Stabilization and Optimality Results

of 9
-
date post
05-Apr-2018 -
Category
Documents
-
view
225 -
download
0
Transcript of Stabilization and Optimality Results
-
7/31/2019 Stabilization and Optimality Results
1/9
J o u r n a l o f G u i d a n c e , C o n t r o l , a n d D y n a m i c s
V o l . 1 9 , N o . 4 , J u l y - A u g u t s 1 9 9 6
S t a b i l i z a t i o n a n d O p t i m a l i t y R e s u l t s
f o r t h e A t t i t u d e C o n t r o l P r o b l e m
P a n a g i o t i s T s i o t r a s
U n i v e r s i t y o f V i r g i n i a , C h a r l o t t e s v i l l e , V A 2 2 9 0 3 - 2 4 4 2
A b s t r a c t
I n t h i s p a p e r w e p r e s e n t s o m e r e c e n t r e s u l t s o n t h e d e s c r i p t i o n a n d c o n t r o l o f t h e a t t i t u d e m o t i o n o f r o t a t i n g
r i g i d b o d i e s . W e d e r i v e a n e w c l a s s o f g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z i n g f e e d b a c k c o n t r o l l a w s f o r t h e c o m p l e t e ( i . e . ,
d y n a m i c s a n d k i n e m a t i c s ) a t t i t u d e m o t i o n . W e s h o w t h a t t h e u s e o f a L y a p u n o v f u n c t i o n w h i c h i n v o l v e s t h e s u m o f
a q u a d r a t i c t e r m i n t h e a n g u l a r v e l o c i t i e s a n d a l o g a r i t h m i c t e r m i n t h e k i n e m a t i c p a r a m e t e r s l e a d s t o t h e d e s i g n o f
l i n e a r c o n t r o l l e r s . W e a l s o s h o w t h a t t h e f e e d b a c k c o n t r o l l a w s f o r t h e k i n e m a t i c s m i n i m i z e a q u a d r a t i c c o s t i n t h e
s t a t e a n d c o n t r o l v a r i a b l e s f o r a l l i n i t i a l c o n d i t i o n s . F o r t h e c o m p l e t e s y s t e m w e c o n s t r u c t a f a m i l y o f e x p o n e n t i a l l y
s t a b i l i z i n g c o n t r o l l a w s a n d w e i n v e s t i g a t e t h e i r o p t i m a l i t y c h a r a c t e r i s t i c s . T h e p r o p o s e d c o n t r o l l a w s a r e g i v e n i n
t e r m s o f t h e c l a s s i c a l C a y l e y - R o d r i g u e s p a r a m e t e r s a n d t h e M o d i e d R o d r i g u e s p a r a m e t e r s .
N o m e n c l a t u r e
e = P r i n c i p a l a x i s o f r o t a t i o n
I = i d e n t i t y m a t r i x
J = i n e r t i a m a t r i x
q = E u l e r p a r a m e t e r v e c t o r ( q
0
q
1
q
2
q
3
)
T
I R = s e t o f r e a l n u m b e r s
I R
n
= n ; d i m e n s i o n a l s p a c e o f r e a l v e c t o r s
I R
+
= s e t o f n o n n e g a t i v e r e a l n u m b e r s
S ( ) = s k e w ; s y m m e t r i c 3 3 m a t r i x
S O ( 3 ) = s p e c i a l o r t h o g o n a l g r o u p ( r o t a t i o n g r o u p )
u = t o r q u e v e c t o r i n b o d y ; a x e s ( u
1
u
2
u
3
)
T
@ V = @ x = g r a d i e n t o f a f u n c t i o n V I R
n
! I R
@ V = @ x
1
@ V = @ x
2
: : : @ V = @ x
n
= C a y l e y ; R o d r i g u e s p a r a m e t e r s (
1
2
3
)
T
= m o d i e d R o d r i g u e s p a r a m e t e r s (
1
2
3
)
T
= P r i n c i p a l a n g l e o f r o t a t i o n
! = a n g u l a r v e l o c i t y v e c t o r i n b o d y a x e s ( !
1
!
2
!
3
)
T
( )
T
= t r a n s p o s e o p e r a t o r
j j j j = 2 ; n o r m o f v e c t o r s i e k x k
2
= x
T
x
I n t r o d u c t i o n
I n r e c e n t y e a r s c o n s i d e r a b l e e o r t h a s b e e n d e v o t e d t o
t h e d e s i g n o f c o n t r o l l a w s f o r c h a l l e n g i n g d y n a m i c a l s y s t e m s ,
s u c h a s r o b o t m a n i p u l a t o r s , h i g h - p e r f o r m a n c e a i r c r a f t , a n d
u n d e r w a t e r o r s p a c e v e h i c l e s . T h e s e s y s t e m s h a v e s i m i l a r
c h a r a c t e r i s t i c s . F i r s t , t h e y a r e d i c u l t t o c o n t r o l b e c a u s e
o f t h e h i g h l y n o n l i n e a r c h a r a c t e r o f t h e i r e q u a t i o n s . T h i s i s
p a r t i c u l a r l y t r u e w h e n t h e s e s y s t e m s a r e r e q u i r e d t o p e r f o r m
f a s t a n g u l a r m a n e u v e r s . I n s u c h c a s e s , t h e c r o s s - c o u p l i n g
t e r m s i n t h e e q u a t i o n s b e c o m e s i g n i c a n t , d o m i n a t i n g t h e
l i n e a r t e r m s . A s a r e s u l t , l i n e a r c o n t r o l t e c h n i q u e s f o r s u c h
s y s t e m s a r e o f t e n i n a d e q u a t e
1
. S e c o n d , t h e d y n a m i c s o f a l l
t h e s e s y s t e m s h a v e t h e s a m e u n d e r l y i n g p r o p e r t y : N a m e l y ,
t h e y d e s c r i b e a r i g i d ( o r a l m o s t r i g i d ) b o d y i n r o t a t i o n a l m o -
t i o n . I t i s o f i n t e r e s t t o d e v e l o p a c o m p r e h e n s i v e t h e o r y t h a t
w i l l a l l o w a b e t t e r u n d e r s t a n d i n g o f t h e c o m p l e x d y n a m i c
b e h a v i o r o f t h e m o t i o n o f r o t a t i n g b o d i e s . A c o r n e r s t o n e i n
t h i s e o r t i s t h e d e v e l o p m e n t o f a l t e r n a t i v e d e s c r i p t i o n s o f
t h e k i n e m a t i c s o f t h e r o t a t i o n a l m o t i o n .
I n t h i s p a p e r w e a r e i n t e r e s t e d i n t h e d e s c r i p t i o n a n d
c o n t r o l o f t h e a t t i t u d e m o t i o n u s i n g o n l y m i n i m a l , t h r e e -
A s s i s t a n t P r o f e s s o r , D e p a r t m e n t o f M e c h a n i c a l , A e r o s p a c e
a n d N u c l e a r E n g i n e e r i n g . M e m b e r A I A A .
d i m e n s i o n a l p a r a m e t e r i z a t i o n s . T w o s u c h t h r e e - d i m e n s i o n a l
p a r a m e t e r i z a t i o n s w i l l b e u s e d : T h e c l a s s i c a l ( C a y l e y - ) R o -
d r i g u e s a n d t h e M o d i e d R o d r i g u e s p a r a m e t e r s . S i n c e t h e
M o d i e d R o d r i g u e s k i n e m a t i c p a r a m e t e r i z a t i o n i s n e i t h e r a s
w i d e l y k n o w n n o r a s f r e q u e n t l y u s e d a s t h e c l a s s i c a l R o -
d r i g u e s p a r a m e t e r s , w e d e e m i t n e c e s s a r y t o r e v i e w s o m e o f
t h e a d v a n t a g e s o f t h e f o r m e r . I n p a r t i c u l a r , w e s h o w t h a t
t h e M o d i e d R o d r i g u e s p a r a m e t e r i z a t i o n i s , i n s o m e s e n s e ,
t h e \ b e s t " t h r e e - d i m e n s i o n a l r e p r e s e n t a t i o n o f t h e a t t i t u d e
m o t i o n .
T h e s c o p e o f t h i s p a p e r i s t w o f o l d : F i r s t , t o i n t r o d u c e
a k i n e m a t i c d e s c r i p t i o n u s i n g t h e M o d i e d R o d r i g u e s p a -
r a m e t e r s a n d t o b r i e y d i s c u s s i t s a d v a n t a g e s o v e r t h e o t h e r
c l a s s i c a l t h r e e - d i m e n s i o n a l p a r a m e t e r i z a t i o n s , i n p a r t i c u l a r
t h e R o d r i g u e s p a r a m e t e r s . T h e s e c o n d s c o p e o f t h e p a p e r
i s t o d e m o n s t r a t e t h e p o t e n t i a l o f t h e M o d i e d R o d r i g u e s
p a r a m e t e r s f o r c o n t r o l a p p l i c a t i o n s . I n p a r t i c u l a r , w e s h o w
h o w t o d e r i v e l i n e a r g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z i n g c o n -
t r o l l a w s u s i n g t h e s e p a r a m e t e r s . S i n c e m o s t o f t h e s t a b i -
l i z a t i o n r e s u l t s a l s o h o l d f o r t h e R o d r i g u e s p a r a m e t e r s w e
d e r i v e , i n p a r a l l e l , s i m i l a r r e s u l t s f o r t h e s e p a r a m e t e r s a s
w e l l . I n t h e s e c o n d p a r t o f t h e p a p e r w e a d d r e s s t h e p r o b -
l e m o f t h e o p t i m a l r e g u l a t i o n o f t h e a t t i t u d e m o t i o n i n t e r m s
o f t h e p r e v i o u s k i n e m a t i c p a r a m e t e r s . I n p a r t i c u l a r , w e i n -
v e s t i g a t e t h e o p t i m a l i t y p r o p e r t i e s o f t h e p r e v i o u s l y d e r i v e d
s t a b i l i z i n g f e e d b a c k c o n t r o l l a w s .
