Soil Mechanics Lecture Notes
61
Introduction to Soil Mechanics Dr. Hop Minh Nguyen
-
Upload
dias-bakhtiyarov -
Category
Documents
-
view
2.624 -
download
10
Transcript of Soil Mechanics Lecture Notes

IntroductiontoSoilMechanics
Dr.HopMinhNguyen

2
3.1. Introduction
People may often think about civil engineering as the field related to the design and construction
of the superstructures above the ground level. What is not easy to be seen is the foundation system
below the building; the construction of this part is, however, a crucial component of any
construction project. Failure in the foundation design and construction could easily lead to dire
consequences as it can affect the stability of the whole structure. Foundation can be considered as a
common type of loading impact on the original ground condition. Civil engineers need to study soil
mechanics to be able to understand and predict the behaviour of soils in response to any change to
its in-situ (original) condition, which would happen as the result of the construction activities.
Applications for soil mechanics theories are very diverse, which include (among others) foundation
design, stability analysis of natural and man-made slopes, design of retaining structures and
embankments, tunnel design, etc.
An important factor that makes soils apart from other construction materials is: soils are natural
materials. Further than that, soils have history, which would explain why soil is now at its current
location and condition. Would it have been formed here or it has been formed at some where else
and then transported to the current place? Soil history (normally in terms of hundreds or even
thousands of years) makes soil at each location on the earth unique and affects significantly its
behaviour. Understand what happened in the past helps the engineers to predict what could happen
when the material is subjected to new loading conditions. Soil behaviours are complex; working with
soils involves many uncertainties, you will learn later that the application of a factor of safety (FOS ≈
2 ÷ 3) is a common practice in the design of earth structures. The idea is that the capacity of the
material is purposely reduced, so the design would be based on a weaker material and the solution
is on the safe side.
We all live on the outmost layer of the earth that is called the crust. The crust is mainly
composed of rocks. When the rock surface exposes to the environment, it will be subjected to the
weathering processes. For examples, frequent large variations of temperature could lead to rock
cracking and ultimately to complete disintegration; or water entering the cracks from the surface
could be subjected to freezing and thawing cycle and the volume expansion could also break rock
into small fragments. These two processes (not exclusive) are classified as physical weathering. In
addition, there also have chemical weathering, in which water and carbon dioxide in the atmosphere
form carbonic acid that could react with the chemical substances within the composition of rocks.
These chemical processes result in the creation of new finer materials with the mineral composition
different than the mineralogy of the parent rocks. According to Craig (2004), soil is defined as “any
uncemented or weakly cemented accumulation of mineral particles formed by the weathering of
rocks”. Soil particles resulted from physical weathering of rock are normally in bulky form, with size
greater than 2 µm and having the same mineral composition of the parent rock. Typical soils are silt,
sand, gravel, cobble and boulder. Soils resulted from chemical weathering, on the other hand, are
clayey soils, which normally compose of platy clay mineral particles with size < 2 µm. As platy
particles having high specific area (i.e. high ratio of surface area per unit mass), soil structure is
affected significantly by surface forces. When clays are mixed with water, the platy particles carrying
negative charge on their surfaces attract cations and hydrogen atoms of the water molecules. The
water held onto the clay particles by attraction force is called double-layer water. The innermost

3
layer of water next to the clay surface is called absorbed water, which has higher viscosity than the
free water away from the clay particles. Absorbed water can move freely in parallel to the particle
surface but is restricted in the normal direction. The existence of the double layer water and the
ability of platy particles sliding relatively to each other explain for the plasticity property of clay
when it is mixed with water.

4
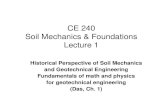
3.2. Soil classification & phase diagram:
Figure 2.1: Particulate nature of soil
Figure 2.1 shows a diagram of an idealized soil sample. As you can see, soil is not a continuum
but an assembly of soil particles. This statement becomes obvious when you observe a small heap of
sand put on your hand. The particulate nature of soil, however, still holds true for clays, although the
very small particles are not visible to naked eyes. Soil sample always contains a lot of internal voids;
if there is no water inside the void space, soil is dry as for layers of coarse sand or gravel above the
underground water table. Soils below underground water level could have the void space fully filled
by water; in this case, soil is fully saturated. Soils with small particle size (clay, silt, fine sand)
immediately above the water table can be fully saturated to partially saturated, because water can
rise above the steady water table due to the capillary effect. As soil particles are considered as
incompressible solid, the total volume of soil particles in a sample is always constant. Consequently,
volume change in soil is actually equal to change in the void volume that occurs when the particles
rearrange under the new loading condition.
Figure 2.2: Soil particle sizes (Atkinson, 1993)
Particle size of natural soils varies greatly from the “micrometre” range for clay particles up to as
large as half metre for boulder. The size of 0.06 mm is considered as the boundary between coarse
particle and fine particle. Coarse soil particles are visible to naked eyes, whereas the particles of fine
soils are only visible with the help of hand lens and/or microscope. Coarse soils in nature are
normally mixed with fine material, which is the dirt (clean material, however, can have all the
particles in the same size range, e.g. clean sand). In general, soil containing 35% and greater of fine
particles is referred as fine soil, coarse soils are soils with less than 35% fine content. With no
magnifying glass, it can be difficult to differentiate between clay and silt as both are fine particles.
Here, the distinction can be based on the plasticity property of clay mineral particles. Silt particles
can be fragments from broken sand particles and hence similar to sand, there is no bonding between

5
them so we can easily brush silt particles off our hand. On the other hand, clay mineral can absorb
water and becomes sticky on your finger, which will need to be washed off.
The existence of even a small content of clay mineral in soil could have an out of proportion
effect to the overall behaviour of the sample. Based on the plasticity characteristic of clay mineral,
soils are often classified as cohesive soil and cohesionless soil. Cohesionless soils are coarse soils
(sand, gravel, sandy gravel, etc.), which mainly consist of discrete particles with no bonding so it is
also called granular soil. Cohesive soils are fine soils with significant plastic behaviour resulted from
the interaction between the clay mineral content and the water inside the pore space. The cohesive
strength comes from surface forces, which is more dominant for small particles, and the negative
pore water pressure due to capillary tension.
• Classification of granular (coarse) soils based on particle size distribution (PSD):
Relative proportion of different particle sizes by mass within a soil sample can be determined by
doing sieve test. Before the test, any cobble or boulder (> 63 mm) will be removed, their mass
should be estimated; the total mass (M) of the remained soil sample is then weighted. The mass of
soil with particles smaller than 63 mm (D0) is let passing through a series of successively smaller
sieves (D1 > D2 > …> Di > ..). The mass of material retained on each sieve size (i.e. for particle size
larger than the opening size of the mesh) is weighted as well as the residual mass passing through
the last (smallest) sieve (size ≈ 63 µm). Dividing the retained mass (mDi) on each sieve (Di) by the
total mass (M) that we have determined at the beginning of the test, we can calculate the
percentage of the particles that are greater than the sieve size Di and smaller than the greater sieve
size immediately above it (Di-1). The percentage of material smaller than a size Di can be obtained by
subtracting the total mass (M) by the sum of mass of all materials larger than Di and then divided by
M, which can be given in the following form:
( )
%100...
(%) 11 ×+++∑−
= −≤
M
mmmM
M
mDiDiDDD i (2.1)
Size distribution for particles smaller than 63 µm can be obtained via hydrometer analysis, which
is based on the sedimentation of particles in water. Further details can be found in the text book of
soil mechanics (e.g. Das, Advanced soil mechanics, 2008).

6
Example 2.1: Test results on particle size distribution of soil
The first column in the table shows the sieve size (Di) in BS standard. “Percentage smaller” is the
value of M
miDD≤ in Eq. 2.1 for the corresponding sieve size. The particle size distributions of four
soils A, B, C and D are plotted as follows:
The particle size corresponding to any specific value of “Percentage smaller” on the vertical axis
can be read off from the PSD graph. For example, particle size at 10% smaller of Soil B can be
obtained by drawing a horizontal line crossing the vertical axis at 10% and intersect the PSD curve of
Soil B at approximately near the boundary between fine and medium sand. Furthermore, a vertical
line drawing at the boundary size between gravel and sand intersects the PSD of Soil A at around
23% on the vertical axis, which would mean Soil A consists of about 23% sand and 77% gravel, and
hence the sample is gravel dominant (according to the table below, Soil A is a very sandy GRAVEL).
Craig (2004)

7
Based on the percentage of different particle sizes from the PSD graph, coarse soils consisting of
more than one type of material can be classified as follows:
The characteristics of a coarse soil can be reflected through the PSD. The shape and the slope of
the curve can be described in terms of two simple parameters defined as follows:
� The coefficient of uniformity (CU): 10
60
D
DCU = (2.2)
� The coefficient of curvature (CZ): 1060
2
30
DD
DCZ = (2.3)
Here, D10, D30 and D60 are the particle sizes (abscissa) corresponding to 10%, 30% and 60% values
on the vertical axis (coordinate) of the PSD graph. A soil is referred as well-graded if we have CU ≥ 4
and 1 ≤ CZ ≤ 3. A soil having CU ≤ 2 is considered uniform, which means its particles are more or less
of similar size.
• Classification of fine soils based on plasticity characteristic:
The behaviour of fine soils depends very much on the amount of water inside the pore space.
Clays with no or very little water are brittle, which could crumble between your fingers. Adding
enough water, we now can easily deform the sample into any shape without cracking. However, if
too much water is added, clay can flow like a viscous liquid under gravity.
Table 2.1 Classification of composite coarse soils (Craig, 2004)

8
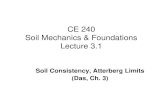
Figure 2.3: Consistency of cohesive soils (Das, 2008)
Water content or moisture content is defined as the ratio of the mass of water over the mass of
the solid phase (i.e. soil particles). Figure 2.3 describes different states of a cohesive soil depending
on the value of moisture content. Liquid limit is the boundary moisture content when soil stops
behaving as a liquid with a decrease in water content. Compared to the liquid state, soil in plastic
state would develop some resistances against shearing deformation and hence the sample could
hold its shape. As water content continues to decrease, clay sample will pass its plastic limit when it
moves into the semisolid state with brittle failure, and soil becomes crumbly as the result. Shrinkage
limit is reached once the volume of the sample becomes constant regardless of any further decrease
of water content, and soil is now in solid state. Cohesive soils at the field are normally in plastic
state, the range of water content for soil existing in the plastic state is called plasticity index, PI,
which is equal to the difference between PL (plastic limit) and LL (liquid limit) or PI(%) = LL(%) –
PL(%). The values of PL, LL and PI for cohesive soil can be determined from standard laboratory tests.
Since plasticity of clay is due to the existence of the double-layer water, the plasticity index is
affected by the capacity of soil in absorbing water, which depends on the amount of clay mineral in
the sample and the type of the clay mineral. In general, the finer the mineral, the higher the specific
area and the higher plasticity index. Skempton (1953) found that the PI of a soil is a linear function of
the percentage by mass of the clay mineral particles (< 2µm) within the sample; this can be
described by the following equation:
sample soil inside particles mineralclay of massby %
PIA = (2.4)
Here, A is a constant called activity which depends on the type of the clay mineral. For example,
the value of A for illite mineral is 0.5 – 1.0 > A = 0.5 for kaolinite. Note that the specific area of illite
(100 m2/g) is greater than kaolinite (10 m
2/g), and this would imply that illite mineral can absorb
more water than kaolinite mineral. We need to do standard tests on soil to determine the value of
PL, LL and PI; fine soil can then be classified as clay or silt depending on the value of PI (see Fig. 2.4).
In general, PI of clay will be greater than PI of silt (in Fig. 2.4, clay (C) is above the A-line whereas silt
(M) is below). Furthermore, based on the value of LL (wL in Table 2.2), soils are further divided into
smaller groups with low, intermediate, high plasticity, etc.

