Motoman SK45
57
MOTOMAN ROBOTICS AB a subsidiary of YASKAWA Electric Corporation Service manual, Robot MOTOMAN-SK45 /-SK45-30
-
Upload
saul-eduardo-renteria -
Category
Documents
-
view
557 -
download
61
description
Service manual, Robot. Include the principal characteristics about this industrial robot.
Transcript of Motoman SK45

MOTOMAN ROBOTICS ABa subsidiary of YASKAWA Electric Corporation
Service manual, Robot
MOTOMAN-SK45 /-SK45-30

Service manual SK45/ SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45IH.FM
Page: 1
MOTOMANROBOTICSAB
1. About this manual .................................. 32. Machine description ............................... 3
Technical data 3Identification 3Working area - radial range 4Alterable working envelope 4
3. Precautions for allowable wrist load ....... 5Allowable wrist load 5Allowable U-load 6
4. Lifting instruction .................................... 7Handling of the robot 7Shipping bolts and jigs 8
5. Mounting ................................................ 9General 9Safety 9Robot placed on a common base 9Robot mounted directly on the floor 10Connection to wrist flange 11
6. Connection ........................................... 11General 11Connection customer application 12ConnectionYASNAC MRC 12
7. Construction ......................................... 13Limit switch 13Internal connectors 13
8. Remodelling SK45 to SK45-30 ............ 15Disassmble 15Assembly 16Surfaces to seal 17Finishing 17
9. Maintenance ........................................ 18General 18Inspection schedule 18Replacement procedures for battery unit 19S-axis speed reducer 20Speed reducer L-axis 21Speed reducer U-axis 22Speed reducer R-axis 23B- and T-axes speed reducers 24L-axis cross roller bearing 25Link arms for L- and U-axes 26
10. Spare parts .......................................... 2711. Specification ......................................... 27

Service manual SK45/ SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45IH.FM
Page: 2
MOTOMANROBOTICS
AB
Revision
980914MOTOMAN Spareparts no. added for bearings.(Book-format for framemaker documents).

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 3About this manual
MOTOMANROBOTICSAB
MOTOMAN SK45 / SK45-30Electric Industrial Robot YR-SK45-C000, YR-SK45-C001
YR-SK45-D000, YR-SK45-D001European version of English manual TOE-C945-185B.
1. About this manualYaskawa’s electric industrial robot consist of robot Motoman-SK45 /-SK45-30 and controller YASNAC MRC.The working station can be completed with external axis, tools,fixtures, other machins, safety guards etc.
This manual gives instruction about:-Technical specification-Installation-Maintenance
For the control system YASNAC MRC, see separate instruction.Instruction for handling of robot and sourrounding equipment, see separate instruction.
This servicemanual must not be copied without our written permission and the content thereof must not be imparted to a third party nor be used for any unauthorized purpose. Contravention will be prosecuted.
2. Machine description
2.1 Technical dataFor technical data, see separate table in the end of this manual.
2.2 IdentificationThe robot MOTOMAN-SK45 /-SK45-30 as well as the controller YASNAC MRC are provided with machine signs where the robot-number is stated, check that these signs has the same number. If not, contact Motoman Robotics AB.This check is very important if more than one robot will be installed at the same time.The designations of the different axis are general for MOTOMAN-robots and are found in maintenance schedule, spare part list and instruction.

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 4 Machine description
MOTOMANROBOTICS
AB
2.3 Working area - radial rangeFor description of working area and dimensions, see separate drawing.
MOTOMAN-SK45 drawing No. HW9180849.MOTOMAN-SK45-30 drawing No. HW9180865.
2.4 Alterable working envelopeThe working envelopes of S-axis can be altered according to the operation conditions. If alteration is necessary, contact Motoman Robotics AB.
AxesWorking range Note1
(limitations)
1. If limitations of the S-axis working area is necessary, contact Motoman Robotics AB.
max. min.
S-axis +180° -180° ±180°, ±150°, ±120°, ±90°, ±60°, ±30°
L-axis +150° -90°
U-axis +145° -120° For SK45-30, +145° / -110°
R-axis +350° -350°
B-axis +125° -125°
T-axis +350° -350°
Fig.1 Name on the robot axes
T+
T-
B+
B-
R+
R-
U+
U-
L+
L-
S+
S-
Rotary head S
Lower arm L
Upper arm U
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 5Precautions for allowable wrist load
MOTOMANROBOTICSAB
3. Precautions for allowable wrist load
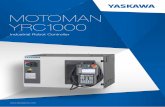
3.1 Allowable wrist loadThe maximum allowable wrist load for the MOTOMAN-SK45/SK45-30 including brackets, tools and handling article. The following wrist load are allowable.
Following picture shows mounting limits (LB and LT) for the wrists unit, with respective of the total inertia. Total inertia is valid at maximum moment. For other circumstances, for example just moment or just inertia other values can be allowed, contact Motoman Robotics AB.
YR-SK45
Axis Moment Nm Total intertia kg x m2
R 176,4 Nm 10,8 kg x m²
B 176,4 Nm 10,8 kg x m²
T 98 Nm 5 kg x m²
YR-SK45-30
Axis Moment Nm Total intertia kg x m2
R 176,4 Nm 10,8 kg x m²
B 176,4 Nm 10,8 kg x m²
T 98 Nm 5 kg x m²
Fig.2 Allowable inertia to SK45 for wrist unit (B-axis).
T- and R-axis rotationcenter line

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 6 Precautions for allowable wrist load
MOTOMANROBOTICS
AB
3.2 Allowable U-loadThe tapped holes on the top of the U-arm are adapted to attachment of equipment to the robot, see picture.Max. load on the U-axis (W1 incl. W2) = 45 kg for SK45.Max. load on the U-axis (W1 incl. W2) = 30kg for SK45-30.Max. load on the U-axis (W3) = 10 kg (max. 49 Nm)1.Max. load on the S-axis (W4) = 30kg².
1. For ceiling mounted robot max. 5 kg (max. 49 Nm) are allowed on W3.
Fig.3 Allowable inertia to SK45-30 for wrist unit (B-axis).
T- and R-axis rotationcenter line
Fig.4 Allowable load on robotarm.
W2W3
W1
W4
W3 = place for valve or similar.W4 = place for serviceunit or similar.
W2 = place for valve or similar.
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 7Lifting instruction
MOTOMANROBOTICSAB
4. Lifting instruction
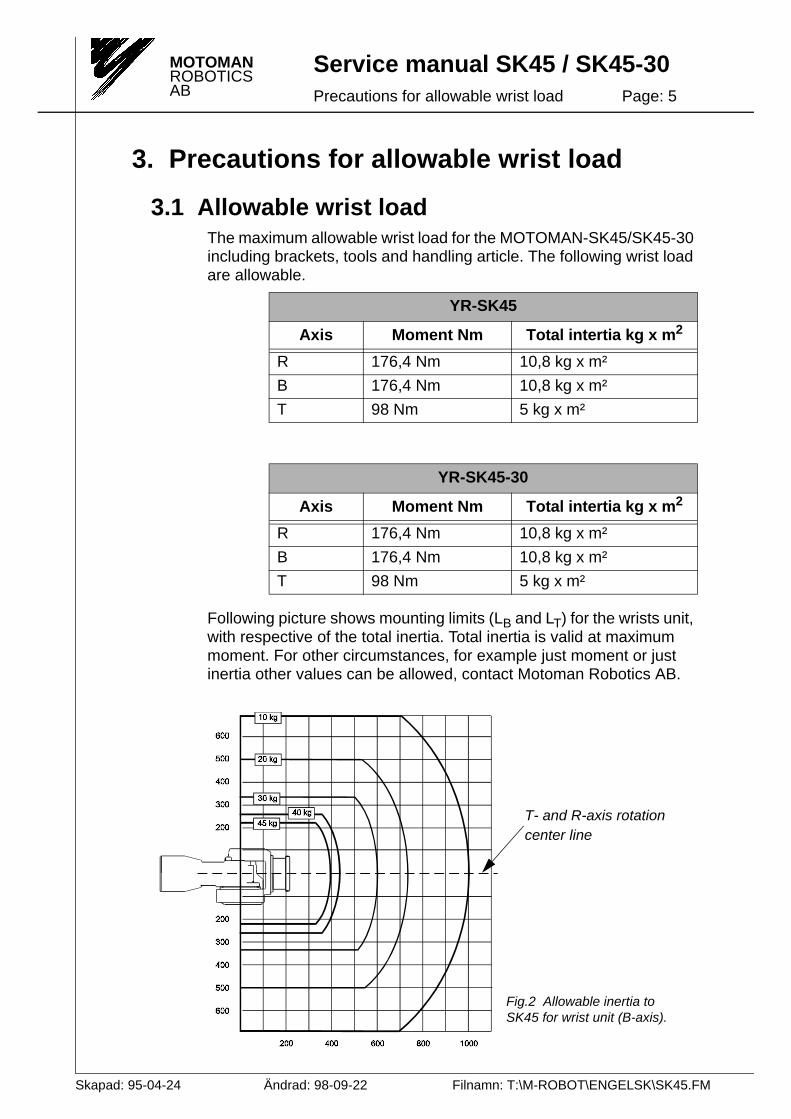
4.1 Handling of the robotThe MOTOMAN-SK45 robot should be lifted using straps threaded through attached eyebolts, see figure. The weight of the MOTOMAN-SK45 robot is without any equipment about 600 kg (including the shipping bolts and jigs).Avoid expose motors, arms and links to force from the straps.Attached eyebolts are designed to support the robot weight!
Avoide expose the equipment to strong vibration or bumps during handling.
Note!Crane operation, sling application, and forklift truck operation should be performed only by licenced personnel. In handling the positioner, extra care must be taken regarding the following:- Never place any part of your body under a suspended load or move a suspended load over any part of another person’s body. Careless handling may result in servere personal injury or death.
If the robot should be moved on a pallet using a forklift, the robot should be attached by shipping bolts. Be sure that the pallet is of good quality.The straps shall be certificated for at least 1000 kg.
Fig.5 Lifting instructions for MOTOMAN-SK45
Eyeboltsare supplied

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 8 Lifting instruction
MOTOMANROBOTICS
AB
4.2 Shipping bolts and jigsThe MOTOMAN-SK45 is provided with shipping bolts and jigs to protect the robot from movements and forces during shipment. The jigs are yellow.
Note!Before turning on the power, check to be sure that the shipping bolts and jigs have been removed.Save these shipping bolts and jigs for furture use in the event of moving or carrying the robot..
Pos. Detail Dimension
A Bolt / clamp M6 x 4
B Bolt / clamp M10 x 4
C Bolt / clamp M10 x 4
D Eyebolts M20 x 2
E Rubberplate
F Mounting bolts M20 x 4
Fig.6 Position of shipping bolts and jigs
A
BC
D
E
F
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 9Mounting
MOTOMANROBOTICSAB
5. Mounting
5.1 GeneralThe robot can be delivered in three different performance: floor-, wall- and ceiling mounting.For mounting the robot should be mounted with four M20 hexagon socket head cap bolts with tensile strenght of 1200N/mm². The tightening torque should be 210 Nm.
For wall-mounted types, S-axis working range is restricted to ±30°.
For wall- and ceiling-mounted types, it is necessary to insure that the mounting can support the weight of the manipulator.
Since installation environment has an effect on the positioning accuracy and the life of robot, the robot should be installed under the following prace.-0°C to +45°C (ambient temperature).-Free from corrosive gases or liquid, or explosive gases.-Free from excessive vibration (less than 0,5g).-Free from large electrical noise (plasma).
5.2 SafetyThe MOTOMAN-SK45 should be firmly mounted on a baseplate or foun-dation strong enough to support the robot and withstand repulsion force during acceleration and deceleration. See also chapter 2.3.
✔ Install the safety guards before operating the machin.✔ Don’t start the robot without it is firmly mounted on the floor.✔ Install the robot in a place where the robot with full arm length won’t
reach walls, safety guards or the controller.✔ Don’t install a robot which is damaged or where parts are missing.✔ Check that the shipping bolts and jigs have been removed.
The safety fencing shall fulfill the demands in the EC-directive.
5.3 Robot placed on a common baseThe common base should be in good quality and resistance. The sur-face shall be rugged to increase the friction between robot and base-plate, this to avoid the robot to move during operation. The thickness of the common base should be at least 50 mm. Mount the baseplate to the floor with M20-anchor bolt.

