State Machine Signaling - University of California, Berkeleycs150/fa05/Lectures/22... · State...
16
CS 150 - Spring 2004 – Lec #22 – Signaling - 1 State Machine Signaling Timing Behavior Glitches/hazards and how to avoid them FSM Partitioning What to do when the state machine doesn’t fit! State Machine Signaling Introducing Idle States (synchronous model) Four Cycle Signaling (asynchronous model) Dealing with Asynchronous Inputs Metastability and synchronization CS 150 - Spring 2004 – Lec #22 – Signaling - 2 Midterm #1 Results Midterm 1 0 5 10 15 20 25 38 39 40 41 42 43 44 45 46 47 48 49 50 Score Number Mean
Transcript of State Machine Signaling - University of California, Berkeleycs150/fa05/Lectures/22... · State...
CS 150 - Spring 2004 – Lec #22 – Signaling - 1
State Machine Signaling Timing Behavior
Glitches/hazards and how to avoid them
FSM Partitioning What to do when the state machine doesn’t fit!
State Machine Signaling Introducing Idle States (synchronous model) Four Cycle Signaling (asynchronous model)
Dealing with Asynchronous Inputs Metastability and synchronization
CS 150 - Spring 2004 – Lec #22 – Signaling - 2
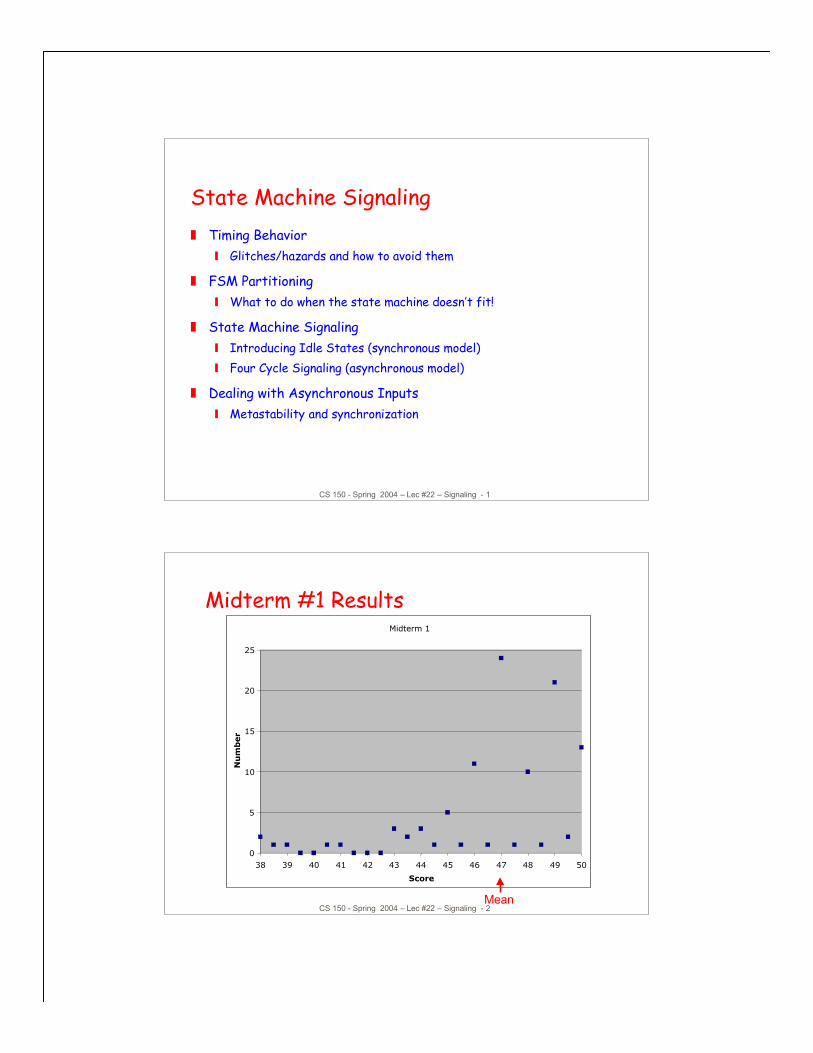
Midterm #1 ResultsMidterm 1
0
5
10
15
20
25
38 39 40 41 42 43 44 45 46 47 48 49 50
Score
Number
Mean
CS 150 - Spring 2004 – Lec #22 – Signaling - 3
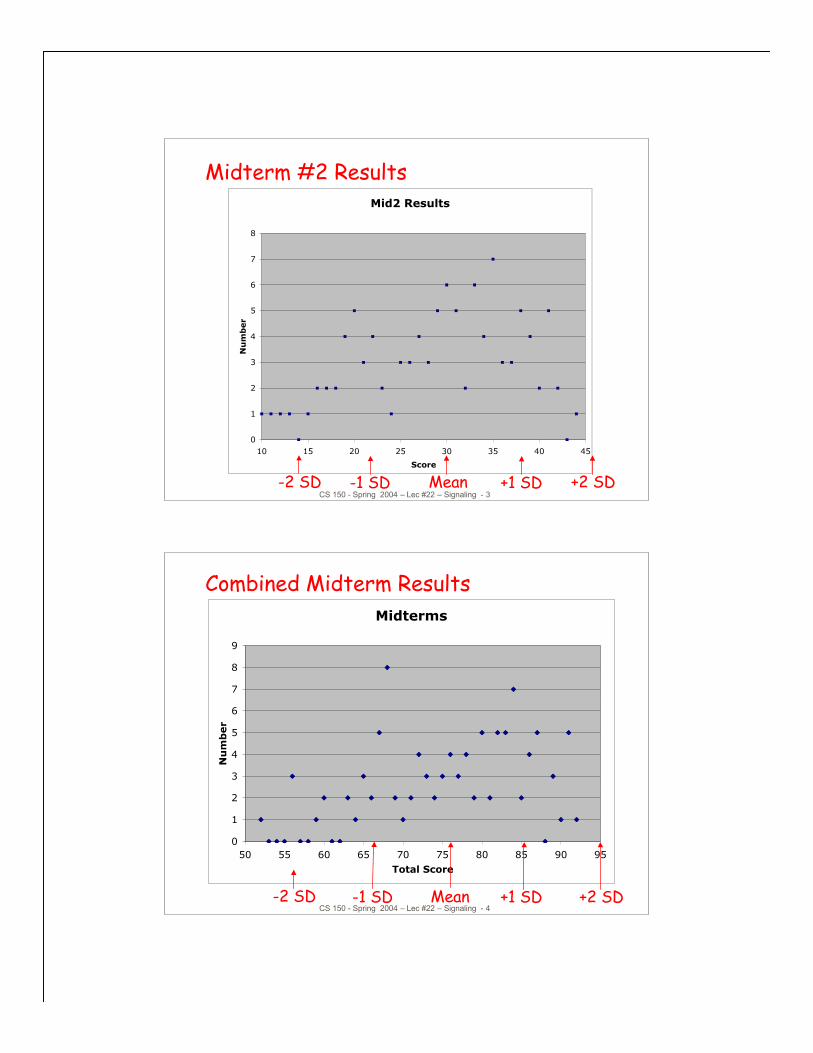
Midterm #2 ResultsMid2 Results
0
1
2
3
4
5
6
7
8
10 15 20 25 30 35 40 45
Score
Nu
mb
er
Mean +1 SD-1 SD-2 SD +2 SD
