RESONANCE-DEPENDENT WINKLER MODULI FOR LATERALLY- …
12
RESONANCE-DEPENDENT WINKLER MODULI FOR LATERALLY- LOADED PILES UNDER INERTIAL AND KINEMATIC LOADING George ANOYATIS 1 , Anne LEMNITZER 2 ABSTRACT Winkler models are widely used to predict the response of piles under lateral inertial and kinematic loading. Usually the pile is treated as a flexural beam and the restraining and dissipative action of the surrounding soil can be considered through independent horizontal sets of Winkler springs and dashpots (moduli) which are distributed uniformly along the pile length. The accuracy of such models is governed by the selection of the moduli, which depend on parameters such as soil-pile system geometry and stiffness, fixity conditions at the pile boundaries, type of loading. Existing expressions for Winkler moduli were implemented in a classical Winkler formulation to evaluate its ability to predict dynamic pile head stiffness and damping under inertial loading, as well as kinematic response factors and pile-soil curvature ratios under kinematic loading. Two frequency- and resonance- dependent Winkler moduli for inertial and kinematic soil-pile interaction are introduced. The first, is formulated by modifying the classic dynamic plane strain modulus of Baranov-Novak, while the second is derived by extending an existing static logarithmic-based expression to dynamic conditions. The new expressions offer a versatile alternative to existing mathematical tools as they can be used for both inertial and kinematic analyses, while the majority of frequency-independent expressions from literature is limited to kinematic applications. A performance assessment of inertial and kinematic Winkler models using the proposed moduli is performed via comparisons with more accurate solutions from the literature. Keywords: Winkler modulus; springs; dashpots, inertial, kinematic, soil-pile interaction 1. INTRODUCTION 1.1 Literature review and missing link Several methods of various degrees of accuracy and sophistication have been presented in the last decades to analyze the dynamic response of piles under lateral inertial and kinematic loading. Among the theoretical research efforts, two major groups can be identified: numerical and analytical. With reference to inertial soil-pile interaction finite element methods (e.g., Blaney et al. 1976, Roesset & Angelides 1980, Dobry et al 1982, El-Marsafawi et al. 1992, Syngros 2004) and boundary element methods (e.g., Kaynia & Kausel 1982, Sen et al. 1985, Padrón et al. 2007) yield accurate solutions for the pile response, but may be seen as computationally intensive and time consuming, especially when treating the three-dimensional problem. Rigorous analytical elastodynamic solutions (e.g., Pak & Jennings 1987, Rajapakse & Shah 1987) have received much less attention due to the complexity and sophistication in mathematical derivation, and focus on treating the soil as an elastic half-space. A subgroup of analytical models, which are based on the pioneering work of Tajimi (Tajimi 1969), offer approximate three-dimensional analytical solutions (e.g., Novak & Nogami 1977, Shadlou & Bhattacharya 2014, Latini et al. 2015, Anoyatis et al. 2016) and have the advantage of treating the soil as a layer instead of a half-space. In addition, such models can be further modified to consider soil 1 Senior Lecturer, Civil & Environmental Engineering Division, Faculty of Environment and Technology, University of the West of England - UWE Bristol, Bristol, UK, [email protected] 2 Assistant Professor, Department of Civil & Environmental Engineering, University of California Irvine, Irvine CA, US, [email protected]
Transcript of RESONANCE-DEPENDENT WINKLER MODULI FOR LATERALLY- …

RESONANCE-DEPENDENT WINKLER MODULI FOR LATERALLY-
LOADED PILES UNDER INERTIAL AND KINEMATIC LOADING
George ANOYATIS1, Anne LEMNITZER2
ABSTRACT
Winkler models are widely used to predict the response of piles under lateral inertial and kinematic loading.
Usually the pile is treated as a flexural beam and the restraining and dissipative action of the surrounding soil can
be considered through independent horizontal sets of Winkler springs and dashpots (moduli) which are distributed
uniformly along the pile length. The accuracy of such models is governed by the selection of the moduli, which
depend on parameters such as soil-pile system geometry and stiffness, fixity conditions at the pile boundaries, type
of loading. Existing expressions for Winkler moduli were implemented in a classical Winkler formulation to
evaluate its ability to predict dynamic pile head stiffness and damping under inertial loading, as well as kinematic
response factors and pile-soil curvature ratios under kinematic loading. Two frequency- and resonance- dependent
Winkler moduli for inertial and kinematic soil-pile interaction are introduced. The first, is formulated by modifying
the classic dynamic plane strain modulus of Baranov-Novak, while the second is derived by extending an existing
static logarithmic-based expression to dynamic conditions. The new expressions offer a versatile alternative to
existing mathematical tools as they can be used for both inertial and kinematic analyses, while the majority of
frequency-independent expressions from literature is limited to kinematic applications. A performance assessment
of inertial and kinematic Winkler models using the proposed moduli is performed via comparisons with more
accurate solutions from the literature.
Keywords: Winkler modulus; springs; dashpots, inertial, kinematic, soil-pile interaction
1. INTRODUCTION
1.1 Literature review and missing link
Several methods of various degrees of accuracy and sophistication have been presented in the last
decades to analyze the dynamic response of piles under lateral inertial and kinematic loading. Among
the theoretical research efforts, two major groups can be identified: numerical and analytical.
