
Survey Bmis 2011
73
Short Survey of Brain Machine Interfaces Jose C. Principe, Ph.D. Distinguished Professor ECE, BME Computational NeuroEngineering Laboratory Electrical and Computer Engineering Department University of Florida www.cnel.ufl.edu [email protected]
Transcript of Survey Bmis 2011

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 1/73
Short Survey of Brain Machine Interfaces
Jose C. Principe, Ph.D.Distinguished Professor ECE, BME
Computational NeuroEngineering LaboratoryElectrical and Computer Engineering Department
University of Floridawww.cnel.ufl.edu

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 2/73
Acknowledgments
Dr. Justin Sanchez, University of Florida
Dr. Phil Kim, Brown University
My students: Yiwen WangAntonio PaivaIl ParkAysegul Gunduz
NSF (DDDAS, CRCNS), NIH NIBIB, DARPA

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 3/73
Outline
Brain Machine InterfaceDefinitionsTypes
Hardware challengesBMI Models using rate codesBMI Models using spike trains

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 4/73
Why is a New Neurotechnology Emerging?
Synergistic advances inNeuroscience
Understanding the brain as information processingsystem, localization, coding
Physical InterfacesTiny size, stable materials, effective at sensing andstimulating
Device miniaturizationLow power electronics, fast computers, algorithms

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 5/73
Brain Machine Interfaces (BMI)
A man made device that either substitutes asensory input to the brain, repairs functionalcommunication between brain regions ortranslates intention of movement.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 6/73

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 7/73
Deep Brain Stimulation (DBS)
Donoghue, 2005
Parkinson's disease
Medtronics

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 8/73
Vagal Nerve Stimulation
EpilepsyMood disorders
Cyberonics

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 9/73
Cochlear Implants
(http://www.cochlear.com)
Electronics(12-22 channels)
battery
microphone
Headpiece(antenna)
Internal receiverstimulator
wires
Electrodes(12-22)
AuditoryNerve

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 10/73
Visual prosthesis
Prof. J. Lobo Antunes was involved in this project
http://www.artificialvision.com/vision/asaio1.html

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 11/73
Cognitive/Memory Prosthesis
Berger et al, 2008
damage

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 12/73
Neuromotor ProsthesisFrom Thought to Action
Many neuropathies leave cognition intact but disrupt thecontrol of the motor system
Spinal cord injury
ALSCerebral palsyStrokeLock-in syndromeMuscular dystrophy/atrophyLimb loss
Goal is to bypass the motor system and create a directpath between the cortex and an external device.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 13/73
Proof of Concept…and media fanfare!
What are the underlying principles behind neural control of devices?
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 14/73
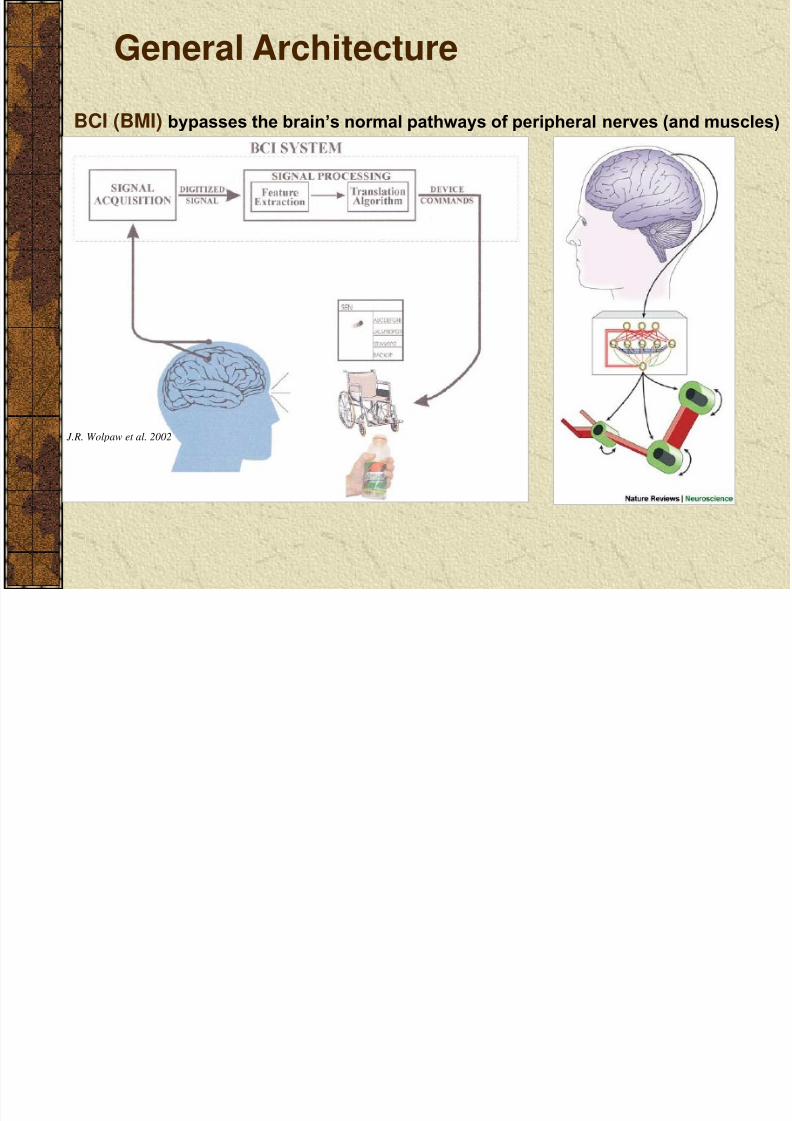
J.R. Wolpaw et al. 2002
BCI (BMI) bypasses the brain’s normal pathways of peripheral nerves (and muscles)
General Architecture