9
Figure 2.4: Plasticity chart in BS standard (Craig, 2004)
Some examples on the use of the letter symbols in Table 2.2: GW (well graded gravel), GCL
(clayey gravel with clay of low plasticity), MIS (sandy silt with silt of intermediate plasticity).
• Phase diagram and phase relationships:
Figure 2.5: Phase diagram for soil
Soil is multi-phase material, which consists of soil particles as the solid phase, pore water as the
liquid phase, and pore air as the gas phase. Fully saturated soils only consist of two phases: solid and
liquid. As the behaviour of soil will depend on the relative proportions of its individual phases, the
properties of a soil sample can be studied based on an idealized phase diagram as shown in Fig. 2.5.
Here, while the letter symbols M and V indicate mass and volume; the subscripts a, w, s specify the
mass and volume of each individual phase: air, water and solid, respectively; Vv is the volume of
Table 2.2 Terms and letter symbols used for classification of soils (Craig, 2004)

10
void, which is the sum of air volume and water volume. Using the phase diagram, several soil
properties can be defined as follows:
� Void ratio (e) and porosity (n):
s
v
V
Ve ==
solid of volume
voidof volume;
V
Vn v==
volumetotal
voidof volume;
e
en
+=1
; n
ne
−=1
� Degree of saturation (Sr):
v
w
rV
VS ==
voidof volume
waterof volume
Dry soil: Sr = 0 (void is full of air); fully saturated soil: Sr = 1 (void is full of water); otherwise, 0 < Sr < 1.
� Water content or moisture content (w):
s
w
s
w
W
W
M
Mw ===
solid of mass
waterof mass
� Weight and mass: weight is the downward force acting on a mass due to earth’s gravity
(g = 9.81 m/s2), the dimension of weight is the dimension of force (e.g., N, kN).
W = mass * gravity = M * g (1 N = 1 kg * 1 m/s2)
� Specific gravity (Gs): is the ratio between the mass (or weight) of a material and the mass
(or weight) of the same volume of water. For the solid phase of soil,
w
s
ws
s
sV
MG
ρρ
ρ==
where ρs and ρw are the densities (mass per unit volume) of solid (soil particle) & water, respectively.
� Unit weight of soil (γ): weight of a unit volume of soil. For dry soil, γ = γdry; for saturated
soi: γ = γsat; for the general case of natural soil (0 ≤ Sr ≤ 1):
e
eSG
eVV
SVVG
VV
WW
V
W rs
w
ss
rvwsws
vs
ws
+
+=
+
+=
+
+===
1 volumetotal
weighttotalγ
γγγ
e
G
eVV
VG
VV
W ws
ss
sws
vs
s
dry +=
+=
+==
1 volumetotal
solid ofweight γγγ ; )1S (because
1r =
+
+=
e
eGs
wsat γγ
Here, γw is the unit weight of water, γw = ρw * g = 1000 (kg/m3) * 9.81 (m/s
2) = 9.81 (kN/m
3)
� Relationship between e, w, Gs and Sr: eSr = wGs ; or e = wGs for fully saturated soil.

11
Example 2.2: A saturated sample of clay was extracted from the ground and weighted. It was then
placed in an oven for 24 hours to dry and weighted again afterwards. Determine the void ratio and
saturated unit weight knowing that specific gravity of soil particle Gs = 2.7, and:
Wet mass of soil = 275 g
Dry mass of soil = 196 g
Answer: M = 275 g, Ms = 196 g → Mw = M – Ms = 275 – 196 = 79 g
Vs = Ms/ρs = Ms/ (Gsρw) = 196/(2.7*1) = 72.6 cm3
Soil is fully saturated: Vv = Vw = Mw/ ρw = 79/1 = 79 cm3
Void ratio: e = Vv/Vs =79/72.6 = 1.09
Saturated unit weight: γsat = γw(Gs+e)/(1+e) = 9.81(2.7+1.09)/(1+1.09) = 17.8 kN/m3

12
3.3. Effective stress & drainage
Figure 3.1: Normal and shear stresses acting at the bottom of a block sitting on a horizontal surface
Figure 3.1 shows a block sitting on top of a flat surface. Due to its weight, the block will apply
onto the surface a normal stress that is equal to its self-weight divided by the contact area. If the
block and the surface are made of hard materials, the block will not deform as well as will not sink
into the surface under reasonable combination of its self-weight and any extra vertical loads applied
on top of the block. If the block tends to move horizontally, there will have shear stress acting
horizontally against that movement and can be calculated by dividing the horizontal force over the
contact area. The block will start sliding only when the applied horizontal force is greater than the
maximum frictional resistance. The stress condition in Fig. 3.1 can be an approximation of the stress
condition at the contact point between soil grains. For the general stress range in engineering
applications, soil particles can be considered as incompressible, which means the grains will not
deform. Furthermore, there is shearing resistance at the contact point, which gives shear strength to
the soil skeleton. When the applied stress exceeds the strength of the soil grain skeleton, there will
have slippage occurs at many contact points, which leads to rearrangement of the soil particles and
a new structure will be formed. Volume of the soil sample, consequently, could change during this
process. The water inside the pores between the soil grains is considered incompressible, which
means water does not change volume. However, unlike the soil skeleton, water has no shearing
resistance and hence can not help to restrict the distortion of the soil sample. As both soil grains and
water are incompressible, any attempt to reduce the volume of a saturated sample is not possible if
the pore water is not allowed to be vented out. You will learn later that this condition is called
undrained loading condition. Only when water is allowed to escape from the pore then the volume
of saturated sample can change and this is called drained loading condition.
Figure 3.2: Discrete contact points and average pressure acting at the bottom of a soil column
Figure 3.2 shows the internal situation inside an idealized soil sample with particles contact each
other at discrete points. In reality, there is countless number of contact points as there are easily
millions of soil particles in even a small geotechnical problem. In addition, the stress condition at
each contact point is not the same, and hence it is not practical to define the stress condition at a
point inside a soil body based on the local condition surrounding the point. Instead, we will need to
find the stress value in an average manner. Figure 3.2 shows a soil column in a similar situation to
the solid block in Fig. 3.1. As we will not be able to count the exact number of contact points that a
real soil column would have with the horizontal surface, we assume that the weight of the column is

13
distributed evenly over the whole bottom area of the column. The average vertical pressure can be
determined as:
hA
Ah
A
V
v
γγγ
σ
===
=
column theof area sectional cross
column theofweight
The total vertical stress at depth h below
the ground surface can be calculated as:
hv γσ = (3.1)
where γ is the unit weight of natural soil. For
dry soil, γ = γdry; similarly γ = γsat for saturated
soil. If the water table is at the middle of the
column, we need to apply different γ for soil
above and below the water table.
Figure 3.3: A soil column from the ground
Example 3.1: A container of 2.5 m2 cross-sectional area (A = 2.5 m
2) and 3 m deep (h = 3m) is filled
up with dry sand with a voids ratio of 0.6 (e = 0.6). Determine the total vertical normal stress on the
base of the container. Ignore wall side friction.
Answer:
Dry unit weight of sand: γd = (γwGs) / (1+e) = 10 *2.7 / (1 + 0.6) = 16.9 kN/ m3
Total weight: W = γdV = γdAh = 16.9 (2.5 · 3) = 126.7 kN
Total vertical normal stress (assumed acting uniformly on the base):
σv = W/A = 126.7 / 2.5 = 50.7 kN/m
or: σv = Ahγd/ A = γdh = 16.9*3 = 50.7 kN/m2
If the soil is now saturated (i.e. all the voids are filled up with water):
We need to calculate the saturated unit weight of the soil:
γsat = γw(Gs + e)/(1+e) = 20.6 kN/m3
Total vertical normal stress:
σv = γsath = 20.6*3 = 61.8 kN/m2
Similar to the calculation of the total vertical stress in Eq. 3.1, water pressure at depth hw below
the underground water table can be obtained as follows:
www hγσ = (3.2)
Here, the void spaces are assumed interconnected, and pore water is continuous; the pore water
pressure defined in Eq. 3.2 corresponds to hydrostatic condition, which means the pressure is the

14
same in all directions. We have discussed in the previous part that the behaviour of a soil sample
depends on the stress condition at the contact points. We, however, have not discussed how the
stress condition at that contact points can be affected by the pressure of water inside the pore and
vice versa. This is a complex coupled process that sets soil apart from other construction materials,
and truly a fundamental of soil mechanics that civil engineers must understand.
Figure 3.4: The combination of interparticle contact forces and pore water pressure in equilibrium
with the external load applied at the boundary of a soil sample
Figure 3.4 shows an idealized soil element subjected to external load at the boundary. In a stable
situation, all soil grains should be at rest, and forces are in equilibrium. Considering the equilibrium
of forces on any arbitrary horizontal plane passing through the element, we can see that the self-
weight of soil and any extra applied load will be transmitted partly through interparticle contact
forces; the rest of the load can be equilibrated by pore water pressure. Now if there occurs a small
perturbation leading to sliding movement at several contact points, particles will rearrange and
voids collapse. As void tends to reduce its volume, water pressure inside the void will increase. At
the same time, when particles rearrange, some contacts will be lost and the corresponding forces
will be released. Note that during this process, the sum of the soil’s self-weight and any extra load
will maintain the same. This means a decrease in contact forces could lead to an increase in pore
pressure; the total force, meanwhile, is kept constant. In soil mechanics, such a situation can be
conveniently explained in terms of the conceptual effective stress. In 1925, Terzaghi suggested the
principles of effective stress for saturated soil in the following form:
σ = σ’ + u (3.3)
where: σ is the total stress; σ’ is the effective stress that represents (in an average sense) the stress
carried by the soil skeleton; lastly, u is the pore water pressure (PWP). It is important to note that
only the total stress, σ, and pore water pressure, u, are two measurable physical quantities. The
effective stress, σ’, is always obtained as the difference between σ and u. In theory, effective stress
can be calculated if you know the magnitude and direction of all interparticle contact forces;
however, this is impractical and perhaps unnecessary since we often need to consider millions of
particles for real soils. The application of the effective stress has been validated in many engineering
problems and it is well considered as one of the most important concepts in geotechnical
engineering. Equation 3.3 can be rewritten as:
σ’ = σ - u (3.4)

15
Based on Eq. 3.4, if σ is kept constant, an increase in u will lead to a decrease in σ’. Refer to Fig.
3.4, an increase in the positive pore water pressure will tend to push soil particles apart from each
other and hence decrease the contact forces between the particles. If the PWP is large enough to
become equal to σ, then σ’ will become zero and particles can float inside water. Since there is no
normal stress at contact, there will have no shearing resistance and the shear strength of soil is zero.
If you stand on top of such sand, you will immediately sink into the ground because the soil does not
have any strength to support your weight. If there is a flow of water, the particles can easily go with
the flow and be washed away. The condition of zero effective stress often happens for sand and is
called quick sand. The value of PWP in Eq. 3.4 can go to negative, which implies water pressure is in
tension. Negative PWP can increase effective stress by pulling particles to each other, and hence
increase the shearing resistance at contact as the frictional force is proportional to normal force.
This improvement effect, however, is not permanent. Negative PWP tends to suck water into the
void space, and once more water is added, negative PWP and its improvement effect will disappear.
An excellent example is the case of sand castle. Sand castle is built with damp sand that has negative
PWP so it stands, when water is gradually added to a sand castle, the castle will collapse at some
points.
Example 3.2: With the water table at 3m underground, draw the variation of the following with
depth:
[1] total vertical stress (σv)
[2] pore water pressure (u), and
[3] effective vertical stress (σ’v). Determine the values of σv, u & σ’v at level X.
Answer:
Region A:
At h = 0m, σv = 0 kPa
u = 0
At h = 3m, σv = (20)(3) = 60 kPa
u = 0
σ’v = σv – u = 60-0 = 60 kPa
Region B:
At h = 5m, σv = 60 + 20(2) = 100 kPa
u = 10(2) = 20kPa
σ’v = σv – u = 100-20 = 80 kPa
Region C:
At h = 8m, σv = 100 + 17(3) = 151 kPa
u = 10(5) = 50kPa

