Research on Offshore Foundations: Papers at the International … · 2013. 7. 29. · Abstract:...
58
Research on Offshore Foundations: Papers at the International Symposium on Frontiers in Offshore Geotechnics Perth, Australia, 2005 by G.T. Houlsby, C.M. Martin, B.W. Byrne, R.B. Kelly E.J. Hazell, L. Nguyen-Sy, F.A. Villalobos and L-B. Ibsen Report No. OUEL 2275/05 University of Oxford Department of Engineering Science Parks Road, Oxford, OX1 3PJ, U.K. Tel. 01865 273162/283300 Fax. 01865 283301 Email [email protected] http://www-civil.eng.ox.ac.uk/
Transcript of Research on Offshore Foundations: Papers at the International … · 2013. 7. 29. · Abstract:...
-
Research on Offshore Foundations:
Papers at the International Symposium on Frontiers in Offshore Geotechnics Perth, Australia, 2005
by
G.T. Houlsby, C.M. Martin, B.W. Byrne, R.B. Kelly E.J. Hazell, L. Nguyen-Sy, F.A. Villalobos and L-B. Ibsen
Report No. OUEL 2275/05
University of Oxford Department of Engineering Science Parks Road, Oxford, OX1 3PJ, U.K.
Tel. 01865 273162/283300
Fax. 01865 283301 Email [email protected]
http://www-civil.eng.ox.ac.uk/
-
Research on Offshore Foundations: Papers at the International Symposium on Frontiers in Offshore Geotechnics
Perth, Australia, 2005
G.T. Houlsby, C.M. Martin, B.W. Byrne, R.B. Kelly E.J. Hazell, L. Nguyen-Sy, F.A. Villalobos and L-B. Ibsen
This report consists of six papers that have been accepted for the International Symposium on Frontiers in Offshore Geotechnics at Perth Australia in September 2005. The abstracts of the six papers are: a) Keynote Paper : “Suction caissons for wind turbines.” Authors: Houlsby, G.T., Ibsen, L-B. and Byrne, B.W. Abstract: Suction caissons may be used in the future as the foundations for offshore wind turbines. We review recent research work on the development of design methods for suction caissons for these applications. We give some attention to installation, but concentrate on design for in-service performance. Whilst much can be learned from previous offshore experience, the wind turbine problem poses the particularly challenging combination of a relatively light structure, with large imposed horizontal forces and overturning moments. Monopod or tripod/tetrapod foundations result in very different loading regimes on the foundations, and we consider both cases. The results of laboratory studies and field trials are reported. We also outline briefly numerical and theoretical work that is relevant. Extensive references are given to sources of further information. b) “Bearing capacity of parallel strip footings on non-homogeneous clay.” Authors: Martin, C.M. and Hazell, E.J. Abstract: On soft seabed soils, subsea equipment installations are often supported by mudmat foundation systems that can be idealised as parallel strip footings, grillages, or annular (ring-shaped) footings. This paper presents some theoretical results for the bearing capacity of (a) two parallel strip footings, otherwise isolated; (b) a long series of parallel strip footings at equal spacings. The soil is idealised as an isotropic Tresca material possessing a linear increase of undrained strength with depth. The bearing capacity analyses are performed using the method of characteristics, and the trends of these (possibly exact) results are verified by a companion series of upper bound calculations based on simple mechanisms. Parameters of interest are the footing spacing, the relative rate of increase of strength with depth, and the footing roughness. An application of the results to the design of perforated mudmats is discussed. c) “Investigating six degree-of-freedom loading on shallow foundations.” Authors: Byrne, B.W. and Houlsby, G.T. Abstract: Previous laboratory studies of the response of shallow foundations have only considered planar loading. This paper describes the development of a loading device capable of applying general loading on model shallow foundations. Loading involving all six degrees of freedom {vertical (V), horizontal (H2, H3), torsion (Q) and overturning moment (M2, M3)}, can be applied experimentally to the model foundations. Aspects of the design, including the loading rig configuration, development of a six degree-of-freedom load cell, numerical control algorithms and an accurate displacement measuring system are described. Finally results from initial experiments are presented that provide evidence for the generalisation of existing work-hardening plasticity models from planar loading to the general loading condition.
-
d) “The tensile capacity of suction caissons in sand under rapid loading.” Authors: Houlsby, G.T., Kelly, R.B. and Byrne, B.W. Abstract: We develop here a simplified theory for predicting the capacity of a suction caisson in sand, when it is subjected to rapid tensile loading. The capacity is found to be determined principally by the rate of pullout (relative to the permeability of the sand), and by the ambient pore pressure (which determines whether or not the water cavitates beneath the caisson). The calculation procedure depends on first predicting the suction beneath the caisson lid, and then further calculating the tensile load. The method is based on similar principles to a previously published method for suction-assisted caisson installation (Houlsby and Byrne, 2005). In the analysis a number of different cases are identified, and successful comparisons with experimental data are achieved for cases in which the pore water either does or does not cavitate. e) “Theoretical modelling of a suction caisson foundation using hyperplasticity theory.” Authors: Nguyen-Sy, L. and Houlsby, G.T. Abstract: A theoretical model for the analysis of suction caison foundations, based on a thermodynamic framework (Houlsby and Puzrin, 2000) and the macro-element concept is presented. The elastic-plastic response is first described in terms of a single-yield-surface model, using a non-associated flow rule. To capture hysteresis phenomena, this model is then extended to a multiple yield surface model. The installation of the caisson using suction is also analysed as part of the theoretical model. Some preliminary numerical results are given as demonstrations of the capabilities of the model.. f) “Moment loading of caissons installed in saturated sand.” Authors: Villalobos, F.A., Byrne, B.W. and Houlsby, G.T. Abstract: A series of moment capacity tests have been carried out at model scale, to investigate the effects of different installation procedures on the response of suction caisson foundations in sand. Two caissons of different diameters and wall thicknesses, but similar skirt length to diameter ratio, have been tested in water-saturated dense sand. The caissons were installed either by pushing or by using suction. It was found that the moment resistance depends on the method of installation.
-
1. INTRODUCTION The purpose of this paper is to review recent research work on the design of suction caisson foundations for offshore wind turbines. Most of the relevant work has been conducted at, or in co-operation with, the universities of Oxford and Aalborg, so we report here mainly the work of our own research groups.
Suction caissons have been extensively used as anchors, principally in clays, and have also been used as foundations for a small number of offshore platforms in the North Sea. They are currently being considered as possible foundations for offshore wind turbines. As discussed by Houlsby and Byrne (2000) and by Byrne and Houlsby (2003), it is important to realise that the loading regimes on offshore turbines differ in several respects from those on structures usually encountered in the offshore oil and gas industry. Firstly the structures are likely to be founded in much shallower water: 10m to 20m is typical of the early developments, although deeper water applications are already being planned. Typically the structures are relatively light, with a mass of say 600t (vertical deadload 6MN), but in proportion to the vertical load the horizontal loads and overturning moments are large. For instance the horizontal load under extreme conditions may be about 60% of the vertical load.
An important consideration is that, unlike the oil and gas industry where large one-off structures
dominate, many relatively small and inexpensive foundations are required for a wind farm development, which might involve anything from 30 to 250 turbines.
The dominant device used for large scale wind power generation is a horizontal axis, 3-bladed
Suction Caissons for Wind Turbines
Guy T. Houlsby1, Lars Bo Ibsen2 & Byron W. Byrne1 1: Department of Engineering Science, Oxford University, U.K. 2: Department of Civil Engineering, Aalborg University, Denmark
ABSTRACT: Suction caissons may be used in the future as the foundations for offshore wind turbines. We review recent research on the development of design methods for suction caissons for these applications. We give some attention to installation, but concentrate on design for in-service performance. Whilst much can be learned from previous offshore experience, the wind turbine problem poses a particularly challenging combination of a relatively light structure, with large imposed horizontal forces and overturning moments. Monopod or tripod/tetrapod foundations result in very different loading regimes on the foundations, and we consider both cases. The results of laboratory studies and field trials are reported. We also outline briefly relevant numerical and theoretical work. Extensive references are given to sources of further information.
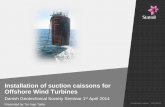
Figure 1: Offshore tests in Frederikshavn, Denmark. Front: Vestas V90 3.0MW turbine. Back: Nordex 2.3MW turbine.
-
turbine with the blades upwind of the tower, as shown in Figure 1. The details of the generator, rotational speed and blade pitch control vary between designs. Most offshore turbines installed to date generate 2MW rated power, and typically have a rotor about 80m in diameter with a hub about 80m above mean sea level. The size of turbines available is increasing rapidly, and prototypes of 5MW turbines already exist. These involve a rotor of about 128m diameter at a hub height of about 100m. The loads on a “typical” 3.5MW turbine are shown in Figure 2, which is intended to give no more than a broad indication of the magnitude of the problem.
Figure 2: Typical loads on a 3.5MW offshore wind turbine
Note that in conditions as might be encountered
in the North Sea, the horizontal load from waves (say 3MN) is significantly larger than that from the wind (say 1MN). However, because the latter acts at a much higher point (say 90m above the foundation) it provides more of the overturning moment than the wave loading, which may only act at say 10m above the foundation. Using these figures the overturning moment of 120MNm would divide as 90MNm due to wind and 30MNm due to waves.