O p t i m a l c o n t r o l t h e o r y f o r a r i g i d b o d y h a s a l o n g
h i s t o r y
2 5
. M o s t o f t h e s e r e f e r e n c e s e i t h e r a d d r e s s t h e o p t i -
m a l c o n t r o l p r o b l e m o f t h e a n g u l a r v e l o c i t y e q u a t i o n s o n l y
2 4
( i . e . , w i t h o u t a n y r e f e r e n c e t o t h e k i n e m a t i c s ) , o r t h e y s o l v e
t h e o p e n - l o o p o p t i m a l c o n t r o l p r o b l e m w h i c h , v i a P o n t r y a -
g i n ' s M a x i m u m P r i n c i p l e l e a d s , t o a T w o - P o i n t - B o u n d a r y -
V a l u e P r o b l e m . T h i s p r o b l e m c a n b e s o l v e d , i n g e n e r a l , u s -
i n g n u m e r i c a l t e c h n i q u e s
6 8
. A t t h e s a m e t i m e , t h e s y n -
t h e s i s p r o b l e m ( i . e . , t h e o p t i m a l f e e d b a c k p r o b l e m ) i s m u c h
m o r e d i c u l t a n d h a s b e e n m a i n l y a d d r e s s e d i n t h e c o n t e x t
o f t i m e - o p t i m a l m a n e u v e r s ( s e e R e f . 9 a n d t h e r e f e r e n c e s
t h e r e i n ) . O t h e r o p t i m a l f e e d b a c k r e s u l t s i n c l u d e R e f s . 1 0 -
1 2 . T h e R e f e r e n c e 1 3 c o n t a i n s a c o m p r e h e n s i v e c o m p i l a t i o n
o f m o s t o f t h e e x i s t i n g r e s u l t s o n t h e r i g i d b o d y o p t i m a l c o n -
t r o l . I n t h i s p a p e r w e s e e k s o l u t i o n s t o t h e o p t i m a l f e e d b a c k
r e g u l a t i o n p r o b l e m o f a r i g i d b o d y s u b j e c t t o a q u a d r a t i c
c o s t w h e r e b o t h t h e a n g u l a r v e l o c i t y a n d t h e o r i e n t a t i o n o f
t h e b o d y a r e r e g u l a t e d . T a k i n g i n t o c o n s i d e r a t i o n t h e c a s -
c a d e i n t e r c o n n e c t i o n o f t h e s y s t e m e q u a t i o n s , w e r s t s t a t e
t h e o p t i m a l r e g u l a t i o n p r o b l e m f o r t h e k i n e m a t i c s o f t h e a t -
t i t u d e m o t i o n w h e n t h e a n g u l a r v e l o c i t y a c t s a s a c o n t r o l i n -
p u t . T h e c o s t i n c l u d e s a p e n a l t y o n t h e o r i e n t a t i o n p a r a m e -
t e r s a n d t h e a n g u l a r v e l o c i t y . T h e a c t u a l c o n t r o l i n p u t i s t h e
a c t i n g t o r q u e e n t e r i n g t h e s y s t e m t h r o u g h E u l e r ' s e q u a t i o n s
( t h e d y n a m i c s ) . T h e o p t i m a l r e g u l a t i o n w h e n t h e d y n a m -
1
-
7/31/2019 Stabilization and Optimality Results
2/9
i c s i s i n c l u d e d i n t h e p r o b l e m , a n d f o r g e n e r a l p e r f o r m a n c e
i n d i c e s i s n o t y e t s o l v e d | a s f a r a s t h e a u t h o r s k n o w s . H o w -
e v e r , t h e o p t i m i z a t i o n p r o b l e m f o r t h e k i n e m a t i c s p r o v i d e s
a l o w e r b o u n d o n t h e a c h i e v a b l e p e r f o r m a n c e f o r t h e w h o l e
s y s t e m f o r t h e s a m e c o s t f u n c t i o n a l . A c t u a l l y , w e s h o w t h a t
i f t h e d y n a m i c s i s f a s t ( o r c a n b e m a d e f a s t e n o u g h t h r o u g h
t h e a p p r o p r i a t e c h o i c e o f t h e c o n t r o l i n p u t ) o n e i s a b l e t o
r e c o v e r t h i s p e r f o r m a n c e a s y m p t o t i c a l l y . W e s h o w h o w s u c h
a c o n t r o l l e r c a n b e c o n s t r u c t e d | a n d t h u s a c h i e v e t h e o p -
t i m a l p e r f o r m a n c e | u n d e r t h e a s s u m p t i o n t h a t t h e r e i s n o
p e n a l t y o n t h e c o n t r o l e o r t . T h i s c o n t r o l l e r w i l l i n c l u d e , i n
g e n e r a l , a h i g h g a i n p o r t i o n . M o t i v a t e d b y t h e o p t i m a l c h a r -
a c t e r i s t i c s o f t h i s c o n t r o l l e r w e d e r i v e a n o p t i m a l c o n t r o l l e r
w h i c h p e n a l i z e s i t s h i g h g a i n p o r t i o n .
K i n e m a t i c s O v e r v i e w
T h e d y n a m i c s o f t h e r o t a t i o n a l m o t i o n o f a r i g i d b o d y a r e
d e s c r i b e d b y t h e f o l l o w i n g s e t o f d i e r e n t i a l e q u a t i o n s
J ! = S ( ! ) J ! + u ! ( 0 ) = !
0
( 1 )
w h e r e t h e s y m b o l S ( ) d e n o t e s a 3 3 s k e w - s y m m e t r i c m a -
t r i x , t h a t i s ,
S ( ! ) =
"
0 !
3
; !
2
; !
3
0 !
1
!
2
; !
1
0
#
( 2 )
I n a d d i t i o n t o E q . ( 1 ) , w h i c h p r o v i d e s t h e t i m e h i s t o r y o f
t h e a n g u l a r v e l o c i t y v e c t o r , t h e o r i e n t a t i o n o f a r i g i d b o d y i s
g i v e n b y a s e t o f k i n e m a t i c e q u a t i o n s . T y p i c a l l y , t h e E u l e r
p a r a m e t e r s ( q u a t e r n i o n ) , t h e C a y l e y - R o d r i g u e s p a r a m e t e r s ,
o r t h e E u l e r i a n a n g l e s a r e u s e d t o p a r a m e t e r i z e t h e a t t i t u d e
k i n e m a t i c s . I n t h e s e q u e l , w e b r i e y r e v i e w t h e t w o m a i n
k i n e m a t i c p a r a m e t e r i z a t i o n s u s e d i n t h i s p a p e r , i . e . , t h e R o -
d r i g u e s p a r a m e t e r s a n d t h e M o d i e d R o d r i g u e s p a r a m e t e r s .
B o t h c a n b e v i e w e d a s n o r m a l i z e d v e r s i o n s o f t h e E u l e r p a -
r a m e t e r s .
L e t d e n o t e t h e p r i n c i p a l a n g l e a n d l e t
e d e n o t e t h e
p r i n c i p a l a x i s a s s o c i a t e d w i t h t h e E u l e r ' s T h e o r e m
1 4
. T h e
E u l e r p a r a m e t e r s a r e d e n e d b y
q
0
: = c o s
2
q = e s i n
2
( i = 1 2 3 ) ( 3 )
T h i s i s a f o u r - d i m e n s i o n a l p a r a m e t e r i z a t i o n , h e n c e r e d u n -
d a n t . T h e c o n s t r a i n t a m o n g t h e E u l e r p a r a m e t e r s ( q
2
0
+ q
2
1
+
q
2
2
+ q
2
3
= 1 ) c a n b e e l i m i n a t e d b y r e n o r m a l i z a t i o n . T h e R o -
d r i g u e s p a r a m e t e r s e l i m i n a t e t h e c o n s t r a i n t a s s o c i a t e d w i t h
t h e E u l e r p a r a m e t e r s e t { t h u s r e d u c i n g t h e n u m b e r o f c o -
o r d i n a t e s n e c e s s a r y t o d e s c r i b e t h e k i n e m a t i c s f r o m f o u r t o
t h r e e { b y i n t r o d u c i n g t h e r a t i o o f t h e E u l e r p a r a m e t e r s a s
n e w c o o r d i n a t e s
=
q
q
0
( i = 1 2 3 ) ( 4 )
L e t t i n g = (
1
2
3
)
T
2 I R
3
, t h e a s s o c i a t e d k i n e m a t i c
e q u a t i o n s t a k e t h e f o r m
1 4
= H ( ) ! ( 0 ) =
0
( 5 )
w h e r e
H ( ) =
1
2
( I ; S ( ) +
T
) ( 6 )
a n d I d e n o t e s t h e 3 3 i d e n t i t y m a t r i x . I t c a n b e i m m e d i -
a t e l y s h o w n t h a t t h e m a t r i x H ( ) s a t i s e s t h e f o l l o w i n g t w o
i d e n t i t i e s
T
H ( ) ! =
1 +
T
2
T
! ( 7 )
a n d
H
T
( ) ( I +
T
)
1
H ( ) =
1 +
T
4
I ( 8 )
f o r a l l ! 2 I R
3
T h e r s t i d e n t i t y i s e a s i l y s h o w n b y d i r e c t c a l c u l a t i o n . I n
o r d e r t o s h o w t h e s e c o n d i d e n t i t y , s u b s t i t u t e E q . ( 6 ) i n t o t h e
l e f t - h a n d s i d e o f E q . ( 8 ) a n d e x p a n d t o g e t
H
T
( ) ( I +
T
)
1
H ( )
=
1
4
( I + S ( ) +
T
) ( I +
T
)
1
( I + S ( ) +
T
)
=
1
4
( I + S ( ) +
T
) ;
1
4
( I + S ( ) +
T
) ( I +
T
)
1
S (
=
1
4
( I + S ( ) +
T
) ;
1
4
S ( ) ;
1
4
S ( ) ( I +
T
)
1
S ( ) ( 9
I t c a n b e s h o w n t h a t
( I +
T
)
1
= I ;
T
1 +
T
( 1 0 )
a n d
S
2
( ) = ;
T
I +
T
( 1 1 )
S u b s t i t u t i n g t h e l a s t t w o e x p r e s s i o n s i n E q . ( 9 ) a n d u s i n g
t h e f a c t t h a t S ( ) = 0 o n e o b t a i n s
H
T
( ) ( I +
T
)
1
H ( )
=
1
4
( I +
T
) ;
S
2
( )
4
+
1
4
1
1 +
T
S ( )
T
S ( )
=
1 +
T
4
I ( 1 2 )
a s c l a i m e d .
