Sensor Integration for Inflight Icing Characterization...
10
c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization. MMSMM MM^ ______^_^__ A01-16414 _ AIAA 2001-0542 SENSOR INTEGRATION FOR INFLIGHT ICING CHARACTERIZATION USING NEURAL NETWORKS James W. Melody, Devesh Pokhariyal, Jason Merret, Tamer Basar, William R. Perkins, Michael B. Bragg, University of Illinois, Urbana, IL 39th AIAA Aerospace Sciences Meeting and Exhibit January 8-11, 2001 Reno, Nevada For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 1801 Alexander Bell Drive, Suite 500, Reston, VA20191-4344
Transcript of Sensor Integration for Inflight Icing Characterization...

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
MMSMM MM^ ______^_^__ A01-16414 _
AIAA 2001-0542SENSOR INTEGRATION FORINFLIGHT ICINGCHARACTERIZATION USINGNEURAL NETWORKSJames W. Melody, Devesh Pokhariyal, Jason Merret,Tamer Basar, William R. Perkins, Michael B. Bragg,University of Illinois,Urbana, IL
39th AIAA Aerospace Sciences Meeting and ExhibitJanuary 8-11, 2001
Reno, NevadaFor permission to copy or republish, contact the American Institute of Aeronautics and Astronautics1801 Alexander Bell Drive, Suite 500, Reston, VA 20191-4344

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
AIAA 2001-0542
SENSOR INTEGRATION FOR INFLIGHTICING CHARACTERIZATION USING
NEURAL NETWORKSJames W. Melody* Devesh PokhariyalJ Jason MerretfTamer Ba§arf William R. Perkinsf Michael B. Braggf
University of Illinois,Urbana, IL
This work advances a neural network that characterizes aircraft ice accretion inorder to improve flight performance and safety. Neural networks have been developedpreviously for use within an ice management system that monitors inflight aircraft icingand its effects upon performance, stability, and control. The previous work has appliedthese networks to stability and control derivative estimates provided by an H°° parameteridentification algorithm during a longitudinal maneuver. This paper extends those resultsby addressing ice characterization in the absence of pilot input when poor excitation ofthe flight dynamics limits the accuracy of parameter estimates. To compensate for thisshortcoming inherent to steady-level flight scenarios, the neural network presented in thispaper integrates steady-state characterization and hinge moment sensing with parameterestimates. The neural network provides icing characterization in terms of an estimateof the previously developed icing severity factor, rj. Extensive simulation results arepresented that indicate the accuracy of neural network characterization during steady-level flight in the presence of sensor noise and turbulence over a broad range of flight trimconditions and turbulence levels. Furthermore, the relative utility of each informationsource is investigated via consideration of network accuracy of networks trained only onthat information source.
INTRODUCTIONCurrent aviation research and development has be-
gun to focus more upon creating aircraft that are safeand reliable during severe weather conditions. Aircrafticing is a large area of concern due to the detrimentaleffects of accumulated ice upon aerodynamic perfor-mance. Small amounts of ice can have an extremeimpact upon aircraft dynamics and consequently, ic-ing has been one of the most visible causes of severeaccidents. Icing was determined to be a factor in803 aircraft accidents that occurred between 1975 and1988.l Nearly half of these accidents resulted in fa-talities. Commercial accidents such as the AmericanEagle ATR-72 crash near Roselawn, Indiana, whichkilled 68 people in October 1994, have also led to na-tional recognition of icing problems.2 In response tothe abundance of aircraft icing accidents, NASA and
* Graduate Research Assistant, Department of Electrical andComputer Engineering and the Coordinated Science Laboratory,Member AIAA.
t Graduate Research Assistant, Department of Aeronauticaland Astronautical Engineering, Member AIAA.
* Professor, Department of Electrical and Computer Engi-neering and the Coordinated Science Laboratory.
§ Professor and Head, Department of Aeronautical and As-tronautical Engineering, Associate Fellow, AIAA.
