
Robot Control - NIST
32
Robot Control 1 Sami Haddadin, Lars Johannsmeier
Transcript of Robot Control - NIST

Robot Control
1
Sami Haddadin, Lars Johannsmeier

Physical Interaction

Overview
performing a specific task
Control Design
Motion planning
SensingActuation
Task planning
Controller choice Stability analysis
e.g. Model-based control e.g. Passivity
Model Identification
Modeling and essential theories

Modeling and Essential Theories
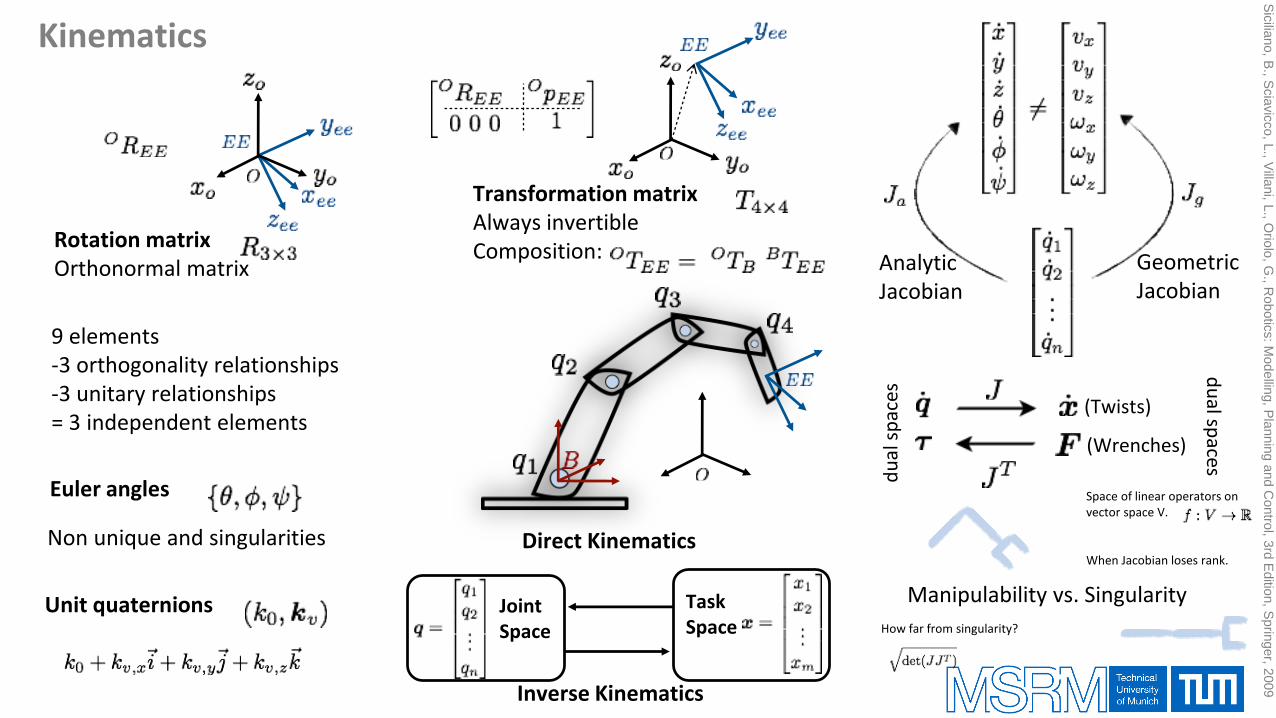
Kinematics
Rotation matrixOrthonormal matrix
9 elements -3 orthogonality relationships -3 unitary relationships= 3 independent elements
Euler angles
Unit quaternions
Non unique and singularities
Transformation matrixAlways invertible Composition:
Direct Kinematics
Inverse Kinematics
JointSpace
TaskSpace
AnalyticJacobian
GeometricJacobian
(Twists)
(Wrenches)
du
al s
pac
es
du
al spaces
Manipulability vs. Singularity
Sic
iliano, B
., Scia
vic
co
, L., V
illani, L
., Orio
lo, G
., Robotic
s: M
odellin
g, P
lannin
g a
nd C
ontro
l, 3rd
Editio
n, S
prin
ger, 2
009
Space of linear operators on vector space V.
When Jacobian loses rank.
How far from singularity?