CS 150 - Spring 2004 – Lec #22 – Signaling - 4
Combined Midterm ResultsMidterms
0
1
2
3
4
5
6
7
8
9
50 55 60 65 70 75 80 85 90 95
Total Score
Nu
mb
er
Mean +1 SD-1 SD-2 SD +2 SD

CS 150 - Spring 2004 – Lec #22 – Signaling - 5
F is not always 0pulse 3 gate-delays wide
D remains high forthree gate delays after
A changes from low to high
FA B C D
Momentary Changes in Outputs Can be useful—pulse shaping circuits
Can be a problem—incorrect circuitoperation (glitches/hazards)
Example: pulse shaping circuit A' • A = 0 delays matter
in function
CS 150 - Spring 2004 – Lec #22 – Signaling - 6
initially undefined
close switch
open switch
+
open switch
resistor
A B
CD
Oscillatory Behavior
Another pulse shaping circuit

CS 150 - Spring 2004 – Lec #22 – Signaling - 7
Hazards/Glitches Hazards/glitches: unwanted switching at the outputs
Occur when different paths through circuit have differentpropagation delays As in pulse shaping circuits we just analyzed
Dangerous if logic causes an action while output is unstable May need to guarantee absence of glitches
Usual solutions1) Wait until signals are stable (by using a clock): preferable
(easiest to design when there is a clock – synchronous design)2) Design hazard-free circuits: sometimes necessary (clock not used
– asynchronous design)
CS 150 - Spring 2004 – Lec #22 – Signaling - 8
10 0
1 10 0
1 10 0
01 1
Types of Hazards Static 1-hazard
Input change causes output to go from 1 to 0 to 1
Static 0-hazard Input change causes output to go from 0 to 1 to 0
