robot kinematics
27
Robot Kinematics Representation of an object in 3-D Representation of the position = z y x U q q q Q ; 3x1 matrix
-
Upload
sumit-kumar -
Category
Education
-
view
125 -
download
3
Transcript of robot kinematics
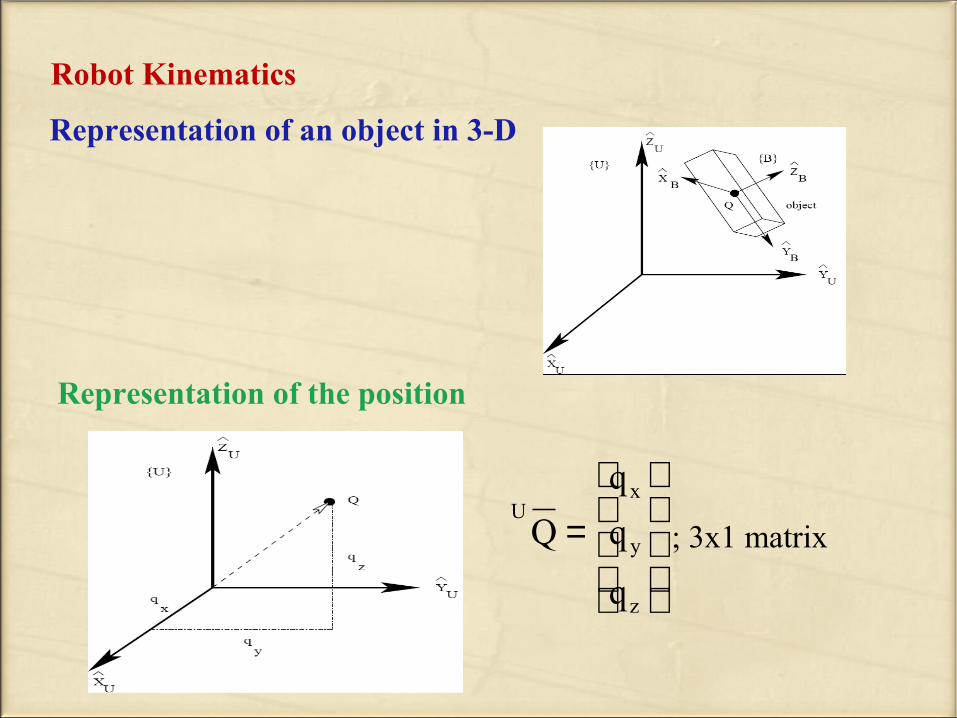
Robot Kinematics
Representation of an object in 3-D
Representation of the position
=
z
y
xU
q
q
q
Q ; 3x1 matrix
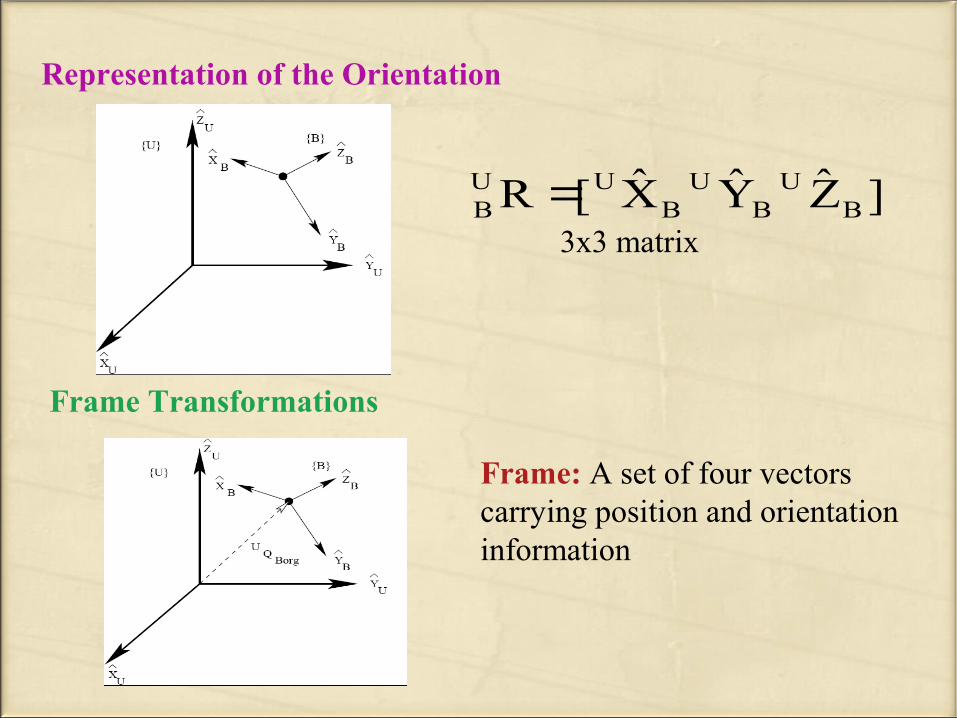
Representation of the Orientation
Frame Transformations
Frame: A set of four vectors carrying position and orientation information
]ZYX[R BU
BU
BUU
B =3x3 matrix
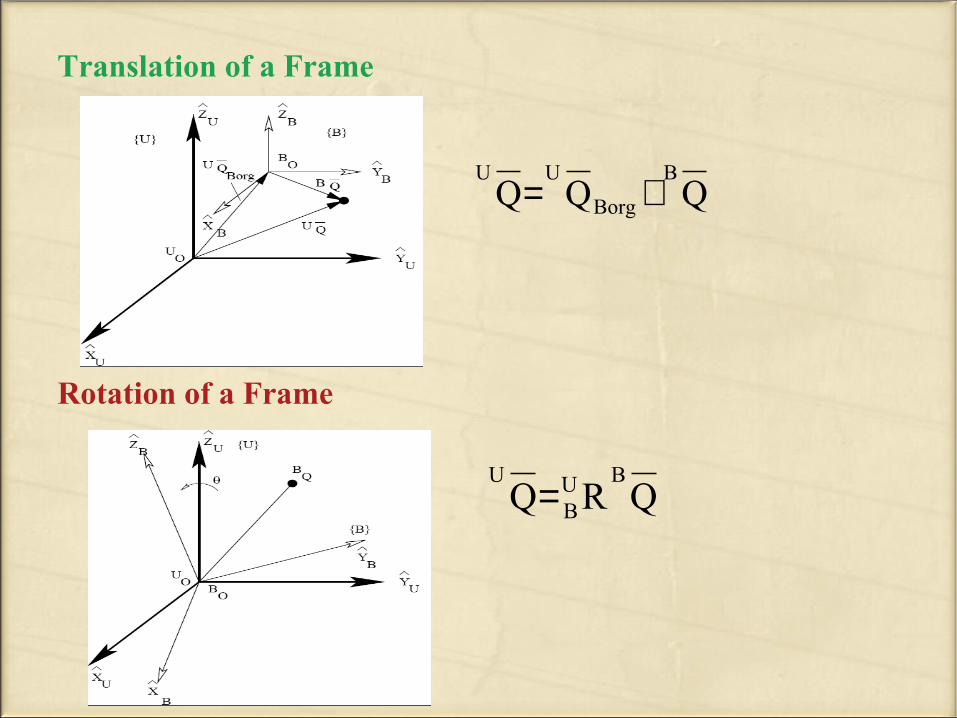
Translation of a Frame
Rotation of a Frame
QQQB
Borg
UU+=
QRQBU
B
U=

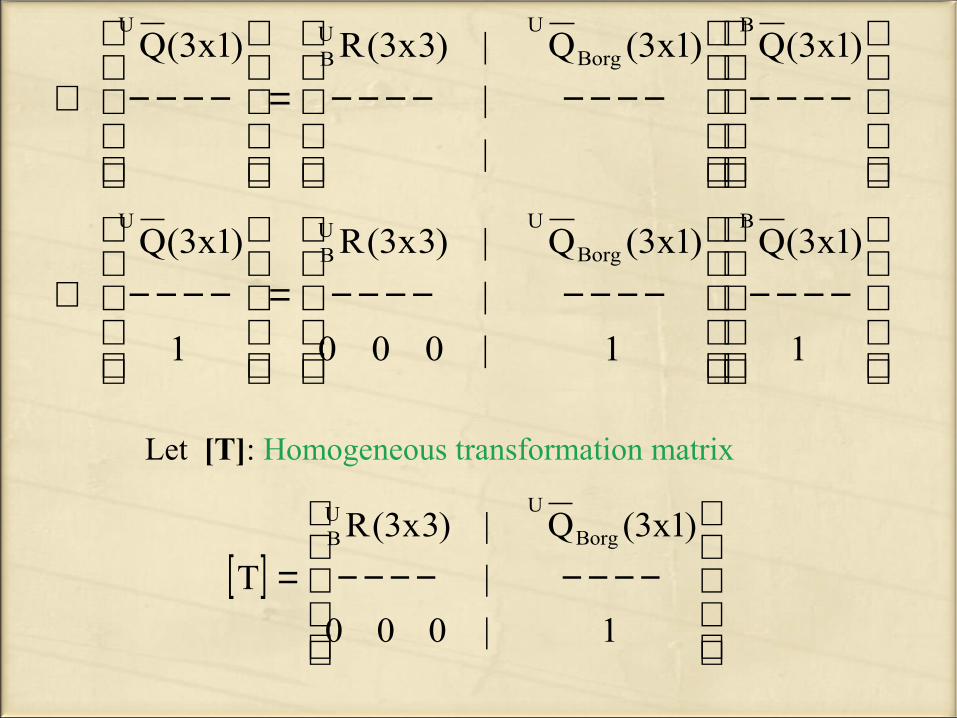
Translation and Rotation of a Frame
Borg
UBUB
UQQRQ +=
Borg
UBUB
UQQRQ +=
QTQBU
B
U=⇒
where T: transformation