16
σ’v = σv – u = 151-50 = 101 kPa
At level X:
At h = 6.5m, σv = 100 + 17(1.5) = 126 kPa
u = 10(3.5) =35kPa
σ’v = σv – u = 126-35 = 91 kPa
Note: the unit weight of fine sand above the water table was taken as saturated because water can
rise above the WT due to capillary effect. The amount of capillary rise for coarse sand and
gravel is negligible, whereas it can be a few metres for silt and fine sand.
We have discussed that the relationship between effective stress and pore water pressure is a
coupled process, which means any change in one parameter will affect the other and vice versa. We
will now discuss what would happen to the effective stress and PWP for an increase in the total
stress. According to Eq. 3.3, we should have:
∆σ = ∆σ’ + ∆u (3.5)
When there is a large enough increase ∆σ of the total stress and the present soil skeleton is not
able to sustain the higher load, particles need to rearrange to form a new structure that could resist
the load. However, since the soil element in the ground is constrained by other elements
surrounding it as well as the voids are fully occupied by water for saturated soil, particle
rearrangement will not take place unless pore water can escape from the void. In this situation,
firstly, PWP will increase by the same increase amount of the total stress, i.e. ∆u = ∆σ; and then, as
water going out of the void, ∆u decreases and the corresponding load is transferred to the soil
skeleton and effective stress is increased by ∆σ’. Eventually, PWP will return to its original
hydrostatic value; at that point, ∆σ’ = ∆σ and ∆u = 0.
Figure 3.5: Dissipation of excess pore water pressure with time (Whitlow, 1995)
The increase of PWP over its hydrostatic condition is called excess pore water pressure (∆u), the
dissipation of excess PWP can be described graphically in Fig. 3.5. The soil element is modelled as a
combination of a spring system immersed with water inside a watertight container; water is only
allowed to go out through a valve. Here, the spring system represents the stiffness of the soil
skeleton; the valve reflects the permeability of soil. Highly permeable soil means a larger valve. The
dissipation of excess PWP can be explained by using the spring analogy. When we increase the
vertical load in Fig. 3.5, the load is instantly transferred to water because the stiffness of water is
much higher than the stiffness of the spring. Since water pressure is increased, it is pumped out
through the valve. When water goes out, the piston goes down, and the load is gradually transferred
to the spring system. The whole system will come to new equilibrium when the load is equilibrated

17
by the reaction force from the spring system, water returns to hydrostatic condition and water is no
longer pumped out of the container. For soils with low permeability, e.g. clays, the dissipation of
excess PWP will take years to complete, so we often need to check the stability of earth structure in
short term based on the assumption of no dissipation of excess PWP taking place and this is called
undrained analysis. Dissipation of excess PWP occurs quickly for sand and soil with high
permeability, which means the applied load will be transferred to the soil skeleton during the
construction process and we need to do the analysis in drained condition. Note that during
earthquake, sand tends to be consolidated by ground vibration, which occurs very rapidly that
excess PWP in sand can not be dissipated and sand can fail in undrained condition. This type of
failure of sand is called liquefaction. In summary, drained or undrained depends on the relative
relationship between the rate of loading and the permeability of soil. The same saturated soil could
behave as undrained in one rapid loading condition but become drained in another slower mode of
loading.

18
3.4. Permeability & one dimensional seepage
Soil is a porous material with interconnected voids that can form continuous passageways for
water passing through it. There exists, however, two different types of water flow in soil: steady
state flow and transient flow. Steady state flow is satisfied when pore water pressure at any point
along a flow line is a constant with time and so is the flow rate. Effective stress also does not vary
and soil grains can be considered in static condition (i.e. the grains do not move); there is,
consequently, no volume change. On the other hand, transient flow occurs when there is volume
reduction leading to excess pore water pressure, which is then dissipated towards any nearby free
drainage boundary. In this case, excess pore water pressure and flow rate will decrease with time
and eventually becomes zero when the system reaches a new equilibrium. Effective stress will
increase at the end. The process of transient water flow linked to soil compression is called
consolidation in soil mechanics. In this section, we will, however, only focus on the steady state
water flow in soil, which is called steady state seepage or just seepage.
Like the waterfall, water in soil flows from a point of high energy to a point of low energy.
According to Bernoulli’s theorem, the total head at a point is defined as:
zu
g
vH
w
++=γ2
2
(4.1)
where H is the total head, hv = v2/2g is the velocity head, hw = u/γw is the pressure head, and finally z
is the elevation head. The velocity of seepage flow, v, is very small, and hence hv can be neglected
from the calculation of the total head for seepage flow. To measure water pressure at a point under
the ground, we can insert a small diameter tube (called standpipe or piezometer) into the ground;
the bottom end of the tube is located at the depth where we would want to measure the PWP.
Water is only allowed to enter the tube from its end; the value of PWP at the bottom end of the
tube is equal to the pressure due to the weight of the rising water column or u = hw*γw. The pressure
head, hw, defined in Eq. 4.1 is equal to the height of the water column that rises inside the
standpipe. Elevation head, z, is the distance from an arbitrary horizontal datum to the point.
Figure 4.1: Total head loss in seepage flow
Figure 4.1 shows a one dimensional water flow passing through a saturated soil sample placed in
a small pipe, the flow is said in one dimension as we assume it only occurs in parallel to the pipe but

19
not in the direction normal to it. Water flows from point A to point B as HA > HB, the difference ∆H =
HA - HB describes a loss in energy, which is due to friction between soil grains and water; ∆H is called
total head loss. Note that the horizontal datum can be chosen arbitrarily because it always affects
the values of zA and zB by the same amount; the value of ∆H is unchanged. The flow from A to B in
Fig. 4.1 will continue as long as the values of HA and HB are maintained. If there is no water going into
and out of the pipe, then water level on the A side will go down, water level on the B side will go up;
seepage flow will stop once HA = HB or ∆H = 0. The flow rate and the outflow velocity of seepage flow
in Fig. 4.1 can be described by Darcy’s law in the following form:
Akiq = (4.2)
where q is the volume of water passing through the cross-sectional area, A, of a soil sample in a unit
of time, k is the coefficient of permeability of soil, i is the hydraulic gradient defined as:
L
Hi
∆= (4.3)
∆H is the total head difference and L is the distance between two sections at A and B in Fig. 4.1. The
outflow velocity can be calculated as:
L
Hkki
A
qv
∆=== (4.4)
Idealised diagram:
Qin = Qseepage = Qout
vA = vsAvoids
Since: Avoids << A
vs >> v
Figure 4.2: Comparison between seepage velocity and outflow velocity
The outflow velocity in Eq. 4.4 corresponds to the whole cross-sectional area of the soil sample.
We should, however, note that seepage flow inside the sample only passes through the very small
area of void space. Since the volume of water is the same, seepage velocity is much greater than the
outflow velocity as shown in Fig. 4.2. The coefficient of permeability, k, of a soil can be determined
in the laboratory (e.g. constant head test or falling head test) or can be determined at the field (e.g.
well pumping test). For sands, k can be obtained based on empirical correlation, for example, Hazen
showed that:
(m/s) 10 2
10
2Dk −= (4.5)

20
where D10 (mm) is the particle size at 10% finer read from the PSD curve of the sample. The typical
value of k for different types of soil is:
Figure 4.3: Coefficient of permeability for different soils (Craig, 2004)
Example 4.1: Effective stress affected by upward and downward seepage.
Calculate the effective stress at the bottom of a sand column in the following cases, knowing
that unit weight of dry sand, γdry = 16.9 kN/m3, and saturated unit weight γsat = 20.6 kN/m
3.
Answer:
Effective stress at the bottom of the sand column in each case can be calculated as follows:
Case (1): dry soil
σv = 16.9*2 = 33.8 kPa
u = 0
σ’v = 33.8 kPa
Case (2): saturated soil – hydrostatic condition
σv = 20.6*2 = 41.2 kPa
u = 10*2 = 20 kPa
σ’v = 41.2 – 20 = 21.2 kPa
Case (3): saturated soil – upward seepage
σv = 20.6*2 = 41.2 kPa
u = 10*3 = 30 kPa
σ’v = 41.2 – 30 = 11.2 kPa
Case (4): saturated soil – downward seepage
σv = 20.6*2 = 41.2 kPa
u = 10*1 = 10 kPa
σ’v = 41.2 – 10 = 31.2 kPa
It should be noted in the previous example that the effective stress in the case of downward
seepage (4) is greater than the hydrostatic pressure (2). This is due to the effect of a seepage force
acting in the direction of the flow. The seepage force that drives water flow through soil can be
calculated as:
(m/s)

21
AHJ w ×∆×=γ (4.6)
If we divide J by the volume of the soil sample, we can obtain the value of seepage force per unit
volume of soil, that is:
ww i
AL
AH
V
Jj γ
γ=
∆== (4.7)
The seepage force can be related to the pressure transferred from water to soil particles via
frictional drag; the magnitude of seepage force depends on the hydraulic gradient, i, of the flow. As
seepage force acts in the direction of flow, downward seepage will increase the value of effective
stress and vice versa. As the result of this, there exists a critical condition for an upward flow into a
hydrostatic soil-water system. When the flow is strong enough, the pressure due to seepage force
can be equal to the effective stress of soil in the original hydrostatic condition but acts in opposite
direction, and hence the effective stress is reduced to zero. The hydraulic gradient in this situation is
called critical hydraulic gradient (ic). For the soil sample in Example 4.1, ic can be determined as:
• Original effective stress in hydrostatic condition: σ’v = γsat*2 - γw*2 = (γsat - γw)*2
• Seepage pressure due to upward flow: 2*/ wcwcs iLiAjVp γγ ===
• ps = σ’v → 2*)(2* wsatwci γγγ −= → 06.110
106.20=
−=
−=
w
wsatci γ
γγ> the value of i in
case 4: i = (2-1)/2 = 0.5
The critical hydraulic gradient that could cause quick condition (σ’ = 0) in soil can be determined
as:
w
wsatci γ
γγ −= (4.8)

22
3.5. Two dimensional seepage & flow net
We have discussed in the previous section that one dimensional flow is driven by a difference in
terms of total head. One dimensional flow is most suitable to describe vertical flows at the field (i.e.
upward and downward flows) where we only have the variation of the total head in the vertical
direction. Total head on a horizontal line, on the other hand, is a constant, and hence there is no
horizontal water flow (the same situation as in Example 4.1). If there is a variation of total head in
both horizontal and vertical directions, water flow will occur in two dimensions. In this section, we
will discuss the derivation of a governing equation for two dimensional flows. Furthermore, the
construction of a graphical solution (called flow net) for two dimensional seepage flows will be
presented. Using flow net, we can calculate the value of PWP (u) at any point under the ground. This
has an important role as we need to be able to determine the value of effective stress (σ’=σ-u) in
order to assess the stability of the earth structure, which has seepage flow going under or through it.
Figure 5.1: In-flow and out-flow seepage velocities of a soil element in two dimensions
Soil is assumed fully saturated, homogeneous and has constant permeability in all directions, k =
kx = kz. The volume of water going into the soil element in Fig. 5.1 can be calculated as:
Qin = vinA = vxAx + vzAz = vx*∆z*1 + vz*∆x*1
Similarly, the out-flow volume of water is:
Qout = voutA = (vx + δvx)Ax + (vz+ δvz)Az = (vx + δvx)*∆z*1 + (vz+ δvz)*∆x*1
Since Qin = Qout, we have:
Qout - Qin = 0 or δvx*∆z + δvz*∆x = 0 ⇔ 0=∆
+∆ z
v
x
v zx δδ
For ∆x → 0 and ∆z → 0, we have:
0=∂∂
+∂∂
z
v
x
v zx (5.1)

23
From Darcy’s law, we have vx = kx(∂H/∂x) and vz = kz(∂H/∂z). Substituting these to Eq. 5.1, we
have:
kkkz
H
x
H
z
Hk
x
Hk zxzx ===
∂∂
+∂∂
→=∂∂
+∂∂
as 002
2
2
2
2
2
2
2
(5.2)
Equation 5.2 is Laplace’s equation and is the governing equation for two dimensional steady
seepage flows. The Laplace’s equation in Eq. 5.2 can be expressed in terms of two conjugated
functions: the potential function (φ) and the stream function (ψ).
• The potential function φ(x,z) is defined such that:
z
Hkv
zx
Hkv
xzx ∂
∂−==
∂∂
∂∂
−==∂∂ φφ
and
(5.3)
The incremental form of φ(x,z) is in the following form:
dzvdxvdzz
dxx
d zx +=∂∂
+∂∂
=φφ
φ
if dφ = 0, we have z
x
v
v
dx
dz−=
(5.4)
Integrating Eq. 5.3, we obtain:
CzxkHzx +−= ),(),(φ
(5.5)
If the potential function φ(x,z) in Eq. 5.5 is given a constant value, e.g. φ1, then it represents a
curve, every points on this curve will have the same value of total head, H1. The potential function
defines a family of curves with each curve is associated with a constant total head (or equi-
potential); and hence it is called equipotential line.
• The stream function ψ(x,z) is defined such that:
z
Hkv
xx
Hkv
zzx ∂
∂−==
∂∂
−∂∂
−==∂∂ ψψ
and
(5.6)
The incremental form of ψ(x,z) is in the following form:
dzvdxvdzz
dxx
d xz +−=∂∂
+∂∂
=ψψ
ψ
(5.7)
If the stream function ψ(x,z) is given a constant value, e.g. ψ1, then it represents a curve. And
because we have dψ = 0 for a constant value of ψ, the curve has the following characteristic:

