Robot Optimized for Painting MOTOMAN-EPX...
12
Certified for ISO9001 and ISO14001 Robot Optimized for Painting MOTOMAN - EPX Series R009 QMS Accreditation JQA-EM0924 JQA-0813
Transcript of Robot Optimized for Painting MOTOMAN-EPX...

Certified for
ISO9001 and
ISO14001
Robot Optimized for Painting
MOTOMAN-EPX Series
R009QMS Accreditation JQA-EM0924JQA-0813

Complete product lineup for better surface finish
MOTOMAN-EPX Series
Robot Optimized for Painting
Manipulator lineup in accordance with workpiece size
EPX1250[ Orthogonal wrist ]
EPX2050[ Hollow slim arm ]
EPX2800[ Hollow slim arm ]
EPX2800R[ Hollow slim arm ]
EPX2900[ Hollow arm (Hollow process arm) ]
EPX2700[ Hollow arm ]
EPX2750[ Lemma wrist ]
EPX2050[ Lemma wrist ]
General industrial applications, Small workpiecesMobile telephones, reflectors,etc.
Automotive industry applications, Large workpiecesAutomobile bodies, bumpers, heavy machine, steel products, house material, etc.
S m a l l r o b o t M e d i u m r o b o t L a r g e r o b o t
L a r g e r o b o t
Shelf-mounted type
Wall-mounted type
Rotation
Bending
Bending
Hollow wrist (H-type) Lemma wrist (L-type)
Based on the concept of having a broad range of motion with a compact design, Yaskawa’s MOTOMAN robots continue to
evolve as optimized robot in functions and performance for each application. The rich lineup in the MOTOMAN-EPX series
provides robots with a variety of features, including optimal wrist structures for each type of workpiece, arms with internally
routed hoses, and a high-performance controller. The best robot for the application can be chosen to ensure high-quality painting.
Hoses and cables can
be contained inside the
wrist. No interference
with workpieces can
shorten tact time.
Without any singular point in
front, the EPX robots with
lemma wrists are ideal for
painting horizontal and vertical
planes as well as painting
items in synchronization with
the conveyor.
Wrist Structures
Automotive industry applications, Large workpiecesAutomobile bodies, bumpers, heavy machine, steel products, house material, etc.
Explosion proof certification: Conforms to TIIS, FM, and ATEX.
2

3
Dimensions Units : mm : P-point Maximum Envelope
Floor-mounted
Manipulator Specifi cations
Allowable Moment*2
R -axis (wrist roll) 8.0 N·m (0.82 kgf·m)
B -axis (wrist pitch/yaw) 8.0 N·m (0.82 kgf·m)
T -axis (wrist twist) 3.0 N·m (0.3 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 0.20 kg·m2
B -axis (wrist pitch/yaw) 0.20 kg·m2
T -axis (wrist twist) 0.07 kg·m2
Mass 110 kg
Ambient Conditions
Temperature 0 to +40˚C
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 1.5 kVA
Installation Floor, Wall, or Ceiling-mounted
Max Mass of Painting Devices on Robot 5 kg including parts mounted in the wrist
Max Mass for Painting Devices on Robot Base 10 kg each for E and F sections (See View B)
Type of Explosion-proof Combination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed), FM (Pending), ATEX (Pending)
Ideal for Painting Small Parts!
The compact design enables a broad range of motion.
Space-saving painting booth has been achieved by a compact controller
and various mounting methods for the manipulator.
A compact bell gun can be mounted for high-quality painting.
Note: SI units are used for specifi cations.
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
Model MOTOMAN-EPX1250
Type YR-EPX1250-*0**Controlled Axis 6 (Vertically articulated)
Payload 5 kg
Repeatability*1 ±0.15 mm
Range of Motion
S -axis (turning) −170˚ − +170˚ (−60˚ − +60˚ when mounted on the wall)
L -axis (lower arm) −65˚ − +120˚
U -axis (upper arm) −165˚ − +205˚
R -axis (wrist roll) −190˚ − +190˚
B -axis (wrist pitch/yaw) −145˚ − +145˚
T -axis (wrist twist) −360˚ − +360˚
Maximum Speed
S -axis (turning) 3.23 rad/s, 185˚/s
L -axis (lower arm) 3.23 rad/s, 185˚/s
U -axis (upper arm) 3.23 rad/s, 185˚/s
R -axis (wrist roll) 6.28 rad/s, 360˚/s
B -axis (wrist pitch/yaw) 7.16 rad/s, 410˚/s
T -axis (wrist twist) 8.73 rad/s, 500˚/s
Wall-mounted
MOTOMAN-EPX1250Small painting robot, 5-kg payload
View A
View B
Orthogonal wrist
R510
R1256
170°
170°
128
300
215204
229.5 234
17108
131
45°P.C.D.27.5
3.5
5
260
26
0
30
0
102±0.1 102±0.1
139±
0.1
300
153±0.1
153± 0
.1
390 9
53
0
9530
350
139±
0.1
310
520
130
86
10
46
200 520 86.5
70°
65°
2063
486
1366
T
B
U
L 1852
R
140°
120°
S
310 520 130 86
1046
20
08
6.5
70°
65°
20
63
486 1366
T
B
U
L
1852
R
140°
120°
S
520
R510
R1256
128
300
60° 60°
A
B
E :Tapped holes M6(2 holes) (Pitch: 1.0)
F :Tapped holes M6(2 holes)(Pitch: 1.0)
Model: - A000 Rear feedercable connection
Model: - A002 Bottom feedercable connection
20 d
ia. H
6
36 d
ia. h
6 Tapped holes M5(4 holes) (Depth: 9 mm)(Pitch: 0.8)
5 dia. H7(1 hole) (Depth: 6 mm)
12 dia. H7 through holesfor reference (2 holes)
Scavenging port 12 dia.(air hose outside diameter)
18 dia.through holes(4 holes)
Exhaust port 12 dia.(air hose outside diameter)
Model: - A000 Rear feedercable connection
Model: - A002 Bottom feedercable connection
P-point
P-point

4
Dimensions Units : mm : P-point Maximum Envelope
Manipulator Specifi cations
MOTOMAN-EPX2050Medium painting robot, Lemma wrist
View A
View B
10-kg payload
Teaching for painting synchronized with conveyor movement is easy, because the
wrist has no singular points in the front area.