With reference to inertial soil-pile interaction finite element methods (e.g., Blaney et al. 1976, Roesset
& Angelides 1980, Dobry et al 1982, El-Marsafawi et al. 1992, Syngros 2004) and boundary element
methods (e.g., Kaynia & Kausel 1982, Sen et al. 1985, Padrón et al. 2007) yield accurate solutions for
the pile response, but may be seen as computationally intensive and time consuming, especially when
treating the three-dimensional problem. Rigorous analytical elastodynamic solutions (e.g., Pak &
Jennings 1987, Rajapakse & Shah 1987) have received much less attention due to the complexity and
sophistication in mathematical derivation, and focus on treating the soil as an elastic half-space. A
subgroup of analytical models, which are based on the pioneering work of Tajimi (Tajimi 1969), offer
approximate three-dimensional analytical solutions (e.g., Novak & Nogami 1977, Shadlou &
Bhattacharya 2014, Latini et al. 2015, Anoyatis et al. 2016) and have the advantage of treating the soil
as a layer instead of a half-space. In addition, such models can be further modified to consider soil
1Senior Lecturer, Civil & Environmental Engineering Division, Faculty of Environment and Technology,
University of the West of England - UWE Bristol, Bristol, UK, [email protected] 2Assistant Professor, Department of Civil & Environmental Engineering, University of California Irvine, Irvine
CA, US, [email protected]

2
inhomogeneity (Anoyatis 2013) and non-linearity (Akiyoshi 1981), yet not in a straightforward manner,
especially under lateral loading. In addition, Winkler type analytical solutions are among the most
appealing solutions in literature. Soil-pile interaction is modelled via a bed of uniformly distributed
independent Winkler springs and dashpots (or equivalently complex valued springs). Regarding
kinematic soil-pile interaction, various computational tools such as using rigorous finite element and
boundary element solutions and beam-on-dynamic-Winkler-foundation models are available to predict
the kinematic response of piles (e.g., Flores-Berrones & Whitman 1982, Dobry & O'Rourke 1983, Fan
et al. 1991, Makris & Gazetas 1992, Kavvadas & Gazetas 1993, Pender 1993, Mylonakis 2001a,
Nikolaou et al. 2001, Maiorano et al. 2009, Dezi et al. 2010, Di Laora et al. 2012, Anoyatis et al. 2013,
Di Laora et al. 2013, Liang et al. 2013, Kampitsis et al. 2013, Chidichimo et al. 2014, Di Laora &
Rovithis 2015).
As shown in detail above, the Winkler theory has been widely used in both inertial and kinematic
analysis of piles, yet its performance and accuracy depend on Winkler moduli. As presented in detail in
the original works of Anoyatis & Lemnitzer (2017a) and (2017b) a variety of Winkler moduli from
diverse studies have been proposed over the past decades for both inertially (e.g., Baranov 1967 - Novak
1974, Roesset 1980, Dobry et al. 1982, Mylonakis 2001b, Syngros 2004) and kinematically (e.g., Dobry
& O'Rourke 1983, Kavvadas & Gazetas 1993, Mylonakis, 2001a) stressed piles. This study focuses on
presenting a review of the available complex valued Winkler moduli and investigate their ability
(accuracy) to predict pile response under inertial and kinematic loading when implemented in a Winkler
model. The familiar dynamic plane strain modulus of Baranov-Novak was found to render such models
incapable of capturing resonant effects associated with dynamic pile head stiffness (drop at resonance)
and damping (“jump” at resonance), while a better performance was observed under kinematic loading.
In addition, Mylonakis’ (2001b) modulus significantly improved the performance of such models,
especially under inertial loading.
Finally, a set of closed from expressions for complex-valued Winkler moduli are presented. These
moduli are implemented in inertial (e.g., Mylonakis 1995) and kinematic (e.g., Anoyatis et al. 2013)
Winkler models and their performance in terms of predicting dynamic pile head stiffness and damping,
curvature ratios and kinematic response factors, is verified against comparisons with the more accurate
continuum elastodynamic model of Anoyatis & Lemnitzer (2017a) and rigorous finite element (Fan et
al 1991, Anoyatis et al. 2013) and boundary element (Liang et al. 2013) solutions from the literature.
Numerical results are presented in the following in dimensionless graphs.
1.2 Problem considered
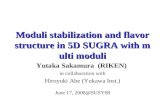
A solid cylindrical pile of diameter 𝑑 and length 𝐿 is embedded in a homogeneous soil layer. The
thickness of the layer 𝐻 is equal to the pile length (= 𝐿). Following a traditional dynamic Winkler model,
the pile is treated as a beam using the strength-of-materials theory and the dynamic soil-pile interaction
is modelled via complex-valued Winkler moduli (springs and dashpots) (Fig. 1). The pile is
characterized by its Young’s Modulus 𝐸𝑝 and mass density 𝜌𝑝, while the soil by its shear modulus 𝐺𝑠,
soil mass density 𝜌𝑠, Poisson’s ratio 𝜈𝑠 and hysteretic soil material damping 𝛽𝑠 expressed
mathematically through the complex valued shear modulus 𝐺𝑠∗ = 𝐺𝑠(1 + 2𝑖𝛽𝑠). Either form of
excitation [i.e., inertial (Fig. 1a) or kinematic (Fig. 1b)] is considered harmonic with 𝜔 being the
excitation frequency, 𝑡 the time and 𝑖 the familiar imaginary number. Perfect soil-pile interface contact
is assumed over the entire length of the pile.
1.2.1 Inertial problem
The pile is subjected to a lateral harmonic horizontal load 𝑃(𝜔, 𝑡) = 𝑃 𝑒𝑖𝜔𝑡 at its head (Fig. 1a) which
causes a harmonic horizontal pile displacement 𝑤 = 𝑤(𝑧, 𝑡) and a consequent harmonic motion of the
surrounding soil. The pile is assumed to be hinged at the tip (i.e. the pile tip is free to rotate only).