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 10 Mounting
MOTOMANROBOTICS
AB
5.4 Robot mounted directly on the floorThe floor has to be strong enough to support the robot and the equipment, see following specification.
5.4.A Where the concrete thickness (floor) is 200 mm or more
a) The surface of the floor should be level and even. If it is uneven, grind the swell and flatten the surface.
b) Check for cracks on the floor. If any cracks are found, remove the material around the cracks and rebuild the floor with concrete. Place the robot by fastening the plate with M20 anchor bolts. The plate is tapped for M16 bolts.
5.4.B Where the concrete thickness (floor) is less than 200 mm
a) Dig a footing in the floor area.
b) Spread stone in the excavated area and tamp them sufficiently to make a solid stone bed.
c) Fill the empty space of the stone bed with grout, and lay the concrete foundation. It should be more than 200 mm thick, and the surface must be level and even.
d) The concrete should be cured for more than a week before installing the robot.
Fig.7 Mounting on a baseplate.
Bolt M20 x 70Spring washerWasherBase
Baseplate
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 11Connection
MOTOMANROBOTICSAB
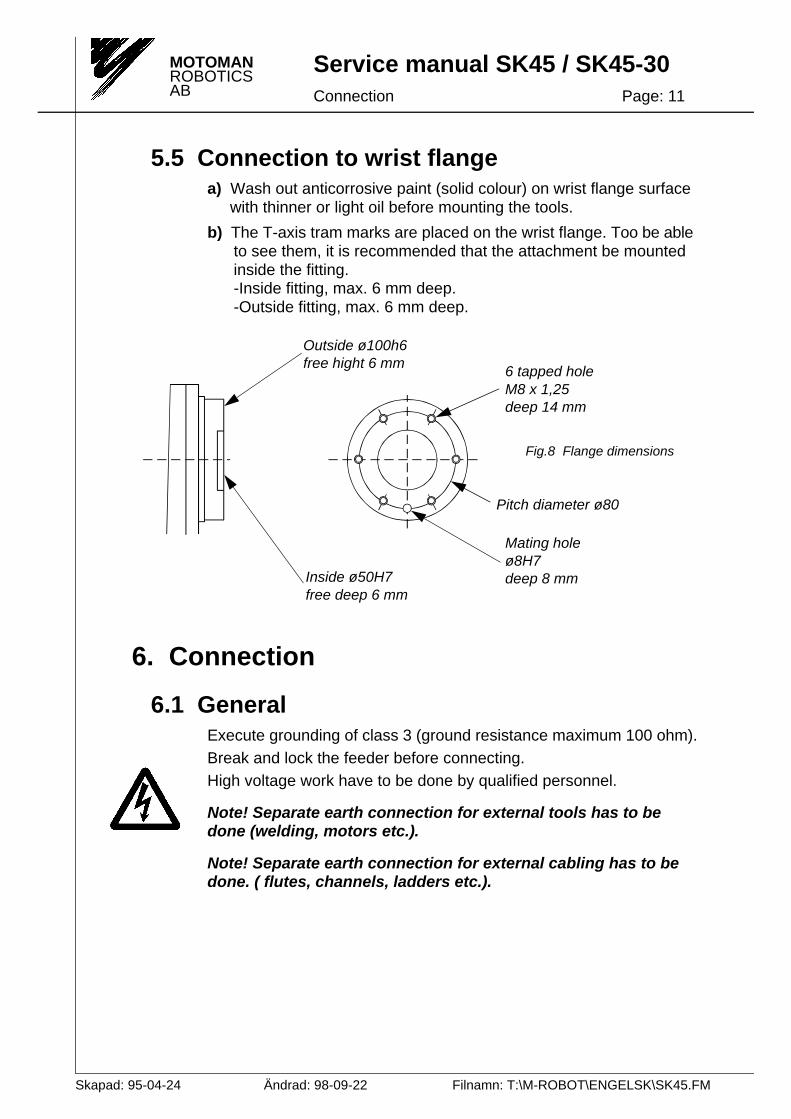
5.5 Connection to wrist flangea) Wash out anticorrosive paint (solid colour) on wrist flange surface
with thinner or light oil before mounting the tools.
b) The T-axis tram marks are placed on the wrist flange. Too be able to see them, it is recommended that the attachment be mounted inside the fitting. -Inside fitting, max. 6 mm deep.-Outside fitting, max. 6 mm deep.
6. Connection
6.1 GeneralExecute grounding of class 3 (ground resistance maximum 100 ohm).Break and lock the feeder before connecting.High voltage work have to be done by qualified personnel.
Note! Separate earth connection for external tools has to be done (welding, motors etc.).
Note! Separate earth connection for external cabling has to be done. ( flutes, channels, ladders etc.).
Fig.8 Flange dimensions
6 tapped holeM8 x 1,25deep 14 mm
Mating holeø8H7deep 8 mm
Pitch diameter ø80
Outside ø100h6
Inside ø50H7free deep 6 mm
free hight 6 mm
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 12 Connection
MOTOMANROBOTICS
AB
6.2 Connection customer applicationa) Allowable cables and pressure pipes for customer application.
3BC = Customer application.Power limit for internal cables: cable 1-23 = 0,75 mm², max. 6,6A / cable, the sum for cables 1-23 < 60A.
b) Pressure limit for air: max. 0,49 MPa (5 kg/cm²).
c) Connection specification according to the table.
6.3 ConnectionYASNAC MRCa) Ground MOTOMAN-SK45 min. 5,5 mm²
On the robot there are two connector to connection the YASNAC MRC.1BC = Signal cable to the absolute encorder, drawingno: 341975-xx.2BC = Power cable to the servo motors, drawingno: 341976-xx.
b) The connection on the robot and the cable are both marked.Insert the cable and fasten the retaining nut.
c) Voltage feed MRC, see MRC service manual.
d) Grounding MRC. Use third class grounding (resistance between chassi and earth max 100 ohm). Grounding control system MRC min. 8 mm².
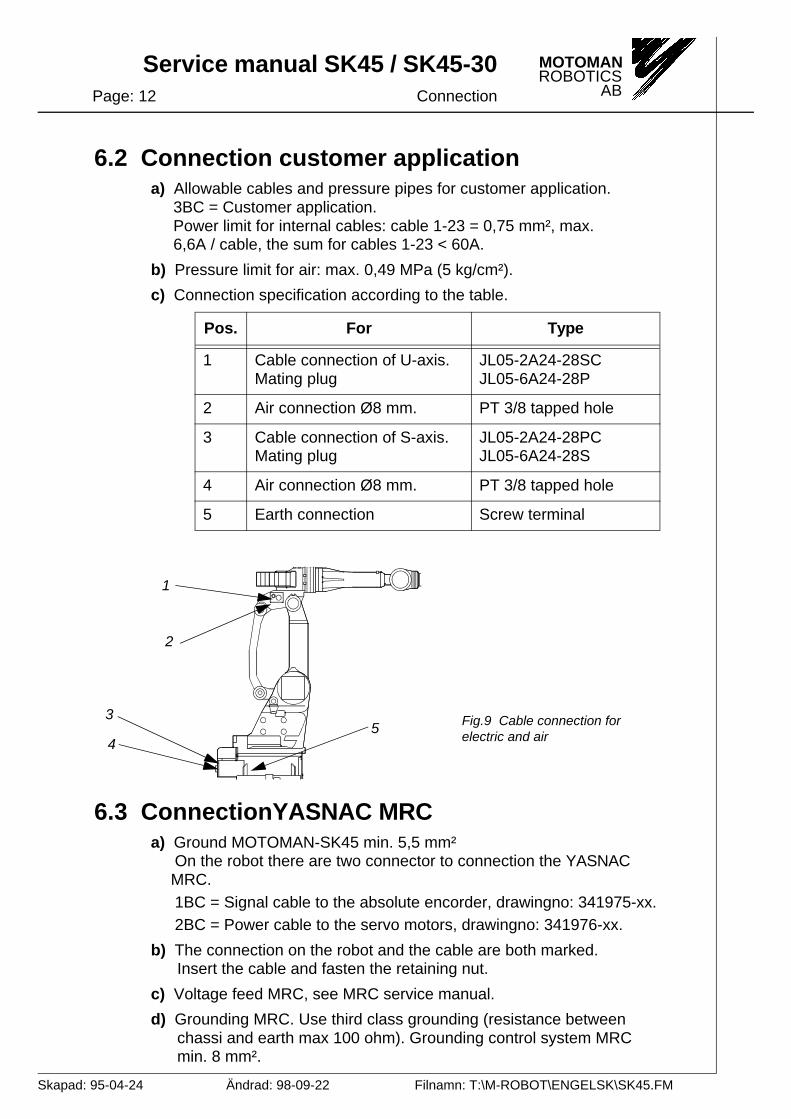
Pos. For Type
1 Cable connection of U-axis.Mating plug
JL05-2A24-28SCJL05-6A24-28P
2 Air connection Ø8 mm. PT 3/8 tapped hole
3 Cable connection of S-axis.Mating plug
JL05-2A24-28PCJL05-6A24-28S
4 Air connection Ø8 mm. PT 3/8 tapped hole
5 Earth connection Screw terminal
Fig.9 Cable connection for electric and air
1
2
3
45
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 13Construction
MOTOMANROBOTICSAB
7. Construction
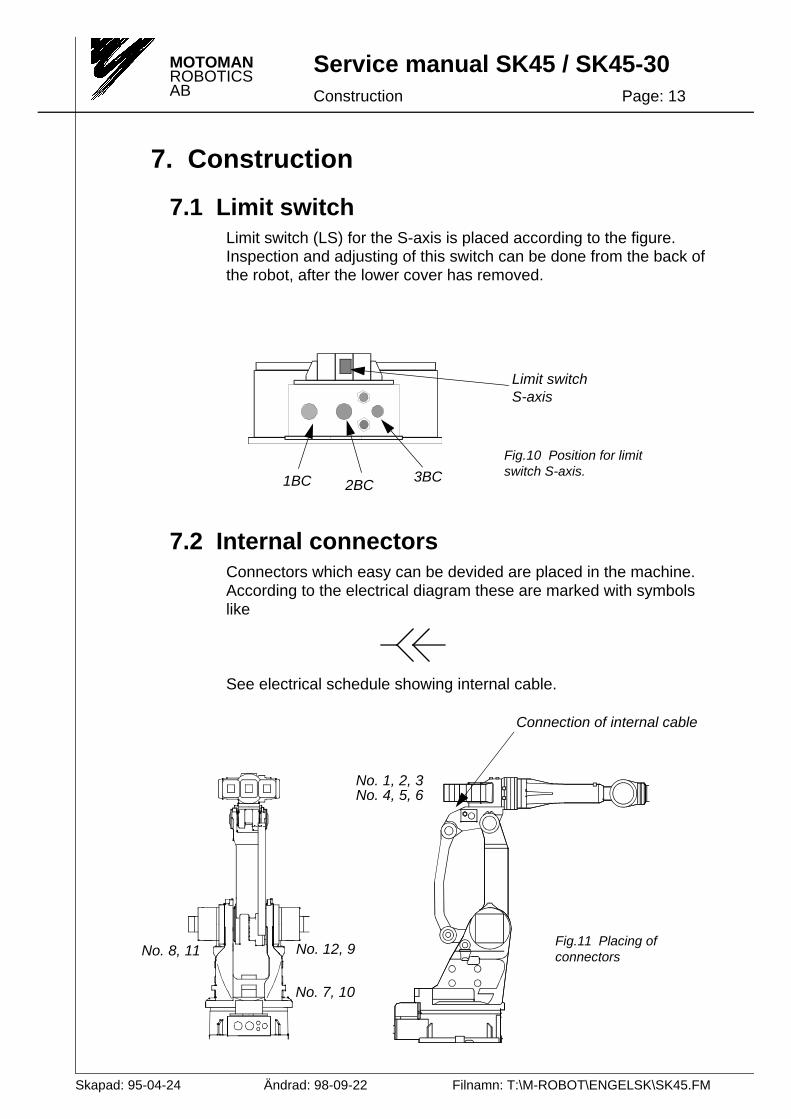
7.1 Limit switchLimit switch (LS) for the S-axis is placed according to the figure. Inspection and adjusting of this switch can be done from the back of the robot, after the lower cover has removed.
7.2 Internal connectorsConnectors which easy can be devided are placed in the machine. According to the electrical diagram these are marked with symbols like
See electrical schedule showing internal cable.
Fig.10 Position for limit switch S-axis.
Limit switchS-axis
1BC 2BC3BC
Fig.11 Placing of connectors
Connection of internal cable
No. 1, 2, 3No. 4, 5, 6
No. 7, 10
No. 8, 11 No. 12, 9
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 14 Construction
MOTOMANROBOTICS
AB
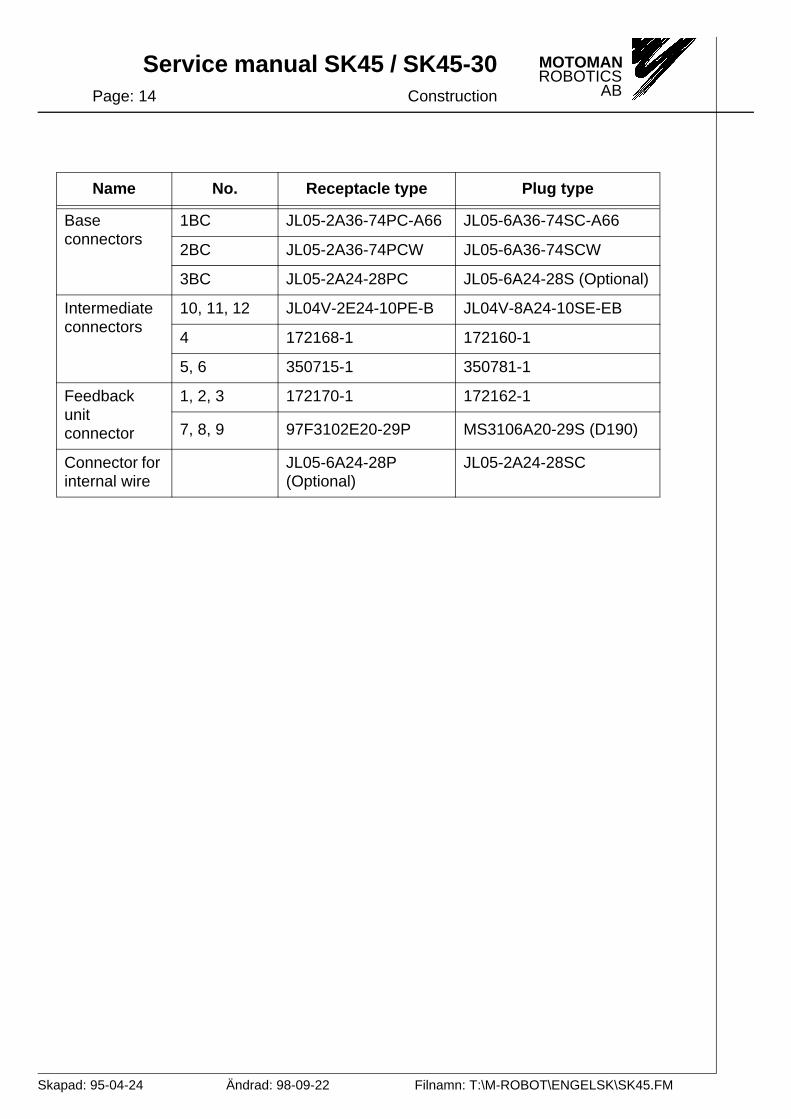
Name No. Receptacle type Plug type
Base connectors
1BC JL05-2A36-74PC-A66 JL05-6A36-74SC-A66
2BC JL05-2A36-74PCW JL05-6A36-74SCW
3BC JL05-2A24-28PC JL05-6A24-28S (Optional)
Intermediate connectors
10, 11, 12 JL04V-2E24-10PE-B JL04V-8A24-10SE-EB
4 172168-1 172160-1
5, 6 350715-1 350781-1
Feedback unit connector
1, 2, 3 172170-1 172162-1
7, 8, 9 97F3102E20-29P MS3106A20-29S (D190)
Connector for internal wire
JL05-6A24-28P (Optional)
JL05-2A24-28SC
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 15Remodelling SK45 to SK45-30
MOTOMANROBOTICSAB
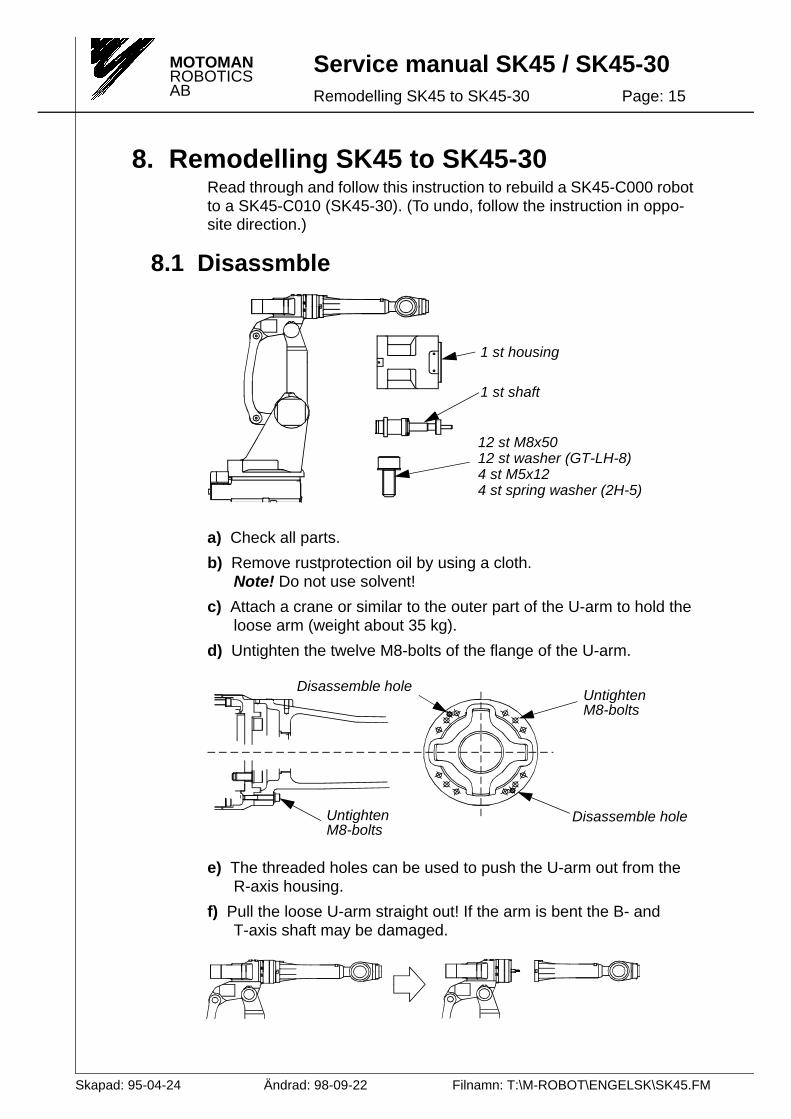
8. Remodelling SK45 to SK45-30Read through and follow this instruction to rebuild a SK45-C000 robot to a SK45-C010 (SK45-30). (To undo, follow the instruction in oppo-site direction.)
8.1 Disassmble
a) Check all parts.
b) Remove rustprotection oil by using a cloth. Note! Do not use solvent!
c) Attach a crane or similar to the outer part of the U-arm to hold the loose arm (weight about 35 kg).
d) Untighten the twelve M8-bolts of the flange of the U-arm.
e) The threaded holes can be used to push the U-arm out from the R-axis housing.
f) Pull the loose U-arm straight out! If the arm is bent the B- and T-axis shaft may be damaged.
1 st housing
1 st shaft
12 st M8x5012 st washer (GT-LH-8)4 st M5x124 st spring washer (2H-5)
UntightenM8-bolts
Disassemble hole
Disassemble hole
Untighten M8-bolts

