
Spr 2015, Mar 13... ELEC 5200-001/6200-001 Lecture 8 1 ELEC 5200-001/6200-001 Computer Architecture...
35
Spr 2015, Mar Spr 2015, Mar 13 . . . 13 . . . ELEC 5200-001/6200-001 ELEC 5200-001/6200-001 Lecture 8 Lecture 8 1 ELEC 5200-001/6200-001 ELEC 5200-001/6200-001 Computer Architecture and Computer Architecture and Design Design Spring 2015 Spring 2015 Microprogramming Microprogramming (Appendix D) (Appendix D) Vishwani D. Agrawal Vishwani D. Agrawal James J. Danaher Professor James J. Danaher Professor Department of Electrical and Computer Department of Electrical and Computer Engineering Engineering Auburn University, Auburn, AL 36849 Auburn University, Auburn, AL 36849 http://www.eng.auburn.edu/~vagrawal [email protected]
-
Upload
bertina-tyler -
Category
Documents
-
view
221 -
download
1
Transcript of Spr 2015, Mar 13... ELEC 5200-001/6200-001 Lecture 8 1 ELEC 5200-001/6200-001 Computer Architecture...

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 11
ELEC 5200-001/6200-001ELEC 5200-001/6200-001Computer Architecture and DesignComputer Architecture and Design
Spring 2015Spring 2015
Microprogramming (Appendix D)Microprogramming (Appendix D)
Vishwani D. AgrawalVishwani D. AgrawalJames J. Danaher ProfessorJames J. Danaher Professor
Department of Electrical and Computer EngineeringDepartment of Electrical and Computer EngineeringAuburn University, Auburn, AL 36849Auburn University, Auburn, AL 36849
http://www.eng.auburn.edu/[email protected]

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 22
Alternatives for Control Unit (CU)Alternatives for Control Unit (CU)Hard-wired (hardware)Hard-wired (hardware)– Random logic, programmable logic array (PLA), or ROMRandom logic, programmable logic array (PLA), or ROM– FastFast– InflexibleInflexible
FirmwareFirmware– Microprogrammed or microcoded CUMicroprogrammed or microcoded CU– Control implemented like a computer (microcomputer)Control implemented like a computer (microcomputer)
MicroinstructionsMicroinstructionsMicroprogramMicroprogram
– FlexibleFlexibleSoftware-like changes to instruction set possibleSoftware-like changes to instruction set possibleCompletely different instruction sets can be emulatedCompletely different instruction sets can be emulated
– Speed limited by microcomputer memorySpeed limited by microcomputer memory

26-31 toControl
FSM
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 33
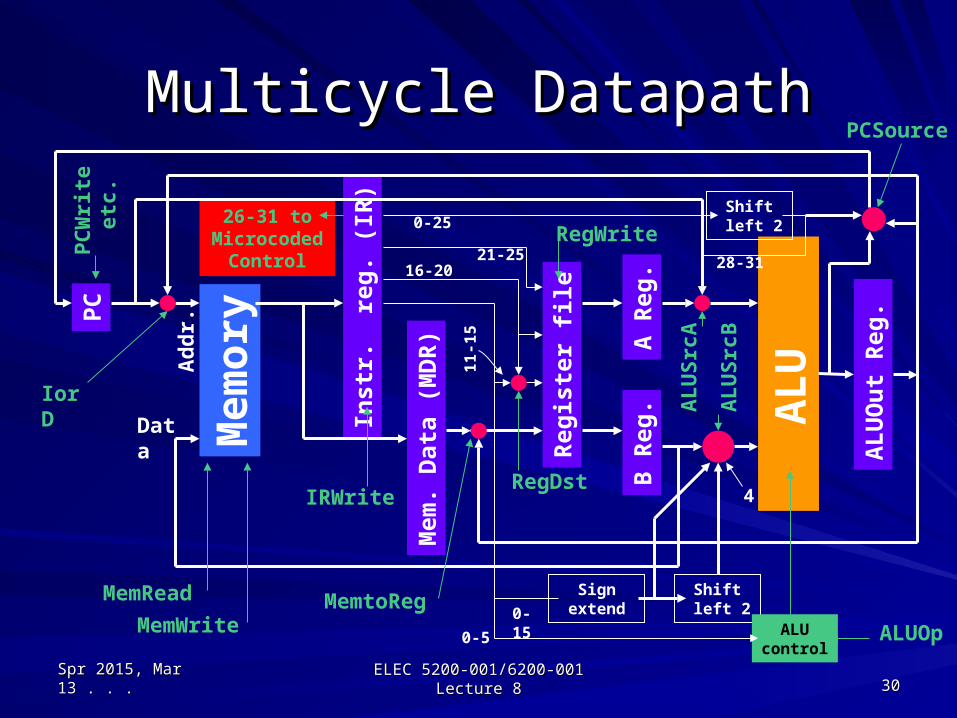
Multicycle DatapathMulticycle DatapathP
C
Inst
r.
reg
. (I
R)
Mem
. D
ata
(MD
R)
AL
UO
ut
Reg
.
A R
eg.
B R
eg.
A
LU
Reg
iste
r fi
le
Mem
ory
Ad
dr.
Data
4
Sign extend
Shift left 2
ALUcontrol
0-5
0-15
16-2021-25
IorD
MemtoReg
ALUOp
AL
US
rcB
AL
US
rcA
RegDstIRWrite
RegWrite
MemWrite
MemRead
Shift left 20-25
28-31
PCSource
PC
Wri
te e
tc.
11
-15

