
SMART: A Scan-based Movement- Assisted Sensor Deployment Method in Wireless Sensor Networks Jie Wu...
28
SMART: A Scan-based Movement-Assisted Sensor Deployment Method in Wireless Sensor Networks Jie Wu and Shuhui Yang Department of Computer Science and Engineering Florida Atlantic University INFOCOM 2005
-
date post
21-Dec-2015 -
Category
Documents
-
view
219 -
download
3
Transcript of SMART: A Scan-based Movement- Assisted Sensor Deployment Method in Wireless Sensor Networks Jie Wu...
SMART: A Scan-based Movement-Assisted Sensor Deployment Method in Wireless Sensor Networks
Jie Wu and Shuhui Yang
Department of Computer Science and Engineering
Florida Atlantic University
INFOCOM 2005

Outline
Introduction Related Works Scan-based Movement-assisted Sensor
Deployment Method (SMART) Extended SMART Simulation Conclusion

Introduction
The efficiency of a sensor network depends on the deployment and coverage of the monitoring area.
A good sensor deployment is still necessary to balance the workload of sensors.
Two methods used to enhance the coverage after an initial random deployment Incremental sensor deployment
Deploys additional sensors Movement-assisted sensor deployment
Moves the existing sensors
Introduction
The sensor deployment problem can be viewed as load balance problem Partitioned small region processor Number of sensors in a region load
Two differences between deployment and load balance Different objectives: number of moves Different technical issues: communication hole
Introduction – Basic Idea
2D scan-based movement-assisted deployment The sensor network is partitioned into a 2-D mesh of
clusters Each cluster covers a small square area. The cluster is controlled by a clusterhead The clusterhead knows the cluster’s position i and the number of
sensors in the cluster Each clusterhead is in charge communication and bookkeeping Two scans ,once for rows and once for columns, are used to
calculate the average load and determine the overloaded and underloaded clusters.
Load is shifted from overloaded clusters to underloaded ones.
nn
iw

Introduction – Ideal Case Example
Scan in rows Scan in columns
Unbalanced State Balanced State

Introduction
Communication hole problem: the clusters with empty size can not communication with other clusters, so the scan approach can not be used.

Related Works (1)
Load balance in multiprocessor systems [13] [14] Diffusion: each node exchange load with all neighbors
: load in node i, j : adjacent node to i : diffusion parameter ¼ for fastest convergence [17] in 2-D mesh
Dimension Exchange: group adjacent edges to different four dimensions, two adjacent node by the edge exchange load.
: exchange rate
)(, )(
iadjjijjiii wwaww
jii www )1(
ji ww ,
jia ,
)(iadj

Related Works (2)
Movement-assisted sensor deployment Virtual force based mobile sensor deployment algorithm
(VFA) [6] Using the potential field to calculate virtual force
Voronoi diagram based sensor deployment algorithm [5] VEC: sensors calculate the virtual force form its Voronoi
neighbor VOR: sensors detect the coverage holes and move to its
farthest Voronoi vertex Minimax: sensors move to target position such that whose
distance to the farthest vertex is minimized

SMART - Clustering
Clustering cluster Each cluster covers square Sensing range: Intra-transmission range: Inter-transmission range: Each sensor knows its cluster id i Each clusterhead knows its load
xxnn
x2
x2
x5
x
n
x
Load (number of sensors) of a cluster

SMART – Scan (1)
Scan for 1-D array of clusters to calculate the load in the balance state : number of sensors in cluster i : prefix sum of the first i clusters : total sum : the average load (number of sensors) in a balanced state : prefix sum of the first i clusters in balanced state First scan calculates , second scan sends back and calculate
iw
iv
nv
w
ivw w iv
first
second
54nv
96/54 wDetermine state of each cluster Send backw

SMART – Scan (2)
Determine the “give/take” state of each cluster neutral state overloaded give state underloaded take state
Determine the shifted number of sensors Overloaded clusters
Give right: Give left:
Underloaded clusters Take left: Take right:
iiii wwww )(
}}0,max{,min{ iiii vvwww
}}0,max{,min{ 11 iiii vvwww
iiii wwww )(
0 wwi0 wwi0 wwi

SMART – Properties (1)
Theorem 1: Any violation of the four conditions on give and take state of each cluster will increase of overall moving distance and/or total number of moves to reach a load balanced state.
Proof: Condition 1: change a cluster i from take to give, the i gives unit to j, i still
have to get a compensate from k, it will increase the moving distance. Condition 2: change a cluster i form give to take, same as condition 1. Condition 3: cluster i mixes take-left with take-right
Condition 4: cluster i mixes give-right with give-left, similar to condition 3.