−−−−
−−−−−−−−=
−−−−⇒
−−−−
−−−−−−−−=
−−−−⇒
1
)1x3(Q
1|000
|
)1x3(Q|)3x3(R
1
)1x3(Q
)1x3(Q
|
|
)1x3(Q|)3x3(R)1x3(Q
B
Borg
UUB
U
B
Borg
UUB
U
Let [T]: Homogeneous transformation matrix
[ ]
−−−−−−−−=1|000
|
)1x3(Q|)3x3(R
TBorg
UUB
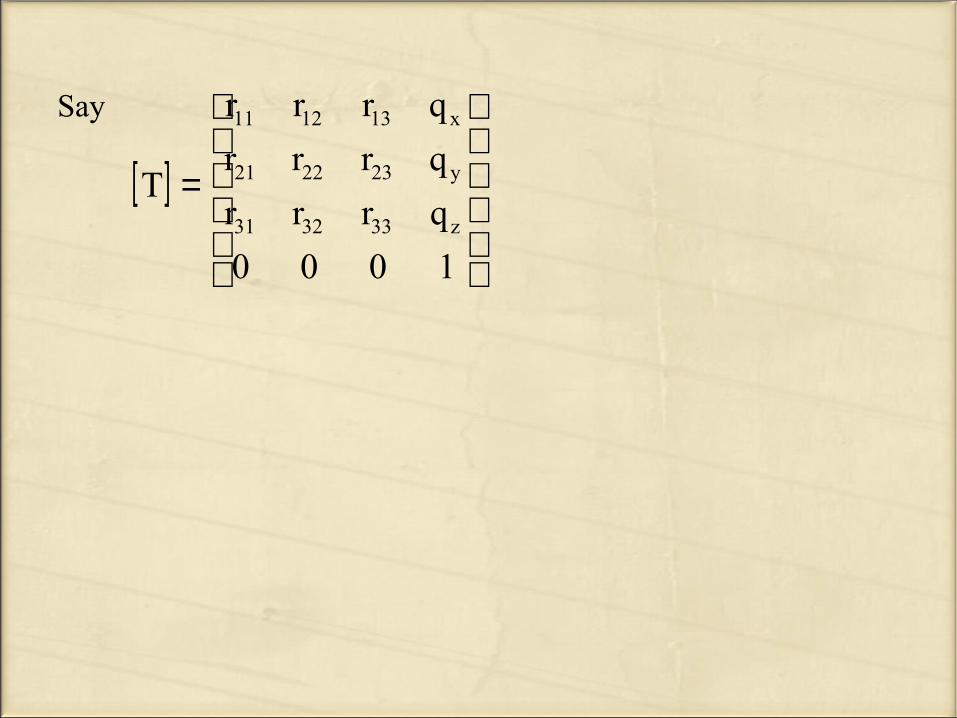
[ ]
=
1000
qrrr
qrrr
qrrr
Tz333231
y232221
x131211Say
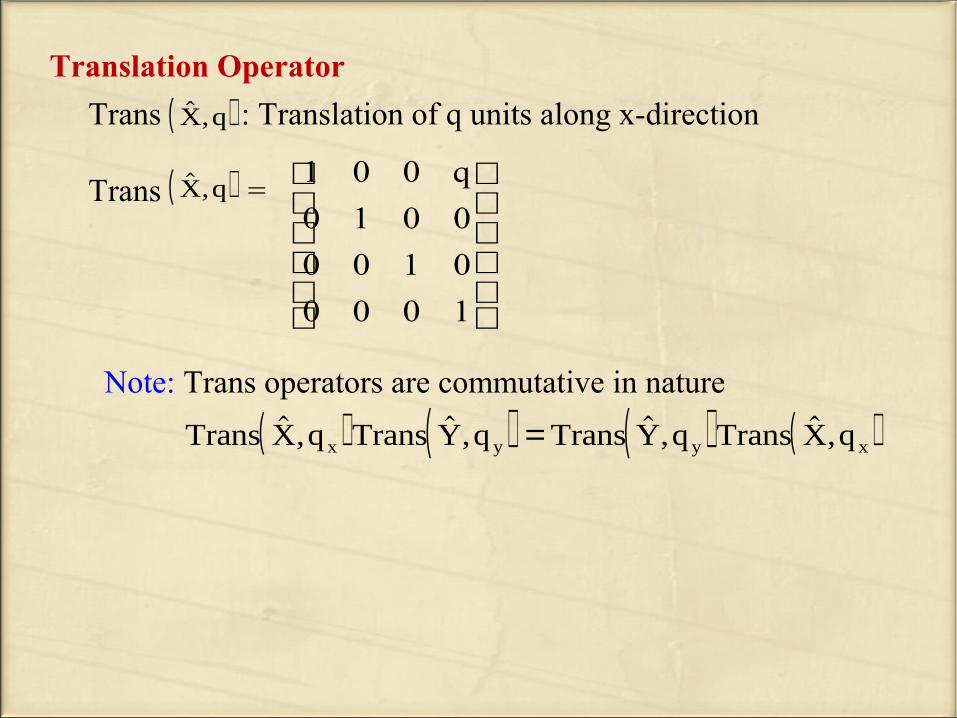
Translation Operator
Trans : Translation of q units along x-direction
Trans =
Note: Trans operators are commutative in nature
( ) ,X q
( ) ,X q
1000
0100
0010
q001
( ) ( ) ( ) ( )Trans X q Trans Y q Trans Y q Trans X qx y y x , , , ,=

Rotational Operator
Rot : Rotation about axis by an angle θ (anticlockwise sense)( ) ,Z θ Z
OC q Cosx= θDC q Sinx= θAQ q Cosy= θAD BC q Siny= = θ

q q Cos q Sin q XX x y z= − +θ θ 0
q q Sin q Cos q XY x y z= + +θ θ 0
q q X q X q XZ x y z= + +0 0 1