24
x
zxz
v
v
dx
dzdzvdxv =→=+− 0
(5.8)
Equation 5.8 means the tangent of the curve specifies the direction of seepage velocity vector at
that point, and hence it is a flow line. The stream function defines a family of the travel paths (flow
lines) that water moves along through soil in seepage flow. Furthermore, according to Eq. 5.4 and
Eq. 5.8, the flow line and equipotential line will intersect each other at right angle.
Finding solution for seepage flow can be done by searching for the exact form of the two
potential and stream functions. The exact analytical solution, however, is usually not available for
practical problems with complex soil and boundary conditions. For simple problems, an approximate
solution can be found graphically by drawing the flow net. Flow net is a net constructed by a set of
curvilinear equipotential lines intersected perpendicularly by a set of curvilinear flow lines. The area
between any two adjacent equipotential lines and two flow lines forms a “curvilinear square”. The
accuracy of the solution depends on how good these requirements can be met by the flow net.
Drawing a flow net normally requires several trials until the best solution can be found.
Example 5.1: Draw a flow net for the estimation of seepage flow occurring under a dam as shown in
the figure below.
Answer:
Start drawing the flow net by identifying from the boundary conditions of the problem any
obvious flow lines and equipotential lines. In general, any boundary along impermeable materials
can be flow lines as water cannot penetrate these surfaces. In the problem below, two flow lines (i.e.
blue lines) can be identified as: FL1) running along the base of the dam and the two sides of the
sheet pile wall, and FL2) running along the boundary between soil and the underlying impermeable
material. Similarly, two equipotential lines (i.e. the red lines) can be identified: EPL1) the ground
surface on the reservoir side of the dam, any point on this line will have the same total head (H = 18
+ h) and EPL2) the ground surface on the downstream side of the dam, H = 18 m. After defining
some initial flow lines and equipotential lines, the flow net can be further developed as follows:
a) Draw a new flow line (FL3) next to the first FL1, the line should cross the EPL1 and EPL2
at right angles.
b) The two flow lines FL1 and FL3 forms a flow channel. Divide the area of this first flow
channel into several squares by adding a suitable number of new equipotential lines.
c) Extend all new EPL beyond the FL3. When do this, you should keep in mind that you
need to form new squares between FL3 and the next FL4 flow line, and hence the EPLs
should oriented accordingly.

25
d) Draw the next flow line FL4. Space the FL4 so that squares are formed at each area
between two adjacent EPLs and bounded by FL3 and FL4. If you can not have all the
squares as you want, readjust the relative position of FL4 and the EPLs in previous steps
to get better results.
e) Continue the process and remember that the EPLs and the FLs should cross at right
angles until you have the complete flow net with the all best squares as you can. Note
that the flow net only gives you a rough estimation for seepage flow. It is, however,
more useful to help you “feel” the problem.
h
Datum
z = 0
EPL1 EPL2 FL1
FL2
FL3
FL3 FL4 FL4
FL3
FL5
EPL1
EPL3 EPL4 5 6
EPL2
7 8 9
10
FL1
FL1 FL1
FL2
FL2 FL2

26
Figure 5.2: Constant head drop & constant flow rate in a flow net
Figure 5.2 shows a small part of a flow net comprising of three flow lines and three equipotential
lines. Considering the flow along a flow channel, the same flow rate should be transferred through
Box 1 and then Box 2, which means:
QBOX1 = QBOX2 = Q1
where: QBOX1 = k1 A1 (H1-H2)/L1
QBOX2 = k2 A2 (H2-H3)/L2
Now if only these equipotential lines and flow lines are drawn to make the box a SQUARE, i.e.
A1=L1, A2=L2 and assuming k is a constant:
Q1 = k(H1-H2) = k(H2-H3)
Consequently, H1-H2 = H2-H3 → the head drop between any two adjacent equipotential lines
(∆Hi) is the same. If the total number of equipotential lines is NEPL, the total number of head drops
(∆Hi) occurring in a flow net is Nd = NEPL -1. The equipotential drop ∆Hi can be obtained as:
1−
∆=
∆=∆
EPLd
iN
H
N
HH
(5.9)
If we know the value of the total head at the boundary EPLs (e.g., in Example 5.1, the total head
of EPL1 and EPL2 can be determined from the boundary conditions) and the value of the total head
loss ∆H, then based on the flow net, we can calculate ∆Hi and the total head Hi of each EPL. Since the
total head of each equipotential line (Hi) can be determined, the pressure head at any point A on a
EPL can be calculated as (hw)A = (Hi)A – zA. Here, zA is the elevation head or the vertical distance from
the chosen datum to point A. The value of pore water pressure at point A is equal to:
uA = γw * (hw)A (5.10)

27
In a similar way, if we consider Box 1 and Box 3, then:
QBOX1 = k1 A1 (H1-H2)/L1
QBOX3 = k3 A3 (H1-H2)/L3
Since A1=L1, A3=L3 and assuming k is a constant.
QBOX1 = k(H1-H2) = k∆Hi
QBOX3 = k(H1-H2) = k∆Hi
So we have: QBOX1 = QBOX3; or Q1 = Q2. Consequently, the flow rate is the same for each flow
channel in a flow net and can be determined as:
d
iiN
HkHkQ
∆=∆=
(5.11)
Using the flow net, the total flow rate of seepage flow can be calculated as the summation of the
flow rate of each flow channel:
1
1
−−
∆=∆=∆
== ∑EPL
FL
d
f
d
fiN
NHk
N
NHk
N
HkNQQ
(5.12)
where Nf is the total number of flow channels in a flow net, Nf = NFL – 1.

28
3.6. Uniform settlement of soil
We have discussed the dissipation of excess pore water pressure that would lead to an increase
in effective stress. Furthermore, as water leaving the pore space, the sample’s volume reduces and
this process is called consolidation. The flow rate of the transient flow and the compression rate of
the soil sample will decrease with time. Here, we will not discuss the time scale of the consolidation
process but rather focus our discussion on the initial (original, before loading) state and the “final”
state of the sample under the new loading condition. The word “final” is used here to indicate the
final stage of the consolidation process when the excess PWP has been completely dissipated.
Volume reduction of soil would lead to settlement on the ground surface or settlement at the base
of the foundation system. It is one of the major objectives in foundation design to keep the
settlement in control. Excessive settlement will cause damages to the building or at least reduce its
serviceability. Unequal settlement between different parts of the same building is of particular
importance as it can cause tilting (think about the famous Pisa tower in Italy as an example!) or
structural failure of the load bearing components (e.g. beam, column) of the superstructure.
Figure 6.1: Volume change due to an increase in effective stress
Figure 6.1 shows a diagram of a fully saturated soil sample subjected to an increase in the
effective vertical stress. As the solid particles and water are incompressible, the volume change is
equal to the volume of water squeezed out of the void space. The volume change in relative to the
initial volume (or the volumetric strain) can be calculated as:
0000
0
1 e
e
v
v
V
V
V
VVv +
∆=
∆=
∆=
−=ε (6.1)
where εv is the volumetric strain; V0, e0 and ν0 are the initial volume, initial void ratio and initial
specific volume (ν = 1 + e), respectively; V, e and ν are the corresponding parameters for the sample
after the application of the stress increment. From Eq. 6.1, εv has positive value when V < V0 in the
case of compressive behaviour; for the reverse case of V > V0, we have εv < 0 and the behaviour is
dilative. Figure 6.2 compares a soil sample in the initial condition (V0) and in its deformed state (the
shaded area, V) after an increment in the vertical stress. The two deformed samples in Fig. 6.2b and
6.2c have the same volume V, although lateral strain is involved in only one case (6.2b).
Consolidation settlement of soil is normally calculated based on the assumption of no lateral strain
(6.2c), which is true when the width of the loading area is significantly larger than the thickness of
the soil layer. As the deformation only occurs in the vertical direction in Fig. 6.2c, it is called one

29
dimensional settlement. One dimensional settlement can also be reflected as the uniform
settlement of horizontal soil strata during the sedimentation process, in which the weight of the
overlying material tends to compress the underlying layer.
Figure 6.2: Compressive behaviour with and without lateral strain
For the case of one dimensional settlement, Eq. 6.1 can be rewritten as follows:
000 1 e
e
H
H
V
Vv +
∆=
∆=
∆=ε (6.2)
where H and H0 are the current and the initial height of the sample; ∆H (=H0 – H) is commonly
referred as the vertical settlement (or just settlement). From Eq. 6.2, the settlement of soil can be
determined if we know the initial thickness (H0) of the layer (the “field-equivalent” to the sample’s
height) and the volumetric strain (= change in void ratio/initial void ratio). The change in void ratio,
on the other hand, depends on the stress increment and the properties of soil. The relationship
between stress and strain for soil is very complex, and usually needs to be determined from
experiments. Tests are conducted on undisturbed soil samples extracted from the ground, and on
samples reconstituted from natural soil in the laboratory; soil parameters used in geotechnical
design can then be obtained based on the measured stress-strain behaviour from the tests.
Figure 6.3: A typical experimental relationship between void ratio and effective vertical stress
Figure 6.3 shows a typical experimental relationship of e-σ’v obtained for one dimensional
compression. We can see that an increase in vertical stress (∆σ’ = σ’B - σ’A) would compress the
sample and lead to a reduction in void ratio (∆e = eB - eA). The stress-strain behaviour of soil in Fig.
6.3 is highly non-linear. The slope of the tangent to the curve decreases at higher stress and at
smaller void ratio, which means soil in denser state is less compressible. Using the compression
curve, we can predict the one dimensional compressive behaviour of soil in engineering application,
a) b) c)

30
of which the applied load and the in-situ stress condition should fall within the range of (σ’A,σ’B).
Note that if the applied load could not fit in the stress range in the experiment, the prediction is
unreliable; and you should be aware of this problem. Considering a small stress increment in Fig. 6.3,
the compression curve can be approximated as a straight line, the change in void ratio can be
calculated as:
vvae 'σ∆=∆ (6.3)
where av is the slope of the curve. Equation 6.3 can also be written as:
vvvv
v me
a
e
e''
11σσε ∆=∆
+=
+∆
= (6.4)
Here mv is called the coefficient of volume compressibility and can be interpreted as the
volumetric strain over an increased unit of stress. From Eq. 6.2 and 6.4, if we know the original
thickness of the soil layer H, the vertical settlement of the soil layer can be calculated as:
HmH vv 'σ∆=∆ (6.5)
The values of mv have been obtained for different soil types are as follows:
Example 6.1: From the measured stress-strain curve in the figure below, estimate the vertical
settlement of a 25 metres thick layer of the same soil due to an increase in vertical stress of 100 kPa
knowing that the unit weight of soil is 20 kN/m3 and assuming there is no water involved.
Answer:
Consider the middle point of the layer, the original vertical stress is:
Table 6.1: Typical values of mv (Smith & Smith, 1998)
σv (kN/m2)

31
σ1 = γh = 20 * 12.5 = 250 (kPa)
New vertical stress due to the 100 kPa stress increment:
σ2 = σ1 + ∆σ = 250 + 100 = 350 (kPa)
According to the stress-strain curve, the values of void ratio corresponding to σ1 and σ2 are: e1 =
0.666 and e1 = 0.658; the coefficient of volume compressibility can be calculated as:
/kN)(m 108.4100
1
666.01
658.0666.01
1
25
1
21 −×=×+
−=
∆×
+−
=v
ve
eem
σ
The vertical settlement of the 25 metres thick layer can be determined as:
(cm) 12 (m) 12.025100105.4' 5 ==×××=∆=∆ −HmH vv σ

32
3.7. Oedometer test & measurement of soil stiffness
Figure 7.1: Cross section of a standard oedometer
Oedometer test is a common laboratory test used to determine the stress-strain behaviour in
one dimensional compression; Fig. 7.1 diagrammatically shows the cross section of a standard
oedometer. A small and thin soil sample (generally 75 mm in diameter and 20 mm in thickness) is
prepared inside a rigid steel ring, which can prevent lateral expansion of the sample during
compression. Two porous stones are placed at the top and the bottom of the sample to serve as the
free drainage boundaries for the dissipation of excess PWP. The vertical load is applied onto the
loading plate on top of the sample. The whole sample is immersed in water inside an open cell to
make sure the sample maintains fully saturated during the test. Loading is applied in stages; the
range of the applied stress in the experiment should cover the expected stress range at the site. As
the load is applied, excess PWP is generated inside the sample and then gradually dissipated when
water is squeezed out through the two porous plates. This process normally takes time depending
on the permeability of the tested soil. Each loading step is usually kept for 24 hours; the vertical
movement is monitored by dial gauge. Reading is made more frequently at the beginning of the each
loading step as the compressive rate is higher in this range (i.e. the compression curve is steeper).
Reading is continued until there is no further change can be observed before the next loading stage
can be applied.
Figure 7.2: Loading and unloading in oedometer test
Figure 7.2 shows the typical stress-strain behaviour of soil from oedometer test; the curve is
similar to Fig. 6.3 but the loading condition here is more complex. Soil sample is compressed from a
relatively loose initial state (point A) until the curve reaches point B. The sample is now unloaded by
removing the applied load and returning the effective stress to its original value. The unloading
stress-strain curve follows a new branch to point C instead of going back to point A. The change in
void ratio ∆e(B→C) is much smaller than ∆e(A→B), which means volume reduction is mostly