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 44
Multicycle Control FSMMulticycle Control FSM
Instr. decode/reg.
fetch/branch
addr.
ALU operation
Write PC on branch condition
Write memory
data
Write jump addr.
to PC
Write register
Read memory
data
Instr. fetch/
adv. PC
Compute memory
addr.
Write register
lw or sw
lw
sw
RB
J
Start
State 0 1
23
4 5
6
7
8 9
Inputs: 6 opcode bitsOutputs: 16 control signals

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 55
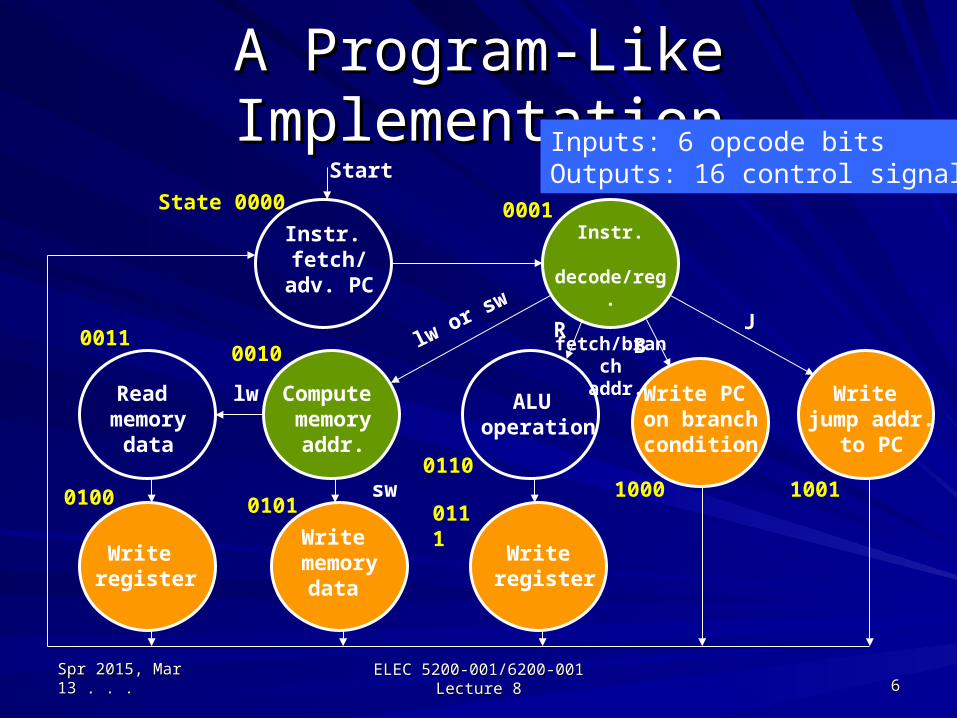
States and OutputsStates and OutputsSuppose 10 states are encoded 0000 through 1001.Suppose 10 states are encoded 0000 through 1001.State code completely determines 16 control signals State code completely determines 16 control signals (Moore machine).(Moore machine).States 0 (0000), 3 (0011) and 6 (0110)States 0 (0000), 3 (0011) and 6 (0110)
Next state ← present state + 1Next state ← present state + 1
State 1 (0001) – opcode determines next stateState 1 (0001) – opcode determines next stateState 2 (0010) for lw or swState 2 (0010) for lw or swState 6 (0110) for R-type of instructionState 6 (0110) for R-type of instructionState 8 (1000) for branch instructionState 8 (1000) for branch instructionState 9 (1001) for jump instructionState 9 (1001) for jump instruction
State 2 (0010) – opcode determines next stateState 2 (0010) – opcode determines next stateState 3 (0011) for lwState 3 (0011) for lwState 5 (0101) for swState 5 (0101) for sw
States 4 (0100), 5 (0101), 7 (0111), 8 (1000) and 9 States 4 (0100), 5 (0101), 7 (0111), 8 (1000) and 9 (1001) – next state is unconditionally 0 (0000)(1001) – next state is unconditionally 0 (0000)
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 66
A Program-Like ImplementationA Program-Like Implementation
Instr. decode/reg.
fetch/branch
addr.
ALU operation
Read memory
data
Instr. fetch/
adv. PC
lw or sw
lw
sw
RB
J
Start
State 0000 0001
00100011
0100 0101
0110
01111000 1001
Inputs: 6 opcode bitsOutputs: 16 control signals
Compute memory
addr.
Write jump addr.
to PC
Write register
Write memory
data
Write register
Write PC on branch condition

