Simulation of the Flow in a Damper Under External Magnetic ...
59
UNIVERSIDAD DE LOS ANDES Simulation of the Flow in a Damper Under External Magnetic Fields by Cristhian Eduardo Gonz´ alez Ortiz Advisor: Professor Omar L´ opez (Ph.D.) in the Faculty of Engineering Department of Mechanical Engineering August 2018
Transcript of Simulation of the Flow in a Damper Under External Magnetic ...

UNIVERSIDAD DE LOS ANDES
Simulation of the Flow in a Damper
Under External Magnetic Fields
by
Cristhian Eduardo Gonzalez Ortiz
Advisor: Professor Omar Lopez (Ph.D.)
in the
Faculty of Engineering
Department of Mechanical Engineering
August 2018

UNIVERSIDAD DE LOS ANDES
Abstract
Faculty of Engineering
Department of Mechanical Engineering
by Cristhian Eduardo Gonzalez Ortiz
A 2D axissymmetrical computational model for an specific commercial automotive shock ab-
sorber, under compression, is studied under the influence and absence of magnetic fields, with
the help of ANSYS Fluent. The effectiveness of this model to predict the damping force, within
a 5% error, is detailed. This model can predict the damping force of the shock absorber with an
error of 5% for inlet velocities between 0.5 and 0.9 m/s. Additionally, with the current damping
fluid there is no effect on the damping force when a magnetic field is applied. This fluid, the
POLAR damping fluid (Gabriel S.A.), does not have magnetorheological properties. As an
alternative for this fluid, the BASONETIC 2040 (The BASF Company) MR fluid is proposed.
This fluid has rheological properties that change when a magnetic field is applied. When this
MR fluid is simulated with the damper model, the damping force duplicates at an inlet velocity
of 0.65 m/s. Additionally, when the intensity of the magnetic field increases, the damping force
increases. Therefore, controlling the damping force via magnetic fields is feasible.
Keywords: Damper, shock absorber, Hartmann flow, Magnetohydrodinamics (MHD), MR fluid,
POLAR Fluid by Gabriel de Colombia S.A., BASONETIC 2040 by BASF Company
Resumen: El modelo axisimetrico de un amortiguador comercial es estudiado para entender
el efecto de aplicar un campo magnetico al amortiguador sobre su fuerza de amortiguamiento.
Primero, se determina una zona de validez del modelo donde la fuerza de amortiguamiento no di-
fiere del 5% con respecto a los datos experimentales, sin campo aplicado. Esta zona corresponde
al rango de velocidades de entrada entre 0.5 y 0.9 m/s. El fluido de amortiguamiento usado
actualmente, el fluido POLAR (Gabriel S.A.), no presenta propiedades magnetoreologicas,
por lo cual, la fuerza de amortiguamiento no cambia al aplicarle un campo magnetico a este
fluido. Sin embargo, se propone usar el fluido magnetoreologico BASONETIC 2040 (Companıa
BASF), el cual sı presenta propiedades magneticas. Al simular con este fluido, la fuerza de
amortiguamiento se duplica, sin campos magneticos. Al incrementar los campos magneticos, la
fuerza de amortiguamiento aumenta. Por lo tanto, al usar este fluido, controlar la fuerza de
amortiguamiento con campos magneticos es viable.

Contents
Abstract i
List of Figures iv
List of Tables vi
Abbreviations vii
1 Introduction 1
1.1 Previous work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 MHD and MR Dampers (State of the Art) . . . . . . . . . . . . . 4
1.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Theoretical Framework 7
2.1 A Brief Overview of Dampers . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Incompressible Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Mass Conservation . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.2 Momentum Conservation . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 MHD (Magnetohydrodynamics) . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1 Maxwell’s Equations . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.2 Ohm’s Law . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.3 MHD Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.4 Induced Magnetic Field . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Magnetorheological Dampers . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 The Hartmann Flow 18
3.1 Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.1 Mathematical Model . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Geometry and Mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Solver Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.1 Fluid properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.2 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.3 Solution methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Damper Without Applied Magnetic Fields 26
4.1 Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2 Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
ii

4.2.1 Determining the correct valve opening . . . . . . . . . . . . . . . . 29
4.2.2 Transient or stationary? . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3 Solver Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.1 Fluid properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.2 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.3 Solution methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.4 Mesh Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.5 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Damper With Applied Magnetic Fields 39
5.1 POLAR Damping Fluid (GABRIEL S.A.) . . . . . . . . . . . . . . . . . . 39
5.1.1 Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.1.1.1 Boundary conditions . . . . . . . . . . . . . . . . . . . . . 39
5.1.1.2 Solver Setup . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1.2 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 BASONETIC 2040 MR (BASF) . . . . . . . . . . . . . . . . . . . . . . . 44
5.2.1 Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.2.1.1 Fluid Model and Properties . . . . . . . . . . . . . . . . . 44
5.2.2 Solver Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.2.2.1 Determining the correct valve opening . . . . . . . . . . . 45
5.2.3 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Conclusions and Potential Future Work 48
6.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.2 Potential Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Bibliography 50
iii

List of Figures
1.1 Conceptual diagram for a generic telescopic damper [3] . . . . . . . . . . . 2
1.2 Computational geometry for the compression model, with its correspond-ing inlet, outlet and symmetry axis [7] . . . . . . . . . . . . . . . . . . . . 3
1.3 Computational geometry for the extension model, with its correspondinginlet, outlet and symmetry axis [7] . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Comparison between the CFD simulation and the experimental data fromthe manufactured MR damper with the optimal parameters, as shown byParlak [8]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Conceptual diagram for a generic telescopic damper [3] . . . . . . . . . . . 8
2.2 Illustration for the control volume and moving reference frame that willbe used during the simulations [3] . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Illustration for a generic MR damper [10]. . . . . . . . . . . . . . . . . . 16
2.4 Conceptual plot for the shear stress versus strain rate for a Herschel-Bulkley fluid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Illustration for the Hartmann flow. . . . . . . . . . . . . . . . . . . . . . 18
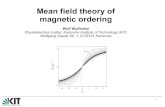
3.2 Theoretical velocity profiles for several Hartmann numbers with aluminumconducting walls (σw = 3.54∗10−7 S/m). . . . . . . . . . . . . . . . . . . 20
3.3 Illustration for the geometry and mesh used for the Hartmann flow sim-ulation (5000 elements). . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Simulated velocity profiles for the six different Hartmann numbers. . . . 23
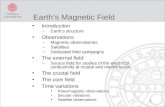
3.5 Simulated (FLUENT) velocity profiles versus theoretical predictions (MHD)for different Hartmann numbers. . . . . . . . . . . . . . . . . . . . . . . . 24
3.6 Axial velocity contour plot without any applied magnetic field (B=0 T,Ha=0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.7 Axial velocity contour plot with an applied magnetic field (B=20 T,Ha=31.8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.1 Labels for the model’s boundaries: velocity inlet, axis of symmetry (EJEDE SIMETRIA), tube’s walls (PARED DE TUBO), piston and pressureoutlet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Labels for the model’s boundaries in the valve section: valve top (TAPAVALVULA), valve opening (APERTURA) and valve (VALVULA). . . . . 28
4.3 Illustration of the valve opening for the compression model. This openingdepends on the pressure and inlet velocity. . . . . . . . . . . . . . . . . . . 29
4.4 Displacement of the valve opening (Deformacion) versus pressure on thevalve (Presion), for several iterations for the six inlet velocities. Thestructural result is the dark blue straight line. Plot is extracted fromOnate’s thesis [7]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
iv

