H SERIES HORIZONTL GEAR-DRIVEN SLICERS - 12”, 13” & 14” BLADE

Research ArticleDynamic Modeling and Nonlinear Position Control ofa Quadruped Robot with Theo Jansen Linkage Mechanisms anda Single Actuator
Shunsuke Nansai1 Rajesh Elara Mohan2 Ning Tan2 Nicolas Rojas3 and Masami Iwase1
1Tokyo Denki University 5 Senjuasahicho Adachi Tokyo 120-8551 Japan2Singapore University of Technology and Design 8 Somapah Road Singapore 4873723Yale University New Haven CT 06520 USA
Correspondence should be addressed to Ning Tan ning tansutdedusg
Received 10 February 2015 Accepted 15 April 2015
Academic Editor Shahram Payandeh
Copyright copy 2015 Shunsuke Nansai et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
The Theo Jansen mechanism is gaining widespread popularity among the legged robotics community due to its scalable designenergy efficiency low payload-to-machine-load ratio bioinspired locomotion and deterministic foot trajectory In this paper weperform for the first time the dynamic modeling and analysis on a four-legged robot driven by a single actuator and composed ofTheo Jansen mechanisms The projection method is applied to derive the equations of motion of this complex mechanical systemand a position control strategy based on energy is proposed Numerical simulations validate the efficacy of the designed controllerthus setting a theoretical basis for further investigations onTheo Jansen based quadruped robots
1 Introduction
Legged robots [1ndash3] have always been a popular choice forrobotic researchers because of their superiority over tradi-tional wheeled or tracked robotic platforms on applicationsinvolving maneuverability over rough terrains Bartsch etal [4] presented their efforts in developing a six-leggedbioinspired and energy efficient robot (SpaceClimber 1) forextraterrestrial surface exploration particularly for mobilityin lunar craters Estremera et al [5] elaborated the develop-ment of crab and turning gaits for a hexapod robot SILO-6on a natural terrain containing uneven ground and forbiddenzones as well as an application to humanitarian deminingMoro et al [6] proposed an approach to directly map a rangeof gaits of a horse to a quadruped robot with an intentionof generating a more life-like locomotion cycle This workalso presented the use of kinematic motion primitives ingenerating valid and stable walking trotting and gallopinggaits that were tested on a compliant quadruped robot Inthese works the robots developed were generally effective inmimicking the gait cycles of their biological counterparts but
they suffered from high payload-to-machine-load ratio andhigh energy consumption
Several approaches were studied in developing energyefficient walking machines Reference [7] presented a setof rules towards improving energy efficiency in staticallystable walking robots by comparing two-legged namelymammal and insect configurations on a hexapod roboticplatform Reference [8] applied minimization criteria foroptimizing energy consumption in a hexapod robot overevery half a locomotion cycle especially while walking onuneven terrains Reference [9] put forward two differentapproaches to determine optimal feet forces and joint torquesfor six-legged robots towards minimizing energy consump-tion Even though these works focused on the energy opti-mization problem the robots experimented therein involveda series of links with multiple actuators to realize walk-ing motion Jansen [10] a Dutch kinetic artist proposedan unconventional closed-kinematic-chain-based approachwhich requires actuation at only a single per leg throughmapping internal cyclic motion into elliptical ones Vari-ous aspects of the Jansen mechanism have been studied
Hindawi Publishing CorporationJournal of RoboticsVolume 2015 Article ID 315673 15 pageshttpdxdoiorg1011552015315673
2 Journal of Robotics
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Y
O
Driven gear lf
Driven gear rf
(a) 2D
Driving gear 2
Driven gear lbDriving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
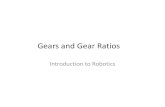
Figure 1 Schematic diagram of the quadruped robot composed of four Jansen linkage mechanisms and five gears which are driven by onlyone input attached to the bright yellow gear The red sky blue green and purple represent left-fore right-fore left-back and right-backrespectively
by a number of researchers Reference [11] proposed anextension of the Theo Jansen mechanism by introducingan additional up-down motion in the linkage center forrealizing new gait cycles with about ten times the heightof the original for climbing over obstacles Vector loop andsimple geometric methods were used in conjunction withsoftware tools such as ProEngineer and SAM for analyzingforward kinematics of the Theo Jansen mechanism in [12]An attempt to optimize the leg geometry of the TheoJansen mechanism using genetic algorithm was presentedin [13] The work explored the stability limits and tractiveabilities while validating the kinematic and kinetic modelsthrough experiments with hardware prototypes Howeverthese two works did not provide dynamics analysis anddiscussions Reference [14] conducted a preliminary dynamicanalysis using the superposition method with the intentionof optimizing the Theo Jansen mechanism but this work isincomplete without details on the analysis and discussions ofequivalent Lagrangersquos equation In fact the complete dynamicanalysis involving constraint forces and equivalent Lagrangersquosequation ofmotion is necessary for anymeaningful extensionandor optimization of legged systems based onTheo Jansenmechanisms
Lagrangersquos method [15ndash17] is famous for derivingdynamic models Nevertheless sometimes it is very difficultto build the dynamic model of a linkage mechanism suchas the Theo Jansen linkage by using this method becausethe forward kinematics of the system becomes cumbersomeIn this paper the projection method [18ndash20] is applied toderive the complete dynamic model of a four-legged robotdriven by a single actuator and composed of Theo Jansenmechanisms that was originally proposed by Studer [21] Incomparison with the conventional approaches LagrangersquosGibbs-Appel and Kanersquos for example the projection methodhas been observed to bemore intuitive in nature and compact[18 19 22] By using this approach the linkage mechanism
can be assumed as a simple holonomic system and the modelis derived by focusing on its constraints [22] The dynamicmodel of the whole system can be established by separatingthe system into a few subcomponents and then integratingtheir dynamic models [23]
The complete dynamic analysis of Theo Jansen mecha-nisms is essential and will be conducted in the followingcontents For the sake of convenience the Jansen linkageor Jansen mechanism will be referred to as Theo Jansenmechanisms hereafter The rest of this paper is organizedas follows In Section 2 the free-fall dynamic modelingof the one-actuator four-legged robot with Theo Jansenmechanisms is presented this consists of the models of eachJansen leg and the corresponding gear system In Section 3the reaction force from the ground and friction are taken intoaccount to build the plant dynamicmodelThe control systemis designed based on energy control in Section 4 Numericalsimulations are presented in Section 5 Finally concludingremarks are given in Section 6
2 Free-Fall Model
The schematic diagram of the quadruped robot is shown inFigure 1 This quadruped robot is composed of four Jansenlinkage mechanisms and five gears which are driven by onlyone input attached to the bright yellow gear The colors redblue green and purple represent legs of left-fore right-foreleft-back and right-back respectively As amatter of practicalconvenience we define 119894 = 119903 119897 and 119895 = 119891 119887 in this paperunless otherwise noted where 119903 119897 119891 and 119887 represent theright leg left leg fore leg and back leg respectively Therobot contacts with the ground on only toes and the 119909-axisrepresents the ground Because the four legs are the sameJansen linkage mechanisms we can have the free-fall modelof the whole robot by establishing the dynamic models of the
Journal of Robotics 3
lij3
lij4
lij7
lij8
lij5lij6
lij2
lij1
dij3 120579ij3
(xij3 yij3)
(xij2 yij2)(xij1 yij1)
(xij6 yij6)
(xij8 yij8)
(xij7 yij7)
(xij5 yij5)
(xij4 yij4)
120572ij8
120572ij4
h0
dij6dij2
120579ij6
120573ij8
120573ij4
120574ij8
120574ij4
hij8
hij8
dij1
120579ij1
120579ij2
dij5
120579ij4
dij8
dij4
dij7
120579ij8
120579ij7120579ij5
XO
Yg
Figure 2 Schematic diagramof theTheo Jansen linkagemechanismwith all parameters defined The solid lines 119897
1198941198951 1198971198941198952 1198971198941198953 1198971198941198955 1198971198941198956 1198971198941198957
are the links the two blue triangular parts are treated as the masscomponents the dashed lines connect the gravity center of the massand the corners of the triangle parts
Table 1 Physical parameters of theTheo Jansen linkage mechanism(120577 120585 = 1 8)
Parameter Notation ValueInertia moment [kgsdotm2] 119869
119894119895120577001
Mass [kg] 119898119894119895120577
01
Viscous friction coefficient [Nmsdotsrad] 119862119894119895120577120585
001
Height of link-1 [m] ℎ0
002316Length of link [m] 119871
112
Length from extremity to gravity center [m] 119889119894119895120577
Length from gravity center to end [m] 119897119894119895120577
11988911989411989548
Length from gravity center to corner of triangle[m] 119897
11989411989548
ℎ11989411989548
12057211989411989548
Central angle of triangle [m] 12057311989411989548
12057411989411989548
single Jansen linkage and the gear system independently andthen integrating the two models
21 Dynamic Model of Jansen Linkage Mechanism Theschematic diagram and the coordinate system of a singleJansen linkage mechanism are illustrated in Figure 2 Thephysical parameters of the Jansen linkage mechanisms aretabulated in Table 1 The lengths of links adopted for thedesign in this study are listed in Table 3 [24] It is assumedthat the gravity center of every link locates on the center of thespecified link and the gravity center of each triangle locates
Table 2 Kinematic parameters of the Theo Jansen linkage mecha-nism
Parameter Value1198891198941198954
00606657m1198971198941198954
00844427mℎ1198941198954
00882124m1198891198941198958
00739384m1198971198941198958
0102658mℎ1198941198958
0126316m1205721198941198954
187097 rad1205731198941198954
24248 rad1205741198941198954
198742 rad1205721198941198958
157408 rad1205731198941198958
251629 rad1205741198941198958
219281 rad
Table 3 The lengths of links adopted for the Theo Jansen linkagemechanism of this study
Link Value (m)1198711
0162181198712
0054171198713
01744251198714
01176451198715
0125671198716
0117541198717
0126711198718
0179741198719
01916111987110
01616911987111
01196711987112
0217995
on vertex of threemedian linesThe angle between the gravitycenter and the corners of the triangle and the length fromthe gravity center to the corners of the triangle are calculatedutilizing the law of cosines and are given in Table 2
To construct the constraint-free dynamicmodel based onFigure 2 first of all the generalized coordinate of this systemis defined as
x119901119894119895
= [1205791198941198951 1199091198941198951
1199101198941198951
sdot sdot sdot 1205791198941198958
1199091198941198958
1199101198941198958]119879
(1)
where 120579119894119895119896
(119896 = 1 8) represents the absolute angleof each link and (119909
119894119895119896 119910119894119895119896) (119896 = 1 8) represents the
absolute coordinate of each link Since the constraint-freemodel means a model in which every element has the highestdegree of freedom as shown in Figure 3 it is only necessaryto formulate motion equations around every gravity centeraccording to Newtonrsquos second law to derive the constraint-free model In a linkage mechanism like the system of thispaper the gravity and viscous friction forces are generatedto each link [25 26] Because the viscous friction forces aregenerated in proportion to velocities thematrix formmotionequation around the gravity center (ie the constraint-free
4 Journal of Robotics
model) is represented as (2) with attention that the viscousfriction forces are generated by corresponding to the relativevelocity
M119894119895x119901119894119895
= h119894119895 (2)
where the generalized mass matrix M119894119895and the generalized
force matrix h119894119895are defined as
M119894119895= diag (119869
1198941198951 1198981198941198951 1198981198941198951 119869
1198941198958 1198981198941198958 1198981198941198958)
h119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
11986211989411989512
12060111989411989512
+ 11986211989411989514
12060111989411989514
0
minus1198981198941198951119892
minus11986211989411989512
12060111989411989512
+ 11986211989411989523
12060111989411989523
0
minus1198981198941198952119892
