 5 2
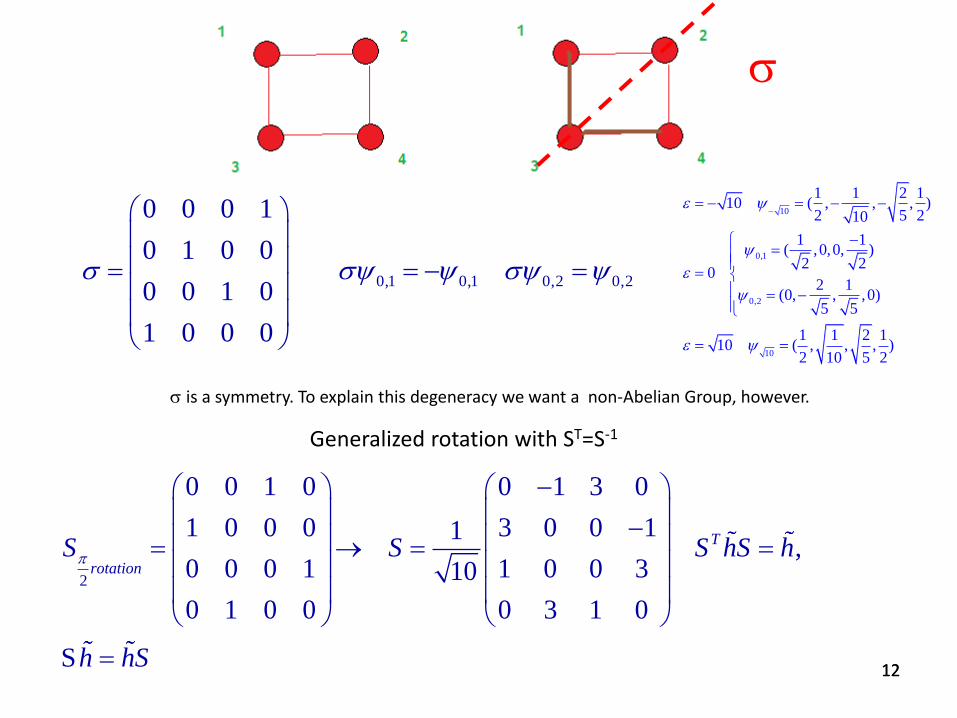
Accidental degeneracy!
12 12
2
0 0 1 0 0 1 3 0
1 0 0 0 3 0 0 11,
0 0 0 1 1 0 0 310
0 1 0 0 0 3 1 0
S
T
rotationS S S hS h
h hS
s is a symmetry. To explain this degeneracy we want a non-Abelian Group, however.
Generalized rotation with ST=S-1
s
0,1 0,1 0,2 0,2
0 0 0 1
0 1 0 0
0 0 1 0
1 0 0 0
s s s
10
0,1
0,2
10
1 1 2 110 ( , , , )
2 5 210
1 1( ,0,0, )
2 20
2 1(0, , ,0)
5 5
1 1 2 110 ( , , , )
2 10 5 2
13 13
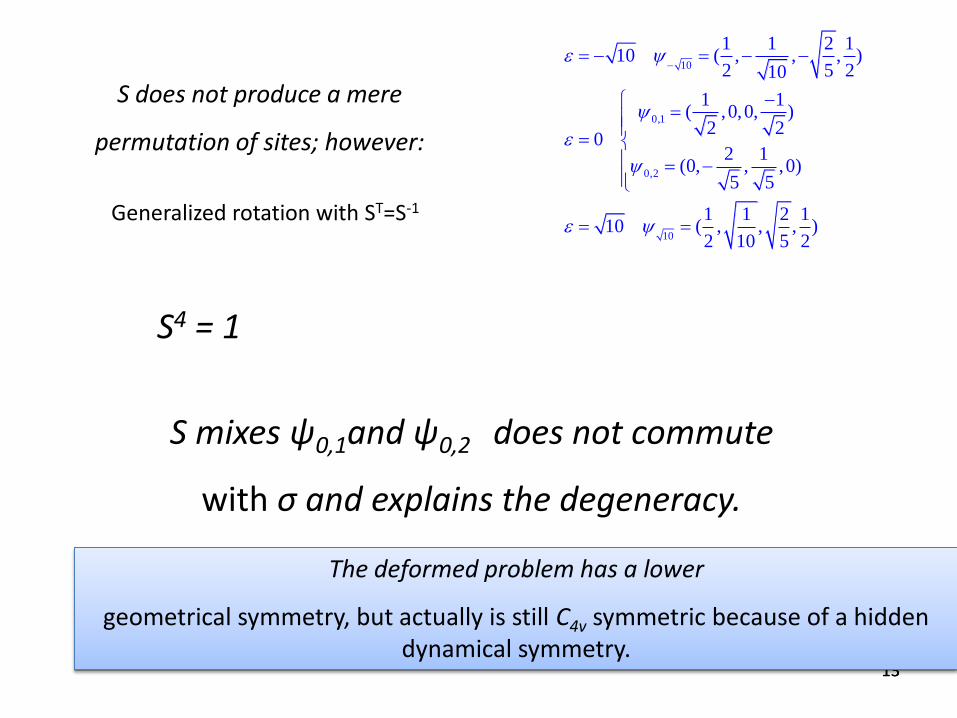
The deformed problem has a lower
geometrical symmetry, but actually is still C4v symmetric because of a hidden dynamical symmetry.
S4 = 1
S does not produce a mere
permutation of sites; however:
S mixes ψ0,1and ψ0,2 does not commute
with σ and explains the degeneracy.
Generalized rotation with ST=S-1
10
0,1
0,2
10
1 1 2 110 ( , , , )
2 5 210
1 1( ,0,0, )
2 20
2 1(0, , ,0)
5 5
1 1 2 110 ( , , , )
2 10 5 2
14 14
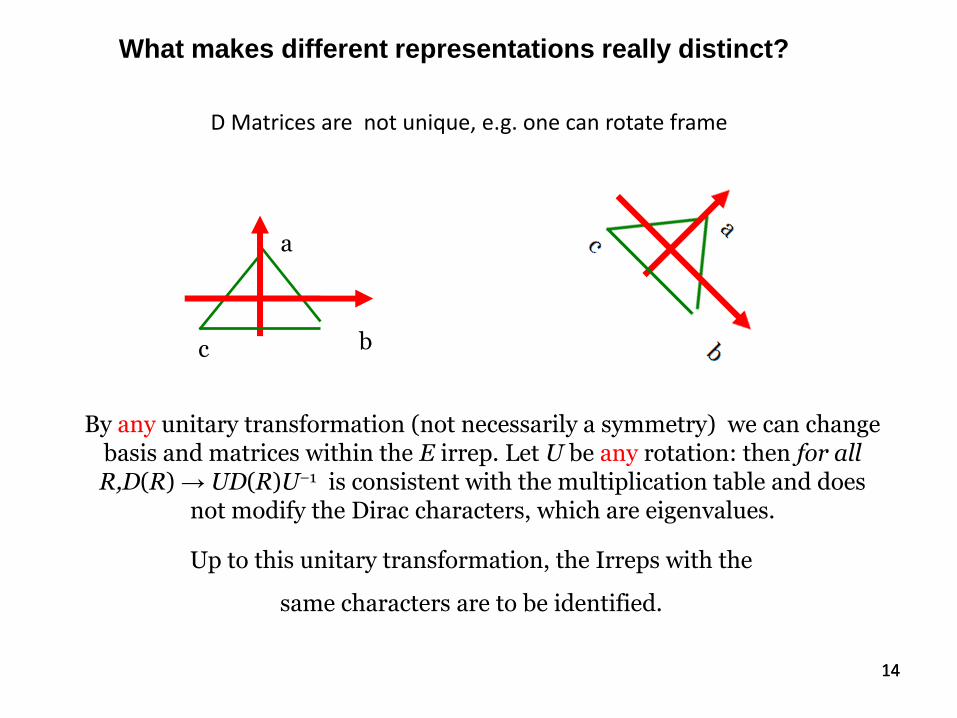
D Matrices are not unique, e.g. one can rotate frame
By any unitary transformation (not necessarily a symmetry) we can change basis and matrices within the E irrep. Let U be any rotation: then for all R,D(R) → UD(R)U−1 is consistent with the multiplication table and does
not modify the Dirac characters, which are eigenvalues.
Up to this unitary transformation, the Irreps with the
same characters are to be identified.
a
c b
What makes different representations really distinct?
15 15
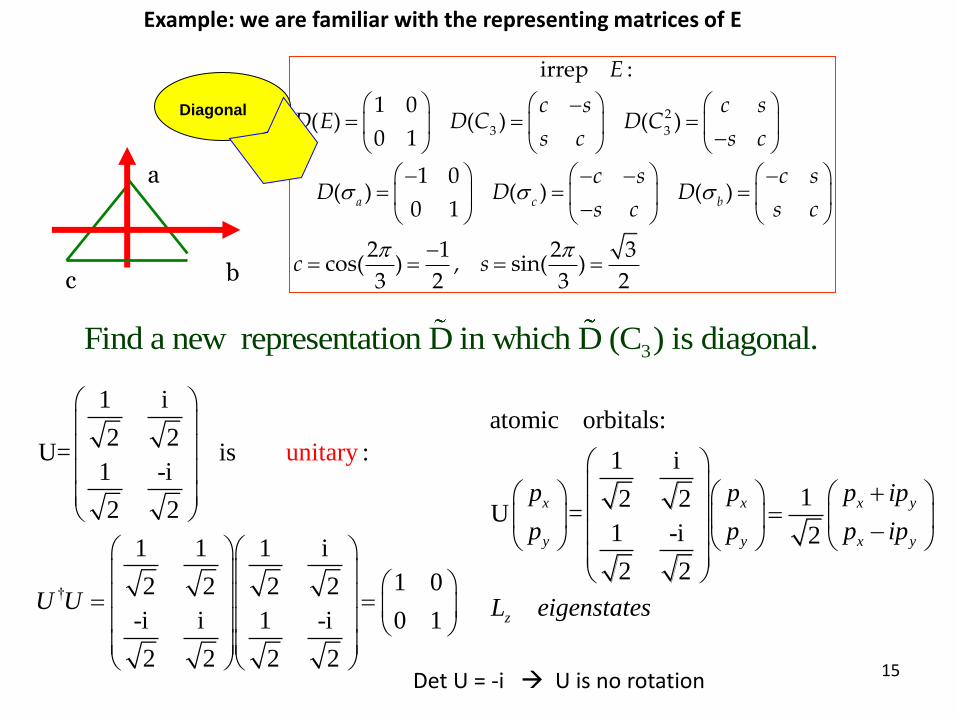
Example: we are familiar with the representing matrices of E
s s s
2
3 3
irrep :
1 0( ) ( ) ( )
0 1
1 0( ) ( ) ( )
0 1
2 1 2 3cos( ) , sin( )
3 2 3 2
a c b
E
c s c sD E D C D C
s c s c
c s c sD D D
s c s c
c s
3Find a new representation D in which D (C ) is diagonal.