With a MOTOFEEDER, painting workpieces on mesh and on spindles is possible.
Compact controller saves space.
Ideal for painting horizontal and vertical planes in synchronization with the conveyor.
Model MOTOMAN-EPX2050
Type YR-EPX2050-*3**Controlled Axis 6 (Vertically articulated)
Payload 10 kg
Repeatability*1 ±0.5 mm
Range of Motion
S -axis (turning) −90˚ − +90˚ (−27.5˚ − +27.5˚ when mounted on the wall)
L -axis (lower arm) −50˚ − +100˚
U -axis (upper arm)+5˚ − +163˚ (For the range of +5˚ to +10˚ : the R-axis motion range is limited to −260˚ to −65˚, and +60˚ to +260˚ .)
R -axis (wrist roll)−260˚ − +260˚ (For the range of −145˚ to −20˚ , and +125˚to +260˚ : the B-axis motion range is limited to −195˚ to +15˚ .)
B -axis (wrist pitch/yaw) −270˚ − +270˚
T -axis (wrist twist) −260˚ − +260˚
Maximum Speed
S -axis (turning) 123.5˚/s
L -axis (lower arm) 120˚/s
U -axis (upper arm) 123.5˚/s
R -axis (wrist roll) 360˚/s
B -axis (wrist pitch/yaw) 360˚/s
T -axis (wrist twist) 360˚/s
Note: SI units are used for specifi cations.
L- t
yp
e W
rist Allowable
Moment*2
R -axis (wrist roll) 30.4 N·m (3.1 kgf·m)
B -axis (wrist pitch/yaw) 19.6 N·m (2.0 kgf·m)
T -axis (wrist twist) 9.8 N·m (1.0 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 0.97 kg·m2
B -axis (wrist pitch/yaw) 0.40 kg·m2
T -axis (wrist twist) 0.10 kg·m2
Mass 370 kg
Ambient Conditions
Temperature 0 to +40˚C
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Floor, Wall, or Ceiling-mounted
Max Weight of Painting Devices on Arm 20 kg including parts mounted in the wrist
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed), FM (Pending), ATEX (Application being planned)
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
A
B
* : When mounted on the wall
240240
647
17
83
21
5
640
215 215
215
48
0
0
0
10
20
35°
60
085
02
45
300
P-point
850 93
57
5
92
5
48
6
2035
285
438
860
2031
2335
406432
2767
100°
50°50° 5°
163°
62
0
3055
P.C.D.32
Tapped holes M6(8 holes) (Depth: 9 mm)
0.5
180°
P-point
R2035
16
5
55°*
S
U
L
B
R
R58
6
R620
T
14
1.5
14
dia
. H
7
45 d
ia.
( Ro
tatio
n o
ute
r d
ia.)
70 d
ia.
18 dia.(4 holes)

5
Dimensions Units : mm : P-point Maximum Envelope
Manipulator Specifi cations
Hollow slim arm*
Hollow, slim arm!
Dimensions Units : mm : P-point Maximum Envelope
View A
View B
MOTOMAN-EPX2050Medium painting robot, 15-kg payload
No interference with workpieces, because tubes for painting guns can be
installed inside the hollow, slim arm.
Painting devices can be mounted on the arm to shorten color changing time
and save paint and thinner.
*: Inner diameter 50 mm
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
Note: SI units are used for specifi cations.
H- t
yp
e W
rist Allowable
Moment*2
R -axis (wrist roll) 45.8 N·m (4.67 kgf·m)
B -axis (wrist pitch/yaw) 33.8 N·m (3.45 kgf·m)
T -axis (wrist twist) 10.8 N·m (1.1 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 1.45 kg·m2
B -axis (wrist pitch/yaw) 0.79 kg·m2
T -axis (wrist twist) 0.10 kg·m2
Mass 540 kg
Ambient Conditions
Temperature 0 to +40˚C (FM standard: 0 to +45˚C)
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Floor or Wall-mounted
Max Weight of Painting Devices on Arm 40 kg including parts mounted in the wrist
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed) ,FM (Certifi ed) ,ATEX (Certifi ed)
Model MOTOMAN-EPX2050
Type YR-EPX2050-*5**Controlled Axis 6 (Vertically articulated)
Payload 15 kg
Repeatability*1 ±0.5 mm
Range of Motion
S -axis (turning) −90˚ − +90˚
L -axis (lower arm) −50˚ − +100˚
U -axis (upper arm) +5˚ − +163˚
R -axis (wrist roll) −360˚ − +360˚
B -axis (wrist pitch/yaw) −360˚ − +360˚
T -axis (wrist twist) −360˚ − +360˚
Maximum Speed 2.0 m/s
270241
248.5
18
64
240
647
240
90˚
90˚
R685
R2054
R590
215
215
48
0
215 215 51
266
650
60˚60˚
P.C.D
.102
5˚
20˚
85˚
73
˚
95
1855
85˚
73˚
50˚
100˚
3128
28
06
2354
2052
1691
913
406
342
0
438
452
1074
98
1
68
5
63
1
52
3
0
300
77
.9
155850194.7
31
08
50
600
P-point
TBRU
L
S
2054
35˚
117
dia
. 50 dia.