1.2.2 Kinematic problem
Due to the passage of vertically propagating harmonic shear waves (S-waves) in the soil medium lateral
harmonic pile motion is induced. The waves are simulated via a harmonic horizontal displacement

3
Figure 1. Geometry and soil-pile parameters considered; (a) inertial interaction, (b) kinematic interaction.
𝑢𝑔(𝜔) 𝑒𝑖𝜔𝑡 applied at the rock level (Fig. 1b). In the presence of the pile foundation the resulting motion
at the pile head differs from the free field at the surface (𝑢𝑓𝑓0(𝜔)𝑒𝑖𝜔𝑡) and can be expressed as
𝑤0(𝜔) 𝑒𝑖𝜔𝑡. Results for the specific conditions of a fixed-head free-tip pile are shown in the following.
1.3 Parameters in inertial and kinematic soil pile interaction
Regarding inertial soil-pile interaction results are presented in dimensionless graphs in terms of dynamic
pile head stiffness 𝐾 and damping ratio 𝜁. Dynamic pile stiffness can be expressed in complex form as
𝐾∗ = 𝐾(1 + 2𝑖𝜁), where the real part denotes the dynamic stiffness (frequency dependent spring, 𝐾 =𝑅𝑒(𝐾∗)) and the imaginary over twice the real part stands for the damping ratio ζ = 𝐼𝑚(𝐾∗)/2𝐾
(Anoyatis & Lemnitzer 2017a). In this work, results in terms of the stiffness and damping components
in swaying, 𝐾ℎℎ and 𝜁ℎℎ, are included.
With reference to kinematic soil-pile interaction, results are presented in terms of static and dynamic
pile-soil curvature ratios at the level of the pile head 𝐶𝑅0 and kinematic response factors in swaying and
rotation, 𝐼𝑢 and 𝐼𝜑. Expressions for all kinematic parameters can be found in Anoyatis et al. (2013).
2. EXISTING WINKLER MODULI
Reviews of static (frequency-independent) Winkler moduli (springs) and dynamic (frequency-
dependent) Winkler moduli available in literature have been presented in detail in previous works by
the Authors (Anoyatis & Lemnitzer 2017a, 2017b). Among such moduli, two main groups can be
distinguished: (i) frequency-independent moduli 𝑘 (e.g., Dobry et al. 1982, Makris & Gazetas 1992,
Kavvadas & Gazetas 1993), and (ii) frequency-dependent moduli (Baranov 1967 - Novak 1974,
Mylonakis 2001b). In the first group, expressions for springs are presented along with frequency-
dependent expressions for radiation damping. In the second group moduli are shown in complex-valued
forms (i.e., 𝑘∗ = 𝑘(1 + 2𝑖𝛽𝑠)), which inherently account for dynamic springs (real part, 𝑅𝑒(𝑘∗)) and
dashpots (imaginary part, 𝐼𝑚(𝑘∗)). The damping ratio 𝛽 (= 𝐼𝑚(𝑘∗) 2𝑘⁄ ) considers both hysteretic soil
material (𝛽𝑠) and radiation (𝛽𝑟) damping (i.e., 𝛽𝑠 + 𝛽𝑟) which is associated with the emergence of
travelling waves in the soil medium. In this work, only 𝑘∗ formulae from the literature are reported.
Baranov-Novak derived a 𝑘∗ considering an incompressible horizontal slice of the soil medium
(dynamic plane strain model), instead of taking into account the thickness of the soil layer (thus cannot
capture resonance effects). 𝑘∗ is mathematically expressed in terms of the modified second kind Bessel

4
functions of first and zero order, 𝐾1( ) and 𝐾0( ), respectively:
𝑘∗ = 𝜋 𝐺𝑠∗ 𝑠2
4𝐾1(𝑞)𝐾1(𝑠) + 𝑠𝐾1(𝑞)𝐾0(𝑠) + 𝑞𝐾0(𝑞)𝐾1(s)
𝑞𝐾0(𝑞)𝐾1(𝑠) + 𝑠𝐾1(𝑞)𝐾0(𝑠) + 𝑞𝑠𝐾0(𝑞)𝐾0(𝑠) (1a)
The frequency-dependent parameter 𝑠 and compressibility parameter 𝜂𝑠 are obtained as follows
𝑠 =𝑖 a0
2√1 + 2𝑖𝛽𝑠
, 𝑞 =𝑠
𝜂𝑠, 𝜂𝑠 = √
2(1 − 𝜈𝑠)
1 − 2𝜈𝑠 (1b, c, d)
where the latter parameter expresses the ratio of the P-wave to the S-wave propagation velocity in the
soil (𝜂𝑠 = 𝑉𝑝 ⁄ 𝑉𝑠) and is a function of the Poisson’s ratio (𝜈𝑠) only.
An additional expression for the complex-valued Winkler modulus 𝑘∗ which seems identical to the
Baranov-Novak equation was proposed by Mylonakis (2001b):
𝑘∗ = 𝜋 𝐺𝑠∗ 𝑠2
4𝐾1(𝑞)𝐾1(𝑠) + 𝑠𝐾1(𝑞)𝐾0(𝑠) + 𝑞𝐾0(𝑞)𝐾1(s)
𝑞𝐾0(𝑞)𝐾1(𝑠) + 𝑠𝐾1(𝑞)𝐾0(𝑠) + 𝑞𝑠𝐾0(𝑞)𝐾0(𝑠) (2a)
where
𝑠 =1
2√a𝑐𝑢𝑡𝑜𝑓𝑓
2 −a0
2
1 + 2𝑖𝛽𝑠, 𝑞 =
𝑠
𝜂𝑠, 𝜂𝑠 = √
2(1 − 𝜈𝑠)
1 − 2𝜈𝑠 , a𝑐𝑢𝑡𝑜𝑓𝑓 =
𝜋
2 (
𝐿
𝑑)
−1
(2b, c, d, e)
Unlike the plane strain model (Equations 1), Equations 2 ware derived considering a compressible
horizontal soil slice by considering the effect of the vertical normal stresses in the equilibrium equation.