SMART – Properties (2)
Theorem 2: When take-right (take-left) states get load from give-left (give-right) states, the overall moving distance is independent of the actual schedule.
Proof: consider from give-left states. Cluster i is in take-right state and the closest give-left cluster is i’. But now the unit to i comes from not-closest cluster j’, and unit from i’ goes to j. The following figure shows the moving distance is the same.
jDiiDjjDjiDi ''''

SMART – 1D Load Balance algorithm Sender-Initiated Optimal Load Balance in 1-D Arrays
For each cluster i in give state, the clusterhead sends units to its right neighbor , and sends units to its left neightbor.
For each cluster j in take state, when the cluster head senses several bypassing units, it intersects as many units as possible to fill in its “holes”, Unintersected units move along the same direction.
iw
iw
SMART – Properties(3)
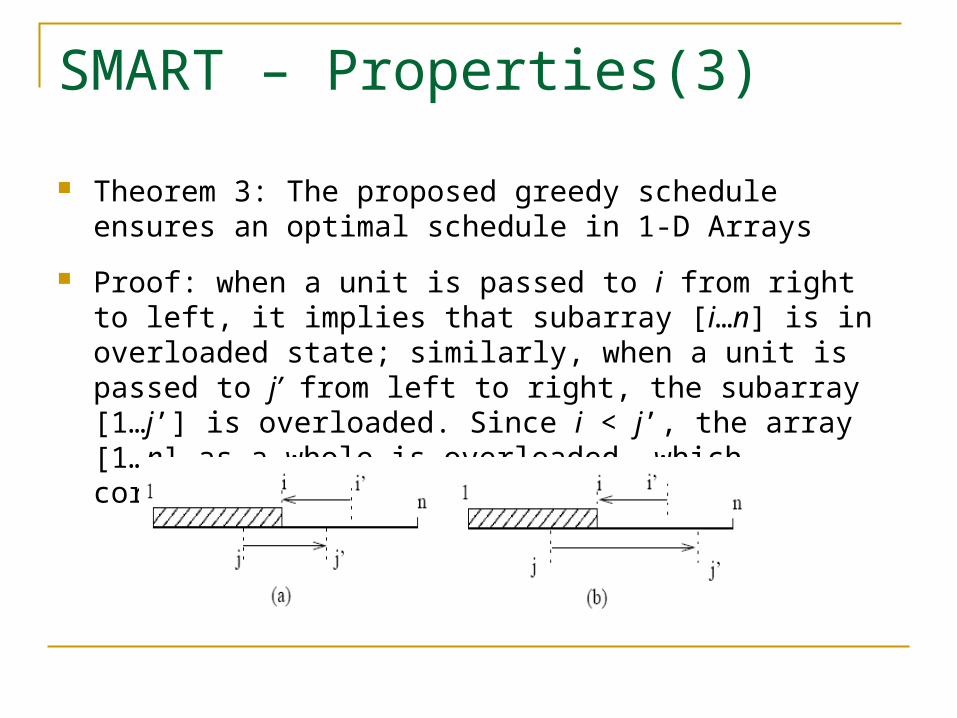
Theorem 3: The proposed greedy schedule ensures an optimal schedule in 1-D Arrays
Proof: when a unit is passed to i from right to left, it implies that subarray [i…n] is in overloaded state; similarly, when a unit is passed to j’ from left to right, the subarray [1…j’] is overloaded. Since i < j’, the array [1…n] as a whole is overloaded, which corresponds to a contradiction.

SMART – Extend 1D to 2D
Extend 1-D scan to 2-D Scan procedure is applied twice: rows and column
No longer optimal
Solution: the actual movement of sensors occurs after the columns scan. Only clusters in the overloaded state with respect to the global average send load.
3 1
3 5
2 2
4 4
3 3
3 3
Scan in Rows Scan in Columns
Moves +2 Moves +2
Total Moves: 4
Optimal Moves: 2
Extended SMART – Filling Holes Expansion for filling holes in 1-D arrays
Notations Segment Si : sequence of non-empty clusters Wi : summation load of Si Ci : length of Si
Li : expansion level of Si, 2Li < Ci < 2Li+1
Ei : energy level of Si, Ei = Wi - Ci
Doubling expansion for S Expansion sequence: 2Li, 2Li+1, 2Li+2,….. Expansion condition: Ei > 2Li+k
Example: Ci of Si is 13 , 23(8) < 13(Ci) < 23+1(16), Li = 3, expansion of the segment will be 8, 16, 32,…..

