SSOL: Radio Telescope Industrial Review Panel Presentation
59
SSOL: Radio SSOL: Radio Telescope Telescope Industrial Review Industrial Review Panel Panel Presentation Presentation Team Ongo-02c Team Ongo-02c December 7 December 7 th th , 2005 , 2005 Client: Iowa Space Grant Client: Iowa Space Grant Consortium Consortium Advisor: Dr. Basart Advisor: Dr. Basart
-
Upload
sebastian-mathis -
Category
Documents
-
view
30 -
download
1
description
SSOL: Radio Telescope Industrial Review Panel Presentation. Team Ongo-02c December 7 th , 2005 Client: Iowa Space Grant Consortium Advisor: Dr. Basart. Second Semester Students : Temur Safdar (EE) Eric Schares (EE) Nicholas Zeitler (CprE) First Semester Students : Matt Fischer (CprE) - PowerPoint PPT Presentation
Transcript of SSOL: Radio Telescope Industrial Review Panel Presentation
SSOL: Radio TelescopeSSOL: Radio TelescopeIndustrial Review Panel Industrial Review Panel
PresentationPresentation
Team Ongo-02cTeam Ongo-02c
December 7December 7thth, 2005, 2005
Client: Iowa Space Grant ConsortiumClient: Iowa Space Grant Consortium
Advisor: Dr. BasartAdvisor: Dr. Basart

Team MembersTeam MembersSecond SemesterSecond Semester Students Students:: Temur Safdar (EE)Temur Safdar (EE) Eric Schares (EE) Eric Schares (EE) Nicholas Zeitler (CprE)Nicholas Zeitler (CprE)
First SemesterFirst Semester Students Students:: Matt Fischer (CprE)Matt Fischer (CprE) LaTasha Mabry (EE) LaTasha Mabry (EE) Ankur Tandon (CprE)Ankur Tandon (CprE)
Eng. 466 StudentsEng. 466 Students Parikshit Advani (CprE)Parikshit Advani (CprE) Ron Charles (ME)Ron Charles (ME) Matt Moore (ME)Matt Moore (ME)
Fick Observatory
Presentation OutlinePresentation Outline DefinitionsDefinitions
AcknowledgementsAcknowledgements
Problem StatementProblem Statement
Operating EnvironmentOperating Environment
Intended Users and UsesIntended Users and Uses
End ProductEnd Product
Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments
Project ActivitiesProject Activities
Resource RequirementsResource Requirements
Lessons LearnedLessons Learned
Closing SummaryClosing Summary Radio Telescope

List of DefinitionsList of Definitions
DAQ:DAQ: Data acquisition
LNA:LNA: Low noise amplifier Amplifies radio signal from the source to a level great enough to be used in processing
Azimuth:Azimuth: The measurement of the The measurement of the horizontal movement of horizontal movement of the dish.the dish.
Elevation:Elevation: The measurement of the The measurement of the vertical movement of thevertical movement of the dish.dish.

List of Definitions Cont…List of Definitions Cont…
Right ascension:Right ascension: The distance to a point on the celestial sphere, measured The distance to a point on the celestial sphere, measured eastward from the vernal equinox along the celestial equator to the hour circle eastward from the vernal equinox along the celestial equator to the hour circle of the point and expressed in hours, minutes and seconds (where one hour of of the point and expressed in hours, minutes and seconds (where one hour of right ascension corresponds to 15° of celestial longitude).right ascension corresponds to 15° of celestial longitude).
Declination:Declination: The angular distance to a point on a celestial sphere, measured The angular distance to a point on a celestial sphere, measured north or south from the celestial equator.north or south from the celestial equator.
Right Ascension Declination

AcknowledgmentsAcknowledgments
Financial support:Financial support:• Iowa Space Grant Consortium• Professors John Lamont and Ralph Patterson III
Advising:Advising:• Dr. John P. Basart
Problem StatementProblem Statement
Conversion of satellite tracking equipment into a radio telescope at the Fick Observatory in Boone, IA
Major mechanical work completed
Majority of the electrical systems completed
Most of the software systems completed for full operation
Operating EnvironmentOperating Environment
Amplification system is to be placed outdoor where temperatures ranges from -20°F to 110°F with possibility of snow, ice and strong wind
Vulnerability to lightning which could lead to signal interference and equipment damage
Remaining part of the system will be held indoors at regular room temperature