†
1 i
2 2U= is :
1 -i
2 2
1 1 1 i
1 02 2 2 2
-i i 1 -i 0 1
2 2
unitar
2
y
2
U U
a
c b
Det U = -i U is no rotation
atomic orbitals:
1 i
12 2U =
1 -i 2
2 2
x x x y
y y x y
z
p p p ip
p p p ip
L eigenstates
Diagonal
16 16
2
3†
3 3 2
3
1 i 1 1
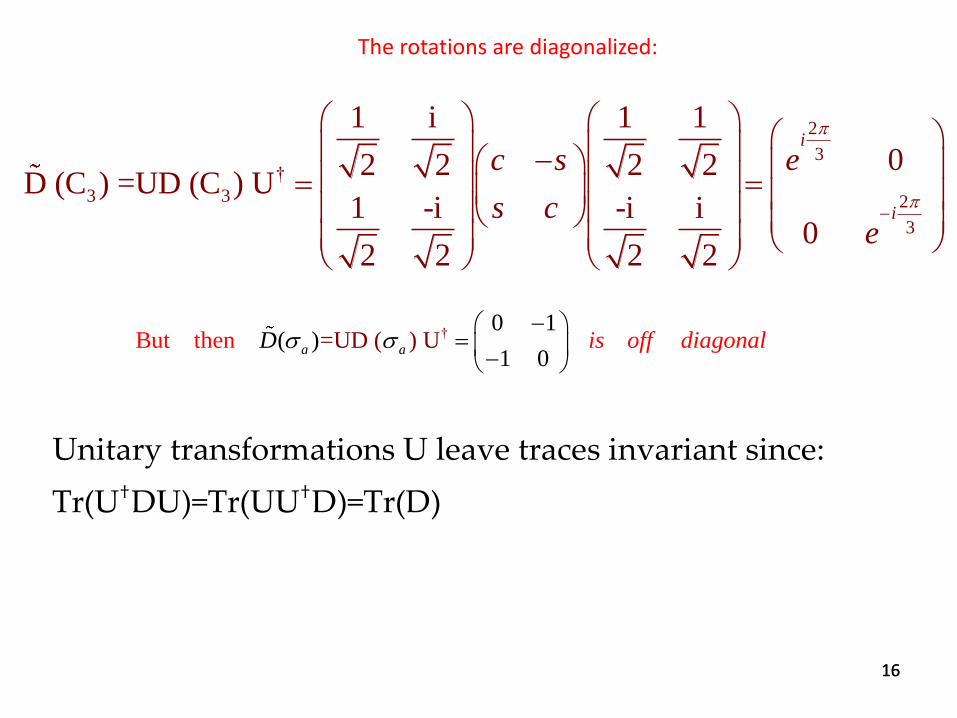
02 2 2 2D (C ) =UD (C ) U
1 -i -i i0
2 2 2 2
i
i
c s e
s ce
†0
=UD ( ) UBut then1
( )1 0
a a is off diagonaD ls s
The rotations are diagonalized:
† †
Unitary transformations U leave traces invariant since:
Tr(U DU)=Tr(UU D)=Tr(D)
17 17
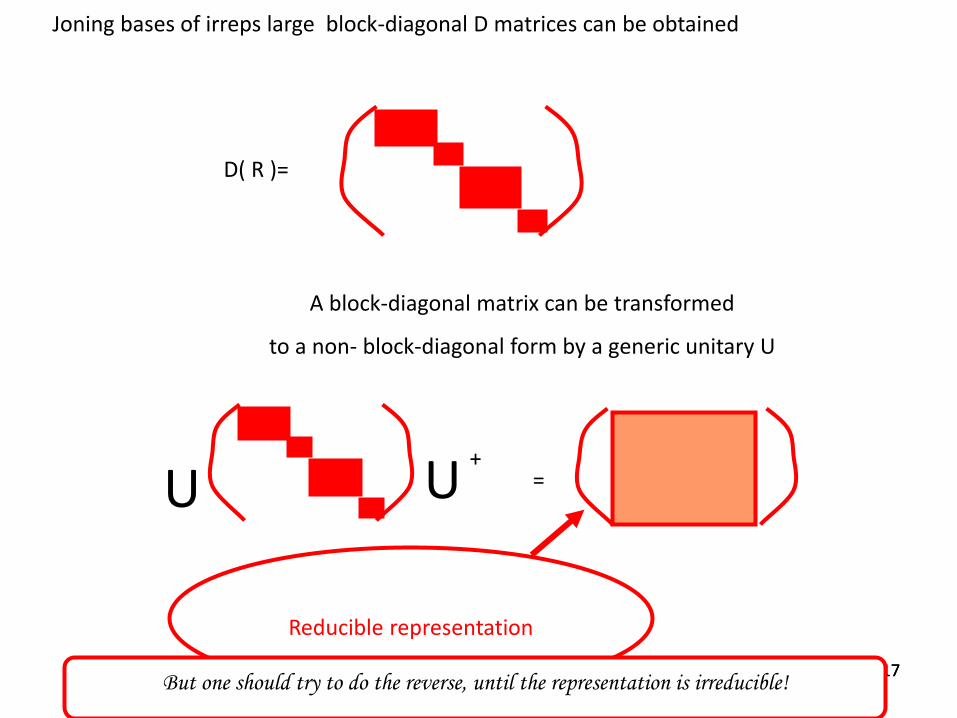
Joning bases of irreps large block-diagonal D matrices can be obtained
D( R )=
A block-diagonal matrix can be transformed
to a non- block-diagonal form by a generic unitary U
U +
U =
Reducible representation
But one should try to do the reverse, until the representation is irreducible!
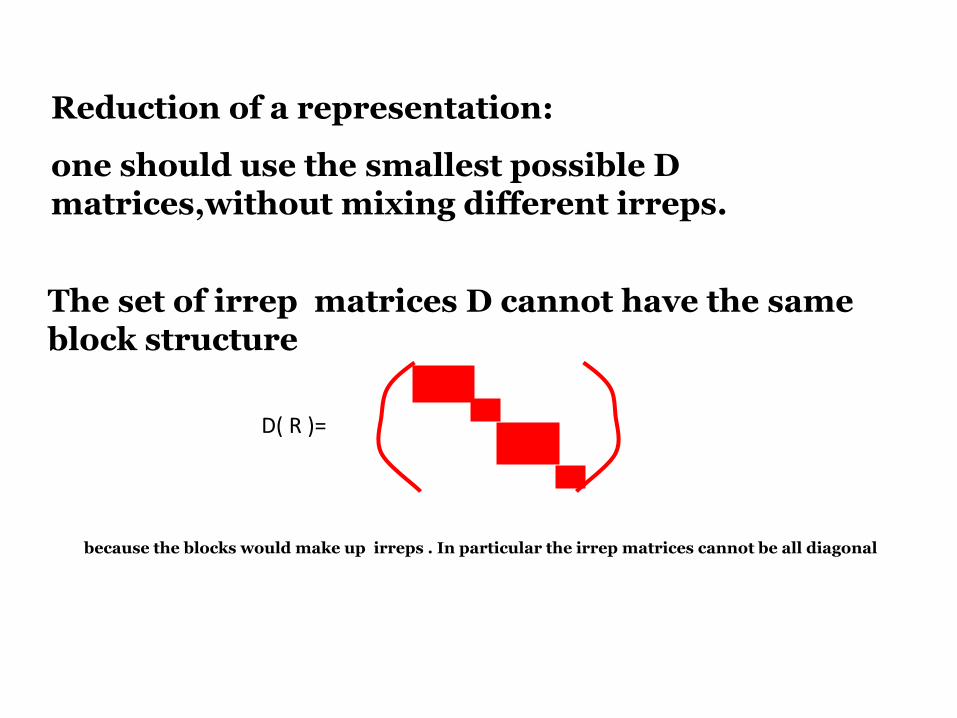
Reduction of a representation:
one should use the smallest possible D matrices,without mixing different irreps.
The set of irrep matrices D cannot have the same block structure
D( R )=
because the blocks would make up irreps . In particular the irrep matrices cannot be all diagonal
19 19
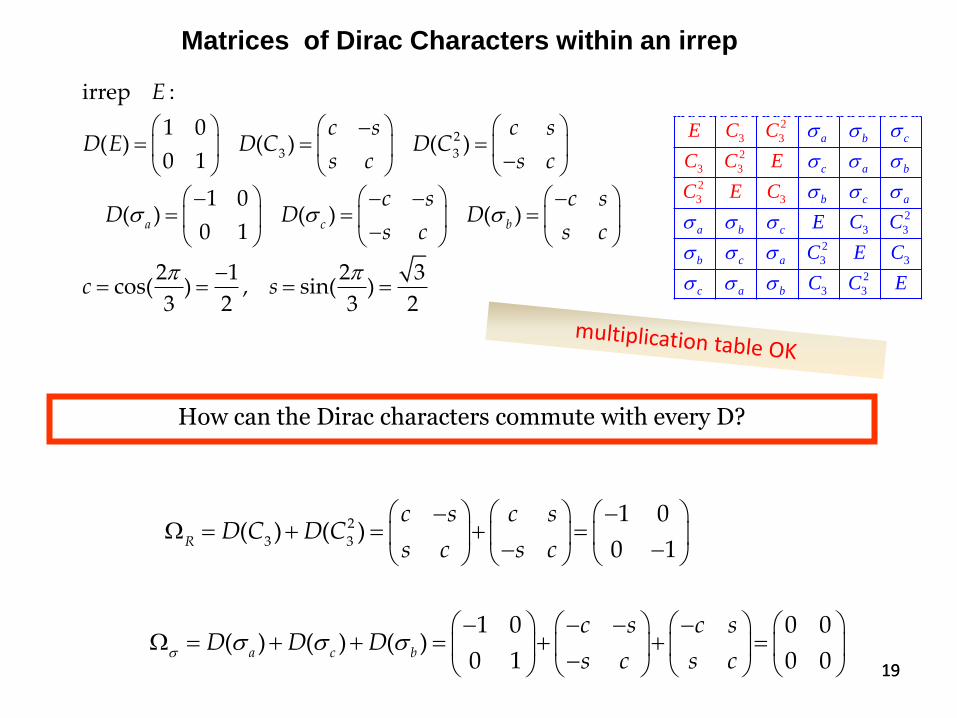
s s s
2
3 3
irrep :
1 0( ) ( ) ( )
0 1
1 0( ) ( ) ( )
0 1
2 1 2 3cos( ) , sin( )
3 2 3 2
a c b
E
c s c sD E D C D C
s c s c
c s c sD D D
s c s c
c s
How can the Dirac characters commute with every D?
2
3 3
1 0( ) ( )
0 1R
c s c sD C D C
s c s c
ss s s
1 0 0 0( ) ( ) ( )
0 1 0 0a c b
c s c sD D D
s c s c
2
2
3 3
2
3 3
2
3
3 3
2
3 3
2
3 3
3
a b c
c a b
b c a
a b c
b c a
c a b
E C C
C C E
E C C
C E C
C
C
C
C
E
E
s s s
s s s
s s s
s s s
s s s
s s s
Matrices of Dirac Characters within an irrep
20 20
1 0 0 0
0 1 0 0R s
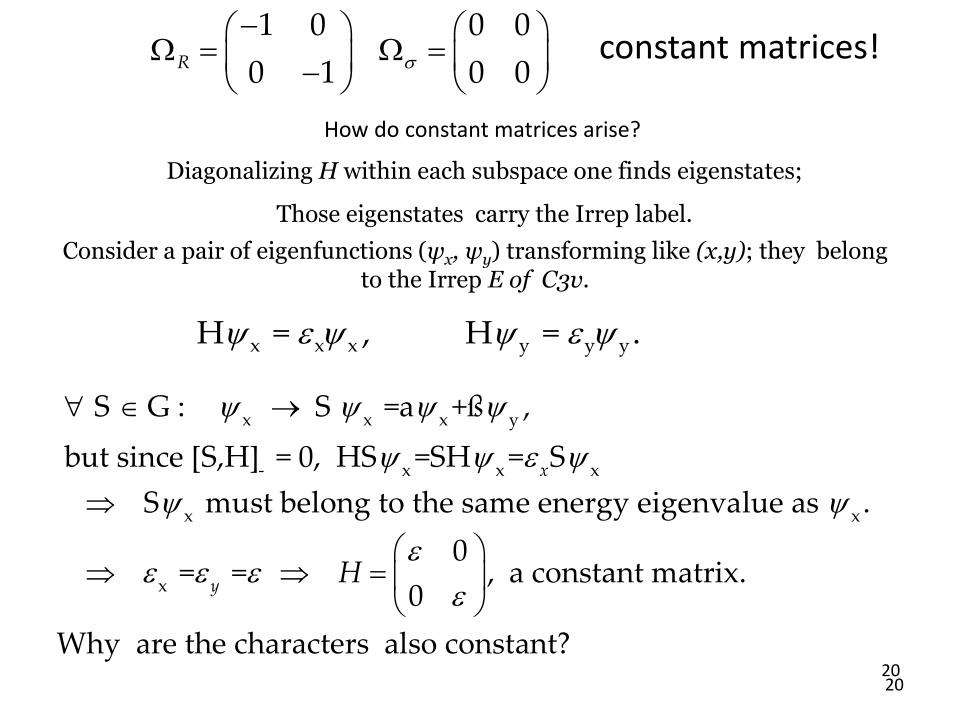
How do constant matrices arise?