T h e v e c t o r o f t h e R o d r i g u e s p a r a m e t e r s i s r e l a t e d t o t h e
p r i n c i p a l v e c t o r a n d t h e p r i n c i p a l a n g l e t h r o u g h
=
e t a n
2
( 1 3 )
A s i t i s e v i d e n t f r o m E q . ( 1 3 ) , t h e c l a s s i c a l C a y l e y - R o d r i g u e s
p a r a m e t e r s c a n n o t b e u s e d t o d e s c r i b e e i g e n a x i s r o t a t i o n s
o f m o r e t h a n 1 8 0 d e g . T h i s i s t h e r e a s o n w h y t h e C a y l e y -
R o d r i g u e s p a r a m e t e r s w e r e , f o r t h e m o s t p a r t , i g n o r e d i n t h e
l i t e r a t u r e o f a t t i t u d e d y n a m i c s . R e v i v e d i n t e r e s t i n t h e s e
p a r a m e t e r s s t e m s m a i n l y f r o m t h e i r p o t e n t i a l a d v a n t a g e s i n
c o n t r o l a n d s t a b i l i z a t i o n p r o b l e m s
1 5 1 7
I f i n s t e a d o f u s i n g E q . ( 4 ) o n e e l i m i n a t e s t h e E u l e r p a r a m -
e t e r c o n s t r a i n t b y i n t r o d u c i n g t h e p a r a m e t e r s
=
q
1 + q
0
( i = 1 2 3 ) ( 1 4 )
o n e o b t a i n s t h e f o l l o w i n g s e t o f d i e r e n t i a l e q u a t i o n s i n t e r m s
o f t h e v e c t o r = (
1
2
3
)
T
2 I R
3
= G ( ) ! ( 0 ) =
0
( 1 5 )
w h e r e
G ( ) =
1
2
I ; S ( ) +
T
;
1 +
T
2
I
( 1 6 )
T h e p r o p o s e d k i n e m a t i c d e s c r i p t i o n i s d e r i v e d f r o m t h e E u -
l e r p a r a m e t e r s v i a s t e r e o g r a p h i c p r o j e c t i o n
1 8
a n d d u e t o i t s
s i m i l a r i t y t o t h e R o d r i g u e s p a r a m e t e r s i s r e f e r r e d t o i n t h e
l i t e r a t u r e a s t h e M o d i e d R o d r i g u e s P a r a m e t e r i z a t i o n
1 4 1 9 2 0
T h e M o d i e d R o d r i g u e s p a r a m e t e r s { a l t h o u g h c l o s e l y r e -
l a t e d t o t h e C a y l e y - R o d r i g u e s p a r a m e t e r s | a r e s u p e r i o r
t o t h e m , s i n c e t h e y a r e n o t l i m i t e d t o e i g e n a x i s r o t a t i o n s o f
o n l y u p t o 1 8 0 d e g . I n d e e d , f r o m E q s . ( 3 ) a n d ( 1 4 ) o n e e a s -
i l y s e e s t h a t t h e M o d i e d R o d r i g u e s p a r a m e t e r v e c t o r i s
r e l a t e d t o t h e p r i n c i p a l a x i s a n d t h e p r i n c i p a l a n g l e t h r o u g h
=
e t a n
4
( 1 7 )
2
-
7/31/2019 Stabilization and Optimality Results
3/9
w h i c h i s w e l l - d e n e d f o r a l l e i g e n a x i s r o t a t i o n s i n t h e r a n g e
0
-
7/31/2019 Stabilization and Optimality Results
4/9
w i t h h I R
3
! I R a c o n t i n u o u s f u n c t i o n s u c h t h a t
T
h ( ) 6=
0 f o r a l l 6= 0
T h e n w e h a v e t h a t t h e f o l l o w i n g t w o c o n d i t i o n s h o l d :
( i ) T h e c o n t r o l l a w
! = ; k
1
1 +
T
2
h ( ) ( 2 3 )
w i t h k
1
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z e s t h e s y s -
t e m i n E q . ( 5 ) a t t h e o r i g i n . M o r e o v e r , U i s a L y a p u n o v
f u n c t i o n f o r t h e a s s o c i a t e d c l o s e d - l o o p s y s t e m .
( i i ) T h e c o n t r o l l a w
u = ; k
1
1 +
T
2
h ( ) ; k
2
! ( 2 4 )
w i t h k
1
> 0 a n d k
2
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i -
l i z e s E q s . ( 1 ) - ( 5 ) a t t h e o r i g i n a n d
V =
1
2
!
T
J ! + k
1
U ( ) ( 2 5 )
i s a L y a p u n o v f u n c t i o n f o r t h e a s s o c i a t e d c l o s e d - l o o p
s y s t e m .
I n o r d e r t o s h o w ( i ) n o t i c e t h a t w i t h t h e c o n t r o l i n E q . ( 2 3 )
t h e c l o s e d - l o o p s y s t e m f o r t h e k i n e m a t i c s b e c o m e s
= ; k
1
H ( )
1 +
T
2
h ( ) ( 2 6 )
S i n c e U i s a p o s i t i v e d e n i t e f u n c t i o n i t c a n b e u s e d a s a
L y a p u n o v f u n c t i o n c a n d i d a t e . U s i n g E q . ( 7 ) t h e d e r i v a t i v e
o f U a l o n g t h e t r a j e c t o r i e s o f t h e c l o s e d - l o o p s y s t e m i s g i v e n
b y
U =
@ U
@
= ; k
1
1 +
T
2
T
h ( ) H ( ) h ( )
= ; k
1
1 +
T
2
2
h
2
( )
2
0 8 2 I R
3
n f 0 g ( 2 7 )
F r o m E q . ( 2 7 ) w e c o n c l u d e t h a t t h e o r i g i n = 0 i s
a s y m p t o t i c a l l y s t a b l e . S i n c e U i s a l s o a s s u m e d t o b e r a d i -
a l l y u n b o u n d e d t h e o r i g i n i s , i n f a c t , g l o b a l l y a s y m p t o t i c a l l y
s t a b l e
2 4
F o r t h e p r o o f o f p a r t ( i i ) , c o n s i d e r t h e c o m p l e t e s y s t e m o f
E q s . ( 1 ) a n d ( 5 ) w i t h c o n t r o l l a w ( 2 4 ) a n d l e t t h e f u n c t i o n i n
E q . ( 2 5 ) b e a L y a p u n o v f u n c t i o n c a n d i d a t e . T h e d e r i v a t i v e
o f V a l o n g t h e t r a j e c t o r i e s o f t h e c l o s e d - l o o p s y s t e m , t a k i n g
i n t o c o n s i d e r a t i o n E q . ( 7 ) , i s g i v e n b y
V = !
T
J ! + k
1
@ U
@
= !
T
( ; k
1
1 +
T
2
h ( ) ; k
2
! ) + k
1
h ( )
T
H ( ) !
= ; k
2
!
2
0 ( 2 8 )
I f V 0 t h e n ! = ! 0 a n d f r o m E q s . ( 1 ) a n d ( 2 4 ) a l s o
0 . T h u s , t h e l a r g e s t i n v a r i a n t s e t s u c h t h a t V = 0 i s
t h e o r i g i n . B y L a S a l l e ' s T h e o r e m
2 4
, t h e s y s t e m i s a s y m p -
t o t i c a l l y s t a b l e a t t h e o r i g i n . S i n c e V i n E q . ( 2 5 ) i s a l s o
r a d i a l l y u n b o u n d e d , t h e c l o s e d l o o p s y s t e m i s a c t u a l l y g l o b -
a l l y a s y m p t o t i c a l l y s t a b l e a t t h e o r i g i n .
E q u a t i o n s ( 2 3 ) a n d ( 2 4 ) p r o v i d e a l a r g e f a m i l y o f s t a b i -
l i z i n g c o n t r o l l a w s f o r t h e s y s t e m o f E q s . ( 1 ) - ( 5 ) . T h e m a i n
o b s t r u c t i o n w i t h t h e u s e o f t h e s e r e s u l t s i s , o f c o u r s e , t h e
f a c t t h a t o n e d o e s n o t h a v e a c o n s t r u c t i v e w a y o f g e n e r a t i n g
t h e p o s i t i v e d e n i t e , r a d i a l l y u n b o u n d e d f u n c t i o n U s a t i s f y -
i n g E q . ( 2 2 ) . O n t h e o t h e r h a n d , a n y s u c h p o s i t i v e d e n i t e ,
r a d i a l l y u n b o u n d e d f u n c t i o n c a n b e u s e d t o g e n e r a t e g l o b -
a l l y a s y m p t o t i c a l l y s t a b i l i z i n g c o n t r o l l a w s f o r t h e s y s t e m i n
E q s . ( 1 ) - ( 5 ) .
T h e e a s i e s t ( b u t b y n o m e a n s t h e o n l y ) c h o i c e f o r U i s t o
p i c k a p o s i t i v e d e n i t e f u n c t i o n i n t e r m s o f t h e m a g n i t u d e
o f a l o n e . T h e c h o i c e
U ( ) =
T
( 2 9 )
f o r e x a m p l e , s a t i s e s E q . ( 2 2 ) w i t h h ( ) = 2 a n d t h e c o n t r o l
l a w i n E q . ( 2 0 ) f o l l o w s d i r e c t l y f r o m E q . ( 2 4 ) . I f o n e c h o o s e s
a d i e r e n t L y a p u n o v f u n c t i o n t h a n t h e o n e i n E q . ( 2 1 ) o n e
e a s i l y e s t a b l i s h e s t h e f a c t t h a t a l i n e a r c o n t r o l l a w s u c e s t o
p r o v i d e g l o b a l a s y m p t o t i c s t a b i l i t y f o r t h e s y s t e m o f E q s . ( 1 )
a n d ( 5 ) . T o s e e t h i s , l e t t h e s y s t e m i n E q . ( 5 ) w i t h ! c o n s i d -
e r e d a s a c o n t r o l v a r i a b l e . O b s e r v e t h a t t h e p o s i t i v e d e n i t e
f u n c t i o n
U ( ) = l n ( 1 +
T
) ( 3 0 )
w h e r e l n ( ) d e n o t e s t h e n a t u r a l l o g a r i t h m , s a t i s e s t h e c o n -
d i t i o n s o f E q . ( 2 2 ) . F o r U a s i n E q . ( 3 0 ) w e g e t t h a t
h ( ) =
2
1 +
T
( 3 1 )
T h e r e f o r e t h e l i n e a r f e e d b a c k c o n t r o l l a w
! = ; k
1
( 3 2 )
a s y m p t o t i c a l l y s t a b i l i z e s t h e s y s t e m ( 5 ) a t t h e o r i g i n . A c t u -
a l l y , s i n c e
U = ; k
1
2
1 +
T
T
H ( )
= ; k
1
2
; k
1
l n ( 1 +
2
) = ; k
1
U ( ) ( 3 3 )
t h e c o n t r o l l a w i n E q . ( 3 2 ) e x p o n e n t i a l l y s t a b i l i z e s t h e s y s t e m
i n E q . ( 5 ) w i t h r a t e o f d e c a y k
1
= 2 . ( I n E q . ( 3 3 ) w e h a v e u s e d
t h e i n e q u a l i t y x l n ( 1 + x ) f o r a l l x 0 )
I n a d d i t i o n , t h e l i n e a r c o n t r o l l a w
u = ; k
1
; k
2
! ( 3 4 )
w i t h k
1
> 0 a n d k
2
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z e s
t h e s y s t e m i n E q s . ( 1 ) a n d ( 5 ) a t t h e o r i g i n . T h i s r e s u l t
f o l l o w s d i r e c t l y f r o m E q . ( 2 4 ) a n d t h e f a c t t h a t t h e f u n c t i o n
V =
1
2
!