33
irreversible. For the sample at point C, the value of σv is not the maximum stress value that the
sample has ever experienced. Instead, σvB is the maximum historical stress, and it is called
preconsolidation stress or σp/c. For a stress condition on the BC branch, σv < σp/c, soil is referred as
overconsolidated; and the BC branch is called the overconsolidation line. Soil on the A→B branch is
normally consolidated as the current stress is also the maximum stress that soil has experienced.
The reverse way from B→A is not possible in oedometer test, and point A will never be reached
again. The ratio between σp/c/σv is referred as the overconsolidation ratio (OCR), for normally
consolidated soil OCR = 1, and OCR > 1 for overconsolidated soil.
If the sample at point C is now recompressed, the curve will go back to point B on the same BC
branch and then it will move on the extension part of the AB curve as if the sample has been
continuously loaded from A to D. Figure 7.2 shows that the sample is subjected to two more loading-
unloading cycles until the test is terminated at point F. The ABDF part corresponds to the loading
stages and is called the normal compression line (NCL), whereas BC, DE and FG are three
overconsolidation lines representing the unloading and recompression stages. Comparing the
behaviour of soil on the NCL with the behaviour on the overconsolidation line under a same stress
increment, we can see that soil has much higher volume reduction on the NCL. This has an important
engineering implication. If we could somehow preload the ground temporarily to a high enough
stress and then unload it before the construction of the real structure, then the vertical settlement
of the real structure later will be much less because a large part of the compression curve would
occur on the overconsolidation line. In this way, we convert a normally consolidated soil to an
overconsolidated soil; this technique is called preloading and is a method of ground improvement.
Figure 7.3: Compression curve in semi log plot
It is a more common practice that the oedometer test result is plotted with the abscissa in
logarithm scale as shown in Fig. 7.3. In this way, we could cover a much wider stress range. The
loading stage, now, can be represented by a straight line. The unloading and reloading stages also
follow another straight line. The slope of the overconsolidation line is smaller than the slope of the
NCL, which describes a smaller compressibility for overconsolidated soil. The preconsolidation stress
can be defined at the intersection of these two lines as shown in the figure. From Fig. 7.3, two
parameters can be derived for the calculation of the vertical consolidation settlement; one is called
the compression index, Cc, which is simply the slope of the NCL, the other parameter is the swelling
index, Cs, or the slope of the overconsolidation line. Note that the overconlidation lines are in
parallel (see Fig. 7.2) so only one value of Cs is obtained from the test results. Furthermore, unlike
the parameter mv that varies according to the stress value, Cc and Cs are not affected by the applied

34
stress and hence it can be used in different engineering applications. The change in void ratio for a
soil sample going from point A to point B can be obtained as follows:
+
=∆+∆=∆
cp
Bc
A
cp
sBA CCeee/
10
/
10 loglogσσ
σ
σ (7.1)
Here the total void ratio change ∆e is separated into two parts: ∆eA when soil is overconsolidated,
and ∆eB when soil is normally consolidated as the applied stress exceeds the preconsolidation stress.
The parameters Cs and Cc can then be used for the calculation of ∆eA and ∆eB, respectively. The
consolidation settlement can be determined as:
++
+=
+∆
=∆
=cp
B
A
c
A
cp
A
s
A
ve
C
e
C
e
e
H
H
/
10
/
10 log1
log11 σ
σσ
σε (7.2)
Hence,
H
e
CH
e
CH
cp
B
A
c
A
cp
A
s
++
+=∆
/
10
/
10 log1
log1 σ
σσ
σ (7.3)
Note that if there is no information on the preconsolidation stress, we should assume soil is
normally consolidated. This is a safe assumption, as settlement will be greater when soil is
compressed along the NCL.
Example 7.1: A 6 metres thick clay layer with the water table at the ground surface is subjected to a
stress increment of 150 kN/m2. If the preconsolidation stress is 100 kN/m
2, estimate the overall
settlement knowing that γ = 20 kN/m3, Cc = 0.3, Cs = 0.06, and e = 1.0.
Answer:
Consider the middle point of the clay layer:
σ1 = γh = 20 * 3 = 60 (kPa) ; u1 = γwh = 10 * 3 = 30 (kPa)
σ’1 = 60 – 30 = 30 (kPa)
New vertical stress due to the 150 kPa stress increment:

35
σ’2 = σ’1 + ∆σ = 30 + 150 = 180 (kPa)
Change in void ratio due to the stress increment:
106.0075.0031.025.03.052.006.0
100
1803.0
30
100log06.0
'log
'log
/
10
/
10
=+=×+×=
+
=
+
=∆
cp
BC
A
cp
R CCeσσ
σ
σ
Vertical consolidation settlement of the clay layer can be determined as:
( ) (cm) 32 (m) 32.0053.0611
106.061
==×=+=
+∆=∆
AeeHH

36
3.8. Shear strength criterion for soils & Mohr’s circle diagram
In this section, we will discuss the failure criteria for soils. In general, soil can fail in both tension
and shear modes, although shear failure is the more common type of failure encountered in
geotechnical problems. Shear failure occurs when different parts of a soil mass sliding relatively to
each other. Sliding movements usually occur within a thin band of the soil body, which is called the
failure plane (or shear band). Tensile failure, on the other hand, is often associated with fracture and
opening cracks, which is more common for rocks. The shear strength of soil comes from the
accumulation of frictional resistance at the contact points as soil is an assembly of particles. This
means shear strength is a function of effective stress; a change in pore water pressure to some
extents could trigger shear failure in soil. In addition, compact soil to denser state increases the
number of contact points and the interparticle contact forces, and this could lead to higher shear
strength. For clays, attractive surface forces could also contribute to the shear strength of soil.
Figure 8.1: Frictional resistance (Smith & Smith, 1998)
Figure 8.1 shows a stress diagram of a block resting on a horizontal surface, which is about to
move as it is being subjected to a horizontal force, H. In Fig. 8.1a, the block is in static condition and
the weight is counterbalanced by the vertical reaction force. In Fig. 8.1b, a horizontal force H is
applied to the block. If H is not too large, it can be offset by the friction force acting at the interface
and the block stays still. The reaction force, R, is now inclined and make an obliquity angle α with the
vertical direction. The frictional resistance is not limitless but is capped by a maximum force defined
as:
WWF φµ tan== (8.1)
where µ (= tanφ) is the friction coefficient, and φ is called the friction angle. These two parameters
are affected by the interfacial properties and can be determined by experiment. When the applied H
exceeds the maximum frictional force in Eq. 8.1, the block starts sliding relatively to the surface and
we have α = φ. Figure 8.1 can be used as an approximation for the stress condition at the contact
points between soil particles. At the contact point, H and W can be interpreted as the shear and
normal contact forces. Also, µ is a material property, which depends on particle shape, surface
roughness, mineralogy, etc…. Sliding may occur at contacts, which encourages rearrangement of
particles. When contact sliding is oriented along a preferred direction, a localized failure plane can
be formed and much larger relative movement can be accommodated. The onset of a failure plane
formation usually marks the overall failure of a soil sample or of a soil mass. In design, we need to

37
make sure the stress condition of the earth structure in its normal working condition is far from the
stress condition that can trigger the formation of a shear band.
The normal and shear components of stress acting on a plane passing through a particular point
in a soil mass will depend on the orientation of that plane. From the experiment, people measured
the orientation of the shear band and obtained a consistent angle between the failure plane and the
horizontal direction, the angle can be considered as an intrinsic property of soil. Based on this
observation, we could think that the combination of the stress components on the failure plane
should probably be the most critical one among all other possibilities. Furthermore, if soil is a
frictional material, the ratio of shear stress over normal stress on the failure plane should satisfy the
limiting condition in Eq. 8.1, that is τ/σn = tanφ.
Figure 8.2: Representation of stress condition at a point using Mohr’s circle (Smith & Smith, 1998)
Figure 8.2b shows a small soil element in a soil mass. If the whole soil mass is in static
equilibrium, so is a small element within it. Knowing the principal stresses σ1 and σ3 acting on the
horizontal and vertical planes in Fig. 8.2b, the shear and normal stress on a plane making an angle θ
with the horizontal direction can be calculated based on the condition of force equilibrium as:
θσσσσ
θσσ
τ
2
313
31
cos)(
2sin2
−+=
−=
n
(8.2)
The collection of all stress points satisfying Eq. 8.2 forms a circle as shown in Fig. 8.2a. The circle is
named Mohr’s circle after the person who originally developed the method, the radius and the
centre of the circle can be given as:
2
;2
3131 σσσσ −=
+= RS (8.3)
where S and R are the abscissa of the circle’s centre and the circle’s radius, respectively. The X-axis
and the Y-axis represent the normal stress and shear stress components. A Mohr’s circle can be
drawn if we know the stress components on two orthogonal planes, which form two symmetrical
stress points collinear with the circle’s centre (e.g., point A and point B in Fig. 8.2a). The Mohr’s circle
represents the locus of the stress condition on all possible planes passing through a common point in
a) b)

38
a soil mass. The common point can be represented on a Mohr’s circle by the pole point. In Fig. 8.2a,
if we draw a vertical line at point A to depict the plane that σ3 acting upon and a horizontal line at
point B to depict the plane that σ1 acting upon, then these two lines crossing each other at point A.
Point A, hence, is the pole point of the Mohr’s circle in Fig. 8.2a. Using Mohr’s circle to find the stress
components on the inclined plane in Fig. 8.2b, we can draw a plane passing through the pole point A
and making an angle θ with the horizontal direction. The plane intersects the circle at point D; the
stress components can then be obtained as the coordinates at the point and actually give the same
results as in Eq. 8.2. For the stress condition at point D, connecting the point with the origin, we
have:
nOE
DE
στ
α ==tan (8.4)
From Fig. 8.1, we know that if α = φ, sliding can occur. In other words, using Mohr’s circle, we need
to search for the failure plane as a plane with maximum obliquity angle α.
Figure 8.3: Failure envelope and orientation of the failure plane (Smith & Smith, 1998)
In Fig. 8.3a, we can see that the angle of obliquity α is maximum when OD becomes the tangent
to the circle. If the stress circle corresponds to the stress condition at the failure state of soil, the line
OD can be referred as the failure envelope and the angle DOA is referred as the friction angle of the
material, φ. For a soil sample with vertical stress σ1 greater than horizontal stress σ3, the failure
plane is formed at an angle of (45° + φ/2) to the horizontal plane as shown in Fig. 8.3b. Note that the
shear stress on the failure plane is smaller than the maximum shear stress, which means soil fails in
terms of maximum stress obliquity but not in terms of maximum shear stress.
Figure 8.4: Determination of failure envelope from experimental data (Smith & Smith, 1998)
a) b)
c

39
The failure envelope of soil is usually determined from experiment. Samples are prepared and
sheared at different confining pressures (i.e. σ3 as shown in Fig. 8.3b). The effect of confining
pressure (σ3) is similar to the effect of the normal force W in Fig. 8.1b. Larger H is required to move
the block at larger W; the friction angle, however, does not change as long as the interfacial
properties remain the same. The stress circles at the failure condition for samples with different σ3
are shown in Fig. 8.4. The failure envelope can be determined as the best common tangent drawn to
all three stress circles, of which the equation can be given as:
φστ tannc+= (8.5)
Equation 8.5 is called Mohr-Coulomb failure criterion for soil. Here, c is the cohesion, which
describes the shear strength of soil at zero normal stress; we usually have c > 0 for clays. Note that
shear strength of soil is a function of the effective stress but not of the total stress, hence, Eq. 8.5
needs to be rewritten in terms of effective stress as:
'tan'' φστ nc+= (8.6)
Here, c’ and φ’ are the effective cohesion and effective friction angle, and they are usually
referred as the shear strength parameters of soil. Note that shear stress, τ, is the same in terms of
both effective stress and total stress. For example, considering the shear stress acting on a 45° plane
(i.e. at the apex of the circle), we have τ’ = (σ’1 - σ’3)/2 = (σ1 - u - σ3 + u)/2 = (σ1 - σ3)/2 = τ.
Figure 8.5: Failure envelope in terms of effective stress and total stress (Aysen, 2002)
Figure 8.5 shows the total stress Mohr circle and the effective stress Mohr circle for a soil sample
at failure condition. The two circles are separated by the value of PWP, u. Note that the effective
stress circle is on the left, which means u is positive as σ’ = σ - u. In addition, the two circles have the
same radius because R’ = (σ’1 - σ’3)/2 = (σ1 - u - σ3 + u)/2 = (σ1 - σ3)/2 = R. Different tangential lines
can be drawn to each circle, and hence we have two sets of shear strength parameters (c,φ) and
(c’,φ’). Geotechnical engineers should always use the effective strength parameters (c’,φ’) in stability
analysis of earth structures. The total strength envelope is only applicable when there is no
measurement of PWP, and also for the case of fully saturated clays in undrained loading condition
(further details will be given in Section 10).