θθθ−θ
=
z
y
x
Z
Y
X
q
q
q
100
0cossin
0sincos
q
q
q
( )
θθθ−θ
=θ100
0cossin
0sincos
,ZRot
In matrix form:
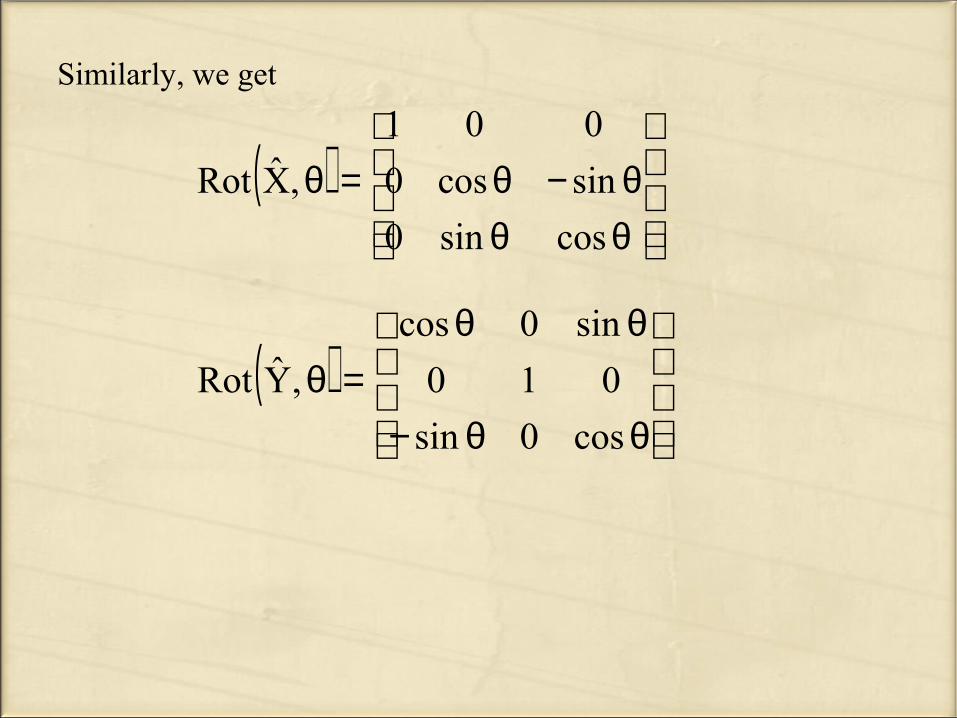
( )
θθθ−θ=θ
cossin0
sincos0
001
,XRot
Similarly, we get
( )
θθ−
θθ=θ
cos0sin
010
sin0cos
,YRot
Properties of Rotation Matrix
• Each row/column of a rotation matrix is a unit vector• Inner (dot) product of each row of a rotation matrix with each
other row becomes equal to 0. The same is true for each column also.
• Rotation matrices are not commutative in nature
• Inverse of a rotation matrix is nothing but its transpose
•
( ) ( ) ( ) ( )1221 ,XROT,YROT,YROT,XROT θθ≠θθ
( ) ( )θ=θ− ,XROT,XROT T1
BA
ABT T= −1
Composite Rotation MatrixComposite rotation matrix representing a rotation of α angle about , followed by a rotation of β angle about axis , followed by a rotation of γ angle about axis.