B
A
7 (Within 116 dia. h7)
11
6 d
ia. h7
Tapped holes M6(6 holes)(Depth: 11 mm) (Pitch: 1.0)
4 dia. H7(2 holes)(Depth: 7 mm)
18 dia. (4 holes)

6
Dimensions Units : mm : P-point Maximum Envelope
Manipulator Specifi cations
View B
MOTOMAN-EPX2750Medium painting robot, Lemma wrist
View A
10-kg payload
Teaching for painting synchronized with conveyor movement is easy, because the
wrist has no singular points in the front area.
Compact controller saves space.
Ideal for painting horizontal and vertical planes in synchronization with the conveyor.
Note: SI units are used for specifi cations.
Model MOTOMAN-EPX2750
Type YR-EPX2750-*3**Controlled Axis 6 (Vertically articulated)
Payload 10 kg
Repeatability*1 ±0.5 mm
Range of Motion
S -axis (turning) −150˚ − +150˚
L -axis (lower arm) −40˚ − +90˚
U -axis (upper arm) +10˚ − +168˚
R -axis (wrist roll)−260˚ − +260˚ (For the range of −145˚ to −20˚ , and +125˚to +260˚ : the B-axis motion range is limited to −195˚ to +15˚ .)
B -axis (wrist pitch/yaw) −270˚ − +270˚
T -axis (wrist twist) −260˚ − +260˚
Maximum Speed
S -axis (turning) 124˚/s
L -axis (lower arm) 127˚/s
U -axis (upper arm) 112˚/s
R -axis (wrist roll) 360˚/s
B -axis (wrist pitch/yaw) 360˚/s
T -axis (wrist twist) 360˚/s
L- t
yp
e W
rist Allowable
Moment*2
R -axis (wrist roll) 30.4 N·m (3.1 kgf·m)
B -axis (wrist pitch/yaw) 19.6 N·m (2.0 kgf·m)
T -axis (wrist twist) 9.8 N·m (1.0 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 0.97 kg·m2
B -axis (wrist pitch/yaw) 0.40 kg·m2
T -axis (wrist twist) 0.10 kg·m2
Mass 560 kg
Ambient Conditions
Temperature 0 to +40˚C
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Floor-mounted
Max Weight of Painting Devices on Arm 30 kg including parts mounted in the wrist
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed), FM (Pending), ATEX (Application being planned)
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
A
B
P-point
P-point
290
761
290
20
78
300°
R63
8
R2729
R822
16
5
0
60
01
10
0
141
.5
168°
12
69
60
4
28
5
2455
2772
3029
827
176.5
609
729
667
3758
77
0.5
82
29
98
2729
3997.5
0
1298300 93
10°
40°40°40° 90°
108°
168°
7502
50
25
0
265265100
58
0
R
B
S
U
L
T
P.C.D.32
0.5
45
dia
.( R
ota
tio
n o
ute
r d
ia.)
70
dia
.
14
dia
. H
7 Tapped holes M6(8 holes) (Depth: 9 mm)
18 dia.(6 holes)
7
Manipulator Specifi cations
Dimensions Units : mm : P-point Maximum Envelope
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
Note: SI units are used for specifi cations.
Model MOTOMAN-EPX2700
TypeYR-EPX2700-*000
(Right offset)YR-EPX2700-*100
(Left offset)
Controlled Axis 6 (Vertically articulated)
