Robot Manipulator Kinematics - ent.mrt.ac.lkrohan/teaching/ME5144/LectureNotes/Lec 5... · Robot...
9
Lecture 05 Robot Manipulator Kinematics Acknowledgement : Prof. Oussama Khatib, Robotics Laboratory, Stanford University, USA Prof. Harry Asada, AI Laboratory, MIT, USA 1 Robot Manipulator Kinematics • Kinematics is the analysis of motion without regard to the forces/torques that cause the motion. • Within kinematics, one studies position, velocity, acceleration (and even higher order derivatives of position) w.r.t. time 2 Forward and Inverse Kinematics • Forward Kinematics (FK) – Static geometrical problem of computing position and orientation of the end-effector relative to the base frame given the arm configuration • Inverse Kinematics (IK) – IK determines the arm configuration θ, for a given position and orientation of the end-effector x. – IK is the practical problem of manipulator control. – IK is often ill-posed, need numerical methods to solve IK. – For all x outside the workspace, IK produces no solutions θ indicating that the manipulator cannot attain those position. Joint space Description θ (arm configuration) Cartesian space Description X {tool} w.r.t {base} FK IK Link and joint parameters 3 T z y x z y x ) , , , , , ( φ φ φ = x T n ) , , ( 2 1 θ θ θ L = θ Kinematics of Planner Serial Linkages • Planar kinematics is much more tractable mathematically, compared to general three-dimensional kinematics Consider the three degree-of-freedom planar robot arm, which consists of one fixed link (link 0) and three movable links that move on the plane. All the links are connected by revolute joints whose joint axes are all perpendicular to the plane of the links. {0} {1} {2} {3} 4
Transcript of Robot Manipulator Kinematics - ent.mrt.ac.lkrohan/teaching/ME5144/LectureNotes/Lec 5... · Robot...

Lecture 05
Robot Manipulator Kinematics
Acknowledgement :Prof. Oussama Khatib, Robotics Laboratory, Stanford University, USAProf. Harry Asada, AI Laboratory, MIT, USA
1
Robot Manipulator Kinematics
• Kinematics is the analysis
of motion without regard to
the forces/torques that
cause the motion.
• Within kinematics, one
studies position, velocity,
acceleration (and even
higher order derivatives of
position) w.r.t. time
2
Forward and Inverse Kinematics• Forward Kinematics (FK)
– Static geometrical problem of computing position and orientation of the end-effector relative to the base frame given the arm configuration
• Inverse Kinematics (IK)
– IK determines the arm configuration θ, for a given position and orientation of the end-effector x.
– IK is the practical problem of manipulator control.
– IK is often ill-posed, need numerical methods to solve IK.
– For all x outside the workspace, IK produces no solutions θindicating that the manipulator cannot attain those position.
Joint space
Description θ(arm configuration)
Cartesian space
Description X
{tool} w.r.t {base}
FK
IK
Link and joint
parameters
3
T
zyxzyx ),,,,,( φφφ=x
T
n ),,( 21 θθθ L=θ
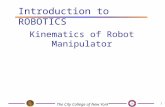
Kinematics of Planner Serial Linkages• Planar kinematics is much more tractable mathematically,
compared to general three-dimensional kinematics
Consider the three degree-of-freedom planar robot arm, which consists of one fixed link
(link 0) and three movable links that move on the plane. All the links are connected by
revolute joints whose joint axes are all perpendicular to the plane of the links.
{0}
{1}
{2}
{3}
4