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 16 Remodelling SK45 to SK45-30
MOTOMANROBOTICS
AB
8.2 Assemblya) Check that the extension shaft fit in the R-axis housing.
b) Lubricate the spline part of the extension shaft, use ALVANIA EP2.
c) Attach the extension shaft to the loose U-arm. Use the M5-bolts and the spring washers. Tightening torque shall be 7,5 Nm (0.75 kgfm).
d) Remove all old sealant from the flange of the loose U-arm.
e) Apply new sealant, type 1211.
f) Attach the extension housing to the loose U-arm.Note! position of the housing! Use the twelve new M8x50-bolts and the washers. Tightening torque shall be 25 Nm (2,5 kgfm).
g) Remove all old sealant from the flange of the R-axis housing.
h) Apply new sealant, type 1211.
i) Attach the extended U-arm to the R-axis housing. Keep the loose U-arm in a straight line with the R-axis housing to avoid damages on the internal axis.Note! position of the housing! Use the twelve old M8x50-bolts and washers.Tightening torque shall be 25 Nm (2,5 kgfm).
4 st M5x124 st Spring washers
Splines
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 17Remodelling SK45 to SK45-30
MOTOMANROBOTICSAB
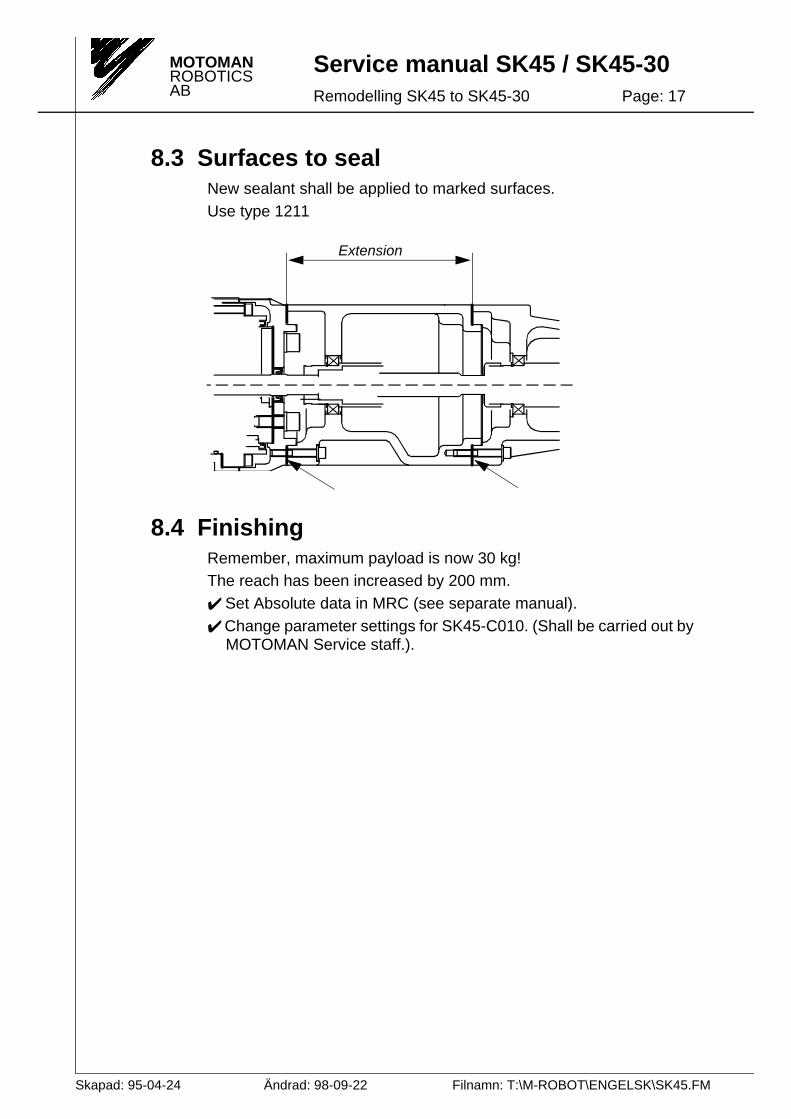
8.3 Surfaces to sealNew sealant shall be applied to marked surfaces.Use type 1211
8.4 FinishingRemember, maximum payload is now 30 kg!The reach has been increased by 200 mm.✔ Set Absolute data in MRC (see separate manual).✔ Change parameter settings for SK45-C010. (Shall be carried out by
MOTOMAN Service staff.).
Extension
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 18 Maintenance
MOTOMANROBOTICS
AB
9. Maintenance
9.1 GeneralBefore maintenance or inspection, make sure to turn the primary power supply OFF. Maintenance and inspection must be performed by speci-fied personnel.For disassembly or repair, contact MOTOMAN-service.
9.2 Inspection scheduleOverhaul inspections are classified into three types:-Periodical (daily, every 1.000H and 6.000H)-Primary (12.000H)-Secondary (24.000H)
Maintenance schedule is devided in time interval. Follow the schedule, proper inspections are essential not only to assure that the mechanism will be able to function for a long period, but also to prevent malfunctions and assure safe operation.
The inspection interval is based on the servo power ON time.
For axes which are used very frequently (in handling application, etc.) it is recommended that inspections are constructed at approximately one-half of the normal schedules.
See separate schedule in this documentation!