4.5 Swirl produced immediately after the valve (Flow time t=0.1 s for vin =0.5 m/s). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.6 Swirl produced immediately after the valve (Flow time t=0.45 s for vin =0.5 m/s). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.7 Residuals for the transient simulation for vin = 0.5 m/s). . . . . . . . . . 32
4.8 The horizontal piston force monitor plotted against the flow time, for thetransient simulation with 371230 mesh elements and VIN = 0.65 m/s. . . 35
4.9 Mesh convergence for the horizontal force on the piston (vin = 0.50 m/s). 36
4.10 Mesh convergence for the horizontal force on the piston (vin = 0.65 m/s). 36
4.11 Mesh convergence for the horizontal force on the piston (vin = 0.89 m/s). 36
4.12 Comparison between the Fluent converged piston force and the experi-mental data provided by Gabriel S.A. and Onate [7]. . . . . . . . . . . . . 37
4.13 Percentage deviation between simulated data with ANSYS Fluent andexperimental data provided by Gabriel S.A. and Onate [7] for the pistonforce. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1 Contour plot for the applied magnetic field (B0y = 20 T ) . . . . . . . . . . 40
5.2 Line positions (Corte) to analyze the velocity profiles under the appliedmagnetic field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.3 Velocity profiles at the line positions (black 10 and red 11), as defined infigure 5.2, for VIN = 0.65 m/s and B0y = 20 T . . . . . . . . . . . . . . . 41
5.4 Transient simulations for the damping force with field and no field applied. 42
5.5 The damping force with no field applied and with a vertical magnetic fieldof B0y = 20 T . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.6 The percentage deviation of the simulated force when there is no fieldcompared to when a vertical magnetic field of 20 T is applied. . . . . . . . 43
5.7 Displacement of the valve opening (Deformacion de la valvula) versuspressure on the valve (Presion), for several iterations at vin = 0.65 m/s,for the fields applied. The structural result is the blue straight line. . . . . 45
5.8 Velocity vector plot for the valve section for B = 0.1 T. . . . . . . . . . . 47
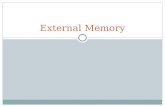
5.9 Damping force of the piston in terms of the magnetic field applied. . . . . 47
v

List of Tables
3.1 Properties of water used in the simulations . . . . . . . . . . . . . . . . . 22
3.2 Summary of the Chi-Square goodness of fit test for the 4 simulated Hart-mann numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1 Correct valve displacements given the fluid’s pressure at the valve for thesix inlet velocities to simulate. . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Properties of the POLAR damping fluid from Gabriel de ColombiaS.A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.1 Herschel-Bulkley parameters for the BASONETIC 2040 MR fluid [9] . . . 44
5.2 Correct valve displacements given the fluid’s pressure at the valve for themagnetic fields applied at vin = 0.65 m/s . . . . . . . . . . . . . . . . . . 46
vi

Abbreviations
CFD Computational Fluid Dynamics
MHD Magneto Hydro Dynamics
MRF Magneto Rheological Fluids
vii

Chapter 1
Introduction
Hydraulic dampers, also commonly known as shock absorbers, are essential components
in the modern automotive industry. Historically, dampers are created and developed
in response to the growing necessity to control unwanted vibrations in the cabins of
automobiles. Nowadays, this has translated into manufacturers seeking to provide the
greatest comfort for their clients. Any motion due to the unevenness of the road, any
sporadic pothole, and/or any manoeuvring perturbation is unwanted for the driver. This
is where shock absorbers play a key role. Shock absorbers seek to separate the effects of
on-road environments from the inside of the car.
Shock absorbers were implemented widely by the automotive industry at the beginning
of the 1920’s [3]. Nevertheless, the dampers used in that period were very different
from the ones we have today. The development and research of shock absorbers has
come hand in hand with the rise of the automotive industry. Nowadays, the most used
damper is the telescopic damper, and this will be our main object of focus throughout
this document.
1

Figure 1.1: Conceptual diagram for a generic telescopic damper [3]
There has been recent development on magnetorheological and electrorheological dampers.
These are dampers on which you apply magnetic and/or electrical fields to control the
damping force [3]. This advanced kind of shock absorbers has been implemented mainly
on luxurious and high-end car models, as well as some military vehicles. Nonetheless,
standard commercial cars seem to be oblivious to this technology. The following work
will reevaluate this statement by studying the effects of magnetic fields on commercial
dampers used every day on Colombian roads.
1.1 Previous work
Gabriel de Colombia S.A. is a Colombian company that manufactures dampers for
standard-level cars. On 2013, S. Onate developed a 2-dimensional axisymmetric model
of one of the commercial dampers manufactured by Gabriel de Colombia S.A., specifi-
cally for the MacPherson φ = 48 mm hydraulic damper [7]. This damper is used for
the shock-absorbing system on the front wheels of the Hyundai Atos automobile. The
authors developed two different models: one for the damper under compression and one
for the damper in extension. The main differences between the two models are the inlet
channel of the fluid and the corresponding geometry of the piston valve, as shown in
figures 1.2 and 1.3. This work did not include any thermal effects in the computational
model.
2

When compared to the experimental results for the damping force, the ANSYS Fluent
simulation obtained closer results for the compression model than the results for the
extension model. The differences for the compression models in terms of the damping
forces were in the order of 10%, while the extension model simulation obtained damping
forces that differed approximately by 25% from the ones obtained experimentally.
Figure 1.2: Computational geometry for the compression model, with its correspond-ing inlet, outlet and symmetry axis [7]
Figure 1.3: Computational geometry for the extension model, with its correspondinginlet, outlet and symmetry axis [7]
Based on these two models for the shock absorbers, other computational research projects
were carried out. For example, Leon unified the compression and extension models in or-
der to analyze the thermal performance of the damper [6]. This work was accomplished
3

by simulating several cycles of the damper, and monitoring the effect of the temperature
of the damping fluid with respect to the damping force done on the piston. After 10
cycles, which corresponds to approximately 5 seconds, the result of the simulation shows
that the temperature inside the damper rises by 5 K.
Additionally, to the previous thesis work, a 3-dimensional model of the damper was
developed by Urbano [12]. In this thesis work, the CFD model was combined with the
fluid-structure interaction to obtain the displacement of the valve. In the original model,
the displacement of the valve was obtained from a trial and error method, based on some
FEA (Finite Element Analysis) simulations. This model obtained better results for the
low velocity regime, but used much more computational resources.
The following work will seek to study the effect of magnetic fields applied externally to
the 2D axisymetric model of Onate’s damper. Nevertheless, we will limit our simulations
to the compression model under the conditions of intermediate velocities of inlet flow.
The proposed simulations will vary several parameters of the magnetic field and watch
the effects on the fluid flow and damping force.
1.1.1 MHD and MR Dampers (State of the Art)
MR (magnetorheological) fluids are controllable fluids based on magnetic micro-particles,
whose rheological properties can be changed by applying an external magnetic field. The
physics and models, used to describe this type of fluids, are discussed in Chapter 2. MR
fluids provide “simple, quiet, rapid-response interfaces between electronic controls and
mechanical systems” [4]. Given these characteristics, MR fluids have applications in
automotive devices (e.g. dampers, clutches, brakes), hydraulic systems and biomedical
mechanisms.
There has been recent development in the study of MR fluids through the use of CFD
simulations, which account for MHD (Magnetohydrodynamics) phenomena. MHD cou-
ples the flow equations with Maxwell’s equations for electromagnetism. For example,
4

Gedink [4] studied the two dimensional, steady, laminar flow of an incompressible MR
fluid between two fixed parallel plates in the presence of an external magnetic field. This
problem is known as the Hartmann flow. The CFD simulations for this study were done
with the help of ANSYS Fluent 14.0 and its Fluent MHD module. Gedink [4] pointed
out that increasing the magnitude of the external magnetic field will lead to a decrease
in the flow velocity. The project outlined in this document will also use ANSYS Fluent
to perform the MHD simulations.
With the help of CFD, work is also done on the applications of MR fluids. Specifically,
there has been a lot of work done on MR dampers, which can be categorized as a semi-
active controllable device. Hence, the interest in these systems. For example, Case [2]
performed simulations with COMSOL Multiphysics software on an axisymmetric model
of an MR damper, to be used for biomedical purposes. Case [2] studied the magnetic
flux lines, the field intensity, the fluid flow inside the damper and compared the damping
force to experimental data.
On the other hand, Parlak [8] created an optimization strategy based on CFD and elec-
tromagnetic analysis, in order to obtain the optimal design parameters of an MR damper.
The two objectives, the target damping force and maximum magnetic flux density, are
determined by optimizing the geometric parameters of the MR damper model. Parlak
validated the optimization strategy by manufacturing the optimal damper design and
comparing the experimental damping force with the CFD simulations. This validation
is shown on figure 1.4.
Figure 1.4: Comparison between the CFD simulation and the experimental data fromthe manufactured MR damper with the optimal parameters, as shown by Parlak [8].
5