Realistic combinations of loads need to be considered. For instance the maximum thrust on the turbine occurs when it is generating at the maximum allowable wind speed for generation (say 25m/s). At higher wind speeds the blades will be feathered and provide much less wind resistance. It is thus unlikely that the maximum storm wave loading would occur
at the same time as maximum thrust. Turbine designers must also consider important load cases such as emergency braking. It is important to recognise that the design of a turbine foundation is not usually governed by considerations of ultimate capacity, but is typically dominated by (a) considerations of stiffness of the foundation and (b) performance under fatigue loading.
An operational wind turbine is subjected to harmonic excitation from the rotor. The rotor's rotational frequency is the first excitation frequency and is commonly referred to as 1P. The second excitation frequency to consider is the blade passing frequency, often called 3P (for a three-bladed wind turbine) at three times the 1P frequency.
Figure 3 shows a representative frequency plot of a selection of measured displacements for the Vestas V90 3.0MW wind turbine in operational mode. The foundation is a suction caisson. The measured data, monitoring system and “Output-Only Modal Analysis” used to establish the frequency plot are described in Ibsen and Liingaard (2005). The first mode of the structure is estimated, and corresponds to the frequency observed from idling conditions. The peak to the left of the first natural frequency is the forced vibration from the rotor at 1P. To the right of the first natural frequency is the 3P frequency. It should be noted that the 1P and 3P frequencies in general cover frequency bands and not just two particular values, because the Vestas wind turbine is a variable speed device.
To avoid resonances in the structure at the key excitation frequencies (1P, 3P) the structural designer needs to know the stiffness of the foundation with some confidence, this means that problems of deformation and stiffness are as important as capacity. Furthermore, much of the structural design is dictated by considerations of high cycle fatigue (up to about 108 cycles), and the foundation too must be designed for these conditions.
2. CASES FOR STUDY
The two main problems that need to be studied in design of a suction caisson as a foundation are:
• installation; • in service performance.
In this review we shall discuss installation methods briefly, but shall concentrate mainly on design for in service performance. The relevant studies involve techniques as diverse as laboratory model testing, centrifuge model testing, field trials at reduced scale, and a full-scale field installation.
-
Complementing these experiments are numerical studies using finite element techniques, and the development of plasticity-based models to represent the foundation behaviour.
Suction caissons may be installed in a variety of soils, but we shall consider here two somewhat idealised cases: a caisson installed either in clay, which may be treated as undrained, or in sand. For typical sands the combination of permeability value, size of caisson and loading rates leads to partially drained conditions, although much of the testing we shall report is under fully drained conditions. In this paper we report mainly work on sands.
We shall consider two significantly different loading regimes, which depend on the nature of the structure supporting the wind turbine. Most offshore wind turbines to date have been supported on a “monopile” – a single large diameter pile, which in effect is a direct extension of the tubular steel tower which supports the turbine. Some turbines have been supported on circular gravity bases. An obvious alternative is to use a single suction caisson to support the turbine, and we shall call this a “monopod” foundation, Figure 4(a). The monopod resists the overturning moment (usually the most important loading component) directly by its rotational fixity in the seabed.
As turbines become larger, monopod designs may become sufficiently large to be uneconomic, and an alternative is a structure founded on three or four smaller foundations: a “tripod” or “tetrapod”, Figure
4(b). In either of these configurations the overturning moment on the structure is resisted principally by “push-pull” action of opposing vertical loads on the upwind and downwind foundations. Alternatives using asymmetric designs of tripod, and those employing “jacket” type substructures are also under consideration.
(a) (b) Figure 4: caisson foundations for a wind turbine, (a) monopod, (b) tripod/tetrapod
1-100
-80
-60
-40
-20
0
20
Frequency Domain Decomposition - Peak PickingAverage of the Normalized Singular Values of
Spectral Density Matrices of all Data Sets.dB | 1.0 / Hz
Frequency
First mode3P
1P
Figure 3. Frequency plot of measured displacements for a wind turbine in operational mode.
-
3. NORMALISATION PROCEDURES
A number of studies have been conducted at different scales and it is necessary to compare the results from these various studies. To do this it is appropriate to normalise all the results so that they can be represented in non-dimensional form. This procedure also allows more confident extrapolation to full scale.
The geometry of a caisson is shown in Figure 5. The outside radius is R (diameter oD ), skirt length is L and wall thickness t. In practice caissons may also involve stiffeners on the inside of the caisson, these being necessary to prevent buckling instability during suction installation, but we ignore these in a simplified analysis. Geometric similarity is achieved by requiring similar values of RL 2 and Rt 2 .
Figure 5: Geometry of a caisson foundation
Figure 6: Loading and displacement conventions for a caisson foundation (displacements exaggerated).
The sign convention for applied loads and
displacements is shown in Figure 6. The rotation of the caisson θ is already
dimensionless, and we normalise the displacements simply by dividing by the caisson diameter, to give
Rw 2 and Ru 2 .
In sand it is straightforward to show that, for similar values of dimensionless bearing capacity factor, the loads at failure would be proportional to γ′ and to 3R . We therefore normalise vertical and
horizontal loads as γ′π 32 RV and γ′π 32 RH , where we have included the factor π2 to give the normalisation factor a simple physical meaning: it is the effective weight of a cylinder of soil of the same diameter of the caisson, and depth equal to the diameter. In a similar way we normalise the overturning moment as γ′π 44 RM .
Use of the above normalisation is appropriate for comparing tests in sands with similar angles of friction and dilation. We recognise that these angles both decrease slightly with pressure and increase rapidly with Relative Density (Bolton, 1986). This means that comparable tests at smaller scales (and therefore lower stress levels) will need to be at lower Relative Densities to be comparable with field tests.
In clay the vertical capacity is proportional to a representative undrained shear strength us and to
2R , so we normalise loads as usRV2π and
usRH2π , and the moment as usRM
32π . In order to be comparable, tests at different scales
will need the profile of undrained strength with depth to be similar. If the strength profile is fitted by a simple straight-line fit zss uou ρ+= , then this requires similar values of the factor uosRρ2 .
Scaling of results using the above methods should give satisfactory results in terms of capacity. For clays it should also lead to satisfactory comparisons in terms of stiffness, provided that the clays being compared have similar values of ur sGI = . This condition is usually satisfied if the clays are of similar composition and overconsolidation ratio. For sands, however, an extra consideration needs to be taken into account. The shear modulus of a sand does not increase in proportion to the stress level, but instead can reasonably be expressed by:
n
aa ppg
pG
⎟⎟⎠
⎞⎜⎜⎝
⎛ ′= (1)
where g and n are dimensionless constants, and ap is atmospheric pressure (used as a reference pressure). The value of n is typically about 0.5, so that the stiffness is proportional roughly to the square root of pressure.
-
Comparing rotational stiffnesses on the basis of a plot of γ′π 44 RM against θ effectively makes the assumption that the shear stiffness is proportional to
γ′R2 , which may be regarded as a representative stress level. Since in fact the stiffness increases at a lower rate with stress level, this comparison will result in larger scale tests giving lower apparent normalised stiffness. This effect can be reduced by multiplying the θ scale by the dimensionless factor ( ) na Rp −γ′ 12 , which compensates for the stiffness variation with stress level.
Thus we recommend that to compare both stiffness and capacity data for sands one should plot
γ′π 44 RM against ( ) 5.02 γ′θ Rpa (assuming 5.0=n ) for moment tests, and γ′π 32 RV against
( )( ) 5.022 γ′RpRw a for vertical loading tests. A fuller description of these normalisation procedures is given by Kelly et al. (2005a).
4. INSTALLATION STUDIES
The principal difference between installation of a suction caisson for an offshore wind turbine and for previous applications is that the turbines are likely to be installed in much shallower water. There is a popular misconception that suction caissons can only be installed in deep water, where a very substantial head difference can be established across the lid of the caisson. In shallow water the net suction that can be achieved is indeed much smaller (being limited by the efficiency of the pumps, as the absolute pressure approaches zero), but the suctions that can be achieved are nevertheless sufficient for installation in most circumstances. Only in stiff clays is it likely that some possible caisson designs, which might otherwise be suitable as far as in-service conditions are concerned, could not be installed by suction in shallow water.
In Table 1 we list the main instances where caissons have been installed in shallow water, as appropriate to wind turbine installations. The water depths wh are approximate only. In addition to the field tests listed, a large number of small scale model tests of installation have been carried out at Oxford University (on caissons of 0.1m to 0.4m diameter), the University of Western Australia (UWA), Aalborg and elsewhere.
The largest completed installation in shallow water is that of a prototype suction caisson, shown in Figure 7, installed in the offshore research test facility in Frederikshavn, Denmark. The prototype
has a diameter of 12m and a skirt length of 6m. The operational water depth is 4m, and as the site is in a basin, no wave or ice loads are applied. As seen in Figure 7 the suction caisson was installed in only 1m of water in the basin. The steel construction has a mass of approximately 140t, and the caisson was placed in late October 2002. The installation period
Table 1: Installations in shallow water
Site Soil wh(m)
D (m)
L (m) Ref.
Wilhelmshaven Sand 6.0 16.0 15.0 Installation April 2005 Frederikshavn Sand 1.0 12.0 6.0 30
Frederikshavn Sand 0.2 2.0 4.0
2.0 4.0
-
Sandy Haven Sand 0.5 4.0 2.5 23 Tenby Sand 2.0 2.0 2.0 23 Burry Port Sand 0.5 2.0 2.0 -
Luce Bay Sand 0.2 3.0 1.5 1.5 1.0 27
Bothkennar Clay 0.2 3.0 1.5
1.5 1.0
26
(a)
(b)
Figure 7: Installation of the prototype foundation at the test site in Frederikshavn: (a) during installation, (b) at the end of installation.