40
3.9. Measurement of soil strength in laboratory: Direct shear test
Figure 9.1: Diagram of a direct shear box (Craig, 2004)
Direct shear test is a very common standard test in soil mechanics, in which the sample is
sheared along a predetermined horizontal plane. As the shear plane is predetermined, the test is
most suitable to measure the stress-strain behaviour at the interface between soil and other
materials (e.g., concrete foundation, steel sheet pile wall, etc.) or when there is a weak layer of soil
exists inside a stronger soil mass so the shearing movement leading to failure would likely to occur in
this weak layer. In the more general cases that the failure plane would develop along the plane of
maximum stress obliquity, then direct shear test is not a realistic presentation of the situation and
we need to refer to a more versatile test (e.g., triaxial test). Figure 9.1 shows a diagram of a direct
shear box, a thin soil sample (about 60x60x20 mm3) was prepared inside a split shear box. For fully
saturated samples, the shear box is put inside an outer box filled with water. Two porous plates are
placed at the top and bottom of samples to provide drainage boundaries to allow for water to drain
out of the sample. For dry samples, porous plates can be replaced by grooved thin metal plates,
which can help to minimize slippage at the interface. Normal force in terms of dead weight is applied
to the loading plate on top of the sample. The upper half and the low half of the split box can be
slightly separated to eliminate friction between the upper and the lower boxes, and then shear
displacement is applied so the two halves is forced to move in opposite directions. During the
shearing process, vertical and horizontal displacements as well as shear force are usually monitored
by dial gauges and load transducer. Based on the measurement, the following parameters could be
determined from the test:
• Normal stress: σ = N/A
• Shear stress: τ = T/A
• Shear strain: γ = ∆l/h0
• Vertical strain: εver = ∆h/h0
• Volumetric strain: εvol = εver = ∆h/h0
• A: area of the shear box (& soil sample)
• h0: initial thickness of soil sample
Shearing plane

41
Samples of different densities can be prepared and tested at different confining pressures (by
changing the value of N applied on top of the sample). Furthermore, different loading conditions can
be considered. For sands, because of the high permeability, sands are normally sheared in drained or
dry conditions, the shearing rate is about 1 mm/min. For clays, because of very low permeability,
clays can be tested in either undrained or drained conditions. For undrained condition, the sample is
sheared quickly (shearing rate is about 1 mm/min), so that there is not enough time for water to
drain out and the excess PWP can not be dissipated. For drained condition, a much slower shearing
rate is required such that no excess PWP is generated during shearing, and it could take a few days
to complete the test. The direct shear test results on a few typical soils in different loading
conditions are as follows:
� Direct shear test results on sand:
Figure 9.2: Direct shear test results on sand (Das, 2007)
Figure 9.2 plots the results of direct shear test on sand sample of different densities (loose,
medium dense and dense). We can see that the stress-strain curve of dense sample in Fig. 9.2a
(small void ratio) comprises of two parts, an initial part where stress increases with horizontal
displacement until a maximum stress value is obtained. This type of behaviour is called strain
hardening, and the maximum stress is called peak stress (or peak strength). After the peak stress,
stress decreases until the curve reaches a horizontal plateau at large displacement; this type of
behaviour is called strain softening. As the samples become looser (dense→medium→loose), the
softening behaviour becomes less prominent and eventually disappears in loose sample.
Furthermore, the effect of initial densities is suppressed at large displacement as all samples
approach the same stress value. When this occurs, the samples are at the ultimate condition, and
the ultimate stress value is called residual strength. Shear displacement can be increased further
without any change in the ultimate stress values since the two upper and lower halves behave like
two rigid blocks sliding relatively to each other. Figure 9.2b plots the corresponding volumetric
behaviour to the stress-strain curves in Fig. 9.2a. Dense and medium dense samples show some little
initial compression (volume reduction) and then the samples dilate (volume expansion) until the end
of the test. Loose sample, on the other hand, does not dilate but compress all the way to the
ultimate state.
a) b)

42
Figure 9.3: Maximum dilatancy and ultimate (or critical) void ratio (Craig, 2004)
We can see in Fig. 9.2a that the strength of the dense sample is higher than of the loose sample
(peak stress > ultimate stress), and this is due to the effect of interlocked sand particles in dense
sample. Since there is not enough void space to allow for free rearrangement of the particles in
dense sample, the particles need to climb over each other and this leads to volume expansion or
dilatancy behaviour of dense sand. The extra energy required in this process is reflected in the
increased shear stress of the stress-strain curve. The peak stress is obtained at the maximum rate of
dilatancy (dεv/dγ) as shown in Fig. 9.3a. Volume expansion does not happen for loose sample as
there is more than enough void space inside the sample to allow for free rearrangement of particles.
As shearing movement is applied, the granular structure of loose sample can even collapse leading
to volume reduction. Both dense and loose samples will approach the same void ratio at the
ultimate state (Fig. 9.3b), and the samples can be continually sheared at constant volume (ecv), and
constant shear stress (τcv).
Figure 9.4: Effect of confining pressure on the stress-strain behaviour of sand (Craig, 2004)
The test results in Fig. 9.2 and 9.3 are for samples of different initial densities but subjected to
the same confining pressure. Figure 9.4, on the other hand, shows the test results on replica samples
at different confining pressures. Increase confining pressure would suppress dilatancy behaviour of
the sample. Under large enough confining stress, dense sample could have only strain-hardening
behaviour; whereas under small enough confining pressure, loose sample can dilate. Note that very
high confining stress could cause particle breakage. As particles break, new degrees of freedom are
created for particle rearrangement, and volume expansion is reduced. The overall behaviour is very
complex as all different mechanisms could happen at the same time, and particle breakage is still an
on-going research topic in soil mechanics. The stress values at the peak and at the ultimate state can
be plotted in the (τ,σ’) space, the Mohr-Coulomb failure envelopes can be obtained by adding the
best fit lines to the data points as shown in Fig. 9.5. The intercept and the slope of the line give you
the value of cohesion and friction angle. Note that for clean sand, cohesion is usually zero so the line
passes through the origin. The peak strength should correspond to higher friction angle (φ) as
compared to the friction angle obtained at the ultimate state (φcv).
a) b)
a) b)

43
Figure 9.5: Mohr-Coulomb failure envelopes from direct shear test (Das, 2008)
� Direct shear test results on saturated clays in undrained condition:
Figure 9.6 shows the test results for saturated clay in undrained loading condition. There is no
volume change because water can not drain out of the sample. Instead, there would have change in
pore water pressure. However, since PWP is not measured in standard direct shear test, the only
test result is the stress-strain curve in terms of total stress. Figure 9.6 plots the stress curve for
undisturbed sample and remoulded sample. Undisturbed sample is the soil sample collected from
the site and carefully preserved in its original condition. Remoulded sample is usually created from
the soil of undisturbed samples after the test. Natural soil structure and interparticle bonding are
completely destroyed in remoulded samples. Remoulded sample behaves as strain hardening with a
small ultimate strength of about 5 kPa. The peak strength of undisturbed soil is much higher (cu = 40
kPa). The residual strength of undisturbed sample (cult = 25 kPa) is also above the strength of
remoulded sample. Undrained test is very common for clays as it reasonably represents the
condition of soil during the construction period. The consolidation process of clays occurs over much
longer time beyond the construction period, so drained test is only suitable for long term stability
analysis.
Figure 9.6: Direct shear test results on saturated clay in undrained condition (Bardet, 1997)
� Direct shear test results on saturated clays in drained condition:
Figure 9.7a plots the stress curve of an overconsolidated clay sample under drained test. Note
that the test may take a few days to complete due to the low permeability of clay and to ensure
there is no excess PWP is generated during shearing. The curve resembles the result of dense sand in

44
Fig. 9. 2a, which comprises of two parts: an initial hardening curve and then followed by a strain
softening behaviour. If density plays an important role in granular soils, then the same level of
importance can be assigned to the role of overconsolidation ratio in clays. Overconsolidated clays
(OCR > 1) behave similarly to dense sand with the existence of a peak stress and the dilatancy
behaviour, whereas normally consolidated clays (OCR = 1) behave like loose sand with compressive
volume change during shear. Furthermore, Fig. 9.7b shows that the Mohr-Coulomb envelope of OC
clay has a positive cohesion (c > 0). For NC clay, the envelope passes through the origin and so c = 0.
Figure 9.7: Direct shear test results on saturated clay in drained condition (Das, 2006)
a) b)

45
3.10. Measurement of soil strength in laboratory: Triaxial test
Figure 10.1 describes the stress condition at a point under the ground, which requires knowing
all the stress components on three orthogonal planes. Since soil deposition occurs vertically, the
vertical axis is usually the symmetrical axis for soil, so we could have: σx = σy, where σx and σy are
the normal stresses acting on the horizontal plane. Any new load applied on the ground surface (e.g.
the point load P in Fig. 10.1) would lead to changes in the stress components at the point. The stress
increments will depend on the characteristics (area, distribution, etc.) of the applied loads, soil
properties and the location of the point in relative to the loading area. It is obvious that the stress
condition as shown in Fig. 10.1 is not the stress condition in direct shear test. Stress condition at a
point under the ground is better represented in triaxial test.
Figure 10.1: Stress condition at a point under the ground surface (Das, 2006)
The cross section of a triaxial test apparatus is shown in Fig. 10.2a. A cylindrical soil sample
(typical size of 38 mm diameter and 76 mm height) was set upon a fixed pedestal. The sample is
covered by impermeable rubber membrane, which is sealed at the top and the bottom by O-rings.
Water, hence, can only be drained out of the sample through the porous plates at its two end faces.
The whole system of sample + loading cap + pedestal was put inside a transparent chamber. The
chamber is fully filled with water, and the water (outside the membrane) can be pressurized to
provide confining effect around the sample (referred as cell pressure). Inside the membrane, water
can flow in to saturate the sample through a small conduit inside the pedestal (referred as pore
pressure). There is a drainage valve installed on this water passage to block or to allow water going
in and out of the sample. Vertical load can be applied through a piston attached to the loading cap
on top of the sample. The following parameters can be monitored continuously during a shear test:
cell pressure (σ2=σ3 or σr), vertical displacement (→strain, ε1 or εa), vertical load (→stress, σ1 or σa),
and either the volume of water drained out of the sample (εv, if the valve is left open) or the value of
pore water pressure (u, if the valve is closed). Figure 10.2b describes the stress condition of a sample
in triaxial test, which includes an equal all-around pressure coming from the pressurized water inside
the chamber, and an axial stress together with its reaction as the result of the vertical applied load.
The effect of the cell pressure is similar to the confining effect of the surrounding soil to a soil
element inside the ground. The vertical stress can be interpreted as the extra load from the
construction activities.