1.2 Objectives
Main Objective
Study the effects of changing the parameters for an externally applied uniform magnetic
field with respect to the forces exerted by a damper.
Specific Objectives
• Validate the ANSYS Fluent MHD module by simulating the Hartmann flow.
• Using ANSYS Fluent, refine the mesh and solution for the original model produced
by Onate, only for the compression configuration.
• Simulate, with ANSYS Fluent and its MHD module, the magnetohydrodynamics
of the fluid inside the damper under the 2D model, only for the compression
configuration.
• Change the intensity of the applied magnetic field and study its effect on the flow
and the damping force.
• Compare the damping force for the damping fluid currently used in Gabriel S.A.
(POLAR), with a magnetorheological fluid proposed for shock absorbers (BASO-
NETIC 2040 manufactured by the BASF Company) for several intensities of the
magnetic field.
6

Chapter 2
Theoretical Framework
2.1 A Brief Overview of Dampers
There exists several types of dampers, which can be categorized depending on its func-
tioning mechanism. Nevertheless, the main focus of this work are the dampers classified
as telescopic dampers. These category of shock absorbers receive its name for its resem-
blance to ancient telescopes. Figure 2.1 shows the conceptual diagram for the acting
mechanism of telescopic dampers. There are four chambers, which depending if the
damper is undergoing compression or extension, will serve different functions. The air
chamber (chamber 0 according to figure 2.1), will act as a reservoir. This chamber is
usually filled with compressed air and will exert a constant load on the damping force.
The foot chamber (chamber 1) acts as the interface chamber between the damper and
the reservoir. This chamber will have a constant volume, but will act as a pressure
drainage. If the piston compresses the damper, the pressure in the foot chamber will
rise. In the extension case, the opposite case will happen, the pressure will drop. The
next compartment corresponds to the compression chamber (chamber 2). When the
damper is compressed, this chamber will reduce its volume, by exerting flow onto the
neighboring chambers. The last chamber, from left to right on figure 2.1, corresponds to
the extension chamber (chamber 3). When the piston’s configuration undergoes exten-
sion, this chamber will reduce its volume by allowing flow to the compression chamber.
7

The interface between each chamber will define the flow between each one of these. Ulti-
mately, the damping force will be determined by the flow between chambers depending
on the dynamic case. The flow between chambers 1 and 2 will be regulated by the exten-
sion or compression foot valves. In the same manner, the flow between chambers 2 and
3 will be regulated by the piston valves. It’s important to keep in mind that the piston
will be moving, as well its valves. While, the foot valves will be stationary with respect
to the damper reference frame. The piston valves regulate the flow by controlling the
flow passage’s breadth depending on the incoming pressure.
Figure 2.1: Conceptual diagram for a generic telescopic damper [3]
When working under compression, the piston will push the damping fluid from chamber
2 to chambers 1 and 3, whilst reducing the volume of the compression chamber and
increasing the volume of the extension chamber. Therefore, one can define the following
volumetric flow rates:
• QFC : Compression flow defined positive when the fluid goes from the compression
chamber to the foot chamber through the foot valves.
• QPC : Compression flow defined positive when the fluid goes from the compression
chamber to the extension chamber through the piston valves.
When working under extension, the piston will push the damping fluid from chamber
3 to chamber 2, and subsequently to chamber 1, whilst reducing the volume of the
8

extension chamber and increasing the volume of the compression chamber. As well as
in the compression case, one can define the following flow rates:
• QFE : Extension flow defined positive when the fluid goes from the foot chamber
to the compression chamber through the foot valves.
• QPE : Extension flow defined positive when the fluid goes from the extension
chamber to the compression chamber through the piston valves.
In general, the following statements hold:
QFC 6= QFE (2.1)
QPC 6= QPE (2.2)
Inequality 2.1 holds because the flow passages through the foot valves are different for
the extension and compression flows. Therefore the valves in some passages let the fluid
flow in one direction, while other passages in the opposite direction. Furthermore, it can
be stated that if QFC 6= 0, QFE does not necessarily equal zero. This statement holds
the other way around. There can exist abnormal effects immediately after reversing the
direction of flow, which allow the two flows to coexist.
The latter holds, in analogy, for the piston valves through inequality 2.2. The flows are
not necessarily equal, because through the piston valves there are passages that activate,
either under compression or extension flow. Analogous to the foot valves’ case, it can
be stated that if QPC 6= 0, QPE does not necessarily equal zero. Interchanging the flows
in the last statement, creates a statement that holds as well. This are abnormal effects
that occur shortly after changing between extension and compression.
With the last statements in mind, it is clear why Onate developed two different axisy-
metric models, one for compression and one for extension case. Nevertheless, working
with separate models implies that if there is flow in one direction, the opposite flow
9

will not exist. For the compression case on the piston valves, this translates into the
following logical statement:
QPC > 0 =⇒ QPE = 0 (2.3)
Equation 2.3, will be the starting supposition for this work. The following work will
focus solely on the compression case, with no residual extension flows. With this in
mind, the proposed simulations will start by varying the value of QPC . Nevertheless,
our reference frame will be fixed to the piston, which we suppose moves at a constant
velocity. Therefore, QPC will not be changed directly, but will be changed in accordance
to an arbitrary piston velocity (vp).
In order to perform a computational simulation, the fluid domain has to be defined.
The control volume for the fluid domain is depicted in figure 2.2. As stated before, our
reference frame is fixed on the piston, and will move along with it. Therefore, with this
non-inertial reference frame, the damping fluid will flow towards the piston, which will
look static. While if a static reference frame was to be chosen, the piston would move
through the fluid. If the control volume is chosen to move with the piston’s velocity,
there would be an inlet and outlet flow. The incoming fluid would enter the control
volume with a velocity vIN , which in turn is equal to the velocity of the piston on a
fixed reference frame (vIN = vp). And the outgoing fluid would move at a velocity vOUT .
Figure 2.2: Illustration for the control volume and moving reference frame that willbe used during the simulations [3]
10

2.2 Incompressible Flow
The following section seeks to state the general conservation equations of any incom-
pressible flow, in order to couple the with the electromagnetic theory. An incompressible
fluid is defined to have a constant density ρ within an infinitesimal volume dV moving
at a velocity ~U . Therefore, an incompressible fluid has the constrain that the material
derivative [13] of the density must be equal to zero. Therefore, this reads:
Dρ
Dt=∂ρ
∂t+ ~U · ∇ρ = 0 (2.4)
With this equation in mind, an incompressible fluid will have a constant density through-
out time and space (ρ(~r, t) = ρ0 = ρ).
2.2.1 Mass Conservation
Applying Reynold’s transport theorem to an infinitesimal control volume for the mass
quantity, the following continuity equation arises [13]:
∂ρ
∂t+ ~∇ · (ρ~U) = 0 (2.5)
Equation 2.5 states how mass is conserved for an arbitrary density function in a velocity
field, without any assumptions. If we take into account the incompressible fluid premise,
and combine equations 2.4 with equation 2.5, the following condition for the velocity
field arises:
~∇ · ~U = 0 (2.6)
2.2.2 Momentum Conservation
Applying Reynold’s theorem once again to an infinitesimal control volume, but this time
for the linear momentum, the following conservation equation arises:
11

