Space Robotics and Autonomy - University of Surrey · · 2018-01-29Space Robotics and Autonomy...
19
Space Robotics and Autonomy Research at DFKI Dr.-Ing. Jakob Schwendner Robotics Innovation Center (RIC) Director: Prof. Dr. Frank Kirchner German Research Center for Artificial Intelligence (DFKI)
Transcript of Space Robotics and Autonomy - University of Surrey · · 2018-01-29Space Robotics and Autonomy...

Space Robotics and Autonomy
Research at DFKI
Dr.-Ing. Jakob Schwendner
Robotics Innovation Center (RIC) Director: Prof. Dr. Frank Kirchner
German Research Center for Artificial Intelligence (DFKI)

German Research Center for Artificial Intelligence DFKI
Kaiserslautern Saarbrücken
Berlin
Bremen
Darmstadt
• Founded in 1988
• Non-profit private research institute
• „Center of Excellence“ for application-oriented research
• Focus on AI, ICT, robotics
• ~ 450 researchers (2012)
• Four locations in Germany
• Robotics Innovation Center Bremen („Space Cluster“)

Search&Rescue
DFKI Robotics Innovation Center (RIC)
Space Robotics • Founded in 2006
• Interdisciplinary staff of ~ 100 scientists
• Research in Robotics & AI
• Funding through BMWI/DLR, BMBF, EU SPACE, ESA
Underwater
Telemanipulation Mobile Manipulation

DFKI - Robotics Innovation Center
EU Project FASTER – Forward Acquisition of Soil and Terrain data for Exploration Rover
Robotic devices (mobile scout rover, miniaturized soil sensor) for efficient in-situ acquisition of soil and terrain properties on planetary surfaces.
Allow exploration rover (e.g. Exomars) to move FASTER and safer

EU Project MOONWALK Astronaut – Robot team Robotic support for EVA Man-machine interface Earth analogue simulations
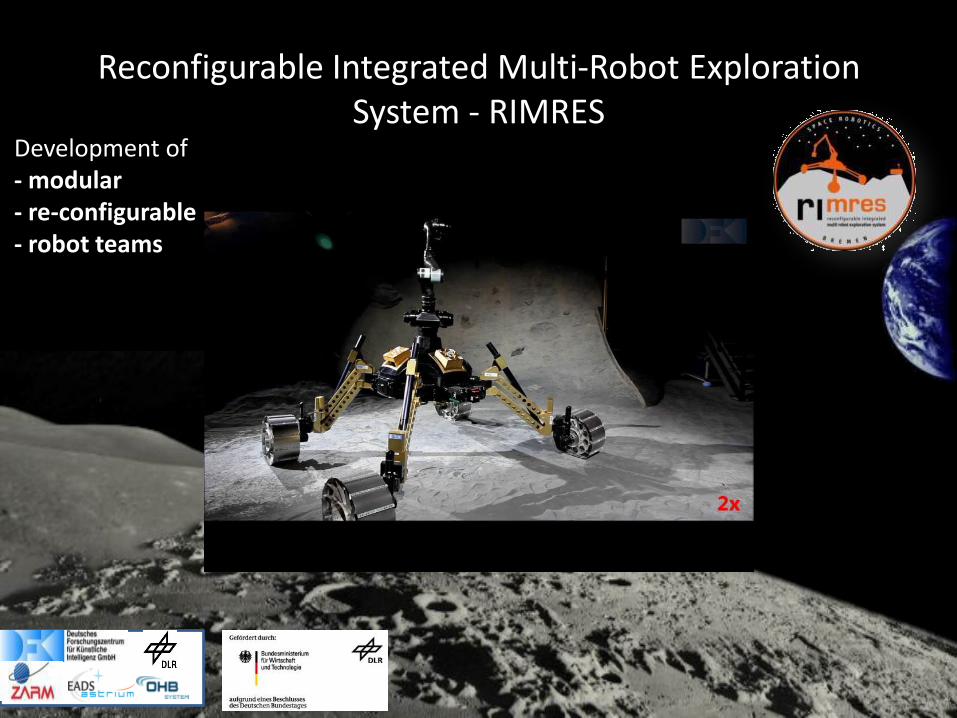
Reconfigurable Integrated Multi-Robot Exploration System - RIMRES
Development of - modular - re-configurable - robot teams


iMoby - Intelligent Mobility • Navigation on Leg-Wheel hybrid
• Robust and Flexible Navigation Solutions
• Embodied Localisation and Mapping