T
J ! + k
1
l n ( 1 +
T
) ( 3 5 )
i s a L y a p u n o v f u n c t i o n f o r t h e c l o s e d - l o o p s y s t e m i n
E q s . ( 1 ) - ( 5 ) a n d ( 3 4 ) .
F r o m E q s . ( 2 0 ) a n d ( 2 1 ) a n d E q s . ( 3 4 ) a n d ( 3 5 ) i t i s c l e a r
t h a t o n e h a s , i n e s s e n c e , t r a d e d t h e c o m p l e x i t y o f t h e L y a -
p u n o v f u n c t i o n w i t h t h e c o m p l e x i t y o f t h e r e s u l t i n g c o n t r o l
l a w . L y a p u n o v f u n c t i o n s o f t h e t y p e ( 3 5 ) ( i . e . , \ q u a d r a t i c
p l u s l o g a r i t h m i c " ) h a v e b e e n p r e v i o u s l y i n t r o d u c e d i n c o n -
n e c t i o n w i t h t h e a t t i t u d e s t a b i l i z a t i o n p r o b l e m o f a n a x i -
s y m m e t r i c s p a c e c r a f t u s i n g o n l y t w o c o n t r o l t o r q u e s
2 5
M o d i e d R o d r i g u e s P a r a m e t e r s
S i m i l a r r e s u l t s c a n a l s o b e s h o w n f o r t h e c a s e o f t h e M o d -
i e d R o d r i g u e s p a r a m e t e r s . T h e f o l l o w i n g r e s u l t s , s t a t e d
w i t h o u t p r o o f , p r e s e n t t h e c o r r e s p o n d i n g s t a b i l i z a t i o n r e -
s u l t s i n t e r m s o f t h e s e p a r a m e t e r s .
L e t t h e s y s t e m i n E q . ( 1 5 ) w i t h ! c o n s i d e r e d a s a c o n -
t r o l v a r i a b l e . L e t W I R
3
! I R
+
b e a n y p o s i t i v e d e n i t e ,
r a d i a l l y u n b o u n d e d f u n c t i o n s u c h t h a t
@ W
@
=
T
g ( ) ( 3 6 )
w i t h g I R
3
! I R a c o n t i n u o u s f u n c t i o n , s u c h t h a t
T
g ( ) 6=
0 f o r a l l 6= 0
T h e n w e h a v e t h a t
4
-
7/31/2019 Stabilization and Optimality Results
5/9
( i ) T h e c o n t r o l l a w
! = ; k
1
1 +
T
4
g ( ) ( 3 7 )
w i t h k
1
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z e s ( 1 5 ) a t
t h e o r i g i n . M o r e o v e r , W i s a L y a p u n o v f u n c t i o n f o r t h e
a s s o c i a t e d c l o s e d - l o o p s y s t e m .
( i i ) T h e c o n t r o l l a w
u = ; k
1
1 +
T
4
g ( ) ; k
2
! ( 3 8 )
w i t h k
1
> 0 a n d k
2
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i -
l i z e s t h e s y s t e m ( 1 ) - ( 1 5 ) a t t h e o r i g i n a n d
V =
1
2
!
T
J ! + k
1
W ( ) ( 3 9 )
i s a L y a p u n o v f u n c t i o n f o r t h e a s s o c i a t e d c l o s e d - l o o p
s y s t e m .
O b s e r v i n g t h a t t h e p o s i t i v e d e n i t e f u n c t i o n
W ( ) = l n ( 1 +
T
) ( 4 0 )
s a t i s e s t h e c o n d i t i o n s o f E q . ( 3 6 ) o n e c a n a l s o e a s i l y s h o w
t h a t t h e l i n e a r c o n t r o l l e r
! = ; k
1
( 4 1 )
w i t h k
1
> 0 , g l o b a l l y e x p o n e n t i a l l y s t a b i l i z e s t h e s y s t e m i n
E q . ( 1 5 ) a t t h e o r i g i n w i t h r a t e o f d e c a y k
1
= 2 ( w i t h ! c o n -
s i d e r e d a s a c o n t r o l v a r i a b l e ) . M o r e o v e r , t h e l i n e a r c o n t r o l
l a w
u = ; k
1
; k
2
! ( 4 2 )
w i t h k
1
> 0 a n d k
2
> 0 , g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z e s
E q s . ( 1 ) a n d ( 1 5 ) a t t h e o r i g i n .
A n o n l i n e a r f e e d b a c k c o n t r o l a r i s e s i f o n e u s e s t h e
q u a d r a t i c f u n c t i o n
W ( ) = 2
T
( 4 3 )
i n s t e a d . U s i n g t h i s c h o i c e o f W t h e f e e d b a c k c o n t r o l
u = ; k
1
( 1 +
T
) ; k
2
! ( 4 4 )
g l o b a l l y a s y m p t o t i c a l l y s t a b i l i z e s t h e s y s t e m o f E q s . ( 1 ) a n d
( 1 5 ) a t t h e o r i g i n . T h e p r e v i o u s c o n t r o l l a w i s , i n e s s e n c e ,
t h e c o u n t e r p a r t o f t h e c o n t r o l l a w i n E q . ( 2 0 ) f o r t h e c a s e o f
t h e M o d i e d R o d r i g u e s p a r a m e t e r s .
T h e r e s u l t s o f t h i s s e c t i o n s h o w t h a t t h e r e i s a s i m i l a r
s t r u c t u r e b e t w e e n t h e C a y l e y - R o d r i g u e s a n d t h e M o d i e d
R o d r i g u e s p a r a m e t e r s w h i c h a l l o w s t h e d e r i v a t i o n o f s t a b i -
l i z i n g c o n t r o l l e r s f o r t h e M o d i e d R o d r i g u e s p a r a m e t e r s m u -
t a t i s m u t a n d i s f r o m t h e c o r r e s p o n d i n g r e s u l t s f o r t h e C a y l e y -
R o d r i g u e s p a r a m e t e r s ( a n d v i c e v e r s a ) . D e s p i t e t h i s a p p a r -
e n t s i m i l a r i t y , t h e b e h a v i o r o f t h e t w o s e t s o f k i n e m a t i c p a -
r a m e t e r s c a n v a r y g r e a t l y i n a p p l i c a t i o n s . T h e n u m e r i c a l
e x a m p l e s a t t h e e n d o f t h e p a p e r i l l u s t r a t e t h e r e l a t i v e m e r i t
o f t h e t w o p a r a m e t e r i z a t i o n s i n t h e d e s c r i p t i o n o f t h e a t t i -
t u d e m o t i o n a n d i n c o n t r o l p r o b l e m s .
A s a l a s t r e m a r k , w e n o t e t h a t a l l o f t h e p r o p o s e d c o n t r o l
l a w s h a v e t h e p r o p e r t y t h a t t h e y d o n o t r e q u i r e a n y i n f o r m a -
t i o n a b o u t t h e b o d y p r i n c i p a l m o m e n t s o f i n e r t i a a n d t h e y
a r e t h e r e f o r e r o b u s t w i t h r e s p e c t t o s y s t e m p a r a m e t r i c u n -
c e r t a i n t y .
W e n o w t u r n t o t h e q u e s t i o n o f p e r f o r m a n c e o f t h e p r e v i -
o u s c o n t r o l l e r s .
O p t i m a l i t y R e s u l t s
I n t h i s s e c t i o n w e s h o w t h a t t h e l i n e a r c o n t r o l l a w s f o r
t h e k i n e m a t i c s i n E q s . ( 3 2 ) a n d ( 4 1 ) h a v e c e r t a i n o p t i m a l -
i t y p r o p e r t i e s . I n p a r t i c u l a r , w e s h o w t h a t t h e L y a p u n o v
f u n c t i o n s o f t h e l o g a r i t h m i c t y p e i n E q s . ( 3 0 ) a n d ( 4 0 ) s o l v e
t h e H a m i l t o n - J a c o b i e q u a t i o n a s s o c i a t e d w i t h a n o p t i m i z a -
t i o n p r o b l e m w i t h a p e r f o r m a n c e i n d e x w h i c h i n c l u d e s a
q u a d r a t i c p e n a l t y i n t h e a n g u l a r v e l o c i t y a n d t h e o r i e n t a -
t i o n p a r a m e t e r s o r . W e t h e n i n v e s t i g a t e t h e o p t i m a l i t y
p r o p e r t i e s o f a f a m i l y o f n o n l i n e a r c o n t r o l l a w s f o r t h e c o m -
p l e t e s y s t e m ( i . e . , d y n a m i c s a n d k i n e m a t i c s ) .
R e c a l l i n g t h e c a s c a d e i n t e r c o n n e c t i o n o f t h e d y n a m i c s -
k i n e m a t i c s s u b s y s t e m s w e r s t a d d r e s s a n o p t i m i z a t i o n p r o b -
l e m f o r t h e k i n e m a t i c s o n l y . T o t h i s e n d , c o n s i d e r t h e s y s t e m
i n E q . ( 5 ) w h e r e ! a c t s a s t h e c o n t r o l v a r i a b l e a n d l e t t h e
q u a d r a t i c p e r f o r m a n c e i n d e x
J
1
(
0
! ) =
1
2
Z
1
0
f k
2
( t )
2
+ ! ( t )
2
g d t ( 4 5 )
w h e r e k s o m e p o s i t i v e c o n s t a n t . N o t i c e t h a t t h i s f u n c t i o n a l
i s a t r u e p e r f o r m a n c e i n d e x i n t h e s e n s e t h a t i t p e n a l i z e s t h e
s t a t e ( ) a n d t h e c o n t r o l i n p u t ( ! )
I n t h e p r e v i o u s s e c t i o n w e h a v e s h o w n t h a t t h e c o n t r o l
l a w
!