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 15/73
INTENT
PERCEPT
ACTION
STIMULUS
Decoding
Coding
BRAIN MACHINE
Neural Interface Physical Interface
The Fundamental Concept
Stimulus Neural Response
Coding Given To be inferred
Decoding To be inferred Given
Need to understand how brain processes information .

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 16/73
Levels of Abstraction for Neurotechnology
Brain is an extremelycomplex system
10 12 neurons
1015
synapsesSpecificinterconnectivity

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 17/73
Tapping into the Nervous System
The choice and availability of brain signals andrecording methods can greatly influence the ultimateperformance of the BMI.
The level of BMI performance may be attributed toselection of electrode technology, choice of model , andmethods for extracting rate, frequency , or timing codes.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 18/73
http://ida.first.fhg.de/projects/bci/bbci_official/
Coarse(mm)

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 19/73
Choice of Scale for Neuroprosthetics
Bandwidth(approximate) Localization
ScalpElectrodes
0 ~ 80 Hz VolumeConductionCortical Surface
Electro-corticogram(ECoG)
0 ~ 500Hz Cortical Surface
Implanted
Electrodes
0 ~ 7kHz Single Neuron

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 20/73
Spatial Resolution of Recordings
Moran

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 21/73

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 22/735/5/2012 22
Examples of Multiscale Signals
Scalp EEGPenfield
Spikes andLFPs
In vivo extracellular
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 23/73
Common BMI-BCI Methods
BMIs --- Invasive, work with intention of movement• Spike trains, field potentials, ECoG• Very specific, potentially better performance
BCIs --- Noninvasive, subjects must learn how to control theirbrain activity
• EEG• Very small bandwidth

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 24/73
Brain Computer Interfaces (BCI) EEG
Sensory Motor Rhythm
Wasdworth Center, NY

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 25/73
How to put it together?
NeoCortical Brain Areas Related to Movement
Posterior Parietal (PP) – Visual to motortransformation
Premotor (PM) and DorsalPremotor (PMD) -
Planning and guidance
(visual inputs)
Primary Motor (M1) – Initiates muscle contraction

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 26/73
Electrophysiology:Electrode Arrays
50 μm polyimide insulatedtungsten250 μm separationWire impedance of 500K – 1.5M Ω

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 27/73
two polyimide cables
•Flexible polyimide cableintegrated with rigid metalelectrodes
Design StrategyMetal electrodes(array of 16)
Glass (Pyrex) wafer
Cured Polyimide
Sputter nickel, pattern via lift-off
Coat with polyimide,Etch polyimide from contact pads &probe tip, Insulate free probe tips(CVD Parylene C)
Remove from substrate
Cut out individual probes
Footing to prescribe insertion depth
•Batch fabricated toreduce assembly time
UF Electrode Arrays
0 0.01 0.02 0.03 0.04-40
-30
-20
-10
0
10
20
30
40
50
Time (s)
M i c r o v o l t s
J. C. Sanchez , N. Alba, T. Nishida, C. Batich, and P. R. Carney,"Structural modifications in chronic microwire electrodes for corticalneuroprosthetics: a case study," IEEE Transactions on Neural
Systems and Rehabilitation Engineering , 2006

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 28/73
28mm
15mm
12mm Thru vias toRX/Power Coil
+
12.5 mm
Coil winding
3.5 mm
50µm pitchElectrodes
Coin Battery(10 x 2.5 mm)
Thru vias to Battery
Supportingscrews
Flexiblesubstrate
TX antenna
ModularElectrodes
Electrodeattachment
sites
IF-IC
RFIC
18 mm
Coil
Battery
PatternedSubstrate
SupportingSubstrate
ElectrodeArray
IC
Flip-chipconnection
Specifications:16 flexible microelectrodes (40 dB, 20 KHz)
Wireless (500 Kpulse/sec)2mW of power (72-96 hours between charges)
FWIRE: Florida Wireless ImplantableRecording Electrodes