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 19Maintenance
MOTOMANROBOTICSAB
9.3 Replacement procedures for battery unitIf the battery charge becomes too low or is depleted, replace it according to the following procedures.
a) When changing battery unit the power must be ON between YASNAC MRC and MOTOMAN-SK45.
b) Remove the side cover (U-axis motor side) of rotary bed.
c) Remove the battery unit mounting screw (M4).
d) Remove the pins on the both sides of battery.
e) Remove the old battery and mount the new battery. Be sure to insert the pins in correct direction.
Fig.12 Change of batteryBattery
Cover

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 20 Maintenance
MOTOMANROBOTICS
AB
9.4 S-axis speed reducer
9.4.A Grease replenishmenta) Be sure to remove SO exhaust plug. (If the grease is added with
exhaust plug in place, the grease will infiltrate into the motor).
b) Inject grease into SI grease inlet by using a grease gun.
c) Move the S-axis for 30 minutes to discharge the extra grease.
d) Wipe SO exhaust port with a cloth and reinstall the plug.
9.4.B Grease replacementa) Be sure to remove SO exhaust plug. (If the grease is added with
exhaust plug in place, the grease will infiltrate into the motor).
b) Inject grease into SI grease inlet by using a grease gun.
c) The grease replacement is completed when new grease appears from SO exhaust port. The new grease is distinguished from old grease by colour.
d) Move the S-axis for 30 minutes to discharge the extra grease.
e) Wipe SO exhaust port with a cloth and reinstall the plug.
Note!If the robot will be mounted upside down, the in- and outlet nipples should change places.
S-axis Qua. Grease
Replenishment (first time) 1400 cc Molywhite RE No. 00
Replenishment 700 cc Molywhite RE No. 00
Replacement ca 3400 cc Molywhite RE No. 00
Fig.13 Speed reducer to S-axis.Note! In ceiling mounted the in- and outlet will be inverted.
Grease - inletnipple A-PT1/8
Grease - outletnipple A-PT1/8
Speed reducer

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 21Maintenance
MOTOMANROBOTICSAB
9.5 Speed reducer L-axis
9.5.A Grease replenishmenta) Move the L-axis to upright position.
b) Be sure to remove LO, (If grease is added with exhaust plugs in place, the grease will infiltrate into the motor).
c) Inject grease into LI, grease inlets by using a grease gun.
d) Move L-axis for 30 minutes to discharge the extra grease.
e) Wipe LO and LI exhaust ports with a cloth and reinstall the plugs.
9.5.B Grease replacementa) Move the L-axis to upright position.
b) Be sure to remove LO exhaust plugs. (If grease is added with exhaust plugs in place, the grease will infiltrate into the motor).
c) Inject grease into LI grease inlets by using a grease gun.
d) The grease replacement is completed when new grease appears from exhaust ports. The new grease is distinguished from old grease by colour.
e) Move L-axis for 30 minutes to discharge the extra grease.
f) Wipe LO and LI exhaust ports with a cloth and reinstall the plugs.
L-axis Qua. Grease
Replenishment (first time) 340 cc Molywhite RE No. 00
Replenishment 170 cc Molywhite RE No. 00
Replacement 850 cc Molywhite RE No. 00
Fig.14 Speed reducer for L-axis.The robot seen from behind. The U-arm in upright position.
LI Inletnipple A-PT1/8
LO Outletmagic plug M6

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 22 Maintenance
MOTOMANROBOTICS
AB
9.6 Speed reducer U-axis
9.6.A Grease replenishmenta) Move the U-axis forward about 60°. Now the inlet nipple is visible
from the backside.
b) Be sure to remove UO, (If grease is added with exhaust plugs in place, the grease will infiltrate into the motor).
c) Inject grease into UI, grease inlets by using a grease gun.
d) Move U-axis for 30 minutes to discharge the extra grease.
e) Wipe UO and UI exhaust ports with a cloth and reinstall the plugs.
9.6.B Grease replacementa) Move the U-axis forward about 60°. Now the inlet nipple is visible
from the backside.
b) Be sure to remove UO, (If grease is added with exhaust plugs in place, the grease will infiltrate into the motor).
c) Inject grease into UI, grease inlets by using a grease gun.
d) The grease replacement is completed when new grease appears from exhaust ports. The new grease is distinguished from old grease by colour.
e) Move U-axis for 30 minutes to discharge the extra grease.
f) Wipe UO and UI exhaust ports with a cloth and reinstall the plugs.
U-axis Qua. Grease
Replenishment (first time) 340 cc Molywhite RE No. 00
Replenishment 170 cc Molywhite RE No. 00
Replacement 850 cc Molywhite RE No. 00
Fig.15 Speed reducer for U-axis.The robot seen from the front.
UI Inletnipple A-PT1/8
UO Outletmagic plug
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 23Maintenance
MOTOMANROBOTICSAB
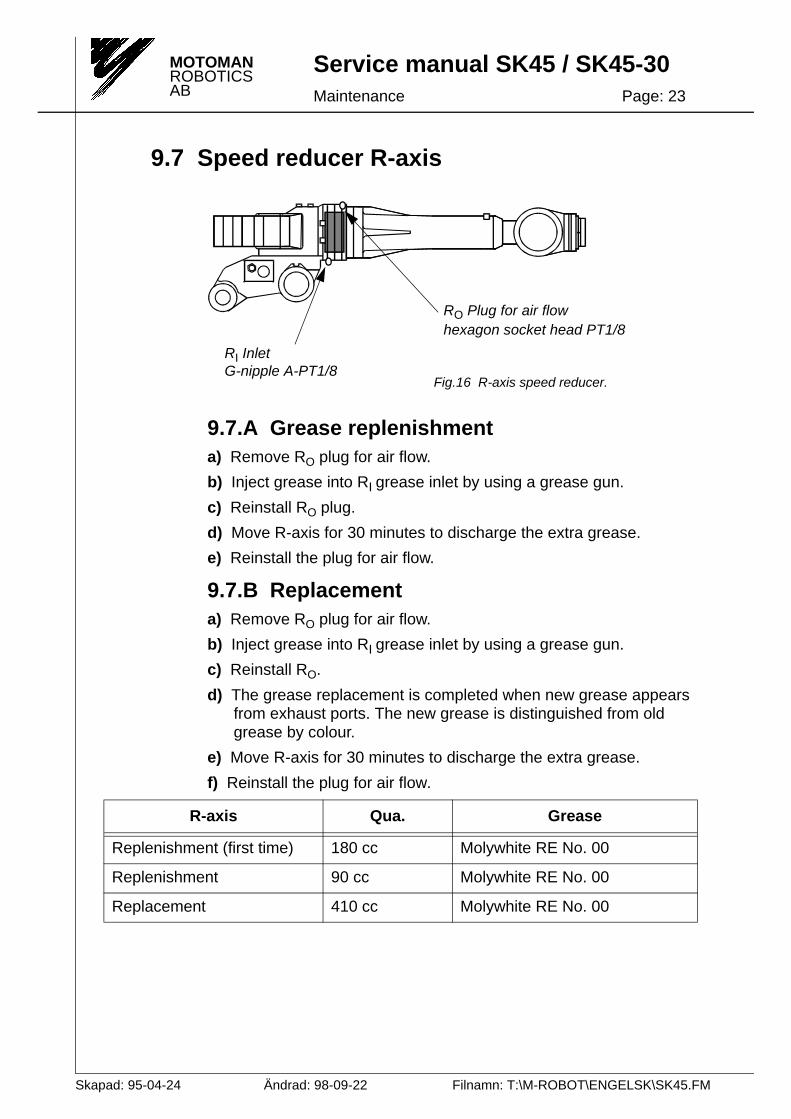
9.7 Speed reducer R-axis
9.7.A Grease replenishmenta) Remove RO plug for air flow.
b) Inject grease into RI grease inlet by using a grease gun.
c) Reinstall RO plug.
d) Move R-axis for 30 minutes to discharge the extra grease.
e) Reinstall the plug for air flow.
9.7.B Replacementa) Remove RO plug for air flow.
b) Inject grease into RI grease inlet by using a grease gun.
c) Reinstall RO.
d) The grease replacement is completed when new grease appears from exhaust ports. The new grease is distinguished from old grease by colour.
e) Move R-axis for 30 minutes to discharge the extra grease.
f) Reinstall the plug for air flow.
R-axis Qua. Grease
Replenishment (first time) 180 cc Molywhite RE No. 00
Replenishment 90 cc Molywhite RE No. 00
Replacement 410 cc Molywhite RE No. 00
RI InletG-nipple A-PT1/8
Fig.16 R-axis speed reducer.
RO Plug for air flowhexagon socket head PT1/8

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 24 Maintenance
MOTOMANROBOTICS
AB
9.8 B- and T-axes speed reducers
9.8.A Replenishmenta) Remove BO plug for air flow (magic screws M6).
b) Inject grease into BI grease inlets by using a grease gun.
c) Wipe BO exhaust ports with a cloth and reinstall the plugs.
9.8.B Replacementa) Remove BO plugs for air flow (magic screws M6).
b) Inject grease into BI grease inlets by using a grease gun.
c) The grease replacement is completed when new grease appears from exhaust ports. The new grease is distinguished from old grease by colour.
d) Wipe BO exhaust ports with a cloth and reinstall the plugs.
B-axis Qua. Grease
Replenishment (first time) B 600 cc Molywhite RE No. 00
Replenishment B 300 cc Molywhite RE No. 00
Replacement B 1500 cc Molywhite RE No. 00
Fig.17 Speed reducer B-axis.
BI Inletnipple A-MT6x1
BO Plug for air flowmagic screw M6
Flange