Copyright © 2001 by Coordinated Science Laboratory, Univer-sity of Illinois. Published by the American Institute of Aeronauticsand Astronautics, Inc. with permission.
the President's Commission on Aviation Safety and Se-curity have developed an aviation safety research planthat places a high national priority upon icing protec-tion and prevention.3
Most icing-related accidents occur because ice ac-cretion affects the performance and stability of anaircraft by altering the shape of its aerodynamic sur-faces. Other icing incidents include engine failure andpropeller ice, but this work will focus only on the ef-fects of airframe icing. Currently, there are two mainapproaches that deal with the dangers of ice accretion.First, pilots are given complete weather informationbefore and during flights in order to avoid potentialicing conditions. Second, aircraft are thoroughly de-iced before take-off and then operate an ice protectionsystem (IPS) to accomplish in-flight ice removal.
An IPS functions in either an advisory or primarycapacity. Advisory systems rely upon the flight crewto activate ice protection devices based upon data re-ceived from icing and environmental sensors. On mostcommuter aircraft, icing sensors are not available andpilots determine the level of ice accretion by visualinspection of the wings and control surfaces. Thistype of visual ice detection is inadequate because pi-lots usually cannot see all of the wing or any of the tail.Systems that function in a primary capacity utilize in-formation from icing sensors to automatically activate
1 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
Ice AccretionSensors
Pilot/Automation
IceAccretion
Advisory
Ice ProtectionSystem(IPS)
Ice Effects
Information! - _ _ _ _ . . _ _ _ _ _ _
Pilot Input
EnvelopeProtection
AircraftDynamics
Ice ManagementSystem(IMS)
, ._
i Control Adaptation
Primary IPS Operation
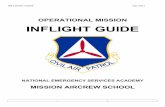
Fig. 1 Aircraft icing encounter model.
anti-ice and de-icing devices. The flight crew is givenupdates concerning IPS status and may manually over-ride the system. Current ice protection equipmentconsists mainly of devices that bleed hot engine ex-haust onto the wings to prevent icing or inflatableboots that break off accumulated ice.
Recent icing accidents have shown that the IPS ap-proach does not always adequately provide safe andreliable flight during icing conditions. In fact, theATR-72 accident resulted from ice that accreted aftof the wing de-icing system.4 In response to the defi-ciencies of the current IPS, a new approach has beenintroduced.2 This approach adds a new Ice Manage-ment System (IMS) that works in cooperation withthe existing IPS. The purpose of the IMS is to continu-ally monitor ice accretion and its effects, automaticallyoperate the existing IPS and provide the flight crewwith an assessment of the aerodynamic performance.It may also adapt flight controls to allow safe and re-liable flight through icing conditions.
Ice Management System
The IMS approach is being developed by the Uni-versity of Illinois Icing Center and is a cooperativeeffort among researchers from several disciplines in-cluding control systems, aerodynamics, flight dynam-ics, and human factors.2 The objective of the IMS isto provide an additional layer of defense that guardsagainst aircraft icing accidents. This objective is ac-complished by monitoring ice accretion and its effectsupon aircraft flight dynamics. The IMS works in co-operation with existing ice protection systems and theflight crew in order to effectively use all available data.A block diagram depicting the operation of the IMSduring an icing encounter is shown in Figure 1. The
solid lines portray the current state of the art and thedashed lines show the additional capability providedby the IMS. The IMS adds complexity but also createsan aircraft that is much more robust to the effects ofice accretion.
The purpose of the IMS is to allow safe and con-trollable flight when hazardous icing conditions can-not be avoided. The IMS accomplishes this task byperforming three main functions. First, ice must bedetected and then classified in order to determine thedetrimental effects upon aircraft stability and control.Second, the IPS must be automatically activated andoperated while the IMS provides the pilot with contin-ual updates concerning aircraft performance. Third,the flight envelope and aircraft control laws may beadjusted when severe ice creates potentially uncontrol-lable conditions. This allows the IMS to protect theaircraft against traditional icing handling events suchas roll upset and tailplane stall. Following envelopemodification, the flight crew will be notified and canthen successfully navigate using limited maneuvers un-til the icing conditions are eliminated.