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 77
Implementing with ROMImplementing with ROM
ControlPLA or ROM
16 words
Four flip-flops
16 control signals
PLA input orROM address
6-bit opcode
State sequencer
Select one of 4 ways
16
2
4
6

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 88
ROM and State SequencerROM and State SequencerControl ROM
Sixteen18-bit words4-bit address
4-bit state flip-flops
16
2
Controlsignals to datapath
4 4
0001
MUX11 10 01 00
0000
AddrCtl go to00 st. 011 st. + 101 st.
2,6,8,910 st. 3,5
Dispatch ROM 2 Dispatch ROM 1
Adder
6
6-bitOpcode from IR
Address
Advance state4
ROM Address sw, lw, R, B or J
sw or lw
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 99
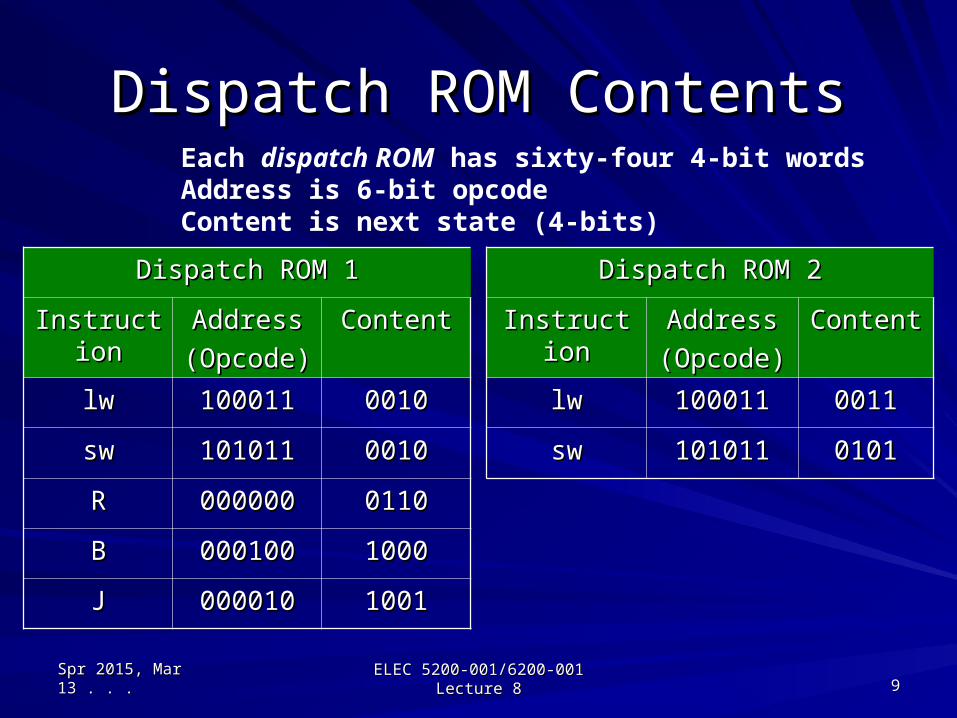
Dispatch ROM ContentsDispatch ROM Contents
Dispatch ROM 1Dispatch ROM 1
InstructionInstruction AddressAddress
(Opcode)(Opcode)
ContentContent
lwlw 100011100011 00100010
swsw 101011101011 00100010
RR 000000000000 01100110
BB 000100000100 10001000
JJ 000010000010 10011001
Each dispatch ROM has sixty-four 4-bit wordsAddress is 6-bit opcodeContent is next state (4-bits)
Dispatch ROM 2Dispatch ROM 2
InstructionInstruction AddressAddress
(Opcode)(Opcode)
ContentContent
lwlw 100011100011 00110011
swsw 101011101011 01010101