( ) = ; k ( 4 6 )
r e n d e r s t h e c l o s e d - l o o p s y s t e m g l o b a l l y e x p o n e n t i a l l y s t a -
b l e a t t h e o r i g i n . W e w i l l n o w s h o w t h a t t h i s c o n t r o l l a w
a l s o m i n i m i z e s ( 4 5 ) a n d t h e m i n i m u m v a l u e o f t h e c o s t i s
J
1
(
0
) = k l n ( 1 +
0
2
)
A c c o r d i n g t o H a m i l t o n - J a c o b i t h e o r y t h e o p t i m a l f e e d -
b a c k c o n t r o l !
f o r t h e p r e v i o u s p r o b l e m i s g i v e n b y
0 = m i n
!
f
k
2
2
k k
2
+
1
2
k ! k
2
+
@ V
@
H ( ) ! g ( 4 7 )
T h e r e f o r e , t h e H a m i l t o n - J a c o b i e q u a t i o n a s s o c i a t e d w i t h t h e
o p t i m a l c o n t r o l p r o b l e m i n E q s . ( 5 ) - ( 4 5 ) i s g i v e n b y
k
2
2
; H
T
( )
@
T
V
@
2
= 0 8 2 I R
3
( 4 8 )
I f V i s a p o s i t i v e d e n i t e s o l u t i o n t o t h i s e q u a t i o n , t h e n a
s i m p l e c a l c u l a t i o n s h o w s t h a t t h e c o n t r o l l a w
!
( ) = ; H
T
( )
@
T
V
@
( 4 9 )
m i n i m i z e s t h e c o s t i n E q . ( 4 5 ) . M o r e o v e r , t h e o p t i m a l c o s t
i s J
(
0
) = J (
0
!
) = V (
0
)
N o t i c e n o w t h a t t h e p o s i t i v e d e n i t e f u n c t i o n d e n e d b y
V
1
( ) = k l n ( 1 +
2
) ( 5 0 )
p r o v i d e s a s o l u t i o n t o E q . ( 4 8 ) . T h e o p t i m a l c o n t r o l i n
E q . ( 4 6 ) f o l l o w s t h e n d i r e c t l y f r o m E q . ( 5 0 ) a n d E q . ( 4 9 )
a n d t h e o p t i m a l c o s t i s g i v e n b y V
1
(
0
) = k l n ( 1 +
0
2
)
A s i m i l a r r e s u l t c a n a l s o b e s h o w n f o r t h e M o d i e d R o -
d r i g u e s p a r a m e t e r s . W e s t a t e t h e r e s u l t w i t h o u t p r o o f .
C o n s i d e r t h e s y s t e m i n E q . ( 1 5 ) w h e r e ! a c t s a s t h e c o n t r o l
v a r i a b l e a n d l e t t h e q u a d r a t i c p e r f o r m a n c e i n d e x
J
1
(
0
! ) =
1
2
Z
1
0
f k
2
( t )
2
+ ! ( t )
2
g d t ( 5 1 )
w h e r e k s o m e p o s i t i v e c o n s t a n t .
T h e n t h e c o n t r o l l a w
!
( ) = ; k ( 5 2 )
r e n d e r s t h e c l o s e d - l o o p s y s t e m g l o b a l l y e x p o n e n t i a l l y s t a b l e
a t t h e o r i g i n a n d m i n i m i z e s ( 5 1 ) . M o r e o v e r , t h e m i n i m u m
v a l u e o f t h e c o s t i s J
1
(
0
) = 2 k l n ( 1 +
0
2
)
5
-
7/31/2019 Stabilization and Optimality Results
6/9
A s i m i l a r p r o c e d u r e c a n a l s o b e u s e d t o s h o w t h a t t h e
n o n l i n e a r c o n t r o l l a w s
!
( ) = ; k ( 1 +
2
) ( 5 3 )
a n d
!
( ) = ; k ( 1 +
2
) ( 5 4 )
a r e a l s o o p t i m a l w i t h r e s p e c t t o t h e c o s t s
J
2
(
0
! ) =
1
2
Z
1
0
f k
2
( t )
2
( 1 + ( t )
2
)
2
+ ! ( t )
2
g d t
( 5 5 )
a n d
J
2
(
0
! ) =
1
2
Z
1
0
f k
2
( t )
2
( 1 + ( t )
2
)
2
+ ! ( t )
2
g d t
( 5 6 )
w i t h k s o m e p o s i t i v e c o n s t a n t , f o r t h e s y s t e m s i n E q s . ( 5 ) a n d
( 1 5 ) , r e s p e c t i v e l y . N o t i c e t h a t t h e c o s t f u n c t i o n a l s i n v o l v e
q u a d r a t i c a n d q u a r t i c t e r m s i n t h e s t a t e v a r i a b l e s i n t h i s
c a s e . T h e p r o o f i s b a s e d o n t h e o b s e r v a t i o n t h a t t h e p o s i t i v e
d e n i t e f u n c t i o n s V
2
( ) = k k k
2
a n d V
2
( ) = 2 k
2
s o l v e
t h e r e s p e c t i v e H a m i l t o n - J a c o b i e q u a t i o n s .
T h u s f a r , w e h a v e o n l y c o n s i d e r e d t h e k i n e m a t i c s s u b s y s -
t e m o f t h e a t t i t u d e e q u a t i o n s , t h a t i s , o n l y E q s . ( 5 ) , v i z .
E q s . ( 1 5 ) , w i t h ! a c t i n g a s a c o n t r o l v a r i a b l e . I f t h e d y -
n a m i c s i s s u c i e n t l y f a s t t h e p r e v i o u s r e s u l t s s u c e . I n
t h e s e c a s e s , t h e o p t i m a l a n g u l a r v e l o c i t y p r o l e c a n b e i m -
p l e m e n t e d t h r o u g h t h e d y n a m i c s w i t h o u t s i g n i c a n t d e g r a -
d a t i o n i n p e r f o r m a n c e .
C o n s i d e r t h e f e e d b a c k c o n t r o l
u
a s
= ; S ( ! ) J ! ; k J H ( ) ! ; J ( ! + k ) ( 5 7 )
W i t h t h i s c o n t r o l l a w t h e c l o s e d - l o o p s y s t e m i n E q s . ( 1 ) a n d
( 5 ) b e c o m e s
( ! + k ) = ! + k ( 5 8 a )
= H ( ) ! ( 5 8 b )
w h e r e = 1 = . F o r l a r g e t h i s i s a s i n g u l a r l y p e r t u r b e d
s y s t e m w h e r e t h e d y n a m i c s ( 5 8 a ) i s t h e f a s t s u b s y s t e m a n d
t h e k i n e m a t i c s ( 5 8 b ) i s t h e s l o w s u b s y s t e m . F o r = 0 i n
E q . ( 5 8 a ) o n e o b t a i n s ! = ; k a s i n E q . ( 4 6 ) . T h u s , f o r
! 0 o n e o b t a i n s t h a t ! ! !
. T h i s i m p l i e s t h a t
J
3
( ! u
a s
) =
R
1
0
f k
2
k ( t ) k
2
+ k ! ( t ) k
2
g d t
! k l n ( 1 + k
0
k
2
) = J
1
(
0
) ( 5 9 )
a n d t h e c o s t c a n b e m a d e a r b i t r a r i l y c l o s e t o J
1
(
0
) b y
c h o o s i n g s u c i e n t l y s m a l l . S i n c e , i n g e n e r a l , 6= 0 t h e o p -
t i m a l c o s t J
1
(
0
) p r o v i d e s o n l y a l o w e r b o u n d o n t h e a c h i e v -
a b l e p e r f o r m a n c e w h e n t h e a c t u a l c o n t r o l i n p u t i s t h e b o d y
x e d t o r q u e .
S i m i l a r s t a t e m e n t s c a n a l s o b e m a d e f o r t h e M o d i e d R o -
d r i g u e s p a r a m e t e r s . F o r t h e s a k e o f b r e v i t y , t h e s e r e s u l t s
w i l l n o t b e r e p e a t e d h e r e a n d a r e l e f t a s a n e x e r c i s e t o t h e
r e a d e r .
T h e d i s a d v a n t a g e o f t h e c o n t r o l l a w i n E q . ( 5 7 ) i s , o f
c o u r s e , t h a t i t r e q u i r e s h i g h g a i n i n t e r m s o f . T h i s m a y
n o t b e a c c e p t a b l e i f t h e r e a r e s t r i n g e n t b o u n d s o n t h e a v a i l -
a b l e c o n t r o l e o r t . A m o r e r e a l i s t i c p e r f o r m a n c e i n d e x n e e d s
t o i n c o r p o r a t e a p e n a l t y o n t h e c o n t r o l u a s w e l l . U n f o r t u -
n a t e l y , t h e o p t i m i z a t i o n p r o b l e m f o r a p e r f o r m a n c e i n d e x
w h i c h i s q u a d r a t i c b o t h i n t h e s t a t e a n d t h e c o n t r o l e o r t
r e m a i n s f o r m i d a b l e . A l t e r n a t i v e l y , o n e m a y i n v e s t i g a t e t h e
o p t i m a l i t y p r o p e r t i e s o f t h e c o n t r o l l a w i n E q . ( 5 7 ) a n d , i f
p o s s i b l e , m o d i f y t h i s c o n t r o l s u c h t h a t i t s h i g h - g a i n p o r t i o n
i s p e n a l i z e d .
T h e f o l l o w i n g p r o c e d u r e i s b a s e d o n t h e r e s u l t s o f R e f . 2 6 ,
w h e r e t h e a u t h o r s e x a m i n e d t h e o p t i m a l i t y p r o p e r t i e s o f a
c l a s s o f f e e d b a c k c o n t r o l l a w s f o r r e l a t i v e d e g r e e o n e m i n i -
m u m p h a s e s y s t e m s . A s b e f o r e , w e w i l l p r e s e n t t h e r e s u l t s
f o r t h e R o d r i g u e s p a r a m e t e r s o n l y . T h e r e a d e r i s i n v i t e d
t o d e r i v e t h e c o r r e s p o n d i n g c o n t r o l l a w s a n d p e r f o r m a n c e
f u n c t i o n a l s f o r t h e M o d i e d R o d r i g u e s p a r a m e t e r s f r o m t h e
R o d r i g u e s p a r a m e t e r s c a s e .