Payload 15 kg
Repeatability*1 ±0.15 mm
Range of Motion
S -axis (turning) −25˚ − +125˚ −125˚ − +25˚
L -axis (lower arm) −65˚ − +140˚
U -axis (upper arm) −65˚ − +90˚
R -axis (wrist roll) −720˚ − +720˚
B -axis (wrist pitch/yaw) −720˚ − +720˚
T -axis (wrist twist) −720˚ − +720˚
Maximum Speed
S -axis (turning) 1.7 rad/s, 100˚/s
L -axis (lower arm) 1.7 rad/s, 100˚/s
U -axis (upper arm) 1.9 rad/s, 110˚/s
R -axis (wrist roll) 7.8 rad/s, 450˚/s
B -axis (wrist pitch/yaw) 7.8 rad/s, 450˚/s
T -axis (wrist twist) 9.6 rad/s, 550˚/s
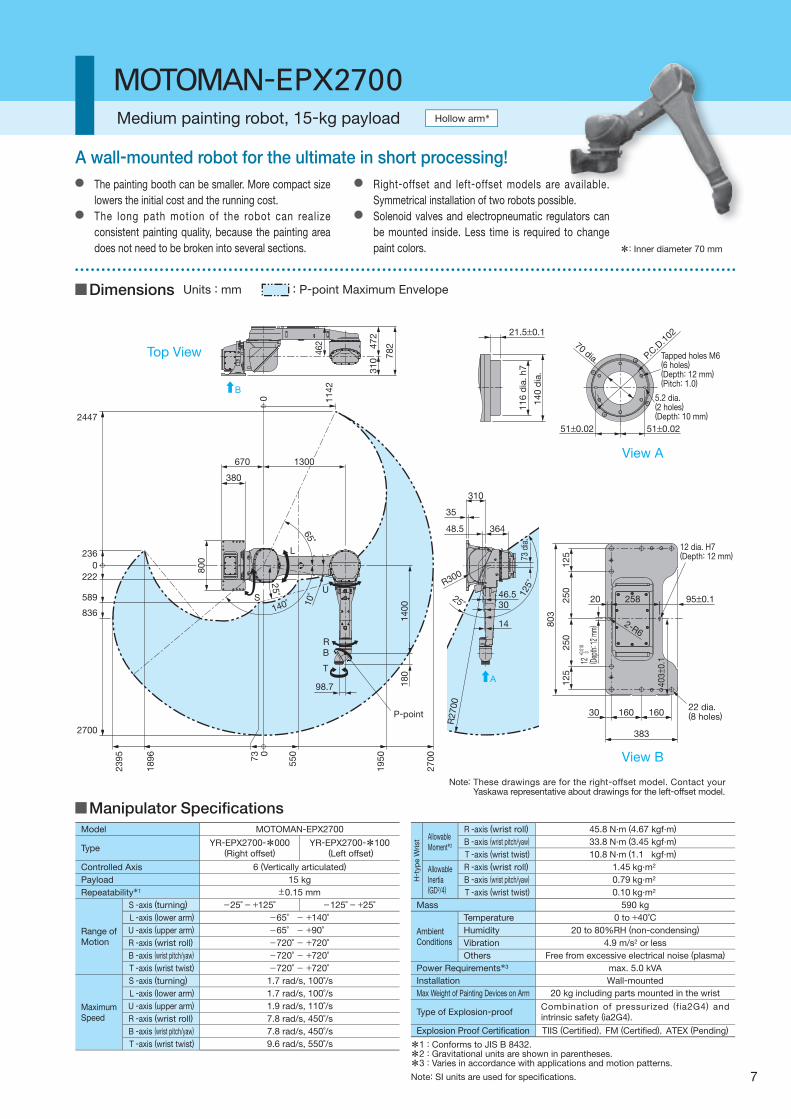
MOTOMAN-EPX2700Medium painting robot, 15-kg payload
View A
Top View
View B
H- t
yp
e W
rist Allowable
Moment*2
R -axis (wrist roll) 45.8 N·m (4.67 kgf·m)
B -axis (wrist pitch/yaw) 33.8 N·m (3.45 kgf·m)
T -axis (wrist twist) 10.8 N·m (1.1 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 1.45 kg·m2
B -axis (wrist pitch/yaw) 0.79 kg·m2
T -axis (wrist twist) 0.10 kg·m2
Mass 590 kg
Ambient Conditions
Temperature 0 to +40˚C
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Wall-mounted
Max Weight of Painting Devices on Arm 20 kg including parts mounted in the wrist
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed),FM (Certifi ed),ATEX (Pending)
The painting booth can be smaller. More compact size
lowers the initial cost and the running cost.
The long path motion of the robot can realize
consistent painting quality, because the painting area
does not need to be broken into several sections.
Right-offset and left-offset models are available.
Symmetrical installation of two robots possible.
Solenoid valves and electropneumatic regulators can
be mounted inside. Less time is required to change
paint colors.
A wall-mounted robot for the ultimate in short processing!
Hollow arm*
*: Inner diameter 70 mm
P.C.D
.10221.5±0.1
23
95 0
1300
27
00
670
380
80
0
73
55
0
P-point
19
50
0
18
96
140˚ 10˚
11
42
1400
18
0
98.7
25
˚
65˚
2700
0
236
2447
589
836
222
47
2310
78
2
462
S
L
R
U
T
B4
03± 0
.1
2-R6
12
512
52
50
250
258
16016030
20
383
51±0.0251±0.02
Note: These drawings are for the right-offset model. Contact your Yaskawa representative about drawings for the left-offset model.
22 dia.(8 holes)
B
R2700
25˚
R300
310
125˚
36448.5
35
30
14
46.5
80
3
73 d
ia.
A
70 dia.
14
0 d
ia.
11
6 d
ia.
h7
5.2 dia.(2 holes)(Depth: 10 mm)
12 dia. H7(Depth: 12 mm)
12 ( Dep
th: 1
2 m
m)
+ 0.0
180
95±0.1
Tapped holes M6(6 holes)(Depth: 12 mm)(Pitch: 1.0)

8
Manipulator Specifi cations
Dimensions Units : mm : P-point Maximum Envelope
EPX2800REPX2800
Note: SI units are used for specifi cations.