Redundancy
FRANKA EMIKA Non-invertible Jacobian
Inverse kinematics problems
Moore-Penrose Pseudo-inverseUnique and always existsSuch that (almost ident. for weighted):
Weighted pseudo-inverseDifferential inverse kinematics:Minimization of:
Null-space control
No motion
No Wrench
Task prioritization
Primary task Secondary task
Slo
tine, S
. B. (1
991, J
une). A
genera
l fram
ew
ork
for m
anagin
g m
ultip
le ta
sks in
hig
hly
redundant ro
botic
syste
ms. In
pro
ceedin
g o
f 5th
Inte
rnatio
nal C
onfe
rence o
n A
dvanced R
obotic
s (V
ol. 2
, pp. 1
211
-1216).
On velocity level
On torque level

RedundancyM
ansfre
d, N
., Dje
llab, B
., Rald
ua V
euth
ey, J
., Beck, F
., Ott, C
., Haddadin
, S., Im
pro
vin
g th
e P
erfo
rmance o
f
Bio
mechanic
ally
Safe
Velo
city
Contro
l for R
edundant R
obots
thro
ugh R
efle
cte
d M
ass M
inim
izatio
n

RedundancyM
ansfe
ld, N
., Beck, F
., Die
trich, A
., Haddadin
, S., In
tera
ctiv
e N
ull s
pace C
ontro
l for In
tuitiv
ely
Inte
rpre
table
Reconfig
ura
tion o