Diagonalizing H within each subspace one finds eigenstates;
Those eigenstates carry the Irrep label.
Consider a pair of eigenfunctions (ψx, ψy) transforming like (x,y); they belong to the Irrep E of C3v.
x x x y y yH = , H = .
x x x y
- x x x
x x
x
S G : S =a +ß ,
but since [S,H] = 0, HS =SH = S
S must belong to the same energy eigenvalue as .
0 = = , a constant matrix.
0
Why are the characters also const
x
yH
ant?
constant matrices!
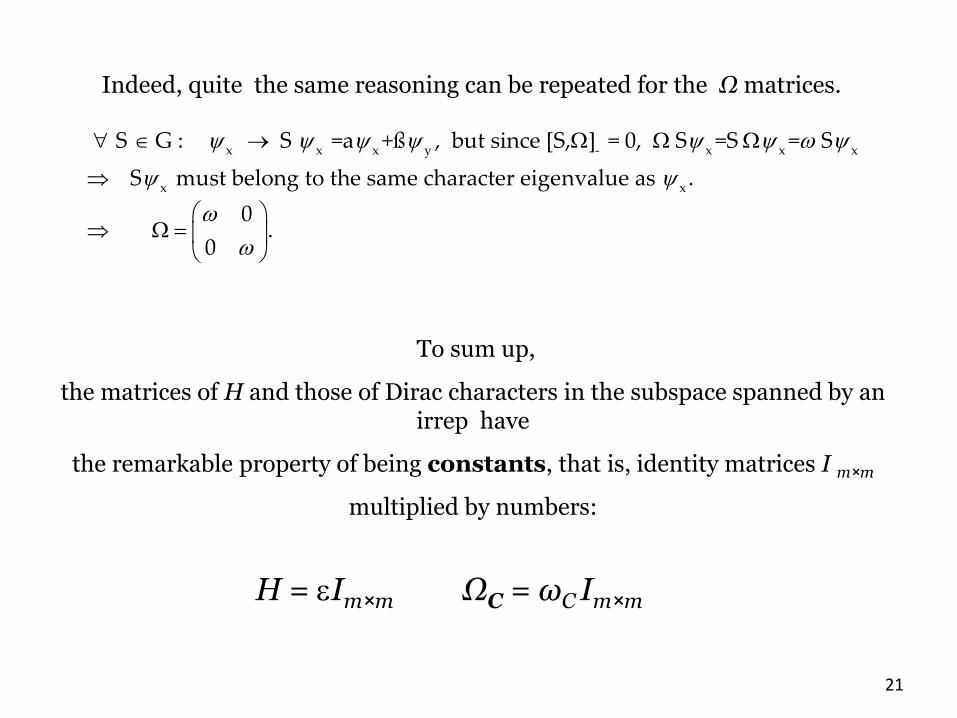
Indeed, quite the same reasoning can be repeated for the Ω matrices.
x x x y - x x x
x x
S G : S =a +ß , but since [S, ] = 0, S =S = S
S must belong to the same character eigenvalue as .
0.
0
To sum up,
the matrices of H and those of Dirac characters in the subspace spanned by an irrep have
the remarkable property of being constants, that is, identity matrices I m×m
multiplied by numbers:
H = Im×m ΩC = ωC Im×m
21
22 22
Schur Lemma . Any m×m matrix M commuting with all the representative matrices
D(Ri), i = 1, · · ·NG of an m-dimensional Irrep must be proportional
to the Identity matrix Im×m.
What characterizes the irrep is that the matrices cannot be taken simultaneously to the same block form, because otherwise the
representation would be reduced. We first prove the lemma for a 2 × 2 diagonal matrix, then generalize to any matrix of any size.
23 23
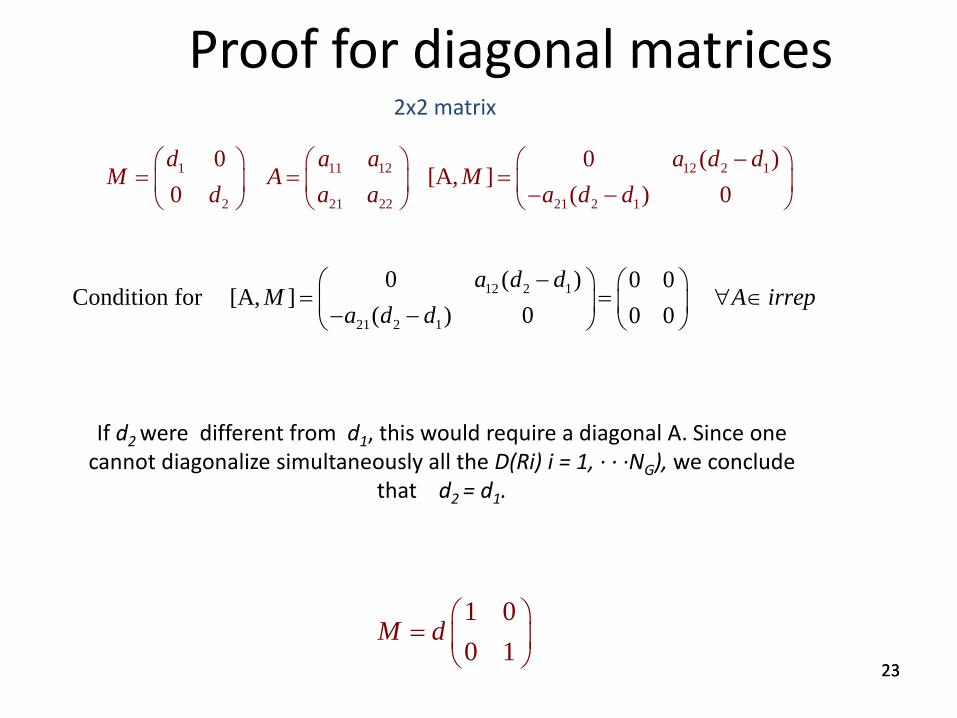
Proof for diagonal matrices 2x2 matrix
1 11 12 12 2 1
2 21 22 21 2 1
0 0 ( )[A, ]
0 ( ) 0
d a a a d dM A M
d a a a d d
12 2 1
21 2 1
0 ( ) 0 0Condition for [A, ]
( ) 0 0 0
a d dM A irrep
a d d
If d2 were different from d1, this would require a diagonal A. Since one cannot diagonalize simultaneously all the D(Ri) i = 1, · · ·NG), we conclude
that d2 = d1.
1 0
0 1M d
24 24
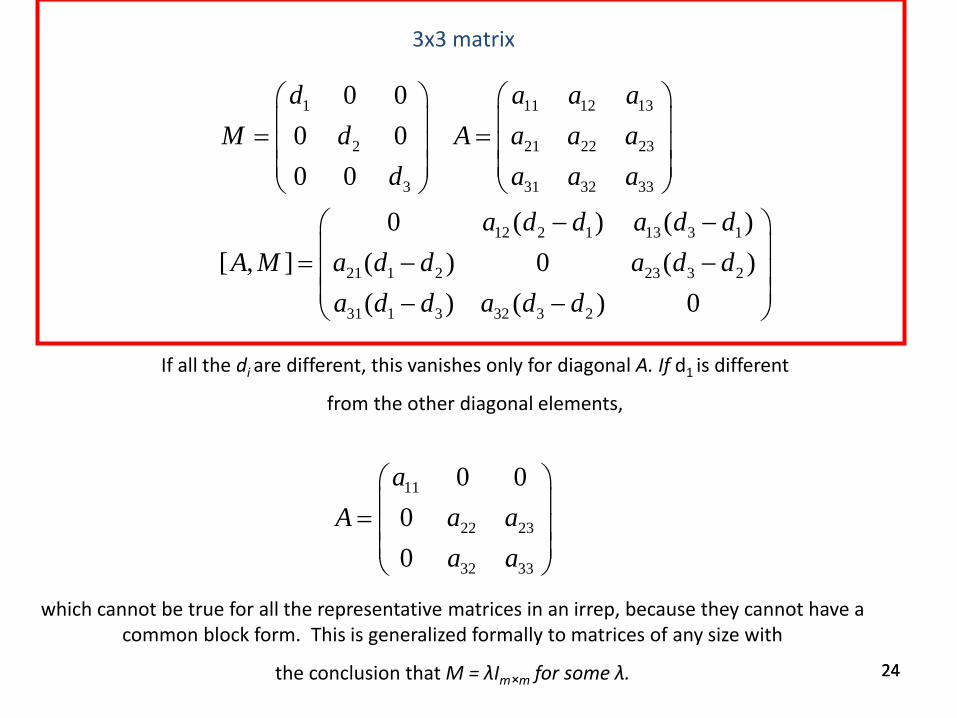
3x3 matrix
1 11 12 13
2 21 22 23
3 31 32 33
12 2 1 13 3 1
21 1 2 23 3 2
31 1 3 32 3 2
0 0
0 0
0 0
0 ( ) ( )
[ , ] ( ) 0 ( )
( ) ( ) 0
d a a a
M d A a a a
d a a a
a d d a d d
A M a d d a d d
a d d a d d
11
22 23
32 33
0 0
0
0
a
A a a
a a
which cannot be true for all the representative matrices in an irrep, because they cannot have a common block form. This is generalized formally to matrices of any size with
the conclusion that M = λIm×m for some λ.
If all the di are different, this vanishes only for diagonal A. If d1 is different
from the other diagonal elements,
25 25
nxn diagonal matrix: similar proof
Extension to Hermitean matrices
Assuming M hermitean we know that by a unitary transformation U it can be diagonalized. U sends M to U · M · U† = diagonal and the set A to the set U · A· U†
which still represent the same irrep and commute with U · M · U† . Then U · M · U† = diagonal= λIm×m and actually this implies that
M is such in any basis since U † · Im×m · U =Im×m .