This allows Mylonakis’ modulus to “see” the thickness of the soil layer and capture resonant effects.
This is achieved through the parameter 𝑠 (Equation 2b) which includes the cutoff frequency of the soil
layer (a𝑐𝑢𝑡𝑜𝑓𝑓).
The variation of the dynamic plane strain and Mylonakis’ (2001b) moduli with dimensionless frequency
a0 for a damped soil is shown in Figure 2. It is evident that the plane strain moduli 𝑘 and 𝛽 increase
with increasing frequency; the increase rate being higher at low frequencies. The results are compared
against moduli obtained from the more elaborate solution of Mylonakis (2001b) for selected values of
pile 𝐿/𝑑. Two distinct trends are observed for all 𝐿/𝑑’s: (i) dynamic stiffnesses 𝑘 decrease with
increasing frequency up to a threshold value (a𝑐𝑢𝑡𝑜𝑓𝑓), where 𝑘 attain their minimum values, and
increase monotonically with further increase in frequency; (ii) damping ratios 𝛽 are practically
independent of excitation frequency and equal to soil material damping up to resonance, where they
exhibit a jump (emergence of radiation damping 𝛽𝑟), and increase monotonically with further increase
in frequency. For frequencies a0 < a𝑐𝑢𝑡𝑜𝑓𝑓 the strong dependence of Mylonakis’ 𝑘 on 𝐿/𝑑 is observed.
For frequencies a0 > 0.4 curves from Mylonakis and the plane strain model, practically collapse in a
single master curve, as the conditions in the soil medium gradually transform to “plane strain”.
The dynamic Winkler springs and dashpots from Equations 1 and 2 are implemented in the Winkler
model to calculate dynamic pile head stiffness 𝐾ℎℎ and damping ratio 𝜁ℎℎ in swaying. The results are
shown in Figure 3 and are compared against those obtained from a 3D elastodynamic model proposed
by Anoyatis & Lemnitzer (2017a). It is observed that Winkler predictions using the dynamic plane strain
(Equations 1) and Mylonakis’ (Equations 2) moduli closely follow (slightly overestimate) the more
accurate solution for frequencies a0 > 0.5. The plane strain solution cannot capture the fluctuations of
the 𝐾ℎℎ and 𝜁ℎℎ due to effect of soil layer resonances, while the solution does not allow for the
computation of static pile head stiffness (exhibits an asymptotic behavior) as the plane strain solution
collapses at 𝜔 = 0. Mylonakis’ 𝑘 enables the capture of the stiffness drop and the damping increase

5
Figure 2. Variation of dynamic Winkler moduli with frequency (Equations 1, 2); 𝜈𝑠 = 0.4, 𝛽𝑠 = 0.05
Figure 3. Variation of pile stiffness and damping in swaying with frequency. Comparison of the Winkler model
using different k (Equations 1 and 2) with the 3D model; 𝜈𝑠 = 0.4, 𝐿/𝑑 = 20, 𝐸𝑝/𝐸𝑠 = 1000, 𝛽𝑠 = 0.05
associated with the first resonance, yet overestimating both stiffness reduction and damping increase.
This indicates the need of a new 𝑘 to better capture the behavior in the low frequency range.
3. PROPOSED WINKLER MODULI
3.1 Inertial soil-pile interaction
An improved simpler alternative to the expressions of Baranov-Novak and Mylonakis is shown below.
𝑘∗ = 𝜋 𝐺𝑠∗ 𝑠 (𝑠 + 4
𝐾1(𝑠)
𝐾0(𝑠)) (3a)
where

6
𝑠 = 1
2 (𝜂𝑠)𝜒√a𝑐𝑢𝑡𝑜𝑓𝑓
2 −a0
2
1 + 2𝑖𝛽𝑠, 𝜂𝑠 = √
2 − 𝜈𝑠
1 − 𝜈𝑠, 𝑎𝑐𝑢𝑡𝑜𝑓𝑓 =
𝜋
2 (
𝐿
𝑑)
−1
(3b, c, d)
Equation 3a (Anoyatis & Lemnitzer 2017a) is essentially an asymptotic form of the plane strain
expression (Equation 1a) by taking the limit of Poisson’s ratio 𝜈𝑠 to 0.5 (i.e., incompressible soil).
However, the parameter 𝑠 is replaced with the one obtained from the analytical model of Anoyatis et al.
(2016) using the first mode only (Equation 3b). This new parameter 𝑠 is different from the one in
Equation 2b as it includes a new compressibility parameter 𝜂𝑠 (Equation 3c) and a novel empirical
parameter 𝜒 to capture more accurately the effect of the Poisson’s ratio which has been initially removed
when taking the asymptotic form. Values for 𝜒 were proposed in Anoyatis et al. (2016) and are shown
in the Table 1.
Table 1: Empirical parameter 𝜒 as function of Poisson’s ratio 𝜈𝑠.
