Revisiting the Mars Surveyor Challenge · 2014. 8. 19. · Revisiting the Mars Surveyor Challenge...
1
Revisiting the Mars Surveyor Challenge Andrew Stubblebine, Tejas Deshpande, Dr. Elad Kivelevitch University of Cincinnati, College of Engineering and Applied Science Introduction Simulation Conclusion and Future Work 1999 MATLAB competition – Mars Surveyor Challenge Develop most effective solution to guide rovers through a map Motivation: UAV search and rescue missions are very common Ability to search an area faster could save lives Methods explored would increase search efficiency, especially multiple vehicles Greater search efficiency means search time reduced Original Challenge Conditions 1 2 3 Algorithm Selection 2 approaches based on lit. survey and performance speculation Rule-Based Algorithm: 4 New Maps: Genetic Algorithm: 4 New Maps: ℎ = , ℎ − , Evaluates ability of algorithms to find efficient solution Based on winning comp solution (considered best) Lower % is better Competition winner hard-coded to maps given by MathWorks Competition solution breaks down when required to work with different maps and/or additional rovers 4 additional maps added to further test new algorithms vs. comp. soln. Rule-Based Algorithm Genetic Algorithm Pros: Simple, easily scalable Fast computation time Gets decent results Pros: Works on any map Theoretically get best solution Theoretically scalable Cons: Limited visibility area Only local decisions made Can overwhelm rovers on difficult maps Cons: Computationally intensive Conclusions Rule-Based Algorithm: Genetic Algorithm: Rovers behave as expected Produced results nearly as good as competition solutions 7/12 maps strength < 5% Computationally intensive Given more time, can result in better solutions Improvements To Algorithms For Future Work Explore “back-up” algorithm in competition solution Implement fuzzy logic Incorporate path “back-tracking” Implement computationally efficient guided mutation Combine rule-based approach with GA -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1 2 3 4 5 6 7 8 9 10 11 12 Solution Strength Map Algorithm vs. Contest Solution Strength -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Original Maps (1-8) New Maps (9-12) All Maps (1-12) Total Solution Strength Total Solution Strength Rank #20 Soln Rank #50 Soln Rank #100 Soln Rule-Based Soln GA - 100 GA - 300
Transcript of Revisiting the Mars Surveyor Challenge · 2014. 8. 19. · Revisiting the Mars Surveyor Challenge...

Revisiting the Mars Surveyor Challenge Andrew Stubblebine, Tejas Deshpande, Dr. Elad Kivelevitch
University of Cincinnati, College of Engineering and Applied Science
Introduction Simulation
Conclusion and Future Work
1999 MATLAB competition – Mars Surveyor Challenge
Develop most effective solution to guide rovers through a map
Motivation:
UAV search and rescue missions are very common
Ability to search an area faster could save lives
Methods explored would increase search efficiency, especially
multiple vehicles
Greater search efficiency means search time reduced
Original Challenge Conditions
1
2 3
Algorithm Selection 2 approaches based on lit. survey and performance speculation
Rule-Based Algorithm:
4 New Maps:
Genetic Algorithm:
4 New Maps:
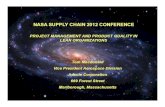
𝑆𝑜𝑙𝑢𝑡𝑖𝑜𝑛 𝑆𝑡𝑟𝑒𝑛𝑔𝑡ℎ = 𝑆𝑝𝑎𝑐𝑒𝑠 𝑀𝑖𝑠𝑠𝑒𝑑, 𝐴𝑙𝑔𝑜𝑟𝑖𝑡ℎ𝑚 − 𝑆𝑝𝑎𝑐𝑒𝑠 𝑀𝑖𝑠𝑠𝑒𝑑, 𝐵𝑒𝑠𝑡
𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑂𝑝𝑒𝑛 𝑆𝑝𝑎𝑐𝑒𝑠
Evaluates ability of algorithms to find efficient solution
Based on winning comp solution (considered best)
Lower % is better
Competition winner hard-coded to maps given by MathWorks
Competition solution breaks down when required to work with
different maps and/or additional rovers
4 additional maps added to further test new algorithms vs. comp.
soln.
Rule-Based Algorithm Genetic Algorithm
Pros:
Simple, easily scalable
Fast computation time
Gets decent results
Pros:
Works on any map
Theoretically get best solution
Theoretically scalable
Cons:
Limited visibility area
Only local decisions made
Can overwhelm rovers on
difficult maps
Cons:
Computationally intensive
Conclusions
Rule-Based Algorithm: Genetic Algorithm:
Rovers behave as expected
Produced results nearly as good
as competition solutions
7/12 maps strength < 5%
Computationally intensive
Given more time, can result in
better solutions
Improvements To Algorithms For Future Work
Explore “back-up” algorithm in
competition solution
Implement fuzzy logic
Incorporate path “back-tracking”
Implement computationally
efficient guided mutation
Combine rule-based approach
with GA
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8 9 10 11 12
Solu
tio
n S
tre
ngt
h
Map
Algorithm vs. Contest Solution Strength
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Original Maps (1-8) New Maps (9-12) All Maps (1-12)
Total Solution Strength
Total Solution Strength
Rank #20 Soln
Rank #50 Soln
Rank #100 Soln
Rule-Based Soln
GA - 100
GA - 300






![The Syrtis Major volcanic province, Mars: Synthesis from ... · on board the Mars Global Surveyor and Odyssey spacecraft in order to address these questions. 2. Data [5] For this](https://static.fdocuments.in/doc/165x107/5f092d207e708231d42596ee/the-syrtis-major-volcanic-province-mars-synthesis-from-on-board-the-mars-global.jpg)