-
was about 12 hours, with the soil penetration time being 6 hours. A computer system was used to control the inclination, suction pressure and penetration rate. Det Norske Veritas (DNV) has certified the design of the prototype in Frederikshavn to B level. The Vestas V90 3.0MW turbine was erected on the foundation in December 2002. The development of the design procedure for the bucket foundation is described in Ibsen and Brincker (2004). An even larger installation is currently in progress at Wilhelmshaven, Denmark.
There are two main ways of predicting firstly the self-weight penetration of the caisson and secondly the suction required to achieve full installation. The first method (Houlsby and Byrne, 2005a,b) involves use of adaptations of pile capacity analysis, in which the resistance to penetration is calculated as the sum of an end bearing term on the rim and friction on the inside and outside. In sands the seepage pattern set up by the suction processes alters the effective stress regime in a way that aids installation.
The calculation has been implemented in a spreadsheet program SCIP. Figure 8 shows for example a comparison between variation of measured suction in a model test installation with tip penetration of the caisson (Sanham, 2003), and the SCIP calculation.
0
50
100
150
200
250
0 500 1000 1500 2000 2500 3000Suction, s (Pa)
Pene
tratio
n, h
(mm
)
SCIP ResultsExperimental Result
Figure 8: Comparison of SCIP with model test
The other approach involves use of CPT data to infer directly the resistance dR to penetration of the caisson. The required suction requ to penetrate the caisson to depth d is calculated as:
( ) '( )( ) dreqsuc
R d G du dA−
∆ = (2)
where '( )G d is the self-weight of the caisson at penetration depth d (reduced for buoyancy), and
sucA is the area inside the caisson, where the suction is applied.
The penetration resistance is calculated from the following expression, which is based on calibration against measured data:
0
0
( ) ( ) ( ) ( ) ( )
( ) ( )
d
d t tip t out out s
d
in in s
R d K d A q d A K z f z dz
A K z f z dz
= + +∫∫
(3)
where tq is the corrected cone resistance and sf the sleeve friction at depth z. tK is a coefficient relating
tq to the unit tip resistance on the rim. This resistance is adjusted for the reduction due to the applied suction by the expression:
1t
t t tcrit
uK k ru
β⎛ ⎞∆
= −⎜ ⎟∆⎝ ⎠ (4)
where tk is an empirical coefficient relating tq to the tip resistance during static penetration of the caisson,
tr is the maximum reduction in tip resistance. critu∆ is the critical suction resulting in the critical hydraulic gradient 1criti = along the skirt. tβ is an empirical factor.
outK and inK are coefficients relating sf to the unit skin friction on the outside and inside of the skirt. The water flow along the skirt changes the skin friction. For the inside skin friction the coefficient reduces the skin friction when suction is applied, whereas on the outside the skin friction is increased. The coefficients are established as:
1
1
out
in
out out outcrit
in in incrit
uK ru
uK ru
β
β
α
α
⎛ ⎞∆= +⎜ ⎟∆⎝ ⎠
⎛ ⎞∆= −⎜ ⎟∆⎝ ⎠
(5a,b)
Where outα and inα are empirical coefficients relating
sf to the unit skin friction during static penetration of the caisson. outr and inr are the maximum changes in skirt friction. outβ and inβ are empirical factors.
The required suction ureq to penetrate the prototype in Frederikshavn was predicted using equation (2). The result of the analysis is shown in Figure 9. The lower line represents ureq calculated from the CPT tests. The curved line represents the limiting suction upip which would cause piping to occur. umax is the theoretical maximum net suction, limited by the possibility of cavitation within the caisson, as the absolute pressure approaches zero, so
-
that =maxu 100kPa above water level and increases linearly with the water depth, as shown by Figure 9. umax is used to calculate the accessible net suction, which is limited by the efficiency of the pumps, upump. As is seen, the suction in shallow water can be limited either by the suction causing piping or by the accessible net suction available from the pumps.
The suction upip causing piping has been studied at the test site in Frederikshavn by installation tests on 2x2m and 4x4m caissons. Figure 10 shows a 4x4m caisson where the limiting suction upip has been achieved, and soil failure by piping has occurred. The soil outside of the skirt is sucked into the caisson and the penetration of the caisson cannot proceed.
If a tripod or tetrapod structure is to be installed, then levelling of the structure can be achieved by separately controlling the suction in each of the caissons. For a monopod structure, however, an alternative strategy has to be adopted. Experience suggests that for installation in either clay or sand, the level of the caisson is rather sensitive to the
application of eccentric loads (moments), especially in the early stages of installation. This offers one possibility for controlling the level of the caisson: by use of an eccentric load that can be adjusted in position to keep the caisson level.
An alternative strategy, which has proven to be highly successful for installation in sand, is to divide the rim into sections and to control the pressures at the skirt tip in each section individually. By applying pressure over one segment of the caisson rim the upward hydraulic gradient within the caisson can be enhanced locally, thus encouraging additional downward movement for that sector. By controlling the pressures at a number of points the caisson may be maintained level.
This method would not be applicable in clays. One possibility, as yet untried at large scale, for controlling level in clays would be to use a segmented caisson in which the suctions in the different segments could be controlled independently.
Some preliminary small scale tests suggest that this approach might be successful in sand too (Coldicott, 2005). Figure 11 shows the volumes of water pumped from the two halves of a 400mm diameter caisson split by a diametral vertical wall. About 60% of the water pumped represents the volume displaced by the descending caisson, whilst about 40% represents seepage beneath the caisson rim. Figure 12 shows that during the installation the suctions developed in the two halves were (as would be expected in a uniform material) almost equal.
5. CAISSON PERFORMANCE: MONOPOD
A large number of tests have been devoted to studying the performance of a caisson under moment loading at relatively small vertical loads, as is relevant to the wind turbine design. Some details of the test programmes are given in Table 2.
Figure 9: Suction required for installation at Frederikshavn
Figure 10: The limiting suction upip has been achieved and soil failure by piping has occurred.
0
50
100
150
200
250
300
350
400
0 5 10 15 20 25 30 35Volume, (10-3 m3)
Pen
etra
tion,
h (m
m)
Cell 1Cell 2
Total Volume
Volume Displaced
Seepage Volume
Figure 11: Volumes pumped from 2-cell caisson in sand.
-
5.1 Sand: field tests
The largest test involves the instrumented Vestas V90 3.0MW prototype turbine at Frederikshavn, Denmark. The caisson is installed in a shallow 4m depth lagoon next to the sea, and the turbine is fully operational. The only significant difference between this installation and an offshore one is that the structure is not subjected to wave loading.
The test program involving the prototype (turbine and caisson) is focusing on long-term deformations, soil structure interaction, stiffness and fatigue. The prototype has been equipped with: • an online monitoring system that measures the
dynamic deformation modes of the foundation and the wind turbine,
• a monitoring system that measures the long-time deflection and rotation of the caisson
• a monitoring system that measures the pore pressure along the inside of the skirt.
The online monitoring system that measures the modes of deformation of the foundation and wind turbine involves 15 accelerometers and a real-time data-acquisition system. The accelerometers are placed at three different levels in the turbine tower and at one level in compartments inside the caisson foundation. The positions are shown in Figure 13, and the locations and measuring directions are defined in Figure14.
Output-only Modal Analysis has been used to analyze the structural behaviour of the wind turbine during various operational conditions. The modal analysis has shown highly damped mode shapes of the foundation/wind turbine system, which the present aero-elastic codes for wind turbine design cannot model. Further studies are to be carried out with respect to soil-structure interaction. A detailed description of the measuring system and the Output-Only Modal Analysis is given by Ibsen and Liingaard (2005).
The static moment tests referred to in Table 2 at Sandy Haven and at Burry Port were relatively straightforward, with very simple instrumentation, but those at Frederikshavn test site and at Luce Bay were detailed investigations.
The large scale tests at Frederikshavn is part of a research and development program concerning caisson foundation for offshore wind turbines. The research program is a co-operation between Aalborg
Table 2: Moment loading tests
Site Soil D (m) L
(m) Ref.
Frederikshavn Sand 12.0 6.0 - Frederikshavn Sand 2.0 2.0 - Sandy Haven Sand 4.0 2.5 - Burry Port Sand 2.0 2.0 21 Luce Bay Sand 3.0 1.5 27
Oxford laboratory Sand
0.1 0.15 0.15 0.2 0.2 0.3
0.0-0.066 0.05 0.1 0.1 0.2
0.15
2,4 2,7
42,43 34,42,43
11,43 11,42,43
Aalborg laboratory Sand 0.2 0.3 0.4
0.0 – 0.2 0.0 – 0.3 0.0 – 0.4
-
Bothkennar Clay 3.0 1.5 26
Oxford laboratory Clay 0.2 0.3 0.1
0.15 34
UWA centrifuge (100g) Clay
0.06
0.02 0.03 0.06
12
Level IV: 89 m
Level III: 46 m
Level II: 13 m
Level I: 6 m
Figure 13: Sensor positions in tower and foundation.
0
50
100
150
200
250
300
350
400
0 1000 2000 3000 4000 5000 6000Suction, s (Pa)
Pene
tratio
n, h
(mm
)
Cell 1Cell 2
Figure 12: Suctions required for installation of 2-cell caisson in sand.