ρD~U
Dt+∇p = ρ~g + ~∇ · τ + ~fi (2.7)
with D/Dt operating as the material derivative. Additionally, p corresponds to the pres-
sure field, τ is the viscous stress tensor, ~g is the vector denoting gravity, and ~fi denotes
any body force acting on the fluid.
Equation 2.7 can be simplified under certain assumptions. If it is assumed that the fluid
corresponds to a Newtonian fluid, and therefore holds certain special constitutive rela-
tionships, the viscous stress tensor may be simplified. Furthermore, if the incompressible
fluid assumption is introduced, equation 2.8 can be deduced [13].
ρD~U
Dt+∇p = ρ~g + µ~∇2~U + ~fi (2.8)
Equation 2.8 summarizes the three sets of equations known as the Navier-Stokes equa-
tions. These equations are highly non-linear, and few analytic solutions are known.
ANSYS Fluent, the CFD software used, solves simultaneously the set of equations that
arise from applying the discrete Navier-Stokes equation to each of the finite elements in
the mesh.
2.3 MHD (Magnetohydrodynamics)
MHD main achievement is coupling the Navier-Stokes equations with Maxwell’s electro-
magnetic equations. In the last section, the equations for the conservation of momentum
and mass were stated. Now, the electromagnetic theory has to be stated and coupled to
complete the MHD theory.
2.3.1 Maxwell’s Equations
James Clerk Maxwell formulated his classic electromagnetic theory on his famous pa-
per named “A Dynamical Theory of the Electromagnetic Field”, published on 1865.
12

Equations 2.9, 2.10, 2.11 and 2.12 correspond to Maxwell equations for low frequency
behaviours. This equations are generally known as “pre-Maxwell’s equations”, because
they were the first formulation of the electromagnetic theory. These equations drop the
electric field’s time derivative for Ampere’s law, which at first order doesn’t contribute
at the low-frequency regime [5]. Although this equations correspond to a first order
approximation, they are enough to create a well-posed MHD theory.
~∇ · ~B = 0 (2.9)
~∇× ~B = µ0~j (2.10)
~∇× ~E = −∂~B
∂t(2.11)
~∇ · ~E =Q
ε0(2.12)
In equations 2.9-2.12, ~B corresponds to the magnetic field. The quantity ~E corresponds
to the electric field, whilst the vector ~j corresponds to the current density vector. Ad-
ditionally, constants µ0 and ε0 correspond to the magnetic and electric permeability of
space, respectively.
Along with the latter equations, the electromagnetic theory is complete with the Lorentz
force. The Lorentz force sums up in one equation the electromagnetic force exerted on
a charged medium or particle. Equation 2.13 expresses mathematically the electromag-
netic body force, for which the electric field contribution will be neglected, once again.
~fL = ρ ~E +~j × ~B ≈ ~j × ~B (2.13)
13

2.3.2 Ohm’s Law
One of the most famous equation is physics may be Ohm’s law (V = IR) used in circuits.
Nevertheless, this form of Ohm’s law is neither the most general nor the most useful.
When studying a certain continuous material with an electrical conductivity σ, who
holds a certain velocity field ~U , while under the influence of electromagnetic field ( ~E
and ~B), the generalized Ohm’s law takes the form of equation 2.14.
~j = σ(~E + ~U × ~B
)(2.14)
2.3.3 MHD Equation
So how exactly does the the fluid flow theory and the electromagnetic theory couple?
The Lorentz body force, as stated in equation 2.13, is the key. The Lorentz body force
(equation 2.13) can be introduced explicitly into the Navier-Stokes’ equation, neglecting
the electric force. Additionally, the current density can be written in terms of ~B from
equation 2.10. The result of doing this is equation 2.15.
ρD~U
Dt+∇p = ρ~g + µ~∇2~U +
1
µ0(~∇× ~B)× ~B (2.15)
Equation 2.15 is known as the Navier-Stokes equation with the MHD source term. Nev-
ertheless, by introducing the magnetic field as another unknown, there must be another
equation to complete the set.
2.3.4 Induced Magnetic Field
As stated in the last section, there is one equation missing in order to get a closed set
of equations for MHD. There exists two methods of solving the system: one is through
the induced magnetic field method and the other one is through the electric potential
method. The first method will be explained, because this was the method used for the
the computer simulations through the MHD package in ANSYS Fluent.
14

The electric field can be written in terms of the current density vector (~j) and the
magnetic field ( ~B), according to Ohm’s law, as stated in equation 2.14. Once again,
the current vector density is written in terms of the magnetic field from equation 2.10.
Equation 2.16 is the result of doing this.
− ∂ ~B
∂t=
1
σµ0(~∇× ~∇× ~B)− ~∇× ~U × ~B (2.16)
Equation 2.16 can be simplified using some vector cross product properties, and employ-
ing explicitly equations 2.6 and 2.9. The result is equation 2.17.
∂ ~B
∂t+ (~U · ~∇) ~B =
1
σµ0∇2 ~B + ( ~B · ~∇)~U (2.17)
Equation 2.17 is known as the induced magnetic field equation. This equation shows
how a moving charged fluid with a certain velocity field will change the magnetic field
inside the material. Therefore, when an external magnetic field ( ~B0) is applied, the total
field ( ~B) can be decomposed into the applied magnetic field and the induced magnetic
field (~b), as stated in equation 2.18 [1].
~B = ~B0 +~b (2.18)
Equations 2.15, 2.17 and 2.18 are the complete set of equations that ANSYS Fluent
MHD package solves recursively on a meshed domain. The quantities to solve for are
~B, ~U , ~b and the pressure field p.
2.4 Magnetorheological Dampers
Magnetorheological dampers, also known as magnetic dampers, use the principles of
MHD and magnetorehological fluids in order to work. A MR fluid is a suspension of
ferromagnetic particles on a base liquid, usually a mineral oil. The apparent viscosity
of these fluids can be altered by applying magnetic fields, which in turn will vary the
15

damping forces.
Figure 2.3: Illustration for a generic MR damper [10].
Figure 2.3 illustrates the cross section for a generic MR damper and all its parts. These
dampers use an electric coil embedded in the piston valves which account for the ap-
plied magnetic field. The direction of the magnetic field will be perpendicular to the
flow direction for some sections of the valve channels, and parallel in other sections.
When the magnetic field is turned on, the magnetic particles in the MR fluid will align
restricting the flow of the fluid. Consequently, this will change the force exerted on the
piston valves’ walls, changing the damping force.
When an MR fluid is not under the action of any magnetic field, the fluid can be modeled
as a Newtonian fluid. However, when a magnetic field is applied, the MR fluid behaves
like a Herschel-Bulkley fluid. Figure 2.4 shows the shear stress versus strain rate plot
for a generic Herschel-Bulkley viscosity model.
16

Figure 2.4: Conceptual plot for the shear stress versus strain rate for a Herschel-Bulkley fluid.
The Herschel-Bulkley viscosity model plotted in figure 2.4 comes from the constitutive
relationship outlined in equation 2.19. Equation 2.19, is valid when the strain rate is
greater than a critical strain rate (γc). For strain rates less than γc, a linear Newtonian
model is used.
γ > γc : τ = τ0 + kγn (2.19)
For equation 2.19, τ corresponds to the shear stress in the fluid and τ0 to the yield
shear stress. Additionally, k is the consistency factor, while γ is the strain rate and n
corresponds to the power law index. We also have to define a critical strain rate (γc),
for which our model enters the non-linear regime as shown in figure 2.4. It is important
to note, that the parameters defined in equation 2.19 will all be function of the applied
magnetic field (B). Therefore, as the intensity of the magnetic field increases, we expect
the yield shear stress (τ0) to increase. Thus, the MR fluid becomes more viscous.
The MR fluid to analyze is the BASONETIC 2040, manufactured by the BASF Com-
pany. This MR fluid is recommended for the use in shock absorbers. Sapinsky and Horak
went on to obtain experimentally the Herschel-Bulkley model’s parameters for several
magnetic fields ranging from 0.1 to 0.5 T [9]. This properties will be shown in Chapter 5.
17