minus11986211989411989523
12060111989411989523
+ 11986211989411989534
12060111989411989534
+ 11986211989411989536
12060111989411989536
0
minus1198981198941198953119892
minus11986211989411989514
12060111989411989514
minus 11986211989411989534
12060111989411989534
+ 11986211989411989545
12060111989411989545
+ 11986211989411989547
12060111989411989547
0
minus1198981198941198954119892
minus11986211989411989545
12060111989411989545
+ 11986211989411989556
12060111989411989556
+ 11986211989411989558
12060111989411989558
0
minus1198981198941198955119892
minus11986211989411989536
12060111989411989536
minus 11986211989411989556
12060111989411989556
+ 11986211989411989568
12060111989411989568
0
minus1198981198941198956119892
minus11986211989411989547
12060111989411989547
+ 11986211989411989578
12060111989411989578
0
minus1198981198941198957119892
minus11986211989411989568
12060111989411989568
minus 11986211989411989578
12060111989411989578
0
minus1198981198941198958119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(3)
where 120601119894119895120577120585
= 120579119894119895120585
minus 120579119894119895120577 (120577 120585 = 1 8)
In the next step the constraint matrix C119894119895which holds
C119894119895x119901119894119895
= 0 is formulated from constraint conditions Thecoordinates of the gravity center and the length of each linksatisfy a certain relationship geometrically For example 119909
1198941198952
1199101198941198952
can be represented as follows
1199091198941198952
= 1199091198941198951
+ 1198971198941198951
cos 1205791198941198951
+ 1198891198941198952
cos 1205791198941198952
1199101198941198952
= 1199101198941198951
+ 1198971198941198951
sin 1205791198941198951
+ 1198891198941198952
sin 1205791198941198952
(4)
By moving right side to the other side (4) is represented asfollows
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
= 0
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
= 0
(5)
In addition all other gravity centers can be represented aswellas above And by forming these as matrix the holonomicconstraint relevant to the gravity center is formulated asfollows
Φℎ119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
1199091198941198953
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198953
cos 1205791198941198953
1199101198941198953
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198953
sin 1205791198941198953
1199091198941198954
minus 1199091198941198953
minus 1198971198941198953
cos 1205791198941198953
minus 1198971198941198954
cos (1205791198941198954
+ 1205721198941198954)
1199101198941198954
minus 1199101198941198953
minus 1198971198941198953
sin 1205791198941198953
minus 1198971198941198954
sin (1205791198941198954
+ 1205721198941198954)
1199091198941198954
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198954
cos 1205791198941198954
1199101198941198954
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198954
sin 1205791198941198954
1199091198941198955
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198955
cos 1205791198941198955
1199101198941198955
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198955
sin 1205791198941198955
1199091198941198956
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198971198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198971198941198956
sin 1205791198941198956
1199091198941198956
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198956
sin 1205791198941198956
1199091198941198957
minus 1199091198941198954
+ ℎ1198941198954
cos (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
cos 1205791198941198957
1199101198941198957
minus 1199101198941198954
+ ℎ1198941198954
sin (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
sin 1205791198941198957
1199091198941198958
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198891198941198958
cos 1205791198941198958
1199101198941198958
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198891198941198958
sin 1205791198941198958
1199091198941198958
minus 1199091198941198957
minus 1198971198941198957
cos 1205791198941198957
+ 1198971198941198958
cos (1205791198941198958
+ 1205721198941198958)
1199101198941198958
minus 1199101198941198957
minus 1198971198941198957
sin 1205791198941198957
+ 1198971198941198958
sin (1205791198941198958
+ 1205721198941198958)
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0
(6)
Then the constraint matrix is defined as
C119894119895=
120597Φℎ119894119895
120597x119901119894119895
(7)
The constraint dynamical system can thus be formulated byadding the constraint term (7) with Lagrangersquos multipliers 120582
119894119895
to (2) as
M119894119895x119901119894119895
= h119894119895+ C119879119894119895120582119894119895 (8)
Moreover the degree of freedom of the unconstraintsystem is found to be 24 from (1) The degrees of freedomshould be constrained by 20 holonomic constraints in this
Journal of Robotics 5
X
O
Yg
Figure 3 Schematic diagram of the constraint-free model In thissystem all gravity centers have the highest degree of freedom
system Therefore the degree of freedom of the constraineddynamical system (8) is 4
The tangent speed of the constrained system is denoted as
q119894119895= [ 1205791198941198951
1198941198951
1199101198941198951
1205791198941198952]119879
(9)
Setting a partition symbolically as k = [q119879119894119895
k119879D119894119895]119879 where
kD119894119895 shows dependent velocities with respect to q119894119895 C119894119895is
decomposed into C119894119895
= [C1198941198951
C1198941198952] satisfying C
119894119895x119901119894119895
=
C1198941198951q119894119895+ C1198941198952kD119894119895 D119894119895 is the orthogonal complement matrix
to C119894119895satisfying C
119894119895D119894119895= 0 x
119901119894119895= D119894119895q119894119895 and
D119894119895= [
I4times4
minusCminus11198941198952C1198941198951
] (10)
where I4times4 represents the identity matrix I isin R4times4Finally multiplying (8) by D119879
119894119895from the left side and
substituting the coordinate transformation x119901119894119895
= D119894119895q119894119895
into (8) can eliminate the constraint term with 120582119894119895 and the
dynamic model of the Jansen linkage mechanism is
D119879119894119895M119894119895D119894119895q119894119895+D119879119894119895M119894119895D119894119895q119894119895= D119879119894119895h119894119895 (11)
22 Dynamic Model of Gear System After the establishmentof the dynamic model of the Jansen linkage mechanism thedynamic model of the gear system [13] is derived followingthe same steps as Section 21 Table 4 gives the notations andvalues of the physical parameters of the gear system Figure 4illustrates the schematic diagram and coordinate system ofthe gear system consisting of six gears where the subscripts 120580and 119898 represent the frame of the gears and the driving gearsincluding respectively The two driving gears are driven bya single actuator and rotate synchronously Meanwhile thefour driven gears are driven by the two driving gears The
Table 4 Physical parameters of the gear system
Parameter Notation Value119869120580
001
Inertia moment [kgsdotm2] 119869119898
001
119869119894119895
001
119898120580
10
Mass [kg] 119898119898
01
119898119894119895
01
119862120580
001
Viscous friction coefficient [Nmsdotsrad] 119862119898
001
119862119894119895
001
Center distance of gears [m] 119889 01
Length of frame [m] 119897119898
119889radic2
119897119894119895
119889radic2
Radius of gears [m] 119903119898119894119895
119903119894119895
frame is used to fix all the gears All gears are noncirculargears [27ndash29] which vary their gear ratios during rotationbut the driven gears rotate one revolution with respect to onerevolution of the driving gear In addition the gear ratio ofeach gear varies depending on the angle between the drivinggear and the gear frame Based on these conditions the gearratio is defined as
119903119898119894119895
=
119889120579119861minus 120579119860
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
119889120579119860+ 2120587 minus 120579
119861
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
119903119894119895
=
1198891205872
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
11988931205872
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
(12)
where 120579119860and 120579
119861are with respect to each gait pattern of the
Jansen linkage mechanism (120579119860= 105 rad and 120579
119861= 555 rad
in this paper)The constraint-free model is derived according to
Figure 4 with parameters defined in Table 4 The generalizedcoordinate of this system is given
x119901119892
= [120579120580 119909120580 119910120580 120579119898 119909119898
119910119898
120579119894119895
119909119894119895
119910119894119895]119879
(13)
where 120579120580119898119894119895
and (119909120580119898119894119895
119910120580119898119894119895
) represent the absolute anglesand coordinates of the gear frame the driving and drivengears respectively With the generalized coordinate (13)equations of motion concerned with the gear system areformulated below
M119892x119901119892
= h119892 (14)
6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Robotics
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Y
O
Driven gear lf
Driven gear rf
(a) 2D
Driving gear 2
Driven gear lbDriving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 1 Schematic diagram of the quadruped robot composed of four Jansen linkage mechanisms and five gears which are driven by onlyone input attached to the bright yellow gear The red sky blue green and purple represent left-fore right-fore left-back and right-backrespectively
by a number of researchers Reference [11] proposed anextension of the Theo Jansen mechanism by introducingan additional up-down motion in the linkage center forrealizing new gait cycles with about ten times the heightof the original for climbing over obstacles Vector loop andsimple geometric methods were used in conjunction withsoftware tools such as ProEngineer and SAM for analyzingforward kinematics of the Theo Jansen mechanism in [12]An attempt to optimize the leg geometry of the TheoJansen mechanism using genetic algorithm was presentedin [13] The work explored the stability limits and tractiveabilities while validating the kinematic and kinetic modelsthrough experiments with hardware prototypes Howeverthese two works did not provide dynamics analysis anddiscussions Reference [14] conducted a preliminary dynamicanalysis using the superposition method with the intentionof optimizing the Theo Jansen mechanism but this work isincomplete without details on the analysis and discussions ofequivalent Lagrangersquos equation In fact the complete dynamicanalysis involving constraint forces and equivalent Lagrangersquosequation ofmotion is necessary for anymeaningful extensionandor optimization of legged systems based onTheo Jansenmechanisms
Lagrangersquos method [15ndash17] is famous for derivingdynamic models Nevertheless sometimes it is very difficultto build the dynamic model of a linkage mechanism suchas the Theo Jansen linkage by using this method becausethe forward kinematics of the system becomes cumbersomeIn this paper the projection method [18ndash20] is applied toderive the complete dynamic model of a four-legged robotdriven by a single actuator and composed of Theo Jansenmechanisms that was originally proposed by Studer [21] Incomparison with the conventional approaches LagrangersquosGibbs-Appel and Kanersquos for example the projection methodhas been observed to bemore intuitive in nature and compact[18 19 22] By using this approach the linkage mechanism
can be assumed as a simple holonomic system and the modelis derived by focusing on its constraints [22] The dynamicmodel of the whole system can be established by separatingthe system into a few subcomponents and then integratingtheir dynamic models [23]
The complete dynamic analysis of Theo Jansen mecha-nisms is essential and will be conducted in the followingcontents For the sake of convenience the Jansen linkageor Jansen mechanism will be referred to as Theo Jansenmechanisms hereafter The rest of this paper is organizedas follows In Section 2 the free-fall dynamic modelingof the one-actuator four-legged robot with Theo Jansenmechanisms is presented this consists of the models of eachJansen leg and the corresponding gear system In Section 3the reaction force from the ground and friction are taken intoaccount to build the plant dynamicmodelThe control systemis designed based on energy control in Section 4 Numericalsimulations are presented in Section 5 Finally concludingremarks are given in Section 6
2 Free-Fall Model