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
*4 : Including parts mounted in the wrist
H- t
yp
e W
rist Allowable
Moment*2
R -axis (wrist roll) 77.4 N·m (7.9 kgf·m) 45.8 N·m (4.67 kgf·m)
B -axis (wrist pitch/yaw) 49.9 N·m (5.1 kgf·m) 33.8 N·m (3.45 kgf·m)
T -axis (wrist twist) 19.6 N·m (2.0 kgf·m) 10.8 N·m (1.1 kgf·m)
Allowable Inertia(GD2/4)
R -axis (wrist roll) 2.45 kg·m2 1.45 kg·m2
B -axis (wrist pitch/yaw) 1.20 kg·m2 0.79 kg·m2
T -axis (wrist twist) 0.20 kg·m2 0.10 kg·m2
Mass 650 kg 820 kg
Ambient Conditions
Temperature 0 to +40˚C 0 to +40˚C (FM standard: 0 to +45˚C)
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Floor-mounted Shelf-m ounted
Max Weight of Painting Devices on Arm 50 kg*4 25 kg*4
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed),FM (Certifi ed),ATEX (Pending)
Model MOTOMAN-EPX2800 MOTOMAN-EPX2800R
Type YR-EPX2800-*0** YR-EPX2800R-*0*0
Controlled Axis 6 (Vertically articulated)
Payload 20 kg 15 kg
Repeatability*1 ±0.5 mm
Range of Motion
S -axis (turning) −150˚ − +150˚ −120˚ − +120˚
L -axis (lower arm) −45˚ − +120˚
−40˚ − +180˚ (S-axis −90˚ − +90˚)
−40˚ − +120˚ (S-axis +90˚ − +120˚)
−40˚ − +120˚ (S-axis −90˚ − −120˚)
U -axis (upper arm) −85˚ − +90˚ −70˚ − +90˚
R -axis (wrist roll) −360˚ − +360˚
B -axis (wrist pitch/yaw) −360˚ − +360˚
T -axis (wrist twist) −360˚ − +360˚
Maximum Speed
S -axis (turning) 2.7 rad/s, 150˚/s
L -axis (lower arm) 2.1 rad/s, 120˚/s
U -axis (upper arm) 2.7 rad/s, 155˚/s
R -axis (wrist roll) 3.1 rad/s, 360˚/s
B -axis (wrist pitch/yaw) 3.1 rad/s, 360˚/s
T -axis (wrist twist) 3.1 rad/s, 360˚/s
MOTOMAN-EPX2800/2800RLarge painting robot, 20-kg/15-kg payload
View A
View B View C
No interference with workpieces, because hoses for painting devices can be routed
inside the hollow, slim arm. Ideal for painting interior panels of automobiles.
The response of painting devices can be enhanced by solenoid valves and
electropneumatic regulators inside the pressurized enclosure. *: Inner diameter 70 mm
Lineup includes fl oor-mounted and shelf-mounted types!
Hollow slim arm*
P.C.D
.102
21.5±0.1
R675
R282590˚
90˚
377 450 950 270
2766
2017
652
390
0
381
583
98.7
1985
180
2825
1187
58
0
45
00
975
1267
14
008
17
.5
251
60˚
40˚ 90˚
90˚
20˚
670
437233
S
L
R
U
T
B
P-point
S
L
RU T
B
684
959
1157
2439
2778
281
1729 0
1073
227
795.5
701
1467
3324
2351
491469
1258
0
3046
422
98
.7
P-point
795
.59
50
30
014
5
21
90
.5
1550 180250330
120˚
45˚
160˚
135˚
R2778
R1021
R519
392 378
335335
150˚
150˚
A
A
B
C
Tapped holes M6 (6 holes)(Depth: 12 mm) (Pitch: 1.0)
5.2 dia. H7(2 holes) (Depth: 10 mm)
140
dia
.
116
dia
. h7
70 dia.
425
12
5477
618 12 dia. H7
+0.018012
elongated holes(Width: 22 mm)
13.5 dia.(15 holes)
Tapped hole M8(1 hole) (Pitch: 1.25)
17.5 dia.(12 holes)
285 285
290
12 dia. H7
12 elongated holes(Width: 22 mm)
+0.0180

9
Dimensions Units : mm : P-point Maximum Envelope
Manipulator Specifi cations
Note: SI units are used for specifi cations.
Model MOTOMAN-EPX2900
Type YR-EPX2900-*0**Controlled Axis 6 (Vertically articulated)
Payload 20 kg
Repeatability*1 ±0.5 mm
Range of Motion
S -axis (turning) −150˚ − +150˚
L -axis (lower arm) −50˚ − +110˚
U -axis (upper arm) −70˚ − +90˚
R -axis (wrist roll) −360˚ − +360˚
B -axis (wrist pitch/yaw) −360˚ − +360˚
T -axis (wrist twist) −360˚ − +360˚
Maximum Speed
S -axis (turning) 2.7 rad/s, 155˚/s
L -axis (lower arm) 2.2 rad/s, 125˚/s
U -axis (upper arm) 2.7 rad/s, 155˚/s
R -axis (wrist roll) 7.9 rad/s, 450˚/s
B -axis (wrist pitch/yaw) 9.6 rad/s, 550˚/s
T -axis (wrist twist) 11.3 rad/s, 650˚/s
MOTOMAN-EPX2900Large painting robot, 20-kg payload
View A
View B
View C
*1 : Conforms to JIS B 8432.
*2 : Gravitational units are shown in parentheses.
*3 : Varies in accordance with applications and motion patterns.
*: Inner diameter 70 mm
Optimum for painting large-size workpieces such as car bodies.
Color change valves (CCV) and the gear pump are mounted on the arm. Fine control
of painting is available, by solenoid valves and electropneumatic regulators inside the
pressurized enclosure.
Large robot for painting large workpieces with greater effi ciency and quality!
Hollow arm (Hollow process arm)*
H- t
ype
Wris
t
Allowable Moment*2
R -axis (wrist roll) 72.0N·m (7.3 kgf·m)
B -axis (wrist pitch/yaw) 51.5N·m (5.2 kgf·m)
T -axis (wrist twist) 19.6N·m (2.0 kgf·m)
Mass 1030 kg
Ambient Conditions
Temperature 0 to +45˚C
Humidity 20 to 80%RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Power Requirements*3 max. 5.0 kVA
Installation Floor-mounted
Max Weight of Painting Devices on Arm 50 kg including parts mounted in the wrist
Type of Explosion-proofCombination of pressurized (fia2G4) and intrinsic safety (ia2G4).