Intended Users and UsesIntended Users and UsesIntended Users:
Faculty research in astronomy Astronomy students
Intended Uses:Intended Uses:
Radio mapping of the sky at frequency around 1420 Radio mapping of the sky at frequency around 1420 MHzMHz
Tracking celestial objectsTracking celestial objects Data collectionData collection Mapping celestial objectsMapping celestial objects

End Product Description End Product Description
408 MHz
1420 MHz
10e9 MHz
A radio telescope to be used by the ISU community that can A radio telescope to be used by the ISU community that can accurately track & record data from celestial objects withaccurately track & record data from celestial objects with remote operation capabilities.remote operation capabilities.

Ankur TandonAnkur Tandon DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

Assumptions & LimitationsAssumptions & Limitations
Assumptions:Assumptions:
1420 MHz is an appropriate frequency for the 1420 MHz is an appropriate frequency for the radio telescope.radio telescope.
Dish will pick up relevant signalsDish will pick up relevant signals
Motors and gearboxes are capable of precise Motors and gearboxes are capable of precise movementmovement

Assumptions & LimitationsAssumptions & Limitations
Limitations:Limitations:
Dish unable to be positioned to true northDish unable to be positioned to true north
Positioning accuracy dependant on motors and gearsPositioning accuracy dependant on motors and gears
Radio sources less than 2.5 degrees apart appear as Radio sources less than 2.5 degrees apart appear as one source due to beam width of dishone source due to beam width of dish
Weather conditions limit the work that can be done Weather conditions limit the work that can be done on the exterior components of the dishon the exterior components of the dish

LaTasha MabryLaTasha Mabry DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

Previous AccomplishmentsPrevious Accomplishments
Limit switches were installed to prevent the dish from Limit switches were installed to prevent the dish from exceeding its limitsexceeding its limits
The original dish was designed to operate at a different The original dish was designed to operate at a different frequency than 1420 MHz. A new waveguide and feed frequency than 1420 MHz. A new waveguide and feed horn was designed and assembled.horn was designed and assembled.
Back end receiver shipped to the manufacturer for Back end receiver shipped to the manufacturer for repairs and reinstalledrepairs and reinstalled
Remote access, which allows users to operate the dish Remote access, which allows users to operate the dish remotely remotely

Previous Accomplishments Cont..Previous Accomplishments Cont..
Motor control, tracking, and calibration software written Motor control, tracking, and calibration software written in LabVIEW.in LabVIEW.
Feedback system uses potentiometer to measure in Feedback system uses potentiometer to measure in each axis of motion.each axis of motion.
Data acquisition software written in LabVIEW.Data acquisition software written in LabVIEW.
50-pin connector installation to connect the rest of the 50-pin connector installation to connect the rest of the
system to the computer.system to the computer.

Present AccomplishmentsPresent Accomplishments
Anemometer/weather station installedAnemometer/weather station installed
Separate webcams installed to monitor dish and control Separate webcams installed to monitor dish and control panelpanel
Replaced LEDs in the motor control box front panelReplaced LEDs in the motor control box front panel
Receiver front end tested and repairedReceiver front end tested and repaired
Raster scan program completedRaster scan program completed

Present Accomplishment Cont…Present Accomplishment Cont…
Diagnosed elevation positioning sensorDiagnosed elevation positioning sensor
Analyzed pointing errors due to wind loadingAnalyzed pointing errors due to wind loading
Gearbox lubrication to prevent deteriorationGearbox lubrication to prevent deterioration
Exact blind spots of dish discoveredExact blind spots of dish discovered

Future Required ActivitiesFuture Required Activities
Design a power fault recovery system
Automate the motor control box power
Test new software with repaired receiver front and back ends
Combine all software into a web-based user interface
Upgrade to high-speed internet connection
Conduct complete system test

Eric ScharesEric Schares DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities
• ElectricalElectrical• MechanicalMechanical• SoftwareSoftware
Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