The schematic diagram of the quadruped robot is shown inFigure 1 This quadruped robot is composed of four Jansenlinkage mechanisms and five gears which are driven by onlyone input attached to the bright yellow gear The colors redblue green and purple represent legs of left-fore right-foreleft-back and right-back respectively As amatter of practicalconvenience we define 119894 = 119903 119897 and 119895 = 119891 119887 in this paperunless otherwise noted where 119903 119897 119891 and 119887 represent theright leg left leg fore leg and back leg respectively Therobot contacts with the ground on only toes and the 119909-axisrepresents the ground Because the four legs are the sameJansen linkage mechanisms we can have the free-fall modelof the whole robot by establishing the dynamic models of the
Journal of Robotics 3
lij3
lij4
lij7
lij8
lij5lij6
lij2
lij1
dij3 120579ij3
(xij3 yij3)
(xij2 yij2)(xij1 yij1)
(xij6 yij6)
(xij8 yij8)
(xij7 yij7)
(xij5 yij5)
(xij4 yij4)
120572ij8
120572ij4
h0
dij6dij2
120579ij6
120573ij8
120573ij4
120574ij8
120574ij4
hij8
hij8
dij1
120579ij1
120579ij2
dij5
120579ij4
dij8
dij4
dij7
120579ij8
120579ij7120579ij5
XO
Yg
Figure 2 Schematic diagramof theTheo Jansen linkagemechanismwith all parameters defined The solid lines 119897
1198941198951 1198971198941198952 1198971198941198953 1198971198941198955 1198971198941198956 1198971198941198957
are the links the two blue triangular parts are treated as the masscomponents the dashed lines connect the gravity center of the massand the corners of the triangle parts
Table 1 Physical parameters of theTheo Jansen linkage mechanism(120577 120585 = 1 8)
Parameter Notation ValueInertia moment [kgsdotm2] 119869
119894119895120577001
Mass [kg] 119898119894119895120577
01
Viscous friction coefficient [Nmsdotsrad] 119862119894119895120577120585
001
Height of link-1 [m] ℎ0
002316Length of link [m] 119871
112
Length from extremity to gravity center [m] 119889119894119895120577
Length from gravity center to end [m] 119897119894119895120577
11988911989411989548
Length from gravity center to corner of triangle[m] 119897
11989411989548
ℎ11989411989548
12057211989411989548
Central angle of triangle [m] 12057311989411989548
12057411989411989548
single Jansen linkage and the gear system independently andthen integrating the two models
21 Dynamic Model of Jansen Linkage Mechanism Theschematic diagram and the coordinate system of a singleJansen linkage mechanism are illustrated in Figure 2 Thephysical parameters of the Jansen linkage mechanisms aretabulated in Table 1 The lengths of links adopted for thedesign in this study are listed in Table 3 [24] It is assumedthat the gravity center of every link locates on the center of thespecified link and the gravity center of each triangle locates
Table 2 Kinematic parameters of the Theo Jansen linkage mecha-nism
Parameter Value1198891198941198954
00606657m1198971198941198954
00844427mℎ1198941198954
00882124m1198891198941198958
00739384m1198971198941198958
0102658mℎ1198941198958
0126316m1205721198941198954
187097 rad1205731198941198954
24248 rad1205741198941198954
198742 rad1205721198941198958
157408 rad1205731198941198958
251629 rad1205741198941198958
219281 rad
Table 3 The lengths of links adopted for the Theo Jansen linkagemechanism of this study
Link Value (m)1198711
0162181198712
0054171198713
01744251198714
01176451198715
0125671198716
0117541198717
0126711198718
0179741198719
01916111987110
01616911987111
01196711987112
0217995
on vertex of threemedian linesThe angle between the gravitycenter and the corners of the triangle and the length fromthe gravity center to the corners of the triangle are calculatedutilizing the law of cosines and are given in Table 2
To construct the constraint-free dynamicmodel based onFigure 2 first of all the generalized coordinate of this systemis defined as
x119901119894119895
= [1205791198941198951 1199091198941198951
1199101198941198951
sdot sdot sdot 1205791198941198958
1199091198941198958
1199101198941198958]119879
(1)
where 120579119894119895119896
(119896 = 1 8) represents the absolute angleof each link and (119909
119894119895119896 119910119894119895119896) (119896 = 1 8) represents the
absolute coordinate of each link Since the constraint-freemodel means a model in which every element has the highestdegree of freedom as shown in Figure 3 it is only necessaryto formulate motion equations around every gravity centeraccording to Newtonrsquos second law to derive the constraint-free model In a linkage mechanism like the system of thispaper the gravity and viscous friction forces are generatedto each link [25 26] Because the viscous friction forces aregenerated in proportion to velocities thematrix formmotionequation around the gravity center (ie the constraint-free
4 Journal of Robotics
model) is represented as (2) with attention that the viscousfriction forces are generated by corresponding to the relativevelocity
M119894119895x119901119894119895
= h119894119895 (2)
where the generalized mass matrix M119894119895and the generalized
force matrix h119894119895are defined as
M119894119895= diag (119869
1198941198951 1198981198941198951 1198981198941198951 119869
1198941198958 1198981198941198958 1198981198941198958)
h119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
11986211989411989512
12060111989411989512
+ 11986211989411989514
12060111989411989514
0
minus1198981198941198951119892
minus11986211989411989512
12060111989411989512
+ 11986211989411989523
12060111989411989523
0
minus1198981198941198952119892
minus11986211989411989523
12060111989411989523
+ 11986211989411989534
12060111989411989534
+ 11986211989411989536
12060111989411989536
0
minus1198981198941198953119892
minus11986211989411989514
12060111989411989514
minus 11986211989411989534
12060111989411989534
+ 11986211989411989545
12060111989411989545
+ 11986211989411989547
12060111989411989547
0
minus1198981198941198954119892
minus11986211989411989545
12060111989411989545
+ 11986211989411989556
12060111989411989556
+ 11986211989411989558
12060111989411989558
0
minus1198981198941198955119892
minus11986211989411989536
12060111989411989536
minus 11986211989411989556
12060111989411989556
+ 11986211989411989568
12060111989411989568
0
minus1198981198941198956119892
minus11986211989411989547
12060111989411989547
+ 11986211989411989578
12060111989411989578
0
minus1198981198941198957119892
minus11986211989411989568
12060111989411989568
minus 11986211989411989578
12060111989411989578
0
minus1198981198941198958119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(3)
where 120601119894119895120577120585
= 120579119894119895120585
minus 120579119894119895120577 (120577 120585 = 1 8)
In the next step the constraint matrix C119894119895which holds
C119894119895x119901119894119895
= 0 is formulated from constraint conditions Thecoordinates of the gravity center and the length of each linksatisfy a certain relationship geometrically For example 119909
1198941198952
1199101198941198952
can be represented as follows
1199091198941198952
= 1199091198941198951
+ 1198971198941198951
cos 1205791198941198951
+ 1198891198941198952
cos 1205791198941198952
1199101198941198952
= 1199101198941198951
+ 1198971198941198951
sin 1205791198941198951
+ 1198891198941198952
sin 1205791198941198952
(4)
By moving right side to the other side (4) is represented asfollows
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
= 0
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
= 0
(5)
In addition all other gravity centers can be represented aswellas above And by forming these as matrix the holonomicconstraint relevant to the gravity center is formulated asfollows
Φℎ119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
1199091198941198953
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198953
cos 1205791198941198953
1199101198941198953
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198953
sin 1205791198941198953
1199091198941198954
minus 1199091198941198953
minus 1198971198941198953
cos 1205791198941198953
minus 1198971198941198954
cos (1205791198941198954
+ 1205721198941198954)
1199101198941198954
minus 1199101198941198953
minus 1198971198941198953
sin 1205791198941198953
minus 1198971198941198954
sin (1205791198941198954
+ 1205721198941198954)
1199091198941198954
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198954
cos 1205791198941198954
1199101198941198954
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198954
sin 1205791198941198954
1199091198941198955
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198955
cos 1205791198941198955
1199101198941198955
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198955
sin 1205791198941198955
1199091198941198956
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198971198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198971198941198956
sin 1205791198941198956
1199091198941198956
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198956
sin 1205791198941198956
1199091198941198957
minus 1199091198941198954
+ ℎ1198941198954
cos (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
cos 1205791198941198957
1199101198941198957
minus 1199101198941198954
+ ℎ1198941198954
sin (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
sin 1205791198941198957
1199091198941198958
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198891198941198958
cos 1205791198941198958
1199101198941198958
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198891198941198958
sin 1205791198941198958
1199091198941198958
minus 1199091198941198957
minus 1198971198941198957
cos 1205791198941198957
+ 1198971198941198958
cos (1205791198941198958
+ 1205721198941198958)
1199101198941198958
minus 1199101198941198957
minus 1198971198941198957
sin 1205791198941198957
+ 1198971198941198958
sin (1205791198941198958
+ 1205721198941198958)
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0
(6)
Then the constraint matrix is defined as
C119894119895=
120597Φℎ119894119895
120597x119901119894119895
(7)
The constraint dynamical system can thus be formulated byadding the constraint term (7) with Lagrangersquos multipliers 120582
119894119895
to (2) as
M119894119895x119901119894119895
= h119894119895+ C119879119894119895120582119894119895 (8)
Moreover the degree of freedom of the unconstraintsystem is found to be 24 from (1) The degrees of freedomshould be constrained by 20 holonomic constraints in this
Journal of Robotics 5
X
O
Yg
Figure 3 Schematic diagram of the constraint-free model In thissystem all gravity centers have the highest degree of freedom
system Therefore the degree of freedom of the constraineddynamical system (8) is 4
The tangent speed of the constrained system is denoted as
q119894119895= [ 1205791198941198951
1198941198951
1199101198941198951
1205791198941198952]119879
(9)
Setting a partition symbolically as k = [q119879119894119895
k119879D119894119895]119879 where
kD119894119895 shows dependent velocities with respect to q119894119895 C119894119895is
decomposed into C119894119895
= [C1198941198951
C1198941198952] satisfying C
119894119895x119901119894119895
=
C1198941198951q119894119895+ C1198941198952kD119894119895 D119894119895 is the orthogonal complement matrix
to C119894119895satisfying C
119894119895D119894119895= 0 x
119901119894119895= D119894119895q119894119895 and
D119894119895= [
I4times4
minusCminus11198941198952C1198941198951
] (10)
where I4times4 represents the identity matrix I isin R4times4Finally multiplying (8) by D119879
119894119895from the left side and
substituting the coordinate transformation x119901119894119895
= D119894119895q119894119895
into (8) can eliminate the constraint term with 120582119894119895 and the
dynamic model of the Jansen linkage mechanism is
D119879119894119895M119894119895D119894119895q119894119895+D119879119894119895M119894119895D119894119895q119894119895= D119879119894119895h119894119895 (11)
22 Dynamic Model of Gear System After the establishmentof the dynamic model of the Jansen linkage mechanism thedynamic model of the gear system [13] is derived followingthe same steps as Section 21 Table 4 gives the notations andvalues of the physical parameters of the gear system Figure 4illustrates the schematic diagram and coordinate system ofthe gear system consisting of six gears where the subscripts 120580and 119898 represent the frame of the gears and the driving gearsincluding respectively The two driving gears are driven bya single actuator and rotate synchronously Meanwhile thefour driven gears are driven by the two driving gears The
Table 4 Physical parameters of the gear system
Parameter Notation Value119869120580
001
Inertia moment [kgsdotm2] 119869119898
001
119869119894119895
001
119898120580
10
Mass [kg] 119898119898
01
119898119894119895
01
119862120580
001
Viscous friction coefficient [Nmsdotsrad] 119862119898
001
119862119894119895
001
Center distance of gears [m] 119889 01
Length of frame [m] 119897119898
119889radic2
119897119894119895
119889radic2
Radius of gears [m] 119903119898119894119895
119903119894119895