Explosion Proof Certifi cation TIIS (Certifi ed),FM (Certifi ed),ATEX (Certifi ed)
B
A
C
29
01200
750
380±0.1380±0.1
180
223223
80 210
100
550
98
.7
498
20
50˚50˚
110˚
20˚
30˚
300 1400
492470
0
27
43
14
28
35
5
01692 2900793696657
P-point
0
(from the S-Axis rotation center)
R1000 (Protection hose range)*
U
L
S
R
T
B
* : Protection hose interference range is different according to customer’s condition.
160±0.1
34
0± 0
.1
21
0± 0
.1
25
02
50
20050 370±0.2
20050
310±0.15
00
33
5670 3
35
300
300
60
20
30
50
169
P.C.D
.102
51 51 21.5±0.1R2900
300˚
R550
R793
3350
2921
2421
1043
750
410
1060
560
139
Tapped holes M6 (6 holes)(Depth: 12 mm) (Pitch: 1.0)
14
0 d
ia.
116
dia.
h7
5.2 dia. H7 (2 holes)(Depth: 10 mm)
Tapped holes M8 (4 holes)(Depth: 13 mm) (Pitch: 1.25)
22 dia.(6 holes)
12 dia. H7(2 holes)
70 dia
10
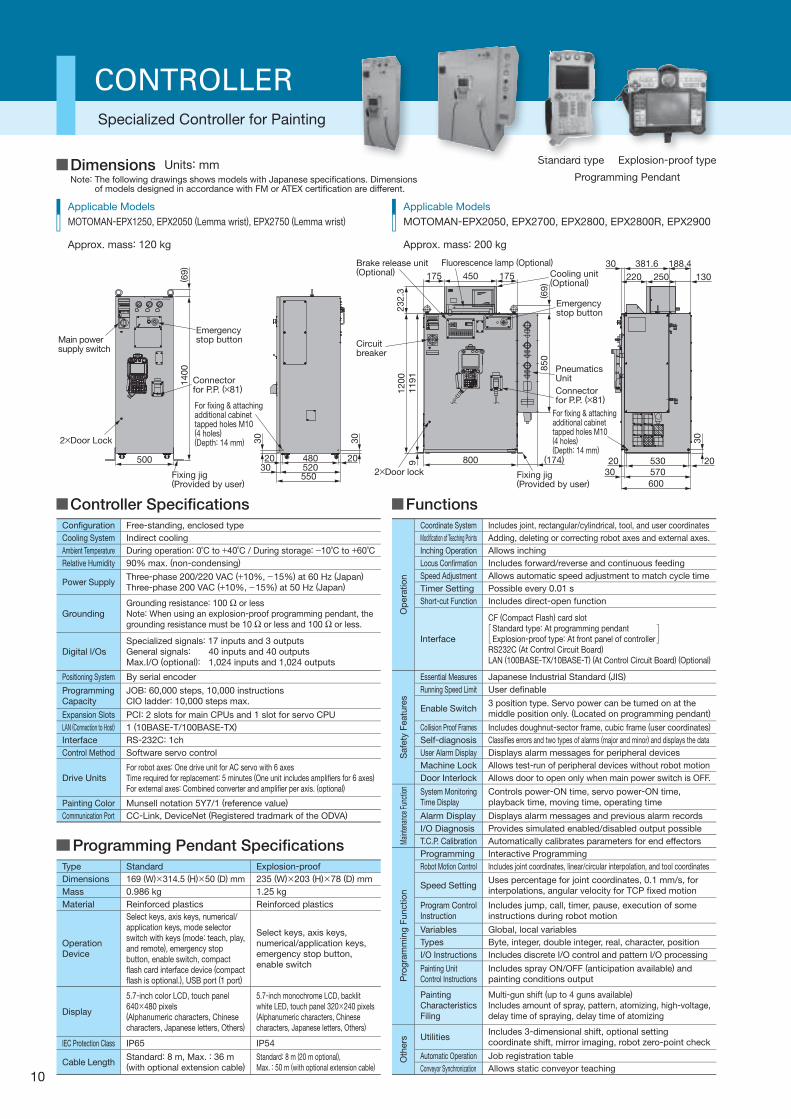
CONTROLLERSpecialized Controller for Painting
Dimensions Units: mm
Controller Specifi cations
Programming Pendant Specifi cations
FunctionsConfi guration Free-standing, enclosed type
Cooling System Indirect cooling
Ambient Temperature During operation: 0˚C to +40˚C / During storage: −10˚C to +60˚C
Relative Humidity 90% max. (non-condensing)
Power SupplyThree-phase 200/220 VAC (+10%, −15%) at 60 Hz (Japan)
Three-phase 200 VAC (+10%, −15%) at 50 Hz (Japan)
GroundingGrounding resistance: 100 Ω or lessNote: When using an explosion-proof programming pendant, the grounding resistance must be 10 Ω or less and 100 Ω or less.
Digital l/OsSpecialized signals: 17 inputs and 3 outputsGeneral signals: 40 inputs and 40 outputsMax.I/O (optional): 1,024 inputs and 1,024 outputs
Positioning System By serial encoder
ProgrammingCapacity
JOB: 60,000 steps, 10,000 instructionsCIO ladder: 10,000 steps max.