Poisson’s ratio 𝝂𝒔
0.1 0.2 0.3 0.4 0.5
χ 5 4 3 2 1
The Authors have observed that while the real part of Equation 3a (i.e., dynamic stiffness) works well
along the whole frequency range (0 < a0 < 1), the performance of the imaginary part (damping) can be
improved at high frequencies by adding an empirical term 𝑖 2.2 (a02 − a𝑐𝑢𝑡𝑜𝑓𝑓
2 )1/2
:
𝐼𝑚(𝑘∗) = 𝐼𝑚(�̅�∗ + 𝑖 2.2 (𝑎02 − 𝑎𝑐𝑢𝑡𝑜𝑓𝑓
2 ) 𝐺𝑠)1/2
, 𝑓𝑜𝑟 𝑎0 > 𝑎𝑐𝑢𝑡𝑜𝑓𝑓 (3e)
This modification allows the proposed damping to be in a better agreement with the Baranov-Novak
model, which can be seen as the benchmark solution, as plane strain conditions develop at high
frequencies.
Figure 4 presents results for dynamic pile head stiffness and damping ratio obtained from the more
accurate continuum model of Anoyatis & Lemnitzer (2017a) and from the Winkler model using existing
(Equations 2) and proposed (Equations 3) moduli. The frequency is normalized by the first resonant or
cutoff frequency of the soil layer and the dynamic pile head stiffness is normalized by its static value
(𝜔 = 0). Results from the Winkler model are found to be in very good agreement with the continuum
solution for frequencies up to a0 = 2 a𝑐𝑢𝑡𝑜𝑓𝑓 (Fig. 4a). The proposed 𝑘∗ can well capture the stiffness
drop and damping increase associated with the first resonance, which is of primary interest in
geotechnical earthquake engineering. In comparison with Mylonakis’ 𝑘, it is shown that the proposed
formulation yields more accurate results, especially for damping, since the study of Mylonakis focus on
short piles (𝐿/𝑑 < 10). However, both 𝑘’s do not allow the Winkler model to capture the effects of
higher modes. Figure 4b further evaluates the performance of the proposed expression (Equations 3) for
selected values of the soil material damping 𝛽𝑠. The results are found to be in very good agreement with
the model of Anoyatis & Lemnitzer for the range of frequencies examined. Note though, that the
proposed modulus 𝑘 in Equations 3 should be used for computing the pile head stiffness
attenuation/amplification ratio 𝐾/𝐾𝑠𝑡𝑎𝑡𝑖𝑐 only, as it does not yield accurate predictions for pure static
stiffness (𝜔 = 0).
3.2 Kinematic soil-pile interaction
The derivation of the kinematic Winkler modulus is based on a static simplified expression originally
proposed by Mylonakis (2001b). As the original expression is not applicable to dynamic conditions, the
following modifications have been employed (Anoyatis & Lemnitzer 2017b): the shear modulus 𝐺𝑠 is

7
Figure 4. Variation of normalized pile stiffness and damping in swaying with dimensionless frequency. (a)
comparison of the Winkler model using different 𝑘∗ (Equations 1 and 2) with a more accurate 3D model (𝛽𝑠 =0.05), (b) comparisons of the Winkler model (grey curves) using the proposed expression for 𝑘∗ (Equation 3)
with the more accurate continuum model; 𝜈𝑠 = 0.4, 𝐿/𝑑 = 20, 𝐸𝑝/𝐸𝑠 = 1000
following modifications have been employed (Anoyatis & Lemnitzer 2017b): the shear modulus 𝐺𝑠 is
replaced with the complex valued modulus 𝐺𝑠∗, and the original static parameter 𝑠 is substituted with a
frequency-dependent parameter. In this light, the following expressions are obtained:
𝑘∗ = 4 𝜋 𝜂𝑠
2 𝐺𝑠∗
ln(𝜂𝑠) + (1 + 𝜂𝑠2) [ln(2/𝑠) − 𝛾]
(4a)
In the above expression 𝛾 ≈ 0.577 is the Euler’s gamma and 𝑠 and 𝜂𝑠 are identical to Equations 2:
𝑠 =1
2 √𝑎𝑐𝑢𝑡𝑜𝑓𝑓
2 −𝑎0
2
1 + 2𝑖𝛽𝑠, 𝜂𝑠 = √
2(1 − 𝜈𝑠)
1 − 2𝜈𝑠 (4b, c)
Similar to the inertial modulus, while the real part of Equation 4a works well across a wide frequency
range (Anoyatis & Lemnitzer 2017b), the imaginary part requires an empirical modification identical to
that in Equation 3e for frequencies after resonance (a0 > a𝑐𝑢𝑡𝑜𝑓𝑓) to match the plane strain modulus:
𝐼𝑚(�̅�∗) = 𝐼𝑚 (𝑘∗ + 𝑖 2.2 (a02 − a𝑐𝑢𝑡𝑜𝑓𝑓
2 )1/2
𝐺𝑠) (4d)
Proposed Winkler moduli for inertial (Equations 3) and kinematic (Equations 4) soil pile interaction,
along with the plane strain modulus, are plotted against frequency for different pile slenderness ratios
(𝐿/𝑑) in Figure 5. The behavior is investigated separately in the low (0 ≤ a0 ≤ a𝑐𝑢𝑡𝑜𝑓𝑓) and high (a0 >
a𝑐𝑢𝑡𝑜𝑓𝑓) frequency range: (i) below resonance dynamic Winkler springs (𝑘) are normalized by their
static value (𝑘𝑠𝑡𝑎𝑡𝑖𝑐) and frequencies are normalized by the cutoff frequency; (ii) beyond resonance the
Winkler springs are normalized by the soil shear modulus 𝐺𝑠 and the frequencies are presented in the
form of an incremental dimensionless frequency term (Anoyatis & Mylonakis 2012).