frame is used to fix all the gears All gears are noncirculargears [27ndash29] which vary their gear ratios during rotationbut the driven gears rotate one revolution with respect to onerevolution of the driving gear In addition the gear ratio ofeach gear varies depending on the angle between the drivinggear and the gear frame Based on these conditions the gearratio is defined as
119903119898119894119895
=
119889120579119861minus 120579119860
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
119889120579119860+ 2120587 minus 120579
119861
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
119903119894119895
=
1198891205872
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
11988931205872
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
(12)
where 120579119860and 120579
119861are with respect to each gait pattern of the
Jansen linkage mechanism (120579119860= 105 rad and 120579
119861= 555 rad
in this paper)The constraint-free model is derived according to
Figure 4 with parameters defined in Table 4 The generalizedcoordinate of this system is given
x119901119892
= [120579120580 119909120580 119910120580 120579119898 119909119898
119910119898
120579119894119895
119909119894119895
119910119894119895]119879
(13)
where 120579120580119898119894119895
and (119909120580119898119894119895
119910120580119898119894119895
) represent the absolute anglesand coordinates of the gear frame the driving and drivengears respectively With the generalized coordinate (13)equations of motion concerned with the gear system areformulated below
M119892x119901119892
= h119892 (14)
6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 3
lij3
lij4
lij7
lij8
lij5lij6
lij2
lij1
dij3 120579ij3
(xij3 yij3)
(xij2 yij2)(xij1 yij1)
(xij6 yij6)
(xij8 yij8)
(xij7 yij7)
(xij5 yij5)
(xij4 yij4)
120572ij8
120572ij4
h0
dij6dij2
120579ij6
120573ij8
120573ij4
120574ij8
120574ij4
hij8
hij8
dij1
120579ij1
120579ij2
dij5
120579ij4
dij8
dij4
dij7
120579ij8
120579ij7120579ij5
XO
Yg
Figure 2 Schematic diagramof theTheo Jansen linkagemechanismwith all parameters defined The solid lines 119897
1198941198951 1198971198941198952 1198971198941198953 1198971198941198955 1198971198941198956 1198971198941198957
are the links the two blue triangular parts are treated as the masscomponents the dashed lines connect the gravity center of the massand the corners of the triangle parts
Table 1 Physical parameters of theTheo Jansen linkage mechanism(120577 120585 = 1 8)
Parameter Notation ValueInertia moment [kgsdotm2] 119869
119894119895120577001
Mass [kg] 119898119894119895120577
01
Viscous friction coefficient [Nmsdotsrad] 119862119894119895120577120585
001
Height of link-1 [m] ℎ0
002316Length of link [m] 119871
112
Length from extremity to gravity center [m] 119889119894119895120577
Length from gravity center to end [m] 119897119894119895120577
11988911989411989548
Length from gravity center to corner of triangle[m] 119897
11989411989548
ℎ11989411989548
12057211989411989548
Central angle of triangle [m] 12057311989411989548
12057411989411989548
single Jansen linkage and the gear system independently andthen integrating the two models
21 Dynamic Model of Jansen Linkage Mechanism Theschematic diagram and the coordinate system of a singleJansen linkage mechanism are illustrated in Figure 2 Thephysical parameters of the Jansen linkage mechanisms aretabulated in Table 1 The lengths of links adopted for thedesign in this study are listed in Table 3 [24] It is assumedthat the gravity center of every link locates on the center of thespecified link and the gravity center of each triangle locates
Table 2 Kinematic parameters of the Theo Jansen linkage mecha-nism
Parameter Value1198891198941198954
00606657m1198971198941198954
00844427mℎ1198941198954
00882124m1198891198941198958
00739384m1198971198941198958
0102658mℎ1198941198958
0126316m1205721198941198954
187097 rad1205731198941198954
24248 rad1205741198941198954
198742 rad1205721198941198958
157408 rad1205731198941198958
251629 rad1205741198941198958
219281 rad
Table 3 The lengths of links adopted for the Theo Jansen linkagemechanism of this study
Link Value (m)1198711
0162181198712
0054171198713
01744251198714
01176451198715
0125671198716
0117541198717
0126711198718
0179741198719
01916111987110
01616911987111
01196711987112
0217995
on vertex of threemedian linesThe angle between the gravitycenter and the corners of the triangle and the length fromthe gravity center to the corners of the triangle are calculatedutilizing the law of cosines and are given in Table 2
To construct the constraint-free dynamicmodel based onFigure 2 first of all the generalized coordinate of this systemis defined as
x119901119894119895
= [1205791198941198951 1199091198941198951
1199101198941198951
sdot sdot sdot 1205791198941198958
1199091198941198958
1199101198941198958]119879
(1)
where 120579119894119895119896
(119896 = 1 8) represents the absolute angleof each link and (119909
119894119895119896 119910119894119895119896) (119896 = 1 8) represents the
absolute coordinate of each link Since the constraint-freemodel means a model in which every element has the highestdegree of freedom as shown in Figure 3 it is only necessaryto formulate motion equations around every gravity centeraccording to Newtonrsquos second law to derive the constraint-free model In a linkage mechanism like the system of thispaper the gravity and viscous friction forces are generatedto each link [25 26] Because the viscous friction forces aregenerated in proportion to velocities thematrix formmotionequation around the gravity center (ie the constraint-free
4 Journal of Robotics
model) is represented as (2) with attention that the viscousfriction forces are generated by corresponding to the relativevelocity
M119894119895x119901119894119895
= h119894119895 (2)
where the generalized mass matrix M119894119895and the generalized
force matrix h119894119895are defined as
M119894119895= diag (119869
1198941198951 1198981198941198951 1198981198941198951 119869
1198941198958 1198981198941198958 1198981198941198958)
h119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
11986211989411989512
12060111989411989512
+ 11986211989411989514
12060111989411989514
0
minus1198981198941198951119892
minus11986211989411989512
12060111989411989512
+ 11986211989411989523
12060111989411989523
0
minus1198981198941198952119892
minus11986211989411989523
12060111989411989523
+ 11986211989411989534
12060111989411989534
+ 11986211989411989536
12060111989411989536
0
minus1198981198941198953119892
minus11986211989411989514
12060111989411989514
minus 11986211989411989534
12060111989411989534
+ 11986211989411989545
12060111989411989545
+ 11986211989411989547
12060111989411989547
0
minus1198981198941198954119892
minus11986211989411989545
12060111989411989545
+ 11986211989411989556
12060111989411989556
+ 11986211989411989558
12060111989411989558
0
minus1198981198941198955119892
minus11986211989411989536
12060111989411989536
minus 11986211989411989556
12060111989411989556
+ 11986211989411989568
12060111989411989568
0
minus1198981198941198956119892
minus11986211989411989547
12060111989411989547
+ 11986211989411989578
12060111989411989578
0
minus1198981198941198957119892
minus11986211989411989568
12060111989411989568
minus 11986211989411989578
12060111989411989578
0
minus1198981198941198958119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(3)
where 120601119894119895120577120585
= 120579119894119895120585
minus 120579119894119895120577 (120577 120585 = 1 8)
In the next step the constraint matrix C119894119895which holds
C119894119895x119901119894119895
= 0 is formulated from constraint conditions Thecoordinates of the gravity center and the length of each linksatisfy a certain relationship geometrically For example 119909
1198941198952
1199101198941198952
can be represented as follows
1199091198941198952
= 1199091198941198951
+ 1198971198941198951
cos 1205791198941198951
+ 1198891198941198952
cos 1205791198941198952
1199101198941198952
= 1199101198941198951
+ 1198971198941198951
sin 1205791198941198951
+ 1198891198941198952
sin 1205791198941198952
(4)
By moving right side to the other side (4) is represented asfollows
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
= 0
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
= 0
(5)
In addition all other gravity centers can be represented aswellas above And by forming these as matrix the holonomicconstraint relevant to the gravity center is formulated asfollows
Φℎ119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
1199091198941198953
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198953
cos 1205791198941198953
1199101198941198953
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198953
sin 1205791198941198953
1199091198941198954
minus 1199091198941198953
minus 1198971198941198953
cos 1205791198941198953
minus 1198971198941198954
cos (1205791198941198954
+ 1205721198941198954)
1199101198941198954
minus 1199101198941198953
minus 1198971198941198953
sin 1205791198941198953
minus 1198971198941198954
sin (1205791198941198954
+ 1205721198941198954)
1199091198941198954
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198954
cos 1205791198941198954
1199101198941198954
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198954
sin 1205791198941198954
1199091198941198955
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198955
cos 1205791198941198955
1199101198941198955
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198955
sin 1205791198941198955
1199091198941198956
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198971198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198971198941198956
sin 1205791198941198956
1199091198941198956
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198956
sin 1205791198941198956
1199091198941198957
minus 1199091198941198954
+ ℎ1198941198954
cos (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
cos 1205791198941198957
1199101198941198957
minus 1199101198941198954
+ ℎ1198941198954
sin (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
sin 1205791198941198957
1199091198941198958
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198891198941198958
cos 1205791198941198958
1199101198941198958
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198891198941198958
sin 1205791198941198958
1199091198941198958
minus 1199091198941198957
minus 1198971198941198957
cos 1205791198941198957
+ 1198971198941198958
cos (1205791198941198958
+ 1205721198941198958)
1199101198941198958
minus 1199101198941198957
minus 1198971198941198957
sin 1205791198941198957
+ 1198971198941198958
sin (1205791198941198958
+ 1205721198941198958)
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0
(6)
Then the constraint matrix is defined as
C119894119895=
120597Φℎ119894119895
120597x119901119894119895
(7)
The constraint dynamical system can thus be formulated byadding the constraint term (7) with Lagrangersquos multipliers 120582
119894119895
to (2) as
M119894119895x119901119894119895
= h119894119895+ C119879119894119895120582119894119895 (8)
Moreover the degree of freedom of the unconstraintsystem is found to be 24 from (1) The degrees of freedomshould be constrained by 20 holonomic constraints in this
Journal of Robotics 5
X
O
Yg
Figure 3 Schematic diagram of the constraint-free model In thissystem all gravity centers have the highest degree of freedom
system Therefore the degree of freedom of the constraineddynamical system (8) is 4
The tangent speed of the constrained system is denoted as
q119894119895= [ 1205791198941198951
1198941198951
1199101198941198951
1205791198941198952]119879
(9)
Setting a partition symbolically as k = [q119879119894119895
k119879D119894119895]119879 where
kD119894119895 shows dependent velocities with respect to q119894119895 C119894119895is
decomposed into C119894119895
= [C1198941198951
C1198941198952] satisfying C
119894119895x119901119894119895
=
C1198941198951q119894119895+ C1198941198952kD119894119895 D119894119895 is the orthogonal complement matrix
to C119894119895satisfying C
119894119895D119894119895= 0 x
119901119894119895= D119894119895q119894119895 and
D119894119895= [
I4times4
minusCminus11198941198952C1198941198951
] (10)
where I4times4 represents the identity matrix I isin R4times4Finally multiplying (8) by D119879
119894119895from the left side and
substituting the coordinate transformation x119901119894119895
= D119894119895q119894119895
into (8) can eliminate the constraint term with 120582119894119895 and the
dynamic model of the Jansen linkage mechanism is
D119879119894119895M119894119895D119894119895q119894119895+D119879119894119895M119894119895D119894119895q119894119895= D119879119894119895h119894119895 (11)
22 Dynamic Model of Gear System After the establishmentof the dynamic model of the Jansen linkage mechanism thedynamic model of the gear system [13] is derived followingthe same steps as Section 21 Table 4 gives the notations andvalues of the physical parameters of the gear system Figure 4illustrates the schematic diagram and coordinate system ofthe gear system consisting of six gears where the subscripts 120580and 119898 represent the frame of the gears and the driving gearsincluding respectively The two driving gears are driven bya single actuator and rotate synchronously Meanwhile thefour driven gears are driven by the two driving gears The