Hardware ComponentsHardware ComponentsMotor Control BoxMotor Control Box Houses circuitry needed to run the positioning system Houses circuitry needed to run the positioning system
through control room computerthrough control room computer
Receiver systemReceiver system Receives data from celestial objectsReceives data from celestial objects In need of repair this semesterIn need of repair this semester
WebcamsWebcams Allows remote monitoring of the dish system and Allows remote monitoring of the dish system and
observatoryobservatory
Weather StationWeather Station Provides live weather conditions at observatoryProvides live weather conditions at observatory Temperature, wind speed, humidity, barometric pressureTemperature, wind speed, humidity, barometric pressure
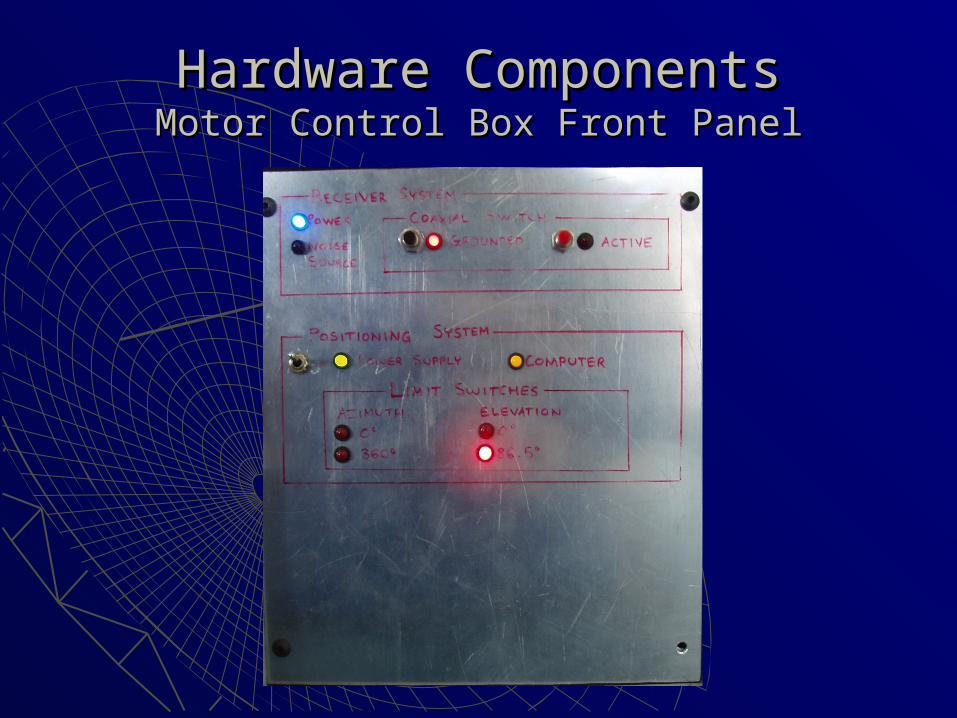
Hardware ComponentsHardware ComponentsMotor Control Box Front PanelMotor Control Box Front Panel

Hardware ComponentsHardware ComponentsMotor Control BoxMotor Control Box

Hardware ComponentsHardware ComponentsElevation PotentiometerElevation Potentiometer
Located in upper junction box at the elevation axis of rotation.
Was not giving feed back for proper elevation positions.
Actions taken• Check the potentiometer for obvious mechanical
failure.• Check the potentiometer for proper varying resistance.• Check all wiring connections.
It was determined that all parts are working correctly and wiring connections are correct on the dish. The problem is in the wiring into the building.

Support ComponentsSupport ComponentsWeb CamerasWeb Cameras
DishDish
Allows remote monitoring of dishAllows remote monitoring of dish
and surroundingsand surroundings
Safety issues, including humanSafety issues, including human
occupation and possible obstructionsoccupation and possible obstructions
Logitech Fusion

Support ComponentsSupport ComponentsWeb CamerasWeb Cameras
Control PanelControl Panel
Allows remote Allows remote
monitoring of control panelmonitoring of control panel
Allows user to see state of LEDs Allows user to see state of LEDs
Allows user to see position of power switch Allows user to see position of power switch
Logitech Communicate STX

Support ComponentsSupport ComponentsWeather StationWeather Station
Allows to accurately monitor weather conditionsAllows to accurately monitor weather conditions
Displays current temperature, humidity, Displays current temperature, humidity, barometric pressure, wind speed, and rainfallbarometric pressure, wind speed, and rainfall
Allows for proper use of the dishAllows for proper use of the dish

DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities
• ElectricalElectrical• MechanicalMechanical• SoftwareSoftware
Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary
Temur SafdarTemur Safdar

Repairs and RevisionsRepairs and RevisionsFront-endFront-end
Located on the tower, to receive 1420 MHz1420 MHz signals from the celestial objects.
Contains:•LNA (low noise amplifier)•Coaxial switch•Noise source•Directional coupler•1.42 GHz down-converter•Coaxial cable
Sends a converted signal of 70 MHz to the back- end of the receiver.

Every component was tested, to make sure the front-end is in a working condition.
A fault in the circuit of 1420 MHz1420 MHz down-converter was found, with two capacitors not connected together, which was fixed.
A 1420 MHz1420 MHz signal was input into the front-end of the receiver and a 70 MHz signal was received, which proved the proper functionality of all of the front-end components.
Repairs and RevisionsRepairs and RevisionsFront-end Cont…Front-end Cont…

Repairs and RevisionsRepairs and RevisionsBack-endBack-end
After successfully testing the front-end of the receiver system, the back-end of the receiver was tested.
The back-end of the receiver was brought back to the SSOL laboratory for testing and troubleshooting.
All the ICs in the backend were tested, which were in a working condition.
A 70 MHz70 MHz signal was input to the backend of the receiver and a signal was observed.
Work is still needed for the backend to properly respond to the commands sent by the computer.

Ron CharlesRon Charles DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities
• ElectricalElectrical• MechanicalMechanical• SoftwareSoftware
Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

Mechanical Issues Mechanical Issues Wind-LoadingWind-Loading
ObjectivesObjectives Determine expected wind-loads and resulting pointing Determine expected wind-loads and resulting pointing
errorserrors
Compare with measured pointing errors for normal Compare with measured pointing errors for normal operation of the dishoperation of the dish
Use the model to predict the effects and errors under Use the model to predict the effects and errors under abnormal (high wind speed) conditionsabnormal (high wind speed) conditions

Mechanical Issues Mechanical Issues Wind-Loading Cont…Wind-Loading Cont…
Methods ConsideredMethods Considered Wind tunnel testing using scale model or full scale Wind tunnel testing using scale model or full scale
sectionsection
Mounting load sensors or strain gauges on the dish Mounting load sensors or strain gauges on the dish surfacesurface
Theoretical CalculationsTheoretical Calculations
Method UsedMethod Used Theoretical CalculationsTheoretical Calculations

Mechanical Issues Mechanical Issues Wind-Loading Cont…Wind-Loading Cont…
Types of wind-loading consideredTypes of wind-loading considered Static: Wind-loads applied while the dish is stationaryStatic: Wind-loads applied while the dish is stationary
Dynamic: Wind-loads applied when the dish is in motion, Dynamic: Wind-loads applied when the dish is in motion, as in when tracking a satelliteas in when tracking a satellite

Mechanical Issues Mechanical Issues Wind-Loading Cont…Wind-Loading Cont…
Completed TasksCompleted Tasks Determined wind-loading for a range of wind speeds and Determined wind-loading for a range of wind speeds and
angles incident on the dish surface and their associated angles incident on the dish surface and their associated pointing errorspointing errors
Tasks to be completedTasks to be completed Obtain actual pointing differences under normal Obtain actual pointing differences under normal
operating conditions for comparisonoperating conditions for comparison Create a model to determine the correction factors to be Create a model to determine the correction factors to be
applied under moderately abnormal conditionsapplied under moderately abnormal conditions
Problems encounteredProblems encountered Not yet able to collect dish position dataNot yet able to collect dish position data

