The Autonomous World of Marine Robotics - Carlo … 1! The Autonomous World of Marine Robotics...
8
1 The Autonomous World of Marine Robotics Autonomy is making headway in a new generation of surface and submersible robots. By John Edwards July 17, 2014 Surface and submersible robots allow humans to explore the ocean in a variety of innovative ways, lowering costs, improving efficiency and reducing the risks of marine operations. And marine robotics sailing toward its ultimate goal: full autonomy. An emerging generation of systems are now being designed to operate independently and make on-the-spot decisions with no direct human control. Full autonomy for unmanned marine robots is an important trend, but the technology’s practicality varies across different platforms, says Heather James, chairwoman of the Maritime Advisory Committee (MAC) of the Arlington, Va.-based Association for Unmanned Vehicle Systems International (AUVSI). James believes autonomy will arrive in stages, beginning with underwater exploration vehicles. “Autonomous unmanned vehicles (AUVs) will be used at all depths for search and survey while
Transcript of The Autonomous World of Marine Robotics - Carlo … 1! The Autonomous World of Marine Robotics...

1
The Autonomous World of Marine Robotics
Autonomy is making headway in a new generation of surface and submersible robots.
By John Edwards
July 17, 2014
Surface and submersible robots allow humans to explore the ocean in a variety of innovative ways, lowering costs, improving efficiency and reducing the risks of marine operations.
And marine robotics sailing toward its ultimate goal: full autonomy. An emerging generation of systems are now being designed to operate independently and make on-the-spot decisions with no direct human control.
Full autonomy for unmanned marine robots is an important trend, but the technology’s practicality varies across different platforms, says Heather James, chairwoman of the Maritime Advisory Committee (MAC) of the Arlington, Va.-based Association for Unmanned Vehicle Systems International (AUVSI).
James believes autonomy will arrive in stages, beginning with underwater exploration vehicles. “Autonomous unmanned vehicles (AUVs) will be used at all depths for search and survey while

2
remotely operated vehicles (ROVs) will continue to be the workhorses for the recovery of objects of interest or objects that are lost beneath the sea [and] have been located,” she says.
James says the risks are much higher for autonomous surface vehicles than their underwater counterparts. “The operating environment changes much more quickly [on the surface], and an incorrect autonomous action can lead to collisions with other vessels with the potential to severely damage or even sink both manned and unmanned vessels,” she explains.
MIT Seaswarm System
Autonomous marine robots are being designed in an almost endless number of shapes and sizes. At the Massachusetts Institute of Technology (MIT), researchers are developing an autonomous ocean-skimming and oil removal technology that uses large numbers of tiny autonomous robots. The Seaswarm system consists of a swarm of nanotechnology vehicles that communicate their location wirelessly to create an organized system for oil collection that can work continuously without human support.
“The aim of the project is to find an autonomous, digital controlled system to clean oceans from oil spills in an efficient, cost-effective way,” says Carlo Ratti, director of MIT’s Senseable City Laboratory in

3
Cambridge, Mass. “Traditional systems are based on large, centralized vessels; robotization allows swarms of smaller units.” “The robots communicate their location through GPS and Wi-Fi to create an organized and autonomous system,” Ratti says. Because they are smaller than the commercial skimmers attached to large fishing vessels, they are able to navigate themselves into hard to reach places, such as estuaries and coastlines. “Seaswarm works by detecting the edge of a spill and moving inward until it has removed the oil from a current site before joining other vehicles that are still cleaning,” Ratti says. The oil is “digested” locally so that Seaswarm does not need to make repeated trips back to shore, which would dramatically slow collection time. The system’s nanomaterial, patented at MIT, can absorb up to 20 times its weight in oil. Seaswarm uses a photovoltaic powered conveyor belt made of a thin nanowire mesh to propel itself and collect oil. The current prototype system it is not yet commercially available, but Ratti hopes the technology will eventually play an important role in protecting marine and coastal environments. Hull Crawler
SeaRobotics, a Stuart, Fla., company that specializes in producing systems designed to meet challenging marine environment tasks, has developed an autonomous robot to keep ship hulls in top condition. The HullBUG (Hull Bio-inspired Underwater Grooming) is a hull-crawling robot designed for proactive vessel grooming and frequent light cleaning tasks. “Ship hull efficiency and the associated fuel cost savings and reduction in environmental impact is receiving considerable attention by the shipping industry as well as the regulatory groups such as the International Maritime Organization,” says SeaRobotics president Don Darling.