Effective IMS performance depends heavily uponaccurate detection and classification of icing events.Since icing is a concern precisely to the extent thatit affects the flight dynamics, parameter identifica-tion of the flight dynamics is a critical element ofthe IMS.5'6 Exhaustive simulation results have demon-strated the superior robustness and convergence prop-erties of H°° identification techniques in the presenceof disturbances and measurement noise; hence in thiswork an H°° parameter identification technique hasbeen adopted wherein stability and control derivativescritically related to icing are estimated. Along with
2 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
these parameter estimates, a rich array of measure-ments are available that contain information on theicing degradation, including steady-state characteriza-tion, hinge moment sensing, and environmental, aero-dynamic, and icing sensor information. The IMS alsoincorporates this information in the "sensor fusion"function referred to in.2 Based on this information, theIMS provides (i) an initial indication of the presence ofice accretion that relies heavily on ice probe measure-ments, if they are available, followed by (ii) a charac-terization of the type and severity of the degradationof the flight dynamics, where by "type" we mean todiscriminate between, for example, effects leading totailplane stall and those leading to roll upset. Basedupon this characterization, the flight envelope will beadjusted and control laws may be reconfigured.
ICING CHARACTERIZATIONIn,7 we have advocated a neural network that char-
acterizes degradation of the aircraft flight dynamicsbased upon sensor data and parameter estimates. Thischaracterization may be accomplished through a va-riety of other methods, but neural networks are usedbecause of their ability to extract information simulta-neously from multiple data sources that depend on thedesired information in a complex manner. It is alreadyknown8 that a feed-forward neural network with atleast one hidden layer is able to approximate any con-tinuous function to an arbitrary level of accuracy onany bounded set given ideal training. Neural networksalso have inherent parallel properties that provide a ro-bust and fault-tolerant structure. Networks are prac-tical for aircraft applications because, following initialtraining, they process information very rapidly. Rapidcomputation can be achieved because the majorityof mathematical operations involve addition, subtrac-tion, or multiplication.
Previous work by the authors, reported in,7 appliedneural networks to icing detection and classificationduring a normal operational maneuver modeled as anelevator doublet. In that case, the neural networksincorporated only longitudinal stability and controlderivative estimates, as the estimates were fairly ac-curate even in the presence of disturbances and mea-surement noise due to the excitation of the maneuver.In this limited scenario, neural networks were found toprovide an accurate icing indication along with a lessaccurate but still sufficient classification of the icingseverity.
In this study, we address the more common steady-level flight conditions, where the absence of excitationdue to pilot input limits the effectiveness of parameteridentification. Even so, it has been shown that exci-tation due to turbulence can be exploited to provideuseful parameter estimates, albeit estimates that con-verge much more slowly.6 In general, a longer delayin icing indication is more acceptable during steady
level flight than during a maneuver since precipita-tion of an icing event is less likely in the absence ofpilot action. Moreover, in this paper we address thesensor fusion function of the IMS by incorporating,in simulation, information not taken advantage of inthe previous work.7 Whereas environmental and iceprobe measurements primarily provide information onthe rate of ice accretion, increased hinge moments andsteady-state effects provide information on icing degra-dation.9 By steady-state effects, we mean specificallychanges in trim conditions consistent with increaseddrag and decreased lift characteristic of icing eventsduring flight conditions with minimal aircraft accelera-tions (e.g., steady, level flight). The unpredictability ofice shedding and the highly complex nature of the de-pendence of flight dynamics degradation on the shape,roughness, and location of ice makes correlation of theice accretion rate and the flight dynamics degradationdue to icing difficult. While future efforts will be madeto incorporate traditional atmospheric and ice probemeasurements, we are focusing now on demonstratingthe feasibility of the more novel aspects of the IMS ap-proach. Hence in this paper we incorporate only thesteady-state characterization and hinge moment sens-ing along with the parameter estimates into the icingcharacterization. Finally, we again restrict our atten-tion to longitudinal dynamics.