Mechanical Issues Mechanical Issues MaintenanceMaintenance
Lubrication Applied
multi-purpose grease to gears
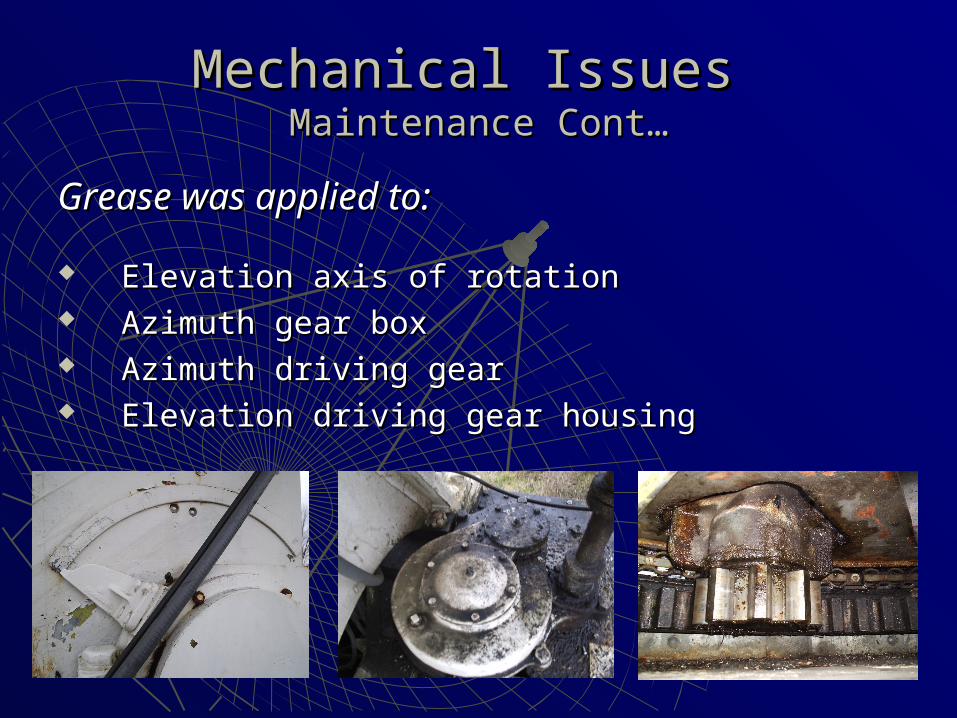
Mechanical Issues Mechanical Issues Maintenance Cont…Maintenance Cont…
Grease was applied to:Grease was applied to:
Elevation axis of rotationElevation axis of rotation Azimuth gear boxAzimuth gear box Azimuth driving gearAzimuth driving gear Elevation driving gear housingElevation driving gear housing

Parikshit AdvaniParikshit Advani DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities
• ElectricalElectrical• MechanicalMechanical• SoftwareSoftware
Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

Higher-level requirement
Raster scan program•Scan a 2D array of data points•Generate graphical results
SoftwareSoftwareRequirementsRequirements

SoftwareSoftwareRequirements Cont…Requirements Cont…
Move the dish to a desired location• Feedback voltages must be calibrated to yield actual
dish position (degrees)
Measure and record the signal intensity from the dish• Signal must be calibrated from intensity reading to W/m2
Perform dish position calibration• Measure feedback voltages at dish limits• Feedback voltage is linearly proportional to dish position
Convert celestial coordinates to absolute coordinates• Depends on time of day• Predict when a coordinate is visible

SoftwareSoftwareApproachApproach
Overall Module Diagram
Raster Scan
Celestial Coords to Elevation/Azimuth
Motor Control
Position Feedback
Receiver Communications
PCI-1200 DAQ Card
CalibrationSettings
Motor Drivers
Feedback Potentiometers
1420 MHz Receiver
Receiver Electronics
Serial Link
Software Systems Hardware Systems

Matt FischerMatt Fischer DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities
• ElectricalElectrical• MechanicalMechanical• SoftwareSoftware
Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary

SoftwareSoftwareTechnologyTechnology
LabVIEW platform chosen Supports modular approach Integrated, real-time documentation Extensive libraries included Built-in support for remote access
Bottom-up approach Basic modules first (I/O) Build more complex programs by using several basic modules

Software TechnologySoftware Technology
Example Module: Motor ControllerExample Module: Motor Controller
Front panel (user interface)

Software Technology Cont…Software Technology Cont…

Software Technology Cont…Software Technology Cont…
Connection diagramConnection diagram(program interface)(program interface)
Example Module: Motor ControllerExample Module: Motor Controller