26 26
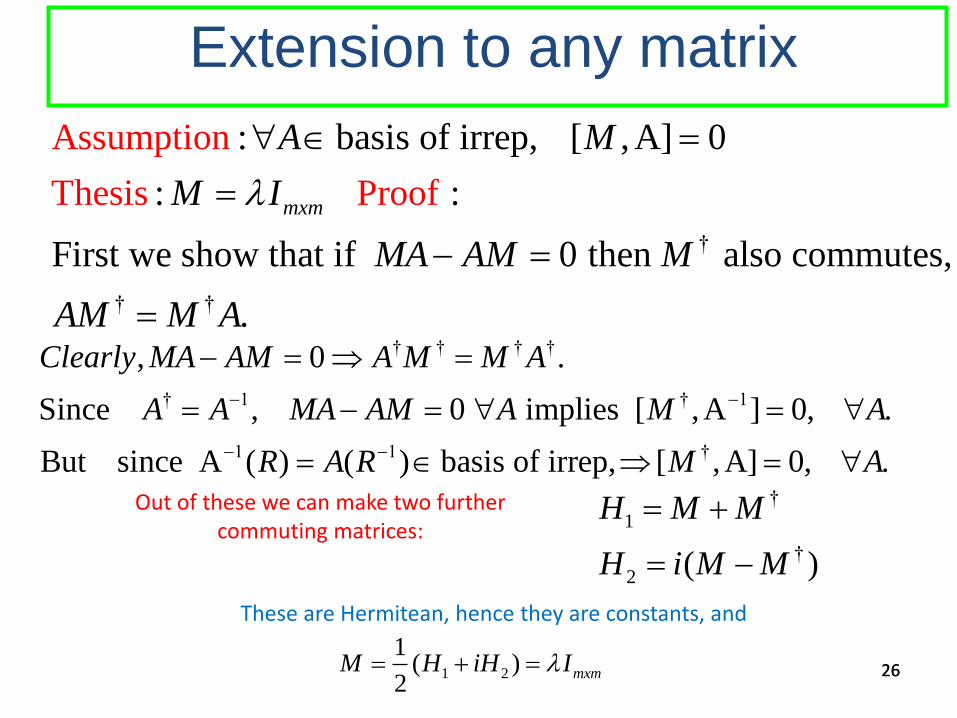
Extension to any matrix
†
† †
: basis of irrep, [ , A] 0
: :
First we show that if 0 then also commute
Assumption
Thesis Proof
s,
.
mxm
A M
M I
MA AM M
AM M A
† † † †
† 1 † 1
1 1 †
, 0 .
Since , 0 implies [ ,A ] 0, .
But since A ( ) ( ) basis of irrep, [ ,A] 0, .
Clearly MA AM A M M A
A A MA AM A M A
R A R M A
Out of these we can make two further commuting matrices:
†
1
†
2 ( )
H M M
H i M M
These are Hermitean, hence they are constants, and
1 2
1( )
2mxmM H iH I
27 27
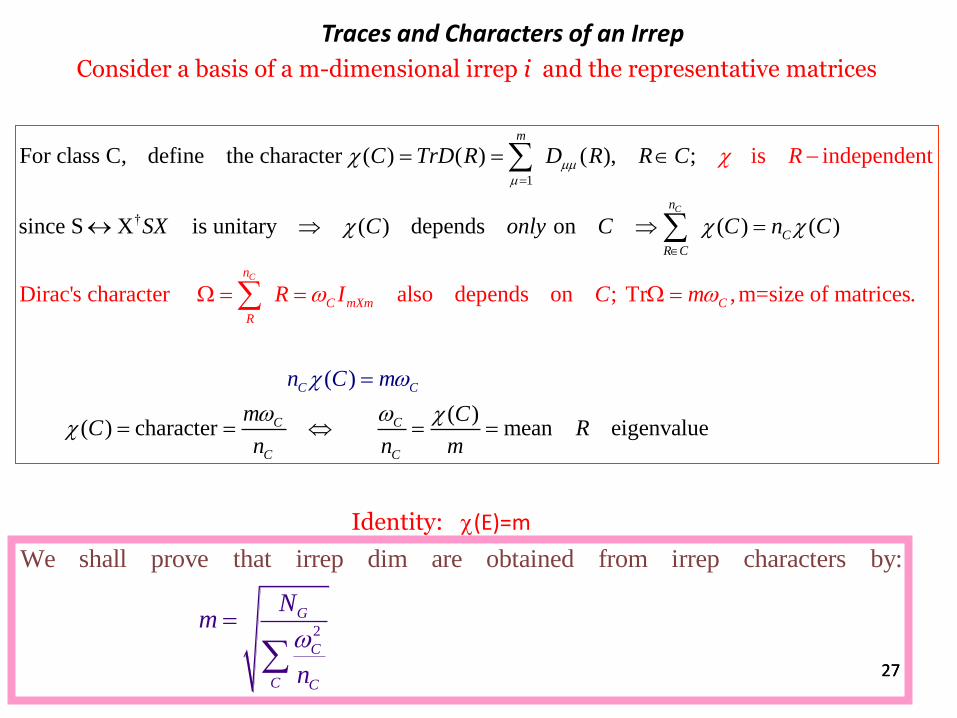
Traces and Characters of an Irrep
Consider a basis of a m-dimensional irrep i and the representative matrices
1
†
For class C, define the character ( ) ( ) ( ), ;
si
is independent
Dirac's character also dep
nce S X is unitary ( ) depends
ends on ; Tr ,m=
on ( )
siz
)
(
e
C
C
m
n
C
R
n
C
C
mXm C
R
C TrD R D R R C
SX C only C C n
R
R I C m
C
( )( ) character mean eigenval
of matr
( )
ue
ices.
C
C C
C
C
C
m CC R
n n m
n C m
Identity: (E)=m
2
We shall prove that irrep dim are obtained from irrep characters by:
G
C
C C
Nm
n
28 28
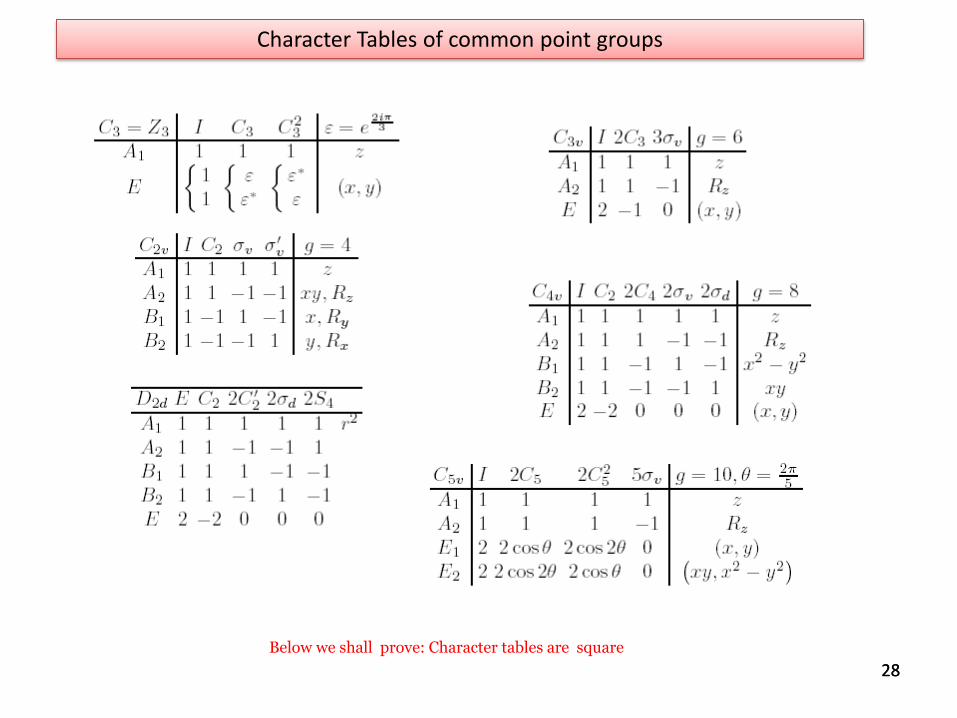
Character Tables of common point groups
Below we shall prove: Character tables are square
29 29
30 30
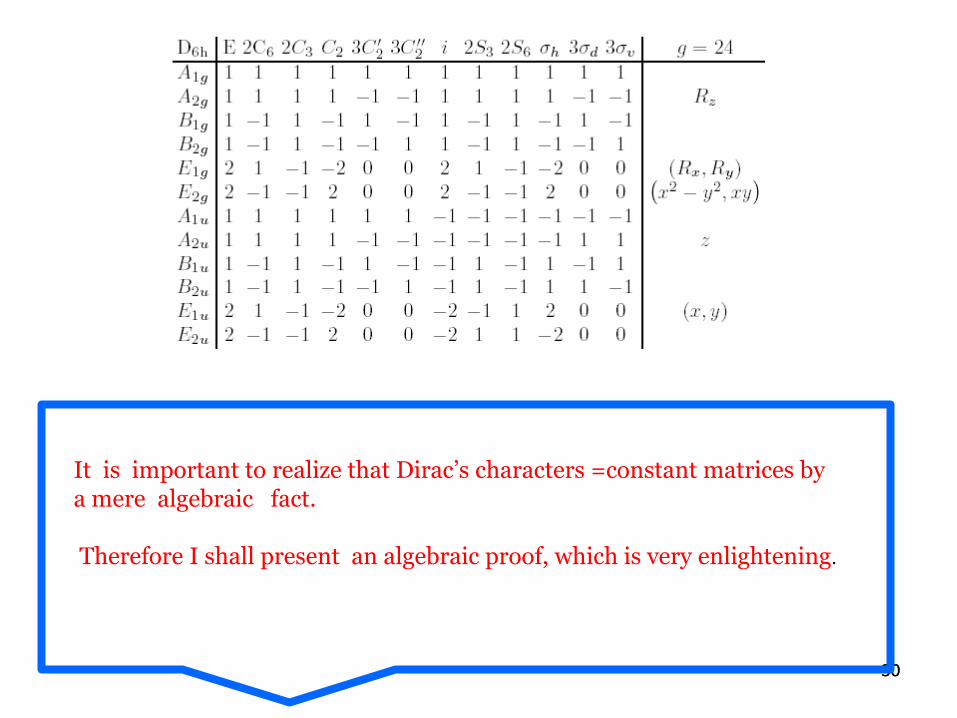
It is important to realize that Dirac’s characters =constant matrices by a mere algebraic fact. Therefore I shall present an algebraic proof, which is very enlightening.
31
( )( ) *( ) ( )GN
ji Gij
R G i
ND R D R
m
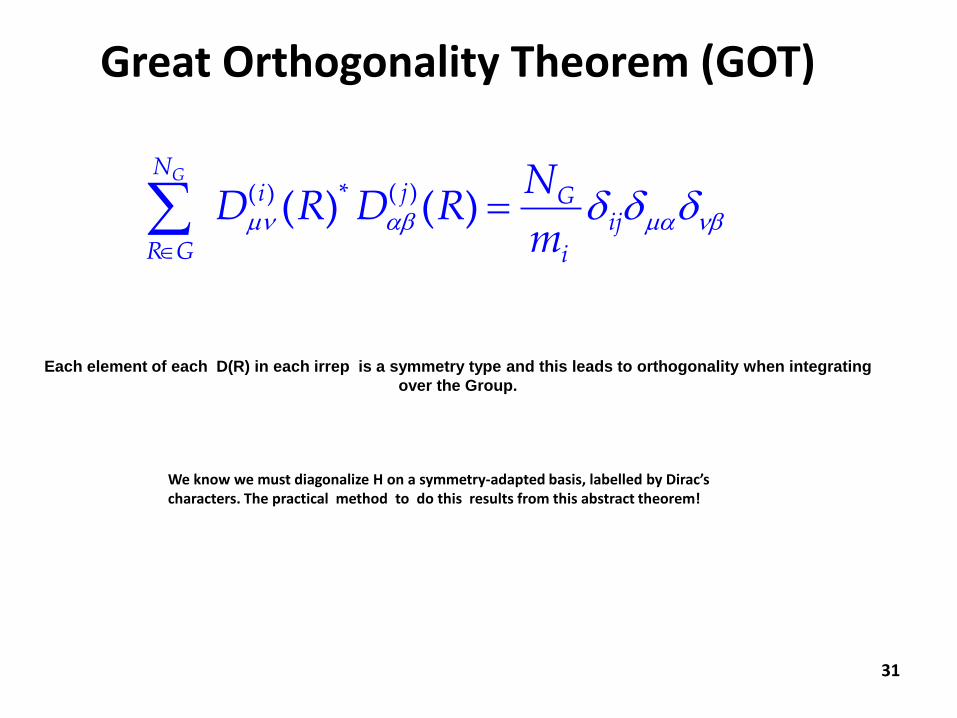
Great Orthogonality Theorem (GOT)
We know we must diagonalize H on a symmetry-adapted basis, labelled by Dirac’s characters. The practical method to do this results from this abstract theorem!