46
Figure 10.2: Diagram of triaxial test apparatus and the simulating stress condition (Craig, 2004)
There are three common types of shear test with the triaxial apparatus:
• Consolidated – Drained test (CD test): once the sample is set upon the pedestal and the
chamber is filled with water, the cell pressure is increased gradually in stages until it reaches
a predetermined value (σc) that is usually chosen corresponding to the stress condition at
the site. The drainage valve is then opened to allow for water to drain out of the sample, the
volume of which is monitored and is equal to the reduction volume of the soil sample. When
the consolidation phase is complete, vertical stress is applied slowly (σ1 is increased) while
the drainage valve is kept open to let water going out. The sample is sheared at constant
confining pressure (σ3 = σc is kept constant) under the effect of deviatoric stress (σd = σ1 - σ3)
and no excess PWP is generated during the shearing process.
• Consolidated – Undrained test (CU test): the consolidation phase is similar to the CD test,
the shearing phase, however, is carried out under undrained condition. This means the
drainage valve is closed and water can not drain out. The sample’s volume does not change,
and excess PWP is built up inside the sample. The value of PWP is measured during the
shearing phase.
• Unconsolidated – Undrained test (UU test): as soon as the confining pressure is applied, the
sample is sheared. The drainage is closed and no volume change occurs during the
experiment. The test is done very quickly, and there is not enough time for excess PWP to be
distributed evenly within the sample, PWP is generally not measured in the test.
Figure 10.3: Changes in the dimensions of soil sample during triaxial test (Bardet, 1997)
a) b)

47
The values of stress and strain during the triaxial test can be determined as:
• During the consolidation phase:
( )
( )
phaseion consolidat theof end at the 0
2
1
as 02
1
3/1
/1
3
11
;
31
3131
0
00
0
0
0
0
=
=+=
===−=
∆−∆−
==
∆−=
∆=∆−=
u
s
t
VV
VVA
H
VA
V
VHH
V
VVVV
c
c
c
c
c
cc
cc
cvcc
σσσ
σσσσσ
ε
• During the shearing phase:
( ) ( )[ ] ( )
( )
( ) ( )( )[ ] usuus
ts
A
Ptuut
V
V
H
H
HHHVVV
AH
VA
c
v
c
cc
vc
−=−+−=
+=+=
==−=−−−=
+=∆
=∆
=
∆−=∆−=
−−
==
31
331
3131
311
1
2
1'
2
1
2
1
2
1'
2 ;
;
1
1
σσ
σσσ
σσσσ
εεεε
εε
Figure 10.4: Typical results of CD and CU tests on clays (Craig, 2004)
Figure 10.4c and 10.4d describe the behaviour of NC clay and OC clay under drained condition.
We can see that the behaviour of NC clay is purely strain-hardening with compressive volumetric
strain, whereas for OC clay it has significant dilatancy with strain softening occurs after the peak
stress. Compare with the undrained behaviour in Figs. 10.4a,b, compressive volumetric strain (in
Figs. 10.4c,d) would tend to increase PWP (u>0, Figs. 10.4a,b); volume expansion, on the other hand,

48
decreases PWP. Increasing the OCR value, then OC clay behaves in a similar way to denser sand;
volume expansion could even lead to negative PWP. If the drainage valve is opened at the end of the
undrained test on OC clay, the negative PWP can suck water into the sample. The peak stress and
the ultimate stress values can be used to determine the strength envelope as similar to Figs. 9.5 and
9.7. We will, however, focus more on the strength envelope obtained in UU test.
Figure 10.5: Strength envelope from UU test on saturated clay (Das, 2006)
We have known that consolidation could make soil a stronger material as the sample is in denser
state. In UU test, consolidation does not take place as drainage is not allowed regardless of how
large the confining pressure is. Consequently, it would be reasonable to expect the strength of a soil
sample in UU test does not depend on the value of the confining pressure (σc). In Fig. 10.5, the stress
circle P represents the total stress condition at failure of soil sample 1, of which the corresponding
effective stress circle can be given as circle Q. The two circles P and Q are distanced from each other
by the value of excess PWP (∆ud). Note that since there is no measurement of PWP in UU test, circle
Q shown here is only for the demonstration purpose but can be impractical in real test. Now if we
consider another sample 2 created by subjecting sample 1 to a higher confining pressure σc2, then its
total stress condition at failure can be described by circle R. The two circles P and R are separated
from each other by the confining pressure increment ∆σ3 =∆σc = σc2 - σc1, which should be equal to
an increase in terms of PWP (∆uc = ∆σc = ∆σ3) because in undrained condition, any change in
confining pressure will be countered by an equivalent change of pore water pressure. The effective
stress circle at failure of sample 2 is still circle Q as: σ’3R = σ3R – uR = σ3R – (us + ∆uR) = σ3R – (0 + ∆ud +
∆uc) = σ3P – ∆ud = σ’3P, where us is the background static PWP that is negligible in normal triaxial test
procedure. Note that the circle P and R have the same radius, which means there is no strength
improvement due to the increase in confining pressure (∆σc). Drawing a tangent to the two Mohr
circles P and R, we can obtain a horizontal strength envelope in terms of total stress, which means
the friction angle in UU test is zero (φu = 0). The effective strength envelope shown in Fig. 10.5 is not
generally obtained from the test results of UU test but can be an overlaying line borrowed from the
test results of CD or CU test on the same sample. The discontinuous line in Fig. 10.5 represents the
total strength envelope for only sample 1, which is not trustworthy as we know that the true total
strength envelope should have φu = 0. The interception of the horizontal total strength envelope
with the vertical axis is referred as the undrained shear strength of saturated clays, cu.

49
Figure 10.6: Pore water pressure coefficient, B, under isotropic stress change (Craig, 2004)
To calculate effective stress, we need to know the value of PWP. However, we don’t always have
the facility for the measurement of PWP at the field and it would be useful if there is an empirical
relationship to describe the response of PWP to a change in the total stress values in undrained
condition. Based on the work by Skempton (1954), the excess PWP can be estimated as:
( )[ ]313 σσσ ∆−∆+∆=∆ ABu (10.1)
where A and B are called pore water pressure coefficients. Parameter A relates the PWP response to
a change in deviatoric stress (∆σd = ∆σ1 - ∆σ3), whereas parameter B relates the PWP response to a
change in isotropic stress state (∆σc). Figure 10.6a shows a soil specimen subjected to an equal all-
around pressure (i.e. σ1 = σ2 = σ3 = σc), the isotropic stress state is then increased by the same
amount ∆σ3 = ∆σc in all directions. In triaxial test, this can be done during the consolidation phase
when we close the drainage valve and increase the cell pressure. After leaving some times to ensure
PWP has been evenly distributed within the sample, we can check the new value of PWP, if the
initial PWP is zero, then this reading is equal to the excess PWP, ∆u. Parameter B can then be
determined as:
3/ σ∆∆= uB (10.2)
Figure 10.6b describes the variation of parameter B as a function of soil saturation ratio (Sr). For
fully saturated sample, B = 1, which means the increase of total stress is completely balanced by an
equivalent increase of PWP. However, for partially saturated soil, B < 1 and this is because the air
contained inside the void space is more compressible than water.
Figure 10.7: Pore water pressure coefficient, A, under deviatoric stress change (Craig, 2004)
a) b)
a) b)

50
Figure 10.7a shows a soil sample in the shearing phase, which is being subjected to an increase
in vertical stress ∆σ1, the horizontal total stresses remain the same or ∆σ2 = ∆σ3 = 0. In undrained
condition, pore water pressure should change accordingly, and the excess PWP can be estimated as:
1σ∆××=∆ BAu (10.3)
If the sample is fully saturated, B = 1 and ∆u = A*∆σ1. Figure 10.7b plots the variation of
parameter A obtained at the failure condition (Af) for fully saturated clays with different OCR values.
Highly overconsolidated clays (OCR > 4) have Af < 0, which means the increase in vertical stress could
generate negative PWP. This can be explained by the dilatancy of OC clays as shown in Fig. 10.4b and
d. The total excess PWP generated in both consolidation and shearing phases of a triaxial test can be
estimated as the sum of the excess PWP defined in Eqs. 10.2 and 10.3, which is formulated in Eq.
10.1. The values of parameters A and B for a soil can be determined from laboratory test; Eq. 10.1
can then be used to estimate (predict) the excess PWP resulted from the construction activities at
the site.

51
3.11. Lateral earth pressure
Retaining wall is one of the most common structures in geotechnical engineering. The main
function of the structure is to retain the soil mass behind its back. The displacement of the wall
needs to be strictly controlled to ensure the stability and serviceability of the infrastructures and/or
buildings constructed behind it. To analyse the stability of the wall itself, we need to know the value
of the lateral pressure acting on the wall due to the weight of the retained soil mass. We have, so
far, only discussed about the vertical stress at a point under the ground but not really mention about
the corresponding lateral pressure. And that is because the lateral stress acting on a soil element
within a horizontal soil strata is always balanced by the lateral stress acting on the elements next to
it and the forces cancel each other out. Consequently, there is no lateral strain within the ground
was involved during the sedimentation process (the process in which underlying soil layer is
compressed vertically by the weight of soils accumulated right above it). The lateral pressure
corresponding to the no lateral strain condition is referred as at-rest lateral pressure, which is
normally defined relative to the vertical stress as:
vh K '' 0 σσ ×= (11.1)
where K0 is referred as coefficient of at-rest earth pressure. For the cases of non zero lateral strain,
depending on the direction of the strain (tensile or compressive) that the lateral stress will decrease
or increase as compared to the at-rest value in Eq. 11.1.
Figure 11.1: Active and passive cases of lateral earth pressure behind a retaining wall (Craig, 2004)
Figure 11.1 shows a vertical wall retaining a soil mass behind a back. If the wall is in static
condition, the soil mass is at rest. The vertical stress a depth z below the ground surface can be
calculated by Eq. 3.1; the horizontal stress can be calculated by using Eq. 11.1 (we will discuss the
value of K0 later). Now, if there is a movement of the wall, the lateral earth pressure will change
accordingly. In the case that the wall moves away from soil, the soil mass will expand laterally and
the lateral stress will decrease; the vertical stress meanwhile remains the same. The reduction of
lateral stress will continue (and the corresponding stress circle will grow in size) until a point when
the Mohr circle touches the failure envelope, and the shearing plane can be formed along the plane
of maximum stress obliquity. In this case, the lateral pressure at the failure condition of the soil mass
is referred as active earth pressure.

52
Figure 11.2: Mohr circle, failure planes & resultant thrust of active pressure (Smith & Smith, 1998)
Figure 11.2a plots the Mohr circle at failure in active condition. The discontinuous circle is an
example of the initial at-rest stress condition; as lateral stress decreases, the circle increases in size
until it touches the failure envelope. Vertical and horizontal stresses are the major and minor
principal stresses, respectively. Point A is the pole point as it is at the intersection of two principal
stress planes. Based on the stress circle, there are two sets of the failure planes can be identified,
which make an angle of (45° - φ/2) with the vertical direction as shown in Fig. 11.2b. Similar to Eq.
11.1, the active pressure can be defined as:
vah K '' σσ ×= (11.2)
where Ka is the coefficient of active earth pressure. Using Fig. 11.2a, Ka can be determined as:
−°=+−
=+−
=+−
=+−
===2
'45tan
'sin1
'sin1
1
1
'
' 2
1
3 φφφ
σσ
OCDC
OCDC
DCOC
DCOC
CBOC
ACOC
OB
OAKa
(11.3)
As Ka is a constant, the horizontal stress increases linearly with depth z in similar way to the
vertical stress. The distribution of lateral stress on the wall is a triangle diagram as shown in Fig.
11.2c. The total horizontal force can be obtained by taking integration of σ’h with depth or (because
of the linear variation) simply as the area of the triangle stress diagram, which means:
22
1 2hKhKhP aaa
γγ =××= (11.4)
The horizontal active thrust passes through the centroid of the stress diagram, which is two
thirds of the total height below the ground surface as shown in Fig. 11.2c. The opposite case of
active pressure is passive pressure, in which the wall in Fig. 11.1 moving against the retained soil
mass. When this happens, the soil mass is compressed laterally and hence, lateral stress is increased
and becomes greater than vertical stress. The lateral compression will continue until the Mohr circle
touching the failure envelope. However, the horizontal stress, here, is the major principal stress, and
the vertical stress is the minor principal stress.
a) b) c)

53
Figure 11.3: Mohr circle, failure planes of passive pressure (Smith & Smith, 1998)
Figure 11.3a plots the Mohr circle for passive pressure, which is actually Fig. 11.2a rotated by 90
degree as now the horizontal stress becomes the major principal stress and vertical plane is the
major principal stress plane. The failure planes of passive pressure now form an angle of (45° - φ/2)
with the horizontal direction instead of the vertical direction as for the case of active pressure.
Figure 11.3a and 11.3b compare the failure planes of the two opposite cases of active and passive
pressures, which describes clearly the 90 degree rotation. Using Fig. 11.3a, the coefficient of passive
pressure can be determined as:
+°=−+
=−+
=−+
===2
'45tan
'sin1
'sin1
1
1
'
' 2
3
1 φφφ
σσ
OCDC
OCDC
DCOC
DCOC
OB
OAK p
(11.5)
The passive pressure can be defined as:
vph K '' σσ ×= (11.6)
And the passive thrust is (the shape of the stress diagram and the point of application are similar
to Fig. 11.2c):
22
1 2hKhKhP ppp
γγ =××= (11.7)
Figure 11.4: Development of active and passive pressures with lateral strain
a) b) Failure planes in the
case of active pressure
c) Failure planes in the
case of passive pressure
a) b)