-
University and MBD offshore power (Ibsen et al. 2003). The large scale tests are complemented by laboratory studies. The laboratory and large scale tests are intended to model the prototype in Frederikshavn directly. In order to design a caisson foundation for offshore wind turbines several load combinations have to be investigated. Each load combination is represented by a height of load h above the foundation and a horizontal force H. The moment at the seabed is calculated as M = hH. Table 3 shows that the resulting loading height varies from 10m (for a wave force in shallow water) to 104.4m (force from normal production of a 3MW turbine in 20m of water). Scaling of the tests is achieved by:
p
mpm
DDhh = (6)
where D is the diameter of the caisson and index m and p are for model and prototype. The values of the loading height in the test program are shown in Table 3.
The large scale tests at Frederikshavn employ loading by applying a horizontal load at a fixed height, under constant vertical load. A steel caisson with an outer diameter of 2m and a skirt length of 2m has been used. The skirt is made of 12mm thick steel plate. Figure 15 shows the caisson prior to installation, and Figure 16 the overall test setup. Currently 10 experiments have been conducted, but the testing program is ongoing. Each test has three phases:
1. Installation phase: The caisson is installed by means of suction. CPT tests are performed before and after installation of the caisson.
2. Loading phase: An old tower from a wind turbine is mounted on top of the caisson. The caisson is loaded by pulling the tower
Figure 14: Sensor mountings in the tower and foundation at Frederikshavn.
Table 3. Loading heights in the Aalborg test program
Prototype Laboratory Model Field Model
m12=pD m2.0=mD 0.3m 0.4m 2.0m
ph [m] mh [m] mh [m]
104.4 1.74 2.61 3.48 17.40 69.6 1.16 1.74 2.32 11.60 38.0 0.63 0.95 1.27 6.33 20.0 0.33 0.50 0.67 3.33 10.0 0.17 0.25 0.33 1.67
Figure 15: Caisson for large scale test at Frederikshavn
loading tower
loading wiretower located on
bucket foundation
3 MW Vestaswindmill on bucket
foundation
Figure 16: Setup for combined loading of 2x2m caisson at Frederikshavn. (Back: prototype 3MW Vestas wind turbine on the 12 x 6m caisson)
-
horizontally with a wire. The combined loading (H,M) is controlled by changing the height of loading.
3. Dismantling phase. The caisson is removed by applying overpressure inside the bucket.
Figure 17 shows the moment rotation curve for a test on the 2x2m caisson at Frederikshavn. The test is performed with hm = 17.4m and a vertical load on the caisson of 37.3kN. The fluctuations in the curve are caused by wind on the tower.
Figure 17: Moment-rotation test on 2x2m caisson.
Tests at Luce Bay were designed by Oxford University and conducted by Fugro Ltd.. The moment loading tests were of two types. Firstly small amplitude (but relatively high frequency) loading was applied by a “Structural Eccentric Mass Vibrator” (SEMV) in which rotating masses are used to apply inertial loads at frequencies up to about 12Hz. Secondly larger amplitude, but lower
frequency, cycles were applied using a hydraulic jack. A diagram of the loading rig, which allowed both moment and vertical loading tests, is shown in Figure 18.
The SEMV test involve cycles of moment loading at increasing amplitude as the frequency increases. Figure 19 shows the hysteresis loops obtained from a series of these cycles at different amplitudes. As the cycles become larger the stiffness reduces but hysteresis increases. The tests were interpreted (Houlsby et al., 2005b) using the theory of Wolf (1994), which takes account of the dynamic effects in the soil, and the equivalent secant shear modulus for each amplitude of cycling determined.
Figure 20 shows the moment rotation curves for much larger amplitude cycling applied by the hydraulic jack. Again hysteresis increases and secant stiffness decreases as the amplitude increases. The unusual “waisted” shape of the hysteresis loops at very large amplitude is due to gapping occurring at the sides of the caisson.
The secant stiffnesses deduced from both the SEMV tests and the hydraulic jacking tests are combined in Figure 21, where they are plotted against the amplitude of cyclic rotation. It is clear that the two groups of tests give a consistent pattern of reduction of shear modulus with strain amplitude, similar to that obtained for instance from laboratory tests.
5.2 Sand: laboratory tests
Turning now to model testing, a large number of tests have been carried out both at Aalborg and at Oxford. Almost all the model tests have involved “in plane” loading (in which the moment is about an
4000 4000 6000
30001500
H
H
HB
CC
A
RR
W
V
A
B
C
V
LL
L
L L LL
(a) (b)
Figure 18: Field testing equipment, dimensions in mm. Water level and displacement reference frames not shown. (a) arrangement for jacking tests on 1.5m and 3.0m caissons, (b) alternative arrangement during SEMV tests. Labels indicate (A) A-frame, (B) concrete block, (C) caissons, (H) hydraulic jacks, (L) load cells, (R) foundations of reaction frame, (V) SEMV, (W) weight providing offset load for SEMV tests.
-
axis perpendicular to the horizontal load). However, a test rig capable of applying full 6 degree-of-freedom loading has recently been developed by Byrne and Houlsby (2005).
The model tests at Aalborg are performed by the test rig shown in Figure 22. The rig consists of a test box and loading frame. The test box consists of a steel frame with an inner width of 1.6m x 1.6m and an inner total depth of 0.65m. The test box is filled with Aalborg University Sand No 0. After each experiment the sand in the box is prepared in a systematic way to ensure homogeneity within the box, and between the different test boxes. The sand
is saturated by the water reservoir shown in Figure 22. Before each experiment CPT-tests are performed to verify the density and strength of the sand. The caisson is then installed and loaded with a constant vertical load. The vertical load is kept constant through the experiment, while the horizontal force is applied to the tower by the loading device mounted on the loading frame, see Figure 21. The tower and the loading device are connected by a wire. The combined loading (H, M) is controlled by the height of loading h. The loading frame allows the possibility of changing h from 0.1m to 4.0m above the sand surface (Table 3). The horizontal force H is measured by a transducer connected to the wire. The deformation of the foundation and the moment are measured with the measuring cell mounted on the top of the caisson, as shown by Figure 23.
Laboratory tests at Oxford University have used a versatile 3 degree-of-freedom loading rig designed by Martin (1994) and adapted by Byrne (2000) (see also Martin and Houlsby (2000) and Gottardi et al. (1999)). The rig is shown in Figure 24, and is capable of applying a wide range of combinations of vertical, horizontal and moment loading under either displacement or load control.
Typical moment loading tests involve applying a fixed vertical load, and then cycling the rotation at
-30
-20
-10
0
10
20
30
-0.00005 -0.000025 0 0.000025 0.00005
Rotation (radians)
Mom
ent (
kNm
)
6Hz
7Hz
8Hz
9Hz
10H
Figure 19: Hysteresis loops from SEMV tests on 3m caisson.
-600
-500
-400
-300
-200
-100
0
100
200
300
400
500
-0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08
Rotation of caisson centre (2R θ) (m)
Mom
ent (
kNm
)
Figure 20: Hysteresis loops from hydraulic jacking tests on 3m caisson.
0
10
20
30
40
50
60
70
80
90
100
0.000001 0.00001 0.0001 0.001 0.01 0.1∆θ (radians)
G (M
Pa)
JackingSEMVHyperbolic curve fit
Figure 21: Shear modulus against rotation amplitude.
Figure 22: The caisson test rig at Aalborg University
-
increasing amplitude. An example is given in Figure 25.
The first interpretation of such tests is to determine the yield surface for a single surface plasticity model (see section 7.2 below, and also Martin and Houlsby (2001), Houlsby and Cassidy (2002), Houlsby (2003), Cassidy et al. (2004)). An example of the yield points obtained, plotted in the vertical load-moment plane, is given in Figure 26. Of particular importance is the fact that at very low vertical loads there is a significant moment capacity, and that this extends even into the tensile load range. In these drained tests the ultimate load in tension is a
significant fraction of the weight of the soil plug inside the caisson.
Sections of the yield surface can also be plotted in H-M space as shown in Figure 27, where the data here have been assembled from many tests at different stress levels. The flow vectors are also plotted in this figure, and show that in this plane (unlike the V-M plane) associated flow is a reasonable approximation to the behaviour. Feld (2001) has observed similar shapes of a yield surface for a caisson in sand.
We now consider the possibility of scaling the results of laboratory tests to the field. The test at Frederikshavn shown in Figure 17 was on a caisson with a ratio 12 =RL , at an RHM 2 value of
approximately 8.7, and with a value of γ′π 32 RV of about 0.62. Using the data from the Oxford laboratory on 0.2x0.2m caissons this requires a vertical load of about 60N. In fact a test had been carried out with 12 =RL and N50=V . According to the scaling relationships discussed in section 3, the moment should be scaled according to γ′4R (a factor of 6250) and the rotational displacement θR2
according to γ′3R (a factor of 25). Figures 26 and 27 suggest that for a vertical load of 60N rather than
Figure 23: The measuring cell connecting the caisson and the tower.
Figure 24: Three degree-of-freedom testing rig at Oxford University
-100
-80
-60
-40
-20
0
20
40
60
80
100
-2.0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0Rotational Displacement, 2Rθ (mm)
Mom
ent L
oad,
M/2
R (N
)
Figure 25: Moment-rotation test on sand
0
20
40
60
80
100
-160 -120 -80 -40 0 40 80 120Vertical Load, V (N)
Mom
ent L
oad,
M/2
R (N
)Experiment, M/2RH = 1
Fitted Yield Surface
Soil Plug Weight
Figure 26: Experimentally determined yield surface in V-M plane
-
50N a moment capacity say 5% higher might be expected, and that for the higher value of RHM 2 a further increase of say 15% is appropriate. We therefore apply a factor of 7500 to the moments and 25 to the rotational displacements. The result is shown in Figure 28. It can be seen that after scaling the moment at a θR2 value of 0.04 m is about 120kNm, compared to about 280kNm measured in the field. Although there is a factor of about 2 between these values, it must be borne in mind that there are a number of possible causes of difference between the tests (e.g. the sand in the field test may be much denser), and also that a factor of 7500 has already been applied: a factor of 2 is relatively small by comparison.