Each element of each D(R) in each irrep is a symmetry type and this leads to orthogonality when integrating
over the Group.
32 32
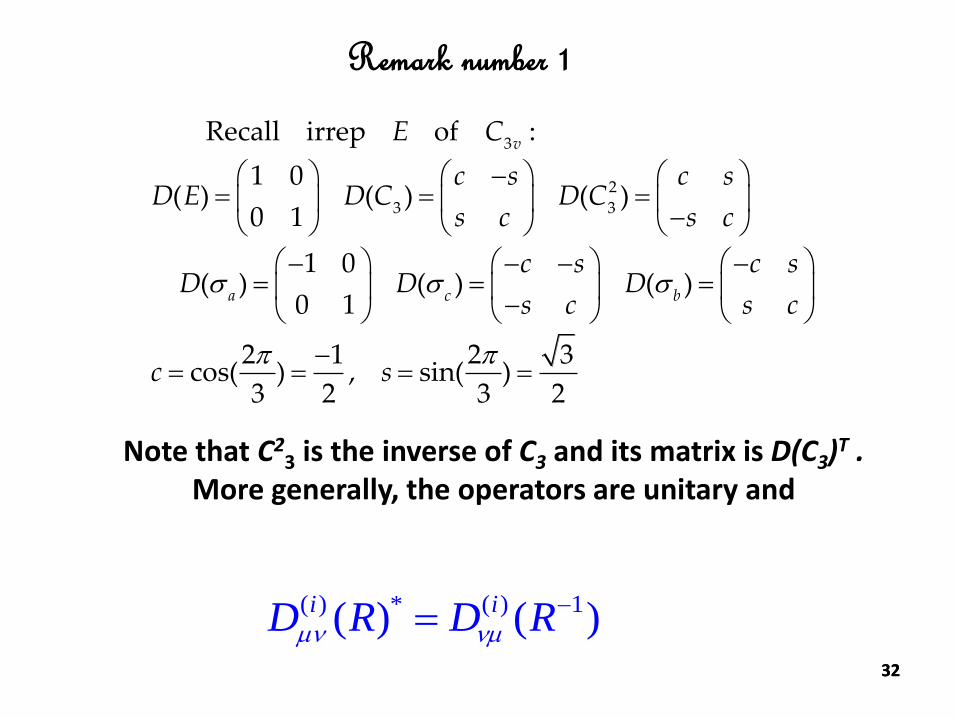
Remark number 1
( ) * ( ) 1( ) ( )i iD R D R
s s s
3
2
3 3
Recall irrep of :
1 0( ) ( ) ( )
0 1
1 0( ) ( ) ( )
0 1
2 1 2 3cos( ) , sin( )
3 2 3 2
v
a c b
E C
c s c sD E D C D C
s c s c
c s c sD D D
s c s c
c s
Note that C23 is the inverse of C3 and its matrix is D(C3)T .
More generally, the operators are unitary and
33 33
Orthogonality on irreps i,j : different good quantum numbers (Dirac characters).
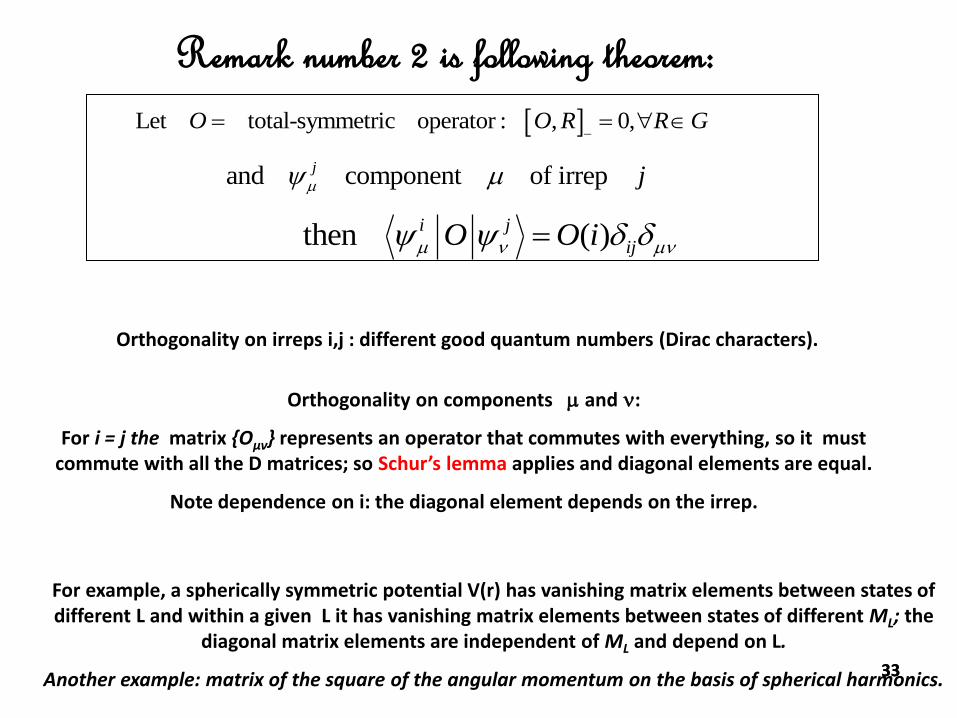
Remark number 2 is following theorem:
Let total-symmetric operator : , 0,O O R R G
and component of irrepj j
then ( )i j
ijO O i
Orthogonality on components and :
For i = j the matrix {Oμν} represents an operator that commutes with everything, so it must commute with all the D matrices; so Schur’s lemma applies and diagonal elements are equal.
Note dependence on i: the diagonal element depends on the irrep.
For example, a spherically symmetric potential V(r) has vanishing matrix elements between states of different L and within a given L it has vanishing matrix elements between states of different ML; the
diagonal matrix elements are independent of ML and depend on L.
Another example: matrix of the square of the angular momentum on the basis of spherical harmonics.
34 34
Theorem:
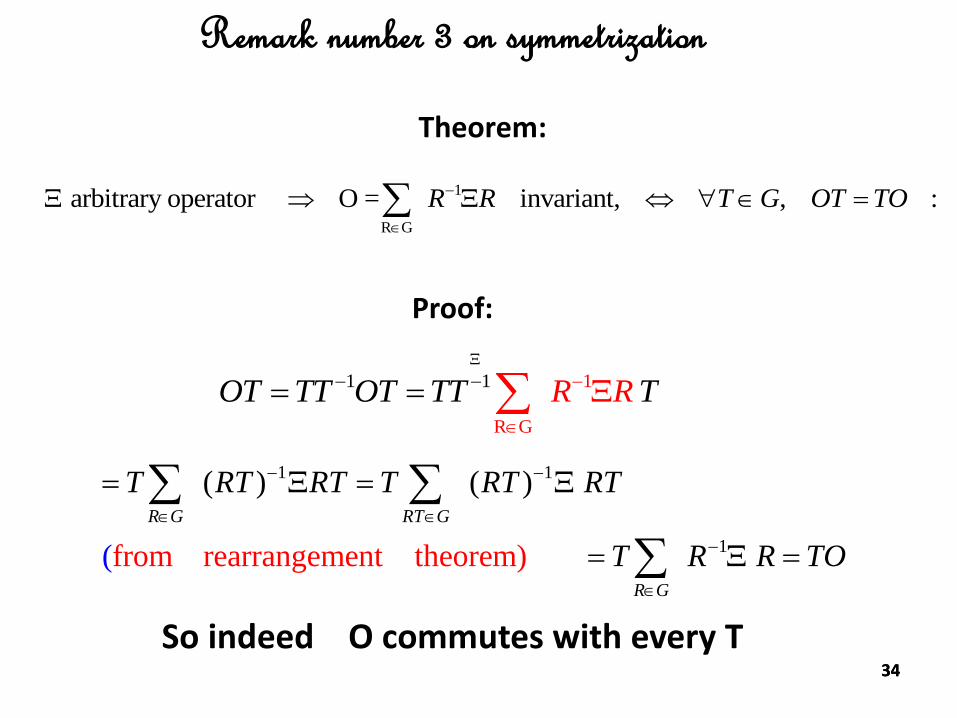
Remark number 3 on symmetrization
So indeed O commutes with every T
11
G
1
R
OT TT OT TT R R T
1 1
1from rearrangement the
( )
(
( )
orem)
R G RT G
R G
T RT RT T RT RT
T R R TO
1
R G
arbitrary operator O = invariant, , :R R T G OT TO
Proof:

35
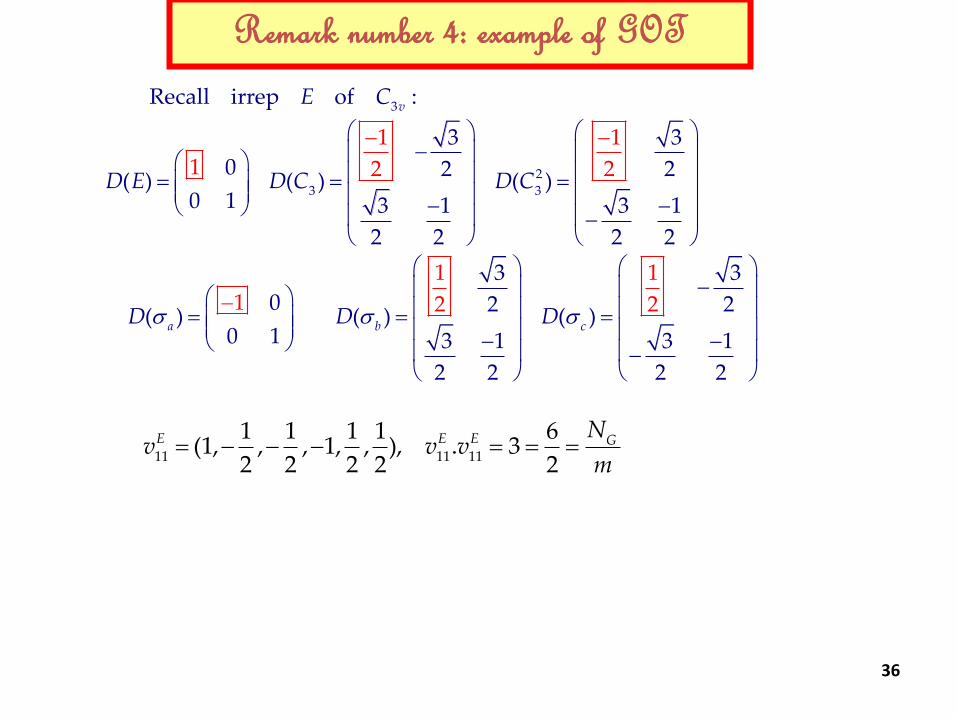
s s s
3
2
3 3
Recall irrep of :
1 3 1 31 0 2 2 2 2( ) ( ) ( )0 1 3 1 3 1
2 2 2 2
1 3 1 31 0 2 2 2 2( ) ( ) ( )
0 1 3 1 3 1
2 2 2 2
v
a b c
E C
D E D C D C
D D D
Let us form 6-component vectors with the elements of the D matrices.