Dynamic hazards Input change causes a double change
from 0 to 1 to 0 to 1 OR from 1 to 0 to 1 to 0
CS 150 - Spring 2004 – Lec #22 – Signaling - 9
F
static-0 hazard static-1 hazard
A
B
S
S'
F
hazard
AS
B
S'
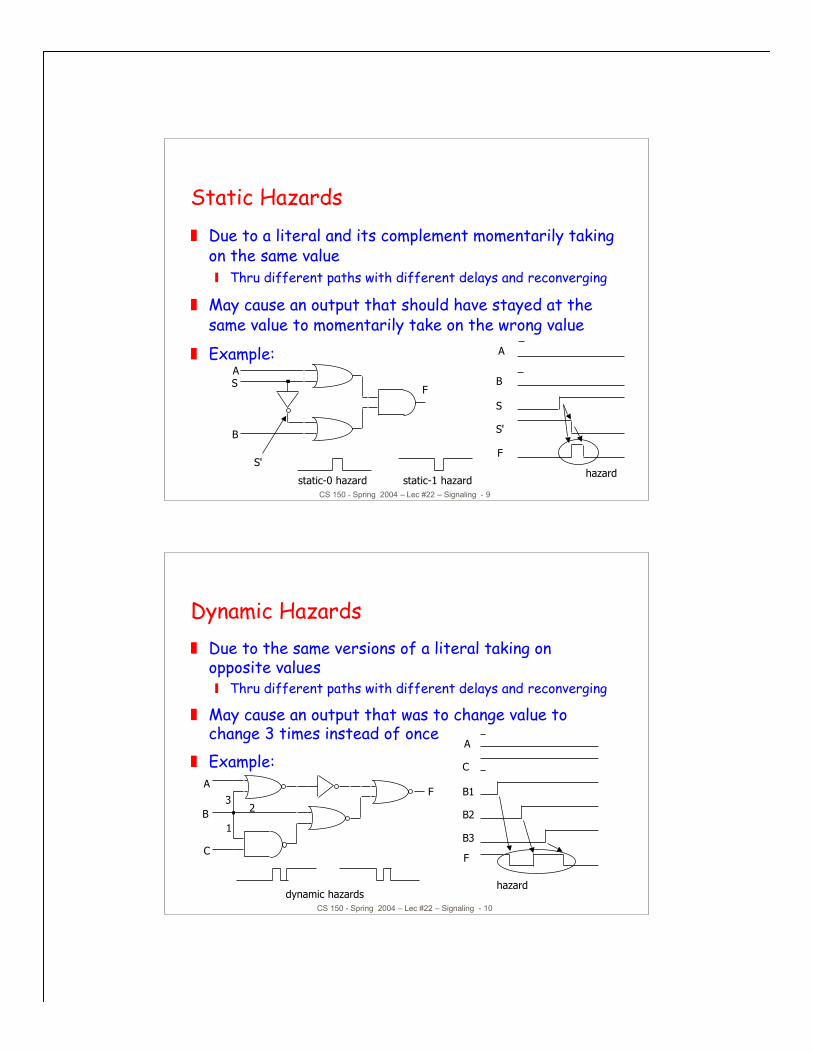
Static Hazards Due to a literal and its complement momentarily taking
on the same value Thru different paths with different delays and reconverging
May cause an output that should have stayed at thesame value to momentarily take on the wrong value
Example:
CS 150 - Spring 2004 – Lec #22 – Signaling - 10
B2
A
C
B1
F
hazarddynamic hazards
B3
A
C
B
F
1
23
Dynamic Hazards Due to the same versions of a literal taking on
opposite values Thru different paths with different delays and reconverging
May cause an output that was to change value tochange 3 times instead of once
Example:
CS 150 - Spring 2004 – Lec #22 – Signaling - 11
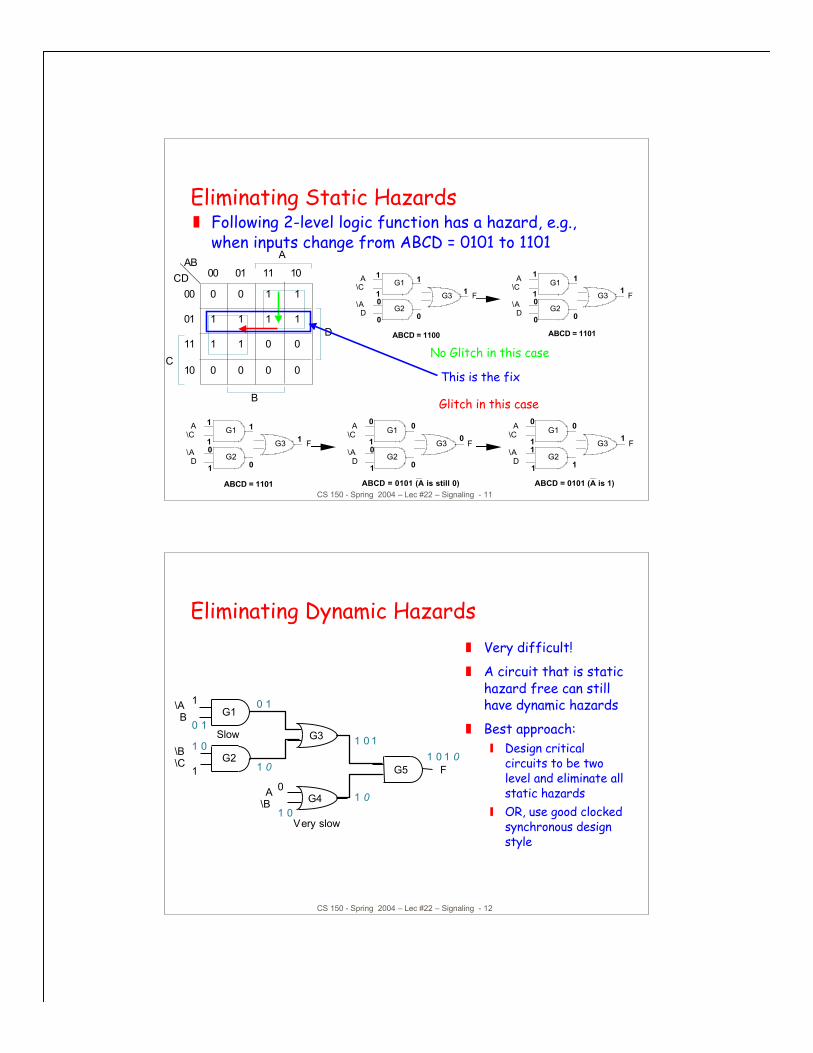
Eliminating Static Hazards Following 2-level logic function has a hazard, e.g.,
when inputs change from ABCD = 0101 to 1101A
AB 00 01 11 10
0 0 1 1
1 1 1 1
1 1 0 0
0 0 0 0
00
01
11
10 C
CD
D
B
G1
G2
G3
A\C
\AD
F
G1
G2
G3
A\C
\AD
F
1
1
11
0
0
0
1
1
11
0
0
0
ABCD = 1100 ABCD = 1101
No Glitch in this case
G1
G2
G3
A\C
\AD
F
G1
G2
G3
A\C
\AD
F
0
1
00
1
0
0
1
1
11
1
0
0
ABCD = 1101 ABCD = 0101 (A is still 0)
G1
G2
G3
A\C
\AD
F
0
1
01
1
1
1
ABCD = 0101 (A is 1)
Glitch in this case
This is the fix
CS 150 - Spring 2004 – Lec #22 – Signaling - 12
Eliminating Dynamic Hazards Very difficult!