Expansion Slots PCI: 2 slots for main CPUs and 1 slot for servo CPU
LAN (Connection to Host) 1 (10BASE-T/100BASE-TX)
Interface RS-232C: 1ch
Control Method Software servo control
Drive UnitsFor robot axes: One drive unit for AC servo with 6 axesTime required for replacement: 5 minutes (One unit includes amplifi ers for 6 axes)
For external axes: Combined converter and amplifi er per axis. (optional)
Painting Color Munsell notation 5Y7/1 (reference value)
Communication Port CC-Link, DeviceNet (Registered tradmark of the ODVA)
Op
era
tio
n
Coordinate System Includes joint, rectangular/cylindrical, tool, and user coordinates
Modifi cation of Teaching Points Adding, deleting or correcting robot axes and external axes.
Inching Operation Allows inching
Locus Confi rmation Includes forward/reverse and continuous feeding
Speed Adjustment Allows automatic speed adjustment to match cycle time
Timer Setting Possible every 0.01 s
Short-cut Function Includes direct-open function
Interface
CF (Compact Flash) card slot Standard type: At programming pendant Explosion-proof type: At front panel of controllerRS232C (At Control Circuit Board)
LAN (100BASE-TX/10BASE-T) (At Control Circuit Board) (Optional)
Safe
ty F
eatu
res
Essential Measures Japanese Industrial Standard (JIS)
Running Speed Limit User defi nable
Enable Switch3 position type. Servo power can be tumed on at the middle position only. (Located on programming pendant)
Collision Proof Frames Includes doughnut-sector frame, cubic frame (user coordinates)
Self-diagnosis Classifi es errors and two types of alarms (major and minor) and displays the data
User Alarm Display Displays alarm messages for peripheral devices
Machine Lock Allows test-run of peripheral devices without robot motion
Door Interlock Allows door to open only when main power switch is OFF.
Mai
nten
ance
Fun
ctio
n
System MonitoringTime Display
Controls power-ON time, servo power-ON time,playback time, moving time, operating time
Alarm Display Displays alarm messages and previous alarm records
I/O Diagnosis Provides simulated enabled/disabled output possible
T.C.P. Calibration Automatically calibrates parameters for end effectors
Pro
gra
mm
ing
Functio
n
Programming Interactive Programming
Robot Motion Control Includes joint coordinates, linear/circular interpolation, and tool coordinates
Speed SettingUses percentage for joint coordinates, 0.1 mm/s, for interpolations, angular velocity for TCP fi xed motion
Program ControlInstruction
Includes jump, call, timer, pause, execution of some instructions during robot motion
Variables Global, local variables
Types Byte, integer, double integer, real, character, position
I/O Instructions Includes discrete I/O control and pattern I/O processing
Painting UnitControl Instructions
Includes spray ON/OFF (anticipation available) andpainting conditions output
Painting Characteristics Filing
Multi-gun shift (up to 4 guns available)
Includes amount of spray, pattern, atomizing, high-voltage,delay time of spraying, delay time of atomizing
Oth
ers Utilities
Includes 3-dimensional shift, optional setting coordinate shift, mirror imaging, robot zero-point check
Automatic Operation Job registration table
Conveyor Synchronization Allows static conveyor teaching
Applicable Models
MOTOMAN-EPX2050, EPX2700, EPX2800, EPX2800R, EPX2900
Applicable Models
MOTOMAN-EPX1250, EPX2050 (Lemma wrist), EPX2750 (Lemma wrist)
Type Standard Explosion-proof
Dimensions 169 (W)×314.5 (H)×50 (D) mm 235 (W)×203 (H)×78 (D) mm
Mass 0.986 kg 1.25 kg
Material Reinforced plastics Reinforced plastics
Operation Device
Select keys, axis keys, numerical/application keys, mode selector switch with keys (mode: teach, play, and remote), emergency stop button, enable switch, compact fl ash card interface device (compact fl ash is optional.), USB port (1 port)
Select keys, axis keys, numerical/application keys, emergency stop button, enable switch
Display
5.7-inch color LCD, touch panel640×480 pixels(Alphanumeric characters, Chinese characters, Japanese letters, Others)
5.7-inch monochrome LCD, backlit white LED, touch panel 320×240 pixels(Alphanumeric characters, Chinese characters, Japanese letters, Others)
IEC Protection Class IP65 IP54
Cable LengthStandard: 8 m, Max. : 36 m (with optional extension cable)
Standard: 8 m (20 m optional),Max. : 50 m (with optional extension cable)
Standard type Explosion-proof type
Approx. mass: 120 kg Approx. mass: 200 kg
Programming Pendant
WARNING
91191
1200
(174)800
381.630
53020 2057030
600
( 69
)8
50
Circuitbreaker
Brake release unit(Optional)
PneumaticsUnit
Cooling unit(Optional)
188.4
220 250 130175 450 175
23
2.3
Fluorescence lamp (Optional)
30
Emergencystop button
2×Door lock Fixing jig(Provided by user)
Connectorfor P.P. (×81)
For fixing & attachingadditional cabinettapped holes M10(4 holes)(Depth: 14 mm)
2×Door Lock
20 480 2030 520
550
500
1400
( 69
)
Emergency stop button
Connectorfor P.P. (×81)
Fixing jig(Provided by user)
30
30
Main powersupply switch
For fixing & attachingadditional cabinettapped holes M10(4 holes)(Depth: 14 mm)
危 険
Note: The following drawings shows models with Japanese specifi cations. Dimensions of models designed in accordance with FM or ATEX certifi cation are different.
St d d t

11
MOTOFEEDERSpecial Workpiece Feader
MOTOFEEDER Standard Specifi cations MOTOFEEDER Lineup
EPX1250: Mounted; table pitch: 1,600 mm
EPX1250: Mounted; table pitch: 1,800 mm(See the dimensional drawing on this page.)