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 29/73
RatPackLow-Power, Wireless, Portable BMIs
RequirementsTotal Weight: < 100gSmall Form FactorBattery Powered: Run for 4hours64 channels
MethodsCustomized electronicsNovel discriminative codersachieving 64:1 compressionwith high SNRs

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 30/73
UF PICO System (Backpack)
PICO system = DSP + Wireless
Generation 3

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 31/73
Motor Tasks Performed
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
T a s
k 1
T a s k
2
Data• 2 Owl monkeys – Belle,Carmen
• 2 Rhesus monkeys – Aurora, Ivy
• 54-192 sorted cells
• Cortices sampled: PP,M1, PMd, S1, SMA
• Neuronal activity rateand behavior is timesynchronized anddownsampled to 10Hz

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 32/73
100 msec Binned Counts Raster of 105 neurons (spike sorted)
Firing Rates
Time
N e u r o n
N u m b
e r
200 400 600 800 1000 1200 1400 1600 1800 2000
10
20
30
40
50
60
70
80
90
100
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 33/73
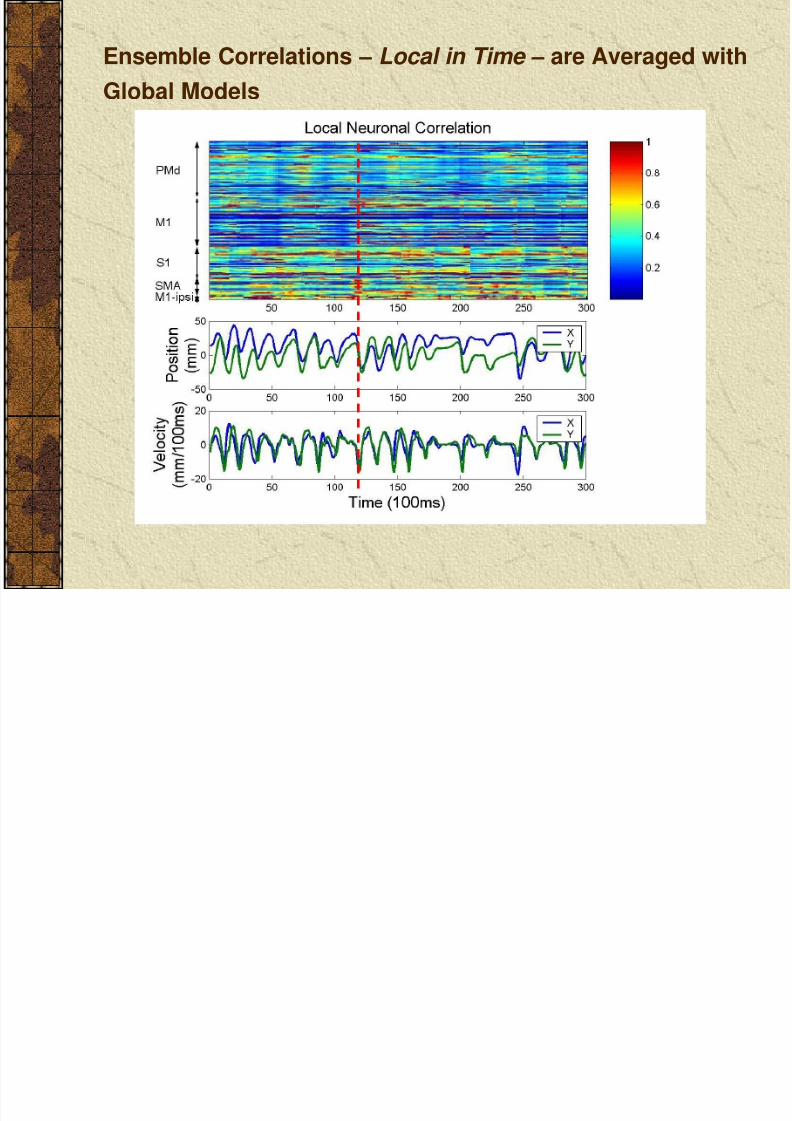
Ensemble Correlations – Local in Time – are Averaged withGlobal Models

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 34/73
Computational Models of Neural Intent
Two different levels of neurophysiology realism
Black Box models – no realism, function relation betweeninput desired response
Generative Models – minimal realism, state space modelsusing neuroscience elements

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 35/73
Signal Processing Approaches with BlackBox Modeling
Accessing 2 types of signals (cortical activity and behavior) leads us to ageneral class of I/O models.
Data for these models are rate codes obtained by binning spikes on 100msec windows.
Optimal FIR Filter – linear, feedforwardTDNN – nonlinear, feedforwardMultiple FIR filters – mixture of expertsRMLP – nonlinear, dynamic