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 25Maintenance
MOTOMANROBOTICSAB
9.9 L-axis cross roller bearing
9.9.A Replenishmenta) Move the L-arm to upright position or little forward. The nipples are
within reach from the backside.
b) Remove LO plug for air flow (magic screw PT1/8 placed in the back-side of the storage).
c) Inject grease into LI grease inlets by using a grease gun, no overfill protection exist.
d) Wipe LO exhaust ports with a cloth and reinstall the plug.
L-axis cross roller bearing Qua. Grease
Replenishment L 30 cc Alvania EP grease 2
Fig.18 L-axis cross roller bearing.The robot seen from behind.
LI Inletnipple A-PT1/8
LO Plug for air flowhexagon socket head PT1/8
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 26 Maintenance
MOTOMANROBOTICS
AB
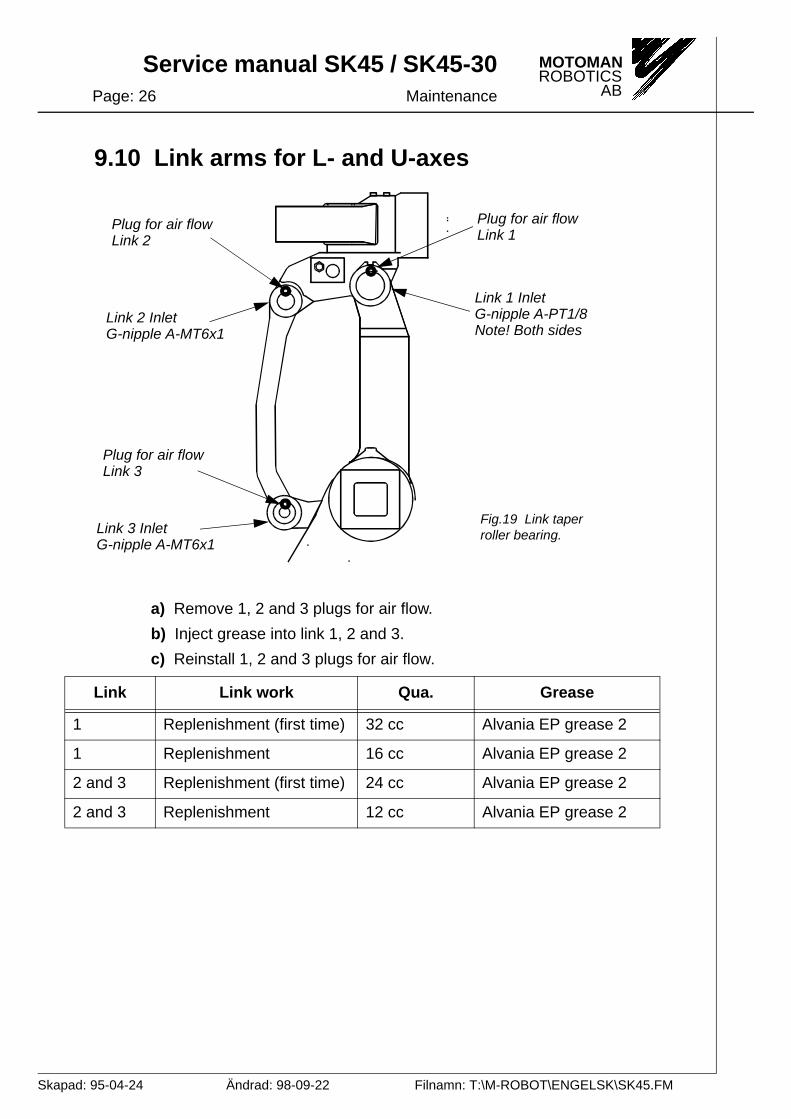
9.10 Link arms for L- and U-axes
a) Remove 1, 2 and 3 plugs for air flow.
b) Inject grease into link 1, 2 and 3.
c) Reinstall 1, 2 and 3 plugs for air flow.
Link Link work Qua. Grease
1 Replenishment (first time) 32 cc Alvania EP grease 2
1 Replenishment 16 cc Alvania EP grease 2
2 and 3 Replenishment (first time) 24 cc Alvania EP grease 2
2 and 3 Replenishment 12 cc Alvania EP grease 2
Fig.19 Link taper roller bearing.
Plug for air flowPlug for air flow
Plug for air flow
Link 1Link 2
Link 3
Link 1 InletG-nipple A-PT1/8Note! Both sides
Link 3 InletG-nipple A-MT6x1
Link 2 InletG-nipple A-MT6x1
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 27Spare parts
MOTOMANROBOTICSAB
10. Spare partsIt is recommended that the following parts and components be kept in stock as spare parts for the MOTOMAN-SK45 robot. The list are ranked in three categories as follows:Rank A: ConsumablesRank B: Parts for which replacement may be necessary as a result
of frequent operation.Rank C: Drive units
See separate list.
Send your spare part order to:Address: MOTOMAN ROBOTICS AB
BOX 504, 385 25 Torsås, Sweden
Telephone: +46 486 488 00Telefax: +46 486 414 10
... or to nearest distributor.
11. Specification-Technical specifications-Spare parts-Service schedule
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45.FM
Page: 28 Specification
MOTOMANROBOTICS
AB

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 29YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 30 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
Pos. No. Part name YEC No. Motoman No.
1001 1 Robot base HW9100779-
1002 1 S-axis base HW9200794-1
1003 1 S-axis head HW9100777-1
1004 1Servo motorSGMD-32AWA-YR11
HW9381136-A 9130720
1005 1 Reducer HW9380736-A 9130710
1006 1 Shaft HW9381161-A
1007 1 Shaft HW9481647-A
1008 1 Shaft HW9381163-A
1009 1 Oils sealing Y426012.5
1010 3 Tube NB-0860
1011 1 Coupling PH8-01
1012 1 Support HW9301730-1
1012AA 2 Bolt M6x16
1012AB 2 Spring washer 2H-6
1012AC 2 Washer M6
1013 1 Support HW9301730-2
1013AA 2 Bolt M6x16
1013AB 2 Spring washer 2H-6
1013AC 2 Washer M6
1014 3 Saddle CD-31
1015 6 Bolt M5x10
1015AA 6 Spring washer 2H-5
1016 4 Bolt M6x14
1016AA 4 Spring washer 2H-6
1017 1 Cover HW9404379-1
1018 6 Bolt M6x12
1020 2 Cover HW9404215-1
1021 4 Bolt M6x12
1023 2 Coupling POC8-01
1024 2 Coupling PMF8-01
1025 2 Greas nipple A-PT1/8
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 31YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
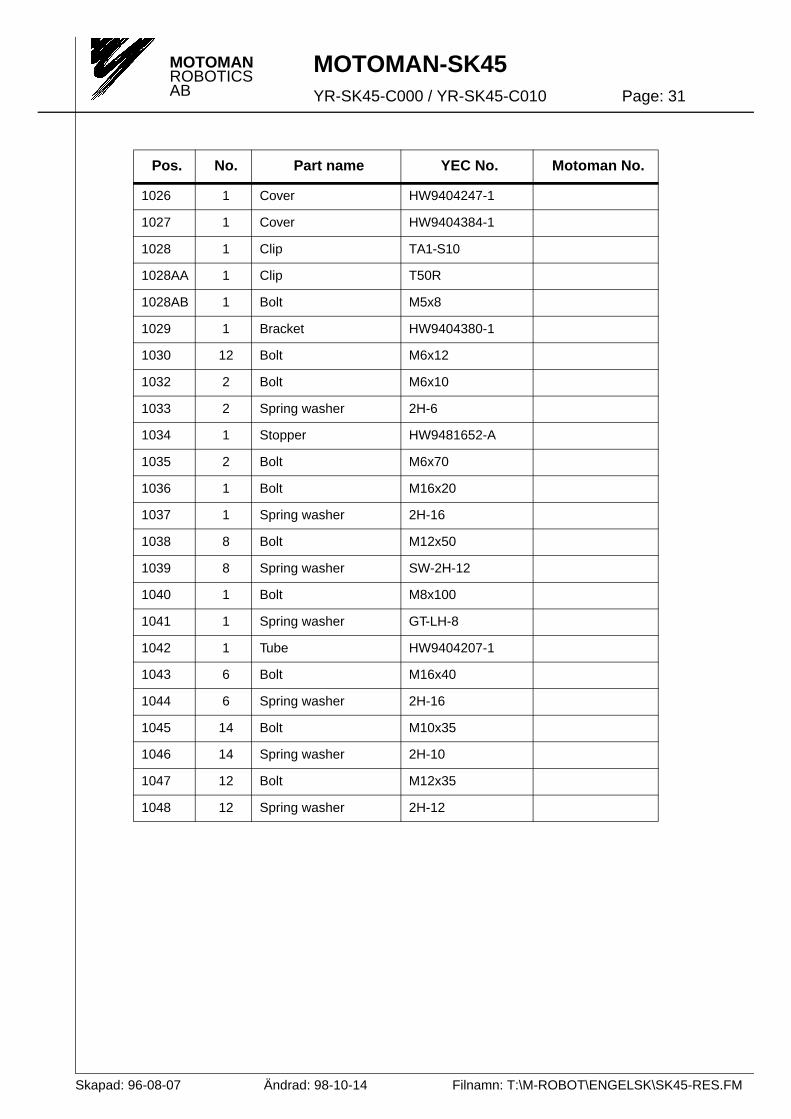
1026 1 Cover HW9404247-1
1027 1 Cover HW9404384-1
1028 1 Clip TA1-S10
1028AA 1 Clip T50R
1028AB 1 Bolt M5x8
1029 1 Bracket HW9404380-1
1030 12 Bolt M6x12
1032 2 Bolt M6x10
1033 2 Spring washer 2H-6
1034 1 Stopper HW9481652-A
1035 2 Bolt M6x70
1036 1 Bolt M16x20
1037 1 Spring washer 2H-16
1038 8 Bolt M12x50
1039 8 Spring washer SW-2H-12
1040 1 Bolt M8x100
1041 1 Spring washer GT-LH-8
1042 1 Tube HW9404207-1
1043 6 Bolt M16x40
1044 6 Spring washer 2H-16
1045 14 Bolt M10x35
1046 14 Spring washer 2H-10
1047 12 Bolt M12x35
1048 12 Spring washer 2H-12
Pos. No. Part name YEC No. Motoman No.
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
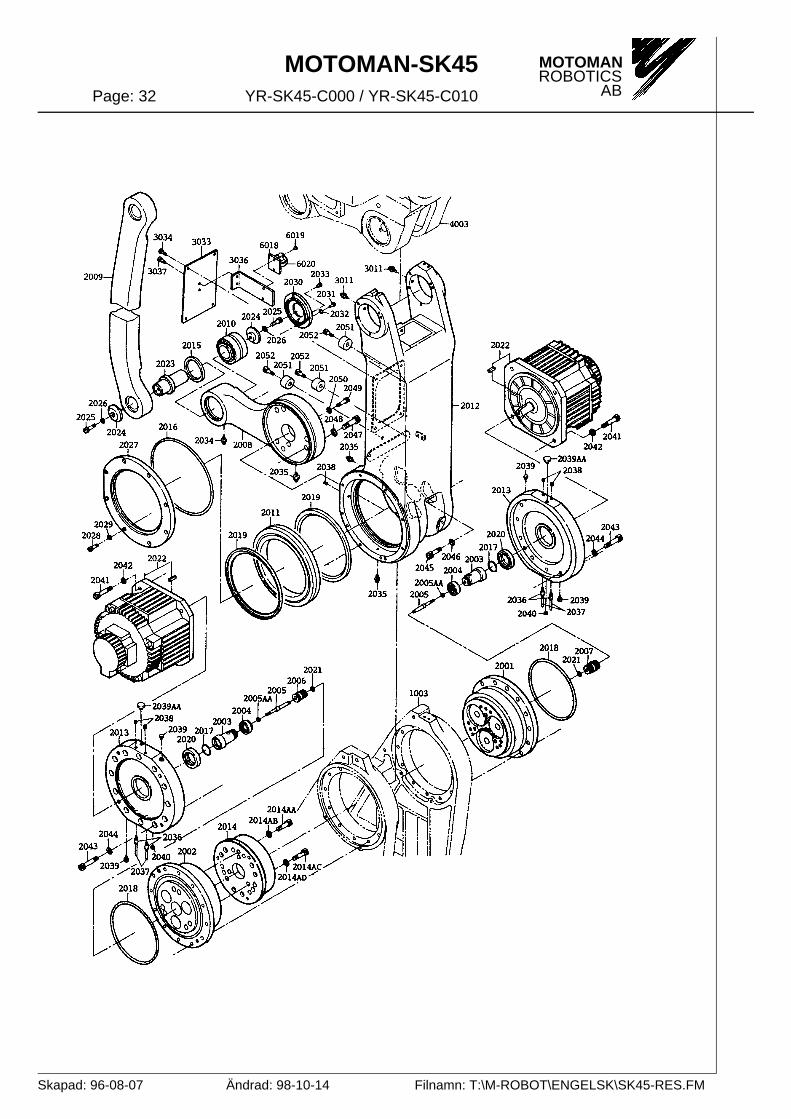
Page: 32 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 33YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
Pos. No. Part name YEC No. Motoman No.
1003 1 S-axis head HW9100777-1
2001 1 Reducer-L HW9380616-A 9130711
2002 1 Reducer-U HW9380616-B 9130712
2003 2 Shaft HW9381152-A
2004 2 Shaft HW9481648-A
2005 2 Bolt HW9481645-A
2005AA 2 Spring washer 2H-6
2006 1 Shaft HW9481649-A
2007 1 Shaft HW9481650-A
2008 1 Link B HW9200793-1
2009 1 Link A HW9200792-1
2010 1 Bearing HW9481646-A 9125120
2011 1 Bearing HW9481320-A 9125121
2012 1 L-arm HW9100780-1
2013 2 Motor base HW9200791-1
2014 1 Shaft HW9200816-1
2014AA 6 Bolt M16x45
2014AB 6 Spring washer 2H-16
2014AC 12 Bolt M12x40
2014AD 12 Spring washer SW-2H-12
2015 1 Oil sealing AG3217A4
2016 1 O-ring S240
2017 2 O-ring S32
2018 2 O-ring G190
2019 2 Oil sealing VC1952207
2020 2 Oil sealing Y426012.5
2021 2 Clip STW-9
2022 2Servo motorSGMD-22AWA-YR13
HW9381137-A 9130721
2023 1 Shaft HW9301654-1
2024 2 Washer HW9404205-1
2025 2 Bolt M10x25