Neural Network ApproachAs with the previous neural network results, we take
the icing severity factor rj as a measure of the degra-dation of the flight dynamics due to ice accretion.However, for the sake of clarity, we normalize rj by thenominal icing condition that corresponds to the NASATailplane Icing Program simulated icing condition.10*Since rj is actually a measure of the cumulative poten-tial atmospheric icing severity for an aircraft, the useof 77 as a measure of the flight dynamics degradationis consistent with the assumption that no ice shedding(due to activation of the ice protection system, for ex-ample) occurs. Furthermore, we are largely ignoringthe complex relationship between atmospheric condi-tions on the one hand and flight dynamics degradationon the other. At present, the icing severity factor isthe best measure of icing degradation available, andhence we adopt it despite its limitations in this ca-pacity. As in,9 we address icing encounters duringperiods of steady, level flight wherein the icing sever-ity increases linearly over ten minutes from an initialclean condition.
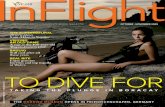
A block diagram of the IMS is depicted in Figure 2.In the upper left corner of the figure, the flight dy-namics are subject to the unknown turbulence andmeasurement noise input. As discussed in5'6 theseunknown exogenous signals fundamentally limit the
*In9 this nominal icing condition corresponds to a value of77 = 0.0675.
3 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
MeasurementNoise
Turbulence
IcingCharacterization
NeuralNetwork
Clean TrimCharacterization
Fig. 2 IMS neural network block diagram.
accuracy of the parameter estimates, and hence mustbe included in any realistic simulation. From the flightdynamics we have measurements of the wing and tailhinge moments (7^ and C£ along with correspondingroot-mean-square hinge moment measurements C%rrn8and Cfrrrns. The hinge moment model is describedin.11 From the flight dynamics, we also have measure-ments of total velocity V, angle of attack a, pitch rateg, pitch angle 0, and elevator angle SE- From thesemeasurements we estimate the flight dynamics trimvelocity V", trim angle of attack a, and trim elevatorangle 1̂ by lowpass filtering the corresponding mea-sured signals at 1/30 Hz. This estimated trim is usedby the dynamic parameter identification as well as be-ing provided to the neural network directly, since theH°° ID algorithm is based on a dimensional deriva-tive flight dynamics model5 and hence depends uponthe flight dynamics trim condition. The trim condi-tions are also used to calculate the expected clean S/Cderivatives M£ and M% against which the estimatedS/C derivatives Ma and Mq must be compared inorder to ascertain icing degradation. Furthermore, ex-pected clean-aircraft trim values Vc, ac, and 8C
E mustbe calculated to provide a reference for interpreting theestimated trim values. In the following simulations,the initial trim values are used as expected clean trim,consistent with steady, level flight scenarios. Whenmore general scenarios are considered in the future, amore sophisticated calculation of expected clean trimwill have to be included. Since the dynamic identifi-cation algorithm is expected to perform better under
larger excitation and the steady-state characterizationis expected to have better accuracy under smaller exci-tation, we have also calculated measures of excitationin order to aid the neural network in discriminat-ing between dynamic parameter ID and steady-statecharacterization. As excitation measures we use anestimate of the dynamic portion of the power of themeasured signals, denoted as Pa,calculated according to
Pg, and PSB and
P« = (a - a)2,
and
The excitation measures and all other input to theneural network are lowpass filtered by batch averagingeach signal over the past 1/2 second in order to reducethe effect of measurement noise. Finally, the neuralnetwork provides an estimate of the icing severity r\at any given time instant t based only on the lowpassfiltered input at that time t. In summary, the neuralnetwork incorporates the following batch filtered input
• hinge moment measurements: wing and tail hingemoments CJ[ and C^ and rms wing and tail hingemoments C%rms and firms'
steady-state characterization: estimated trim val-ues V\ a, and SE and expected clean trim valuesFc, ac, and S
4 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
• dynamic parameter identification: estimated S/Cderivatives Ma and Mq and expected clean S/Cderivatives M£ and M*
• excitation measure: Pa, Py, Pg, and P^
In order to be useful, the neural network mustprovide accurate icing characterizations over a broadrange of trim conditions and turbulence intensity. Fur-thermore, the icing characterization network must ac-curately identify clean aircraft in order to avoid falsealarms. The neural networks are applied in 600-ssimulations modeling a rich set of steady, level flightscenarios that correspond to combinations of the fol-lowing variations
• final icing severity levels of 0, 0.02, 0.04, 0.06,0.08, or 0.1,
• initial total velocities of 60, 65, 70, or 80 m/s,
• tail-only icing or wing and tail icing,
• turbulence level standard deviations of 0, 0.15, or0.3 </, and
• two each of turbulence and measurement noisesample paths for all cases.