54
Figure 11.4a shows a very common situation of a retaining wall, in which the wall is embedded in
the soil with a shallow soil layer placed in front of its toe at the opposite side with the retained mass.
If the wall in Fig. 11.4a moves to the right, then soil in front of the wall is compressed and the lateral
stress would increase until it reaches the passive condition. Soil behind the wall’s back, on the other
hand, expands laterally and would eventually satisfy the active condition. As the passive pressure
acts in the opposite direction with the movement of the wall, it could help to resist the movement
and improve the wall’s stability. Figure 11.4b describes the development of the active and passive
pressures with the magnitude of lateral strain. We can see that the active pressure is obtained at
smaller absolute strain as compared to the passive condition, which means soil behind the wall’s
back will fail earlier than soil at the front of the wall. Furthermore, the actual passive failure plane is
a curve instead of a straight line as it was assumed in the theoretical derivation (Eq. 11.5).
Figure 11.5: Lateral pressure due to surcharge (Craig, 2004)
It is very often that there is construction of infrastructure and/or building behind the retaining
wall. The load (is called surcharge) coming from these structures will contribute to the lateral force
acting on wall. If the surcharge pressure is distributed uniformly as shown in Fig. 11.5, the
correspond active (or passive) pressure can be calculated as σ’h = Ka*q (or σ’h = Kp*q). The lateral
thrust passes through the centroid of the rectangle stress diagram, which is at the middle point of
the wall (H/2). The lateral stress due to surcharge is calculated separately and added to the lateral
earth pressure due to the weight of the soil mass.
We have discussed the equations used to calculate active (Eq. 11.3) and passive (Eq. 11.5) lateral
pressures. Finally, we need to determine the value of lateral pressure at rest. The coefficient of at-
rest pressure can be determined using the following empirical relationships:
• NC soils: 'sin10 φ−=K (11.8)
• OC soils: 'sin
0 )'sin1( φφ OCRK −= (11.9)
where OCR is the value of the overconsolidation ratio. For example, Fig. 11.6 describes a typical
relationship between K0 and the OCR value of a clayey soil. We can see that for OCR greater than
about 3, K0 > 1 that means the vertical stress is smaller than the horizontal stress. On the other hand,
K0 < 1 for NC soil, which means σ’h < σ’v.

55
Figure 11.6: Coefficient of at-rest lateral earth pressure (Craig, 2004)

56
3.12. Stability of retaining walls
The derivation of the coefficient of lateral pressures in Eq. 11.3 and 11.5 are based on the
Rankine’s theory of earth pressure. In the Rankine’s method, it is assumed the principal stress
directions are the same everywhere as well as the failure condition is attained at every point within
the soil mass. For problems with more complex geometry, the principal stress directions would
change at each location. Furthermore, there is often only one major failure surface, the soil masses
at two sides of the surface tend to slide relatively against each other like rigid blocks, of which the
soil inside the block is much less deformed as compared to soil within the shear band.
Figure 12.1: Coulomb’s wedge and earth pressure acting on an inclined wall (Smith & Smith, 1998)
Figure 12.1 shows a retaining wall with the back inclined at an angle ψ with the horizontal
direction. The ground surface is also inclined at an angle β as shown in Fig. 12.1b. In addition, there
is shear stress acting at the interface between the wall and soil due to friction, which results in the
total thrust P making an angle δ with the normal to the back of the wall. In this case, the vertical and
horizontal directions are no longer the principal stress planes. The total thrust can be determined
using Coulomb’s wedge theory by considering the force equilibrium of the soil wedge between the
wall and the failure plane. In general, we don’t know the exact location of the failure plane, and
need to search for the direction that yields the maximum thrust on the wall (the worst scenario for
the stability of the wall). In Fig. 12.1a, the line BC represents the plane inclined at the friction angle,
φ, of soil. Soil below this plane is considered stable as the stress obliquity on any plane below the
plane BC is smaller than the maximum obliquity. Consequently, we should search for the failure
plane above the plane BC. For example, the forces acting on the wedge ABD in Fig. 12.1a are as
follows:
• The self-weight of soil (W): is equal to the volume (area in two dimensions) of the soil
wedge multiplied by the unit weight of soil. W always acts vertically.
• The active reaction of the wall on the soil wedge (Pa): inclines at angle δ to the normal of
the back of the wall; the angle δ is the friction angle of the interface between the wall
and the soil mass. Pa points upward as the soil wedge tends to slide downward relatively
to the wall in the case of active pressure.
• The reaction R acting on the failure surface: inclines at angle φ below the normal of the
failure plane as the wedge tends to slide downward. The angle φ is the friction angle of
the soil mass.
a) b)

57
Figure 12.2: Force diagram for the wedge ABD in Fig. 12.1a (Smith & Smith, 1998)
Knowing the inclination angles of the wall, the failure plane and of the ground surface, the
direction of all force vectors can be determined and they should form a closed force diagram as
shown in Fig. 12.2. As we know the values of the force diagram’s angles and the value of the self-
weight force W, the magnitudes of the other two forces Pa and R can be calculated using the law of
cosines in trigonometry. The plane BD is just one trial failure plane, we should repeat the calculation
for a numbers of selected trial planes to search for the maximum active thrust, Pa.
Figure 12.3: Construction of Culmann line to search for the maximum thrust (Smith & Smith, 1998)
Figure 12.3 describes a graphical method suggested by Culmann (1866), which can be used to
search for the maximum total thrust. The reaction force Pa is determined for four different trial
failure planes. The force diagrams of the four cases are drawn overlying on each other, the distance
Xdi is proportional to the area (the weight) of each soil wedge. The length eidi represents the
magnitude of the reaction force Pa, the locus of all points ei is a smooth curve called Culmann line,
which describes the variation of the total thrust with the direction of the failure plane. The
maximum thrust can be found be drawing a vertical line tangential to the Culmann line, the
maximum length ed obtained at the tangential point represents the maximum total thrust. The angle
e3Xe is equal to the angle EBG, so the corresponding failure plane can be defined (i.e. line BG in Fig.
12.3a).

58
Figure 12.4: Application point of the total thrust using the Culmann line (Smith & Smith, 1998)
The point of application of the total thrust in the Coulomb’s wedge theory can be determined as
shown in Fig. 12.4. A line can be drawn passing through the centroid of the failure wedge and in
parallel to the failure plane; the intersection of the line with the wall is the application point of the
total thrust. For a typical problem as shown in Fig. 12.1b, we have an analytical solution for the
Coulomb’s theory of earth pressure. The coefficients of earth pressures can be given as:
• Active pressure: vah K '' σσ ×=
22
1 2hKhKhP aaa
γγ =××=
( )
( ) ( ) ( )( )
2
sin
sinsinsin
sin
sin
−−+
++
−
=
βψβφδφ
δψ
ψφψ
aK (12.1)
• Passive pressure: vph K '' σσ ×=
22
1 2hKhKhP ppp
γγ =××=
( )
( ) ( ) ( )( )
2
sin
sinsinsin
sin
sin
−++
−−
+
=
βψβφδφ
δψ
ψφψ
pK (12.2)
The earth pressure based on the analytical solution of Coulomb’s theory in Eq. 12.1 and 12.2 can
be assumed to have a triangular distribution as similar to the Rankine’s theory. The application point
of the total thrust is given in Fig. 12.5 for different retaining walls. Note that while the active wedge
tends to slide downward, the passive wedge tends to move upward relatively to the wall. The
reaction force P acting at the wall interface and the reaction force R acting on the failure plane,
hence, should be oriented in the way that resists this type of movement of the passive wedge.

59
Figure 12.5: Application point of the active thrust for the analytical solution (Smith & Smith, 1998)
In the previous paragraphs, we discussed the derivation of lateral earth pressures using the
Coulomb’s wedge theory. The Coulomb’s theory not only provides a solution for complex geometry
problems but also shed some lights on how we could find the solution for an engineering problem. In
the case of active thrust, it was assumed that as the wall is moving away, a failure soil wedge will be
formed behind the wall. In other words, we need to assume a failure mechanism. The job of the
engineer is then to design the structure so that such a scenario will not happen for the real
structure. To come up with a failure mechanism, we can study the failure of similar real structures in
the past, or conduct test on small scale physical model of the real structure, or even do full scale
field test, etc. In the design process, we need to consider all the driving forces that may cause
instability, and ensure their impacts are less than the effects of the resistance forces that help to
stabilize the structure. Furthermore, a factor of safety is required, which means the structure is
designed with the allowable load as only a fraction (normally in the range of 30%∼70% depending on
the problem) of the estimated maximum resistance capacity. And this is to cover for any
uncertainties and to ensure the serviceability of the structure in its normal working condition (the
deformation level is within the acceptable limit so it does not affect the function of the structure).
Figure 12.6 introduces several failure scenarios of a gravity wall. Gravity walls are usually massive
and heavy walls as the stability comes from the self-weight of the wall; the frictional resistance at
the base of the wall helps to resist against the lateral thrust of the retained soil mass.
Figure 12.6: Failure modes of gravity retaining wall (Smith & Smith, 1998)
The wall in Fig. 12.6a fails as the whole soil mass surrounding it fails along a slipping surface; this
type of failure is usually assessed in terms of slope stability analysis, which means another problem
of bigger scale. Figure 12.6b describes the bearing capacity failure, which happens when the
overturning moment of the lateral thrust causes higher stress concentration below the toe of the

60
wall. The stress concentration could be over the bearing capacity of the soil beneath the wall; and
when the soil foundation fails, the wall could suddenly sink to the ground (not evenly) and topple
over. Figure 12.6c shows the horizontal sliding failure mode of the wall when the friction resistance
at the base is less than the lateral thrust. To avoid this, we can increase the weight of the wall
(increase W in Eq. 8.1), increase the roughness of the base (increase µ in Eq. 8.1) or embed the wall
into the ground in order to generate the passive resistance of soil in front of its toe. One also needs
to check the overturning failure mode to ensure the ratio between the overturning moment and the
restoring moment is within a safe limit (in terms of a factor of safety). Finally, the level of
deformation of the wall and the ground needs to be controlled to avoid failure of the structural
components of the wall and of the structures built behind it. Structural failures (cracks, etc.) could
cause deterioration of the design capacity and lead to progressive failure of the whole structure, or
at least reduce their serviceability for smaller damages. The overall stability of gravity wall needs to
be checked against:
• Overturning failure about the wall’s toe:
∑∑=
O
R
goverturninM
MFS (12.3)
where: FSoverturning is the factor of safety against overturning failure; the minimum value of FS
should be in the range of 1.5 – 2.0.
ΣMO is the summation of the moments that tend to overturn the wall about its toe, and
ΣMR is the summation of the moments that oppose the overturning movement.
• Sliding failure at the wall’s base:
∑∑=
D
R
slidingF
FFS (12.4)
where: FSsliding is the factor of safety against basal sliding failure; the minimum value is about 1.5.
ΣFD is the summation of the horizontal driving forces, and ΣFR is the summation of the
horizontal resistance forces.
• Bearing capacity failure of soil beneath the wall’s base:
maxq
qFS u
bearing = (12.5)
where: FSbearing is the factor of safety against bearing capacity failure; FS = 3 is generally required.
qu is the ultimate bearing capacity of soil beneath the wall (the calculation of qu is usually
covered in foundation design).
qmax is the maximum applied pressure, which can be determined as follows:

61
Figure 12.7: Bearing pressure due to gravity retaining wall (Smith & Smith, 1998)
In Fig. 12.7, RV is the total vertical force (the sum of the weight of the wall, the weight of soil and
any surcharge within the perimeter of the base); e is the eccentricity of the total vertical force, which
is the distance between the symmetrical axis of the base and the total vertical force. The eccentricity
can be calculated as:
V
OR
R
MMBe
∑∑ −−=
2 (12.6)
where B is the width of the base. Depending on the value of the eccentricity (e), the distribution of
bearing pressure can be separated into there cases as shown in Fig. 12.7. The maximum pressure in
the distribution (qmax) should be checked against the ultimate bearing capacity of soil (qu).