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1010
Control ROM ContentsControl ROM ContentsControl ROM has sixteen Control ROM has sixteen 18-bit words:18-bit words:– bits 0-1, AddrCtl to bits 0-1, AddrCtl to
control muxcontrol mux– bits 2-17, sixteen bits 2-17, sixteen
control signals for control signals for datapathdatapath
Address is 4-bit state of Address is 4-bit state of control machinecontrol machine
Addr.Addr. bits 17-2bits 17-2 bits 1-0bits 1-000000000 10010100000010001001010000001000 1111
00010001 00000000000110000000000000011000 0101
00100010 00000000000101000000000000010100 1010
00110011 00110000000000000011000000000000 1111
01000100 00000010000000100000001000000010 0000
01010101 00101000000000000010100000000000 0000
01100110 00000000010001000000000001000100 1111
01110111 00000000000000110000000000000011 0000
10001000 01000000101001000100000010100100 0000
10011001 10000001000000001000000100000000 0000
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1111
Microprogram: Basic IdeaMicroprogram: Basic IdeaThe control unit in a computer generates an output The control unit in a computer generates an output (sequence of control signals) for each instruction.(sequence of control signals) for each instruction.Suppose we break down each instruction into a series of Suppose we break down each instruction into a series of smaller operations (microinstructions), such as, smaller operations (microinstructions), such as, fetchfetch, , decodedecode, etc., etc.Then, implement the control unit as a smallThen, implement the control unit as a small computer computer (within the computer) that executes a sequence of (within the computer) that executes a sequence of microinstructions (microprogram) for each instruction.microinstructions (microprogram) for each instruction.M. V. Wilkes, “The Best Way to Design an Automatic M. V. Wilkes, “The Best Way to Design an Automatic Calculating Machine,” Calculating Machine,” Report of Manchester University Report of Manchester University Computer Inaugural ConferenceComputer Inaugural Conference, pp. 16-18, 1951., pp. 16-18, 1951.Reprinted in E. E. Swartzlander (editor), Reprinted in E. E. Swartzlander (editor), Computer Design Computer Design Development: Principal PapersDevelopment: Principal Papers, pp. 266-270, Rochelle , pp. 266-270, Rochelle Park, NJ: Hayden, 1976.Park, NJ: Hayden, 1976.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1212
Maurice V. WilkesMaurice V. WilkesBorn June 26, 1913, Staffordshire, UK, died November 29, 2010
1967 Turing Award citation:
Professor Wilkes Is best known as the builder and designer of the EDSAC, the first computer with an internally stored program. Built in 1949, the EDSAC used a mercury delay line memory. He is also known as the author, with Wheeler and Gill, of a volume on “Preparation of Programs for Electronic Digital Computers” in 1951, in which program libraries were effectively introduced.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1313
Microcoded Control UnitMicrocoded Control Unit
Sixteen18-bit words4-bit address
4-bit state flip-flops
16
2
Controlsignals to datapath
4 4
0001
MUX11 10 01 00
0000
AddrCtl
Dispatch ROM 2 Dispatch ROM 1
Adder
6
Opcode from IR
Address
Microcodememory
μPC
Address select logic
Microcode word
Sequencing field
lw or sw sw, lw, R, B or J
ROM address

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1414
Implementing the IdeaImplementing the IdeaUse a memory type implementation for control Use a memory type implementation for control unit.unit.Create a software infrastructure to automatically Create a software infrastructure to automatically translate instructions into memory data translate instructions into memory data (microcode):(microcode):
Microinstructions – define a machine language in which Microinstructions – define a machine language in which instructions can be describedinstructions can be describedMicroprogram – an instruction described as a sequence of Microprogram – an instruction described as a sequence of microinstructionsmicroinstructionsMicroassembler – converts microprogram to (binary) Microassembler – converts microprogram to (binary) microcodemicrocode
Is there a micro-compiler?Is there a micro-compiler?

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1515
MicroprogrammingMicroprogramming
A microinstruction set is defined.A microinstruction set is defined.
To program the control of a computer for an To program the control of a computer for an instruction set, a programmer writes a instruction set, a programmer writes a microprogram for each machine instruction.microprogram for each machine instruction.
Each micrprogram is converted into Each micrprogram is converted into microcode, specific to the datapath microcode, specific to the datapath hardware, by a microassembler and the hardware, by a microassembler and the entire microcode is loaded in the microcode entire microcode is loaded in the microcode memory of the control unit (CU).memory of the control unit (CU).

Breaking Up MIPS InstructionsBreaking Up MIPS Instructions
R-type instruction:R-type instruction:FetchFetch
DecodeDecode
ALU operationALU operation
Write register Write register
lw:lw:FetchFetch
DecodeDecode
Memory address computationMemory address computation
Read memoryRead memory
Write registerWrite register
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1616

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1717
Microinstructions for MIPS ISAMicroinstructions for MIPS ISAFetchFetch fetch instructionfetch instruction
DecodeDecode decode instruction, read decode instruction, read registers, registers, calculate branch addresscalculate branch address
RegWrRegWr write registerwrite register
LWSW1LWSW1 compute memory addresscompute memory address
LW2LW2 memory readmemory read
SW2SW2 memory writememory write
R1R1 register type executionregister type execution
BEQ1BEQ1 branch executionbranch execution
JUMP1JUMP1 jump executionjump execution
Let’s Construct MIPS InstructionsLet’s Construct MIPS Instructions
R-type instruction:R-type instruction:FetchFetch
DecodeDecode
R1R1
RegWrRegWr
lw:lw:FetchFetch
DecodeDecode
LWSW1LWSW1
LW2LW2
RegWrRegWr
sw:sw:FetchFetch
DecodeDecode
LWSW1LWSW1
SW2SW2
Branch:Branch:FetchFetch
DecodeDecode
BEQ1BEQ1
Jump:Jump:FetchFetch
DecodeDecode
JUMP1JUMP1Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1818