( ) ( ) ( )αβγ= ,ZROT,YROT,XROTROTcomposite
ZY
X
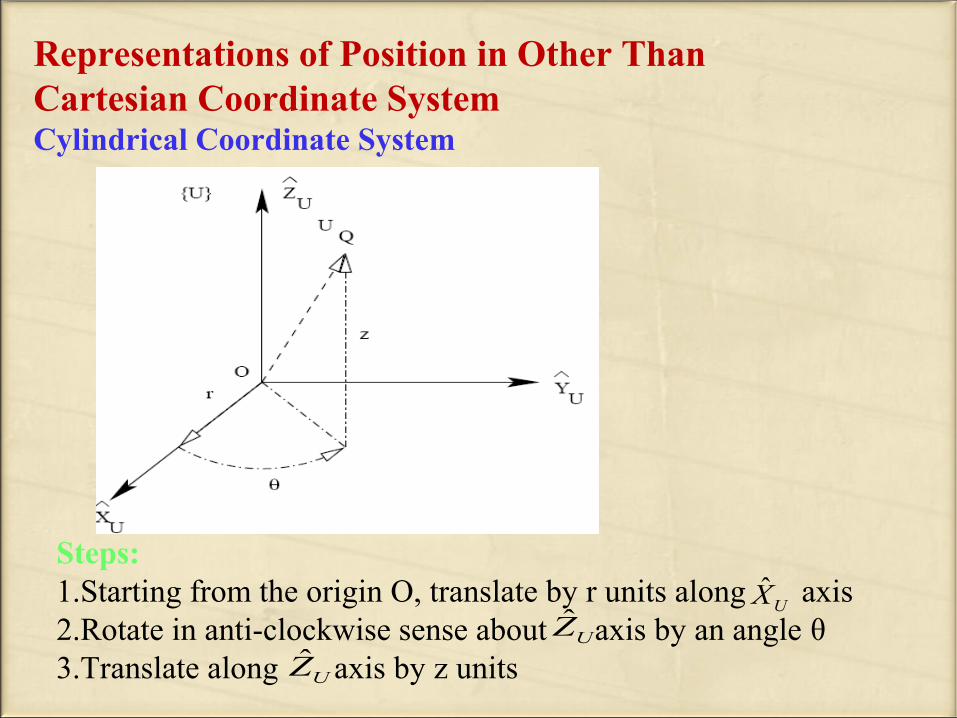
Representations of Position in Other Than Cartesian Coordinate SystemCylindrical Coordinate System
Steps:1.Starting from the origin O, translate by r units along axis2.Rotate in anti-clockwise sense about axis by an angle θ3.Translate along axis by z units
ˆUZ
ˆUZ
ˆUX
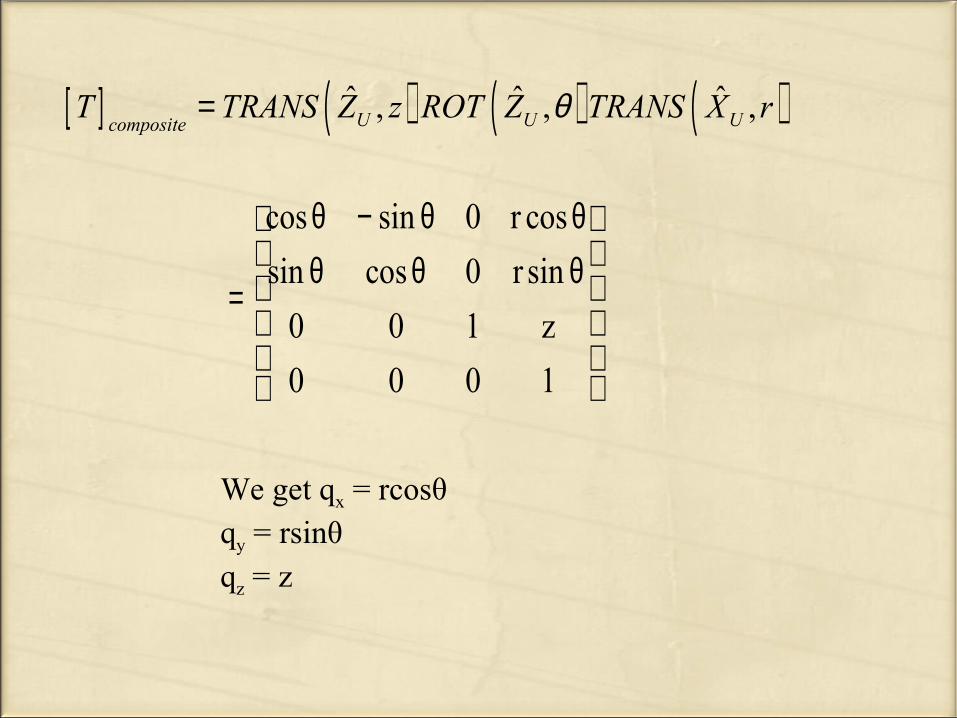
[ ] ( ) ( ) ( )ˆ ˆ ˆ, , ,U U UcompositeT TRANS Z z ROT Z TRANS X rθ=
θθθθθ−θ
=
1000
z100
sinr0cossin
cosr0sincos
We get qx = rcosθqy = rsinθqz = z
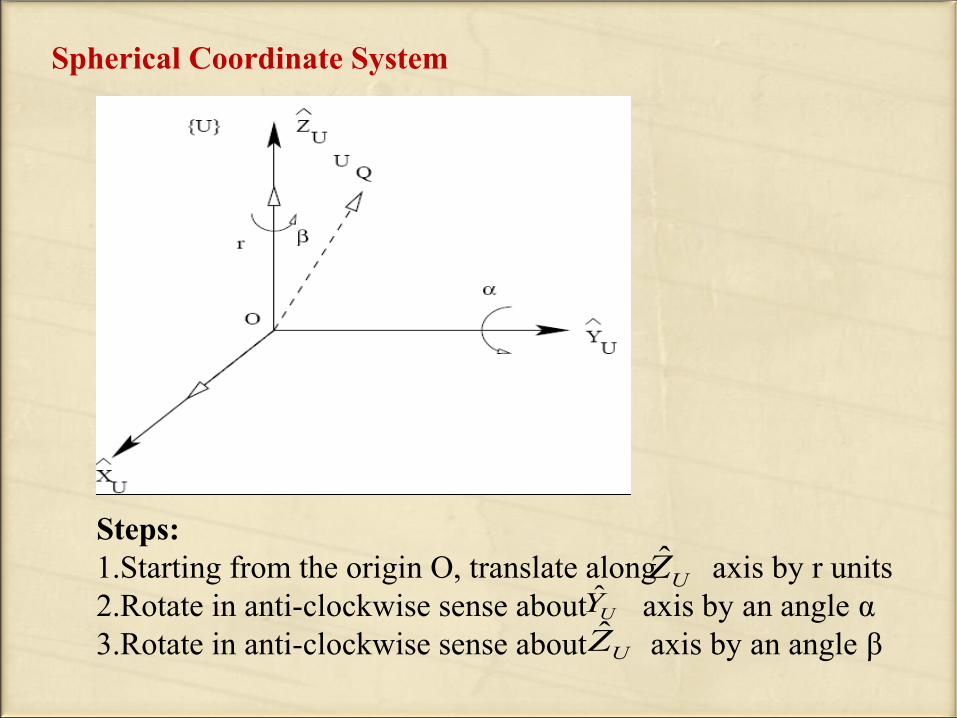
Spherical Coordinate System
Steps:1.Starting from the origin O, translate along axis by r units2.Rotate in anti-clockwise sense about axis by an angle α3.Rotate in anti-clockwise sense about axis by an angle β