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 34 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
2026 2 Spring washer 2H-10
2027 1 Bearing cover HW9301653-1
2028 8 Bolt M8x20
2029 8 Spring washer 2H-8
2030 1 Bearing cover HW9404361-1
2031 3 Bolt M6x16
2032 3 Spring washer 2H-6
2033 1 Plug LP-M5
2034 1 Grease nipple A-MT6x1
2035 3 Grease nipple A-P1/8
2036 4 Coupling POC6-01M
2037 4 Tube UB-0640-0.1C
2038 5 Plug PT1/8
2039 4 Set screw M6x8
2039AA 2 Air bleeder EZ0094-EO
2040 2 Cup EZ52002AO
2041 8 Bolt M12x40
2042 8 Spring washer 2H-12
2043 24 Bolt M10x50
2044 24 Spring washer 2H-10
2045 12 Bolt M12x35
2046 12 Spring washer SW-2H-12
2047 6 Bolt M16x45
2048 6 Spring washer 2H-16
2049 1 Bolt M8x35
2050 1 Spring washer 2H-8
2051 3 Stopp HW9881688-A
2052 3 Bolt M10x20
3011 2 Grease nipple A-PT1/8
3033 1 Cover HW9404202-1
3034 4 Bolt M6x12
3036 1 Bracket HW9404259-1
Pos. No. Part name YEC No. Motoman No.

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 35YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
3037 2 Bolt M6x12
4003 1 Housing HW9100778-1
6018 1 Clip MB5
6019 2 Bolt M4x8
6020 1 Clip T20S
Pos. No. Part name YEC No. Motoman No.

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 36 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 37YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
Pos. No. Part name YEC No. Motoman No.
3002 2 Bearing HR32012XJ 9117046
3003 1 Bearing HW9481646-A 9125120
3004 2 Oil sealing AG3584AO
3005 2 Bearing cover HW9404383-1
3006 6 Bolt M8x20
3007 6 Spring washer 2H-8
3008 2 Shaft HW9404245-1
3009 8 Bolt M8x60
3010 8 Spring washer 2H-8
3012 3 Plug LP-M5
3013 1 Grease nipple A-MT6x1
3014 1 Bearing cover HW9404361-1
3015 3 Bolt M6x16
3016 3 Spring washer 2H-6
3017 2 Washer HW9404205-1
3018 2 Bolt M10x25
3019 2 Spring washer 2H-10
3020 1 Shaft HW9301654-1
3021 1 Shims HW9404246-1
3022 1 Shims HW9404246-2
3023 1 Shims HW9404246-3
3024 1 Shims HW9404246-4
3025 1 Shims HW9404246-5
3026 1 Shims HW9404246-6
3027 1 Cover HW9404381-1
3028 4 Bolt M6x12
3030 1 Cover HW9404382-1
3031 4 Bolt Mx12
3039 1 Plate HW9404262-1
3039AA 2 Bolt M6x14
3039AB 2 Spring washer 2H-6
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 38 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
3040 1 Saddle CD-31
3040AA 2 Bolt M5x10
3040AB 2 Spring washer 2H-5
3040AC 1 Clip TAI-S10
3040AD 1 Clip T50R
3040AE 1 Bolt M5x8
3041 1 Oil sealing AG3217A4
3042 1 Gasket HW9481087-E
4000 2Servo motorSGMP-15AW-YR11
HW9380768-A 9130620
4001 1Servo motorSGMP-08AW-YR11
HW9380635-A 9130621
4002 1 Reducer HW9280679-A 9130713
4003 1 Housing HW9100778-1
4003AA 2 Bolt M6x8
4003AB 1 Bolt M6x10
4003AC 1 Spring washer 2H-6
4003AD 1 Bolt M5x8
4004 1 Housing HW9200797-1
4005 1 Shaft HW9381147-A
4006 1 Shaft HW9381165-A
4007 3 Ring PLO17X021E
4008 2 O-ring ARP568-258
4009 1 Shaft HW9381146-A
4010 1 Ball bearing 6002DDU*NS7* 9125122
4011 1 Bearing HW9481232-A 9125123
4012 1 Bearing HW9481656-A 9125124
4013 2 Oil sealing AE1314J1
4014 1 Oil sealing AE2651F4
4015 1 Kuggskiva HW9481751-A
4016 1 Coupling HW9381150-A
4017 1 Cog disc HW9481654-A
4018 1 Cog disc HW9481655-A
Pos. No. Part name YEC No. Motoman No.
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 39YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
4019 1 Cog disc HW9381164-A
4020 1 Cog belt 250S5M525
4021 1 Cog belt 250S5M475
4022 1 Housing HW9200815-1
4023 6 Bolt M14x30
4024 6 Washer GT-SH-M14
4025 16 Bolt M8x70
4026 16 Spring washer 2H-8
4027 1 Plug PT1/8
4028 12 Bolt M8x50
4029 12 Spring washer GT-LH-8
4030 3 Bolt M5x30
4031 3 Spring washer 2H-5
4032 1 Shaft HW9404359-1
4032AA 8 Bolt M4x20
4032AB 8 Spring washer 2H-4
4033 1 Grease nipple A-PT1/8
4034 1 Bearing cover HW9404221-1
4035 3 Bolt M4x12
4036 3 Spring washer 2H-4
4037 1 Clip WR25
4038 1 Washer HW9404218-1
4039 1 Bolt M6x20
4040 1 Spring washer 2H-6
4041 2 Cup EZ2228AO
4042 2 Cup EZ5013AO
4043 1 Cup EZ2228AO
4044 1 Sleeve HW9404219-1
4045 4 Bolt M4x12
4046 4 Spring washer 2H-4
4047 1 Sleeve HW9404224-1
4048 1 Sleeve HW9404224-2
Pos. No. Part name YEC No. Motoman No.
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 40 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
4049 1 Bearing cover HW9404221-1
4050 3 Bolt M4x12
4051 3 Spring washer 2H-4
4052 1 Sleeve HW9404224-3
4053 1 Sleeve HW9404224-4
4054 8 Sleeve HW9404231-1
4055 8 Bolt M6x30
4056 8 Spring washer 2H-6
4056AA 4 Bolt M8x30
4056AB 4 Spring washer 2H-8
4057 1 Bearing nut HW9404227-1
4058 2 Bolt M5x7
4059 1 Housing HW9404226-1
4060 3 Bolt M4x25
4061 3 Spring washer 2H-4
4062 1 Clip IRTW-32
4063 2 Clip ISTW-15
4064 1 Sleeve HW9404217-1
6034 1 Coupling KQE12-03
6074 2 Bolt M4x16
6075 2 Nut M4
Pos. No. Part name YEC No. Motoman No.
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 41YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 42 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
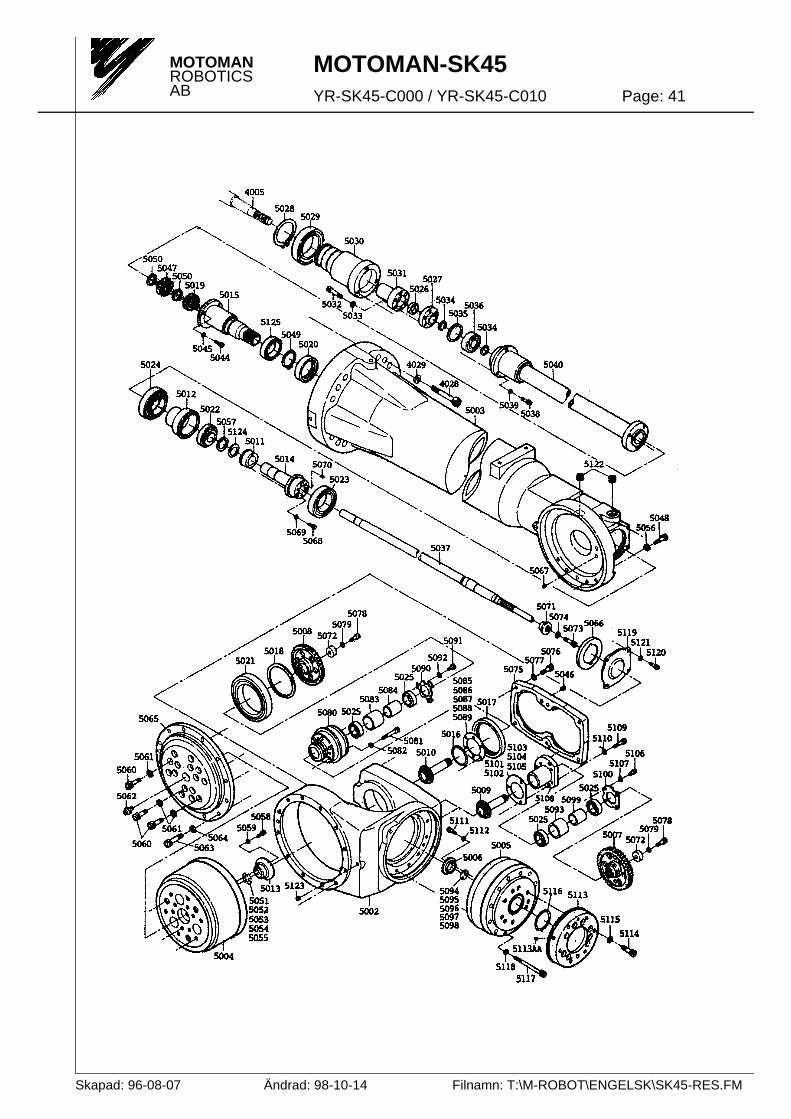
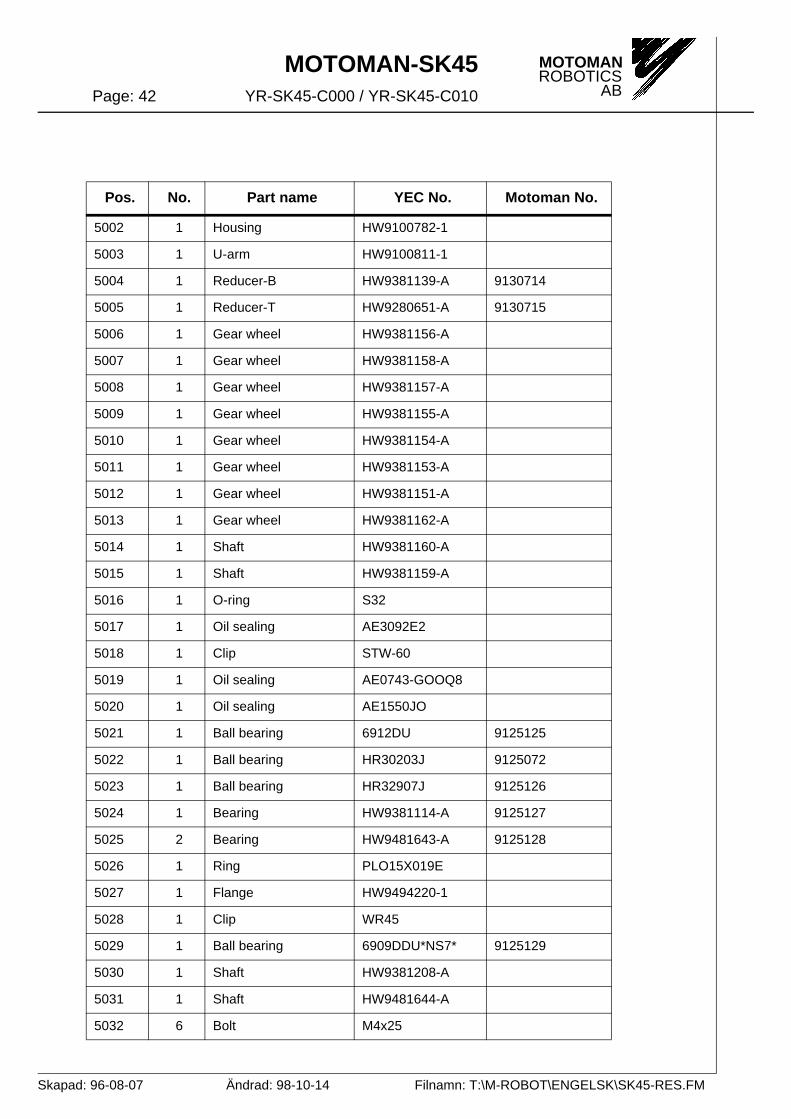
Pos. No. Part name YEC No. Motoman No.
5002 1 Housing HW9100782-1
5003 1 U-arm HW9100811-1
5004 1 Reducer-B HW9381139-A 9130714
5005 1 Reducer-T HW9280651-A 9130715
5006 1 Gear wheel HW9381156-A
5007 1 Gear wheel HW9381158-A
5008 1 Gear wheel HW9381157-A
5009 1 Gear wheel HW9381155-A
5010 1 Gear wheel HW9381154-A
5011 1 Gear wheel HW9381153-A
5012 1 Gear wheel HW9381151-A
5013 1 Gear wheel HW9381162-A
5014 1 Shaft HW9381160-A
5015 1 Shaft HW9381159-A
5016 1 O-ring S32
5017 1 Oil sealing AE3092E2
5018 1 Clip STW-60
5019 1 Oil sealing AE0743-GOOQ8
5020 1 Oil sealing AE1550JO
5021 1 Ball bearing 6912DU 9125125
5022 1 Ball bearing HR30203J 9125072
5023 1 Ball bearing HR32907J 9125126
5024 1 Bearing HW9381114-A 9125127
5025 2 Bearing HW9481643-A 9125128
5026 1 Ring PLO15X019E
5027 1 Flange HW9494220-1
5028 1 Clip WR45
5029 1 Ball bearing 6909DDU*NS7* 9125129
5030 1 Shaft HW9381208-A
5031 1 Shaft HW9481644-A
5032 6 Bolt M4x25
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
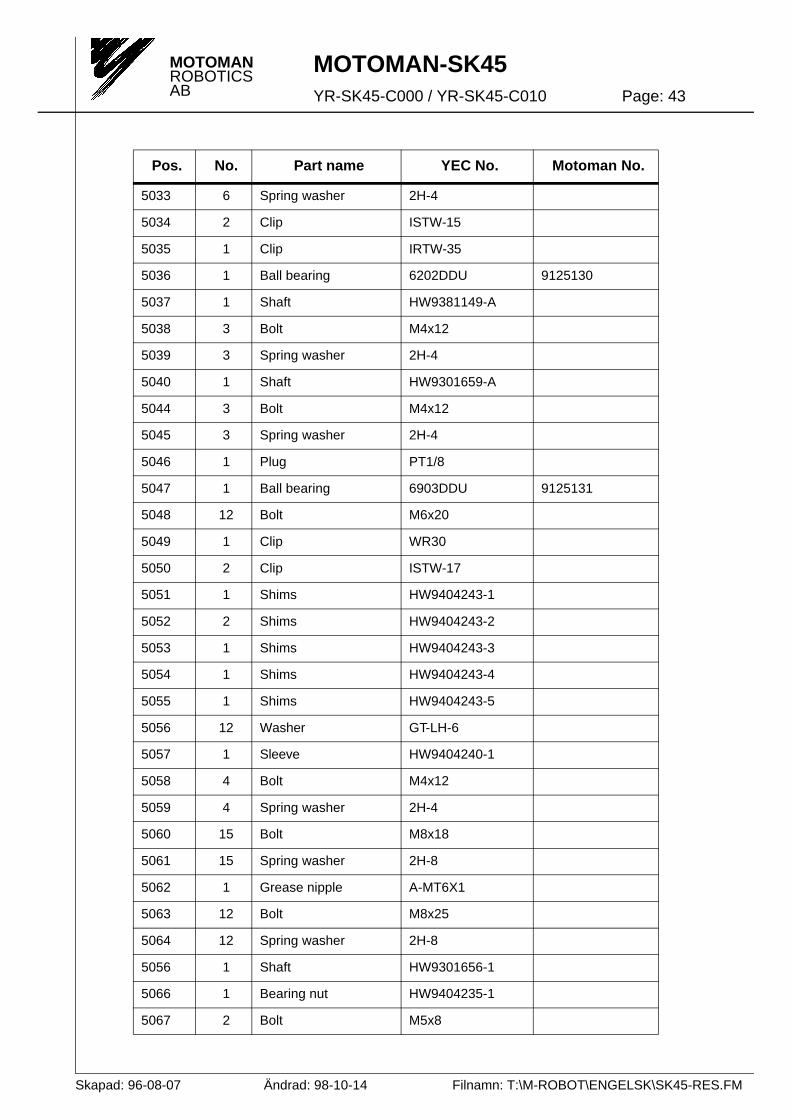
Page: 43YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
5033 6 Spring washer 2H-4
5034 2 Clip ISTW-15
5035 1 Clip IRTW-35
5036 1 Ball bearing 6202DDU 9125130
5037 1 Shaft HW9381149-A
5038 3 Bolt M4x12
5039 3 Spring washer 2H-4
5040 1 Shaft HW9301659-A
5044 3 Bolt M4x12
5045 3 Spring washer 2H-4
5046 1 Plug PT1/8
5047 1 Ball bearing 6903DDU 9125131
5048 12 Bolt M6x20
5049 1 Clip WR30
5050 2 Clip ISTW-17
5051 1 Shims HW9404243-1
5052 2 Shims HW9404243-2
5053 1 Shims HW9404243-3
5054 1 Shims HW9404243-4
5055 1 Shims HW9404243-5
5056 12 Washer GT-LH-6
5057 1 Sleeve HW9404240-1
5058 4 Bolt M4x12
5059 4 Spring washer 2H-4
5060 15 Bolt M8x18
5061 15 Spring washer 2H-8
5062 1 Grease nipple A-MT6X1
5063 12 Bolt M8x25
5064 12 Spring washer 2H-8
5056 1 Shaft HW9301656-1
5066 1 Bearing nut HW9404235-1
5067 2 Bolt M5x8
Pos. No. Part name YEC No. Motoman No.