f Redundant M
anip
ula
tors
,

Dynamics Direct Dynamics
Inverse Dynamics
Newton-Euler method(Wrench balance approach)
(numeric)
Euler-Lagrange method(energy-based approach)
(symbolic)
vs.
Sic
iliano, B
., Scia
vic
co, L
., Villa
ni, L
., Orio
lo, G
., Robotic
s: M
odellin
g, P
lannin
g a
nd C
ontro
l, 3rd
Editio
n, S
prin
ger, 2
009
Skew-symmetry of:
& skew-symmetric
Operational Space Dynamics
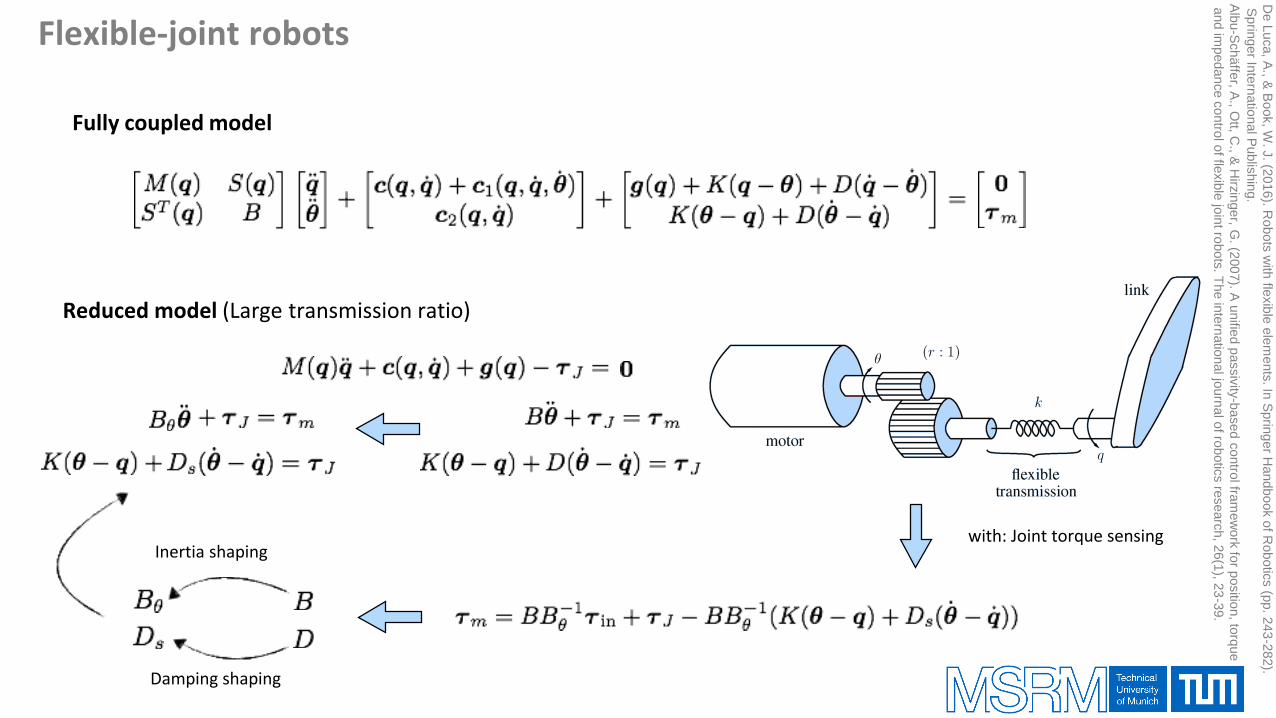
Flexible-joint robots
Fully coupled model
Reduced model (Large transmission ratio)
Inertia shaping
Damping shaping
with: Joint torque sensing
Alb
u-S
chäffe
r, A., O
tt, C., &
Hirz
inger, G
. (2007). A
unifie
d p
assiv
ity-b
ased c
ontro
l fram
ew
ork
for p
ositio
n, to
rque
and im
pedance c
ontro
l of fle
xib
le jo
int ro
bots
. The in
tern
atio
nal jo
urn
al o
f robotic
s re
searc
h, 2
6(1
), 23
-39.
De L
uca, A
., & B
ook, W
. J. (2
016). R
obots
with
flexib
le e
lem
ents
. In S
prin
ger H
andbook o
f Robotic
s (p
p. 2
43
-282).
Sprin
ger In
tern
atio
nal P
ublis
hin
g.