A s i t i s e v i d e n t f r o m E q . ( 5 7 ) t h e l a s t t e r m i n t h i s e q u a -
t i o n i s t h e h i g h - g a i n p o r t i o n o f t h e c o n t r o l l e r . W e t h e r e f o r e
c o n s i d e r a m o d i e d c o n t r o l l a w o f t h e f o r m
u = ; S ( ! ) J ! ; k J H ( ) ! + J v ( 6 0 )
w h e r e v m u s t b e k e p t s m a l l . R e c a l l i n g t h e d e s i r a b l e p r o p e r -
t i e s o f t h e r e l a t i o n s h i p ! = ; k , i t i s n a t u r a l t o i n t r o d u c e
t h e v a r i a b l e
z = ! + k ( 6 1 )
a n d d e v e l o p c o n t r o l l a w s w h i c h w i l l m a k e z ! 0 . T h e p e r -
f o r m a n c e i n d e x s h o u l d t h e r e f o r e i n c l u d e a p e n a l t y o n z a s
w e l l a s a p e n a l t y o n t h e c o n t r o l e o r t v
U s i n g E q s . ( 6 1 ) a n d ( 6 0 ) t h e s y s t e m e q u a t i o n s c a n b e
w r i t t e n a s f o l l o w s
z = v ( 6 2 a )
= H ( ) ( z ; k ) ( 6 2 b )
I t i s c l a i m e d t h a t t h e f e e d b a c k c o n t r o l l a w
v
( z ) = ;
; z ( 6 3 )
m a k e s t h e s y s t e m i n E q . ( 6 2 ) e x p o n e n t i a l l y s t a b l e a n d m i n -
i m i z e s t h e c o s t
J
4
( z v ) =
1
2
Z
1
0
f k v +
k
2
+ 2 k k k
2
+
2
k z k
2
g d t ( 6 4 )
T h e p r o o f i s o b t a i n e d a s f o l l o w s . N o t i c e t h a t t h e H a m i l t o n -
J a c o b i e q u a t i o n a s s o c i a t e d w i t h t h e p r e v i o u s o p t i m i z a t i o n
p r o b l e m i s g i v e n b y
;
1
2
k
@ V
@ z
k
2
+ k k k
2
+
2
2
k z k
2
;
@ V
@ z
+
@ V
@
H ( ) ( z ; k ) = 0
( 6 5 )
a n d t h e o p t i m a l c o n t r o l i s g i v e n b y
v
( z ) = ;
;
@
T
V
@ z
( 6 6 )
N o t i c e n o w t h a t t h e p o s i t i v e d e n i t e f u n c t i o n
V
4
( z ) = l n ( 1 + k k
2
) +
2
k z k
2
( 6 7 )
s o l v e s t h e H a m i l t o n - J a c o b i e q u a t i o n ( 6 5 ) . T h e e x p o n e n t i a l
s t a b i l i z a b i l i t y o f t h e c o n t r o l l a w i n E q . ( 6 3 ) t h e n f o l l o w s e a s -
i l y b y u s i n g E q . ( 6 7 ) a s t h e L y a p u n o v f u n c t i o n f o r t h e c l o s e d -
l o o p s y s t e m . T h e m i n i m u m v a l u e o f t h e c o s t i s g i v e n b y
J
4
(
0
z
0
) = J
4
(
0
z
0
v
) = l n ( 1 + k
0
k
2
)
+
2
k z
0
k
2
= V
4
(
0
z
0
) ( 6 8 )
F r o m E q s . ( 6 0 ) a n d ( 6 3 ) w e h a v e , n a l l y , t h a t t h e o p t i m a l
c o n t r o l i s
u
( ! ) = ; S ( ! ) J ! ; k J H ( ) ! ; J
; J ( ! + k ) ( 6 9 )
M o r e o v e r ,
u
= u
a s
; J
( 7 0 )
w h e r e u
a s
i s t h e c o n t r o l i n E q . ( 5 7 ) . C o m p a r i s o n o f E q s . ( 6 3 )
a n d ( 6 4 ) s h o w s t h a t t h e c o n t r o l l a w
~v
( z ) = ; z ( 7 1 )
m i n i m i z e s t h e c o s t
~
J
4
( z ~v ) =
1
2
Z
1
0
f k ~v k
2
+ 2 k k k
2
+
2
k z k
2
g d t ( 7 2 )
6
-
7/31/2019 Stabilization and Optimality Results
7/9
s u b j e c t t o t h e d y n a m i c c o n s t r a i n t s
z = ;
+ ~v ( 7 3 a )
= H ( ) ( z ; k ) ( 7 3 b )
T h e r s t t e r m i n E q . ( 7 2 ) i n c l u d e s a p e n a l t y o n t h e h i g h g a i n
p o r t i o n o f t h e c o n t r o l l e r . M o r e o v e r , n o t i c e t h a t a s ! 1
t h e n v
! ; z a n d u
! u
a s
a n d w e r e c o v e r t h e r e s u l t s o f
t h e c o n t r o l l a w i n E q . ( 5 7 ) .
N u m e r i c a l E x a m p l e s
W e n o w d e m o n s t r a t e t h e p r e v i o u s t h e o r e t i c a l r e s u l t s b y
m e a n s o f n u m e r i c a l s i m u l a t i o n s . W e r s t c o m p a r e t h e l i n -
e a r c o n t r o l l a w s i n E q s . ( 3 4 ) a n d ( 4 2 ) w i t h t h e n o n l i n e a r
c o n t r o l l a w s i n E q s . ( 2 0 ) a n d ( 4 4 ) . W e c o n s i d e r a r i g i d
b o d y w i t h i n e r t i a p a r a m e t e r s J = d i a g ( 1 0 6 3 8 5 ) ( k g m
2
)
T h e i n i t i a l a n g u l a r v e l o c i t i e s a r e z e r o a n d t h e i n i t i a l o r i -
e n t a t i o n c o r r e s p o n d s t o a n e i g e n a x i s / a n g l e r e p r e s e n t a t i o n
e = ( 0 4 8 9 6 0 2 0 3 2 0 8 4 8 0 )
T
a n d = 2 5 r a d . T h a t i s , t h e
i n i t i a l c o n d i t i o n s i n t e r m s o f t h e C a y l e y - R o d r i g u e s p a r a m -
e t e r s a r e g i v e n b y ( 0 ) = ( 1 4 7 3 5 0 6 1 1 5 2 5 5 2 1 )
T
a n d i n
t e r m s o f t h e M o d i e d R o d r i g u e s p a r a m e t e r s a r e g i v e n b y
( 0 ) = ( 0 3 5 3 2 0 1 4 6 6 0 6 1 1 8 )
T
. T h e v a l u e s f o r t h e g a i n s
w e r e c h o s e n a s k
1
= 2 a n d k
2
= 1
T h e r e s u l t s o f t h e s i m u l a t i o n s f o r t h e R o d r i g u e s p a r a m e -
t e r s a r e s h o w n i n F i g u r e s 1 - 2 . T h e s o l i d l i n e s r e p r e s e n t t h e
t r a j e c t o r i e s w i t h t h e n o n l i n e a r c o n t r o l i n E q . ( 2 0 ) a n d t h e
d a s h e d l i n e s r e p r e s e n t t h e t r a j e c t o r i e s w i t h t h e l i n e a r c o n -
t r o l l a w i n E q . ( 3 4 ) . F i g u r e 1 d e p i c t s t h e b e h a v i o r o f t h e
R o d r i g u e s p a r a m e t e r v e c t o r , w h i l e F i g u r e 2 s h o w s t h e t i m e
h i s t o r y o f t h e a s s o c i a t e d c o n t r o l e o r t . O n l y t h e r s t c o m -
p o n e n t o f t h e c o r r e s p o n d i n g v e c t o r s a r e s h o w n h e r e , s i n c e
t h e o t h e r t w o c o m p o n e n t s e x h i b i t s i m i l a r b e h a v i o r .
T h e s e r e s u l t s s h o w t h a t t h e l i n e a r c o n t r o l l e r s e e m s t o p e r -
f o r m b e t t e r t h a n t h e n o n l i n e a r c o n t r o l l e r . I n p a r t i c u l a r , t h e
t r a j e c t o r i e s w i t h t h e l i n e a r c o n t r o l l e r e x h i b i t m u c h s m a l l e r
o v e r s h o o t a n d t h e t r a j e c t o r i e s w i t h t h e n o n l i n e a r c o n t r o l l e r .