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 44 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
5068 3 Bolt M4x10
5069 3 Spring washer 2H-4
5070 3 Set screw M4x6
5071 1 Washer HW9404292-1
5072 2 Plate HW9404391-1
5073 1 Bolt M6x16
5074 1 Spring washer 2H-6
5075 1 Cover HW9301655-1
5076 6 Bolt M5x16
5077 6 Spring washer 2H-5
5078 2 Bolt M6x14
5079 2 Spring washer 2H-6
5080 1 Housing HW9404242-1
5081 6 Bolt M5x30
5082 6 Spring washer 2H-5
5083 1 Sleeve HW9404232-1
5084 1 Sleeve HW9404232-2
5085 1 Shims HW9404239-1
5086 1 Shims HW9404239-2
5087 1 Shims HW9404239-3
5088 1 Shims HW9404239-4
5089 1 Shims HW9404239-5
5090 1 Bearing cover HW9404236-1
5091 3 Bolt M4x10
5092 3 Spring washer 2H-4
5093 1 Sleeve HW9404232-3
5094 1 Shims HW9404234-1
5095 1 Shims HW9404234-2
5096 1 Shims HW9404234-3
5097 1 Shims HW9404234-4
5098 1 Shims HW9404234-5
5099 1 Sleeve HW9404232-4
Pos. No. Part name YEC No. Motoman No.
MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
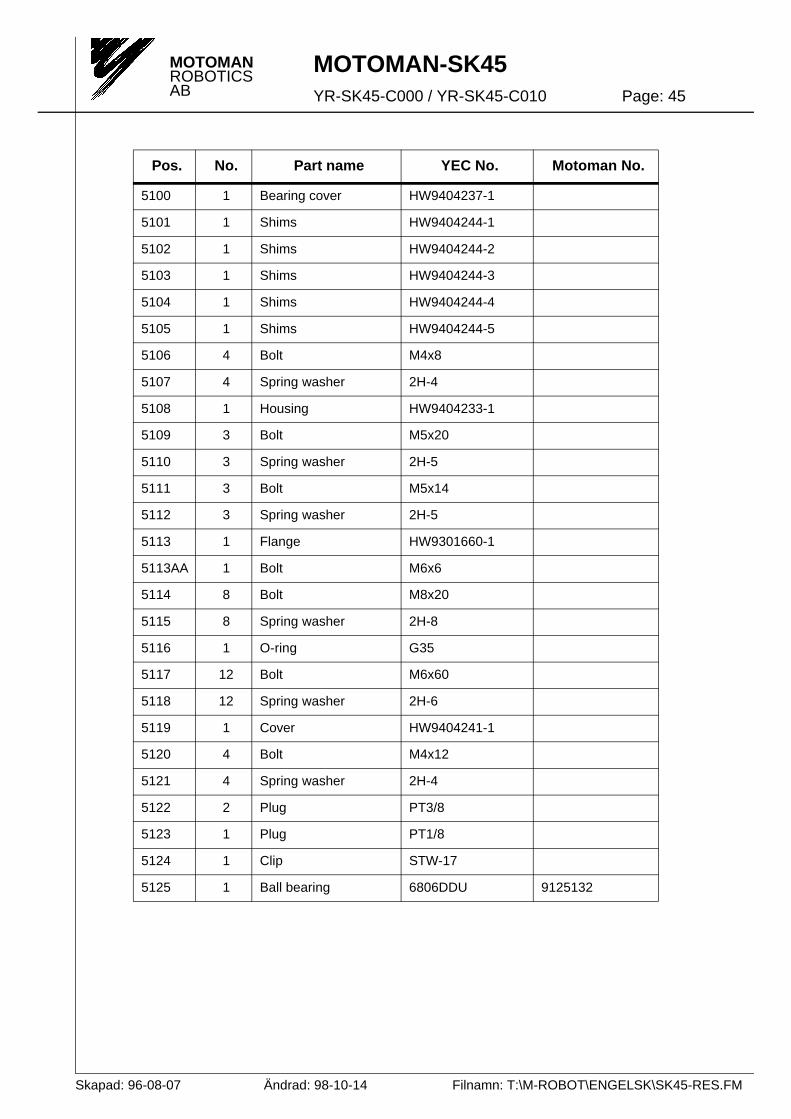
Page: 45YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICSAB
5100 1 Bearing cover HW9404237-1
5101 1 Shims HW9404244-1
5102 1 Shims HW9404244-2
5103 1 Shims HW9404244-3
5104 1 Shims HW9404244-4
5105 1 Shims HW9404244-5
5106 4 Bolt M4x8
5107 4 Spring washer 2H-4
5108 1 Housing HW9404233-1
5109 3 Bolt M5x20
5110 3 Spring washer 2H-5
5111 3 Bolt M5x14
5112 3 Spring washer 2H-5
5113 1 Flange HW9301660-1
5113AA 1 Bolt M6x6
5114 8 Bolt M8x20
5115 8 Spring washer 2H-8
5116 1 O-ring G35
5117 12 Bolt M6x60
5118 12 Spring washer 2H-6
5119 1 Cover HW9404241-1
5120 4 Bolt M4x12
5121 4 Spring washer 2H-4
5122 2 Plug PT3/8
5123 1 Plug PT1/8
5124 1 Clip STW-17
5125 1 Ball bearing 6806DDU 9125132
Pos. No. Part name YEC No. Motoman No.