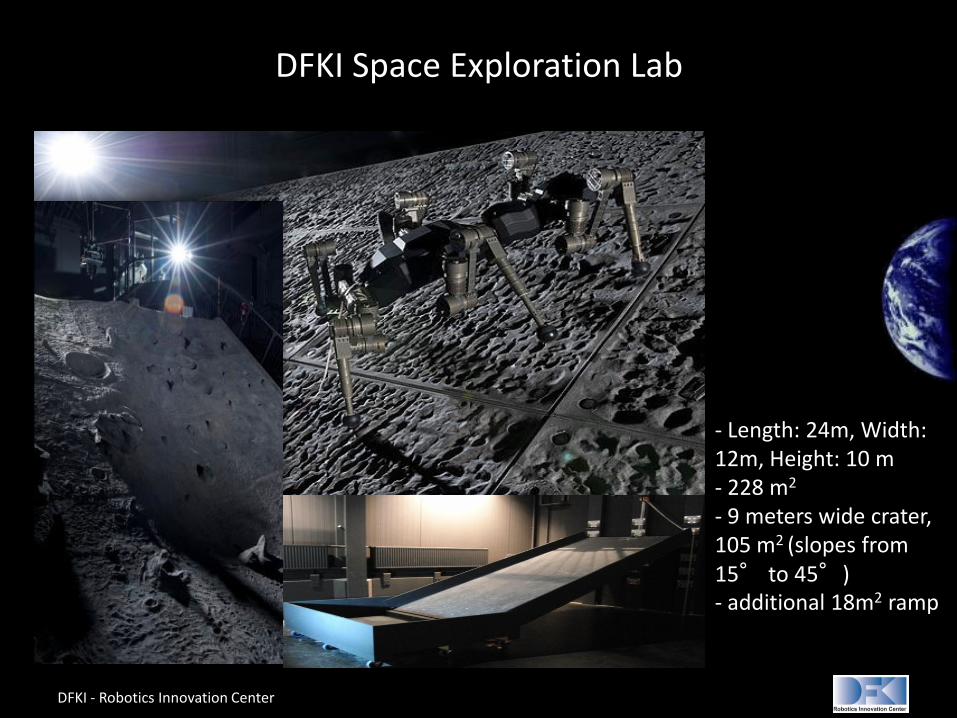
DFKI Space Exploration Lab
DFKI - Robotics Innovation Center
- Length: 24m, Width: 12m, Height: 10 m - 228 m2 - 9 meters wide crater, 105 m2 (slopes from 15° to 45°) - additional 18m2 ramp

Robotic Space Exploration
Search & Rescue
Rehabilitation
Maritime Ressources
Examples for terrestrial spin-outs
Exploration Rover Support Shuttle
Base-Camps Control Center
Co-operation (Semi-)autonomous Exploration
Logic Chain
Innovative MMI
Trans TerrA- Transfer to Terrestrial Applications

New Mission Challenges
LRO images - Robinson et al.
Craters, Rock-faces and Caves
Sample Return Orbital Servicing
Human/Robot Teams
MOONWALK
NASA Astrium

New Mission Challenges
ESA
Space Habitats Subsurface Ocean
NASA
Resource Utilisation
NASA
• Complex Missions -> Complex Systems
• Managing Complexity
• Modularity in Software and Hardware
• Component based Software
• Mapping on distributed Hardware
• Model based run-time execution and fault handling
Challenges in Autonomy
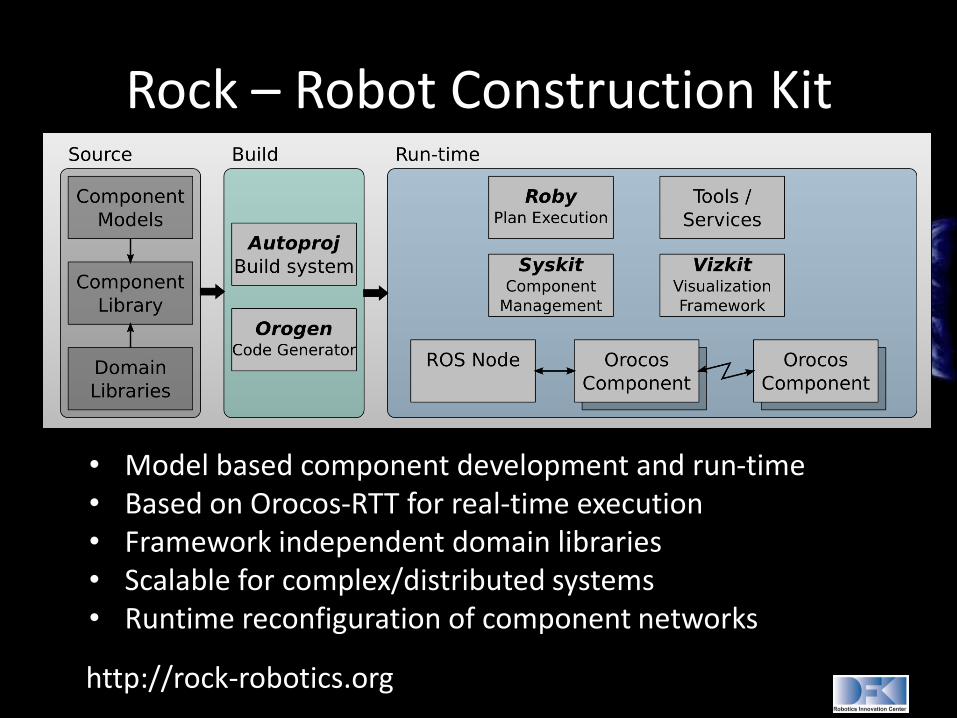
Rock – Robot Construction Kit
• Model based component development and run-time • Based on Orocos-RTT for real-time execution • Framework independent domain libraries • Scalable for complex/distributed systems • Runtime reconfiguration of component networks
http://rock-robotics.org

Thank you for your attention!
Contact:
Dr.-Ing. Jakob Schwendner
DFKI Robotics Innovation Center (RIC)
Robert-Hooke Str. 5
28359 Bremen (Germany)
0049 421 17845 4120