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 36/73
Optimal Linear Model
Ten tap embedding with 105neuronsFor 1-D topology contains1,050 parameters (3,150)
The Wiener solution (coincideswith linear regression)

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 37/73
Optimal Linear ModelLet us assume that a M dimensional multiple time series isgenerated by a stationary stable vector autoregressive (VAR)model (b is a colum vector and W are MxM matrices ofcoefficients)
In matrix notation this can be written X=AZ+U
The multivariate least square estimation chooses the estimatorthat minimizes
)()(...)1()( 1 nu Ln xW n xW bn x L
1][
1)(][
1][
],...,[
)1(],...,[1)1(],...,,1[
)1(],...,,[
],...[
2
1
10
1
1
1
MTxU vec
x M L M Avec
MTx X vec
MxT uuU
xT ML Z Z Z x ML x x Z
ML MxW W b A
MxT x x X
T
T
T
Lnnn
L
T
)}(){()( 11 AZ X AZ X tr J T T
)(2)(2)( 11 Z ZZ
J T
))((ˆ 1 I Z ZZ T 1)( T T ZZ XZ A

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 38/73
Optimal Linear Model
Effectively we use a regularizedsolution
Normalized LMS with weightdecay is a simple starting point.
Four multiplies, one divide andtwo adds per weight update
)()()(
)()1( 2 n xnen x
nwnw
pw 1)( I R

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 39/73
Time-Delay Neural Network (TDNN)
The first layer is a bank of linearfilters followed by a nonlinearity.The number of delays to span Isecondy(n)= Σ wf(Σwx(n))Trained with backpropagationTopology contains a ten tapembedding and five hiddenPEs – 5,255 weights (1-D)
Principe, UF

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 40/73
Multiple Switching Local Models
Multiple adaptive filters that compete to win the modeling of a signalsegment.Structure is trained all together with normalized LMS/weight decayNeeds to be adapted for input-output modeling.We selected 10 FIR experts of order 10 (105 input channels)
d(n)
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 41/73
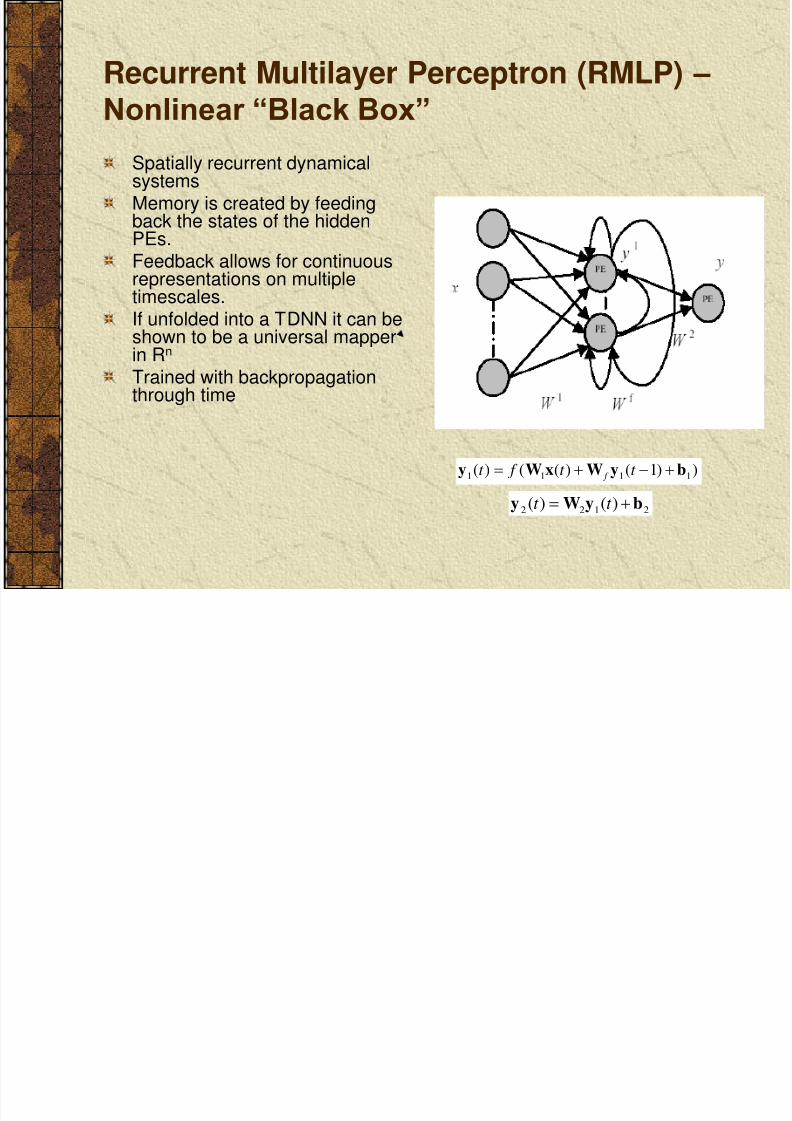
Recurrent Multilayer Perceptron (RMLP) – Nonlinear “Black Box”
Spatially recurrent dynamicalsystemsMemory is created by feedingback the states of the hiddenPEs.Feedback allows for continuous
representations on multipletimescales.If unfolded into a TDNN it can beshown to be a universal mapperin R n Trained with backpropagationthrough time
))1()(()( 1111 byWxWy t t f t f
2122 )()( byWy t t
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 42/73
Model Building Techniques
Train the adaptive system with neuronal firing rates (100 msec) as the input and hand position as thedesired signal.Training - 20,000 samples (~33 minutes of neuronalfiring)Freeze weights and present novel neuronal data.Testing - 3,000 samples – (5 minutes of neuronalfiring)