5.3 Clay: field and laboratory tests
Less work has been carried out on clay than on sand. The large scale trials at Bothkennar (Houlsby et al. 2005b) are complemented by laboratory studies intended to model these trials directly, and therefore add confidence to the scaling of the results to prototype size caissons (Kelly et al., 2005a).
At Bothkennar, moment loads were applied to a 3m x 1.5m caisson by two means. Small amplitude, but relatively high frequency (10Hz) loading was applied by means of the SEMV device described above, and larger amplitude cycles, but at much lower frequency, were applied using a hydraulic jack. In both cases the loading was 4m above the caisson, so that 33.1=Dhload . The most important observation from these tests was the gradual reduction of secant stiffness (and increase in hysteresis) as the amplitude of the load cycles increases.
The laboratory tests, specifically modelling the field tests, involved just relatively low frequency loading. After the scaling relationships described in section 3 were applied, there was a satisfactory agreement between laboratory and field data, especially at relatively small amplitudes of movement. As an example, Figure 29(a) shows the results (in dimensionless form) for rotation of the 3.0m diameter caisson in the field, and Figure 29(b) the equivalent results, also in dimensionless form, from the small scale model test. The pattern of behaviour is remarkably similar in the two tests. This sort of comparison is vital to establish
-120
-80
-40
0
40
80
120
-180 -140 -100 -60 -20 20 60 100 140 180Horizontal Load, H(N)
Incremental Horizontal Displacement, du (mm)
Mom
ent L
oad,
M/2
R(N
) In
crem
enta
l Rot
atio
n, 2
Rdt
heta
(mm
) V = -50 N
V = 0 N
V = 50 N
Figure 27: Yield surfaces and flow vectors in H-M space.
-150
-100
-50
0
50
100
150
-0.06 -0.04 -0.02 0 0.02 0.04 0.06
Rotational Displacement, 2Rtheta (m)
Mom
ent,
M (k
Nm
)
Figure 28: Laboratory moment test scaled to field conditions for comparison with Figure 17
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
-0.015 -0.01 -0.005 0 0.005 0.01
θ
M/[s
u(2R
)3]
(a) field test
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
-0.015 -0.01 -0.005 0 0.005 0.01
θ
M/[s
u(2R
)3]
(b) model test Figure 29: Moment-rotation results presented in non-dimensional form for laboratory and field tests.
-
confidence in the use of model testing to develop design guidelines.
6. CAISSON PERFORMANCE: TETRAPOD OR TRIPOD
In the following, in which we consider multiple footing designs to support the wind turbine, we shall refer principally to a tetrapod (four footings) rather than a tripod. As a tripod is perhaps the most obvious multiple footing design to use, and has the obvious advantage of simplicity, our preference for the tetrapod deserves some explanation.
As is discussed below, prudent design of a multiple footing structure will avoid tension being applied to any of the foundations (except under the most extreme of circumstances). This in effect dictates the separation of the foundations for a given overturning moment and weight of structure. Approximate calculations indicate that the tetrapod structure is usually a more favourable configuration to avoid tension, as it requires somewhat less material. The differences are not large, and a tripod may be preferred in some circumstances, but we shall refer to a tetrapod, as this will probably be more efficient. The important mechanism is the same in both cases: the overturning moment is resisted by opposing “push-pull” action on the foundations.
In Table 4 we list the tests that have been carried out on vertical loading of caissons relevant to the wind turbine problem. In addition to these studies there are a number of other relevant studies which have been directed towards vertical loading of caissons for structures in the oil and gas industry or for use as anchors.
6.1 Sand: field and laboratory tests
The simplest tests on vertical loading of caissons in sand, which are relevant both to installation and to subsequent performance, simply involve pushing caissons vertically into sand to determine the vertical load-displacement response. Figure 30 shows the results of a set of such tests on caissons of different L/D ratios, Byrne et al. (2003). It is clear from the figure that there is a well-established pattern. While the caisson skirt is penetrating the sand there is relatively low vertical capacity, but as soon as the top plate makes contact with the sand there is a sudden increase in capacity. The envelope of the ultimate capacities of footings of different initial L/D ratios also forms a single consistent line.
Of most importance, however, is the performance of the caissons under cyclic vertical loading. Figure
31 shows the results of tests on a 300mm diameter caisson subjected to rapid cyclic loading. Small-amplitude cycles show a stiff response, with larger cycles showing both more hysteresis and more accumulated displacement per cycle. The most important observation is that as soon as the cycles go into tension, a much softer response is observed, and the hysteresis loops acquire a characteristic “banana” shape. Clearly the soft response on achieving tension should be avoided in design. Closer examination of the curves reveals that the softening in fact occurs
Table 4: Vertical loading tests
Site Soil D (m)
L (m)
Ref.
Luce Bay Sand 1.5 1.0 27
Oxford laboratory Sand
0.05 0.1
0.15 0.15 0.2
0.28
0.0 - 0.1 0.0 - 0.066
0.05 0.1
0.133 0.18
11 2,5 2,5 34 34
25,32,33,35 Bothkennar Clay 1.5 1.0 26 UWA centrifuge (100g)
Clay 0.06 0.02 0.03 0.06
3
0
50
100
150
200
250
300
350
400
0 50 100 150Vertical Displacement, w (mm)
Ver
tical
Loa
d, V
(N)
0 0.5 1 1.5 2 2.5 3 3.5Normalised Vertical Displacement, w/D
Figure 30: Vertical load-penetration curves for caissons of different L/D ratios
-400-200
0200400600800
1000120014001600
200 210 220 230 240 250 260 270Vertical Displacement (mm)
Verti
cal S
tress
(kP
a)
Figure 31: Cyclic vertical loading of model caisson.
-
once the drained frictional capacity of the skirts has been exceeded, rather than simply the transition into tension.
Paradoxically, although additional accumulated displacement is observed once tension is reached, this accumulated displacement is downwards (not upwards as one might expect because of the tensile loading).
The above observations mean that tension must be avoided in a prudent design of a tripod or tetrapod foundation for a wind turbine. However, in all but the shallowest of water, avoiding this tension means that either the foundation must have a large spacing between the footings, or that ballasting must be used. The latter may in fact be a cost effective measure in deep water.
Some designers may wish to reduce conservatism by allowing for the possibility of tension under extreme circumstances. It is therefore useful to examine the ultimate tensile capacity under rapid loading. Figure 32 shows the result of three such tests. The slowest test (at 5mm/s) is almost drained, and a very low capacity in tension is indicated. The
capacity in this case is simply the friction on the skirts. The test at 100mm/s (but zero ambient water pressure) shows a larger capacity, and it is straightforward to show that this is controlled by cavitation beneath the foundation. This means that at elevated water pressures (as in the third test) the capacity rises approximately in step with to the ambient water pressure, as correspondingly larger pressure changes are required to cause cavitation. This problem is studied in more detail by Houlsby et al. (2005a).
It is important to note, however, that although ambient water pressure increases the ultimate capacity, it has negligible influence on the tensile load at which a flexible response begins to occur.
Comparison of cyclic loading tests at different scales and at different speeds shows that it is difficult to scale reliably the accumulated displacements, which reduce with larger tests and higher loading rates. However, when the scaling rules described earlier are applied, the shapes of individual hysteresis loops at different scales and at different rates become remarkably similar. Figure 33 shows a comparison, for instance, of loops at three different load amplitudes from four different tests. At each particular load amplitude the loops from the different tests are very similar.
The accumulation of displacement after very large numbers of cycles is difficult to predict, and so far few data are available. Rushton (2005) has carried out vertical loading tests to about 100000 cycles on a model caisson in sand, using a simple loading rig which employs a rotating mass and a series of pulleys to apply a cyclic load. A typical result is shown in Figure 34, on a caisson 200mm diameter and 100mm deep, with cycling between
N260210 ± . The caisson is therefore subjected (at the minimum vertical load) to a small tension, but less than the frictional capacity of the skirts. The dimensionless accumulated vertical displacement is seen in Figure 34 to increase approximately with the logarithm of the number of cycles of loading (after about 1000 cycles). Note that even in this case where there is a tensile loading in part of the cycle, the net movement is downwards. The displacement is of course very sensitive also to the amplitude of the cycling.
6.2 Clay: field and laboratory tests
Very few vertical loading tests relevant to the wind turbine problem have been completed on caissons in clay, although there have been a number of studies directed towards suction caissons used as tension
-450
-400
-350
-300
-250
-200
-150
-100
-50
0150 160 170 180 190 200 210
Vertical Displacement (mm)
Verti
cal S
tress
(kP
a)
5mm/s, 0kPa100mm/s, 0kPa100mm/s, 200kPa
Direction of movement
Figure 32: Tensile capacity of model caisson pulled at different rates and at different ambient pressures.
-1
0
1
2
3
4
5
0 0.01 0.02 0.03 0.04 0.05
[w/(2R)][pa/(2Rγ')]1/2
V/[ γ
'(2R
)3]
1.5m Field
0.15m Suction
0.2m Pushed
0.15m Pushed
Figure 33: Hysteresis loops from tests at different scales and rates.