Chapter 3
The Hartmann Flow
The Hartmann flow is to MHD, analogous to what the Poiseuille flow is to incompress-
ible flow. The Hartmann flow works as a first introduction to MHD. This is why we
are going to use this configuration in order to validate the MHD package from ANSYS
Fluent. This and the fact the Hartmann flow has an analytic solution. Figure 3.1 shows
the general configuration of the Hartmann flow, with the z-axis coming out of the page.
Figure 3.1: Illustration for the Hartmann flow.
The Hartmann flow consists of a duct of infinite cross section where a fluid enters at an
average axial velocity of ~uin. All throughout the duct, a uniform magnetic field ( ~B0) is
applied in the y-direction. The duct has a length ` and width h.
18

The flow along the duct is determined by equations 2.15, 2.17 and 2.18. Therefore, as a
first step we can go ahead and solve the analytic model, and then simulate with ANSYS
Fluent. The whole purpose of this chapter is to validate our software and gain some
insight about the physical system.
3.1 Pre-processing
3.1.1 Mathematical Model
Equations 2.15, 2.17 and 2.18 are the starting point in order to obtain an analytic
expression for the velocity profile of the Hartmann flow. Therefore, let us write the
total magnetic field ( ~B) in terms of the external magnetic field ( ~B0), and the induced
magnetic field (~b), while defining right from the start the dimensionless numbers:
~B = x+RmHa
b(y, z)y Rm = µσhv0 Ha = hB0
√σ
µ(3.1)
It can be shown that at stationary conditions, the induced magnetic field (~b) will be
in the x-direction, and only depend on the y and z-coordinates. The Rm and Ha are
the Reynolds magnetic number and the Hartmann number. These are dimensionless
numbers that appear when the induced field is scaled [11]. We have to remember the
equation for the Reynolds number (Re = v0h/ν). Introducing equation 3.1 explicitly
into equation 2.18, reads:
∇2b+Ha∂u(y, z)
∂y= 0 (3.2)
Furthermore, we can introduce equation 3.1 explicitly into equation 2.15 and get a
momentum equation for the x-direction. Dividing this equation by Re, and rescaling
the velocity with v0 = h2
ρν
(dpdx
), the following equation can be derived [11]:
∇2u+Ha∂b
y= −1 (3.3)
19

In order to solve the system, we still have to write down the boundary equations for
the system. Doing this, implies supposing special properties of the walls, which have
a width tw. The first condition is the no-slip condition. The second condition incor-
porates the conductivity of the wall. Without going into much detail, it is known that
for insulating walls (σw = 0), there is no current density flowing through it. In order
to simplify nomenclature, the wall conductance ratio is defined (c = σwtwσh ). Therefore,
for insulating walls c = 0, and for perfectly conducting walls c → ∞. For more details,
on the mathematical definitions of the boundary conditions, see [11]. With the preced-
ing definitions and boundary equations in mind, equations 3.2 and 3.3 can be solved
simultaneously. The velocity profile in terms of the y-coordinate reads [11]:
u(y)
UMAX=
1
UMAX
[1
Ha
c+ 1
cHa+ tanhHa
] [1− coshHa y
coshHa
](3.4)
Figure 3.2 shows the plot of the velocity profile (equation 3.4) for several Hartmann
numbers. As the Hartmann number increases, the velocity profile tends to flatten in the
channel core.
Figure 3.2: Theoretical velocity profiles for several Hartmann numbers with aluminumconducting walls (σw = 3.54∗10−7 S/m).
20

3.2 Geometry and Mesh
The geometry used was a rectangular duct with width h = 1 m and length ` = 20 m, as
figure 3.3 shown. The fluid domain is the rectangle enclosed by the model’s geometry.
The mesh used consisted of 5000 rectangular elements, each one with the same size.
For the longitudinal direction, a number 50 elements where generated, while in the
perpendicular direction 100 elements were used.
Figure 3.3: Illustration for the geometry and mesh used for the Hartmann flow sim-ulation (5000 elements).
3.3 Solver Setup
3.3.1 Fluid properties
For the simulations, the fluid used was water. This water is supposed to have a relatively
high number of ions but still drinkable, which will in turn guarantee a not so low electrical
conductivity (σ). In comparison, ultra pure and distilled water will have an electrical
conductivity in the orders of 10−6 S/m. Table 3.1 summarizes the properties of water
provided to ANSYS Fluent for the simulation.
21

Table 3.1: Properties of water used in the simulations
Property Value
Density ρ 998 kg/m3
Viscosity µ 0.001 Pa.s
Conductivity σ 0.01 S/m
Magnetic Permeability µ0 1.2567∗10−6 H/m
3.3.2 Boundary conditions
The boundary conditions imposed on the simulations were:
• Velocity inlet: vin = 0.001 m/s (Laminar Reynolds) (No electric current)
• Walls: No slip and insulating walls
• Pressure outlet: At atmospheric pressure (No electric current)
3.3.3 Solution methods
The solution methods used, according to the options given by ANSYS Fluent, were:
• Pressure-Velocity Coupling: SIMPLE
• Spatial Discretization Gradient: Least Squares Cell Based
• Pressure: Second Order
• Momentum: Second Order Upwind
• B-field: Second Order Upwind
Several simulations were made, varying the intensity of the magnetic field, thus varying
the Hartmann number. The simulations were made for B = [0, 2, 5, 10, 20] T . The
corresponding set of Hartmann numbers, according to the properties stated in 3.1 and
the geometry, are Ha = [0, 3.16, 7.91, 15.8, 31.6].
22

3.4 Post-processing
Figure 3.4, shows the plot of the developed velocity profile for the five Hartmann numbers
simulated. It is clear the effect of the magnetic field on the flow. The velocity profile
flattens at the center of channel, while the maximum velocity decreases. This is exactly
what the theory predicted.
Figure 3.4: Simulated velocity profiles for the six different Hartmann numbers.
Furthermore, we can go ahead and compare the theory with the simulation data explic-
itly. This is what figure 3.5 shows. Table 3.2 shows the summary for the Chi-Square test
done, in order to test how well the theory correlates with the simulations. A p-value close
to 1, indicates that the simulated data agrees with the theory. The coincidence between
MHD analytic results and the simulations done is almost perfect. Needless to say, the
internal functioning of the add-on MHD package is supposed to be based on MHD theory.
Table 3.2: Summary of the Chi-Square goodness of fit test for the 4 simulated Hart-mann numbers
Hartmann number χ2 Statistic P-value
0 0.03422 1.0
3.16 2.00749 1.0
15.8 7.38810 1.0
31.6 15.48187 1.0
23

Figure 3.5: Simulated (FLUENT) velocity profiles versus theoretical predictions(MHD) for different Hartmann numbers.
Figures 3.6 and 3.7 show the contour plot for the y-component of the velocity at x = 5
m. It can be seen the flow is already fully developed when there is no external magnetic
field. Nevertheless, when we apply a field of 20 T, the transition region for the flow
extends longer. This is an additional effect of the magnetic field.
Figure 3.6: Axial velocity contour plot without any applied magnetic field (B=0 T,Ha=0)
24

Figure 3.7: Axial velocity contour plot with an applied magnetic field (B=20 T,Ha=31.8)
The MHD package provided in ANSYS Fluent and its internal black box reproduces
accurately the results predicted by MHD theory.
25