Table 4 Physical parameters of the gear system
Parameter Notation Value119869120580
001
Inertia moment [kgsdotm2] 119869119898
001
119869119894119895
001
119898120580
10
Mass [kg] 119898119898
01
119898119894119895
01
119862120580
001
Viscous friction coefficient [Nmsdotsrad] 119862119898
001
119862119894119895
001
Center distance of gears [m] 119889 01
Length of frame [m] 119897119898
119889radic2
119897119894119895
119889radic2
Radius of gears [m] 119903119898119894119895
119903119894119895
frame is used to fix all the gears All gears are noncirculargears [27ndash29] which vary their gear ratios during rotationbut the driven gears rotate one revolution with respect to onerevolution of the driving gear In addition the gear ratio ofeach gear varies depending on the angle between the drivinggear and the gear frame Based on these conditions the gearratio is defined as
119903119898119894119895
=
119889120579119861minus 120579119860
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
119889120579119860+ 2120587 minus 120579
119861
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
119903119894119895
=
1198891205872
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
11988931205872
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
(12)
where 120579119860and 120579
119861are with respect to each gait pattern of the
Jansen linkage mechanism (120579119860= 105 rad and 120579
119861= 555 rad
in this paper)The constraint-free model is derived according to
Figure 4 with parameters defined in Table 4 The generalizedcoordinate of this system is given
x119901119892
= [120579120580 119909120580 119910120580 120579119898 119909119898
119910119898
120579119894119895
119909119894119895
119910119894119895]119879
(13)
where 120579120580119898119894119895
and (119909120580119898119894119895
119910120580119898119894119895
) represent the absolute anglesand coordinates of the gear frame the driving and drivengears respectively With the generalized coordinate (13)equations of motion concerned with the gear system areformulated below
M119892x119901119892
= h119892 (14)
6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Robotics
model) is represented as (2) with attention that the viscousfriction forces are generated by corresponding to the relativevelocity
M119894119895x119901119894119895
= h119894119895 (2)
where the generalized mass matrix M119894119895and the generalized
force matrix h119894119895are defined as
M119894119895= diag (119869
1198941198951 1198981198941198951 1198981198941198951 119869
1198941198958 1198981198941198958 1198981198941198958)
h119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
11986211989411989512
12060111989411989512
+ 11986211989411989514
12060111989411989514
0
minus1198981198941198951119892
minus11986211989411989512
12060111989411989512
+ 11986211989411989523
12060111989411989523
0
minus1198981198941198952119892
minus11986211989411989523
12060111989411989523
+ 11986211989411989534
12060111989411989534
+ 11986211989411989536
12060111989411989536
0
minus1198981198941198953119892
minus11986211989411989514
12060111989411989514
minus 11986211989411989534
12060111989411989534
+ 11986211989411989545
12060111989411989545
+ 11986211989411989547
12060111989411989547
0
minus1198981198941198954119892
minus11986211989411989545
12060111989411989545
+ 11986211989411989556
12060111989411989556
+ 11986211989411989558
12060111989411989558
0
minus1198981198941198955119892
minus11986211989411989536
12060111989411989536
minus 11986211989411989556
12060111989411989556
+ 11986211989411989568
12060111989411989568
0
minus1198981198941198956119892
minus11986211989411989547
12060111989411989547
+ 11986211989411989578
12060111989411989578
0
minus1198981198941198957119892
minus11986211989411989568
12060111989411989568
minus 11986211989411989578
12060111989411989578
0
minus1198981198941198958119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(3)
where 120601119894119895120577120585
= 120579119894119895120585
minus 120579119894119895120577 (120577 120585 = 1 8)
In the next step the constraint matrix C119894119895which holds
C119894119895x119901119894119895
= 0 is formulated from constraint conditions Thecoordinates of the gravity center and the length of each linksatisfy a certain relationship geometrically For example 119909
1198941198952
1199101198941198952
can be represented as follows
1199091198941198952
= 1199091198941198951
+ 1198971198941198951
cos 1205791198941198951
+ 1198891198941198952
cos 1205791198941198952
1199101198941198952
= 1199101198941198951
+ 1198971198941198951
sin 1205791198941198951
+ 1198891198941198952
sin 1205791198941198952
(4)
By moving right side to the other side (4) is represented asfollows
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
= 0
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
= 0
(5)
In addition all other gravity centers can be represented aswellas above And by forming these as matrix the holonomicconstraint relevant to the gravity center is formulated asfollows
Φℎ119894119895
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1199091198941198952
minus 1199091198941198951
minus 1198971198941198951
cos 1205791198941198951
minus 1198891198941198952
cos 1205791198941198952
1199101198941198952
minus 1199101198941198951
minus 1198971198941198951
sin 1205791198941198951
minus 1198891198941198952
sin 1205791198941198952
1199091198941198953
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198953
cos 1205791198941198953
1199101198941198953
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198953
sin 1205791198941198953
1199091198941198954
minus 1199091198941198953
minus 1198971198941198953
cos 1205791198941198953
minus 1198971198941198954
cos (1205791198941198954
+ 1205721198941198954)
1199101198941198954
minus 1199101198941198953
minus 1198971198941198953
sin 1205791198941198953
minus 1198971198941198954
sin (1205791198941198954
+ 1205721198941198954)
1199091198941198954
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198954
cos 1205791198941198954
1199101198941198954
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198954
sin 1205791198941198954
1199091198941198955
minus 1199091198941198951
+ 1198891198941198951
cos 1205791198941198951
minus 1198891198941198955
cos 1205791198941198955
1199101198941198955
minus 1199101198941198951
+ 1198891198941198951
sin 1205791198941198951
minus 1198891198941198955
sin 1205791198941198955
1199091198941198956
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198971198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198971198941198956
sin 1205791198941198956
1199091198941198956
minus 1199091198941198952
minus 1198971198941198952
cos 1205791198941198952
minus 1198891198941198956
cos 1205791198941198956
1199101198941198956
minus 1199101198941198952
minus 1198971198941198952
sin 1205791198941198952
minus 1198891198941198956
sin 1205791198941198956
1199091198941198957
minus 1199091198941198954
+ ℎ1198941198954
cos (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
cos 1205791198941198957
1199101198941198957
minus 1199101198941198954
+ ℎ1198941198954
sin (1205791198941198954
minus 1205741198941198954) minus 1198891198941198957
sin 1205791198941198957
1199091198941198958
minus 1199091198941198955
minus 1198971198941198955
cos 1205791198941198955
+ 1198891198941198958
cos 1205791198941198958
1199101198941198958
minus 1199101198941198955
minus 1198971198941198955
sin 1205791198941198955
+ 1198891198941198958
sin 1205791198941198958
1199091198941198958
minus 1199091198941198957
minus 1198971198941198957
cos 1205791198941198957
+ 1198971198941198958
cos (1205791198941198958
+ 1205721198941198958)
1199101198941198958
minus 1199101198941198957
minus 1198971198941198957
sin 1205791198941198957
+ 1198971198941198958
sin (1205791198941198958
+ 1205721198941198958)
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0
(6)
Then the constraint matrix is defined as
C119894119895=
120597Φℎ119894119895
120597x119901119894119895
(7)
The constraint dynamical system can thus be formulated byadding the constraint term (7) with Lagrangersquos multipliers 120582
119894119895
to (2) as
M119894119895x119901119894119895
= h119894119895+ C119879119894119895120582119894119895 (8)
Moreover the degree of freedom of the unconstraintsystem is found to be 24 from (1) The degrees of freedomshould be constrained by 20 holonomic constraints in this
Journal of Robotics 5
X
O
Yg
Figure 3 Schematic diagram of the constraint-free model In thissystem all gravity centers have the highest degree of freedom
system Therefore the degree of freedom of the constraineddynamical system (8) is 4
The tangent speed of the constrained system is denoted as
q119894119895= [ 1205791198941198951
1198941198951
1199101198941198951
1205791198941198952]119879
(9)
Setting a partition symbolically as k = [q119879119894119895
k119879D119894119895]119879 where
kD119894119895 shows dependent velocities with respect to q119894119895 C119894119895is
decomposed into C119894119895
= [C1198941198951
C1198941198952] satisfying C
119894119895x119901119894119895
=
C1198941198951q119894119895+ C1198941198952kD119894119895 D119894119895 is the orthogonal complement matrix
to C119894119895satisfying C
119894119895D119894119895= 0 x
119901119894119895= D119894119895q119894119895 and
D119894119895= [
I4times4
minusCminus11198941198952C1198941198951
] (10)
where I4times4 represents the identity matrix I isin R4times4Finally multiplying (8) by D119879
119894119895from the left side and
substituting the coordinate transformation x119901119894119895
= D119894119895q119894119895
into (8) can eliminate the constraint term with 120582119894119895 and the
dynamic model of the Jansen linkage mechanism is
D119879119894119895M119894119895D119894119895q119894119895+D119879119894119895M119894119895D119894119895q119894119895= D119879119894119895h119894119895 (11)
22 Dynamic Model of Gear System After the establishmentof the dynamic model of the Jansen linkage mechanism thedynamic model of the gear system [13] is derived followingthe same steps as Section 21 Table 4 gives the notations andvalues of the physical parameters of the gear system Figure 4illustrates the schematic diagram and coordinate system ofthe gear system consisting of six gears where the subscripts 120580and 119898 represent the frame of the gears and the driving gearsincluding respectively The two driving gears are driven bya single actuator and rotate synchronously Meanwhile thefour driven gears are driven by the two driving gears The
Table 4 Physical parameters of the gear system
Parameter Notation Value119869120580
001
Inertia moment [kgsdotm2] 119869119898
001
119869119894119895
001
119898120580
10
Mass [kg] 119898119898
01
119898119894119895
01
119862120580
001
Viscous friction coefficient [Nmsdotsrad] 119862119898
001
119862119894119895
001
Center distance of gears [m] 119889 01
Length of frame [m] 119897119898
119889radic2
119897119894119895
119889radic2
Radius of gears [m] 119903119898119894119895
119903119894119895
frame is used to fix all the gears All gears are noncirculargears [27ndash29] which vary their gear ratios during rotationbut the driven gears rotate one revolution with respect to onerevolution of the driving gear In addition the gear ratio ofeach gear varies depending on the angle between the drivinggear and the gear frame Based on these conditions the gearratio is defined as
119903119898119894119895
=
119889120579119861minus 120579119860
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
119889120579119860+ 2120587 minus 120579
119861
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
119903119894119895
=
1198891205872
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
11988931205872
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
(12)
where 120579119860and 120579
119861are with respect to each gait pattern of the
Jansen linkage mechanism (120579119860= 105 rad and 120579
119861= 555 rad
in this paper)The constraint-free model is derived according to
Figure 4 with parameters defined in Table 4 The generalizedcoordinate of this system is given
x119901119892
= [120579120580 119909120580 119910120580 120579119898 119909119898
119910119898
120579119894119895
119909119894119895
119910119894119895]119879
(13)
where 120579120580119898119894119895
and (119909120580119898119894119895
119910120580119898119894119895
) represent the absolute anglesand coordinates of the gear frame the driving and drivengears respectively With the generalized coordinate (13)equations of motion concerned with the gear system areformulated below
M119892x119901119892