Bach simulation was run under the assumption of con-stant engine power, with a zero flight path angle (z.e.,level flight), and at an altitude of 2,300 m. Simula-tions were performed with the aid of the FDC Mat-lab/Simulink toolbox as described in.9 Furthermore,measurement noise consistent with Twin Otter instru-ment accuracy specifications, listed in Table 1, wereincorporated as zero-mean, bandlimited white Gaus-sian noise. The simulations provided all measurementinformation at a 30 Hz sample rate.
Table 1 Measurement noise intensities taken fromNASA Twin Otter instrument resolution specifica-tions as reported by Ratvasky and Ranaudo.12
Oq______<70_____GO.______&u____0.0167°/s 0.0293° 0.003° 0.076 knot
Neural Network Architectures and AnalysisAs in,7 we use a sigmoidal back-propagation neu-
ral network structure. Once the structure of a neuralnetwork is determined, the biases and weights of thenodes and connections, respectively, are determinedvia numerical optimization with respect to the leastsquares error between the known output and the net-work output from a suite of training data. Of the dataavailable from the simulation cases described above,training data was obtained by sampling the measure-ments at 41 s intervals from each of the cases. Thenetworks were trained using supervised learning witha back-propagation algorithm. Back propagation con-sists of a gradient-based approach that runs training
sets through the neural network and adjusts variousweights and biases until the most accurate output isgiven for all training sets.
Several networks were trained and tested in orderto investigate the performance of the proposed IMSas well as the utility of the various sets of measure-ment information. The first neural network is the IMSneural network that was trained and tested using thehinge moment measurements, steady-state character-ization, parameter identification, and excitation. Asecond limited IMS neural network was trained andtested on all but the hinge moment measurements inconsideration of (i) the possibility that hinge momentmeasurements are not available, and (ii) the imma-turity of the hinge moment model. Next, several ofneural networks were each trained and tested on in-dividual sets of information. The accuracy of theseneural networks is not considered as a prediction ofthe performance of the IMS, rather their performanceis used to evaluate the usefulness of each informa-tion source. In this analytical capacity, we have used(i) a hinge moment neural network, (ii) a steady-statecharacterization neural network, and (iii) a parameteridentification neural network.
For each neural network listed above, the networkstructure was determined via trial and error with atleast three attempts at training for each. In each casethe most accurate network was selected for inclusionin this paper. The architectures of each are
• IMS network: three hidden layers of seven nodes,twelve nodes, and five nodes, respectively,
• Limited IMS network: three hidden layers of ninenodes, seven nodes, and seven nodes, respectively,
• Hinge moment network: three hidden layers offive nodes each,
• Steady-state characterization network: three hid-den layers of nine nodes, seven nodes, and sevennodes, respectively,
• Parameter ID network: three hidden layers offour nodes, five nodes, and four nodes, respec-tively.
NETWORK SIMULATION RESULTSOnce the networks were trained with the reduced
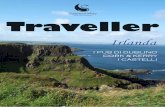
data set, they were applied successively to each of the150 simulation cases.t As an example, the IMS net-work estimates f) as well as the actual values 77 areplotted for a particular simulation case of the IMSneural network in Figure 3. The general accuracy ofthe neural networks over the entire suite of simulationcases is measured by the root-mean-square 77 estimate
t Several simulation cases failed to trim successfully, andhence were discarded.