I n a d d i t i o n , t h e l i n e a r c o n t r o l l e r u s e s l e s s c o n t r o l e o r t t h a n
t h e n o n l i n e a r c o n t r o l l e r . T h i s c a n b e e x p l a i n e d b y o b s e r v i n g
t h a t t h e i n i t i a l c o n d i t i o n f o r t h e P r i n c i p a l a n g l e g i v e s r i s e t o
r e l a t i v e l y h i g h i n i t i a l v a l u e s f o r t h e R o d r i g u e s k i n e m a t i c p a -
r a m e t e r s . A s a r e s u l t , t h e a d d i t i o n a l q u a d r a t i c t e r m i n t h e
c o n t r o l l a w i n E q . ( 2 0 ) i m p o s e s g r e a t e r c o n t r o l r e q u i r e m e n t s
a n d m o r e d r a s t i c c o n t r o l a c t i o n t h a n t h e l i n e a r c o n t r o l l e r ,
e s p e c i a l l y a t t h e b e g i n n i n g o f t h e m a n e u v e r . F o r s m a l l e r i n i -
t i a l c o n d i t i o n s i t i s e x p e c t e d t h a t t h e t w o c o n t r o l l e r s | a n d
t h e c o r r e s p o n d i n g t r a j e c t o r i e s | w i l l e x h i b i t s i m i l a r b e h a v -
i o r . T h i s i s d u e t o t h e f a c t t h a t a s ! 0 t h e l i n e a r a n d
t h e n o n l i n e a r c o n t r o l l e r s b e c o m e i d e n t i c a l . ( N o t i c e t h a t t h e
l i n e a r i z a t i o n o f t h e c o n t r o l l a w i n E q . ( 2 0 ) i s t h e c o n t r o l l a w
i n E q . ( 3 4 ) a n d h e n c e t h e l i n e a r i z a t i o n s o f t h e c o r r e s p o n d i n g
c l o s e d - l o o p s y s t e m s a r e t h e s a m e . )
T h e c o r r e s p o n d i n g r e s u l t s f o r t h e M o d i e d R o d r i g u e s p a -
r a m e t e r s a r e s h o w n i n F i g u r e s 3 - 4 . T h e c o n t r o l e o r t f o r t h e
t w o c o n t r o l l a w s i s c o m p a r a b l e a l t h o u g h , a g a i n , t h e n o n l i n -
e a r c o n t r o l l e r i n i t i a l l y r e q u i r e s m o r e c o n t r o l e n e r g y t h a n t h e
l i n e a r c o n t r o l l e r . I n l i g h t o f t h e d i s c u s s i o n i n t h e p r e v i o u s
p a r a g r a p h i t s h o u l d b e c l e a r t h a t t h e d i e r e n c e s b e t w e e n
t h e l i n e a r a n d t h e n o n l i n e a r c o n t r o l l e r w o u l d b e c o m e m o r e
d i s t i n c t a s t h e i n i t i a l c o n d i t i o n s a p p r o a c h t h e s i n g u l a r i t y
( = 3 6 0 d e g ) w i t h t h e l i n e a r c o n t r o l l e r p e r f o r m i n g i n c r e a s -
i n g l y b e t t e r a s t h e i n i t i a l v a l u e o f ! 3 6 0 d e g . M o r e o v e r ,
a s ! 1 8 0 d e g ( t h e s i n g u l a r i t y o f t h e C a y l e y - R o d r i g u e s p a -
r a m e t e r i z a t i o n ) i t i s e x p e c t e d t h a t m o r e c o n t r o l e o r t w i l l
b e r e q u i r e d b y t h e c o n t r o l l a w i n E q . ( 3 4 ) t h a n t h e o n e i n
E q . ( 4 2 ) . T h i s i s a c o n s e q u e n c e o f t h e f a c t t h a t t h e M o d i e d
R o d r i g u e s p a r a m e t e r s b e h a v e m o r e \ l i n e a r l y " o v e r a l a r g e r
d o m a i n t h a n t h e C a y l e y - R o d r i g u e s p a r a m e t e r s
2 0
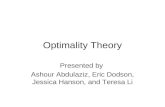
T h e s e c o n d n u m e r i c a l e x a m p l e c o m p a r e s t h e c o n t r o l l a w
i n E q . ( 6 9 ) f o r d i e r e n t v a l u e s o f t h e p a r a m e t e r . T h e
s a m e i n i t i a l c o n d i t i o n s a r e c h o s e n a s b e f o r e , a n d t h e g a i n i s
t a k e n k = 2 . F i g u r e 5 s h o w s t h e t i m e h i s t o r y o f t h e C a y l e y -
R o d r i g u e s p a r a m e t e r s f o r = 0 1 1 a n d 1 0 . T h e r e s p e c t i v e
c o n t r o l h i s t o r i e s a r e p l o t t e d i n F i g . 6 . R e c a l l t h a t i t i s d e -
s i r a b l e t o k e e p s m a l l , b u t o n e m a y n o t m a k e i t t o o s m a l l
e i t h e r , s i n c e t h e n t h e f o u r t h t e r m i n E q . ( 6 9 ) m a y b e c o m e
s i g n i c a n t . B y v a r y i n g o n e c a n s h a p e t h e a c c e p t a b l e c o n -
t r o l a n d s t a t e s p r o l e s . T h e c o s t c r i t e r i o n i n E q s . ( 6 4 ) o r
( 7 2 ) c a n t h e n b e u s e d a s a g u i d e f o r t h e b e s t c h o i c e f o r
F o r t h i s e x a m p l e i t a p p e a r s t h a t a v a l u e a p p r o x i m a t e l y = 1
p r o v i d e s a r e a s o n a b l e c o m p r o m i s e .
0 5 10 15 20 25 30 35 401.5
1
0.5
0
0.5
1
1.5
TIME (sec)
RHO_
1
Solid: Nonlinear, Dashed: Linear
F i g . 1 C o n t r o l l e r c o m p a r i s o n R o d r i g u e s p a r a m e t e r s h i s t o r y .
0 5 10 15 20 25 30 35 4030
25
20
15
10
5
0
5
10
15
20Solid: Nonlinear, Dashed: Linear
U_
1(N
m)
TIME (sec)
F i g . 2 C o n t r o l l e r c o m p a r i s o n C o n t r o l h i s t o r y f o r R o d r i g u e s
p a r a m e t e r s .
C o n c l u s i o n s
W e h a v e p r e s e n t e d a m i n i m a l p a r a m e t e r i z a t i o n f o r t h e
k i n e m a t i c s o f t h e a t t i t u d e m o t i o n w h i c h { a l t h o u g h s i m i l a r
t o t h e c l a s s i c a l C a y l e y - R o d r i g u e s p a r a m e t e r { d o e s n o t h a v e
t h e d i s a d v a n t a g e o f r e s t r i c t i n g t h e p r i n c i p a l a n g l e b e t w e e n 0
a n d 1 8 0 d e g . I n f a c t , u s i n g t h e s e p a r a m e t e r s , a l l e i g e n a x i s r o -
t a t i o n s w i t h i n 0
-
7/31/2019 Stabilization and Optimality Results
8/9
0 5 10 15 20 25 30 35 40 45 500.3
0.2
0.1
0
0.1
0.2
0.3
0.4Solid: Nonlinear, Dashed: Linear
SIGMA_
1
TIME (sec)
F i g . 3 C o n t r o l l e r c o m p a r i s o n M o d i e d R o d r i g u e s p a r a m e -
t e r s h i s t o r y .
0 5 10 15 20 25 30 35 40 45 501.2
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6Solid: Nonlinear, Dashed: Linear
U_
1(N
m)
TIME (sec)
F i g . 4 C o n t r o l l e r c o m p a r i s o n C o n t r o l h i s t o r y f o r M o d i e d
R o d r i g u e s p a r a m e t e r s .
a r i g i d b o d y i n t e r m s o f m i n i m a l , t h r e e - d i m e n s i o n a l p a r a m -
e t e r i z a t i o n s . I n p a r t i c u l a r , a n e w t y p e o f L y a p u n o v f u n c t i o n
f o r t h i s c l a s s o f p r o b l e m s i s p r o p o s e d , w h i c h o f t e n l e a d s t o
l i n e a r c o n t r o l l a w s . T h e p r o p o s e d L y a p u n o v f u n c t i o n s i n -
c l u d e a q u a d r a t i c t e r m i n t h e a n g u l a r v e l o c i t i e s ( t h e k i n e t i c
e n e r g y ) a n d a l o g a r i t h m i c t e r m i n t h e k i n e m a t i c p a r a m e -
t e r s . F i n a l l y , w e h a v e a d d r e s s e d t h e o p t i m a l f e e d b a c k c o n -
t r o l p r o b l e m f o r t h e a t t i t u d e m o t i o n s u b j e c t t o a q u a d r a t i c
c o s t . T h e o p t i m a l c o n t r o l l e r s a r e d e r i v e d b y a n a l y t i c a l l y
s o l v i n g t h e a s s o c i a t e d H a m i l t o n - J a c o b i e q u a t i o n s . A l t h o u g h
t h e c o m p l e t e s o l u t i o n t o t h i s p r o b l e m i s s t i l l u n k n o w n , t h e
r e s u l t s r e p o r t e d i n t h i s p a p e r m a y s h e d s o m e l i g h t f o r p o s s i -
b l e c a n d i d a t e s o l u t i o n s . T h e n u m e r i c a l e x a m p l e s a t t h e e n d
o f t h e p a p e r i n d i c a t e t h a t t h e M o d i e d R o d r i g u e s p a r a m -
e t e r s a r e b e t t e r c o n d i t i o n e d f o r n u m e r i c a l s i m u l a t i o n s a n d
s t a b i l i z a t i o n p u r p o s e s t h a n t h e c l a s s i c a l C a y l e y - R o d r i g u e s
p a r a m e t e r s . T h i s , a l o n g w h i c h t h e f a c t t h a t t h e y a r e n o t
l i m i t e d t o e i g e n a x i s r o t a t i o n s o f o n l y u p t o 1 8 0 d e g , m a k e s
t h e M o d i e d R o d r i g u e s p a r a m e t e r s a n a t t r a c t i v e c h o i c e f o r
a t t i t u d e d e s c r i p t i o n a n d c o n t r o l p r o b l e m s .
A c k n o w l e d g m e n t
T h e a u t h o r a c k n o w l e d g e s h e l p f u l d i s c u s s i o n s w i t h J . M .
L o n g u s k i , J . L . J u n k i n s a n d M . D . S h u s t e r . S u p p o r t f o r t h i s
w o r k w a s p r o v i d e d t h r o u g h t h e U n i v e r s i t y o f V i r g i n i a S E A S
lambda = 0.1
lambda = 1
lambda = 10
0 5 10 150.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6ORIENTATION PARAMETERS
TIME
RHO_
1
F i g . 5 O r i e n t a t i o n p a r a m e t e r r e s p o n s e u s i n g u
lambda = 0.1
lambda = 1
lambda = 10
0 5 10 1550
40
30
20
10
0
10
20
30
40
50CONTROL INPUT
TIME
U_
1
F i g . 6 C o n t r o l i n p u t r e s p o n s e u s i n g u
D e a n ' s F u n d .
1
S h e e n , J . J . , a n d B i s h o p , R . H . , \ S p a c e c r a f t N o n l i n e a r
C o n t r o l , " P a p e r A A S 9 2 - 1 7 2 , A I A A / A A S A s t r o d y n a m -
i c s C o n f e r e n c e , ( H i l t o n H e a d , S C ) , A u g . 1 0 - 1 2 , 1 9 9 2 .
2
A t h a n s , M . , F a l b , P . L . , a n d L a c o s s , R . T . , \ T i m e - ,
F u e l - , a n d E n e r g y - O p t i m a l C o n t r o l o f N o n l i n e a r N o r m -
I n v a r i a n t S y s t e m s , " I R E T r a n s a c t i o n s o n A u t o m a t i c
C o n t r o l , V o l . 8 , J u l y 1 9 6 3 , p p . 1 9 6 { 2 0 2 .