= h119892 (14)
6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 5
X
O
Yg
Figure 3 Schematic diagram of the constraint-free model In thissystem all gravity centers have the highest degree of freedom
system Therefore the degree of freedom of the constraineddynamical system (8) is 4
The tangent speed of the constrained system is denoted as
q119894119895= [ 1205791198941198951
1198941198951
1199101198941198951
1205791198941198952]119879
(9)
Setting a partition symbolically as k = [q119879119894119895
k119879D119894119895]119879 where
kD119894119895 shows dependent velocities with respect to q119894119895 C119894119895is
decomposed into C119894119895
= [C1198941198951
C1198941198952] satisfying C
119894119895x119901119894119895
=
C1198941198951q119894119895+ C1198941198952kD119894119895 D119894119895 is the orthogonal complement matrix
to C119894119895satisfying C
119894119895D119894119895= 0 x
119901119894119895= D119894119895q119894119895 and
D119894119895= [
I4times4
minusCminus11198941198952C1198941198951
] (10)
where I4times4 represents the identity matrix I isin R4times4Finally multiplying (8) by D119879
119894119895from the left side and
substituting the coordinate transformation x119901119894119895
= D119894119895q119894119895
into (8) can eliminate the constraint term with 120582119894119895 and the
dynamic model of the Jansen linkage mechanism is
D119879119894119895M119894119895D119894119895q119894119895+D119879119894119895M119894119895D119894119895q119894119895= D119879119894119895h119894119895 (11)
22 Dynamic Model of Gear System After the establishmentof the dynamic model of the Jansen linkage mechanism thedynamic model of the gear system [13] is derived followingthe same steps as Section 21 Table 4 gives the notations andvalues of the physical parameters of the gear system Figure 4illustrates the schematic diagram and coordinate system ofthe gear system consisting of six gears where the subscripts 120580and 119898 represent the frame of the gears and the driving gearsincluding respectively The two driving gears are driven bya single actuator and rotate synchronously Meanwhile thefour driven gears are driven by the two driving gears The
Table 4 Physical parameters of the gear system
Parameter Notation Value119869120580
001
Inertia moment [kgsdotm2] 119869119898
001
119869119894119895
001
119898120580
10
Mass [kg] 119898119898
01
119898119894119895
01
119862120580
001
Viscous friction coefficient [Nmsdotsrad] 119862119898
001
119862119894119895
001
Center distance of gears [m] 119889 01
Length of frame [m] 119897119898
119889radic2
119897119894119895
119889radic2
Radius of gears [m] 119903119898119894119895
119903119894119895
frame is used to fix all the gears All gears are noncirculargears [27ndash29] which vary their gear ratios during rotationbut the driven gears rotate one revolution with respect to onerevolution of the driving gear In addition the gear ratio ofeach gear varies depending on the angle between the drivinggear and the gear frame Based on these conditions the gearratio is defined as
119903119898119894119895
=
119889120579119861minus 120579119860
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
119889120579119860+ 2120587 minus 120579
119861
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
119903119894119895
=
1198891205872
120579119861minus 120579119860+ 1205872
(High Speed Ratio)
11988931205872
120579119860+ 2120587 minus 120579
119861+ 31205872
(Low Speed Ratio)
(12)
where 120579119860and 120579
119861are with respect to each gait pattern of the
Jansen linkage mechanism (120579119860= 105 rad and 120579
119861= 555 rad
in this paper)The constraint-free model is derived according to
Figure 4 with parameters defined in Table 4 The generalizedcoordinate of this system is given
x119901119892
= [120579120580 119909120580 119910120580 120579119898 119909119898
119910119898
120579119894119895
119909119894119895
119910119894119895]119879
(13)
where 120579120580119898119894119895
and (119909120580119898119894119895
119910120580119898119894119895
) represent the absolute anglesand coordinates of the gear frame the driving and drivengears respectively With the generalized coordinate (13)equations of motion concerned with the gear system areformulated below
M119892x119901119892
= h119892 (14)
6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Robotics
XO
Y
g
Driving gear 2
Driven gear
Driven gear lb
Driving gear 1
Driven gear
Driven gear rb
lrblb
lm
120579b
120579m
120579lb
120579rb
120579
r
120579
r
rrb
rlb
rmrb
rmr
rmlf
rmlb
120591
lrflf
rf
rf
rf
lf
lf
f
lf
(a) 2D
Driving gear 2
Driven gear lb
Driving gear 1
Driven gear rb
X
Z
Y
Driven gear lfDriven gear rf
(b) 3D
Figure 4 Schematic diagram of the gear system with parameters definedThe black-margined gear represents the driving gear and the othergears represent the driven gears The driving gear 1 and the driving gear 2 rotate synchronously
where
M119892= diag (119869
120580 119898120580 119898120580 119869119898 119898119898 119898119898 119869119894119895 119898119894119895 119898119894119895)
h119892=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
minus120591 + 119862119898( 120579120580minus 120579119898) + 119862119894119895( 120579120580minus 120579119894119895)
0
minus119898120580119892
120591 minus 119862119898( 120579120580minus 120579119898)
0
minus119898119898119892
minus119862119903119891( 120579120580minus 120579119903119891)
0
minus119898119903119891119892
minus119862119903119887( 120579120580minus 120579119903119887)
0
minus119898119903119887119892
minus119862119897119891( 120579120580minus 120579119897119891)
0
minus119898119897119891119892
minus119862119897119887( 120579120580minus 120579119897119887)
0
minus119898119897119887119892
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
(15)
with 120591 representing the input torque
The coordinates of the gravity center and the lengthof each link are correlated geometrically And the rotationangles and radius of gears also conform to some relationshipBased on these relationships the holonomic constraints areformulated as follows For the gravity centers and gear ratiothe holonomic constraints are formulated as follows
Φℎ119892
=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
119909119898minus 119909120580minus 119897119898sin 120579120580
119910119898minus 119910120580minus 119897119898cos 120579120580
120579119903119891+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
119909119903119891minus 119909120580+ 119897119903119891cos 120579120580
119910119903119891minus 119910120580+ 119897119903119891sin 120579120580
120579119903119887+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
119909119903119887minus 119909120580minus 119897119903119887cos 120579120580
119910119903119887minus 119910120580minus 119897119903119887sin 120579120580
120579119897119891+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
119909119897119891minus 119909120580+ 119897119897119891cos 120579120580
119910119897119891minus 119910120580+ 119897119897119891sin 120579120580
120579119897119887+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903l119887119903119897119887
120579120580
119909119897119887minus 119909120580minus 119897119897119887cos 120579120580
119910119897119887minus 119910120580minus 119897119897119887sin 120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (16)
Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 7
The corresponding constraint matrix C119892
which holdsC119892x119901119892
= 0 is defined as
C119892=
120597Φℎ119892
120597x119901119892
(17)
Subsequently the constraint dynamical model can thus beobtained by adding the constraint matrix with Lagrangersquosmultipliers 120582
119892to (14) as
M119892x119901119892
= h119892+ C119879119892120582119892 (18)
The degrees of freedom of the unconstraint system arefound to be 18 from (13) which should be constrained by 14holonomic constraints in this system Therefore the degreeof freedom of the constrained dynamical system is 4 Thetangent speed of the constrained system is
q119892= [ 120579120580120580
119910120580
120579119898]119879
(19)
The orthogonal complementmatrixD119892is obtained according
to the same steps as Section 21 Multiplying (18) by D119879119892from
the left side and substituting the coordinate transformationx119901119892
= D119892q119892into (18) yield the dynamic model of Figure 4
D119879119892M119892D119892q119892+D119879119892M119892D119892q119892= D119879119892h119892 (20)
23 System Integration Up till now the dynamic models ofthe Jansen linkage mechanisms and the gear system havealready been established Then the whole constraint-freedynamic model of the quadruped robot can be obtained byintegrating (11) and (20)
Mx119901= h (21)
where
x119901= [q119879119892
q119879119903119891
q119879119897119891
q119879119903119887
q119879119897119887]119879
M = diag (D119879119903119891M119903119891D119903119891D119879119897119891M119897119891D119897119891D119879119903119887M119903119887D119903119887
D119879119897119887M119897119887D119897119887)
h =
[[[[[[
[
D119879119903119891h119903119891minusD119879119903119891M119903119891D119903119891q119903119891
D119879119897119891h119897119891minusD119879119897119891M119897119891D119897119891q119897119891
D119879119903119887h119903119887minusD119879119903119887M119903119887D119903119887q119903119887
D119879119897119887h119897119887minusD119879119897119887M119897119887D119897119887q119897119887
]]]]]]
]
(22)
Again given the holonomic constraints of the gravity centerof each link
Φℎ=
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
[
1205791199031198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091199031198911
minus 119909120580+ 119897119903119891cos 120579120580+ 1198971199031198911
cos 1205791199031198911
1199101199031198911
minus 119910120580+ 119897119903119891sin 120579120580+ 1198971199031198911
sin 1205791199031198911
1205791199031198912
+
119903119898119903119891
119903119903119891
120579119898minus
119903119898119903119891
+ 119903119903119891
119903119903119891
120579120580
1205791199031198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091199031198871
minus 119909120580minus 119897119903119887cos 120579120580+ 1198971199031198871
cos 1205791199031198871
1199101199031198871
minus 119910120580minus 119897119903119887sin 120579120580+ 1198971199031198871
sin 1205791199031198871
1205791199031198872
+119903119898119903119887
119903119903119887
120579119898minus119903119898119903119887
+ 119903119903119887
119903119903119887
120579120580
1205791198971198911
minus 120579120580minus tanminus1 (1198711
ℎ0
)
1199091198971198911
minus 119909120580+ 119897119897119891cos 120579120580+ 1198971198971198911
cos 1205791198971198911
1199101198971198911
minus 119910120580+ 119897119897119891sin 120579120580+ 1198971198971198911
sin 1205791198971198911
1205791198971198912
+
119903119898119897119891
119903119897119891
120579119898minus
119903119898119897119891
+ 119903119897119891
119903119897119891
120579120580
1205791198971198871
minus 120579120580minus tanminus1 (minus1198711
ℎ0
)
1199091198971198871
minus 119909120580minus 119897119897119887cos 120579120580+ 1198971198971198871
cos 1205791198971198871
1199101198971198871
minus 119910120580minus 119897119897119887sin 120579120580+ 1198971198971198871
sin 1205791198971198871
1205791198971198872
+119903119898119897119887
119903119897119887
120579119898minus119903119898119897119887
+ 119903119897119887
119903119897119887
120579120580
]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]]
]
= 0 (23)
the constraint dynamical system is thus
Mx119901= h + C119879120582 (24)
where
C =120597Φℎ
120597x119901
(25)
From (21) we find that the degrees of freedom of theunconstraint system are 20 and constrained by 16 holonomicconstraints Hence the degree of freedom of the constraineddynamical system is 4
Finally bymultiplying (24) byD119879 (whereD is the orthog-onal complement matrix) from the left side and substitutingthe coordinate transformation x
119901= Dq into (24) the
dynamic free-falling model is
D119879MDq +D119879MDq = D119879h (26)
where
q = [ 120579120580120580
119910120580
120579119898]119879 (27)
is the tangent speed of the constrained system which is thesame as that of the gear system
8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Robotics
3 Plant Model
The dynamic model (26) is the free-fall model which doesnot include reaction force from the ground However suchforce exists and can not be neglected in real situation In thissection the dynamicmodel including the floor reaction forceand the collision with the ground is established by expandingthe free-fall model
Our previous study has shown that the toes of the Jansenlinkage mechanisms slip consistently while walking [30]Hence the further dynamic model considering friction isformulated in this section by assuming that the coefficient offriction is uniform