A circuit that is statichazard free can stillhave dynamic hazards
Best approach: Design critical
circuits to be twolevel and eliminate allstatic hazards
OR, use good clockedsynchronous designstyle
G1
G2
G3
G5
G4
\A B
\B
\B \C F
A
0 1
1
1 0
1
0 1
1 0
1 0 1
1 0 0
1 0
1 0 1 0
Slow
V ery slow

CS 150 - Spring 2004 – Lec #22 – Signaling - 13
FSM Partitioning Why Partition?
What if programmable logic is limited in number of inputs andoutputs that can be used in a particular device?
For PLAs, the number of product terms are limited, thus limiting thecomplexity of the next state and output functions
CS 150 - Spring 2004 – Lec #22 – Signaling - 14
Partitioning the State Machine Suppose that FSM is
partitioned so that states atthe right are in one partitionand states at the left are inthe other
How do you supportintersignaling between thestate machine partitions?
It is usually a good idea topartition the machine so thereare as few cross links aspossible (min cut set in graphtheoretic terms)
CS 150 - Spring 2004 – Lec #22 – Signaling - 15
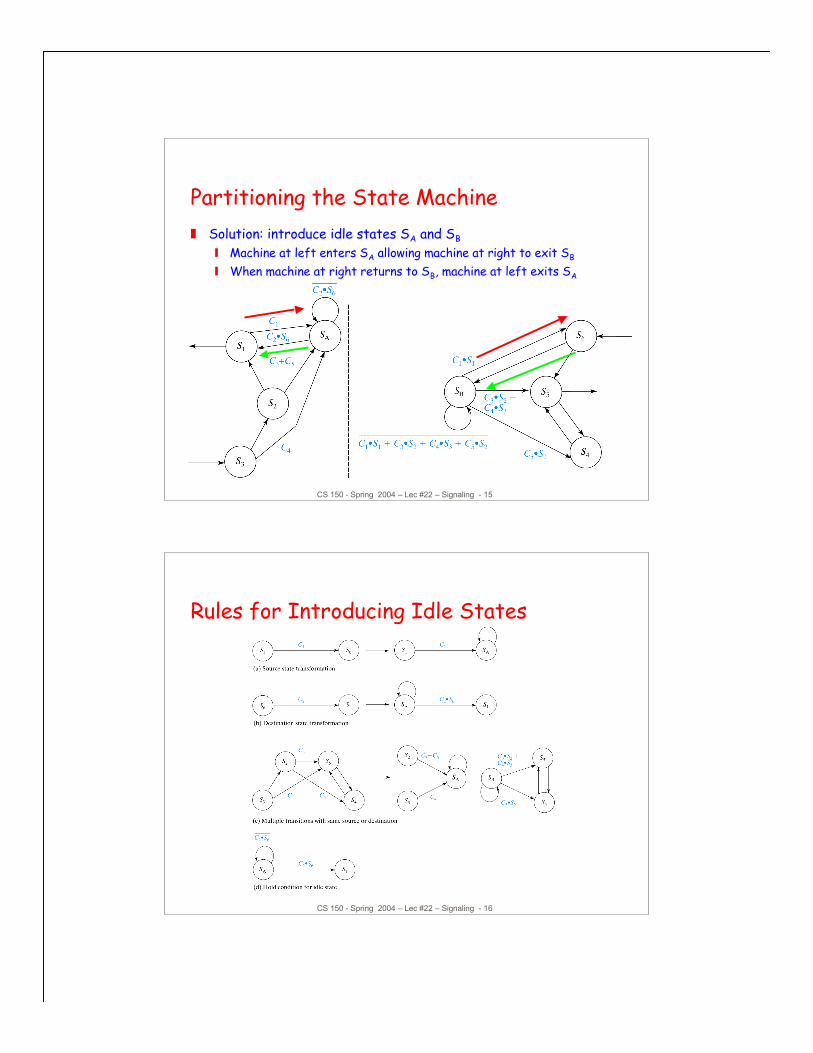
Partitioning the State Machine Solution: introduce idle states SA and SB
Machine at left enters SA allowing machine at right to exit SB
When machine at right returns to SB, machine at left exits SA
CS 150 - Spring 2004 – Lec #22 – Signaling - 16
Rules for Introducing Idle States
CS 150 - Spring 2004 – Lec #22 – Signaling - 17
Example: Partitioning the Up/DownCounter
CS 150 - Spring 2004 – Lec #22 – Signaling - 18
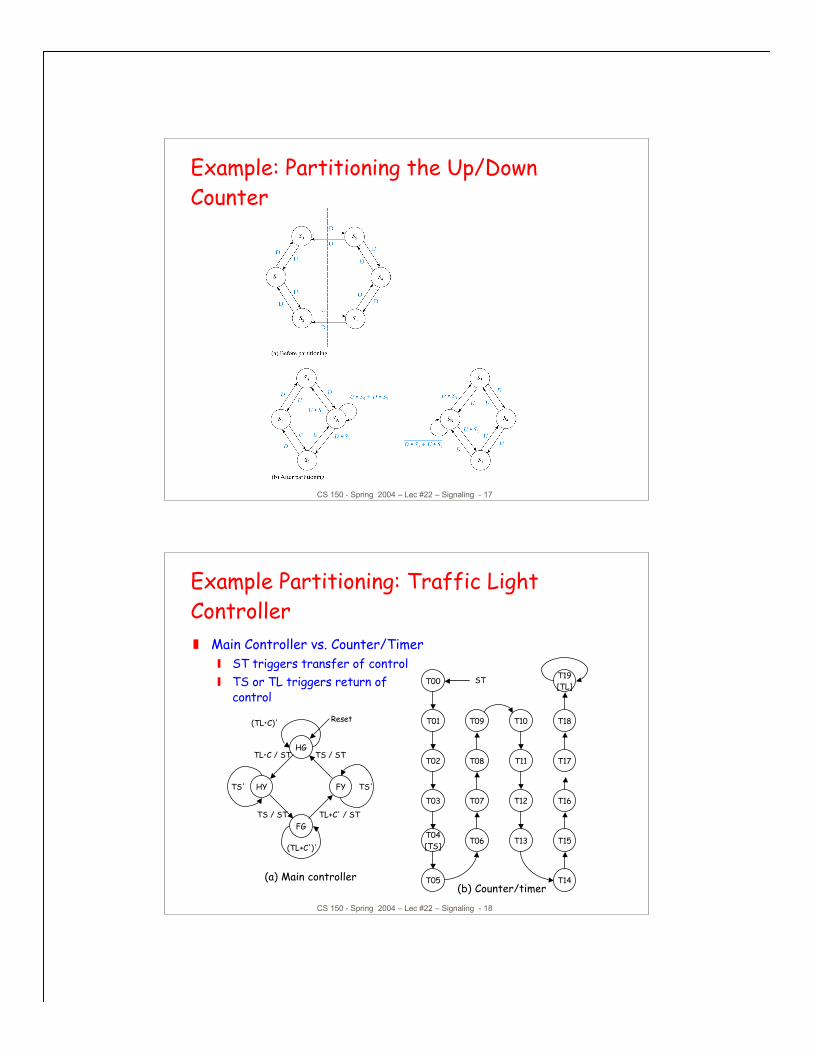