Chapter 4
Damper Without Applied
Magnetic Fields
The following chapters will use the damper model geometry developed by Onate [7],
as the start point for simulations. This model doesn’t couple the fluid with the valve
structure. Therefore, an additional step has to be done in order to determine the valve
opening. There won’t be much detail as to how the 2D axisymmetric model was derived
(for details on this see [7]). We will work under the premise, that the 2D axisym-
metric approximation will represent fairly well what happens in the complete 3D model.
Additionally, the 2D axisymmetric model reduces computational time, compared to sim-
ulating the complete 3D model.
4.1 Geometry
According to figure 2.1, a telescopic damper should have three main chambers: the foot
chamber, the compression chamber and the extension chamber. Onate’s models (com-
pression and extension models) only focus on the flow from the compression chamber
to the extension chamber, or viceversa. As stated before, this work only focuses on
the compression model. Therefore, for the compression case, the flow will be from the
compression to the extension chamber. The model (figures 4.1 and 4.2) works under
the physical premise portrayed in figure 2.2. The frame of reference will be fixed to the
26

moving piston. Therefore the piston will look as if it were static, while there is a flow
coming from the compression chamber. The control volume is defined such that the
velocity inlet is on the compression chamber and the pressure outlet is at the extension
chamber. This flow has to go through the piston valves, obligatorily. Therefore, the
piston bears the force of the fluid flowing through it. This piston force will be our main
variable of interest.
The compression model, portrayed in figures 4.1 is an approximate representation of the
3D damper. Therefore, all the main components can be pointed out in our model. The
first component is the tube’s wall of the damper. This is the component highlighted in
red on figure 4.1. The tube’s wall is part of the main and static structure of the damper.
The boundary highlighted in yellow corresponds to the symmetry axis in our model.
The boundary between the piston and the fluid is highlighted in green.
Zooming in into the valve section (see figure 4.2), the boundaries between the solid com-
ponents of the valve and the fluid can be outlined. The boundary highlighted in blue, on
figure 4.2, corresponds to the valve top. This is the first part of the piston that comes
into interaction with the fluid. The one highlighted in orange corresponds to the equiv-
alent of the valve opening. This valve opening will change according to pressure exerted
on it. The calculation of the valve opening will be explained in the following section. The
last component corresponds to the valve’s main body, and is highlighted in yellow. This
component is the last section of the piston before the flow reaches the extension chamber.
The variable of interest is the damping force exerted on the piston and all of its com-
ponents, including the valve, the valve opening and the valve top. The damping force
corresponds to the force exerted by the fluid onto the totality of the piston’s components.
Therefore, in order to calculate this force, we will use the force monitor tool provided by
ANSYS Fluent, to monitor the sum of the forces exerted on the piston, the valve top,
the valve opening and the valve’s body, in the x-direction.
27

Figure 4.1: Labels for the model’s boundaries: velocity inlet, axis of symmetry (EJEDE SIMETRIA), tube’s walls (PARED DE TUBO), piston and pressure outlet.
Figure 4.2: Labels for the model’s boundaries in the valve section: valve top (TAPAVALVULA), valve opening (APERTURA) and valve (VALVULA).
28

4.2 Pre-processing
4.2.1 Determining the correct valve opening
As stated in the previous section, determining the length of the valve opening is highly
non-trivial. The length of the valve opening is depicted on figure 4.3. The first thing to
point out, is that this model doesn’t take into consideration any interaction between the
fluid and the structure. Whilst the mechanism of the valve depends explicitly on the
deformation caused by the fluid interaction. Nevertheless, Onate and professor Lopez
solved this problem by proposing an iterative method between the fluid simulation and
the valve’s structural simulation [7]. They proposed iterating between the two sepa-
rate simulations until convergence was met. Nevertheless, this method doesn’t take
into account the friction between the metal parts of the valve, and just assumes elastic
deformation for the valve. The valve structural simulation corresponds to the straight
blue line in figure 4.4, and was done by applying different pressures on the valve. The
intersecting curved lines correspond to the iterations done with the Fluent simulations.
For each Fluent simulation at a certain valve displacement, the pressure at the valve
can be monitored. The main goal is to find the correct valve opening displacement for
each inlet velocity. This point corresponds to the intersection between the curved lines
(Fluent) and the straight line (Structural).
Figure 4.3: Illustration of the valve opening for the compression model. This openingdepends on the pressure and inlet velocity.
29

Figure 4.4: Displacement of the valve opening (Deformacion) versus pressure on thevalve (Presion), for several iterations for the six inlet velocities. The structural result
is the dark blue straight line. Plot is extracted from Onate’s thesis [7].
With Onate’s data from figure 4.4, the intersection points were calculated. The correct
valve displacements to use in the simulations are stated .
Table 4.1: Correct valve displacements given the fluid’s pressure at the valve for thesix inlet velocities to simulate.
INTERSECTION POINT
vin (m/s) Valve pressure (Pa) Valve displacement (m)
0.30 497317 1.453∗10−4
0.50 676661 1.977∗10−4
0.64 787951 2.302∗10−4
0.89 1021810 2.986∗10−4
0.98 1134010 3.314∗10−4
1.18 1307660 3.821∗10−4
30

4.2.2 Transient or stationary?
At first, and following Onate’s method, a stationary scheme for our problem was pro-
posed. Nevertheless, the residual monitors were not as expected. The continuity resid-
uals were very high (∼ 101) relative to the size and refinement of our meshes, and the
force monitor oscillated significantly.
After performing several transient simulations, the phenomenon that caused the high
residuals for the stationary case, was found. At this velocities, a swirl right after the
valve occurs. The swirl at different times is depicted on figures 4.5 and 4.6. For the
transient simulations, there were no problems with the residuals, as shown in figure 4.7.
Figure 4.5: Swirl produced immediately after the valve (Flow time t=0.1 s for vin =0.5 m/s).
31

Figure 4.6: Swirl produced immediately after the valve (Flow time t=0.45 s forvin = 0.5 m/s).
Figure 4.7: Residuals for the transient simulation for vin = 0.5 m/s).
32

4.3 Solver Setup
4.3.1 Fluid properties
Table 4.2 shows the properties for the POLAR damping fluid from the Gabriel de
Colombia S.A. company, as measured by Onate [7]. The electrical conductivity was
taken to be the same as pure water. Damping oils usually don’t have any ions and are
used as insulating materials, hence the low conductivity.
Table 4.2: Properties of the POLAR damping fluid from Gabriel de ColombiaS.A.
Property Value
Density ρ 872.544 kg/m3
Viscosity µ 0.02327 Pa.s
Conductivity σ 0.001 S/m
Magnetic Permeability µ0 1.2567∗10−6 H/m
Initially, the plan was to obtain a sample of the POLAR damping fluid from Gabriel
de Colombia S.A. and perform the corresponding tests, in order to measure the elec-
trical conductivity and the magnetic permeability. Nevertheless, there were some legal
problems which were not solved in time. Therefore, the sample was never retrieved.
4.3.2 Boundary conditions
The boundary conditions imposed, according to the options given by ANSYS Fluent,
were:
• Velocity inlet: vin = [0.30, 0.50, 0.64, 0.89, 0.98, 1.18] m/s (Laminar)
• Tube’s Walls: No slip and static
• Piston: No slip and static
• Valve top: No slip and static
• Valve opening: No slip and static
33

• Valve: No slip and static
• Axis of symmetry: Axis
• Pressure outlet: At gauge pressure p = 0
4.3.3 Solution methods
The solution methods used, according to the options given by ANSYS Fluent, were:
• Pressure-Velocity Coupling: SIMPLE
• Spatial Discretization Gradient: Least Squares Cell Based
• Pressure: Second Order
• Momentum: Second Order Upwind
The simulations were done under a time-transient scheme, with 40 iterations per time
step.
4.4 Mesh Validation
With the latter in mind, there were a total of 36 transient simulations, 6 mesh refine-
ments for each inlet velocity. One simulation consisted of time-dependent data of the
force monitor on the piston, such as the data plotted at figure 4.8. With the results of
this force as a function of flow time, the protocol was to wait until this monitor con-
verged. Nevertheless, in some simulations the monitor kept oscillating. In this cases,
a mean value per oscillation was calculated. The converged forces were then compiled
and plotted against the number of mesh elements used in the simulations. Figures 4.9,
4.10 and 4.11 show this procedure for three different inlet velocities.
34

Figure 4.8: The horizontal piston force monitor plotted against the flow time, for thetransient simulation with 371230 mesh elements and VIN = 0.65 m/s.
The mesh validation consisted of refining the mesh enough, until the values of the force
exerted on the piston in the x-direction converged and became independent of the mesh
sizing. In order, to find the value to which the monitors converged an exponential fit
was done on the data. The exponential fit was of the form:
y = A exp (−Bx) + C (4.1)
In this case, the independent variable x corresponds to the number of elements in the
mesh. Whilst, the dependent variable y corresponds to force exerted on the piston by
the fluid on the x-direction (Fx−PISTON ). The C parameter of the exponential fit was
taken to be the force to which the simulation converged. Therefore, for figures 4.9,
4.10 and 4.11, the straight discontinuous lime-green line corresponds to the converged
force for that particular velocity. Therefore, Ffit = C. The values of the force plotted
on figures 4.12 labeled FLUENT, correspond to the different values of this fitted force
(Ffit) for each velocity.
35