8
Below cutoff frequency proposed 𝑘’s are practically identical and decrease with increasing frequency
and attain a minimum value at a0 = a𝑐𝑢𝑡𝑜𝑓𝑓. The effect of 𝐿/𝑑 on 𝑘/𝑘𝑠𝑡𝑎𝑡𝑖𝑐 becomes gradually
significant with increasing frequency up to the first resonance, and vanishes at higher frequencies as
curves from each method converge into a single curve. Note that in the high frequency range 𝑘 and 𝛽
are independent of 𝐿/𝑑 and the method used. With reference to damping ratio, it is practically unaffected
by frequency below resonance and equal to soil material damping. In the vicinity of the cutoff frequency,
an increase in damping is observed due to energy radiation as horizontally travelling waves form in the
soil. Beyond cutoff frequency damping increases monotonically with increasing frequency. The
proposed expression from Equations 4 shows slightly higher damping in the high frequency range
compared to the other solutions. From Figure 5 it is evident that the proposed expressions from
Equations 3 and 4 are practically identical in the low frequency range and high frequency ranges, and
in good agreement at resonance. This implies that both expressions can be used for predicting dynamic
pile head stiffness and damping (inertial soil-pile interaction) for which Equations 3 were derived.
Figure 5. Variation of the proposed and plane strain Winkler moduli with frequency; 𝛽𝑠 = 0.05
Following Anoyatis et al. (2013), for all kinematic results presented herein, the term associated with the
pile inertia in a Winkler model is neglected. In addition, complex valued moduli 𝑘∗, which integrate
stiffness and damping into one single expression, were implemented as shown to evaluate the dynamic
curvature ratios (Fig. 6b). However, kinematic response factors (Figs. 7) were computed using the real
part only (i.e., dynamic spring stiffness) and the imaginary part associated with damping was neglected.

9
Figures 6 show results for static and dynamic curvature ratios, respectively, for a fixed-head free-tip pile
(𝐶𝑅0) and two selected values of pile-soil stiffness ratios (𝐸𝑝/𝐸𝑠). Predictions from a Winkler model
using the proposed expression for kinematic analysis along with the one previously introduced for
inertial analysis are compared against results obtained from a rigorous finite element solution (Anoyatis
et al. 2013). As shown in Figure 6a the static curvature ratio is well captured by the proposed kinematic
expression and performs slightly better than the inertial one for all 𝐿 ⁄ 𝑑’s and 𝐸𝑝/𝐸𝑠’s. With reference
to dynamic curvature (Fig. 6b), the proposed expressions can capture the drop at resonance. However,
under-predict the magnitude of the curvature ratio for 𝐸𝑝/𝐸𝑠 = 1000, and over-predict it for 𝐸𝑝/𝐸𝑠 =
10000. Nevertheless, these expressions still offer a significant improvement over a variety of existing
expressions from the literature (Anoyatis & Lemnitzer 2017b).
Figures 7 present results in terms of the kinematic response factors in translation and rotation, 𝐼𝑢 and
𝐼𝜑, respectively, for free-head free-tip piles of 𝐿 ⁄ 𝑑 = 20 embedded in a damped soil medium (𝛽𝑠 =
0.05). In both sub-figures 7a and 7b, the finite element results from Fan et al. (1991) and the boundary
element results from Liang et al. (2013) serve as reference solutions. Results obtained using the proposed
expressions practically collapse into a single curve for all frequencies examined. Regarding the 𝐼𝑢,
proposed 𝑘’s are shown to be in very good agreement with the finite element solution for frequencies
Figure 6. (a) Effect of pile slenderness on static curvature ratio at the pile head, (b) Variation of the dynamic
curvature ratio at the pile head with frequency (𝐿/𝑑 = 5, 𝛽𝑠 = 0.10); Comparisons of the Winkler model using
the proposed moduli with finite element results from Anoyatis et al. (2013) for a fixed-head free-tip pile.
Figure 7. (a) Variation of the kinematic response factor in translation with frequency, (b) Variation of the
kinematic response factor in rotation with frequency. Comparisons of the Winkler model using the proposed and
existing moduli with rigorous solutions from the literature for a fixed-head free-tip pile; 𝐿/𝑑 = 20, 𝛽𝑠 = 0.05,
𝐸𝑝/𝐸𝑠 = 1000.

10
a0 < 0.2, while for the 𝐼𝜑 their very good performance is extended to a broader frequency range (a0 <
0.35). Note that results obtained using the new moduli are implemented in a Winkler model where the
familiar parameter 𝜆 (e.g., Anoyatis et al. 2013) is included in its “static” form (neglecting the dashpot).
4. CONCLUSIONS
The suitability of existing and proposed complex valued Winkler moduli to predict the response of
inertially and kinematically stressed piles using a traditional Winkler model is investigated in this study.
Performance is assessed in terms of pile head stiffness and damping (inertial loading), static and dynamic
pile-soil curvature ratios and kinematic response factors in translation and rotation (kinematic loading).
The main findings of the study as well as additional comments are shown below:
1. The dynamic plane strain modulus collapses at 𝜔 = 0 and renders Winkler models incapable of
capturing the drop in dynamic curvature ratio, the drop in dynamic pile head stiffness and increase
in damping ratio at resonance. Mylonakis’ (2001b) modulus along with the proposed moduli, can
capture the aforementioned resonant effects and are stable at 𝜔 = 0.
2. A relatively simple expression for an inertial Winkler modulus 𝑘∗ is introduced. This expression is
derived from the classic dynamic plane strain modulus by taking the limit of Poisson’s ratio to 0.5
and is further modified to include a resonance-dependent parameter borrowed from the continuum
elastodynamic model of Anoyatis & Lemnitzer (2017a), as well as an empirical parameter to re-
account for Poisson’s ratio (Anoyatis et al. 2016).