31 Contact with the Ground We consider the floor reactionforce by expanding the constraint matrix using the projectionmethod [31] Contacting the toes with the ground can beregarded as constraining the toes on the ground (ie on the119909-axis) Thus the floor reaction force is expressed by includingthe constraint when 119910-coordinate of the toe is less than 0and the constraint force of the toes is greater than 0 (ie theforce is generated from the ground to the robot) Since thisconstraint can be described by the position constraint whichis the holonomic constraint the constraint matrix is definedas
C119901= [C119879119903119891
C119879119897119891
C119879119903119887
C119879119897119887]119879
C119894119895=
120597119905119894119895
120597x119901
(119905119894119895le 0 cap 120582
119891119894119895gt 0)
(28)
where 119905119894119895= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) and 120582
119891119894119895represents the
floor reaction force Also by utilizing the constraint matrix(24) is expanded as
Mx119901= h + [
CC119901
]
119879
[
120582
120582119901
] (29)
which can be projected to the tangent speed space usingthe orthogonal complement matrix D and then the motionequations including the contact on the floor are formulatedas
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901 (30)
Next the friction force shown in Figure 5 will be includedin the model Some linearnonlinear friction models havebeen already proposed in [32ndash35] In this study one of thesimplest friction models which is composed of only kineticand viscous frictions is applied because it has been assumedthat the coefficient of friction is uniformThe kinetic frictionforce is generated when the toe has a speed and the viscousfriction force is generated in proportion to the speed [25 26]of the toe Hence the friction model f is represented as
f = [f119879119903119891D119903119891
f119879119903119887D119903119887
f119879119897119891D119897119891
f119879119897119887D119897119887]119879
(31)
Kinetic friction
Kinetic friction
Friction
Friction
Viscous friction
fij
ij
Figure 5 The diagram of the included friction model 119891119894119895and V
119894119895
represent the friction force that generates the toe and the velocityof the toe respectively Blue line and green line represent thekinetic friction force and the viscous friction force respectivelyThe composition of these two friction forces represents the actualgenerated friction force 119891
119894119895
where
f119894119895=
[[[[[[
[
Z21times1
ℎ1198941198958
sin (1205791198941198958
minus 1205741198941198958) (120582119894119895120583119889sgn 1205791198941198958
+ 120583V1205791198941198958)
120582119894119895120583119889sgn 1198941198958
+ 120583V1198941198958
0
]]]]]]
]
(32)
with kinetic friction coefficient 120583119889 viscous friction coefficient
120583V and zero matrix Z119898times119899 Equation (31) is projected to thetangent speed space utilizing the orthogonal complementmatrix and then substituted into (30) Finally the motionequation of the quadruped robot with the Jansen linkagemechanisms considering the friction force is obtained
D119879MDq +D119879MDq = D119879h +D119879C119879119901120582119901+D119879F (33)
32 Collision with the Ground As an assumption the colli-sion between the ground and the toes is a non-completelyelastic collision Based on the projection method we assumethat an impulse is input at the moment when the collisionoccurs and the tangent speed after collision can be formu-lated from the one before collision [31 36]The tangent speedsbefore and after collision are defined as qminus and q+ respectivelyand their relationship can be expressed as
q+ = H (I minusMminus1C1015840119879 (C1015840Mminus1C1015840119879)minus1
C1015840)Dqminus (34)
where
H = [I4times4 Z4times16] (35)
Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 9
and C1015840 represents the constraint matrix after collision whichis defined as
C1015840 = [
CC119901
] (36)
4 Control System Design
So far we have the dynamic model taking into account thefloor reaction and friction forces However the coefficientof friction is unknown in general as it is difficult to use thedynamic model into the controller Therefore the controlleris designed by utilizing the approximate model based on theapproximation conditions [37]
41 Approximate Model Following two approximation con-ditions set based on characteristics of the model and mecha-nism we could have the approximate model
The first approximation condition is the contact withthe ground by two legs consistently The model is a two-dimensional model and the heights of the legs are not equalgenerally in different angles of the driving link in a complexlinkage mechanism such as the Jansen linkage mechanism inthis case [13 38] And it is not general to contact the groundby three legs Hence the condition of contacting the groundby two legs consistently can be approximated
The second approximation condition is that one leg doesnot slip Such state represents walking with the highestefficiency Referring to [10] we know that the Jansen linkagemechanism is able to walk with high efficiency in generalThus this condition can also be approximated
For the first approximation condition contactingwith theground by two legs can be regarded as constraining the toeson the ground (ie on the 119909-axis) For the second approx-imation condition one leg not slipping can be regarded asthe toe not having the speed in 119909 direction Since thesetwo constraints can be described as the position constraintsthey can be treated as the holonomic constraints The newconstraint matrix is defined as follows
C119886= [C119879119886119909
C1198791198861
C1198791198862]119879
C119886119909
=
120597 (1199091198941198958
+ ℎ1198941198958
cos (1205791198941198958
minus 1205741198941198958))
120597x119901
C1198861
=
120597119905119903119895
120597x119901
(119905119903119895le 119905119897119895)
C1198862
=
120597119905119897119895
120597x119901
(119905119897119895lt 119905119897119895)
(37)
where 119905119894119895
= 1199101198941198958
+ ℎ1198941198958
sin(1205791198941198958
minus 1205741198941198958) Using this constraint
matrix (24) is expanded as
Mx119901= h + [
CC119886
]
119879
[
120582
120582119886
] (38)
which can be projected to the tangent speed space by usingthe orthogonal complement matrix D Thus we have themotion equation including contact forces on the plane
D119879MDq +D119879MDq = D119879h +D119879C119879119886120582119886 (39)
42 Transformation of Dynamic Model Due to the presenceof Lagrangersquos multiplier 120582
119886 model (39) which represents the
constraint forces occurring on each constraint condition cannot be utilized directly to the controller To do that (39) needsto be transformed into a usable form for the controller
Firstly the constraint forces of the system are obtainedusing the projection method [39 40]
120582 = (CMminus1C119879)minus1
C (Dq minusMminus1h) (40)
Hence the constraint forces of the dynamic model (29) canbe represented as
[
120582
120582119886
] = (CMminus1C119879)minus1
C (Dq minusMminus1h) (41)
where
C = [
CC119886
] (42)
In the second step the generalized force matrix h isexpressed as the sum of three terms
h = E119906 + Fq + G119892 (43)
where 119906 is the input torque and
E =120597h120597119906
= D119879119904[E119879119892
E119879119903119891
E119879119903119887
E119879119897119891
E119879119897119887]119879
F =120597 (h minus E119906)
120597q= D119879119904(F1minus F2)
= D119879119904(diag (F
119894119895) minusM
119904diag (D
119894119895))D
G =120597 (h minus E119906 minus Fq)
120597119892
= D119879119904[G119879119892
G119879119903119891
G119879119903119887
G119879119897119891
G119879119897119887]119879
(44)
with the following components
D119904= diag (D
119892D119903119891D119903119887D119897119891D119897119887)
M119904= diag (M
119892M119903119891M119903119887M119897119891M119897119891)
E119894119895=
120597h119894119895
120597119906
F119894119895=
120597 (h119894119895minus E119894119895119906)
120597q119894119895
G119894119895=
120597 (h119894119895minus E119894119895119906 minus F119894119895q119894119895)
120597119892
(45)
10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Journal of Robotics
Substituting the above terms into (39) and (41) and furthersimplification generate the followingmodel for the controller
D119879MDq +D119879 (MD minus F minus 120572) q minusD119879 (G + 120574) 119892
= D119879 (E + 120573) 119906
(46)
where
120572 = C119879 (CMminus1C119879)minus1
C (D minusMminus1F)
120573 = minusC119879 (CMminus1C119879)minus1
CMminus1E
120574 = minusC119879 (CMminus1C119879)minus1
CMminus1G
(47)
43 Control System Based on Energy Control The controlsystem is designed based on the dynamic model and theenergy control which was proposed by Astrom et al as acontrol method focusing on the energy of the system [41ndash43] The energy-based control is better than state spacerepresentation for controlling complicatedmechanisms suchas the quadruped robot with Jansen linkage mechanismsin this case To realize the position control using energyapproach a potential field [44ndash47] is introduced As for thepotential field the target position is designed as the pointwhere the potential is the lowest Hence the process ofmotion control is the process that the energy of the robotis converging to the lowest potential namely the targetposition We define the potential field as
119864119901= 119896119901(119909120580minus 119909119903)2 (48)
where the current position of the robot is defined as 119909120580 119909119903
represents the target position and is defined as 119909119903= 0 119896
119901is
the gradient of the potential field The kinetic energy of thesystem is defined as
119864119896=1
2x119879119901M119904x119901 (49)
Combining (48) and (49) the total energy 119864 of the system is
119864 = 119864119896+ 119864119901 (50)
Then we design a Lyapunov function
119881 =1
2(119864 minus 119864
119903)2 (51)
where 119864119903is the target energy that is 119864
119903= 0 Solving the
differential of (51) we have
= 119864 = (119864119896+ 119864119901) (119896+ 119901) (52)
where
119901=
119889
119889119905119896119901(119909120580minus 119909119903)2= 2119896119901119909120580120580
= 2119896119901q119879 [0 119909120580 0 0]
119879
(53)
119896=
119889
119889119905
1
2x119879119901M119904x119901= x119879119901M119904x119901 (54)
Considering x119901= D119904Dq
119896= q119879D119879D119879
119904M119904(D119904Dq +D
119904Dq + D
119904Dq)
= q119879 (D119879MDq +D119879MDq +D119879F2q)
(55)
Transforming (46) into
D119879MDq +D119879MDq +D119879F2q
= D119879 (E + 120573) 119906 +D119879 (F1+ 120572) q +D119879 (G + 120574) 119892
(56)
and then substituting it into (55) yield
119896= q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892)
(57)
Substituting (53) and (57) into (52) the differential of theLyapunov function can be represented as
= (119864119896+ 119864119901) q119879 (D119879 (E + 120573) 119906 +D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]
119879)
(58)
To ensure the Lyapunov stability (namely to satisfy le 0)we choose the input torque as
119906 = minus (D119879 (E + 120573))dagger
(119896 (119864119896+ 119864119901) q +D119879 (G + 120574) 119892
+ 2119896119901[0 119909120580 0 0]
119879)
(59)
where dagger denotes the operator of pseudo inverse 119896 denotes thetuning parameter and satisfies 119896 gt 0
Finally substituting (59) into (58) we have
= (119864119896+ 119864119901) q119879 (minus119896 (119864
119896+ 119864119901) q minusD119879 (G + 120574) 119892
minus 2119896119901[0 119909120580 0 0]119879+D119879 (F
1+ 120572) q
+D119879 (G + 120574) 119892 + 2119896119901[0 119909120580 0 0]119879) = minus119896 (119864
119896
+ 119864119901)2
q119879q + (119864119896+ 119864119901) q119879D119879 (F
1+ 120572) q
(60)
where q119879D119879(F1+ 120572)q le 0 because q119879D119879(F
1+ 120572)q represents
the viscous friction forces According to (48) and (49) (119864119896+
119864119901) ge 0 Therefore
le 0 (61)
is proven by using (59) as the input torque In addition from(51) and (52) it is obvious that
119881 (0) = 0
(0) = 0
(62)
and an equilibrium point of the Lyapunov function is the caseof x119901
= 0 therefore the system is proven to be Lyapunovstable [48] Furthermore the system is asymptotically stableas long as q = 0 Therefore the position of the robot can beconverged to the target position by using the energy-basedcontrol strategy
Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 11
0
1
2
3
4
0 10 20 30 40 50 60 70 80Time (s)
x(m
)
(a)
012345
y(times001
m)
0 10 20 30 40 50 60 70 80Time (s)
(b)
012345
0 05 1 15 2 25 3 35minus05
x (m)
y(times001
m)
Left-foreLeft-back
Right-foreRight-back
(c)
Figure 6 Time evolutions of 119909-coordinate (a) and 119910-coordinate (b) of the robotrsquos toes and the trajectory of the feet (c)
0
30
60
90
Motor
Ang
le (r
ad)