Take Me by the Hand!A
lbu-S
chäffe
r et. a
l. ICR
A 2
002, A
lbu
-Schäffe
r et. a
l. IJR
R2007

Collision HandlingH
addadin
, S., D
e L
uca, A
., Alb
u-S
chäffe
r, A. (2
017). R
obot C
ollis
ions: A
Surv
ey o
n D
ete
ctio
n, Is
ola
tion, a
nd Id
entific
atio
n,
Accepte
d fo
r IEE
E T
ransactio
ns o
n R
obotic
s
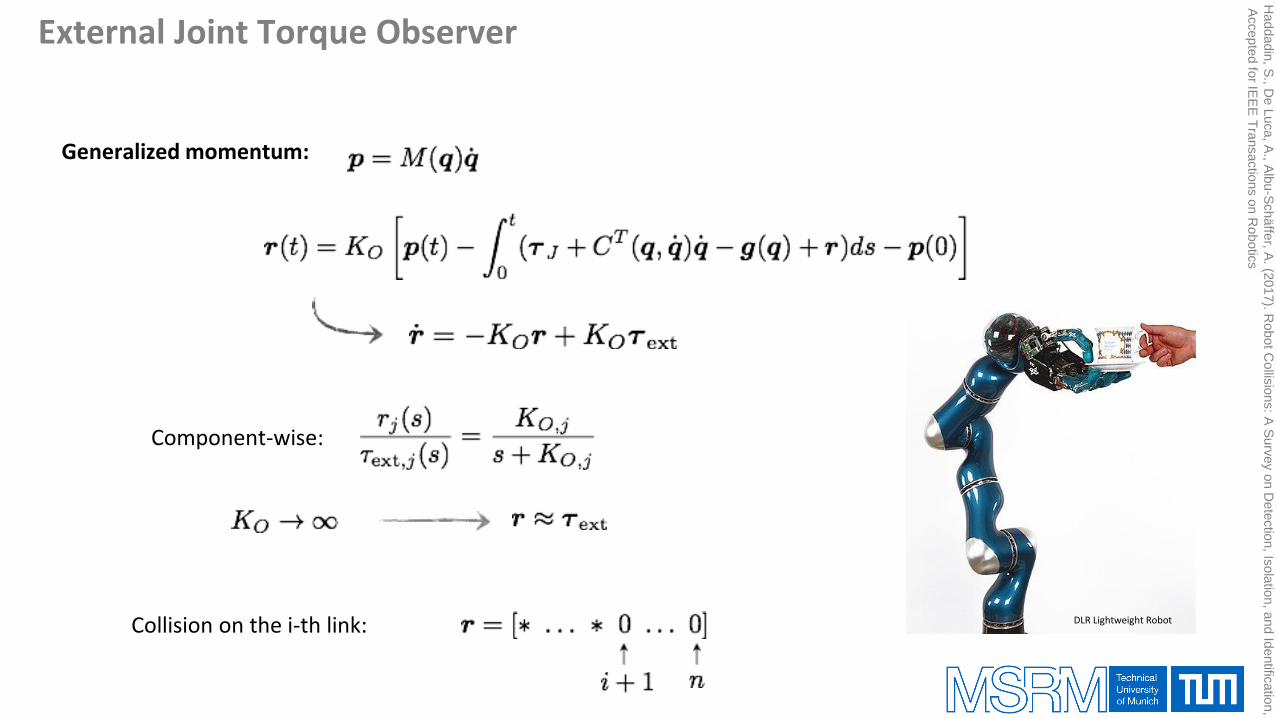
External Joint Torque Observer
Generalized momentum:
Component-wise:
Collision on the i-th link: DLR Lightweight Robot
Haddadin
, S., D
e L
uca, A
., Alb
u-S
chäffe
r, A. (2
017). R
obot C
ollis
ions: A
Surv
ey o
n D
ete
ctio
n, Is
ola
tion, a
nd Id
entific
atio
n,
Accepte
d fo
r IEE
E T
ransactio
ns o
n R
obotic
s

Collision HandlingH
addadin
et. a
l. RS
S 2
007
Haddadin
et. a
l. IJR
R 2
009
2012 G
eorg
e G
iralt P
hD
Aw
ard
ICR
A B
est S
erv
ice R
obotic
s A
ward

Model Identification

Identification ProcedureK
halil, W
., & D
om
bre
, E. (2
004). M
odelin
g, id
entific
atio
n a
nd c
ontro
l of ro
bots
. Butte
rworth
-Hein
em
ann.
Control Design

Early pHRI

Joint Impedance Control
Robot dynamics:
Required control input:
Avoidance of inertia shaping:
Desired impedance behavior:
Closed-loop dynamics:
PD+ controller
No need for external joint torque sensing
Compliance control
DLR Lightweight Robot
Ott, C
. (2008). C
arte
sia
n im
pedance c
ontro
l of re
dundant a
nd fle
xib
le-jo
int ro
bots
. Sprin
ger.