ˆUZ
ˆUZUY
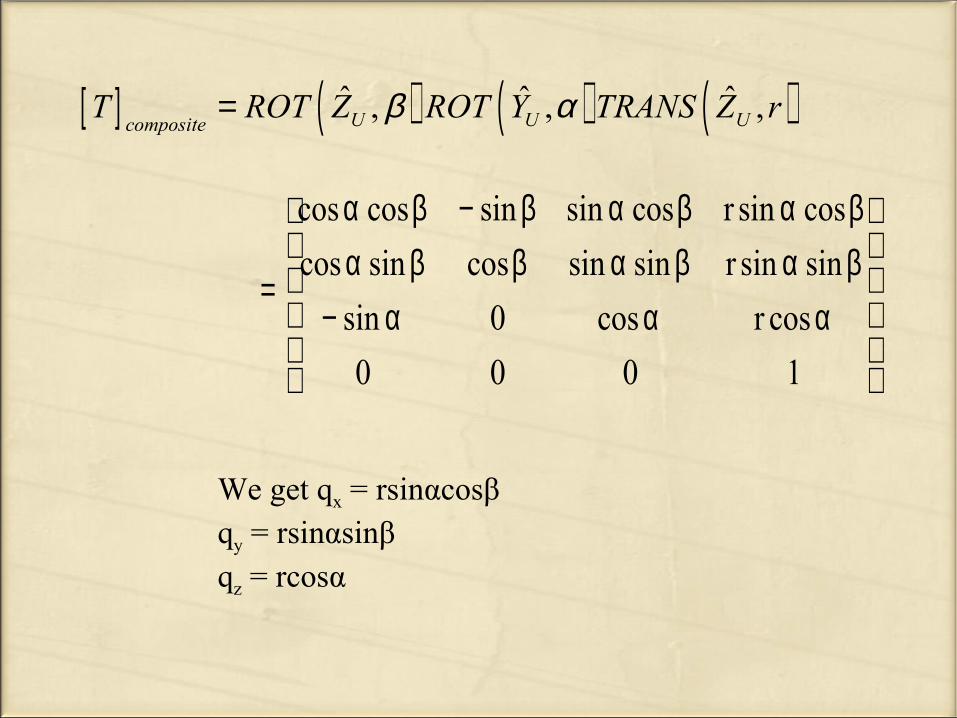
[ ] ( ) ( ) ( )ˆ ˆ ˆ, , ,U U UcompositeT ROT Z ROT Y TRANS Z rβ α=
ααα−βαβαββαβαβαβ−βα
=
1000
cosrcos0sin
sinsinrsinsincossincos
cossinrcossinsincoscos
We get qx = rsinαcosβqy = rsinαsinβqz = rcosα
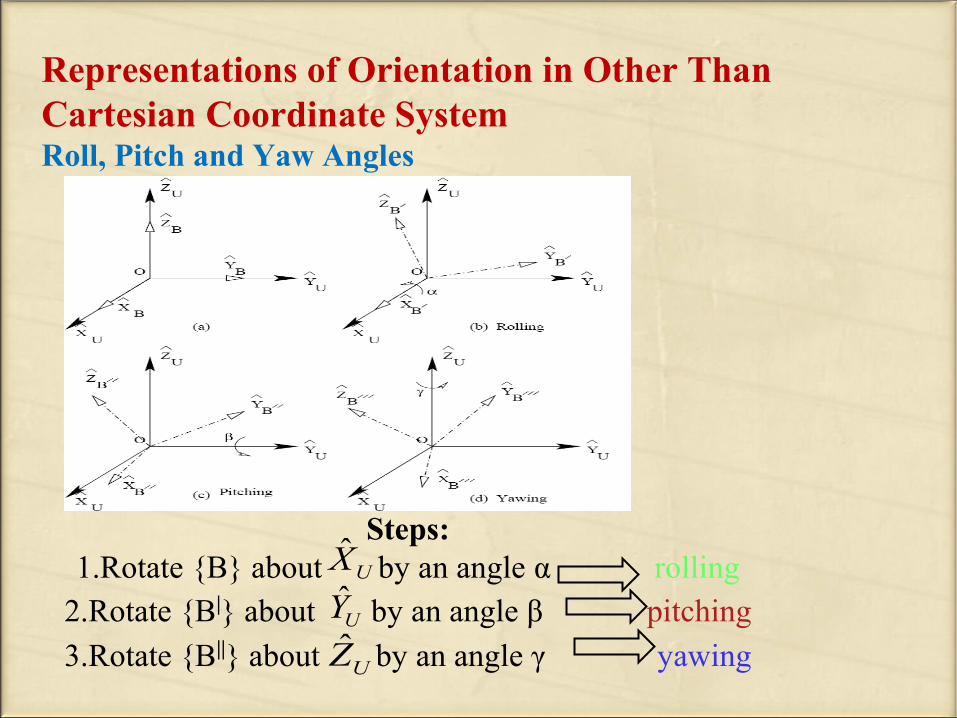
Representations of Orientation in Other Than Cartesian Coordinate SystemRoll, Pitch and Yaw Angles
Steps:1.Rotate {B} about by an angle α rolling
2.Rotate {B|} about by an angle β pitching
3.Rotate {B||} about by an angle γ yawing
ˆUX
ˆUZUY
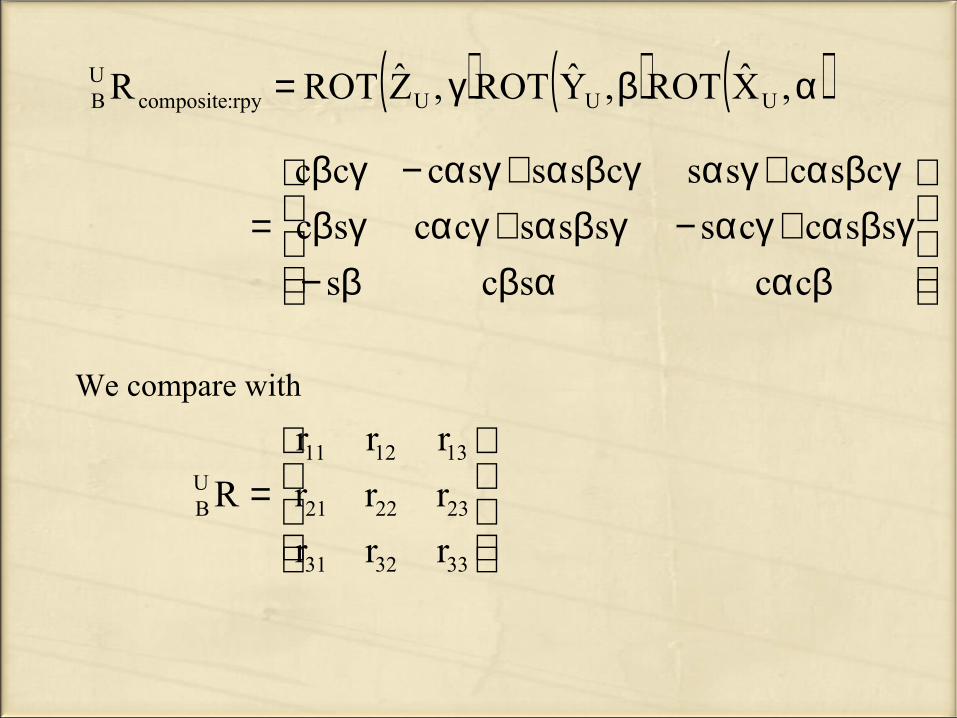
We compare with
( ) ( ) ( )αβγ= ,XROT,YROT,ZROTR UUUrpy:compositeUB
βααββ−γβα+γα−γβα+γαγβ
γβα+γαγβα+γα−γβ=
ccscs
ssccssssccsc
cscsscsssccc
=
333231
232221
131211UB