Figure 4.9: Mesh convergence for the horizontal force on the piston (vin = 0.50 m/s).
Figure 4.10: Mesh convergence for the horizontal force on the piston (vin = 0.65m/s).
Figure 4.11: Mesh convergence for the horizontal force on the piston (vin = 0.89m/s).
36

4.5 Post-processing
After the mesh validation, the piston forces were obtained and compared to the experi-
mental data, as plotted in figures 4.12 and 4.13. The percentage error for the simulations
is defined the following way:
ε =| FFLUENT − FEXP |
FEXP(4.2)
Figure 4.12: Comparison between the Fluent converged piston force and the experi-mental data provided by Gabriel S.A. and Onate [7].
Figure 4.13: Percentage deviation between simulated data with ANSYS Fluent andexperimental data provided by Gabriel S.A. and Onate [7] for the piston force.
37

As highlighted on figures 4.12 and 4.13, there exists an intermediate region for the inlet
velocity where the percentage error of the simulations is below 5%. This is a very impor-
tant result because it shows and limits the validity of the 2D axissymetric model used
in this work. This intermediate region for the inlet velocity goes from approximately
0.5 m/s to 0.9 m/s. In this region, the compression model used will reproduce loy-
ally how the damping force behaves in the MacPherson φ = 48 mm hydraulic damper
manufactured by Gabriel de Colombia S.A. and used on the Hyundai Atos automobile.
This chapter has proven the validity of the 2D compression axissymetric model for a
damper under certain velocity inlet conditions. The following chapter will explore what
happens when a magnetic field is applied to the damper under these conditions. There-
fore the inlet velocities to analyze in the following chapter are 0.50, 0.64 and 0.89 m/s.
For these velocities, we are sure the compression model is valid.
38

Chapter 5
Damper With Applied Magnetic
Fields
The following chapter explores what happens to the damping force when a magnetic field
is applied to the damper. Two fluids are compared under the application of a magnetic
field: the conventional POLAR damping fluid (Gabriel S.A.) and the commercial MR
fluid BASONETIC 2040, developed by the BASF Company. This last one is recom-
mended for use in shock absorbers [9].
5.1 POLAR Damping Fluid (GABRIEL S.A.)
The fluid properties for the POLAR damping fluid are the same as the ones used in
chapter 4. Table 4.2 summarizes these properties.
5.1.1 Pre-processing
5.1.1.1 Boundary conditions
The boundary conditions imposed on the simulations, according to the options given by
ANSYS Fluent and its MHD package, were:
• Velocity inlet: vin = [0.50, 0.64, 0.89] m/s (Laminar Reynolds)
39

• Tube’s Walls: No slip, static and insulating
• Piston: No slip, static and insulating
• Valve top: No slip, static and insulating
• Valve opening: No slip, static and insulating
• Valve: No slip, static and insulating
• Axis of symmetry: Axis
• Pressure outlet: At gauge pressure p = 0
5.1.1.2 Solver Setup
The solution methods used, according to the options given by ANSYS Fluent, were:
• Pressure-Velocity Coupling: SIMPLE
• Spatial Discretization Gradient: Least Squares Cell Based
• Pressure: Second Order
• Momentum: Second Order Upwind
• B-field: Second Order Upwind
The simulations were done under a time-transient scheme, with 40 iterations per time
step. A magnetic field of ~B0 = 20 T y was applied all throughout the fluid domain.
Figure 5.1: Contour plot for the applied magnetic field (B0y = 20 T )
40

5.1.2 Post-processing
In order to analyze the effect of the magnetic field all throughout the domain, some
line monitors on the axial velocity were drawn (figure 5.2). At these positions, it was
expected to see a velocity profile similar to the Hartmann flow velocity profile, outlined
in the chapter 3. Figure 5.3 shows the velocity profiles at these line positions. From
this plot, it is clear that the profile tends to flatten at the center of the channel, without
reproducing the parabolic profile for if there were no field. Therefore, the results were
as expected.
Figure 5.2: Line positions (Corte) to analyze the velocity profiles under the appliedmagnetic field
Figure 5.3: Velocity profiles at the line positions (black 10 and red 11), as defined infigure 5.2, for VIN = 0.65 m/s and B0y = 20 T
41

Nevertheless, as stated before, it is expected that the damping force would not change
when a magnetic field is applied to this fluid. This fluid doesn’t have any magnetorheo-
logical properties, and is a dipolar fluid. With fluids such as this one, the Lorentz force
is the only acting force. According to equation 2.13, the force exerted by the magnetic
field will always be perpendicular to the flow. Therefore, the magnetic field will do no
work on the fluid. Thus, we expect the damping force in the x-direction to not change
significantly.
A magnetic field of 20 T is very big compared, for example, with the magnetic field of the
earth, which is in the order of µT . The biggest magnetic fields produced here on earth
are in the order of 10 ∼ 20 T , and have been achieved just for mere seconds. The field
applied here was an intended exageration just to show that the damping force doesn’t
change for this fluid. Figure 5.4, shows the transient simulation for an inlet velocity of
0.5 m/s. As it can be noted, the damping force changes by less than one percent. This
change can be attributed to numerical error propagation.
Figure 5.4: Transient simulations for the damping force with field and no field applied.
42

The transient simulations were done for the other three velocities, in order to test our
hypothesis. Figures 5.5 and 5.6 are no surprise. The damping force doesn’t change
significantly for any inlet velocity. The percentage deviations shown in figure 5.6 are no
greater than 1.5%, and they can all be attributed to numerical error propagation. So
what happens when a magnetorheological fluid is used?
Figure 5.5: The damping force with no field applied and with a vertical magneticfield of B0y = 20 T .
Figure 5.6: The percentage deviation of the simulated force when there is no fieldcompared to when a vertical magnetic field of 20 T is applied.
43

5.2 BASONETIC 2040 MR (BASF)
The BASONETIC 2040 is a MR fluid, developed by the BASF Company, and is rec-
ommended for use in shock absorbers or dampers. The following section will explore
what happens when this fluid is introduced to the compression model of the damper,
and a magnetic field is applied.
5.2.1 Pre-processing
5.2.1.1 Fluid Model and Properties
As stated in Chapter 2, an MR fluid consists of magnetic nano-particles introduced
in an oil suspension. When a magnetic field is applied, the nano-particles align with
the magnetic field. Thus, changing the viscosity of the fluid. Therefore, for higher
magnetic fields applied, the viscosity, or consistency factor in this case, will increase
The MR fluids’ viscosity can be modelled through the Herschel-Bulkley viscosity model
(see equation 2.19). The Herschel-Bulkley parameters for the BASONETIC 2040 fluid
are summarized in table 5.1. The BASONETIC 2040 has a density of ρ = 2470 kg/m3
[9].
Table 5.1: Herschel-Bulkley parameters for the BASONETIC 2040 MR fluid [9]
Magnetic Field
B (T)
Yield stress
τ0 (Pa)
Consistency Factor
k (Pa·s)
Power law
index
Critical Strain Rate
γc (1/s)
0 6.45 4.7 0.61 5
0.1 900 112 0.50 15
0.2 3200 115 0.55 30
0.3 5800 110 0.61 30
0.4 9600 95 0.70 30
0.5 12500 103 0.69 30
44