MOTOMAN-SK45
Skapad: 96-08-07 Ändrad: 98-10-14 Filnamn: T:\M-ROBOT\ENGELSK\SK45-RES.FM
Page: 46 YR-SK45-C000 / YR-SK45-C010
MOTOMANROBOTICS
AB
This page is left blank by purpose !

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 47MOTOMANROBOTICSAB
Technical specifications
Articel
Data for MOTOMAN-SK45
Motion range Maximum speed Allowable moment Allowable inertia
Operation mode Vertically
Degree of freedom 6
Payload 45 kg
Repetitive positioning accuracy ±0,15 mm
S-axis (turning) 360° 2,62 rad/s, 150°/s
L-axis (lower arm) 240° 2,09 rad/s, 120°/s
U-axis (upper arm) 265° 2,71 rad/s, 155°/s
R-axis (wrist roll) 700° 4,19 rad/s, 240°/s 176,4 Nm 10,8 kgm²
B-axis (wrist pitch/yaw) 250° 4,19 rad/s, 240°/s 176,4 Nm 10,8 kgm²
T-axis (wrist twist) 700° 5,93 rad/s, 340°/s 98 Nm 5 kgm²
Weight 600 kg
Colour YASKAWA BLUE

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 48MOTOMANROBOTICSAB
Article
Data for MOTOMAN-SK45-30
Motion range Maximum speed Allowable moment Allowable inertia
Operation mode Vertically
Degree of freedom 6
Payload 30 kg
Repetitive positioning accuracy ±0,15 mm
S-axis (turning) 360° 2,62 rad/s, 150°/s
L-axis (lower arm) 240° 2,09 rad/s, 120°/s
U-axis (upper arm) 255° 2,71 rad/s, 155°/s
R-axis (wrist roll) 700° 4,19 rad/s, 240°/s 176,4 Nm 10,8 kgm²
B-axis (wrist pitch/yaw) 250° 4,19 rad/s, 240°/s 176,4 Nm 10,8 kgm²
T-axis (wrist twist) 700° 5,93 rad/s, 340°/s 98 Nm 5 kgm²
Weight 610 kg
Colour YASKAWA BLUE

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 49MOTOMANROBOTICSAB
Article
Common data for MOTOMAN-SK45 and SK45-30
Motion range Maximum speed Allowable moment Allowable inertia
Ambient conditions Temperature 0°C to +45°C
Humidity 20 to 80% RH, Non - condensing
Vibration Less than 0,5 G
Others Free from corrosive gasses, liquids or explosive gasses.Clean and dry.Free from excessive electrical noise (plasma).
Power capacity Top: 10 kVA, Common: 8 kVA

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 50MOTOMANROBOTICSAB
Service schedule
Daglig
1.000
6.000
12.000
24.000
181315 16
16
20
1817
17
15
1
1
1
1
2
2
2
2 3
3
3
3 14
5
5
5 6
6
6
4
4
4
4
4
4
4
4 8
8
8
9
9 7
7
7
16
16 19
19 12
12
11 10

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 51MOTOMANROBOTICSAB
No.Schedule (Daily / interval)
Check point Method OperationD 1.000 6.000 12.000 24.000
1 ✔ ✔ ✔ ✔ Tram mark Visual Check for tram mark.
2 ✔ ✔ ✔ ✔ External lead Visual Check for damage or deterioration.
3 ✔ ✔ ✔ ✔ Working area and robot
Visual Clean the working area if dust or spatter exists.Check for damage and outside cracks.
4 ✔ ✔ ✔ ✔ L- and U-axes mounting baseplate
Visual Check for leakage.
5 ✔ ✔ ✔ Baseplate mounting screws
Wrench Tighten loose bolts.Replace if necessary.
6 ✔ ✔ ✔ Cover mounting screws
Screw driver Wrench
Tighten loose bolts.Replace if necessary.
7 ✔ ✔ ✔ Motor connectors Manual Check for loose connector and tighten if necessary.
8 ✔ ✔ ✔ Base connectors Manual Check for loose connector and tighten if necessary.
9 ✔ ✔ Shield coil to cablage
Visual Remove the cover and check the wear of the shield coil. Seal with new grease.
10 ✔ R- and B-axes timing belt
Manual Check for tension and wear of belt.

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 52MOTOMANROBOTICSAB
11 ✔ Wire harness in robot.
VisualMultimeter
Check for conduction between the main connector of base and intermediate connector. Check for wear of protective spring. Shall be carried out with servomotors disconnected. Replace cable lead after 24.000H.
12 ✔ ✔ S-, L- and U-axes limit switch set.
Screw driverWrench keyMultimeter
Check for stain, damage and looseness. Tighten and check the dog movement.
13 ✔ L- and U-axes link VisualManual
Move the L- and U-axes forward, backward, up and down to check for looseness of the bearing.Supply grease after 6.000H.Replace grease after 12.000H.
14 ✔ Battery unit in robot Multimeter If the robot is 2.8V or less, replace the battery unit.
15 ✔ ✔ S-axis speedreducer
Grease gun Check for malfunction.Supply grease after 6.000H.Replace grease after 12.000H.
16 ✔ ✔ L- and U-axes speed reducer
Grease gun Check for malfunction.Supply grease after 6.000H.Replace grease after 12.000H.
No.Schedule (Daily / interval)
Check point Method OperationD 1.000 6.000 12.000 24.000

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 53MOTOMANROBOTICSAB
17 ✔ ✔ R-axis speedreducer
Grease gun Check for malfunction.Supply grease after 6.000H.Replace grease after 12.000H.
18 ✔ ✔ B- and T-axes speed reducers
Grease gun Check for malfunction.Supply grease after 6.000H.Replace grease after 12.000H.
19 ✔ ✔ L-axis cross roller bearing
Grease gun Check for malfunction.Supply grease after 6.000H.
20 ✔ Overhaul Contact MOTOMAN-service.
No.Schedule (Daily / interval)
Check point Method OperationD 1.000 6.000 12.000 24.000

Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
Page: 54MOTOMANROBOTICSAB
Spare Parts MOTOMAN-SK45 / -SK45-30Rank A: ConsumablesRank B: Parts for which replacement may be necessary as a result of frequent operation.Rank C: Drive units.
Rank No. Parts Name Type Manufacturer Qty. Qty/unit Remarks
A1 Battery unit HW8471030-A YASKAWA ELECTRIC
CORPORATION1 1 S-axis
2 Grease Molywhite RENo. 00
YASKAWA ELECTRIC CORPORATION
16 kg -
3 Alvania EPGrease 2
Shell 16 kg -
B 4 Timing belt 250S5M525 Bando ChemicalIndustries Ltd.
1 1 R-axis
5 Timing belt 250S5M475 1 1 B-axis
6 S-axis speed reducer HW9380736-A
YASKAWA ELECTRIC CORPORATION
1 1 S-axis
7 L-axis speed reducer HW9380616-A 1 1 L-axis
8 U-axis speed reducer HW9380616-B 1 1 U-axis
9 R-axis speed reducer HW9280679-A 1 1 R-axis
10 B-axis speed reducer HW9381139-A 1 1 B-axis
11 T-axis speed reducer HW9280651-A 1 1 T-axis
Service manual SK45 / SK45-30
Skapad: 95-04-24 Ändrad: 98-09-22 Filnamn: T:\M-ROBOT\ENGELSK\SK45-TAB.FM
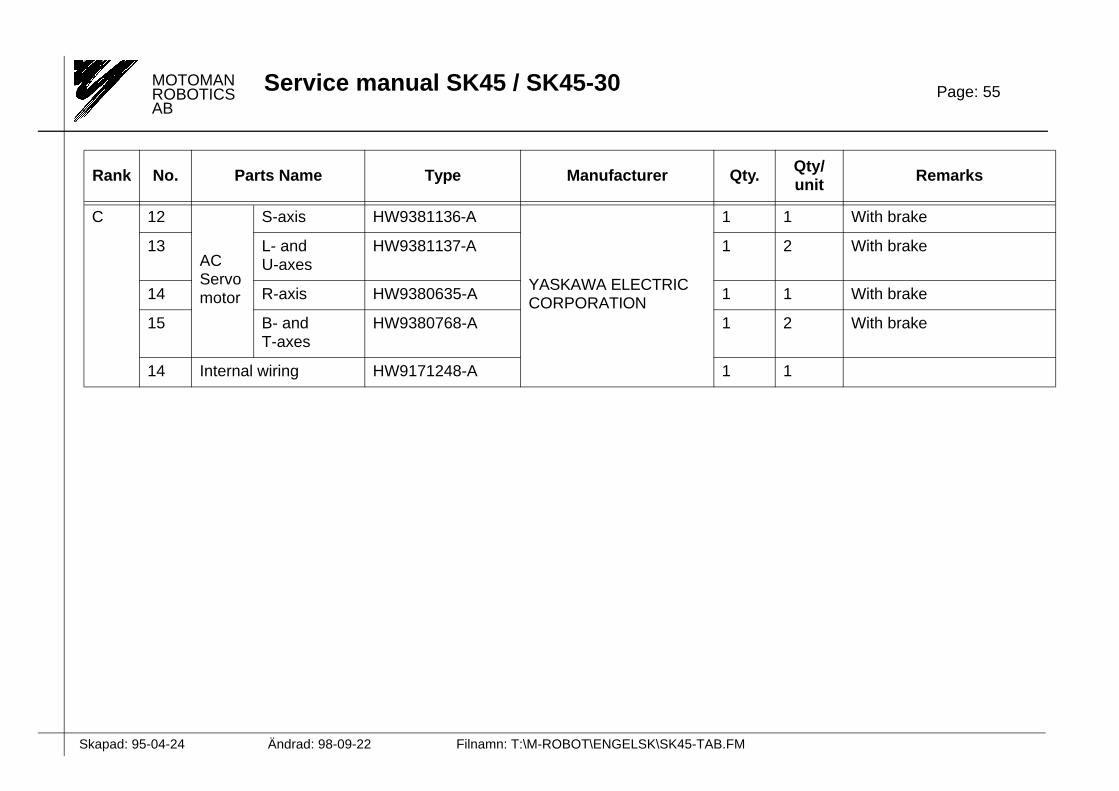
Page: 55MOTOMANROBOTICSAB
C 12
AC Servo motor
S-axis HW9381136-A
YASKAWA ELECTRIC CORPORATION
1 1 With brake
13 L- and U-axes
HW9381137-A 1 2 With brake
14 R-axis HW9380635-A 1 1 With brake
15 B- and T-axes
HW9380768-A 1 2 With brake
14 Internal wiring HW9171248-A 1 1
Rank No. Parts Name Type Manufacturer Qty. Qty/unit Remarks