EPX1250: Not mounted; table pitch: 1,400 mm
EPX1250: Not mounted; table pitch: 1,600 mm
EPX1250: Not mounted; table pitch: 1,800 mm
EPX2050-A300: Not mounted; table pitch: 1,400 mm
EPX2050-A300: Not mounted; table pitch: 1,600 mm
EPX2050-A300: Not mounted; table pitch: 1,800 mm
Items Specifi cations
Number of Axis 2
Control Method AC servo drive control
Explosion-proof Structure Pressurized enclosure (fi a2G4) + intrinsic safety (ia2G4)
Max WeightTable for heavy loads: 40 kg
Table for high-speed rotation: 20 kg
Repeatability ±0.55 mm, when table R is 300 mm.
Motion RangeArm: −180°to +180°Table: Continuous rotation
Max Speed
Arm: 120˚ /s
Table for heavy loads: 270˚ /s
Table for high-speed rotation: 900˚ /s
Allowable Moment Table: 452 N·m (46.1 kgf·m)
Allowable Moment of Inertia (GD2/4)
Table for heavy loads: 49.6 kg·m2
Table for high-speed rotation: 1.54 kg·m2
Mass 420 kg
AmbientConditions
Temperature 0 ℃ to + 40℃Humidity 20 % to 80% RH (non-condensing)
Vibration 4.9 m/s2 or less
Others Free from excessive electrical noise (plasma)
Air Panel (Optional) Analog control for both one or two guns
Others Continuous rotation or indexed positioning
Dimensions Units : mm : P-point Maximum Envelope
Note: Contact your Yaskawa representative for more information.
View A and B
With a robot mounted on a MOTOFEEDER used for small workpieces
(Max: 800 mm × 800 mm), a smaller space is required.
Both indexed positioning and spindle rotations are possible.
Air panels for painting devices are available (optional).
EPX1250
900 900
1800
620
200
82
08
0
31
0
960
65
0
200
520 86.5
606.5
19
.2
2944
235435
235
235
30
53
05
560
700
280480
760
(532)350
Drive for arm rotation
Drive for table rotation
460±0.05
27
0± 0
.05
260±0.05
12 dia. H7(2 positioning pin holes)
Tapped holes M10(2×6 holes)(Depth: 18 mm)
10 dia. H7 (4 holes)(Depth: 18 mm)
86
Arm
Table
P-point
58
5.6
( 80
0)
(800)(Max. workpiece size)
( 20
0)
22.5°
30°
P.C.D
.125
P.C.D
.180
220
dia
.
40 dia. H7
(Depth: 6 mm)
20
0± 0
.05
30°
R900 R56
6
22dia.
(4 mounting holes )
A B

MOTOMAN-EPX Series
LITERATURE NO. KAEP C940420 05A
Published in Japan May 2012 12-5Specifications are subject to change without notice for ongoing product modifications and improvements.
© 2012 YASKAWA ELECTRIC CORPORATION. All rights reserved.
YASKAWA ELECTRIC CORPORATION
In the event that the end user of this product is to be the military and said product is to be employed in any weapons systems or the manufacture thereof, the export will fall under the relevant regulations as stipulated in the Foreign Exchange and Foreign Trade Regulations. Therefore, be sure to follow all procedures and submit all relevant documentation according to any and all rules, regulations and laws that may apply.
Sales Department
12-1-29
HEAD OFFICE2-1 Kurosaki-Shiroishi, Yahatanishi-ku, Kitakyushu, Fukuoka 806-0004, JapanPhone: +81-93-645-7745 Fax: +81-93-645-7746
YASKAWA America, Inc.100 Automation Way, Miamisburg, OH 45342, U.S.A.Phone: +1-937-847-6200 Fax: +1-937-847-6277
YASKAWA Europe GmbHKammerfeldstr. 1, 80591 Allershausen, GermanyPhone: +49-8166-90-0 Fax: +49-8166-90-103
YASKAWA Nordic ABBredbandet 1vån. 3 varvsholmen 392 30 Kalmar, SwedenPhone: +46-480-417-800 Fax: +46-480-417-999
YASKAWA Electric (China) Co., Ltd.12F, Carlton Bldg., No.21 HuangHe Road, HuangPu District, Shanghai 200003, ChinaPhone: +86-21-5385-2200 Fax: +86-21-5385-3299
YASKAWA SHOUGANG ROBOT CO., LTD.No.7 Yongchang North Road, Beijing E&T Development Area China 100176Phone: +86-10-6788-2858 Fax: +86-10-6788-2878
YASKAWA Robotics India Limited#426, Udyog Vihar Phase-IV, Gurgaon, Haryana, IndiaPhone: +91-124-475-8500 Fax: +91-124-475-8542
YASKAWA Electric Korea Co., Ltd9F, Kyobo Securities Bldg., 26-4, Yeouido-dong, Yeongdeungpo-gu, Seoul 150-737, KoreaPhone: +82-2-784-7844 Fax: +82-2-784-8495
YASKAWA Electric (Singapore) PTE Ltd151 Lorong Chuan, #04-02A New Tech Park, Singapore 556741Phone: +65-6282-3003 Fax: +65-6289-3003
YASKAWA Electric (Thailand) Co. Ltd.252/246, 4th Floor Muang Thai-Phatra Office Tower Rachadapisek Road,Huaykwang Bangkok, 10320 ThailandPhone: +66-2-693-2200 Fax: +66-2-693-4200