5.2.2 Solver Setup
The solver setup was used under a stationary scheme for time, different from what
was done in previous chapters. The viscosity for this fluid is much higher than for the
previous fluid, therefore as we will see, there was no swirl that affected the stationary
residuals. The spatial discretization was the same ones as used in the preceding chap-
ters. An axissymmetrical scheme was chosen, as in the previous simulations. In this
case, just one inlet velocity was analyzed, vin = 0.65 m/s. The external fields applied
in the y-direction were B0y = [0, 0.1, 0.2, 0.3, 0.4, 0.5] T. Sapinsky’s data ranges just for
these magnetic fields. Nevertheless, they are enough. At B = 0.5 T, this MR fluid
becomes very stiff, almost like a plastic. The viscosity model used in ANSYS Fluent
was the Herschel-Bulkley model.
5.2.2.1 Determining the correct valve opening
To determine the correct valve opening for the model, the iteration method portrayed
in Chapter 4 has to be used again. Figure 5.7 shows the process.
Figure 5.7: Displacement of the valve opening (Deformacion de la valvula) versuspressure on the valve (Presion), for several iterations at vin = 0.65 m/s, for the fields
applied. The structural result is the blue straight line.
45

Using the same iterative method, mentioned in Chapter 4, the intersection points for
the structural data and the simulated FLUENT data were calculated (table 5.2). This
table is analogous to table 4.1. With these correct valve displacements, the geometry of
the model is portraying correctly what happens at the valve.
Table 5.2: Correct valve displacements given the fluid’s pressure at the valve for themagnetic fields applied at vin = 0.65 m/s
INTERSECTION POINT (vin = 0.65 m/s)
B0 (T) Valve Pressure (Pa) Valve displacement (m)
0 1000965 3.071∗10−4
0.1 1084510 3.174∗10−4
0.2 1305942 3.856∗10−4
0.3 1706894 4.968∗10−4
0.4 2405064 7.024∗10−4
0.5 - -
When a magnetic field of B = 0.5 T, the valve displacement is too big. When the
pressure exerted on the valve is over 5∗106 Pa, there can no be assurance that the valve
behaves linearly. Therefore, table 5.2 doesn’t report this intersection point.
5.2.3 Post-processing
Overall, the damping force exerted by the piston is the variable of interest. Nevertheless,
one important thing to note, is that when the field is turned on, the swirl (as shown
in figures 4.5 and 4.6) disappears. The velocity vector plot, for B = 0.1 T, is shown
on figure 5.8. When a magnetic field is applied to the BASONETIC 2040 inside the
damper, the MR fluid becomes stiff enough for the swirl to disappear. As discussed
with professor Lopez, this is an important fact because with no swirl, the heat loss and
friction inside the damper will decrease.
46

Figure 5.8: Velocity vector plot for the valve section for B = 0.1 T.
In what concerns the damping force exerted by the piston, figure 5.9 shows the damping
force in terms of the magnetic field applied in the vertical direction. When there is no
field (B = 0 T), the damping force with the BASONETIC 2040 (F2040 = 1242 N) is
approximately twice the damping force with the POLAR fluid at vin = 0.65 m/s (com-
pare with FPOLAR = 522 N). Additionally, the damping force increases as the magnetic
field increases. This response is due to the effect that the magnetic field has on the
viscosity of the MR fluid used. Nevertheless, at B = 0.4 T, the damping force seems
to saturate. The damper become so stiff, that it will just transmit force, and behave
like plastic. With the latter in mind, a protocol could be developed in order to con-
trol the damping force of the piston with magnetic fields, if the BASONETIC 2040 MR
fluid were to be used. These results could be corroborated with some experimental effort.
Figure 5.9: Damping force of the piston in terms of the magnetic field applied.
47

Chapter 6
Conclusions and Potential Future
Work
6.1 Conclusions
• The Hartmann flow works as a validation exercise for any CFD software that
wishes to couple magnetic fields and fluid flow. The analytic solutions for this
problem solved by MHD should fit the simulated data.
• The model, developed by Onate [7] and used during this work, reproduces loyally
(ε < 5%) the experimental data of the damping force, only for a certain interval
of the inlet velocity. Therefore, if the purpose is to reproduce the damping force
within a 5% error, this compression model has to be used, for inlet velocities within
0.5 and 0.9 m/s.
• With the current fluid used in Gabriel S.A. for its dampers, the POLAR damp-
ing fluid, magnetic fields applied would have no influence on the damping force.
This fluid doesn’t have any magnetorheological properties that respond to external
magnetic fields. If one wishes to control the damping force with external, this fluid
should not be used.
• Instead one should use the BASONETIC 2040 MR fluid, to control the damping
force with magnetic fields. Right from the start, the BASONETIC 2040, without
any magnetic force, duplicates the damping force. As we increase the magnetic
48

field, the damping force will increase as well. Therefore, controlling the damping
force with an external magnetic field is viable, if the BASONETIC 2040 is used.
• The swirl that was shown for the POLAR fluid, right after the valve, doesn’t form
when we apply a magnetic field of B = 0.1 T to the BASONETIC 2040. The
fact that this swirl doesn’t appear will reduce the heat loss and friction inside the
damper.
6.2 Potential Future Work
The obvious step to follow after this simulations is to lay out some experimental valida-
tion. Therefore, the proposed future work would be to obtain a sample of BASONETIC
2040 (BASF Company) and run rheological tests, in order to obtain the Herschel-
Bulkley parameters of this MR fluid. Just as it was done by Sapinsky and Horak [9].
With a sample of BASONETIC 2040, the next step would be to fill the damper used
experimentally in Onate’s thesis, and do the corresponding tests without any magnetic
field. The next step would be to build the experimental setup in order to apply the
magnetic field. This field can be applied to the whole damper or just to the valve sec-
tion, by adding a coil to piston valve section. The whole purpose of this work would be
to analyze the change in the damping force, by implementing the BASONETIC 2040
MR fluid in this damper. Another future work proposed is to simulate the damper with
the BASONETIC 2040 but just applying the magnetic fields at the valve section. This
would allow for a finer control of the magnetic force.
49

Bibliography
[1] ANSYS, I. (2013). ANSYS Fluent Magnetohydrodynamics (MHD) Module Manual.
ANSYS, Inc., 275 Technology Drive Canonsburg, PA 15317.
[2] Case, D., Taheri, B., and Richer, E. (2014). Dynamical modeling and experimental
study of a small-scale magnetorheological damper. IEEE/ASME Transactions on
Mechatronics, 19(3):1015–1024.
[3] Dixon, J. C. (2008). The shock absorber handbook. J. Wiley and Sons.
[4] Gedik, E., Kurt, H., Recebli, Z., and Balan, C. (2012). Two-dimensional cfd simu-
lation of magnetorheological fluid between two fixed parallel plates applied external
magnetic field. Computers & Fluids, 63:128 – 134.
[5] Hosking, R. J. and Dewar, R. L. (2016). Fundamental fluid mechanics and magne-
tohydrodynamics. Springer.
[6] Leon Quiroga, J. A., Lopez Mejıa, O. D., Suarez, L. C., and Porras Rey, G. O.
(2014). Analisis termico de un amortiguador por medio de cfd. Tesis de pregrado.
[7] Onate Alba, S. G., Lopez Mejıa, O. D., and Gomez, S. (2013). Modelo computacional
axisimetrico de la dinamica del flujo interno de un amortiguador. Tesis de pregrado.
[8] Parlak, Z., Engin, T., and Ismail Callı (2012). Optimal design of mr damper via
finite element analyses of fluid dynamic and magnetic field. Mechatronics, 22(6):890
– 903. Special Issue on Intelligent Mechatronics (LSMS2010 & ICSEE2010).
[9] Sapinski, B. and Horak, W. (2013). Rheological properties of mr fluids recommended
for use in shock absorbers. Acta Mechanica et Automatica, 7(2).
[10] Shinde, A. (2011). Magnetic suspension system.
https://cecas.clemson.edu/cvel/auto/AuE835 Projects 2011/Shinde project.html.
50

[11] Ulrich, M. and Leo, B. (2010). Magnetofluiddynamics in Channels and containers.
Springer.
[12] Urbano Caguasango, J. M. and Lopez Mejıa, O. D. (2014). Numerical study of the
fluid flow through automotive shock-absorber shims. Tesis de pregrado.
[13] White, F. M. (2011). Fluid mechanics. McGraw Hill, 7th edition.
51