rrr
rrr
rrr
R
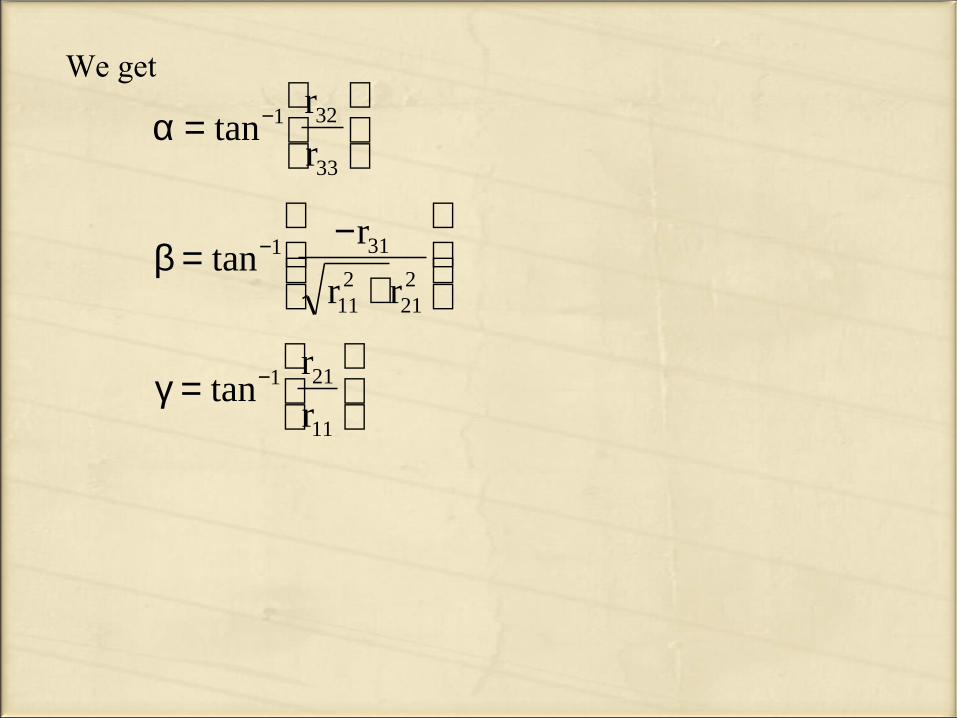
We get
α
β
γ
=
=−
+
=
−
−
−
tan
tan
tan
1 32
33
1 31
112
212
1 21
11
r
r
r
r r
r
r

Using Euler Angles
BU
UBR R= −1
Steps:1. Rotate {B} about by an angle α in anti-clockwise sense2. Rotate {B} about by an angle β in anti-clockwise sense3. Rotate {B} about by an angle γ in anti-clockwise sense
BZ
'BY
"BX
1U BB UR R−=

( ) ( ) ( )" 'ˆ ˆ ˆ, , ,B
U Eulerangles B B BR ROT X ROT Y ROT Zγ β α= − − −
γβγββ−αγ−αγβγα+αγββαγα+αγβγα−αγββα
=ccscs
csscsccssscs
ssccscscsscc
=
333231
232221
131211UB
rrr
rrr
rrr
R
We compare with
UBR
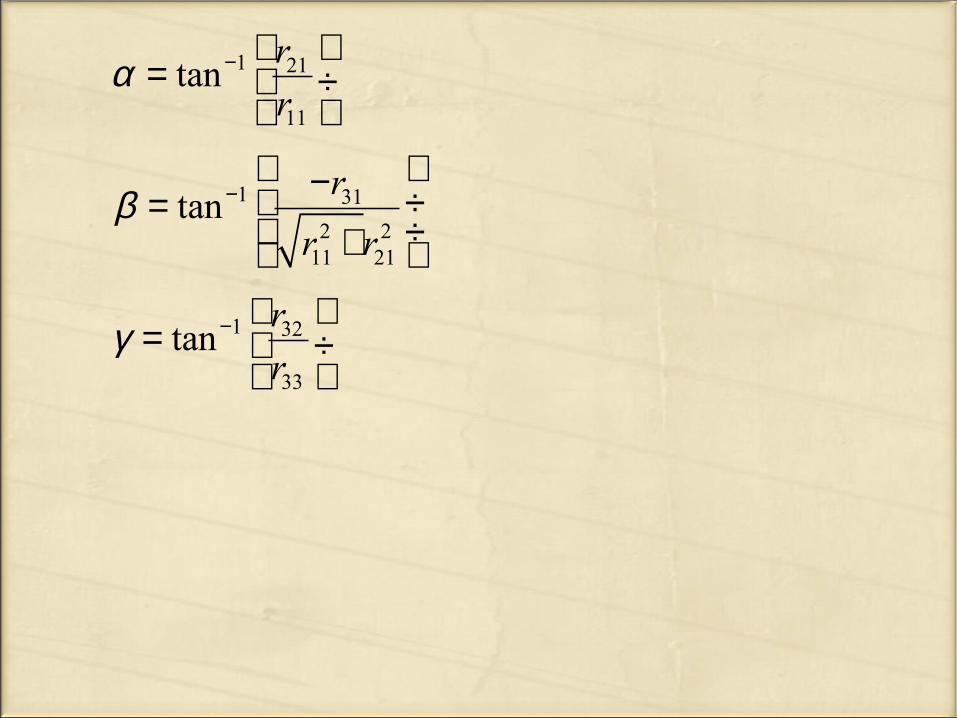
1 21
11
1 31
2 211 21
1 32
33
tan
tan
tan
r
r
r
r r
r
r
α
β
γ
−
−
−
= ÷
− ÷= ÷+
= ÷
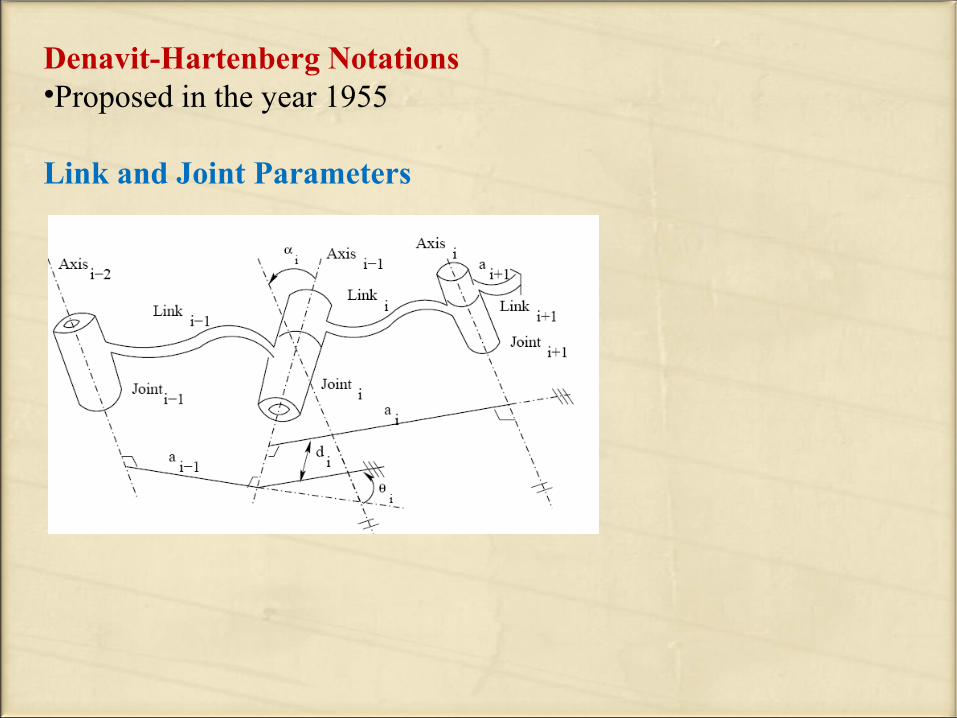