5 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
error and can be graphically depicted by a scatter plotsuch as in Figure 4 where the 77 estimate at each sam-ple instant is plotted versus the actual 77 value at thatinstant for the IMS network. Furthermore, we have es-timated the error distribution of each network over allsimulation sample instants (i.e., 0-600s at 30 Hz) bycalculating a histogram. Figure 5 displays a histogramfor the IMS neural network.
1.5r
200 400 600Fig. 3 IMS neural network rj estimate along withactual value of rj for a sample simulation. This sim-ulation had an initial velocity of 70 m/s, an initialaltitude of 2,300 m, both wing and tailplane icing,and no turbulence.
Fig. 4 Scatter plots of IMS neural network es-timated 77 versus actual (instantaneous) r\ over allsimulation runs. A perfect neural network wouldhave all points lying on the depicted line of slopeone.
Although the icing severity estimate for the IMSneural network can have significant error at a givensample instant as shown in Figure 3, Figures 4 and 5clearly indicate that these significant errors are rarein the set of all simulation sample instants. In fact,detailed study of all simulation cases for the IMS net-work, which are not included here for the sake ofbrevity, reveal that the simulation case depicted inFigure 3 is the worst case in terms of estimate er-
100r
80
0.005 0.01
Fig. 5 Distribution of the 77 estimate error forthe IMS neural network over all simulation runsexpressed in terms of percentage. The distributionhas mean of —2.8 x 10~6 and standard deviation of4.4 x 1(T4.
ror, and moreover that all other cases appear perfecton visual inspection. The IMS network has a meanerror of —2.8 x 10~6, an error standard deviation of4.4 x 10~4, and an error of greater than 0.01 (i.e., 1%of the difference between a clean aircraft and a nom-inally iced aircraft) for only 0.05% of simulation timeinstants. This exceptional performance, along with theimmature nature of the hinge moment model, begs thequestion: which measurements are responsible for theperformance?
10"
10"
10"
10"
10
10'
—— IMS Network- - Hinge Moment• • • • • • Trim Characterization• - • - Parameter Identification— Limited IMS Network
0.15 0.3
Fig. 6 Root-mean-square 77 estimate error versusturbulence level (in g) for several neural networkstrained on various information sources. The IMSnetwork is trained on all available information, andthe limited IMS network uses all but the hinge mo-ment measurements.
The answer to this question lies in Figure 6, wherethe root-mean-square errors for the IMS network, thelimited IMS network, and three networks trained ononly hinge moment measurements, only steady-statecharacterization, and only parameter ID are plottedas a function of the turbulence level. These results
6 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
clearly demonstrate that the hinge moment measure-ments are primarily responsible for the excellent accu-racy of the IMS network. Furthermore, while the trimcharacterization performs fairly well, the parameteridentification performs quite poorly. This is surprisinggiven the results for time-varying H°° parameter iden-tification for icing characterization during steady, levelflight reported in.6 This unexpected poor performanceis most likely due to the trim condition variationsthat were not considered in the previous work, whichassumed a linear model. Since the identification isbased on a dimensional derivative model, the expectedclean parameters can exhibit changes due to trim ve-locity variations that are much larger than changesin parameters due to icing. Presently the parameteridentification is being converted to an algorithm basedon dimensionless derivatives, thus removing to a largedegree the dependence of the clean parameters uponthe trim condition.
0Pig. 7 Scatter plot of limited IMS neural networkestimated 77 versus actual (instantaneous) rj over allsimulation runs. A perfect neural network wouldhave all points lying on the depicted line of slopeone.