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 43/73
Results (Belle)
Signal to error ratio (dB) Correlation Coefficient
(average) (max) (average) (max)
LMS 0.8706 7.5097 0.6373 0.9528
Kalman 0.8987 8.8942 0.6137 0.9442
TDNN 1.1270 3.6090 0.4723 0.8525
Local Linear 1.4489 23.0830 0.7443 0.9748
RNN 1.6101 32.3934 0.6483 0.9852
Based on 5 minutes of test data, computed over 4 secwindows (training on 30 minutes)

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 44/73
Computing Sensitivities Through theModels
T
iit
T f t
T
t t
11
22
)()(
WDWDWx
y
))1()(()( 1111 byWxWy t t f t f
2122 )()( byWy t t
Feedforward RMLP Eqs.
General form of RMLPSensitivity
Feedforward Linear Eq.
General form of LinearSensitivity
Wx
y)(
)(t
t
)()( t t Wxy
Identify the neurons that affect the output the most.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 45/73
Data Analysis : The Effect of Sensitive Neurons on Performance
0 20 40 60
-20
0
20
40
60
Hightest Sensitivity Neurons
0 20 40 60
-20
0
20
40
60
Middle Sensitivity Neurons
0 20 40 60
-20
0
20
40
60
Lowest Sensitivity Neurons
0 20 40 60 800
0.2
0.4
0.6
0.8
1
P r o
b a
b i l i t y
3D Error Radius (mm)
Movements (hits) of Test Trajectory
10 Highest Sensitivity
84 Intermediate Sensitivity
10 Lowest Sensitivity
All Neurons
0 20 40 60 80 100 1200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
S e n s
i t i v i t y
Primate 1, Session 1
Neurons
93
192954
847
2645
104
Decay trend appears in allanimals and behavioral
paradigms

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 46/73
Cortical Contributions Belle Day 2
0 20 40
-20
0
20
40
60
Area 1
0 20 40
-20
0
20
40
60
Area 2
0 20 40
-20
0
20
40
60
Area 3
0 20 40
-20
0
20
40
60
Area 4
0 20 40
-20
0
20
40
60
Areas 12
0 20 40
-20
0
20
40
60
Areas 13
0 20 40
-20
0
20
40
60
Areas 14
0 20 40
-20
0
20
40
60
Areas 23
0 20 40
-20
0
20
40
60
Areas 24
0 20 40
-20
0
20
40
60
Areas 34
0 20 40
-20
0
20
40
60
Areas 123
0 20 40
-20
0
20
40
60
Areas 124
0 20 40
-20
0
20
40
60
Areas 134
0 20 40
-20
0
20
40
60
Areas 234
0 20 40
-20
0
20
40
60
Areas 1234
Area 1 PP
Area 2 M1
Area 3 PMd
Area 4 M1 (right)
Train 15 separate RMLPs with every combination of cortical input.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 47/73
Is there enough information in spiketrains for modeling movement?
Analysis is based on the time embedded modelCorrelation with desired is based on a linear filter output foreach neuron
Utilize a non-stationary tracking algorithmParameters are updated by LMS
Build a spatial filterAdaptive in real timeSparse structure based on regularization for enablesselection

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 48/73
Adapted by LMS Adapted by on-line LAR(Kim et. al., MLSP , 2004)
Architecture
x1(n) z-1
z-1
y1(n) w11
w1 L
/ /
x M (n) z-1
z-1
y M (n) w M 1
w ML
/ /
…
y2(n)
…
c1
c M
)(ˆ
nd c2