Denavit-Hartenberg Notations•Proposed in the year 1955
Link and Joint Parameters
•Offset of linki (di): It is the distance measured from a point where ai-1 intersects the Axisi-1 to the point where ai intersects the Axisi-1 measured along the said axis• Joint Angle (θ_i): It is defined as the angle between the extension
of ai-1 and ai measured about the Axisi-1
Notes:•Revolute joint: θi is variable
• Prismatic joint: di is variable
• Length of linki (ai): It is the mutual perpendicular distance between Axisi-1 and Axisi
•Angle of twist of link_i (αi): It is defined as the angle between Axisi-1 and Axisi
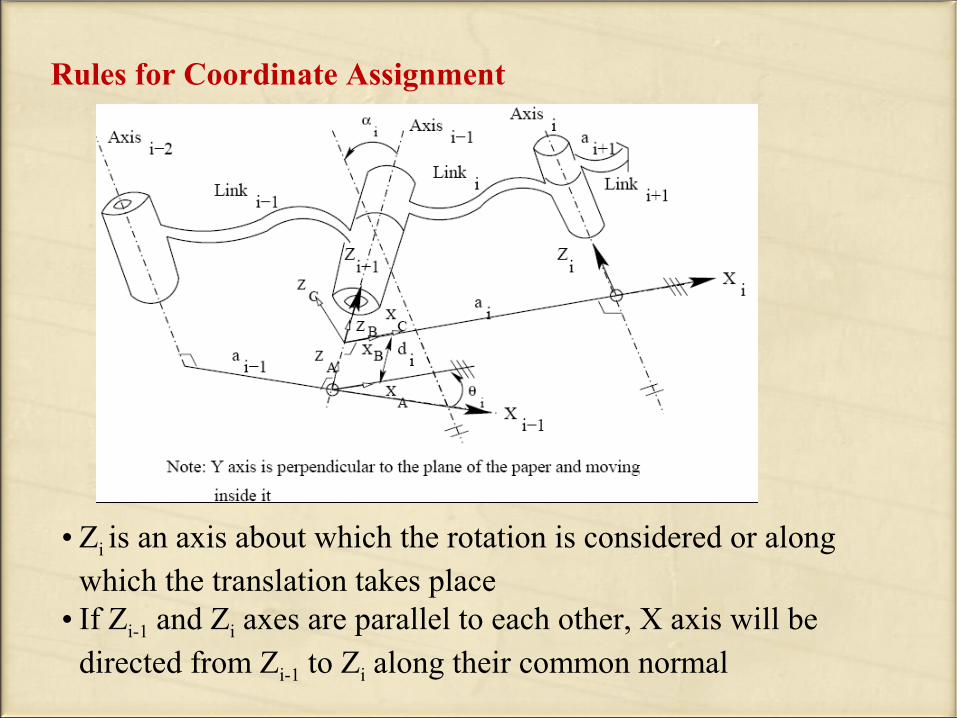
Rules for Coordinate Assignment
• Zi is an axis about which the rotation is considered or along which the translation takes place• If Zi-1 and Zi axes are parallel to each other, X axis will be