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 1919
Microinstruction FormatMicroinstruction FormatJust one instruction with seven argumentsJust one instruction with seven argumentsA label or name for control state(s), e.g., Fetch, MEM1, etc. A label or name for control state(s), e.g., Fetch, MEM1, etc. Seven arguments and their possible values:Seven arguments and their possible values:– ALU controlALU control add, subtract or funct. codeadd, subtract or funct. code # result to ALUOut# result to ALUOut– SRC1SRC1 PC or APC or A– SRC2SRC2 B, 4, extend or extend-shiftB, 4, extend or extend-shift– Reg. controlReg. control ReadRead # read two reg. specified by IR into A # read two reg. specified by IR into A
and Band BWrite ALUWrite ALU # write ALUOut to register file# write ALUOut to register fileWrite MDRWrite MDR # register file ← MDR# register file ← MDR
– MemoryMemory Read PCRead PC # IR # IR ← ← M[ PC ]M[ PC ]Read ALURead ALU # MDR ← M[ ALUOut ]# MDR ← M[ ALUOut ]Write ALUWrite ALU # M[ ALUOut ] ← B# M[ ALUOut ] ← B
– PCWritePCWrite ALUALU # write PC from ALU# write PC from ALUALU cond.ALU cond. # If zero = 1, PC ← ALUOut# If zero = 1, PC ← ALUOutJump addr.Jump addr. # # PC ← jump addressPC ← jump address
– Sequencing Seq # choose next μInst. Sequentiallyfetch # go to first μInst. to begin new
instr.Dispatch i # use Dispatch ROM i, i = 1 or
2
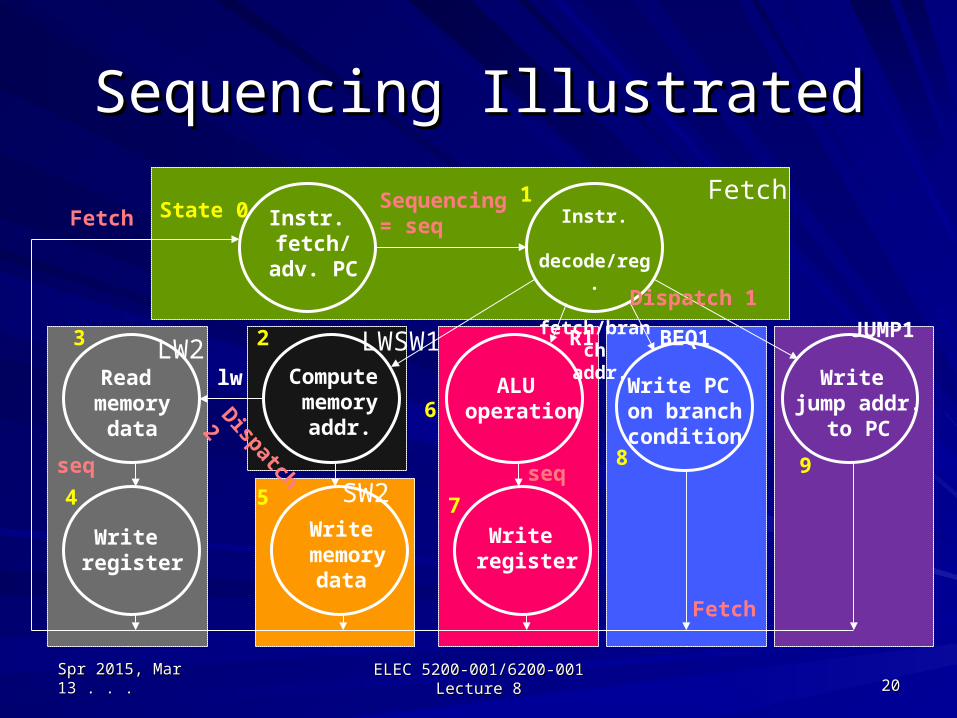
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2020
Sequencing IllustratedSequencing Illustrated
Instr. decode/reg.
fetch/branch
addr.
ALU operation
Write PC on branch condition
Write memory
data
Write jump addr.
to PC
Write register
Read memory
data
Instr. fetch/
adv. PC
Compute memory
addr.
Write register
lw
R1 BEQ1 JUMP1
State 01
23
4 5
6
7
8 9
Sequencing= seq
Dispatch 1
Dispatch 2
seq seq
Fetch
Fetch Fetch
LW2
SW2
LWSW1
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2121
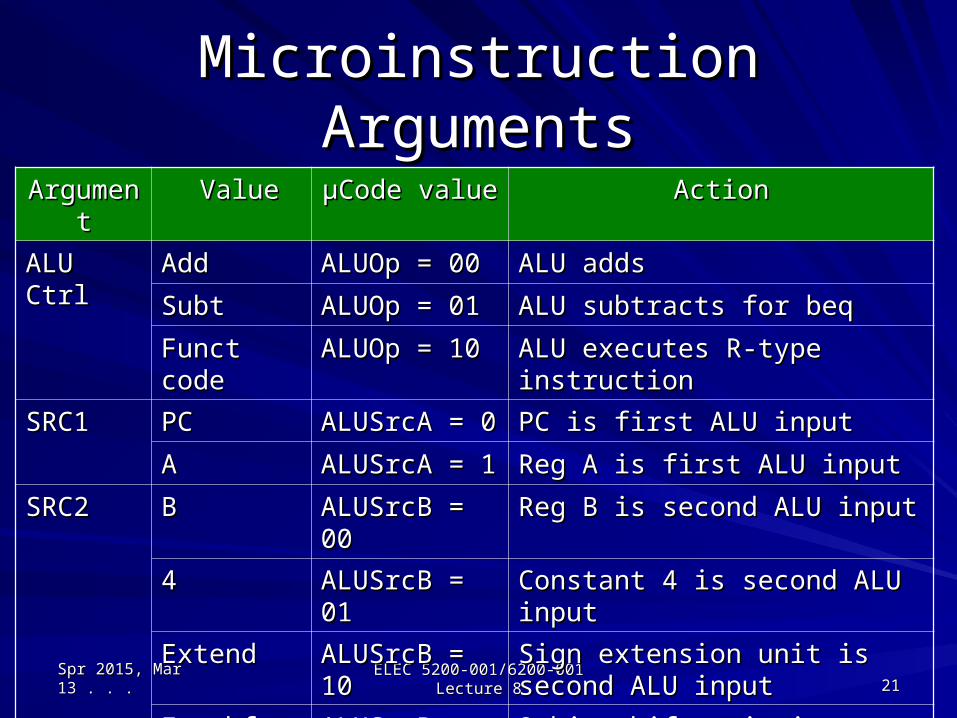