Software ImplementationSoftware Implementation
Interface Existing Modules Together
Celestial Coordinates Conversion Receiver serial communication
Write new software modules
Pointing Correction Mapping
Document work
Software TestingSoftware Testing
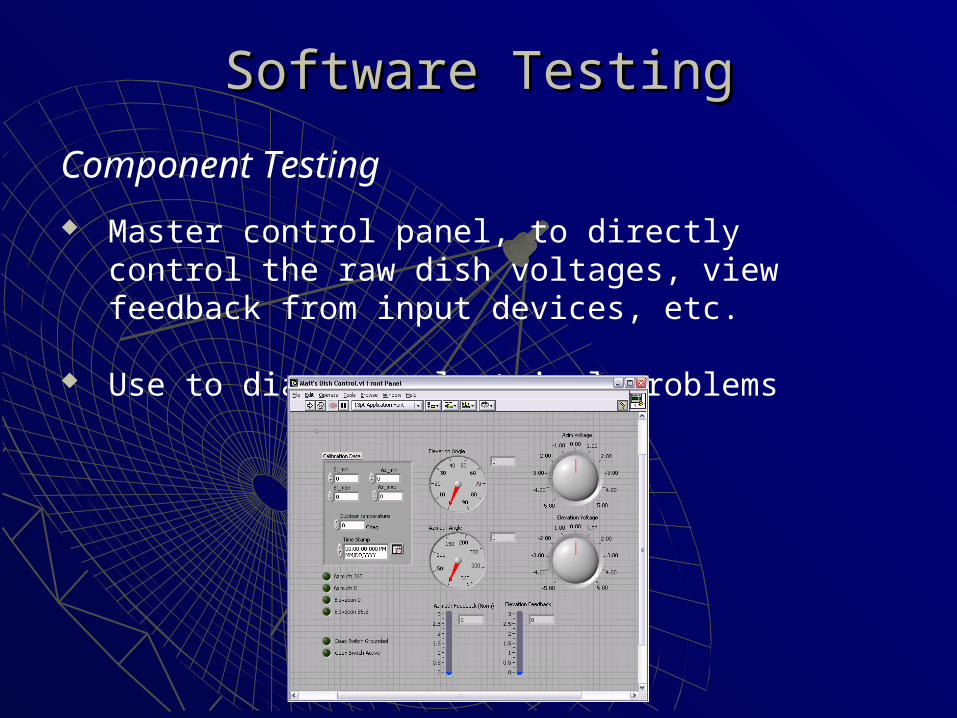
Component Testing
Master control panel, to directly control the raw dish voltages, view feedback from input devices, etc.
Use to diagnose electrical problems

Matt MooreMatt Moore
DefinitionsDefinitions AcknowledgementsAcknowledgements Problem StatementProblem Statement Operating EnvironmentOperating Environment Intended Users and UsesIntended Users and Uses End ProductEnd Product Assumptions and LimitationsAssumptions and Limitations AccomplishmentsAccomplishments Project ActivitiesProject Activities Resource RequirementsResource Requirements Lessons LearnedLessons Learned Closing SummaryClosing Summary
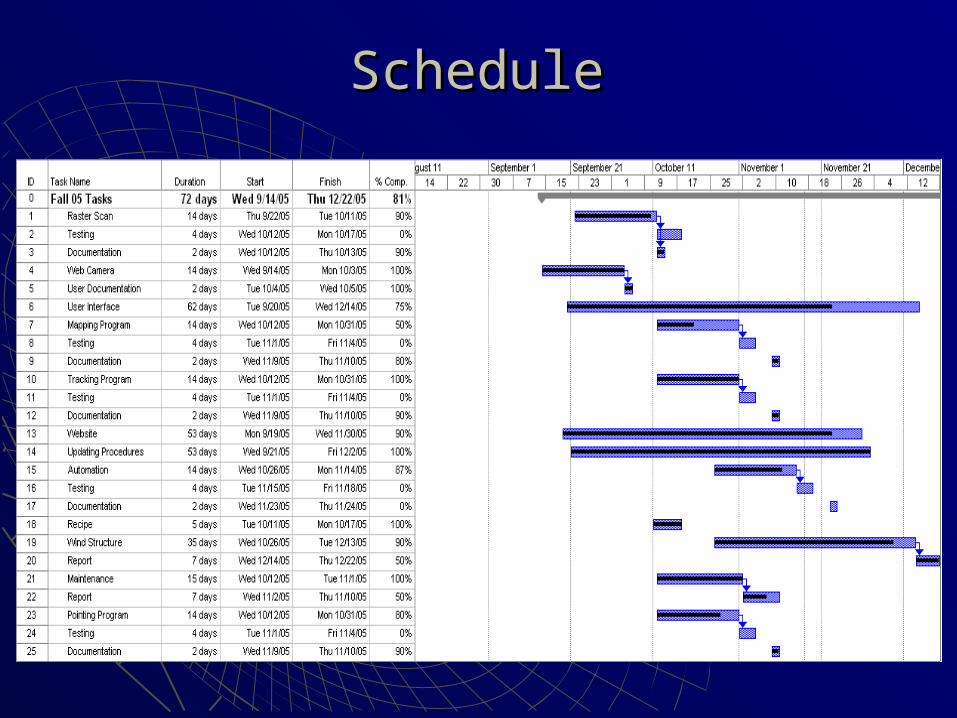
ScheduleSchedule