directed from Zi-1 to Zi along their common normal
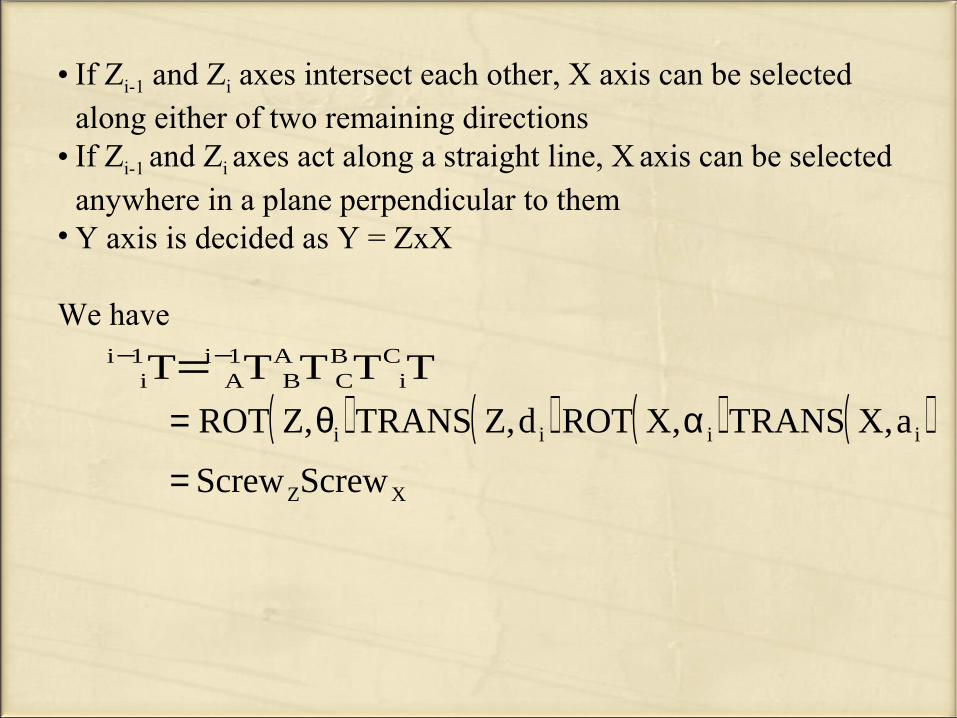
• If Zi-1 and Zi axes intersect each other, X axis can be selected along either of two remaining directions• If Zi-1 and Zi axes act along a straight line, X axis can be selected
anywhere in a plane perpendicular to them•Y axis is decided as Y = ZxX
We have
ii
Ai
BA
CB
iCT T T T T− −=1 1
( ) ( ) ( ) ( )= ROT Z, TRANS Z,d ROT X TRANS X ai i i iθ α, ,
= Screw ScrewZ X
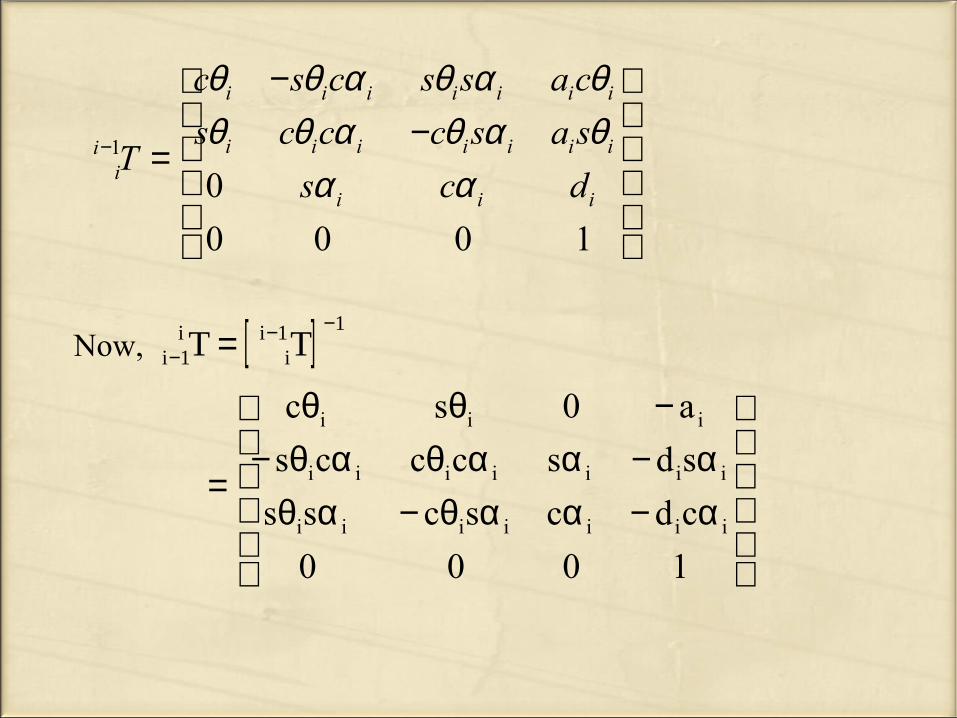
Now,
1
0
0 0 0 1
i i i i i i i
i i i i i i iii
i i i
c s c s s a c
s c c c s a sT
s c d
θ θ α θ α θθ θ α θ α θ
α α−
− − =
[ ]ii
iiT T−− −
=11 1
α−ααθ−αθα−ααθαθ−
−θθ
=
1000
cdcscss
sdscccs
a0sc
iiiiiii
iiiiiii
iii