-
anchors, e.g. El-Gharbawy (1998), Watson (1999), House (2002).
At Bothkennar tests were carried out in which inclined (but near vertical) loading was applied to a 1.5m diameter caisson (Houlsby et al., 2005b). Difficulties were encountered with the control of the loads using a hydraulic system, and the resulting load paths are therefore rather complex, leading to difficulties in interpretation. Further work on vertical loading in clay is required before definitive conclusions can be drawn, and in particular the issue of tensile loading in clay needs attention. Some preliminary results (Byrne and Cassidy, 2002), shown in Figure 35, show that the tensile response may be sensitive to prior compressive loading. Footings loaded in tension immediately after installation showed a stiff tensile response, whilst those loaded after first applying a compressive load to failure showed a more flexible tensile response.
-80
-60
-40
-20
0
20
40
60
0 0.2 0.4 0.6 0.8 1
Normalised Displacement, (w + L)/D
Verti
cal S
tress
, V/A
(kPa
)
Test 1: Post Bearing Capacity
Test 2: Pre Bearing Capacity
Figure 35: Tension tests on caisson foundations in clay
7. NUMERICAL STUDIES
7.1. Finite element studies A number of analyses of suction caissons for offshore wind farms have been carried out as part of commercial investigations for possible projects. A
more detailed research project was carried out by Feld (2001).
Finite element analysis is particularly appropriate for establishing the effects of design parameters on the elastic behaviour of caissons, and has been used by Doherty et al. (2004a,b) to determine elastic stiffness coefficients for caisson design which take into account the flexibility of the caisson wall as well as coupling effects between horizontal and moment loading.
7.2 Plasticity models An important tool for the analysis of soil-structure interaction problems, particularly those involving dynamically sensitive structures are “force resultant” models. In these the behaviour of the foundation is represented purely through the force resultants acting upon it, and the resulting displacements (see Figure 4). Details of stresses and deformations within the soil are ignored. The models are usually framed within the context of work-hardening plasticity theory. Examples include models for foundations on clay (Martin and Houlsby, 2001) and on sand (Houlsby and Cassidy, 2002). Overviews of the development of these models are given by Houlsby (2003) and Cassidy et al. (2004)
These models have been further developed specifically for the offshore wind turbine application. The developments include: • Generalisation to full three-dimensional loading
conditions, • Inclusion of special features to represent the
caisson geometry, • Expression of the models within the “continuous
hyperplasticity” framework to allow realistic description of hysteretic response during cyclic loading.
A model with all these features is described by Lam and Houlsby (2005). The fitting of cyclic data to a continuous hyperplastic model is discussed by Byrne et al (2002a).
8. OTHER CONSIDERATIONS
We have concentrated here on the design of caisson foundations as far as capacity and stiffness are concerned for in-service conditions. However, there a number of other issues which need to be addressed in a caisson design, and we mention them here briefly.
8.1 Scour Scour is more important for caissons, since they are relatively shallow, than for piles. The size of caissons, and the fact that part of the caisson
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
1 10 100 1000 10000 100000
Number of Cycles
[w/(2
R)][
p a/(2
Rγ’)
]1/2
MinMax
Figure 34: Accumulated displacement during long term cyclic vertical loading on sand
-
inevitably protrudes above mudline level, creates rather aggressive conditions for scour. The fact that the caissons may be installed in mobile shallow-water environments means that proper consideration of this problem is essential, especially in sands.
If the scour depth can be determined with sufficient confidence (e.g. from comprehensive model testing) then it may be possible to permit the scour to occur, and simply allow for this in the design by ensuring that the caisson is deep enough.
It is more likely, however, that scour protection measures such as rock-dumping will need to be employed. Practical experience suggests that such protection must be placed very soon after caisson installation, as scour can occur very rapidly. In highly mobile environments, significant scour can, for instance, occur due to the currents in a single tide. Model testing indicates, however, that scour protection measures can be effective in preventing further erosion (R. Whitehouse: private communication). For in-service conditions regular monitoring for the possibility of scour would be prudent.
8.2 Liquefaction The transient pore pressures induced in the seabed can induce liquefaction, especially if the seabed is partially saturated due to the presence of gas (as can occur in shallow seabeds, largely due to decay of organic matter).
The problem is a complex one, but typically, at one stage in the wave cycle, the pore pressure in the seabed can become equal to the overburden stress, and the effective stress falls to zero. This problem is further complicated by the presence of a structure, which clearly modifies the pore pressure pattern that would occur in the far field. Although some progress has been made, the interactions are complex, and theoretical modelling of the problem is not straightforward.
8.3 Wave-induced forces A quite different problem from liquefaction is also related to the fact that the principal forces on the structure are wave induced. As a wave passes the column of the structure it exerts large horizontal forces (of the order of a few meganewtons for a large wave), which also cause overturning moments. However, at the same time the wave causes a transient pressure on the seabed, and on the lid of the caisson. Because the caissons are in shallow water these pressures are quite large. The pore water pressure within the caisson is unlikely to change as rapidly as the pressure on the lid, so there will be pressure differentials across the lid of the caisson
which result in net vertical forces, and overturning moments on the caisson.
The relative phase of the different sources of loading is important. As the crest of the wave just reaches the structure, the wave kinematics are such that the horizontal forces are likely to be largest. At this stage the pressure on the upwave side of the caisson is likely to be larger than on the downwave side. The net result is that the moment caused by the pressures on the caisson lid opposes that caused by the horizontal loading, so this effect is likely to be beneficial to the performance of the caisson. Little work has, however, yet been completed on the magnitudes of these effects. The problem is complicated by the fact that the kinematics of large (highly non-linear) shallow water waves is still a matter of research, as is their interaction with structures.
8. CONCLUSIONS
In this paper we have provided an overview of the extensive amount of work that has been carried out on the design of suction caisson foundations for offshore wind turbines. Further verification of the results presented here is still required, and in due course it is hoped that this will come from instrumented caisson foundations offshore. Our broad conclusions at present are: • Suction caissons could be used as foundations
for offshore wind turbines, either in monopod or tripod/tetrapod layout.
• The combination of low vertical load and high horizontal load and moment is a particular feature of the wind turbine problem.
• Stiffness and fatigue are as important for turbine design as ultimate capacity.
• Monopod foundation design is dominated by moment loading.
• Tripod/tetrapod foundation design is dominated by considerations of tensile loading.
• The moment-rotation response of caissons in sand has been extensively investigated by model tests and field trials, and modelled theoretically by finite element analyses and force resultant (yield surface) models.
• As amplitude of moment loading increases, stiffness reduces and hysteresis increases.
• Moment loading in clay has been less extensively investigated in the laboratory and field.
• Vertical loading in sand has been extensively investigated in the laboratory and field.
-
• The as the amplitude of vertical loading increases, stiffness reduces and hysteresis increases. Once tension is reached there is a sudden reduction of stiffness.
• Whilst high ultimate tensile capacities are possible (especially in deep water) this is at the expense of large movements.
• Application of scaling procedures for tests in both sand and clay allows model and field tests to be compared successfully as far as stiffness and the shapes of hysteresis loops is concerned.
• Cumulative displacements after very many cycles are harder to model.
• The design of caisson foundations also needs to take into consideration issues such as scour and liquefaction.
It is hoped that the conclusions above lead in due course to application of suction caissons as foundations for offshore wind turbines, thereby making an important renewable energy source more economically viable.
ACKNOWLEDGEMENTS
The work at Oxford University has been supported by the Department of Trade and Industry, the Engineering and Physical Sciences Research Council and a consortium of companies: SLP Engineering Ltd, Aerolaminates (now Vestas), Fugro Ltd, Garrad Hassan, GE Wind and Shell Renewables. An outline of the project is given by Byrne et al. (2002b). The work of Richard Kelly, Nguyen-Sy Lam and Felipe Villalobos on this project is gratefully acknowledged.