Remark number 4: example on the working of GOT
36
s s s
3
2
3 3
Recall irrep of :
3 3
0 2 2( ) ( ) ( )
0 1 3 1 3 1
2 2 2 2
3 3
0 2 2( ) ( ) ( )
0 1 3 1 3 1
1 1
1 2 2
1 1
1 2 2
2 2 2 2
v
a b c
E C
D E D C D C
D D D
Remark number 4: example of GOT
11 11 11
1 1 1 1 6(1, , , 1, , ), . 3
2 2 2 2 2E E E G
Nv v v
m
37
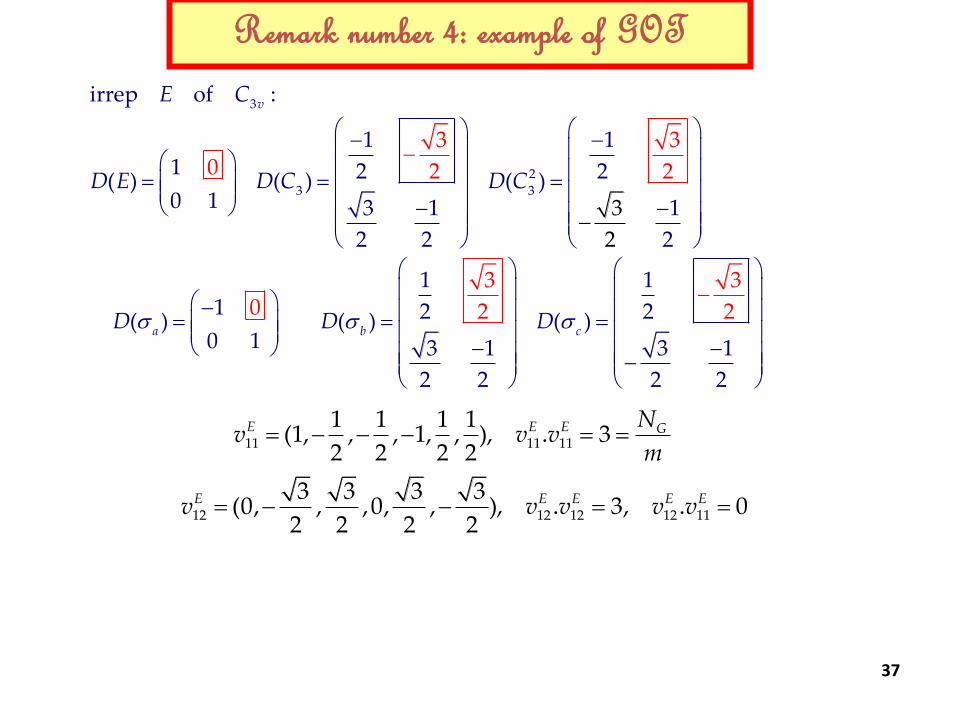
Remark number 4: example of GOT
s s s
3
2
3 3
irrep of :
1 11 2 2( ) ( ) ( )0 1 3 1 1
2 2 2
1 11 2 2( ) ( ) ( )
0 1 3 1 3 1
2 2
3 30 2 2
3 30 2
3
2
2 2
2
v
a b c
E C
D E D C D C
D D D
12 12 12 12 11
3 3 3 3(0, , ,0, , ), . 3, . 0
2 2 2 2E E E E Ev v v v v
11 11 11
1 1 1 1(1, , , 1, , ), . 3
2 2 2 2E E E GNv v v
m

38
Remark number 4: example of GOT
12 12 12 12 11
3 3 3 3(0, , ,0, , ), . 3, . 0
2 2 2 2E E E E Ev v v v v
s s s
3
2
3 3
irrep of :
1 3 1 31 0 2 2 2 2
( ) ( ) ( )1 1 1
2 2
1 3 1 31 0 2 2 2 2
( ) ( ) ( )
0 3 3
2 2
0 3 3
22
1
2 2
1 1
v
a b c
E C
D E D C D C
D D D
21 21 21 21 11 21 12
3 3 3 3(0, , ,0, , ), . 3, . 0, . 0
2 2 2 2E E E E E E Ev v v v v v v
11 11 11
1 1 1 1(1, , , 1, , ), . 3
2 2 2 2E E E GNv v v
m
39
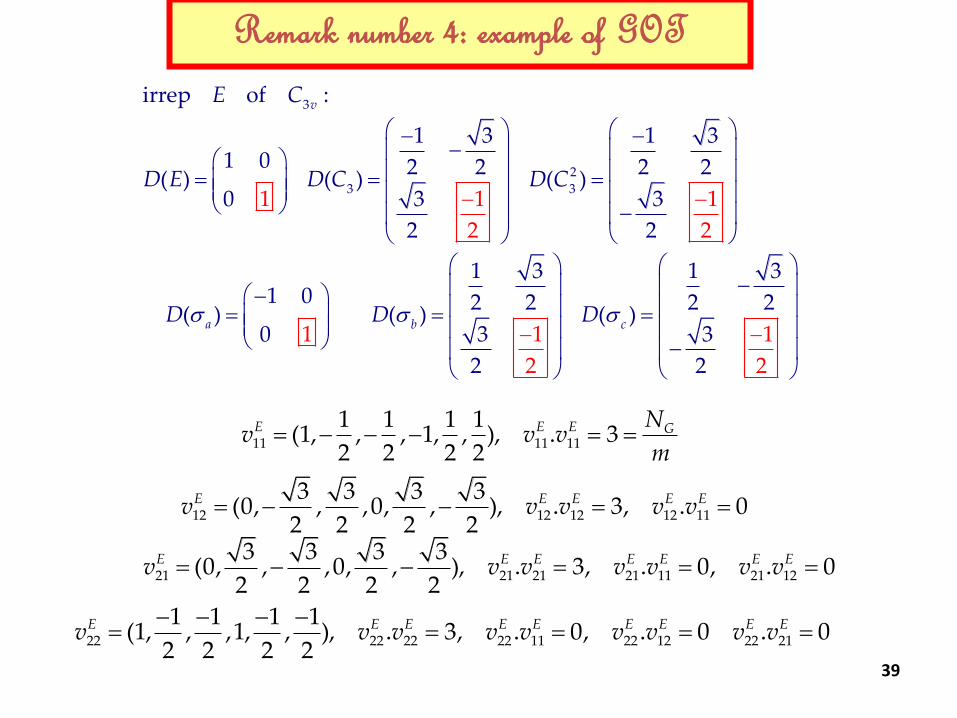
Remark number 4: example of GOT
12 12 12 12 11
3 3 3 3(0, , ,0, , ), . 3, . 0
2 2 2 2E E E E Ev v v v v
s s s
3
2
3 3
irrep of :
1 3 1 31 0 2 2 2 2
( ) ( ) ( )0 3 3
2 2
1 3 1 31 0 2 2 2 2
1 1 1
2 2
1 1 1
2
( ) ( ) ( )0 3 3
2 22
v
a b c
E C
D E D C D C
D D D
22 22 22 22 11 22 12 22 21
1 1 1 1(1, , ,1, , ), . 3, . 0, . 0 . 0
2 2 2 2E E E E E E E E Ev v v v v v v v v
21 21 21 21 11 21 12
3 3 3 3(0, , ,0, , ), . 3, . 0, . 0
2 2 2 2E E E E E E Ev v v v v v v
11 11 11
1 1 1 1(1, , , 1, , ), . 3
2 2 2 2E E E GNv v v
m
40 40
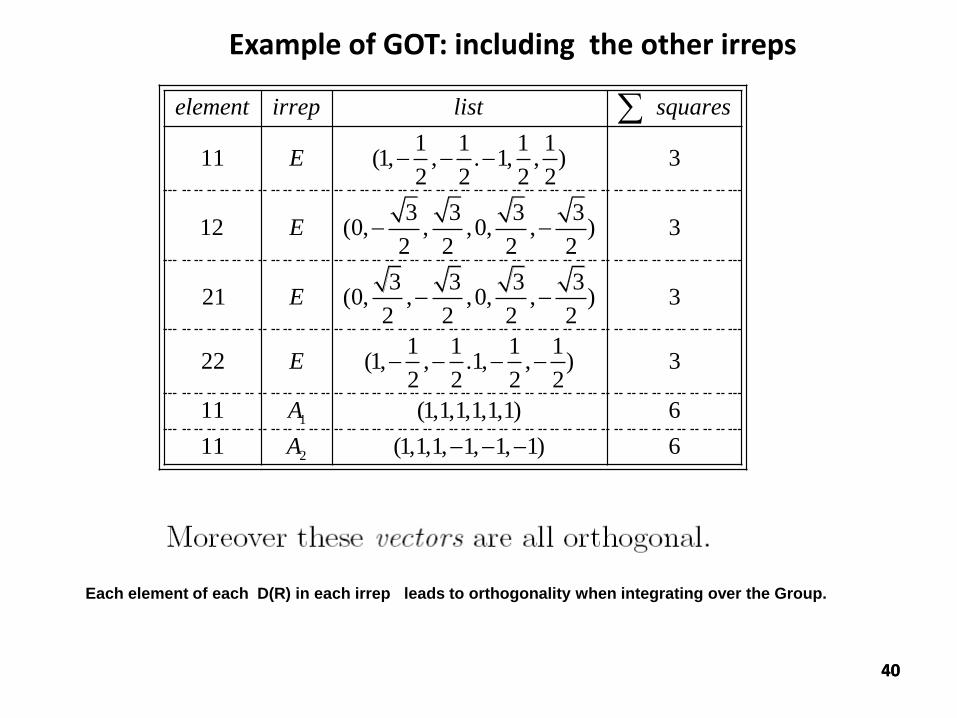
Example of GOT: including the other irreps
1
2
1 1 1 111 (1, , . 1, , ) 3
2 2 2 2
3 3 3 312 (0, , ,0, , ) 3
2 2 2 2
3 3 3 321 (0, , ,0, , ) 3
2 2 2 2
1 1 1 122 (1, , .1, , ) 3
2 2 2 2
11 (1,1,1,1,1,1) 6
11 (1,1,1, 1, 1, 1) 6
element irrep list squares
E
E
E
E
A
A
Each element of each D(R) in each irrep leads to orthogonality when integrating over the Group.