Since the exceptional performance of the IMS net-work is primarily due to the hinge moment measure-ments, investigation of an IMS that does not rely onthose measurements, e.e.,the limited IMS, is a naturalstep. A scatter plot for the limited IMS is given inFigure 7, and a distribution histogram is given in Fig-ure 8. Although the errors for this network are clearlylarger than those for the IMS network that incorpo-rates hinge moment measurements, they are generallyacceptable. As with the IMS network, the limited IMSnetwork exhibits relatively rare large errors only veryrarely. In this case, the network has a mean error of-1.8 x 10~7, an error standard deviation of 1.7 x 10~3,and errors larger than 10% of the difference betweena clean aircraft and a nominally iced aircraft occur inonly 0.37% of the sample instants. In order to pro-vide perspective for these results, Figures 9-14 displaythe estimated and actual 77 values for several of the
100
80
60
40
I.05 0.05
Fig. 8 Distribution of the limited IMS network r\estimate error over all simulation runs expressedin terms of percentage. The distribution has meanof -1.8 x 10~7 and standard deviation of 1.7 x 10~"3.
more inaccurate simulation cases for the limited IMSnetwork.
1.5
0.5
0 200 400 600Fig. 9 Limited IMS neural network rj estimatealong with actual value of rj for a simulation withan initial velocity of 70 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and a tur-bulence amplitude of cr = 0.30.
CONCLUSIONThis paper advocates a neural network approach for
characterizing longitudinal flight dynamics degrada-tion due to icing during steady, level flight. Consistentwith previous work,7 we have again adopted the ic-ing severity factor 77 as a measure of degradation ofthe flight dynamics due to icing. The network incor-porates (i) stability and control derivative estimatesfrom a dynamic parameter identification algorithm,(ii) steady-state characterization based on trim condi-tion estimates, (iii) hinge moment measurements, and(iv) measures of the excitation of the flight dynamics.The measures of excitation are included so that thenetwork can reconcile parameter identification, whichis more accurate during periods of rich excitation, and
7 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
1.5——————————————————n 1.5——————————————————
200 400 600Fig. 10 Limited IMS neural network 77 estimatealong with actual value of 77 for a simulation withan initial velocity of 70 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and no tur-bulence.
1.5
0.5
0 Ao 200 400 600
Fig. 11 Limited IMS neural network 77 estimatealong with actual value of rj for a simulation withan initial velocity of 70 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and a tur-bulence amplitude of cr = 0.15<?.
steady-state characterization, which is more accurateduring periods with less excitation. The IMS neuralnetwork was tested on a set of simulation cases thatvaried over a wide range of steady, level flight operat-ing conditions. Each simulation case consisted of tenminutes of data generated at 30 Hz. The IMS net-work was applied to the simulated data at each timeinstant, and the estimated 77 is compared with the ac-tual 77 in order to generate error statistics. The IMSnetwork is exceptionally accurate, with 77 estimate er-rors greater than 0.01 for only 0.05% of simulationtime instants, where 77 = 0.01 corresponds to 1% ofthe difference between a clean aircraft and the icingdegradation corresponding to the NASA Tailplane Ic-ing Program simulated ice.
In order to determine which class of data was mostuseful, we used the RMS error of networks trained
0.5
o0 200 400 600
Fig. 12 Limited IMS neural network 77 estimatealong with actual value of rj for a simulation withan initial velocity of 65 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and no tur-bulence.
1.5
0.5
00 200 400 600
Fig. 13 Limited IMS neural network rj estimatealong with actual value of 77 for a simulation withan initial velocity of 80 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and a tur-bulence amplitude of v = 0.150.
on each individual data class, hinge moment measure-ments, steady-state characterization, and parameteridentification, as a measure of the utility of that data.Prom this analysis, it was found that the hinge mo-ment measurements were primarily responsible for theexcellent performance of the IMS network. Moreover,the analysis demonstrated surprisingly poor parame-ter identification performance, despite the promisingresults reported previously by the authors.6 This poorperformance is most likely due to the fact that the pa-rameter identification algorithm is based on a dimen-sional derivative model, and that the previous resultsused a linear flight dynamics model to generate sim-ulation data. Presently, an identification algorithmbased on dimensionless derivatives is being developedto address this inconsistency.
Finally, cautiousness regarding the immaturity of
8 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542

c)2001 American Institute of Aeronautics & Astronautics or Published with Permission of Author(s) and/or Author(s)' Sponsoring Organization.