Microinstruction ArgumentsMicroinstruction Arguments
ArgumentArgument ValueValue μμCode valueCode value ActionAction
ALU CtrlALU Ctrl AddAdd ALUOp = 00ALUOp = 00 ALU addsALU adds
SubtSubt ALUOp = 01ALUOp = 01 ALU subtracts for beqALU subtracts for beq
Funct codeFunct code ALUOp = 10ALUOp = 10 ALU executes R-type instructionALU executes R-type instruction
SRC1SRC1 PCPC ALUSrcA = 0ALUSrcA = 0 PC is first ALU inputPC is first ALU input
AA ALUSrcA = 1ALUSrcA = 1 Reg A is first ALU inputReg A is first ALU input
SRC2SRC2 BB ALUSrcB = 00ALUSrcB = 00 Reg B is second ALU inputReg B is second ALU input
44 ALUSrcB = 01ALUSrcB = 01 Constant 4 is second ALU inputConstant 4 is second ALU input
ExtendExtend ALUSrcB = 10ALUSrcB = 10 Sign extension unit is second ALU Sign extension unit is second ALU inputinput
ExtshftExtshft ALUSrcB = 11ALUSrcB = 11 2-bit shift unit is second ALU input2-bit shift unit is second ALU input
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2222
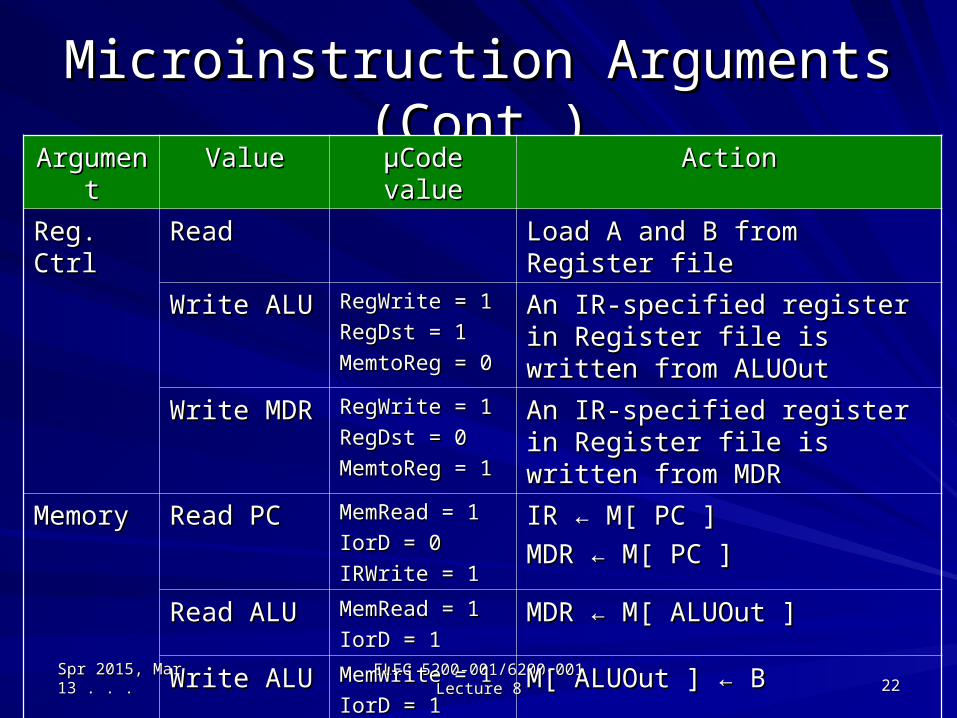
Microinstruction Arguments (Cont.)Microinstruction Arguments (Cont.)ArgumentArgument ValueValue μμCode valueCode value ActionAction
Reg. CtrlReg. Ctrl ReadRead Load A and B from Register fileLoad A and B from Register file
Write ALUWrite ALU RegWrite = 1RegWrite = 1
RegDst = 1RegDst = 1
MemtoReg = 0MemtoReg = 0
An IR-specified register in An IR-specified register in Register file is written from Register file is written from ALUOutALUOut
Write MDRWrite MDR RegWrite = 1RegWrite = 1
RegDst = 0RegDst = 0
MemtoReg = 1MemtoReg = 1
An IR-specified register in An IR-specified register in Register file is written from MDRRegister file is written from MDR
MemoryMemory Read PCRead PC MemRead = 1MemRead = 1
IorD = 0IorD = 0
IRWrite = 1IRWrite = 1
IR ← M[ PC ]IR ← M[ PC ]
MDR ← M[ PC ]MDR ← M[ PC ]
Read ALURead ALU MemRead = 1MemRead = 1
IorD = 1IorD = 1MDR ← M[ ALUOut ]MDR ← M[ ALUOut ]
Write ALUWrite ALU MemWrite = 1MemWrite = 1
IorD = 1IorD = 1M[ ALUOut ] ← BM[ ALUOut ] ← B