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 49/73
Training Algorithms
Tap weights for every time lag is updated by LMS
Then, the spatial filter coefficients are obtained by on-line version ofleast angle regression (LAR) (Efron et. al. 2004)
i=0
r = y-X = yFind argmax i |x iT r |x j
j
r = y-X = y-x j j Adjust j s.t.
k , | xk T r |=| x i
T r |
.
.
.
x1
xk
y x j
j
r = y-(x j j + xk k )
Adjust j & k s.t.q , | xq
T r |=| xk T r |=| x i
T r | k
)()(2)()1( n xnenwnw ijijij

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 50/73
Application to BMI Data – TrackingPerformance
A li i BMI D N l

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 51/73
Application to BMI Data – NeuronalSubset Selection
HandTrajectory
(z)
NeuronalChannelIndex
EarlyPart
LatePart

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 52/73
Generative Models for BMIs
Use partial information about the physiological system, normallyin the form of states.
They can be either applied to binned data or to spike trainsdirectly.
Here we will only cover the spike train implementations.
Difficulty of spike train Analysis:Spike trains are point processes , i.e. all the information is contained
in the timing of events, not in the amplitude fo the signals!

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 53/73
Build an adaptive signal processing framework forBMI decoding in the spike domain.
Features of Spike domain analysis
Binning window size is not a concernPreserve the randomness of the neuron behavior. Provide more understanding of neuron physiology (tuning) andinteractions at the cell assembly levelInfer kinematics onlineDeal with nonstationary
More computation with millisecond time resolution
Goal

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 54/73
Recursive Bayesian Approach
),~
(~
t t n X H Z t t
State Time-seriesmodel cont. observ.
Prediction),(
~11 t t t t v X F X
Updating
t Z
P(state|observation)

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 55/73
Recursive Bayesian approach
State space representation
First equation ( system model ) defines a first order Markov process.Second equation ( observation model ) defines the likelihood of the
observations p(z t|x t) . The problem is completely defined by theprior distribution p(x 0).
Although the posterior distribution p(x 0:t |u 1:t,z 1:t) constitutes thecomplete solution, the filtering density p(x
t|u
1:t, z
1:t) is normally
used for on-line problems.The general solution methodology is to integrate over the unknown
variables (marginalization).
t t t t t
t t t
n xuh z
v x f x
),(
)(1
h

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 56/73
Recursive Bayesian approach
There are two stages to update the filtering density:Prediction (Chapman Kolmogorov)
System model p(x t|x t-1) propagates into the future the posterior density
Update
Uses Bayes rule to update the filtering density. The following equationsare needed in the solution.
11:11:1111:11:1 ),|()|(),|( t t t t t t t t t dx zu x p x x p zu x p
),|(),|(),|(
),|(1:1
1:11:1:1:1
t t t
t t t t t t t t t zuu p
z x x pu x z p zu x p
1111111111 )()()|(),|()|( t t t t t t t t t t t t t dvv p xv xdv xv p xv x p x x p
t t t t t t t t t dnn pn xuh zu x z p )()),((),|(
t t t t t t t t t t dxu z x pu x z pu z z p ),|(),|(),|( 1:11:11:1

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 57/73
State estimation framework for BMI decoding
Tuning function
Kinematics
state
Neural Tuning
functionMulti-spike trains
observation
xk k-1xk F k-1v= ( ),
k x
k z
k H
k n= )( ,
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 105
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time
s p
i k e
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
5
-1.5
-1
-0.5
0
0.5
1
1.5
time(ms)
v e
l o c
i t y
Decoding
Kinematic dynamic model
Key Idea : work with the probability of spike firing which is a
continuous random variable

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 58/73
Kalman filter for BMI decoding
KinematicState
Neuron tuningfunction Firing rate
ContinuousObservation
P(state|observation)Prediction
Updating
Gaussian
Linea
r
Linear
[Wu et al. 2006]
For Gaussian noises and linear prediction and observation models, thereis an analytic solution called the Kalman Filter.
Particle Filter for BMI decoding

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 59/73
Particle Filter for BMI decoding
KinematicState
Neuron tuningfunction Firing rate
ContinuousObservation
P(state|observation)Prediction
Updating
nonGaussianLinear
Exponential
[Brockwell et al. 2004]
In general the integrals need to be approximated by sums using
Monte Carlo integration with a set of samples drawn from theposterior distribution of the model parameters.