3
D e b s , A . S . , a n d A t h a n s , M . , \ O n t h e O p t i m a l A n g u -
l a r V e l o c i t y C o n t r o l o f A s y m m e t r i c a l S p a c e V e h i c l e s , "
I E E E T r a n s a c t i o n s o n A u t o m a t i c C o n t r o l , V o l . A C - 1 4 ,
F e b . 1 9 6 9 , p p . 8 0 { 8 3 .
4
K u m a r , K . S . P . , \ O n t h e O p t i m u m S t a b i l i z a t i o n o f a
S a t e l l i t e , " I E E E T r a n s a c t i o n o n A e r o s p a c e E l e c t r o n i c
S y s t e m s , V o l . 1 , N o . 2 , 1 9 6 5 , p p . 8 2 { 8 3 .
5
W i n d e k n e c h t , T . G . , \ O p t i m a l S t a b i l i z a t i o n o f R i g i d
B o d y A t t i t u d e , " J o u r n a l o f M a t h e m a t i c a l A n a l y s i s a n d
A p p l i c a t i o n s , V o l . 6 , 1 9 6 3 , p p . 3 2 5 { 3 3 5 .
6
L i n , Y . Y . , a n d K r a i g e , L . G . , \ E n h a n c e d T e c h n i q u e s
f o r S o l v i n g t h e T w o - P o i n t B o u n d a r y - V a l u e P r o b l e m A s -
s o c i a t e d w i t h t h e O p t i m a l A t t i t u d e C o n t r o l o f S p a c e -
c r a f t , " J o u r n a l o f t h e A s t r o n a u t i c a l S c i e n c e s , V o l . 3 7 ,
N o . 1 , 1 9 8 9 , p p . 1 { 1 5 .
7
V a d a l i , S . R . , K r a i g e , L . G . , a n d J u n k i n s , J . L . , \ N e w
R e s u l t s o n t h e O p t i m a l S p a c e c r a f t A t t i t u d e M a n e u v e r
P r o b l e m , " J o u r n a l o f G u i d a n c e , C o n t r o l , a n d D y n a m -
i c s , V o l . 7 , N o . 3 , 1 9 8 4 , p p . 3 7 8 { 3 8 0 .
8
-
7/31/2019 Stabilization and Optimality Results
9/9
8
V a d a l i , S . R . , a n d J u n k i n s , J . L . , \ O p t i m a l O p e n - L o o p
a n d S t a b l e F e e d b a c k C o n t r o l o f R i g i d S p a c e c r a f t A t -
t i t u d e M a n e u v e r s , " J o u r n a l o f t h e A s t r o n a u t i c a l S c i -
e n c e s , V o l . 3 2 , N o . 2 , 1 9 8 4 , p p . 1 0 5 { 1 2 2 .
9
S c r i v e n e r , S . L . , a n d T h o m s o n , R . C . , \ S u r v e y o f T i m e -
O p t i m a l A t t i t u d e M a n e u v e r s , " J o u r n a l o f G u i d a n c e ,
C o n t r o l , a n d D y n a m i c s , V o l . 1 7 , N o . 2 , 1 9 9 4 , p p . 2 2 5 {
2 3 3 .
1 0
C a r r i n g t o n , C . K . , a n d J u n k i n s , J . L . , \ O p t i m a l N o n -
l i n e a r F e e d b a c k C o n t r o l f o r S p a c e c r a f t A t t i t u d e M a -
n e u v e r s , " J o u r n a l o f G u i d a n c e , C o n t r o l , a n d D y n a m i c s
V o l . 9 , N o . 1 , 1 9 8 6 , p p . 9 9 { 1 0 7 .
1 1
D w y e r , T . A . W . , a n d S e n a , R . P . , \ C o n t r o l o f S p a c e -
c r a f t S l e w i n g M a n e u v e r s , " i n P r o c e e d i n g s o f t h e 2 1 s t
C o n f e r e n c e o n D e c i s i o n a n d C o n t r o l , O r l a n d o , F L ,
1 9 8 2 , p p . 1 1 4 2 { 1 1 4 4 .
1 2
D w y e r , T . A . W . , \ T h e C o n t r o l o f A n g u l a r M o m e n t u m
f o r A s y m m e t r i c R i g i d B o d i e s , " I E E E T r a n s a c t i o n s o n
A u t o m a t i c C o n t r o l , V o l . A C - 2 7 , N o . 3 , 1 9 8 2 , p p . 6 8 6 {
6 8 8 .
1 3
J u n k i n s , J . L . , a n d T u r n e r , J . , O p t i m a l S p a c e c r a f t R o -
t a t i o n a l M a n e u v e r s , E l s e v i e r , N e w Y o r k , 1 9 8 6 .
1 4
S h u s t e r , M . D . , \ A S u r v e y o f A t t i t u d e R e p r e s e n t a -
t i o n s , " J o u r n a l o f t h e A s t r o n a u t i c a l S c i e n c e s , V o l . 4 1 ,
N o . 4 , 1 9 9 3 , p p . 4 3 9 { 5 1 7 .
1 5
J u n k i n s , J . L . , R a h m a n , Z . H . , a n d B a n g , H . , \ N e a r -
M i n i m u m - T i m e C o n t r o l o f D i s t r i b u t e d P a r a m e t e r S y s -
t e m s : A n a l y t i c a l a n d E x p e r i m e n t a l R e s u l t s , " J o u r n a l
o f G u i d a n c e , C o n t r o l , a n d D y n a m i c s , V o l . 1 4 , N o . 2 ,
1 9 9 1 , p p . 4 0 6 { 4 1 5 .
1 6
L i , Z . , a n d B a i n u m , P . M . , \ 3 - D m a n e u v e r a n d V i b r a -
t i o n C o n t r o l o f F l e x i b l e S p a c e c r a f t U s i n g M o m e n t u m
E x c h a n g e F e e d b a c k C o n t r o l C o n c e p t , " P a p e r A A S 9 2 -
4 4 4 7 , A I A A / A A S A s t r o d y n a m i c s C o n f e r e n c e , ( H i l t o n
H e a d , S C ) , A u g . 1 0 - 1 2 , 1 9 9 2 .
1 7
D w y e r , T . A . W . , \ G i b b s V e c t o r K i n e m a t i c s a n d D e -
c o u p l e d A t t i t u d e M a n e u v e r s , " i n P r o c e e d i n g s o f t h e
2 3 r d A n n u a l A l l e r t o n C o n f e r e n c e o n C o m m u n i c a t i o n s ,
C o n t r o l a n d C o m p u t i n g , M o n t i c e l l o , I L , 1 9 8 5 , p p . 1 4 4 {
1 4 5 .
1 8
T s i o t r a s , P . , \ O n N e w P a r a m e t e r i z a t i o n s o f t h e R o t a -
t i o n G r o u p i n A t t i t u d e K i n e m a t i c s , " T e c h n i c a l R e p o r t ,
D e p t . o f A e r o n a u t i c s & A s t r o n a u t i c s , P u r d u e U n i v e r -
s i t y , W e s t L a f a y e t t e , I N , J a n u a r y 1 9 9 4 .
1 9
M a r a n d i , S . R . , a n d M o d i , V . , \ A P r e f e r r e d C o o r d i -
n a t e S y s t e m a n d t h e A s s o c i a t e d O r i e n t a t i o n R e p r e -
s e n t a t i o n i n A t t i t u d e D y n a m i c s , " A c t a A s t r o n a u t i c a
V o l . 1 5 , N o . 1 1 , 1 9 8 7 , p p . 8 3 3 { 8 4 3 .
2 0
S c h a u b , H . , T s i o t r a s , P . , a n d J u n k i n s , J . L . , \ P r i n c i -
p a l R o t a t i o n R e p r e s e n t a t i o n s o f P r o p e r N N O r t h o g -
o n a l M a t r i c e s , " I n t e r n a t i o n a l J o u r n a l o f E n g i n e e r i n g
S c i e n c e , V o l . 3 3 , N o . 1 5 , 1 9 9 5 , p p . 2 2 7 7 { 2 2 9 5 .
2 1
M o r t e n s e n , R . E . , \ A G l o b a l l y S t a b l e L i n e a r A t t i t u d e
R e g u l a t o r , " I n t e r n a t i o n a l J o u r n a l o f C o n t r o l , V o l . 8 ,
N o . 3 , 1 9 6 8 , p p . 2 9 7 { 3 0 2 .
2 2
T s i o t r a s , P . , \ A P a s s i v i t y A p p r o a c h t o A t t i t u d e S t a b i -
l i z a t i o n U s i n g N o n r e d u n d a n t S e t s o f K i n e m a t i c P a r a m -
e t e r s , " i n P r o c e e d i n g s o f t h e 3 4 t h C o n f e r e n c e o n D e c i -
s i o n a n d C o n t r o l , N e w O r l e a n s , L A , D e c . 1 3 - 1 5 , 1 9 9 5 ,
p p . 5 1 5 { 5 2 0 .
2 3
W i e , B . , a n d B a r b a , P . M . , \ Q u a t e r n i o n F e e d b a c k f o r
S p a c e c r a f t L a r g e A n g l e M a n e u v e r s , " J o u r n a l o f G u i d -
a n c e , C o n t r o l , a n d D y n a m i c s , V o l . 8 , N o . 3 , 1 9 8 5 ,
p p . 3 6 0 { 3 6 5 .
2 4
K h a l i l , H . K . , N o n l i n e a r S y s t e m s , M a c M i l l a n P u b l i s h -
i n g C o . , N e w Y o r k , 1 9 9 2 , p p . 1 1 2 { 1 1 8 .
2 5
T s i o t r a s , P . , a n d L o n g u s k i , J . M . , \ S p i n - A x i s S t a -
b i l i z a t i o n o f S y m m e t r i c S p a c e c r a f t w i t h T w o C o n t r o l
T o r q u e s , " S y s t e m s a n d C o n t r o l L e t t e r s , V o l . 2 3 , 1 9 9 4 ,
p p . 3 9 5 { 4 0 2 .
2 6
W a n , C . J . , a n d B e r n s t e i n , D . S . , \ N o n l i n e a r F e e d b a c k
C o n t r o l w i t h G l o b a l S t a b i l i z a t i o n , " D y n a m i c s a n d C o n -
t r o l , V o l . 5 , 1 9 9 5 , p p . 3 2 1 { 3 4 6 .