Example Partitioning: Traffic LightController Main Controller vs. Counter/Timer
ST triggers transfer of control TS or TL triggers return of
controlReset
TS'
TS / ST
(TL•C)'
TL•C / ST
TS'
TS / ST
(TL+C')'
TL+C' / ST
HG
FG
FYHY
T00
T01
T02
T03
T04[TS]
T05
T09
T08
T07
T06
T10
T11
T12
T13
T19[TL]
T18
T17
T16
T15
T14
ST
(a) Main controller(b) Counter/timer
CS 150 - Spring 2004 – Lec #22 – Signaling - 19
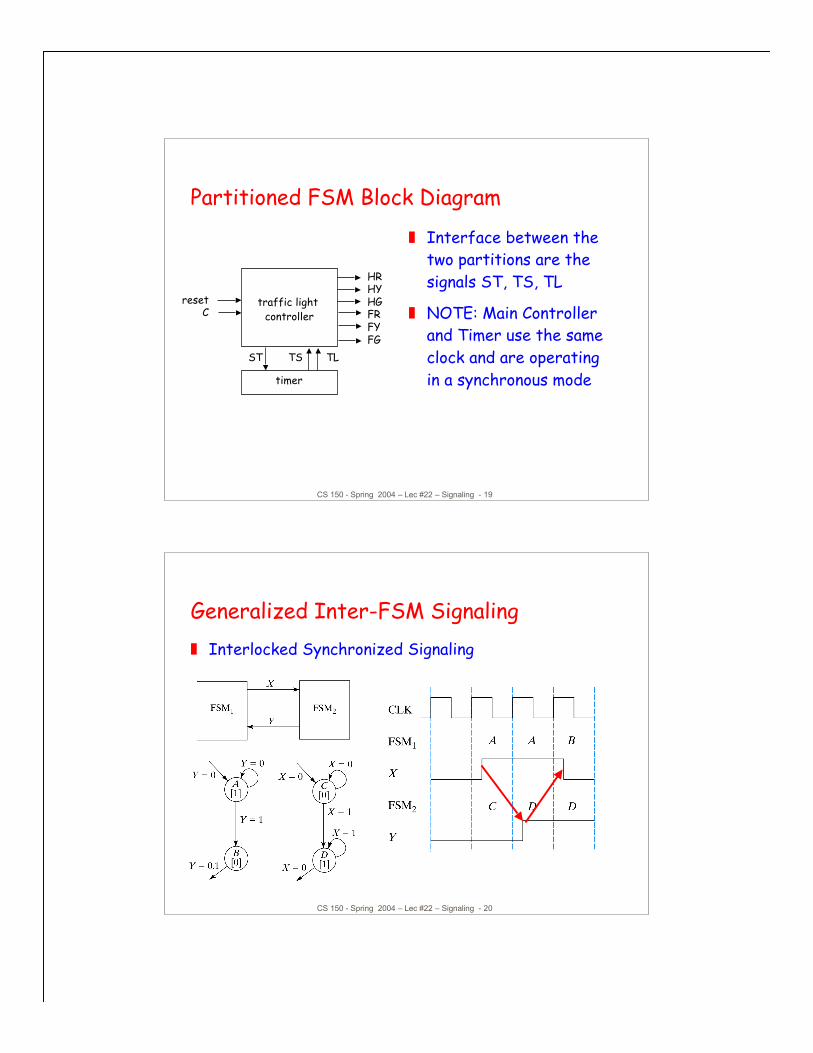
Partitioned FSM Block Diagram
Interface between thetwo partitions are thesignals ST, TS, TL
NOTE: Main Controllerand Timer use the sameclock and are operatingin a synchronous mode
traffic light controller
timer
TLTSST
resetC
HRHYHGFRFYFG
CS 150 - Spring 2004 – Lec #22 – Signaling - 20
Generalized Inter-FSM Signaling Interlocked Synchronized Signaling
CS 150 - Spring 2004 – Lec #22 – Signaling - 21
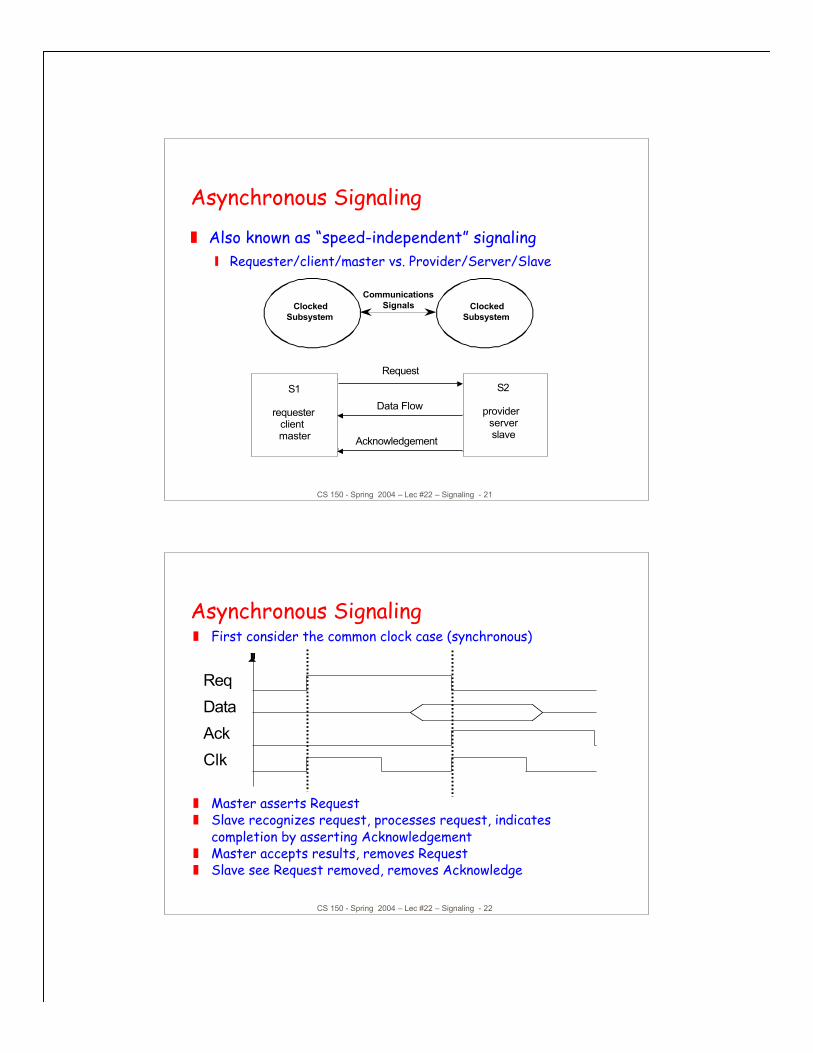
Asynchronous Signaling
Also known as “speed-independent” signaling Requester/client/master vs. Provider/Server/Slave
Communications Signals Clocked
SubsystemClocked
Subsystem
S1
requester client master
S2
provider server slave
Request
Data Flow
Acknowledgement
CS 150 - Spring 2004 – Lec #22 – Signaling - 22
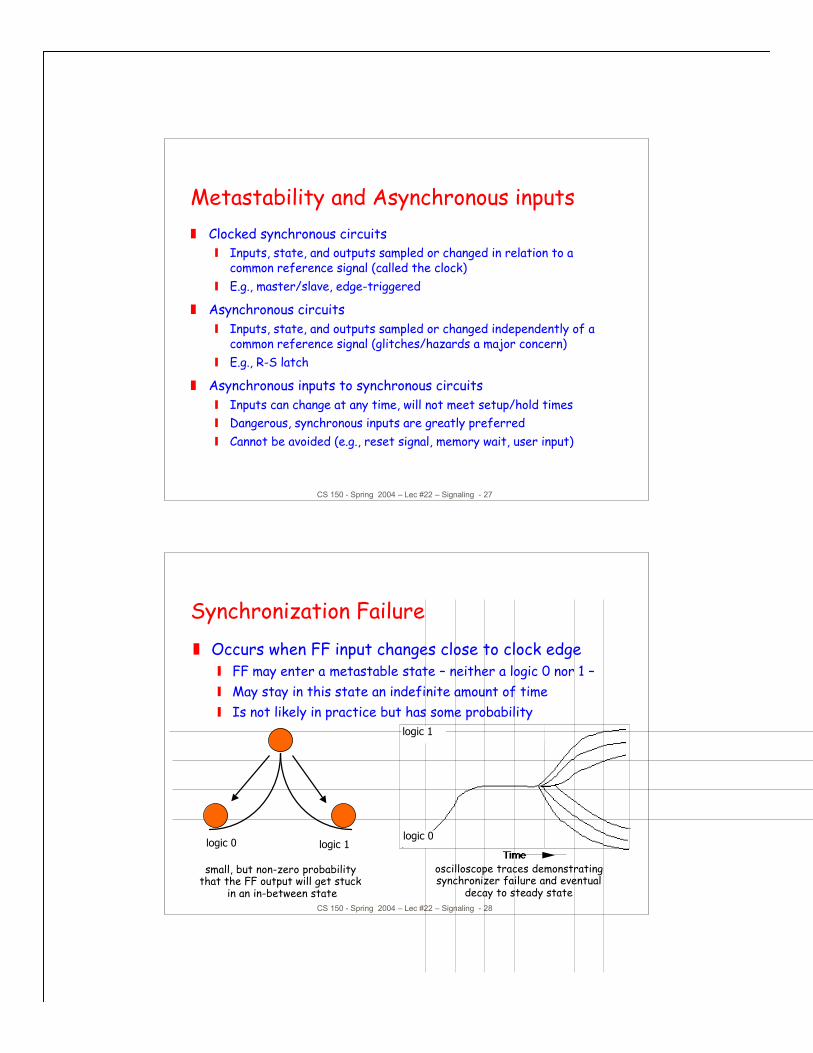
Asynchronous Signaling First consider the common clock case (synchronous)
Master asserts Request Slave recognizes request, processes request, indicates
completion by asserting Acknowledgement Master accepts results, removes Request Slave see Request removed, removes Acknowledge