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 60/73
Step 2- Tuning Function Estimation
Neural firing Model
Assumption :
generation of the spikes depends only on the kinematic
vector we choose.
Linearfilter
nonlinear f Poissonmodel
velocity spikes
)( t t vk f
)( t t Poissonspike

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 61/73
Step 2- Linear Filter Estimation
Spike Triggered Average (STA)
Geometry interpretation][)][(
|1 v E I vv E k
spikev
T
-30 -20 -10 0 10 20 30-25
-20
-15
-10
-5
0
5
10
15
20
25
1st Principal Component
2 n d P r i n c
i p a
l C o m p o n e n
t
neuron 72: VpS PCA
VpVpS
1st Princi al com onent
2n
d P r i n
c i p
al c
om p on
en
t

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 62/73
Step 2- Nonlinear f estimation
Step 2- Diversity of neural nonlinear properties

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 63/73
Step 2- Diversity of neural nonlinear properties
Ref: Paradoxical cold
[Hensel et al. 1959]
Step 2- Estimated firing probability and

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 64/73
p g p ygenerated spikes
Step 3: Sequential Estimation Algorithm for

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 65/73
Step 3: Sequential Estimation Algorithm forPoint Process Filtering
Consider the neuron as an inhomogenous Poisson point process
Observing N(t) spikes in an interval T, the posterior of the spikemodel is
The probability of observing an event in t is
And the one step prediction density (Chapman-Kolmogorov)
The posterior of the state vector, given an observation N
}exp{)( k k k vk t
t t t t t N t t N
t t t t t
))(),(),(|1)()(Pr(lim))(),(),(|(
0
HθxHθx
)),|(exp()),|((),|( t t t t N P k k k N
k k k k k k k HxHxHx
)|()|(),|(
),|(k k
k k k k k k k k N p
p N P N p
HHxHx
Hx
11111 ),|(),|()|( k k k k k k k k k d N p p p xHxHxxHx
Step 3: Sequential Estimation Algorithm forS
N i
ik
ik w 1:0 },{x S
N i
ik
ik w 1:0 },{x S
N i
ik
ik w 1:0 },{x S
N i
ik
ik w 1:0 },{x

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 66/73
p q gPoint Process Filtering
Monte Carlo Methods are used to estimate the integral. Letrepresent a random measure on the posterior density, and represent
the proposed density by
The posterior density can then be approximated by
Generating samples from using the principle of Importance
sampling
By MLE we can find the maximum or use direct estimation with kernels
of mean and variance
)|( :1:0 k k N q x
N
i
i t t it t t x xk w N x p1
:0:0:1:0 ),()|(
S N
iik
ik w 1:0 },{x
),|()|()|(
)|()|(
1
11
:1:0
:1:0
k ik
ik
ik
ik
ik k i
k k
ik
k i
k ik N q
p N pw
N q N p
wxx
xxxxx
S N
i
ik
ik k k N p
1
~)|( xxx ))()(()|(
~
1
~T
k ik
N
i
k ik
ik k k
S
N pV xxxxx
)|( :1:0 k k N q x

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 67/73
Posterior density at a time index
-2.5 -2 -1.5 -1 -0.5 0 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
velocity
p r o
b a
b i l i t y
pdf at time index 45.092s
posterior density
desired velocityvelocity by seq. estimation (collapse)velocity by seq. estimation (MLE)velocity by adaptive filtering