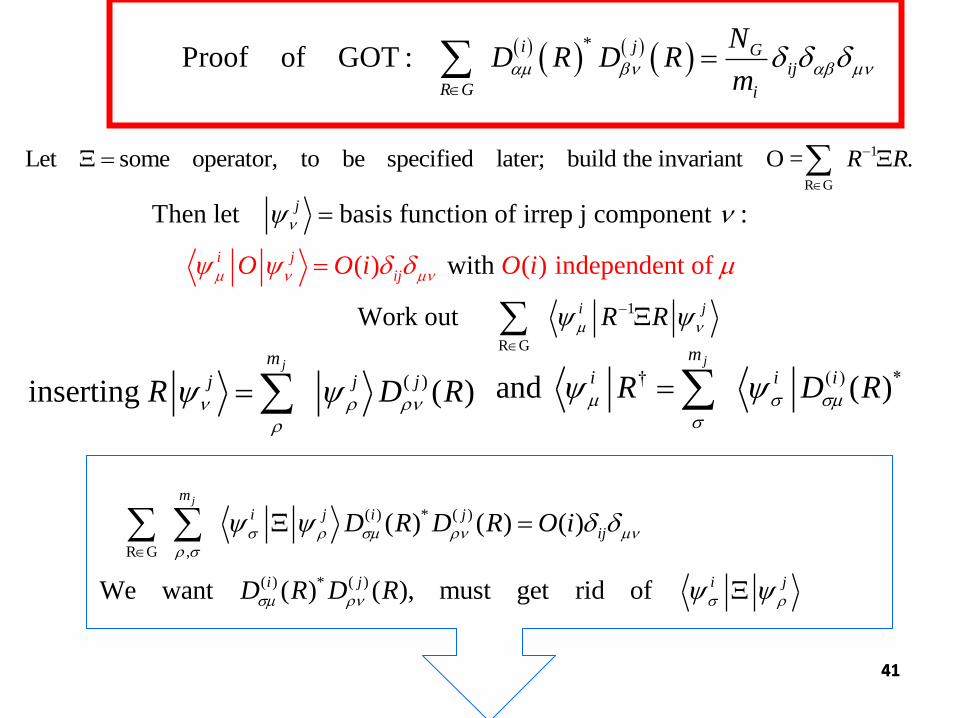
41 41
*
Proof of GOT :i j G
ij
R G i
ND R D R
m
1
R G
Then let basis function of irrep j component :
with
Wo
( ) (
rk out
) independent of
j
i j
i j
ijO O i
R
O i
R
( )inserting ( )jm
j j jR D R
† ( ) *and ( )
jm
i i iR D R s ss
( ) * ( )
R G ,
( ) * ( )
( ) ( ) ( )
We want ( ) ( ), must get rid of
jm
i j i j
ij
i j i j
D R D R O i
D R D R
s s s
s s
1
R G
Let some operator, to be specified later; build the invariant O = .R R
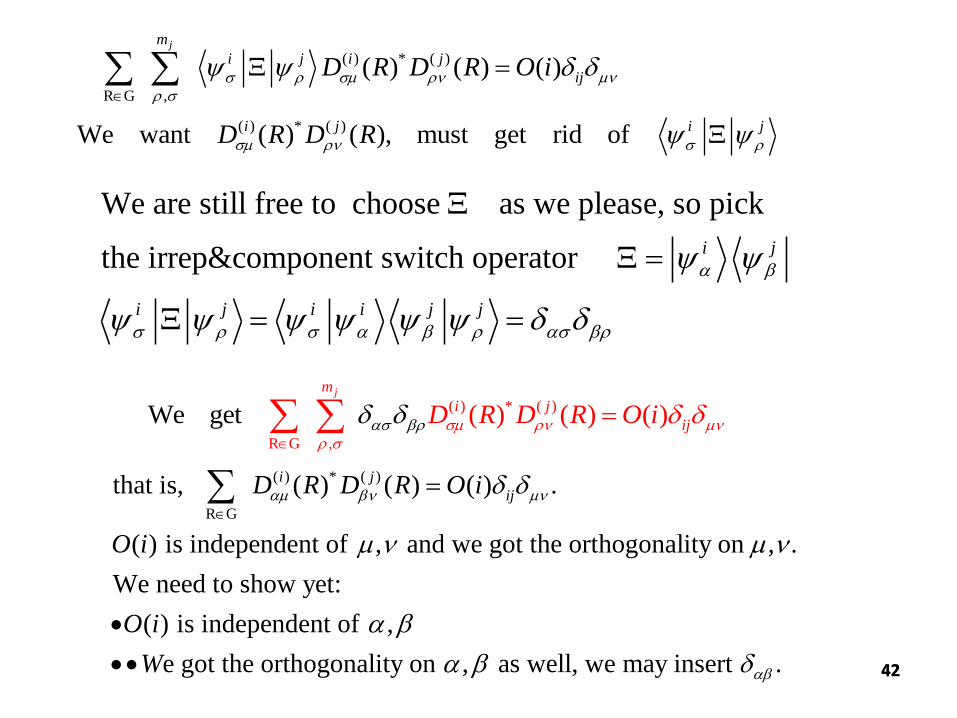
42 42
We are still free to choose as we please, so pick
the irrep&component switch operator i j
i j i i j j
s s s
( ) * ( )
R G ,
We get ( ) ( ) ( )jm
i j
ijD R D R O iss
s
( ) * ( )
R G
that is, ( ) ( ) ( ) .
( ) is independent of , and we got the orthogonality on , .
We need to show yet:
( ) is independent of ,
e got the orthogonality on , as well, we
i j
ijD R D R O i
O i
O i
W
may insert .
( ) * ( )
R G ,
( ) * ( )
( ) ( ) ( )
We want ( ) ( ), must get rid of
jm
i j i j
ij
i j i j
D R D R O i
D R D R
s s s
s s
43
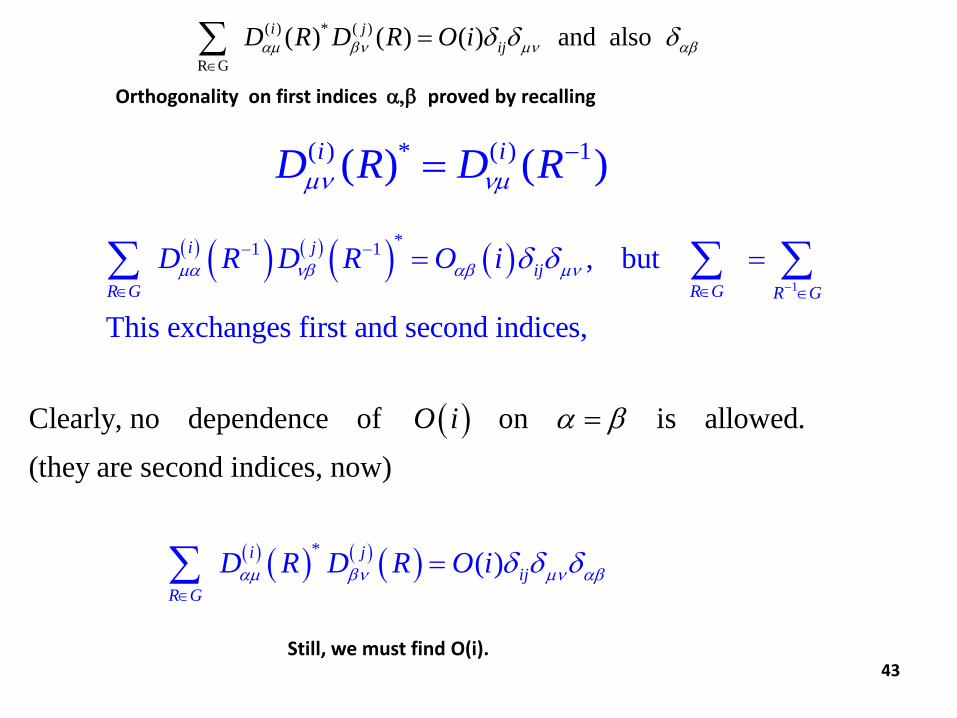
*
( )i j
ij
R G
D R D R O i
Orthogonality on first indices , proved by recalling
( ) * ( ) 1( ) ( )i iD R D R
Clearly, no dependence of on is allowed.
(they are second indices, now)
O i
1
*1 1 , but
This exchanges first and second indices,
i j
ij
R G R G R G
D R D R O i
Still, we must find O(i).
( ) * ( )
R G
( ) ( ) ( ) and also i j
ijD R D R O i
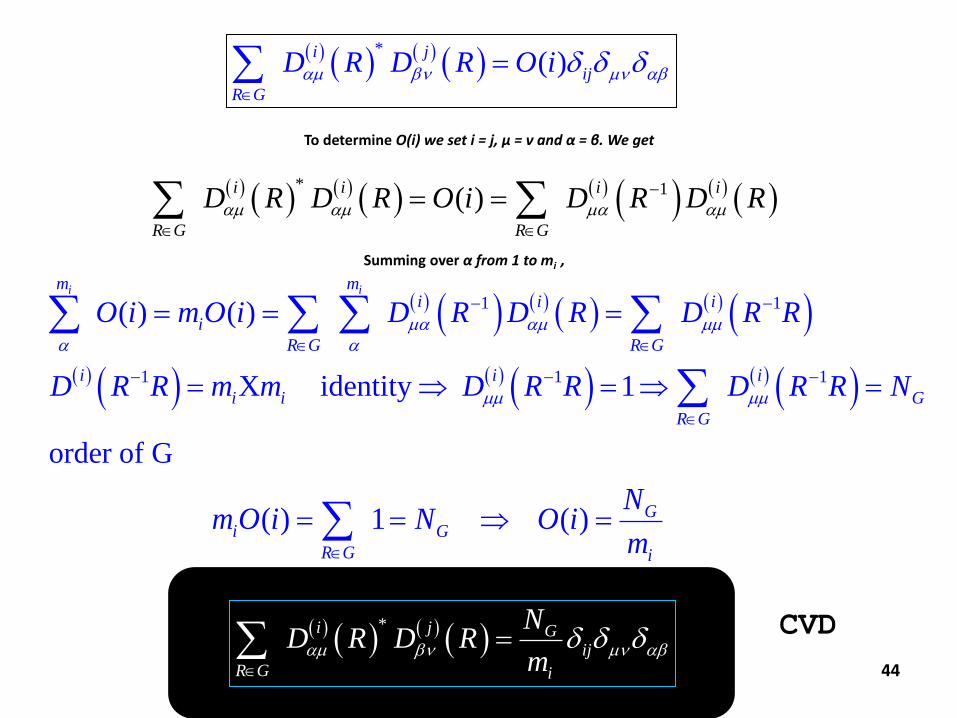
44
To determine O(i) we set i = j, μ = ν and α = β. We get
* 1( )
i i i i
R G R G
D R D R O i D R D R
Summing over α from 1 to mi ,
1 1
1 1 1
( ) ( )
X identity 1
order of G
i im mi i i
i
R G R G
i i i
i i G
R G
O i m O i D R D R D R R
D R R m m D R R D R R N
( ) 1 ( ) Gi G
R G i
Nm O i N O i
m
*i j G
ij
R G i
ND R D R
m
CVD
*
( )i j
ij
R G
D R D R O i
45 45
Many Groups of fundamental importance in Physics are Lie Groups.
They are continuous (elements can be labeled by parameters) and continuously connected ( for every pair of elements a continuous path in parameter space
can be found that joins them). Moreover, the parameters of the products are
C1 functions of those of the factors.
A compact Lie Group has all parameters that vary over a closed interval;
the Lorentz Group and the Group of all translations are noncompact Lie
Groups, while the rotations are a compact Lie Group.