4
HullBUG is a small autonomous vehicle weighing 30 to 40 kg that attaches to a vessel’s hull and performs a gentle cleaning function. Embedded computers perform navigation and sensing tasks to allow the grooming of most of a ship’s hull. The system can be attached to ferrous, non-ferrous and fiberglass hulls. HullBUG’s proactive grooming allows a ship’s hull to be operated in clean state. Clean hulls operate more efficiently, Darling notes, reducing fuel cost, decreasing green house gas emission, and reducing the transport of aquatic invasive species that like to hitch a ride to locations where they can wreck havoc. The zebra mussel, for example, a mollusk native to the lakes of southern Russia, is already clogging boat engines and water intake pipes in Lake Erie and other U.S. bodies of water. “Military ships, especially combatants, can spend long periods of time in port,” Darling says. “Fouling is heavy during these periods.” Conventional cleaning processes require the use of environmentally unfriendly biocide-based anti-fouling coatings. “Navy studies have suggested the use of HullBUG ... would reduce fuel costs, reduce the environmental impact of the fleet and potentially enable biocide-free coatings,” Darling says.

5
HullBUG’s development was funded by the U.S. Navy Office of Naval Research (ONR). Darling says SeaRobotics is currently engaged in discussions with commercial shipping, oil and gas exploration and nuclear and conventional power generation organizations. “HullBUG will play a role in the improved environmental footprint of the shipping industry in the coming years,” he predicts. Autonomous Sub Tracker
Designed to perform like an underwater bloodhound, an AUV developed by Leidos, a Reston, Va.-based engineering company, is soon to begin tracking quiet-running, diesel-electric submarines over thousands of miles of ocean depths for months at a time and with only minimal human input. The system, currently under construction, is scheduled to begin sailing its first test runs sometime in 2015. Dubbed an Autonomous Continuous Trail Unmanned Vessel (ACTUV), the robot sub was developed under a Defense Advanced Research Project Agency (DARPA) program originally created for the design, development and construction of an anti-submarine vessel. The DARPA program also called for the development of a vehicle that would sail without any humans on board. By eliminating people, the vessel’s designers were able to create exterior and interior design spaces without regard for crew support. “Most unmanned marine robots are controlled remotely with a person in the loop managing all ship and mission functions,” says David Antanitus, senior capture manager in Leidos’ Surveillance and Reconnaissance Group. “ACTUV is designed to be completely autonomous, and while there is the capability of having a person in the loop with ACTUV, autonomous operations is the norm.”
6
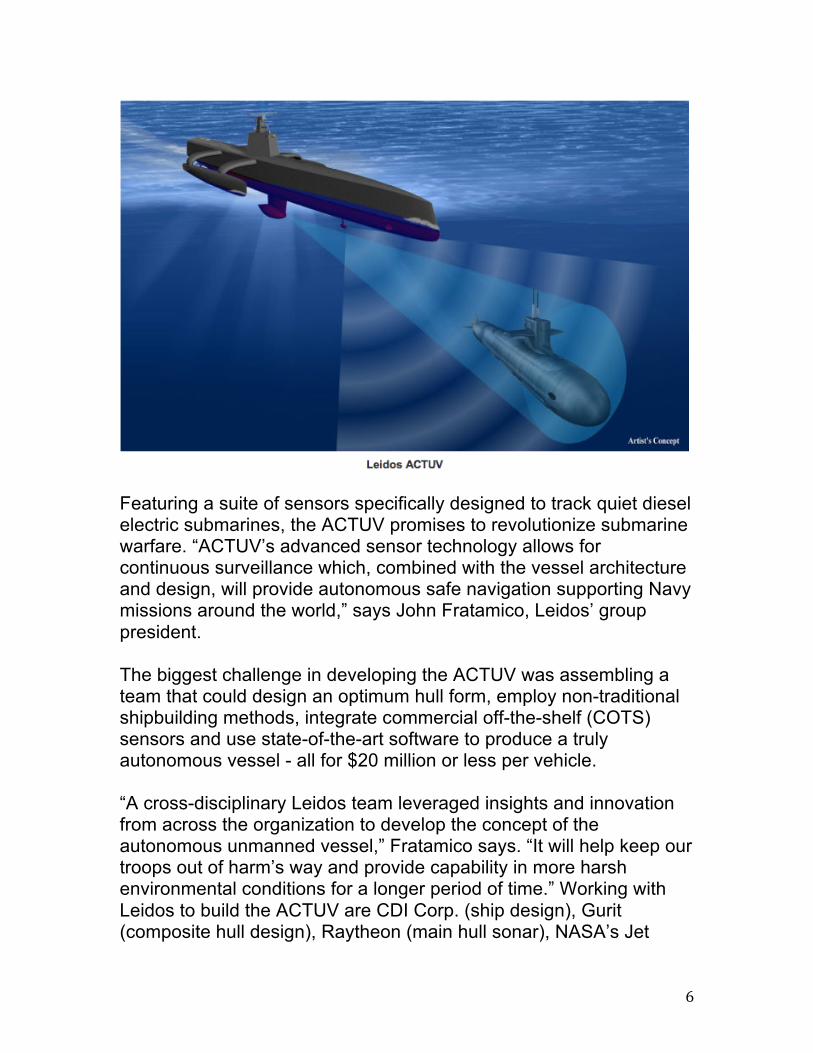
Featuring a suite of sensors specifically designed to track quiet diesel electric submarines, the ACTUV promises to revolutionize submarine warfare. “ACTUV’s advanced sensor technology allows for continuous surveillance which, combined with the vessel architecture and design, will provide autonomous safe navigation supporting Navy missions around the world,” says John Fratamico, Leidos’ group president. The biggest challenge in developing the ACTUV was assembling a team that could design an optimum hull form, employ non-traditional shipbuilding methods, integrate commercial off-the-shelf (COTS) sensors and use state-of-the-art software to produce a truly autonomous vessel - all for $20 million or less per vehicle. “A cross-disciplinary Leidos team leveraged insights and innovation from across the organization to develop the concept of the autonomous unmanned vessel,” Fratamico says. “It will help keep our troops out of harm’s way and provide capability in more harsh environmental conditions for a longer period of time.” Working with Leidos to build the ACTUV are CDI Corp. (ship design), Gurit (composite hull design), Raytheon (main hull sonar), NASA’s Jet