Extended SMART – Holes Solution Steps of communication holes solution
1. Following the positive direction, each segment performs expansion through recursive doubling until it either reaches (covers) the last cluster of the 1-D array or fails the expansion.
2. Repeat step 1. for the negative direction.

Extended SMART – Properties Theorem 4: in each segment S in a pre-processing scan,
the total moving distance in constructing S is bounded by C2 and the communication latency is bounded by 5C.
Theorem 5: assume the average load is at least 2 for each cluster. After the first pre-processing scan, at least one postfix of the 1-D array is a segment an all holes will be filled.
Theorem 6: suppose the average number of sensors in a cluster is at least 4. after column-wise smoothing, each row will have at least 2n sensors.
Extended SMART – Overall SMART Revised SMART
Step 1 (column-wise smoothing): Pre-processing (fill the communication holes) on column (positive direction). Then simultaneous pre-processing and scan (load balance) on column (negative direction). Then scan on column (positive).
Step 2 (row-wise pre-processing and scan): Pre-processing on row (positive). Then simultaneous pre-processing and scan on row (negative), finally scan on row (positive).
Step 3 (column-wise scan): Scan on column (negative followed by positive).
Simulation(1)
Environment Simulation area: 500 x 500 Cluster numbers: n x n, n = 4, 10 Sensor numbers: N = 400 ~ 1000 Initial deployment: random and normal distribution Normal distribution parameter o: o = 1 ~ 5

Simulation(2) Rounds comparison of DIFF, EXCH, and SMART

Simulation(3) Distance comparison of DIFF, EXCH, and SMART

Simulation(4) Balance degree comparison of DIFF, EXCH, and SMART

Simulation(5)
Balance degree comparison of DIFF, EXCH, and SMART by Grads
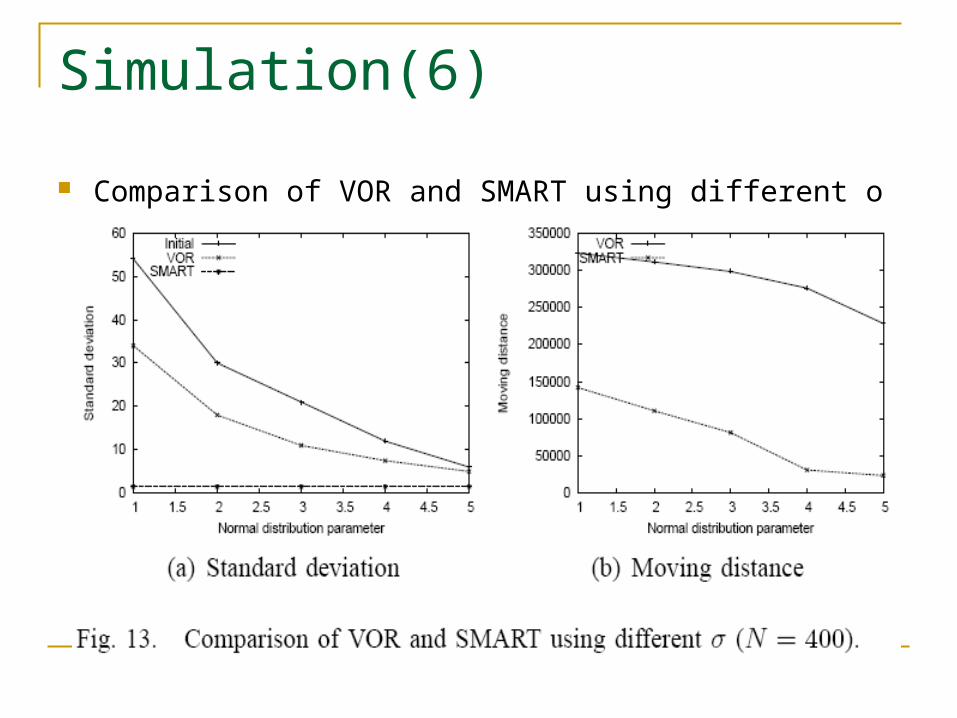
Simulation(6)
Comparison of VOR and SMART using different o

Conclusion
The paper have proposed a scan-based movement-assisted sensor deployment algorithm.
The algorithm also considered the communication hole problem.
The algorithm achieve even deployment with modest costs.
Future work contains intra-cluster balancing and depth simulation on energy consumption.














![jIE sIjv ]GQ](https://static.fdocuments.in/doc/165x107/60aaff4495c4fc343553ea02/jie-sijv-gq.jpg)