Marius Sophus Lie 1842-1899
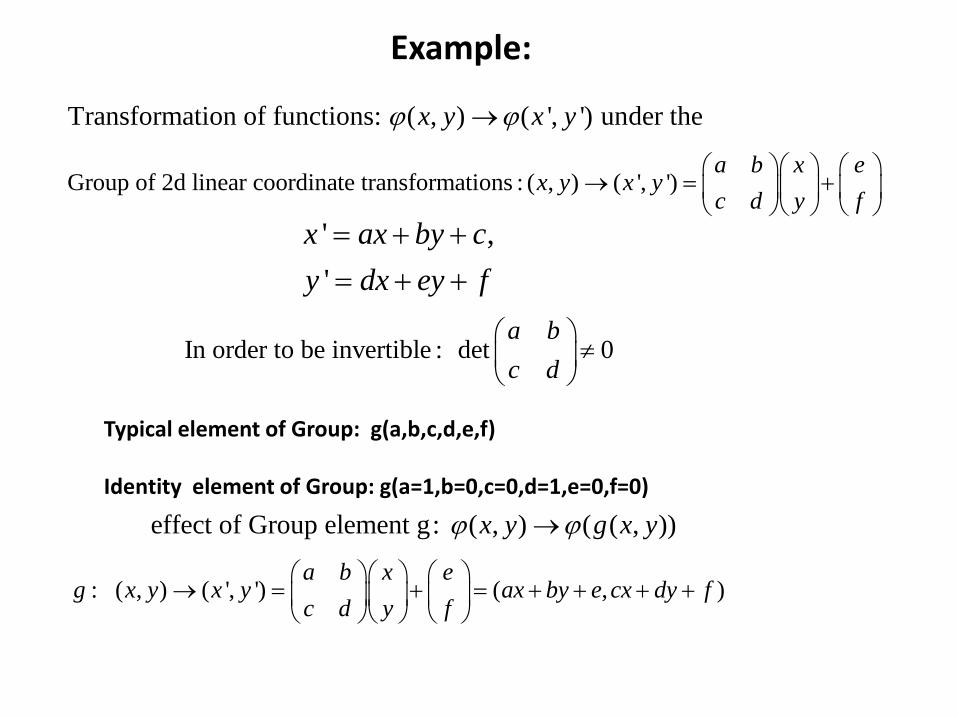
Example:
' ,
'
x ax by c
y dx ey f
In order to be invertible : det 0a b
c d
Typical element of Group: g(a,b,c,d,e,f) Identity element of Group: g(a=1,b=0,c=0,d=1,e=0,f=0)
Group of 2d linear coordinate transformations : ( , ) ( ', ')a b x e
x y x yc d y f
Transformation of functions: ( , ) ( ', ') under thex y x y
effect of Group element g: ( , ) ( ( , ))x y g x y
: ( , ) ( ', ') ( , )a b x e
g x y x y ax by e cx dy fc d y f
for example:
0
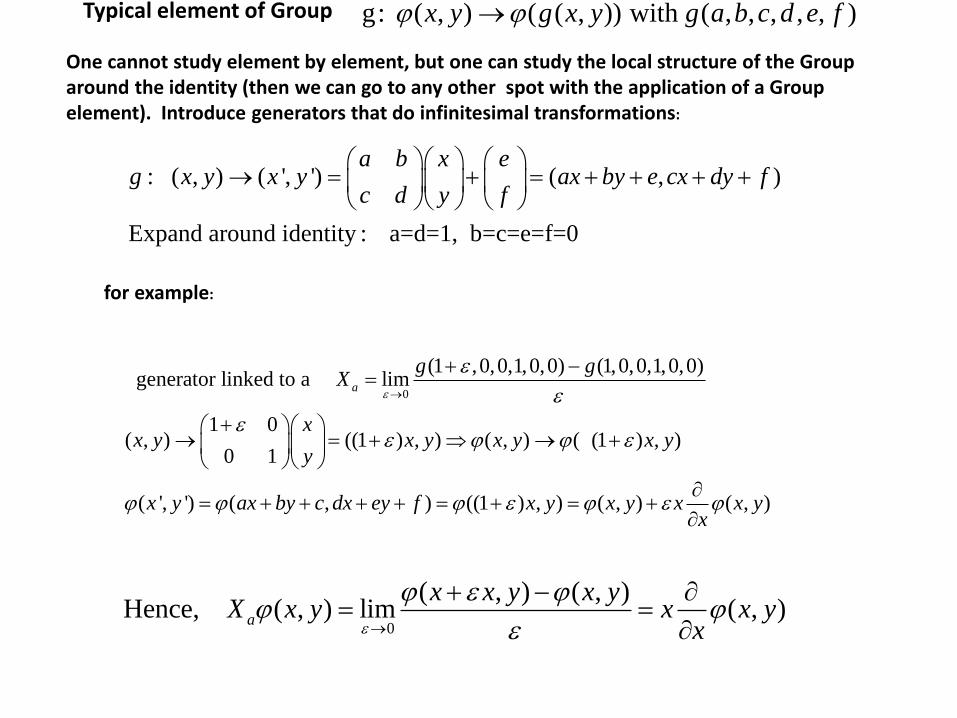
( , ) ( , )Hence, ( , ) lim ( , )a
x x y x yX x y x x y
x
0
(1 ,0,0,1,0,0) (1,0,0,1,0,0) generator linked to a lim
1 0( , ) ((1 ) , ) ( , ) ( (1 ) , )
0 1
( ', ') ( , ) ((1 ) , ) ( , ) ( , )
a
g gX
xx y x y x y x y
y
x y ax by c dx ey f x y x y x x yx
One cannot study element by element, but one can study the local structure of the Group around the identity (then we can go to any other spot with the application of a Group element). Introduce generators that do infinitesimal transformations:
Typical element of Group g: ( , ) ( ( , )) with ( , , ), , ,g a b c dx y g x y e f
: ( , ) ( ', ') ( , )
Expand around identity : a=d=1, b=c=e=f=0
a b x eg x y x y ax by e cx dy f
c d y f
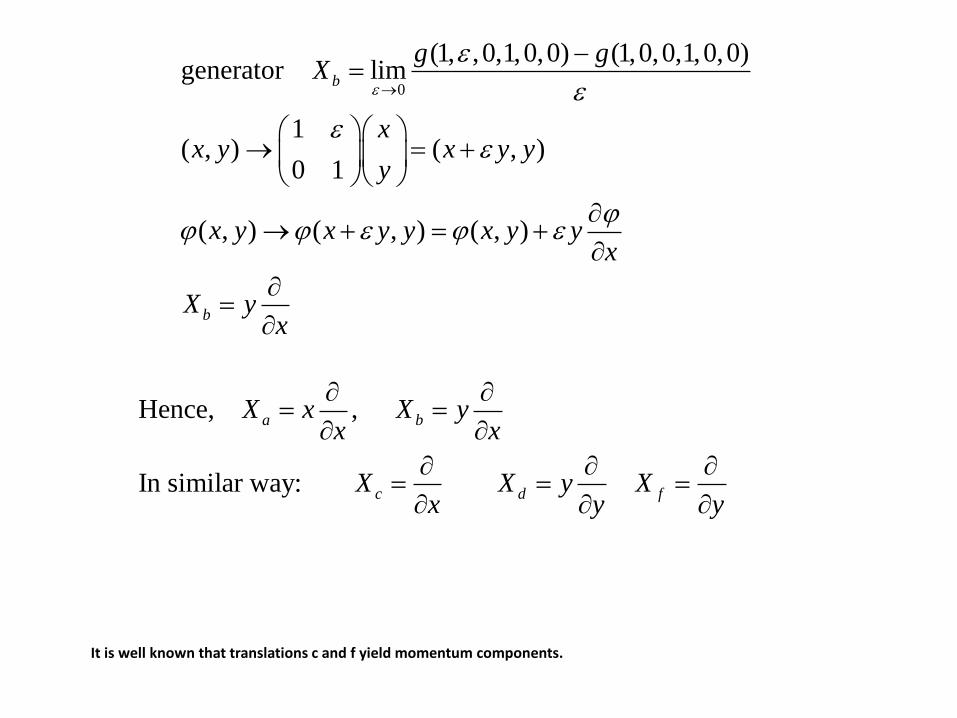
Hence, ,
In similar way:
a b
c d f
X x X yx x
X X y Xx y y
It is well known that translations c and f yield momentum components.
0
(1, ,0,1,0,0) (1,0,0,1,0,0)generator lim
1( , ) ( , )
0 1
( , ) ( , ) ( , )
b
b
g gX
xx y x y y
y
x y x y y x y yx
X yx
k
ij[ c =structure constant] s, k
i j ij k
k
X X c X
General theorem for Lie Groups:
Recall: where generates O(3)iL
L L i L L R e
The SO(3) Group of
rotations in 3d (SO=Special Orthogonal) is a continuous Group. An element may be represented as a vector φ directed along the axis and
with length equal to the angle of (say, counterclockwise) rotation φ; this corresponds to a sphere of radius π where,
however, each point of the surface is equivalent to the opposite one.
All the
rotations with the same |φ| belong to the same class..
The generators of SO(4) :
[I ,I ]=i I
[K ,K ]=i with [I , ] 0.
i j ijk k
i j ijk k i j
obey
K K
Recall: where generates O(3)
( ) and cyclic permutations (3 components).
iL
x z y
L L i L L
R e
L i yp zp
many operators generate O(4)?
46 generators are needed.
2
How
This is the algebra of SO(4). Fore more details see L.Schiff Quantum Mechanics page 235
51 51
Double valued spin representation and Covering Group
(2) covering Group of (3) : identity for 4SU O
fill a sphere of radius 2 in SU(2), in SO(3)
2
20,0
.
( 2 )1 0( 2 ) 20 12
(0,0, 2 ) (0,0, )( 2 )
2
,
2
1For , rotation matrix around z is
2
; however,
0is 2 valu
0
0
More gener
ed
a
:
0
lly,
z
i S
ii
i
i
i
i
J
R e
eR R e R
e
eR e
e
s
The angular momentum operator L is the generator of infinitesimal rotations. For integer L one finds
2L+1 spherical harmonics YLM(θ, φ) that are simultaneous eigenvectors of
L2 and Lz. Only the harmonics of a given L mix under rotations; they are
the basis of an irrep labelled by L.
' '
'
' , 'j
j j
m m m m
m j
R jm jm D D jm R jm
52
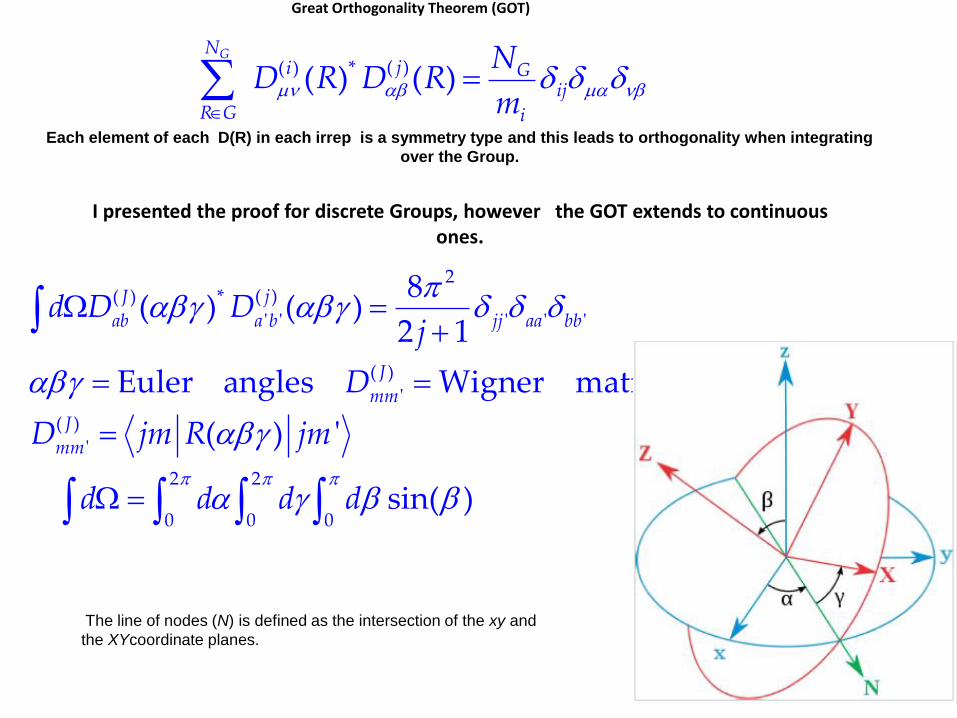
( )( ) *( ) ( )GN
ji Gij
R G i
ND R D R
m
Great Orthogonality Theorem (GOT)
I presented the proof for discrete Groups, however the GOT extends to continuous ones.
2( )( ) *
' ' ' ' '
( )
'
( )
'
2 2
0 0 0
8( ) ( )
2 1
Euler angles Wigner matrices
( ) '
sin( )
jJ
ab a b jj aa bb
J
mm
J
mm
d D Dj
D
D jm R jm
d d d d
Each element of each D(R) in each irrep is a symmetry type and this leads to orthogonality when integrating
over the Group.
The line of nodes (N) is defined as the intersection of the xy and
the XYcoordinate planes.