Req Data Ack Clk

CS 150 - Spring 2004 – Lec #22 – Signaling - 23
Asynchronous Signaling What if Slave can’t respond in single cycle? Solution: Wait
signaling
Slave inhibits master by asserting wait
When slave unasserts wait, master knows request has beenprocessed, and can latch results
Req Data W ait
Clk
CS 150 - Spring 2004 – Lec #22 – Signaling - 24
Req
Data Ack
True Asynchronous Signaling Now remove the assumption of a single common clock
How do we make sure that receiver has seen the sender’s signal?Solution: Interlocked signaling
Four cycle signaling: assert Req, process request, assert ack,latch result, remove Req, remove Ack and start again
Sometimes called “Return to Zero” signaling
1
2
3
4

CS 150 - Spring 2004 – Lec #22 – Signaling - 25
True Asynchronous Signaling
Alternative scheme: Two-Cycle Signaling Non-return-to-zero signaling Transaction start by Req lo-to-hi, finishes Ack lo-to-hi Next transaction starts by Req hi-to-lo, finishes Ack hi-to-lo Requires EXTRA state to keep track of the current sense of
the transitions—faster than 4 cycle case, but usually involvesmore hardware
Ack
Data Req 1
2
1
2
CS 150 - Spring 2004 – Lec #22 – Signaling - 26
True Asynchronous Timing Self-Timed Circuits
Uses Req/Ack signaling as described Components can be constructed with
NO internal clocks Determines on its own when the
request has been processed Concept of the delay line simply
slows down the pass through of theReq to the Ack—usually matched tothe worst case delay path