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 68/73
Step 3: Causality concerns
0 0. 2 0. 4 0. 6 0. 8 1 1. 2 1. 4 1. 6 1. 8 2
x 105
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time
s p
i k e
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
5
-1.5
-1
-0.5
0
0.5
1
1.5
time ms
v e
l o c
i t y
1,02);( )
)())(|(
(log))(|())(()(spike X
KX spike spike plagKX spike p
lagKX spike plagKX plag I
lag
S 3 I f i E i d D l
8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 69/73
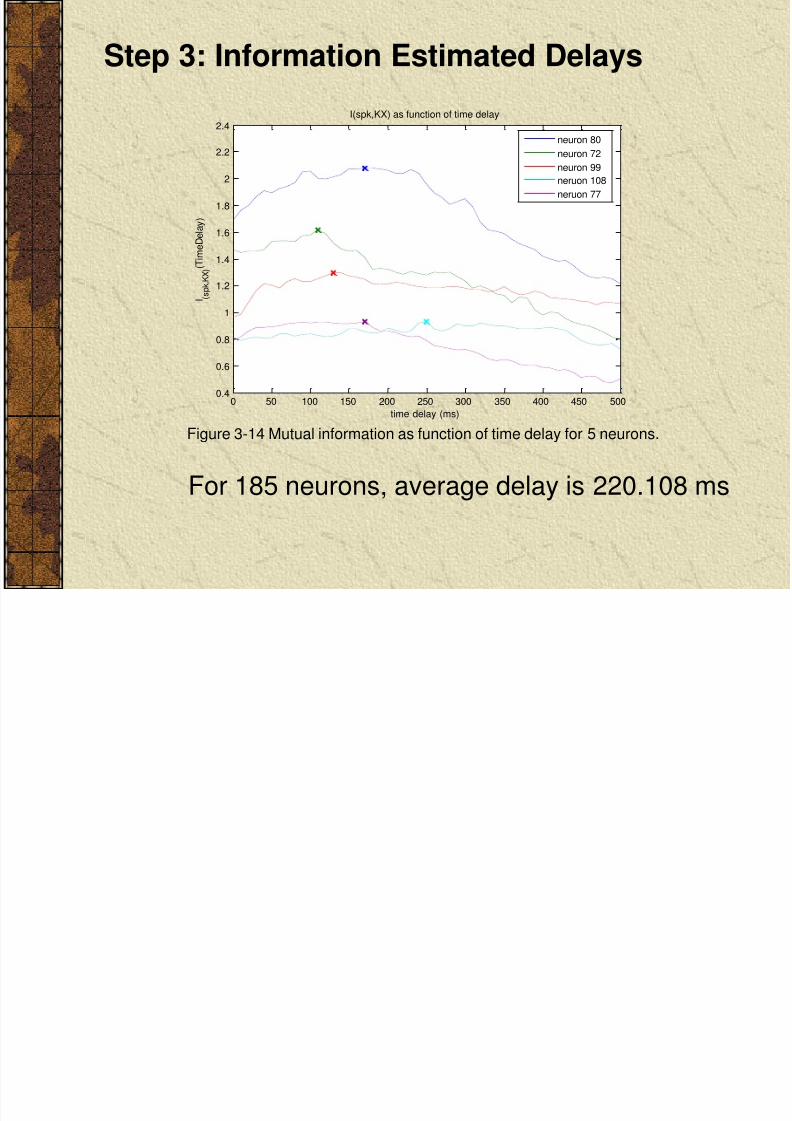
For 185 neurons, average delay is 220.108 ms
0 50 100 150 200 250 300 350 400 450 5000.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
time delay (ms)
I ( s p k , K
X ) ( T
i m e
D e
l a y
)
I(spk,KX) as function of time delay
neuron 80neuron 72neuron 99neruon 108neruon 77
Figure 3-14 Mutual information as function of time delay for 5 neurons.
Step 3: Information Estimated Delays
Step 4:

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 70/73
Step 4:Monte Carlo sequential kinematics estimation
)(i
it t
X k f
KinematicState
Neural Tuningfunction spike trains
Prediction
it
it t
it v X F X 11
Updating
)|( )(1
it
jt
it
it N pww
)( j
t N
NonGaussian
P(state|observation) N
i
it t
it
jt t x xk w N x p
1:0:0
)(:1:0 )()|(
N
i
ik k
ik k k k W N p
1:1 )()|( xxx
Reconstruct the kinematics from neuron spike

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 71/73
trains
650 700 750 800-30
-20
-10
0
10
t
Px
650 700 750 800-40
-20
0
20
40
t
Py
650 700 750 800-2
-1
0
1
t
Vx
650 700 750 800-2
0
2
t
Vy
650 700 750 800-0.1
0
0.1
0.2
0.3
t
Ax
650 700 750 800-0.1
0
0.1
0.2
0.3
t
Ay
desiredcc exp =0.7002
cc MLE=0.69188
desiredcc exp =0.015071
cc MLE=0.040027
desiredcc exp =0.91319
cc MLE=0.91162
desiredcc exp =0.81539
cc MLE=0.8151
desiredcc exp =0.97445
cc MLE=0.95376
es recc exp =0.80243
cc MLE=0.67264
R lt i

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 72/73
Table 3-2 Correlation Coefficients between the Desired Kinematics and theReconstructions
CCPosition Velocity Acceleration
x y x y x y
Expectation 0.8161 0.8730 0.7856 0.8133 0.5066 0.4851
MLE 0.7750 0.8512 0.7707 0.7901 0.4795 0.4775
Table 3-3 Correlation Coefficient Evaluated by the Sliding Window
CC
Position Velocity Acceleration
x y x y x y
Expectation0.840100.0738
0.89450.0477
0.79440.0578
0.81420.0658
0.52560.0658
0.44600.1495
MLE 0.79840.0963 0.87210.0675 0.78050.0491 0.79180.0710 0.49500.0430 0.44710.1399
Results comparison
[Sanchez, 2004]

8/3/2019 Survey Bmis 2011
http://slidepdf.com/reader/full/survey-bmis-2011 73/73
Conclusion
Our results and those from other laboratories show it is possible toextract intent of movement for trajectories from multielectrode arraydata.The current results are very promising, but the setups have limiteddifficulty, and the performance seems to have reached a ceiling at anuncomfortable CC < 0.9Recently, spike based methods are being developed in the hope ofimproving performance. But difficulties in these models are many.Experimental paradigms to move the field from the present level needto address issues of:
Training (no desired response in paraplegic)How to cope with coarse sampling of the neural populationHow to include more neurophysiology knowledge in the design


