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2323
Microinstruction Arguments (Cont.)Microinstruction Arguments (Cont.)FieldField μμInstr. valueInstr. value μμCode valueCode value ActionAction
PC Write PC Write CtrlCtrl
ALUALU PCSource = 00PCSource = 00
PCWrite = 1PCWrite = 1Register file loads A and BRegister file loads A and B
ALUOut-ALUOut-condcond
PCSource = 01PCSource = 01
PCWriteCond = 1PCWriteCond = 1An IR-specified register in An IR-specified register in Register file is written from Register file is written from ALUOutALUOut
Jump Jump addressaddress
PCSource = 10PCSource = 10
PCWrite = 1PCWrite = 1An IR-specified register in An IR-specified register in Register file is written from MDRRegister file is written from MDR
SequencSequencinging
SeqSeq AddrCtl = 11AddrCtl = 11 Choose next Choose next μμInstr. sequentiallyInstr. sequentially
FetchFetch AddrCtl = 00AddrCtl = 00 Go to first Go to first μμInstr.Instr. to begin new to begin new instructioninstruction
Dispatch 1Dispatch 1 AddrCtl = 01AddrCtl = 01 Use Dispatch ROM 1Use Dispatch ROM 1
Dispatch 2Dispatch 2 AddrCtl = 10AddrCtl = 10 Use Dispatch ROM 2Use Dispatch ROM 2