• To describe the robot arm, the following geometric
parameters are required
• Link lengths : l1, l2, l3
• Identify joints and links
• Actuator 1 couples link0 to link1 and create θ1
• Actuator 2 couples link1 to link2 and create θ2
• Actuator 3 couples link2 to link3 and create θ3
• Set up the co-ordinate frame {0} fixed to the base
• Forward Kinematics: describes end-effector position (xe,ye)
and orientation in terms of joint displacements and link
lengths
Kinematics of Planner Serial Linkages
321
321321211
321321211
)sin()sin(sin)cos()cos(cos
θθθφθθθθθθθθθθθθ
++=+++++=+++++=
e
e
e
lllylllx
5
• Ex: Solve forward kinematics of the following planner RPR
manipulator
Kinematics of Planner Serial Linkages
• Joint displacements: θ1(rotary), d(prismatic), θ3(rotary)
• Joint displacement vector: q =[θ1 d θ3]T
6
Inverse Kinematics of Planner Manipulators
• Consider the problem of moving the end-effecter of a
manipulator arm to a specified position and orientation.
• We need to find the joint displacements that lead the end-
effecter to the specified position and orientation.
• To achieve desired end-effector position and orientation,
inverse kinematics is solved, and each joint is moved to the
determined values through joint controllers. IK is central to
manipulator control problem.
7
Inverse Kinematics Problem
• Inverse kinematics is more complex in the sense that
multiple solutions may exist for the same end-effecter
location
• Since the kinematic equation is comprised of nonlinear
simultaneous equations with many trigonometric
functions, it is not always possible to derive a closed-form solution.
• solutions may not always exist for a particular range of
end-effecter locations and arm structures
• When the kinematic equation cannot be solved
analytically, numerical methods are used in order to
derive the desired joint co-ordinates. 8

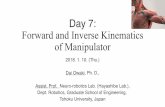
Inverse Kinematics• Ex: Solve IK of the planner
manipulator (given: xe ye φe)
• Use two step method (wrist and end)
approach
213
1
1
1
2
2
2
1
21
2
21
2
1
2
2
21
22
2
2
11
222
2
21
2
2
2
1
3
3
Then,
tan
2cos
cos2 ,Simillarly
2cos
where
cos2
sin
cos
θθφθ
γαθ
α
γ
γ
βπθ
β
β
φ
φ
−−=
−=⇒
=
−+=⇒
=−+
−=⇒
−+=⇒
+=
=−+
−=
−=
−
−
−
e
w
w
ww
eew
eew
x
y
rl
llr
lrllr
ll
rll
yxr
rllll
lyy
lxx
9
Multiple Solutions• Interestingly, elbow up configuration will also locate the end-
effector at the same position and orientation. Therefore,
there is another IK solution.
• When there are
multiple solutions
(arm configurations)
for IK, the manipulator is called a redundant arm
)(2
2
233
22
11
γθθθ
θθ
γθθ
−+=′
−=′
+=′
10
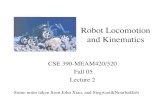
Multiple Solutions
• The existence of multiple solutions provides the robot with
an extra degree of flexibility. Consider a robot working in a
crowded environment. If multiple configurations exist for the
same end-effecter position/orientation, the robot can
choose the most appropriate, collision-free configuration.
• Each IK solution must satisfy joint range limits of rotary
joints and stroke limits of prismatic joints.
PUMA 560 arm Six rotary Joints Joint Limits
11
IK Parallel Linkages
44332511
44332511
2211
2211
sinsinsinsin
coscoscoscos
sinsin
coscos
θθθθ
θθθθ
θθ
θθ
lllly
lldllx
lly
llx
A
A
e
e
+=+=
++=+=
+=
+=
d
Step 1 (calculate θ1 and θ2)
Step 2 (calculate xA , yA ) Step 3 (calculate θ3 and θ4)
12

Inverse Kinematics of Parallel Linkages
x
y
Homework
Solve IK of the doggy robot
1. Given (xB,yB φB) → (xA,yA) and (xC,yC)
2. Knowing (xA,yA) → find θ1,θ2
3. Knowing (xC,yC) → θ3,θ4
13
Serial Link Manipulators
14
15 16

17 18
19 20

21 22
23
i α i-1 a i-1 d i θ i
1
2
3
Class Test: Derive the DH table of the following RRR
planner manipulator
i α i-1 a i-1 d i θ i
1 0 0 0 θ1
2 0 L1 0 θ2
3 0 L2 0 θ3
24

25 26
27
Stanford Schinman
Arm
28
Homogeneous transformation
between consecuitive joints

29
Homogeneous transformation
between consecuitive joints
30
Homogeneous transformation between any two
joints
31
Homogeneous transformation
from base to other joints
32

33
Programmable Universal Manipulator
Arm (PUMA) 560
• Assignment 2:
Write m-code to calculate forward kinematics of PUMA 560. Calculate end-effector position and orientation for a test arm configuration.34
Manipulator Frame Assignment and
Identification of DH parameters
35
DH Frame Assignment.flv
Frame Assignment for Denso VP6
Robot Manipulator Denso VP6.flv