Cartesian Impedance Control & Damping Design
Desired impedance behavior (without inertia shaping):
Required control input:
Design of stiffness:
Design of damping:Constant & defined by the application (Normally symmetric & positive).
Constant & diagonal not good.
Non-constant & non-diagonal inertia e.g. based on general eigenvalue decomposition of symmetric matrices
For any positive-definite matrix and symmetric matrix ,there is a non-singular matrix and a diagonal matrix such that:
In quasi-static case, at each position :
Damping factor:
Compliance control
DLR Lightweight Robot
Ott, C
. (2008). C
arte
sia
n im
pedance c
ontro
l of re
dundant a
nd fle
xib
le-jo
int ro
bots
. Sprin
ger.
i-th diagonalelement of
Stiffen up!
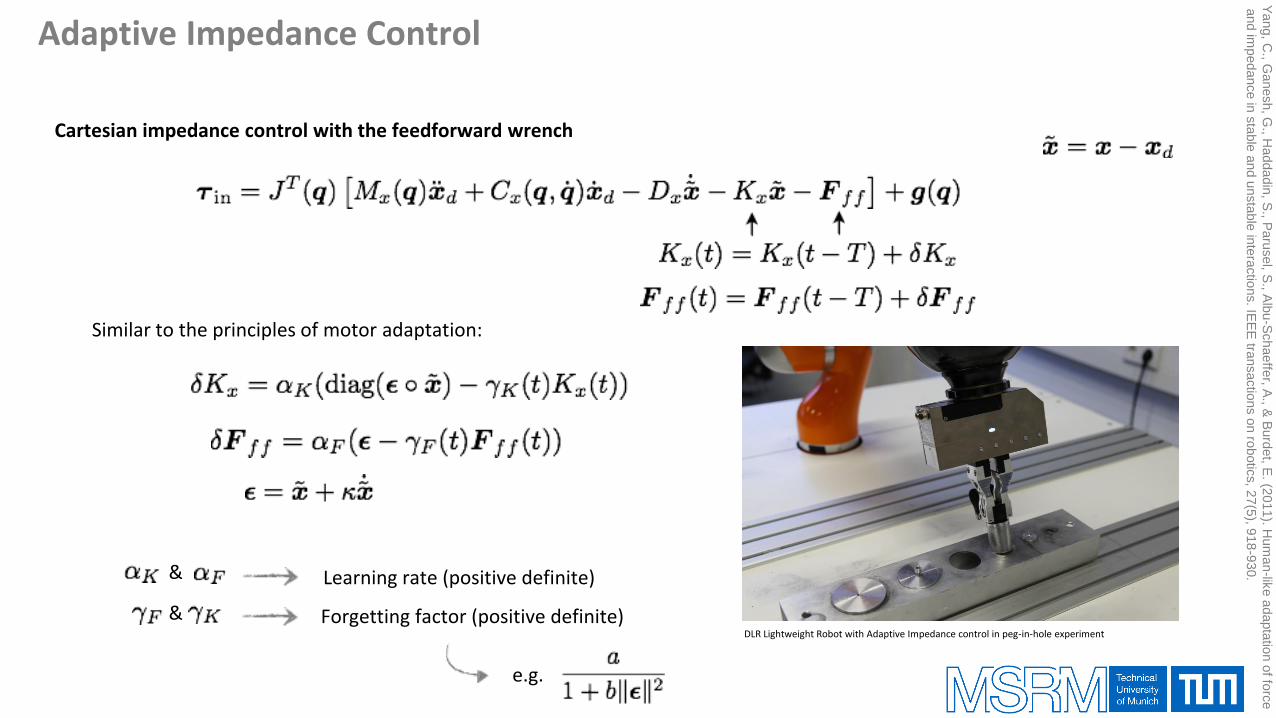
Adaptive Impedance Control
Cartesian impedance control with the feedforward wrench
Similar to the principles of motor adaptation:
& Learning rate (positive definite)
Forgetting factor (positive definite)&DLR Lightweight Robot with Adaptive Impedance control in peg-in-hole experiment
e.g.
Yang, C
., Ganesh, G
., Haddadin
, S., P
aru
sel, S
., Alb
u-S
chaeffe
r, A., &
Burd
et, E
. (2011). H
um
an
-like a
dapta
tion o
f forc
e
and im
pedance in
sta
ble
and u
nsta
ble
inte
ractio
ns. IE
EE
transactio
ns o
n ro
botic
s, 2
7(5
), 918
-930.