REFERENCES 1. Bolton, M.D. (1986) “The strength and Dilatancy of
Sand”, Geotechnique, Vol. 36, No. 1, pp 65-78 2. Byrne, B.W. (2000) "Investigations of Suction Caissons in
Dense Sand", D.Phil. Thesis, Oxford University 3. Byrne, B.W. and Cassidy, M.J. (2002) “Investigating the
response of offshore foundations in soft clay soils”, Proc. OMAE, Oslo, Paper OMAE2002-28057
4. Byrne, B.W. and Houlsby, G.T. (1999) "Drained Behaviour of Suction Caisson Foundations on Very Dense Sand", Offshore Technology Conference, 3-6 May, Houston, Paper 10994
5. Byrne, B.W. and Houlsby, G.T. (2002) “Experimental Investigations of the Response of Suction Caissons to Transient Vertical Loading”, Proc. ASCE, J. of Geot. Eng., Vol. 128, No. 11, Nov., pp 926-939
6. Byrne, B.W. and Houlsby, G.T. (2003) "Foundations for Offshore Wind Turbines", Phil. Trans. of the Royal Society of London, Series A, Vol. 361, Dec., 2909-2930
7. Byrne, B.W. and Houlsby, G.T. (2004) “Experimental Investigations of the Response of Suction Caissons to Transient Combined Loading”, Proc. ASCE, J. of Geotech. and Geoenvironmental Eng., Vol. 130, No. 3, pp 240-253
8. Byrne, B.W. and Houlsby, G.T. (2005) "Investigating 6 degree-of-freedom loading on shallow foundations", Proc. International Symposium on Frontiers in Offshore Geotechnics, Perth, Australia, 19-21 September, in press
9. Byrne, B.W., Houlsby, G.T. and Martin, C.M. (2002a) "Cyclic Loading of Shallow Offshore Foundations on Sand", Proc. Int. Conf on Physical Modelling in Geotech., July 10-12, St John's, Newfoundland, 277-282
10. Byrne, B.W., Houlsby, G.T., Martin, C.M. and Fish, P. (2002b) "Suction Caisson Foundations for Offshore Wind Turbines", Wind Engineering, Vol. 26, No. 3, pp 145-155
11. Byrne, B.W., Villalobos,, F. Houlsby, G.T. and Martin, C.M. (2003) "Laboratory Testing of Shallow Skirted Foundations in Sand", Proc. Int. Conf. on Foundations, Dundee, 2-5 September, Thomas Telford, pp 161-173
12. Cassidy, M.J., Byrne, B.W. and Randolph, M.F. (2004) “A comparison of the combined load behaviour of spudcan and caisson foundations on soft normally consolidated clay”, Géotechnique, Vol. 54, No. 2, pp 91-106
13. Cassidy, M.J., Martin, C.M. and Houlsby, G.T. (2004) "Development and Application of Force Resultant Models Describing Jack-up Foundation Behaviour", Marine Structures, (special issue on Jack-up Platforms: Papers from 9th Int. Conf. on Jack-Up Platform Design, Construction and Operation, Sept. 23-24, 2003, City Univ., London), Vol. 17, No. 3-4, May-Aug., 165-193
14. Coldicott, L. (2005) “Suction installation of cellular skirted foundations”, 4th year project report, Dept. of Engineering Science, Oxford University
15. Doherty, J.P., Deeks, A.J. and Houlsby, G.T. (2004a) "Evaluation of Foundation Stiffness Using the Scaled Boundary Method", Proc. 6th World Congress on Computational Mechanics, Beijing, 5-10 Sept., in press
16. Doherty, J.P., Houlsby, G.T. and Deeks, A.J. (2004b) "Stiffness of Flexible Caisson Foundations Embedded in Non-Homogeneous Elastic Soil", Submitted to Proc. ASCE, Jour. Structural Engineering Division
17. El-Gharbawy, S.L. (1998) “The Pullout Capacity of Suction Caisson Foundations”, PhD Thesis, University of Texas at Austin
18. Feld T. (2001) “Suction Buckets, a New Innovative Foundation Concept, applied to offshore Wind Turbines” Ph.D. Thesis, Aalborg University Geotechnical Engineering Group, Feb..
19. Gottardi, G., Houlsby, G.T. and Butterfield, R. (1999) "The Plastic Response of Circular Footings on Sand under General Planar Loading", Géotechnique, Vol. 49, No. 4, pp 453-470
20. Houlsby, G.T. (2003) "Modelling of Shallow Foundations for Offshore Structures", Proc. Int. Conf. on Foundations, Dundee, 2-5 Sept., Thomas Telford, pp 11-26
21. Houlsby, G.T. and Byrne, B.W. (2000) “Suction Caisson Foundations for Offshore Wind Turbines and Anemometer Masts”, Wind Engineering, Vol. 24, No. 4, pp 249-255
22. Houlsby, G.T. and Byrne, B.W. (2005a) “Design Procedures for Installation of Suction Caissons in Clay and Other Materials”, Proc. ICE, Geotechnical Eng., Vol. 158 No. GE2, pp 75-82
23. Houlsby, G.T. and Byrne, B.W. (2005b) “Design Procedures for Installation of Suction Caissons in Sand”, Proceedings ICE, Geotechnical Eng., in press
24. Houlsby, G.T. and Cassidy, M.J. (2002) "A Plasticity Model for the Behaviour of Footings on Sand under Combined Loading", Géotechnique, Vol. 52, No. 2, Mar., 117-129
25. Houlsby, G.T., Kelly, R.B. and Byrne, B.W. (2005a) "The Tensile Capacity of Suction Caissons in Sand under Rapid
-
Loading", Proc. Int. Symp. on Frontiers in Offshore Geotechnics, Perth, Australia, September, in press
26. Houlsby, G.T., Kelly, R.B., Huxtable, J. and Byrne, B.W. (2005b) “Field Trials of Suction Caissons in Clay for Offshore Wind Turbine Foundations”, Géotechnique, in press
27. Houlsby, G.T., Kelly, R.B., Huxtable, J. and Byrne, B.W. (2005c) “Field Trials of Suction Caissons in Sand for Offshore Wind Turbine Foundations”, submitted to Géotechnique
28. House, A. (2002) “Suction Caisson Foundations for Buoyant Offshore Facilities”, PhD Thesis, the University of Western Australia
29. Ibsen, L.B., Schakenda, B., Nielsen, S.A. (2003) “Development of bucket foundation for offshore wind turbines, a novel principle”. Proc. USA Wind 2003 Boston.
30. Ibsen, L.B. and Brincker, R. (2004) “Design of New Foundation for Offshore Wind Turbines”, Proceedings of The 22nd International Modal Analysis Conference (IMAC), Detroit, Michigan, 2004.
31. Ibsen L.B., Liingaard M. (2005) “Output-Only Modal Analysis Used on New Foundation Concept for Offshore Wind Turbine”, in preparation
32. Kelly, R.B., Byrne, B.W., Houlsby, G.T. and Martin, C.M. (2003) "Pressure Chamber Testing of Model Caisson Foundations in Sand", Proc. Int. Conf. on Foundations, Dundee, 2-5 Sept., Thomas Telford, pp 421-431
33. Kelly, R.B., Byrne, B.W., Houlsby, G.T. and Martin, C.M., 2004. Tensile loading of model caisson foundations for structures on sand, Proc. ISOPE, Toulon, Vol. 2, 638-641
34. Kelly, R.B., Houlsby, G.T. and Byrne, B.W. (2005a) "A Comparison of Field and Laboratory Tests of Caisson Foundations in Sand and Clay" submitted to Géotechnique
35. Kelly, R.B., Houlsby, G.T. and Byrne, B.W. (2005b) "Transient Vertical Loading of Model Suction Caissons in a Pressure Chamber", submitted to Géotechnique
36. Lam, N.-S. and Houlsby, G.T. (2005) "The Theoretical Modelling of a Suction Caisson Foundation using Hyperplasticity Theory", Proc. Int. Symp. on Frontiers in Offshore Geotechnics, Perth, Australia, Sept., in press
37. Martin, C.M. (1994) "Physical and Numerical Modelling of Offshore Foundations Under Combined Loads", D.Phil. Thesis, Oxford University
38. Martin, C.M. and Houlsby, G.T. (2000) "Combined Loading of Spudcan Foundations on Clay: Laboratory Tests", Géotechnique, Vol. 50, No. 4, pp 325-338
39. Martin, C.M. and Houlsby, G.T. (2001) “Combined Loading of Spudcan Foundations on Clay: Numerical Modelling”, Géotechnique, Vol. 51, No. 8, Oct., 687-700
40. Rushton, C. (2005) “Cyclic testing of model foundations for an offshore wind turbine”, 4th year project report, Dept. of Engineering Science, Oxford University
41. Sanham, S.C. (2003) “Investigations into the installation of suction assisted caisson foundations”, 4th year project report, Dept. of Engineering Science, Oxford University
42. Villalobos, F.A., Byrne, B.W. and Houlsby, G.T. (2005) "Moment loading of caissons installed in saturated sand", Proc. Int. Symp. on Frontiers in Offshore Geotechnics, Perth, Australia, Sept., in press
43. Villalobos, F., Houlsby, G.T. and Byrne, B.W. (2004) "Suction Caisson Foundations for Offshore Wind Turbines", Proc. 5th Chilean Conference of Geotechnics (Congreso Chileno de Geotecnia), Santiago, 24-26 November
44. Watson, P.G. (1999) “Performance of Skirted Foundations for Offshore Structures”, PhD Thesis, the University of Western Australia
45. Wolf, J.P. (1994) “Foundation Vibration Analysis Using Simple Physical Models”, Prentice Hall, New Jersey
-
1 INTRODUCTION
Shallow foundations are usually designed on the as-sumption that they act in isolation. When two foot-ings (or a group of footings) are closely spaced, however, there is a beneficial interaction that can be quantified in terms of the ‘efficiency’, i.e. the ratio of the overall (group) bearing capacity to the sum of the individual (isolated) bearing capacities. The lit-erature on this topic has been surveyed by Hazell (2004). For footings on sand, numerous theoretical and experimental studies have shown that the effect of interaction becomes highly significant for friction angles greater than about 30° and spacings less than about one footing width B. In contrast, the undrained bearing capacity of closely spaced footings on clay has received very little attention, perhaps because the early theoretical work of Mandel (1963) showed that the beneficial effect of interaction was insignificant, even for fully rough footings. This was confirmed experimentally by Hazell (2004), though only a few of his tests were conducted on clay.