1.5
0.5
o0 200 400 600
Fig. 14 Limited IMS neural network 17 estimatealong with actual value of 77 for a simulation withan initial velocity of 80 m/s, an initial altitude of2,300 m, both wing and tailplane icing, and a tur-bulence amplitude of a- = 0.150.
the hinge moment model motived us to investigate aneural network that does not use hinge moment mea-surements. Simulation results for this limited IMSnetwork^ while less accurate than the IMS network,still achieve a high degree of accuracy, with 77 estimateerrors larger than 10% of the difference between a cleanaircraft and a nominally iced aircraft occurring in only0.37% of the simulation sample instants.
ACKNOWLEDGMENTThis work was supported in part by NASA, and
in part by the University of Illinois at Urbana-Champaign under the Critical Research Initiative Pro-gram. We thank Evgeniy Sklyanskiy for his effortin training dozens of neural networks and performinghundreds of network simulations.
References1J. Cole and W. Sands, "Statistical study of aircraft icing
accidents," in Proc. 2&h AIAA Aerospace Sciences Meeting andExhibit, no. AIAA-91-0558, (Reno, NV), Jan. 1991.
2M. B. Bragg, W. R. Perkins, N. B. Sarter, T. Ba§ar, P. G.Voulgaris, H. M. Gurbacki, J. W. Melody, and S. A. McCray,"An interdisciplinary approach to inflight aircraft icing safety,"in Proc. 36th AIAA Aerospace Sciences Meeting and Exhibit,no. AIAA-98-0095, (Reno, NV), Jan. 1998.
3 "Weather investment recommendations," NASA Aeronau-tics Safety Investment Strategy, technical report, Apr. 1997.
4 "Aircraft accident report, in-flight icing encounter and lossof control, ATR model 72-212, Roselawn, Indiana, October 31,1994," National Transportation Safety Board, Technical ReportNTSB/AAR-96/01, 1996.
5J. W. Melody, T. Ba§ar, W. R. Perkins, and P. G. Voul-garis, "Parameter identification for inflight detection of aircrafticing," Control Engineering Practice, vol. 8, pp. 985-1001, Sept.2000.
6J. W. Melody, T. Hillbrand, T. Ba§ar, and W. R. Perkins,"Parameter identification for inflight detection of aircraft icing:the time-varying case," in Proc. IFAC System IdentificationSymposium, (Santa Barbara, CA), June 2000.
7E. A. Schuchard, J. W. Melody, T. Ba§ar, W. R. Perkins,and P. Voulgaris, "Detection and classification of aircraft icingusing neural networks," in Proc. 38th AIAA Aerospace SciencesMeeting and Exhibit, no. AIAA-2000-0361, (Reno, NV), Jan.2000.
8K. Hornik, M. Stinchcombe, and H. White, "Multilayerfeedforward networks are universal approximators," Neural Net-works, vol. 2, no. 5, pp. 359-366, 1989.
9M. B. Bragg, T. Hutchison, R. Oltman, D. Pokhariyal, andJ. Merritt, "Effect of ice accretion on aircraft flight dynamics,"in Proc. 38th AIAA Aerospace Sciences Meeting and Exhibit,no. AIAA-2000-0360, (Reno, NV), Jan. 2000.
10T. P. Ratvasky, J. F. Van Zante, and J. T. Riley,"NASA/FAA tailplane icing program overview," in Proc. 37th
AIAA Aerospace Sciences Meeting and Exhibit, no. AIAA-99-0370, (Reno, NV), Jan. 1999.
UD. Pokhariyal, M. B. Bragg, T. Hutchison, and J. Merritt,"Aircraft flight dynamics with simulated ice accretion," in Proc.39th AIAA Aerospace Sciences Meeting, no. AIAA-2001-0541,(Reno, NV), Jan. 2001.
12 T. P. Ratvasky and R. J. Ranaudo, "Icing effects on aircraftstability and control determined from flight data," in Proc. 318t
AIAA Aerospace Sciences Meeting and Exhibit, no. AIAA-93-0398, (Reno, NV), Jan. 1993.
9 OF 9
AMERICAN INSTITUTE OF AERONAUTICS AND ASTRONAUTICS PAPER 2001-0542