3. A Winkler model using the proposed inertial 𝑘∗ can faithfully predict normalized dynamic pile
head stiffness and corresponding damping ratios in swaying (i.e., 𝐾ℎℎ, 𝜁ℎℎ) for frequencies 0 ≤a0 ≤ 2 a𝑐𝑢𝑡𝑜𝑓𝑓. Note that the strength of the proposed formulation lies in its dynamic application
(𝐾/𝐾𝑠𝑡𝑎𝑡𝑖𝑐) and its use for calculating either purely static (𝜔 = 0) or purely dynamic stiffnesses is
not suggested. The performance of the model in predicting stiffness and damping components in
rotation and cross rotation-swaying was investigated in Anoyatis & Lemnitzer (2017a).
4. A simple logarithmic based expression for a kinematic Winkler modulus 𝑘∗ is introduced. The
proposed expression is formulated on the basis of Mylonakis’ (2001b) expression which was
derived for static conditions and modified accordingly to account for dynamic loading including a
frequency- and resonance-dependent parameter. This expression offers a simple alternative over
available complex valued expressions as no Bessel functions are included and results can be
evaluated via a calculator using equivalent expressions which account separately for dynamic
stiffness spring 𝑘 and damping 𝛽 as shown in Anoyatis & Lemnitzer (2017b).
5. Proposed kinematic 𝑘∗ offers very good predictions for static and dynamic curvature ratios
examined. Regarding the latter term, 𝑘’s strength lies in capturing the curvature drop at resonance,
yet its use is encouraged for calculating the dynamic curvature attenuation 𝐶𝑅0/𝐶𝑅𝑠𝑡𝑎𝑡𝑖𝑐 and not
the purely dynamic curvature ratio. Very good performance is also observed for evaluating the
kinematic response factors 𝐼𝑢 and 𝐼𝜑, particularly for frequencies 0 ≤ 𝑎 ≲ 0.30. Following
Anoyatis et al. (2013) where the familiar static Winkler parameter 𝜆 is used throughout the dynamic
analysis, this is achieved herein by implementing the real part of the complex modulus only (i.e.,
dynamic spring stiffness only) and neglecting the dashpot.
6. Besides its kinematic application, the versatility of the new kinematic modulus allows it to be
implemented in a Winkler model to predict pile head stiffnesses and damping (inertial problem).
All other kinematic expressions (usually frequency-independent) from the literature are limited by
their unique application to the kinematic problem, meaning such expressions will yield erroneous
results under inertial loading (Anoyatis & Lemnitzer 2017a)
7. Following Anoyatis et al. (2013), for all kinematic results presented herein, the term associated
with the pile inertia in the familiar Winkler parameter 𝜆 is neglected. This improves the
performance of the kinematic Winkler model.
8. As opposed to inertial soil-pile interaction, kinematic analysis is less sensitive to the selection of 𝑘,
except for curvature ratios for short piles (𝐿/𝑑 = 5).

11
9. Complex valued moduli that integrate stiffness and damping into one single expression were
implemented as published to evaluate the dynamic curvature ratios at the pile head and pile tip. The
kinematic response factors were computed using the real part only (i.e., dynamic spring stiffness)
and the imaginary part associated with the damping was neglected.
10. The plane strain parameter modulus can be viewed as a special case of Mylonakis and the proposed
moduli when setting the cutoff frequency equal to zero, hereby representing an infinitely long pile
embedded in a half-space.
5. REFERENCES
Akiyoshi T (1981). Soil-pile interaction in vertical vibration induced through a frictional interface. Earthquake
Engineering & Structural Dynamics, 10(1): 135-148.
Anoyatis G, Di Laora R, Mandolini A, Mylonakis G (2013). Kinematic response of single piles for different
boundary conditions: Analytical solutions and normalization schemes. Soil Dynamics and Earthquake
Engineering, 44: 183-195.
Anoyatis G (2013). Contribution to kinematic and inertial analysis of piles by analytical and experimental methods.
PhD Thesis, University of Patras, Rio, Greece.
Anoyatis G, Mylonakis G (2012). Dynamic Winkler modulus for axially loaded piles. Géotechnique, 62(6): 521-
536.
Anoyatis G, Mylonakis G, Lemnitzer A (2016). Soil resistance to lateral harmonic pile motion. Soil Dynamics and
Earthquake Engineering, 87: 164-179.
Anoyatis G, Lemnitzer A (2017a). Dynamic pile impedances for laterally–loaded piles using improved Tajimi and
Winkler formulations. Soil Dynamics and Earthquake Engineering, 92: 279-297.
Anoyatis G, Lemnitzer A (2017b). Kinematic Winkler modulus for laterally-loaded piles. Soils and Foundations.
57(3): 453-471
Baranov VA (1967). On the calculation of excited vibrations of an embedded foundation (in Russian), No. 14,
Polytech. Inst. Riga, pp. 195-209: Voprosy Dynamiki Prochnocti.
Blaney GW, Kausel E, Roesset JM (1976). Dynamic stiffness of piles. Blacksburg, Virginia, Proc. 2nd
International Conference on Numerical Methods in Geomechanics, 1001-1012.
Chidichimo A, Cairo R, Dente G, Taylor CA, Mylonakis G (2014). 1-g experimental investigation of bi-layer soil
response and kinematic pile bending. Soil Dynamics and Earthquake Engineering, 67: 219-232.
Dezi F, Carbonari S, Leoni G (2010). Kinematic bending moments in pile foundations. Soil Dynamics and
Earthquake Engineering, 30(3): 119-132.