Hybrid Force Position ControlV
illani, D
e S
chutte
r Handbook o
f Robotic
s 2
008
Khatib
IJR
R, 1
987
Classical approach: partition motion and force space via selection matrix Ω
Disadvantage: Exact environment model has to be known!
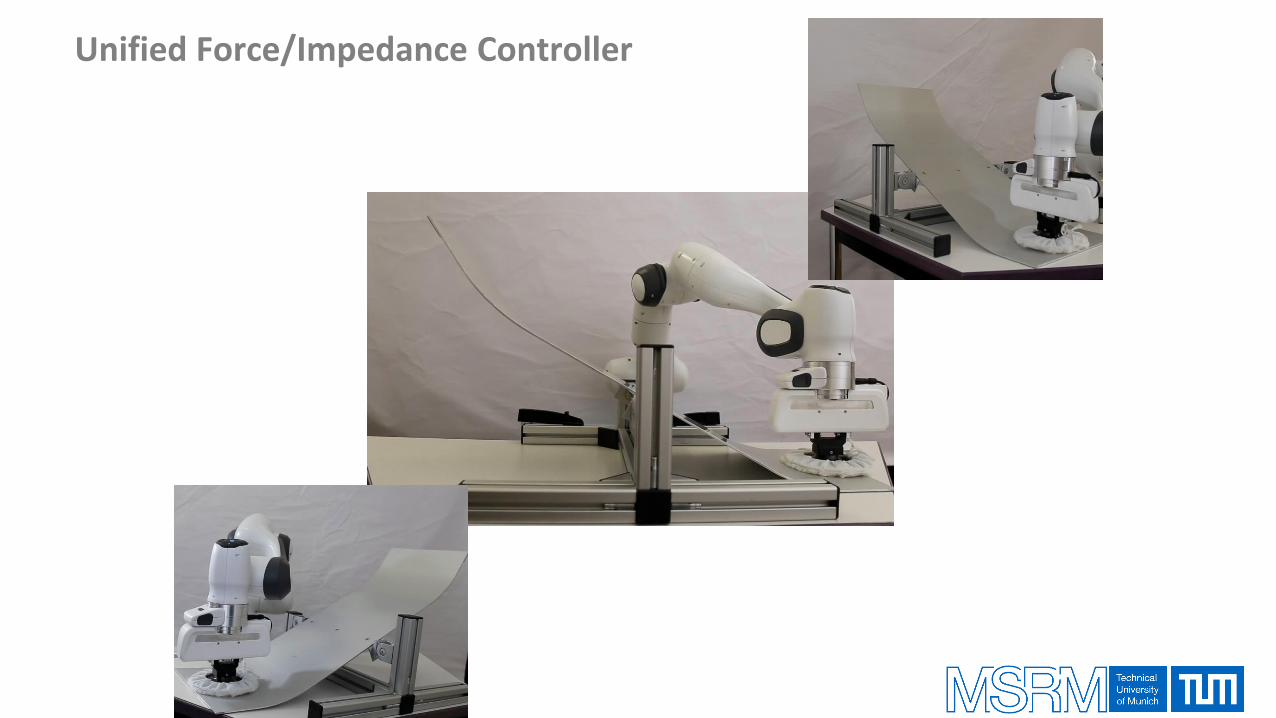
Unified Force/Impedance Controller

Without shaping function
With shaping function
Unified Force/Impedance Controller
Assembly and Soft Manipulation

Assembly and Soft Manipulation

Assembly and Soft Manipulation

Assembly Planning
• Framework for multi-agent assembly
• Optimal assignment of agents to tasks is planned
• Local motion and manipulation planning

Assembly Planning

• Robot knows a general strategy• Controller and skill parameters
are learned• Parameter space limits are
derived from known system limits and task context
Assembly Planning
The Endfund
konec
ende
край
enda
Endepää
fineinde
end
ände
τέλος son
ბოლოს
fine
समाप्त
конец
结束
fim
끝پایان
đầu cuối
終わり
ทา้ย
Соңы
അവസാനിക്കുന്നു
finisآخر
النهاية
סוף
krajmwisho
ముగింపు
վերջ
deireadh
aħħar
Sfârşit
עק
oxiri
শেষशेवटी
кінець
duloкрајот
અંત
Поён
diwedd
ọgwụgwụအဆ ုံး












![Robust Control of Robot Manipulators Using Inclusive and ...logos.dgist.ac.kr/xe/papers/Int_J/[2017] Robust Control of Robot... · need of a robot dynamics model, intelligent control](https://static.fdocuments.in/doc/165x107/5aea00a97f8b9ae5318bd559/robust-control-of-robot-manipulators-using-inclusive-and-logosdgistackrxepapersintj2017.jpg)