Personal EffortPersonal Effort
Team MemberTeam Member EstimatedEstimated To DateTo Date
Nicholas ZeitlerNicholas Zeitler 158158 101.5101.5
Eric ScharesEric Schares 124124 93.2593.25
Temur Safdar HussainTemur Safdar Hussain 123123 8686
LaTasha MabryLaTasha Mabry 112112 5050
Ankur TandonAnkur Tandon 9393 5353
Matt FischerMatt Fischer 117117 51.551.5
Matt MooreMatt Moore 7676 5252
Ron CharlesRon Charles 7979 5555
Parikshit AdvaniParikshit Advani 122122 99.599.5
TotalTotal 784784 641.75641.75

Financial BudgetFinancial Budget
EstimatedEstimated Actual costsActual costs
ScaffoldingScaffolding $150.00$150.00 N/AN/A
Grease/Grease gunGrease/Grease gun $75.00$75.00 $35.00$35.00
Weather StationWeather Station $280$280 $280$280
Web camerasWeb cameras $146.97$146.97 146.97146.97
USB hubUSB hub $15.00$15.00 $20.00$20.00
TotalTotal $671.97$671.97 $481.97$481.97

Analytical reporting on wind-loadingAnalytical reporting on wind-loading
Solve problem of water in motors and gearboxesSolve problem of water in motors and gearboxes
Perform maintenance on mechanical systems.Perform maintenance on mechanical systems.
Fall 2005 MilestonesFall 2005 MilestonesMechanicalMechanical

Convert last semester’s software to use new hardware Convert last semester’s software to use new hardware setupsetup
Add support for new hardware (anemometer & webcams)Add support for new hardware (anemometer & webcams)
Remote accessRemote access
Write/update modules to communicate with receiver via Write/update modules to communicate with receiver via serial, and testserial, and test
Write/update mapping and pointing modulesWrite/update mapping and pointing modules
User interface within the new websiteUser interface within the new website
Fall 2005 MilestonesFall 2005 MilestonesSoftwareSoftware

Solve problem with noise source and receiver powerSolve problem with noise source and receiver power
Additional Circuitry for remote operationAdditional Circuitry for remote operation
Repair the Receiver front-end/back-endRepair the Receiver front-end/back-end
Fall 2005 MilestonesFall 2005 MilestonesElectricalElectrical
Lessons LearnedLessons Learned
The importance of team communication, project The importance of team communication, project contribution, and attendance allow for completion of contribution, and attendance allow for completion of this semesters tasksthis semesters tasks
Dealing with technical problems before they Dealing with technical problems before they complicate the overall systemcomplicate the overall system
Importance of clear and concise documentationImportance of clear and concise documentation

Closing SummaryClosing Summary
This semester’s accomplishments lead the way to a fully This semester’s accomplishments lead the way to a fully
operational radio telescope. Hardware is still in non-operational radio telescope. Hardware is still in non-
working order to begin receiving signals and the current working order to begin receiving signals and the current
software will allow for data collection, pointing software will allow for data collection, pointing
corrections, and mapping celestial objects to begin.corrections, and mapping celestial objects to begin.

Questions?Questions?
SSOL: Radio Telescope Team Ongo-02c