Di Laora R, Mandolini A, Mylonakis G (2012). Insight on kinematic bending of flexible piles in layered soil. Soil
Dynamics and Earthquake Engineering, 43: 309-322.
Di Laora R, Mylonakis G, Mandolini A (2013). Pile-head kinematic bending in layered soil. Earthquake
Engineering & Structural Dynamics, 42(3): 319-337.
Di Laora R, Rovithis E (2015). Kinematic bending of fixed-head piles in nonhomogeneous soil. Journal of
Geotechnical and Geoenvironmental Engineering, 141(4):04014126.
Dobry R, O'Rourke MJ (1983). Discussion on seismic response of end-bearing piles by Flores-Berrones and
Whitman R V J. Journal of Geotechnical Engineering, 109(5): 778-781.
Dobry R, Vicente E, O’Rourke M, Roesset JM (1982). Horizontal stiffness and damping of single piles. Journal
of Geotechnical and Geoenvironmental Engineering ASCE, 108(3): 439-459.
El-Marsafawi H, Kaynia AM, Novak M (1992).Interaction factors and the superposition method for pile group
dynamic analysis. Report GEOT192, Geotechnical Research Center, The University of Western Ontario.
Fan K, Gazetas G, Kaynia A, Kausel E, Ahmad S (1991). Kinematic seismic response of single piles and pile
groups. Journal of Geotechnical Engineering, 117(12): 1860-1879.

12
Flores-Berrones R, Whitman R (1982). Seismic response of end-bearing piles. Journal of the Geotechnical
Engineering Division, 108(GT4): 554-569.
Kampitsis AE, Sapountzakis EJ, Giannakos SK, Gerolymos NA (2013). Seismic soil-pile-structure kinematic and
inertial interaction - A new beam approach. Soil Dynamics and Earthquake Engineering, 55: 211-224.
Kavvadas M, Gazetas G (1993). Kinematic seismic response and bending of free-head piles in layered soil.
Géotechnique, 43(2): 207-222.
Kaynia AM, Kausel E (1982). Dynamic stiffness and seismic response of pile groups, Research Report R82-03,
Cambridge., MA: Massachusetts Institute of Technology.
Latini C, Zania V and Johannesson B (2015). Dynamic stiffness and damping of foundations for jacket structures.
6th International Conference on Earthquake Geotechnical Engineering, Christchurch, New Zealand.
Liang F, Chen H, Guo, WD (2013). Simplified boundary element method for kinematic response of single piles in
two-layer soil. Journal of Applied Mathematics, 2013: 1-12.
Maiorano RMS, de Sanctis L, Aversa S, Mandolini A (2009). Kinematic response analysis of piled foundations
under seismic excitation. Canadian Geotechnical Journal, 46(5): 571-584.
Makris N, Gazetas G (1992). Dynamic pile-soil-pile interaction. Part II: Lateral and seismic response. Earthquake
Engineering and Structural Dynamics, 21(2): 145-162.
Mylonakis (1995). Contributions to Static and Dynamic Analysis of Piles and Pile-Supported Bridge Piers, Ph.D
thesis, State University of New York at Buffalo.
Mylonakis G (2001a). Simplified model for seismic pile bending at soil layer interfaces. Soils and Foundations,
41(4):47-58.
Mylonakis G (2001b). Elastodynamic model for large-diameter end-bearing shafts. Journal of the Japanese
Geotechnical Society: soils and foundation, 41(3):31-44.
Nikolaou S, Mylonakis G, Gazetas G, Tazoh T (2001). Kinematic pile bending during earthquakes: analysis and
field measurements. Géotechnique, 51(5):425-440.
Novak M (1974). Dynamic stiffness and damping of piles. Canadian Geotechnical Journal, 11(4):574-598.
Novak M, Nogami T (1977). Soil-pile interaction in horizontal vibration. Earthquake Engineering & Structural
Dynamics, 5(3): 263-281.
Novak M, Aboul-Ella F, Nogami T (1978). Dynamic soil reactions for plane strain case. Journal of the Engineering
Mechanics Division, 104(4): 953-959.
Pak RYS and Jennings PC (1987). Elastodynamic Response of Piles Under Transverse Excitations. Journal of
Engineering Mechanics, 113(7): 1101-1116.
Padrón LA, Aznárez JJ and Maeso O (2007). BEM-FEM coupling model for the dynamic analysis of piles and
pile groups. Engineering Analysis with Boundary Elements, 31(6): 473-484.
Pender M (1993). Seismic pile foundation design analysis. Bulletin of the New Zealand National Society for
Earthquake Engineering, 26(1):49-160.
Rajapakse RKND and Shah AH (1987), On the lateral harmonic motion of an elastic bar embedded in an elastic
half-space. International Journal of Solids and Structures, 23(2): 287-303.
Roesset JM and Angelides D (1980). Dynamic stiffness of piles, in International Conference on Numerical
Methods in Offshore Piling, Institution of Civil Engineers (ICE), London.
Tajimi H (1969). Dynamic analysis of a structure embedded in an elastic stratum. 4th World Conference on
Earthquake Engineering, Santiago, Chile.
Sen R, Davies TG and Banerjee PK (1985). Dynamic analysis of piles and pile groups embedded in homogeneous
soils. Earthquake Engineering & Structural Dynamics, 13(1): 53-65.
Shadlou M and Bhattacharya S (2014). Dynamic stiffness of pile in a layered elastic continuum. Géotechnique,
64(4): 303-319.
Syngros C (2004). Seismic Response of piles and pile-supported bridge piers evaluated through case histories.
PhD thesis, City University of New York.