Becoming MORE important for largescale VLSI chips were global clockdistribution is a challenge
Input
Req
Output
Ack
Combinational logic
Delay
CS 150 - Spring 2004 – Lec #22 – Signaling - 27
Metastability and Asynchronous inputs Clocked synchronous circuits
Inputs, state, and outputs sampled or changed in relation to acommon reference signal (called the clock)
E.g., master/slave, edge-triggered
Asynchronous circuits Inputs, state, and outputs sampled or changed independently of a
common reference signal (glitches/hazards a major concern) E.g., R-S latch
Asynchronous inputs to synchronous circuits Inputs can change at any time, will not meet setup/hold times Dangerous, synchronous inputs are greatly preferred Cannot be avoided (e.g., reset signal, memory wait, user input)
CS 150 - Spring 2004 – Lec #22 – Signaling - 28
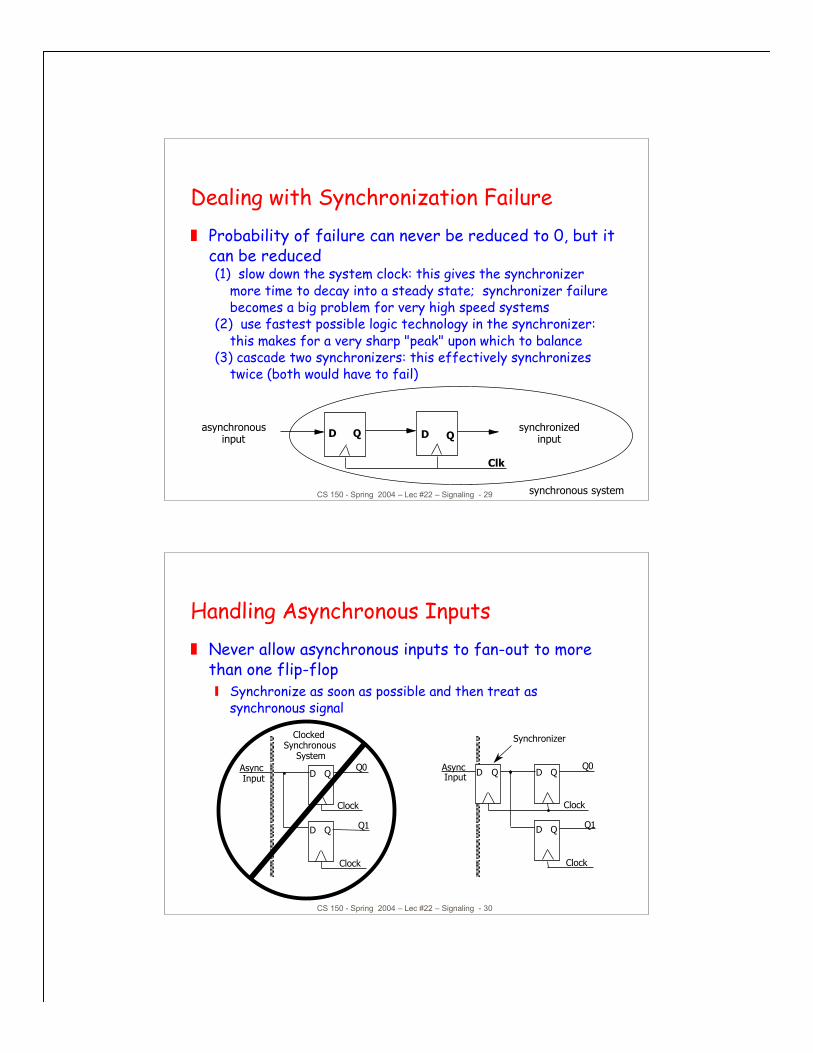
small, but non-zero probability that the FF output will get stuck
in an in-between state
oscilloscope traces demonstratingsynchronizer failure and eventual
decay to steady state
logic 0 logic 1logic 0
logic 1
Synchronization Failure Occurs when FF input changes close to clock edge
FF may enter a metastable state – neither a logic 0 nor 1 – May stay in this state an indefinite amount of time Is not likely in practice but has some probability
CS 150 - Spring 2004 – Lec #22 – Signaling - 29
D DQ Qasynchronous
inputsynchronized
input
synchronous system
Clk
Dealing with Synchronization Failure Probability of failure can never be reduced to 0, but it