When considering the relevance of these findings to the design of grillages or closely spaced footings on soft offshore soils, it is important to note that the theoretical studies by Mandel (1963) were confined to homogeneous soil, and although in the experi-ments of Hazell (2004) there was a marked increase of undrained strength with depth, the dimensionless ratio kB/su0 was no more than 0.2 for the small model footings tested (su0 = mudline strength inter-cept, k = rate of increase of strength with depth). In
water depths greater than a few hundred metres, the undrained strength at seabed level can be as low as 2 to 10 kPa, increasing with depth at 1 to 2 kPa/m (Randolph 2004). A typical offshore mudmat might be 5 m wide, and if supported by a single strip foot-ing (without perforations) this would imply typical values of the ratio kB/su0 in the range 0.5 to 5. When calculating the bearing capacity of an isolated foot-ing at the upper end of this range, the influence of non-homogeneity on the bearing capacity would cer-tainly be accounted for, either by adopting appropri-ate plasticity solutions (Davis & Booker 1973, Houlsby & Wroth 1983), or by selecting a represen-tative strength su > su0. It is therefore of interest to investigate the undrained bearing capacity of closely spaced footings for a similar range of kB/su0, and to assess the effect of using a mudmat with perforations in place of a continuous foundation (this is some-times done to save weight, and to make the structure easier to remove). For a small degree of perforation it might be envisaged that there will be arching over the gap(s), such that there is no loss of bearing ca-pacity, and even if some soil is squeezed through, there may still be a beneficial interaction effect. Here we investigate these issues using plasticity analyses.
2 BEARING CAPACITY ANALYSES
2.1 Isolated footings The bearing capacity of an isolated strip footing on non-homogeneous clay was first studied by Davis &
Bearing capacity of parallel strip footings on non-homogeneous clay
C.M. Martin & E.C.J. Hazell Department of Engineering Science, University of Oxford, UK
ABSTRACT: On soft seabed soils, subsea equipment installations are often supported by mudmat foundation systems that can be idealised as parallel strip footings, grillages, or annular (ring-shaped) footings. This paper presents some theoretical results for the bearing capacity of (a) two parallel strip footings, otherwise isolated; (b) a long series of parallel strip footings at equal spacings. The soil is idealised as an isotropic Tresca mate-rial possessing a linear increase of undrained strength with depth. The bearing capacity analyses are performed using the method of characteristics, and the trends of these (possibly exact) results are verified by a compan-ion series of upper bound calculations based on simple mechanisms. Parameters of interest are the footing spacing, the relative rate of increase of strength with depth, and the footing roughness. An application of the results to the design of perforated mudmats is discussed.
-
Booker (1973). They showed that for any value of kB/su0 (zero to infinity) the stress and velocity fields computed using the method of characteristics fur-nished lower and upper bounds that were coincident. Davis & Booker’s analyses have since been verified by several authors, and they can also be replicated using the free computer program ABC (Martin 2004). Figure 1a shows the variation of the bearing capacity factor Nc as a function of kB/su0. Note that Nc is defined with respect to the mudline strength, i.e. as Qu/Bsu0 where Qu is the ultimate bearing ca-pacity (per unit run). Figure 1b shows, for the same range of kB/su0, the extent of the zone of plastic de-formation adjacent to each side of the footing. This distance is important because it also corresponds to the critical spacing at which parallel strip footings first begin to interact and give an overall bearing ca-pacity that is greater than the sum of the individual capacities. As kB/su0 increases, the zone of plastic deformation becomes smaller, so the footings need to be closer for any interaction to occur.
Also shown in Figure 1 are the results of upper bound calculations performed using the generalised Hill- and Prandtl-type mechanisms of Kusakabe et al. (1986), which were originally developed for cir-cular footings on non-homogeneous clay. There is close agreement with the exact curves when kB/su0 is small, but this deteriorates somewhat with increasing non-homogeneity, especially for the rough footing.
2.2 Interacting footings – methodology In principle, bearing capacity analyses can be per-formed for an arbitrary number of parallel strip foot-ings at arbitrary spacings, but the calculations can become tedious, particularly when using the method of characteristics. Figure 2 shows the two problems considered here, both of which allow a favourable exploitation of symmetry: a pair of parallel strips, and an infinite number of parallel strips at equal spacings. Although impossible to realise in practice, the latter case is relevant to the interior members of a grillage containing many bearing elements. Note that in this paper S refers to the edge-to-edge spacing, not the centre-to-centre spacing as preferred by some au-thors. Note also that the footings are assumed to be rigidly connected, such that they move down to-gether without any horizontal displacement or rota-tion (for a pair of closely spaced footings there is a tendency for separation and tilting to occur).
The main bearing capacity analyses for interact-ing footings were performed using the method of characteristics. A modified version of the the Matlab program InterBC, developed by Hazell (2004) for in-teracting footings on a homogeneous c-φ-γ soil, was used. For a pair of footings, the program considers the right-hand footing and builds two meshes of characteristics, one commencing from the exterior soil surface, and one from the gap between the foot-
ing and the axis of symmetry (see Fig. 3). An itera-tive adjustment process is used to ensure that the two meshes are fully compatible at their common point C (same coordinates, same stresses). Having calculated the stress field, the program works back through the mesh and constructs the associated velocity field. These calculations are more complicated than those for an isolated footing, since the inward-flowing soil crosses a velocity discontinuity AD. Note that for non-homogeneous soil, the velocities outside AOD are not always parallel to the characteristics.
Two separate calculations of the bearing capacity are performed: one by integrating the stresses along ACB (deducting the self-weight of the ‘false head’ if applicable), and the other by equating the internal and external work rates of the collapse mechanism. In all of the analyses for this study it was found that, as the mesh of characteristics was refined, the two calculations of the bearing capacity converged to identical values. While this indicates that there are no regions of negative plastic work, it does not nec-essarily mean that the calculated bearing capacity is the exact collapse load, since it has not been demon-strated that the stress field can be extended through-out the soil. Construction of such an extension is straightforward for isolated footings (see e.g. Davis & Booker 1973, Martin 2005), but for interacting footings it would be necessary to incorporate a non-plastic zone to allow the major principal compres-sion to flip from horizontal to vertical at some point on the z axis. This is not easy, and suggests that the method of characteristics cannot readily be used to obtain strict lower bounds for interacting footings (finite element limit analysis could be used).
For a pair of smooth footings, the ‘squeezing’ type failure of Figure 3a is always critical (except on homogeneous soil, where there is no interaction ef-fect, and an infinite number of one- and two-sided mechanisms giving Nc = 2 + π can be devised). For a pair of rough footings that are very closely spaced, overall failure as a single footing of width 2B + S may be more critical than the squeezing failure of Figure 3b. When determining the variation of bear-ing capacity with spacing, it is always necessary to check this alternative mechanism, for which the bearing capacity can be determined using ABC.
Figure 4 shows some typical solutions for the case of infinitely many, equally spaced footings on non-homogeneous clay. Here the double symmetry means that it is only necessary to analyse half of one footing, so analysis using the method of characteris-tics is relatively straightforward. A single mesh is constructed, starting from the soil surface and ‘bouncing’ characteristics off the centerline of the gap as before. The mesh is adjusted until point C lies directly beneath the centre of the footing, with the major principal compression aligned vertically. Cal-culation of the associated velocity field – again in-corporating a discontinuity along AD – can then be
-
performed. As in the two-footing case, it was always found that the stress- and velocity-based calculations of the bearing capacity converged to the same value as the mesh was refined. This converged value represents a rigorous upper bound, but not a rigorous lower bound since the stress field is incomplete. If the number of footings is truly infinite then there is no alternative overall failure mechanism – squeezing failure is the only option, and the bearing capacity must approach infinity as the spacing tends to zero.
As well as the analyses performed using InterBC, some simple Hill- and Prandtl-type upper bound mechanisms were devised for the problems shown in Figure 2. These were based on the mechanisms of Kusakabe et al. (1986), but modified to allow a rigid wedge of soil to be extruded vertically between the interacting footings. In Figures 3 and 4 the outlines of the optimal upper bound mechanisms are super-imposed on the method of characteristics solutions, and there is a fairly close correspondence between the two. Note that for rough footings, the Prandtl-type mechanism shown in Figures 3b and 4b is only critical when kB/su0 is small; otherwise a Hill-type mechanism (similar to Figs 3a, 4a) governs.
2.3 Interacting footings – results Concentrating first on the pair of interacting foot-ings, Figure 5 shows the variation of efficiency (as defined at the start of the paper) with the normalised spacing S/B. For a spacing of zero, the two footings behave as a single footing of width 2B. Although this has no net effect when the soil is homogeneous, there is a beneficial interaction when the strength in-creases with depth since the influence of non-homogeneity is enhanced (2kB/su0 is greater than kB/su0, so the operative Nc is greater in Fig. 1a). For smooth footings the efficiency immediately begins to drop as soon as a gap is introduced, while for rough footings there is a brief increase in efficiency prior to the transition between overall and squeezing failure (see Section 2.2). In all cases there is a gradual de-cline towards unit efficiency as the critical spacing plotted in Figure 1b is approached.
The results for homogeneous soil (Fig. 5a) agree with those of Mandel (1963): there is no gain in effi-ciency for a pair of smooth footings, and a peak of just 1.07 (at S/B = 0.15) for a pair of rough footings. When the strength increases with depth, the potential gains in efficiency are rather greater, but the spacing needs to be small (< 0.1B), and the benefit from in-teraction is almost all attributable to the effective augmentation of kB/su0 rather than a genuine arching effect. In fact, the rough footing curves in Figure 5 clearly show that the influence of arching diminishes rapidly as non-homogeneity becomes more signifi-cant; when kB/su0 ≥ 2 there is an almost immediate transition from overall failure to squeezing failure as the spacing is increased from zero.
The predictions from the method of characteris-tics are consistent with those from the simple upper bound analyses, shown as dotted lines in Figure 5. The efficiency curve for a pair of rough footings on homogeneous clay (Fig. 5a) also agrees remarkably well with that obtained by Galloway (2004) using the finite element program ABAQUS. This suggests that the results obtained here from the method of characteristics may well be exact, though