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2424
Microinstruction FetchMicroinstruction Fetch
Label ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.ctrl. ctrl. ctrl.
Fetch Add PC 4 Read PC ALU SeqDecode Add PC ExtShft Read Dispatch 1
Microassembler produces the following microcode:00 0 01 0 0 0 1 0 1 0 00 1 0 1100 0 11 0 0 0 0 0 0 0 00 0 0 01
AL
UO
p
AL
US
rcA
AL
US
rcB
Reg
Wri
teR
egD
stM
emto
Reg
Mem
Rea
dIo
rDIR
Wri
teM
emW
rite
PC
So
urc
eP
CW
rite
PC
Wri
teC
on
d
Ad
drc
tl

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2525
Microprogram for lw and swMicroprogram for lw and sw
Label ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.ctrl. ctrl. ctrl.
LWSW1 Add A Extend Dispatch 2 LW2 Read ALU SeqRegWr Write MDR Fetch SW2 Write ALU Fetch
Microprogram consists of four microinstructions.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2626
Microprogram for R-Type InstructionMicroprogram for R-Type Instruction
Label ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.ctrl. ctrl. ctrl.
R1 Funct code A B SeqRegWr Write ALU Fetch
Go to next μInstr.Go to μInstr. Fetch
Microprogram consists of two microinstructions.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2727
Microprogram for beq InstructionMicroprogram for beq Instruction
Label ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.ctrl. ctrl. ctrl.
BEQ1 Subt A B ALUOut-cond Fetch
If (zero) then PC ← ALUOut Go to μInstr. Fetch
Microprogram consists of one microinstruction.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2828
Microprogram for jump InstructionMicroprogram for jump Instruction
Label ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.ctrl. ctrl. ctrl.
JUMP1 Jump address Fetch
Microprogram consists of one microinstruction.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 2929
μμProgram for Multi-Cycle CUProgram for Multi-Cycle CULabel ALU SRC1 SRC2 Reg. Mem. PCWrite Seq.
ctrl. ctrl. ctrl.
Fetch Add PC 4 Read PC ALU SeqDecode1 Add PC ExtShft Read Disp. 1
LWSW1 Add A Extend Disp. 2LW2 Read ALU SeqRegWr Write MDR FetchSW2 Write ALU Fetch
R1 FntCd. A B SeqRegWr Write ALU Fetch
BEQ1 Subt A B ALUOut-cond Fetch
JUMP1 Jump address Fetch
26-31 toMicrocoded
Control
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3030
Multicycle DatapathMulticycle DatapathP
C
Inst
r.
reg
. (I
R)
Mem
. D
ata
(MD
R)
AL
UO
ut
Reg
.
A R
eg.
B R
eg.
A
LU
Reg
iste
r fi
le
Mem
ory
Ad
dr.
Data
4
Sign extend
Shift left 2
ALUcontrol
0-5
0-15
16-2021-25
IorD
MemtoReg
ALUOp
AL
US
rcB
AL
US
rcA
RegDstIRWrite
RegWrite
MemWrite
MemRead
Shift left 20-25
28-31
PCSource
PC
Wri
te e
tc.
11
-15
Microcode OperationMicrocode Operation
μμPC is always initialized to 0000PC is always initialized to 0000
Load starting instruction address in PCLoad starting instruction address in PC
Clock control and datapathClock control and datapath
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3131

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3232
How Microcode WorksHow Microcode Works
Sixteen18-bit words
4-bit address
0000
16
11
clk 1: SetDatapathfor Fetch
4 4
0001
MUX11 10 01 00
0000
AddrCtl
Dispatch ROM 2 Dispatch ROM 1
Adder
6
Opcode from IRIn clk 2
Address
Microcodememory
μPC
Address select logic
Sequencing field
lw or sw sw, lw, R, B or J
ROM address
0001 in clk 2

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3333
Multicycle Control FSMMulticycle Control FSM
Instr. decode/reg.
fetch/branch
addr.
ALU operation
Write PC on branch condition
Write memory
data
Write jump addr.
to PC
Write register
Read memory
data
Instr. fetch/
adv. PC
Compute memory
addr.
Write register
lw or sw
lw
sw
RB
J
Start
State 0 1
23
4 5
6
7
8 9
Inputs: 6 opcode bitsOutputs: 16 control signals
Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3434
SummarySummaryHard-wired control:Hard-wired control: A finite state machine A finite state machine implemented typically using programmable logic implemented typically using programmable logic array (PLA) or random logic.array (PLA) or random logic.Microinstruction:Microinstruction: A one-clock instruction that A one-clock instruction that asserts a set of control signals to the datapath and asserts a set of control signals to the datapath and specifies what microinstruction to execute next.specifies what microinstruction to execute next.Microprogram:Microprogram: A sequence of microinstructions A sequence of microinstructions that implements a multicycle (or single cycle) that implements a multicycle (or single cycle) instruction.instruction.Microcode:Microcode: Machine code of a microprogram, Machine code of a microprogram, generally produced by a generally produced by a microassemblermicroassembler..Microprogrammed or microcoded control:Microprogrammed or microcoded control: A A method of specifying control that uses microcode method of specifying control that uses microcode rather than a finite state machine.rather than a finite state machine.

Spr 2015, Mar 13 . . .Spr 2015, Mar 13 . . . ELEC 5200-001/6200-001 Lecture 8ELEC 5200-001/6200-001 Lecture 8 3535
Further on MicroprogrammingFurther on MicroprogrammingPreceding discussion is based on:Preceding discussion is based on:
D. A. Patterson and J. L. Hennessey, D. A. Patterson and J. L. Hennessey, Computer Organization and Computer Organization and Design, Second EditionDesign, Second Edition, San Francisco: Morgan-Kaufman, 1998, , San Francisco: Morgan-Kaufman, 1998, Chapter 5, pp. 399-410.Chapter 5, pp. 399-410.
Terms “microcomputer”, “microarchitecture” and Terms “microcomputer”, “microarchitecture” and “micropipeline” are not related to microprogramming.“micropipeline” are not related to microprogramming.Nanoprogramming: Two levels of microprogramming Nanoprogramming: Two levels of microprogramming – a “recursive” control:– a “recursive” control:
Nanodata Corp., Nanodata Corp., QM-1 Hardware Level Users ManualQM-1 Hardware Level Users Manual, 2, 2ndnd Ed., Ed., Williamsville, NY, 1972.Williamsville, NY, 1972.J. P. Hayes, J. P. Hayes, Computer Architecture and OrganizationComputer Architecture and Organization, Section , Section 4.4.3, NY: McGraw-Hill, 1978.4.4.3, NY: McGraw-Hill, 1978.
Virtual machines: Any program can be run on any Virtual machines: Any program can be run on any instruction set using an interpreter. Example, Java.instruction set using an interpreter. Example, Java.


