can be reduced(1) slow down the system clock: this gives the synchronizer
more time to decay into a steady state; synchronizer failurebecomes a big problem for very high speed systems
(2) use fastest possible logic technology in the synchronizer:this makes for a very sharp "peak" upon which to balance
(3) cascade two synchronizers: this effectively synchronizestwice (both would have to fail)
CS 150 - Spring 2004 – Lec #22 – Signaling - 30
D Q
D Q
Q0
Clock
Clock
Q1
Async Input
D Q
D Q
Q0
Clock
Clock
Q1
Async Input D Q
Clocked Synchronous
System
Synchronizer
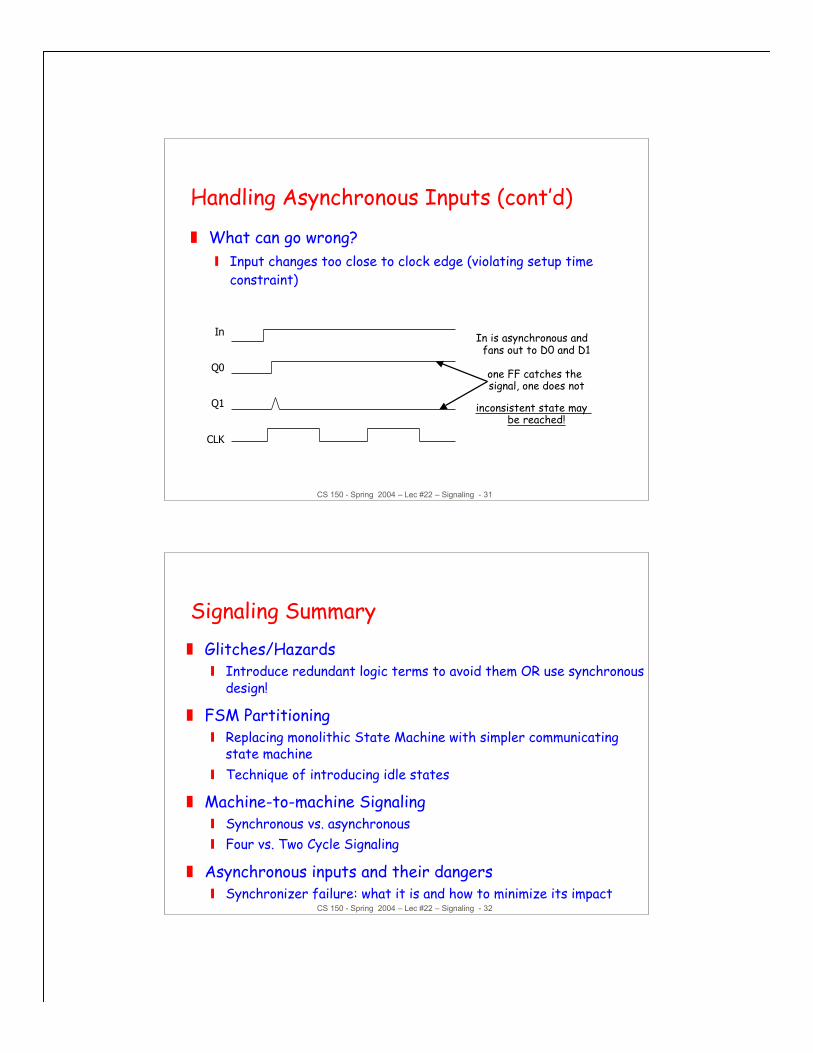
Handling Asynchronous Inputs Never allow asynchronous inputs to fan-out to more
than one flip-flop Synchronize as soon as possible and then treat as
synchronous signal
CS 150 - Spring 2004 – Lec #22 – Signaling - 31
In is asynchronous and fans out to D0 and D1
one FF catches the signal, one does not
inconsistent state may be reached!
In
Q0
Q1
CLK
Handling Asynchronous Inputs (cont’d)
What can go wrong? Input changes too close to clock edge (violating setup time
constraint)
CS 150 - Spring 2004 – Lec #22 – Signaling - 32
Signaling Summary Glitches/Hazards
Introduce redundant logic terms to avoid them OR use synchronousdesign!
FSM Partitioning Replacing monolithic State Machine with simpler communicating
state machine Technique of introducing idle states
Machine-to-machine Signaling Synchronous vs. asynchronous Four vs. Two Cycle Signaling
Asynchronous inputs and their dangers Synchronizer failure: what it is and how to minimize its impact