7
Propulsion Laboratory (autonomy and health monitoring technologies), Carnegie Mellon University (autonomy technology), and Oregon Iron Works/Christensen Shipyard (vessel manufacturing). The ACTUV will also be used for a variety of missions beyond sub tracking. With its installed sensor suite, the vessel may be capable of tasks such as minefield detection and mapping, hydrographic survey operations, anti-piracy and anti-drug surveillance and fisheries monitoring. It may also capable of performing intelligence, reconnaissance, and surveillance (ISR), ASW, mine countermeasures (MCM), electronic warfare (EW), and a variety of kinetic and non-kinetic attack missions. “A cross-disciplinary Leidos team leveraged insights and innovation from across the organization to develop the concept of the autonomous unmanned vessel,” Fratamico says. “It will help keep our troops out of harm’s way and provide capability in more harsh environmental conditions for a longer period of time.” Working with Leidos to build the ACTUV are CDI Corp. (ship design), Gurit (composite hull design), Raytheon (main hull sonar), NASA’s Jet Propulsion Laboratory (autonomy and health monitoring technologies), Carnegie Mellon University (autonomy technology), and Oregon Iron Works/Christensen Shipyard (vessel manufacturing). The ACTUV will also be used for a variety of missions beyond sub tracking. With its installed sensor suite, the vessel may be capable of tasks such as minefield detection and mapping, hydrographic survey operations, anti-piracy and anti-drug surveillance and fisheries monitoring. It may also capable of performing intelligence, reconnaissance, and surveillance (ISR), ASW, mine countermeasures (MCM), electronic warfare (EW), and a variety of kinetic and non-kinetic attack missions. Several other types of missions currently performed by manned vessels may also be possible with some design changes and/or trade-off of fuel tank space for mission packages, Antanitus says. With such modifications, the ACTUV could potentially serve as an autonomous Surveillance Towed Array Sensor System (SURTASS)

8
ship, an environmental survey platform, a vessel providing logistics supply support to Special Forces or a communications gateway or relay. The vessel could also be fitted out to provide rapid humanitarian aid supply transport, Antanitus notes. “The possibilities for outfitting this autonomous truck are many and varied, and these ideas represent just a few of them,” he says. “Once in the hands of the operational forces, many other alternate missions will certainly evolve.” Future Course
Most industry observers expect that autonomous control will eventually find its way into a wide range of surface and undersea vessels. “Full autonomy is becoming a truly possible feature [that will be] implemented in lot of new marine robots,” Ratti says. “It’s a big transformation in the field of marine technologies.” Darling acknowledges that autonomous control in simple environments is already possible. “Full autonomy in a complex environment, such as a unmanned surface vehicle operating at high speed through a congested harbor, is a goal for the future,” he adds. Lawyers may ultimately decide the fate of autonomous marine robots, James says. “Although the technology exists to accomplish true autonomous operations, there are present limitations due to liability and insurance obstacles,” she notes. “Moving forward, we will begin to see fully autonomous vehicles in all maritime domains, but there is the potential that there will be a lengthy transition from supervised autonomy to fully autonomous.” Still, nearly everyone agrees the move toward autonomy in marine robots is an unstoppable trend. “If you can have an autonomous car or UAV,” Ratti says, “you can certainly have an autonomous ship.”