0 10 20 30 40 50 60 70 80Time (s)
(a)
0
Ang
le (r
ad)
minus20
minus40
minus60
minus80
0 10 20 30 40 50 60 70 80Time (s)
Left-foreLeft-back
Right-foreRight-back
(b)
Figure 7 Time evolution of the angles of the driving gear 120579119898(a) and driven gears 120579
119894119895(b)
5 Numerical Simulations
Effectiveness of the designed position control systemutilizingthe approximate model is verified by numerical simulationswhich are performed byMaTXwith Visual C++ 2005 version5337 [49] The parameters used in simulations are thoseshown in Tables 1 and 4 The simulation time is 80 secondsand the sampling interval is 001 second The initial state ofthe robot is halted on the plane at position 119909
120580= 3m and the
Jansen link mechanism is with 120579119898
= minus1205874 rad In additionthe gradient of the potential field 119896
119901= 1 and the tuning
parameter 119896 = 03 The coefficient values of kinetic andviscous frictions are given as 120583
119889= 01 and 120583V = 01 The
numerical simulation results are shown as followsFrom Figures 6(a) and 6(b) it is confirmed that the robot
moves with toes slipping Figure 6(c) shows that the non-completely elastic collisions occur at the toes of the robot (ie
119905119894119895= 0) when the toes collide with the ground (ie 119905
119894119895= 0)
and height of the toes is greater than or equal to 0 In additionin case the toes depart from the ground the negative floorreaction force (ie the constraint force of 120582
119894119895lt 0) is not
generated because the position of the toe varies smoothlyTherefore the dynamic models given in Sections 2 and 3represent the dynamics of the robot shown in Figure 1 in two-dimensional surface including the contact and collision withthe ground Meanwhile the rotation angle of the driving gearis increasing from zero to 90∘ and those of the four drivengears are varying smoothly to minus80∘ sim minus90∘ approximately(Figure 7)
From Figures 8 and 9 it is confirmed that the positionof the robot can be converged to 119909 = 0 by the designedposition control system Meanwhile Figure 10 shows thatthe energy of the system converges to 0 In addition sincethe value of the Lyapunov function converges to 0 and its
12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Journal of Robotics
0 05 1 15 2 25 3x (m)
0
1
2
3
4
y(times01
m)
Figure 8 Trajectory of robotrsquos position
0 10 20 30 40 50 60 70 80Time (s)
0
1
2
3
x(m
)
Figure 9 Time evolution of 119909-coordinate of the robot
0
3
6
9
Ener
gy (J
)
KineticPotential
Total
0 10 20 30 40 50 60 70 80Time (s)
Figure 10 Time evolutions of the kinetic energy119864119896and the potential
energy 119864119901
differential is also less than 0 as shown in Figure 11 it isconfirmed that the input torque shown in Figure 12 satisfiesLyapunovrsquos stability theory Therefore the position of thequadruped robot with the Jansen linkage mechanism canbe controlled by applying the position control system basedon the energy control Figure 13 shows a sequence of thesnapshots of walking towards the target position based on theenergy-based position control in 80 seconds
6 Conclusion
This paper contributes to model and analyze the dynamics ofthe four-legged robots based on Theo Jansen linkage mech-anisms and driven by only one input using the projectionmethod The free-fall model of the whole system is builtthrough integrating the models of the Jansen linkages andthe corresponding gear system Based on that the reaction
012345
LyapunovDifferential
minus1minus2
Lyap
unov
(times10
)0 10 20 30 40 50 60 70 80
Time (s)
Figure 11 Time evolutions of the values of Lyapunovrsquos function 119881
and its differential
0
1
2
Torq
ue (N
m)
minus10 10 20 30 40 50 60 70 80
Time (s)
Figure 12 Time evolution of the input torque 119906
force and friction are taken into account to derive the plantmodel The energy control system utilizing the potentialfield is designed to realize the position control of the Jansenwalking robot Based on the Lyapunov stability theory thiscontroller is proven to be able to converge by choosingappropriate input and its effectiveness is verified throughnumerical simulations This research sets a theoretical basisfor further investigation optimization or extension of leggedsystems based onTheo Jansen linkage mechanisms
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 13
26
27
28
29 3
31
32
33
34
minus01
0
01
02
03
04
05y
(m)
0 s
21
22
23
24
25
26
27
28
29
minus01
0
01
02
03
04
05
y(m
)
15
16
17
18
19
20
21
22
23
24
minus01
0
01
02
03
04
05
y(m
)
1
11
12
13
14
15
16
17
19
18
minus01
0
01
02
03
04
05
y(m
)
06
05
07
08
09 1
11
12
13
14
minus01
0
01
02
03
04
05
y(m
)
02
01
03
04
minus01
0
01
02
03
04
05
y(m
)
06
05
04
03
02
010
07
minus01
minus01
minus02
04
03
02
010
minus01
minus02
minus03
minus04
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
y(m
)
minus01
0
01
02
03
04
05
x (m) x (m) x (m)
x (m) x (m) x (m)
x (m) x (m) x (m)
y(m
)
10 s 20 s
30 s 40 s 50 s
60 s 70 s 80 s
06
05
07
08
09 1
04
03
02
010
minus01
minus02
minus03
minus04
Figure 13 The snapshots of walking towards the target position based on the energy-based position control
Acknowledgment
This work was fully supported by the SUTD-MIT Interna-tional Design Centre Singapore under Grants IDG31200110and IDD41200105
References
[1] H Kazemi V J Majd and M M Moghaddam ldquoModeling androbust backstepping control of an underactuated quadrupedrobot in boundingmotionrdquo Robotica vol 31 no 3 pp 423ndash4392013
[2] M F Silva and J A T MacHado ldquoKinematic and dynamicperformance analysis of artificial legged systemsrdquo Robotica vol26 no 1 pp 19ndash39 2008
[3] C A Acosta-Calderon R E Mohan C Zhou L Hu P KYue and H Hu ldquoA modular architecture for humanoid soccerrobots with distributed behavior controlrdquo International Journalof Humanoid Robotics vol 5 no 3 pp 397ndash416 2008
[4] S Bartsch T Birnschein M Rommermann J Hilljegerdes DKuhn and F Kirchner ldquoDevelopment of the six-legged walkingand climbing robot SpaceClimberrdquo Journal of Field Robotics vol29 no 3 pp 506ndash532 2012
[5] J Estremera J A Cobano and P G de Santos ldquoContinuousfree-crab gaits for hexapod robots on a natural terrain with
forbidden zones an application to humanitarian deminingrdquoRobotics and Autonomous Systems vol 58 no 5 pp 700ndash7112010
[6] F L Moro A Sprowitz A Tuleu et al ldquoHorse-like walkingtrotting and galloping derived from kinematic Motion Prim-itives (kMPs) and their application to walktrot transitions in acompliant quadruped robotrdquo Biological Cybernetics vol 107 no3 pp 309ndash320 2013
[7] D Sanz-Merodio E Garcia and P Gonzalez-de-Santos ldquoAna-lyzing energy-efficient configurations in hexapod robots fordemining applicationsrdquo Industrial Robot vol 39 no 4 pp 357ndash364 2012
[8] P G de Santos E Garcia R Ponticelli and M Armada ldquoMin-imizing energy consumption in hexapod robotsrdquo AdvancedRobotics vol 23 no 6 pp 681ndash704 2009
[9] S S Roy and D K Pratihar ldquoDynamic modeling stability andenergy consumption analysis of a realistic six-legged walkingrobotrdquo Robotics and Computer-Integrated Manufacturing vol29 no 2 pp 400ndash416 2013
[10] T JansenThe Great Pretender Nai010 Publishers 2007[11] K Komoda and H Wagatsuma ldquoA proposal of the extended
mechanism for theo jansen linkage to modify the walkingelliptic orbit and a study of cyclic base functionrdquo in Proceedingsof the 7th Annual DynamicWalking Conference (DWC rsquo12) May2012
14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

14 Journal of Robotics
[12] F Moldovan and V Dolga ldquoAnalysis of Jansen walking mecha-nism using CADrdquo Solid State Phenomena vol 166-167 pp 297ndash302 2010
[13] A J Ingram A new type of walking machine [PhD thesis]University of Johannesburg 2006
[14] D Giesbrecht and C Q Wu ldquoDynamics of legged walkingmechanism lsquowind beastrsquordquo in Proceedings of the DynamicWalkingConference 2009
[15] W Khalil and S Guegan ldquoInverse and direct dynamicmodelingof Gough-Stewart robotsrdquo IEEE Transactions on Robotics andAutomation vol 20 no 4 pp 754ndash762 2004
[16] X Wang and J K Mills ldquoDynamic modeling of a flexible-link planar parallel platform using a substructuring approachrdquoMechanism and Machine Theory vol 41 no 6 pp 671ndash6872006
[17] S S Mahil ldquoOn the application of Lagrangersquos method to thedescription of dyanmic systemrdquo IEEE Transactions on SystemsMan and Cybernetics vol 12 no 6 pp 877ndash889 1982
[18] K Arczewski and W Blajer ldquoA unified approach to the mod-elling of holonomic and nonholonomic mechanical systemsrdquoMathematical Modelling of Systems vol 2 no 3 pp 157ndash1741996
[19] W Blajer ldquoA geometrical interpretation and uniform matrixformulation of multibody system dynamicsrdquo Zeitschrift furAngewandte Mathematik und Mechanik vol 81 no 4 pp 247ndash259 2001
[20] H Ohsaki M Iwase and S Hatakeyama ldquoA consideration ofnonlinear system modeling using the projection methodrdquo inProceedings of the Society of Instrument and Control EngineersAnnual Conference (SICE rsquo07) pp 1915ndash1920 September 2007
[21] D Studer ldquoMy four legs walking machinerdquo httpwwwarmurechWALKINGhtm
[22] H Ohsaki M Iwase T Sadahiro and S Hatakeyama ldquoAconsideration of human-unicycle model for unicycle operationanalysis based on moment balancing pointrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo09) pp 2468ndash2473 October 2009
[23] Y Itoh K Higashi and M Iwase ldquoUKF-based estimation ofindicated torque for IC engines utilizing nonlinear two-inertiamodelrdquo in Proceedings of the 51st IEEE Conference on Decisionand Control (CDC rsquo12) pp 4077ndash4082 December 2012
[24] S Nansai N Rojas M R Elara and R Sosa ldquoExplorationof adaptive gait patterns with a reconfigurable linkage mecha-nismrdquo in Proceedings of the 26th IEEERSJ International Confer-ence on Intelligent Robots and Systems (IROS rsquo13) pp 4661ndash4668November 2013
[25] C Canudas de Wit H Olsson K J Astrom and P LischinskyldquoA new model for control of systems with frictionrdquo IEEETransactions on Automatic Control vol 40 no 3 pp 419ndash4251995
[26] I Virgala and M Kelemen ldquoExperimental friction identifica-tion of a DC motorrdquo International Journal of Mechanics andApplications vol 3 no 1 pp 26ndash30 2013
[27] D Mundo G Gatti and D B Dooner ldquoOptimized five-barlinkages with non-circular gears for exact path generationrdquoMechanism and Machine Theory vol 44 no 4 pp 751ndash7602009
[28] E Ottaviano D Mundo G A Danieli and M CeccarellildquoNumerical and experimental analysis of non-circular gears andcam-follower systems as function generatorsrdquo Mechanism andMachine Theory vol 43 no 8 pp 996ndash1008 2008
[29] D Mundo ldquoGeometric design of a planetary gear train withnon-circular gearsrdquoMechanism andMachineTheory vol 41 no4 pp 456ndash472 2006
[30] S Nansai M R Elara and M Iwase ldquoDynamic analysis andmodeling of Jansen mechanismrdquo Procedia Engineering vol 64pp 1562ndash1571 2013
[31] H Ohta M Yamakita and K Furuta ldquoFrom passive toactive dynamic walkingrdquo International Journal of Robust andNonlinear Control vol 11 no 3 pp 287ndash303 2001
[32] C Canudas de Wit and P Lischinsky ldquoAdaptive frictioncompensation with partially known dynamic friction modelrdquoInternational Journal of Adaptive Control and Signal Processingvol 11 no 1 pp 65ndash80 1997
[33] J Swevers F Al-Bender C G Ganseman and T Prajogo ldquoAnintegrated friction model structure with improved preslidingbehavior for accurate friction compensationrdquo IEEE Transac-tions on Automatic Control vol 45 no 4 pp 675ndash686 2000
[34] H Olsson K J Astrom C C de Wit M Gafvert andP Lischinsky ldquoFriction models and friction compensationrdquoEuropean Journal of Control vol 4 no 3 pp 176ndash195 1998
[35] V Lampaert J Swevers and F Al-Bender ldquoModification of theLeuven integrated friction model structurerdquo IEEE Transactionson Automatic Control vol 47 no 4 pp 683ndash687 2002
[36] A Ohata A Sugiki Y Ohta S Suzuki and K Furuta ldquoEnginemodeling based on projection method and conservation lawsrdquoin Proceedings of the IEEE International Conference on ControlApplications vol 2 pp 1420ndash1424 IEEE September 2004
[37] S Nansai M Iwase and M R Elara ldquoEnergy based positioncontrol of jansen walking robotrdquo in Proceedings of the IEEEInternational Conference on Systems Man and Cybernetics pp1241ndash1246 October 2013
[38] F Moldovan V Dolga and C Pop ldquoKinetostatic analysis ofan articulated walking mechanismrdquo Mechanisms and MachineScience vol 3 pp 103ndash110 2012
[39] K Watanabe M Iwase S Hatakeyama and T MaruyamaldquoControl strategy for a snake-like robot based on constraintforce and verification by experimentrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots andSystems (IROS rsquo08) pp 1618ndash1623 September 2008
[40] K Furuta ldquoSuper mechano-systems fusion of control andmechanismrdquo in Proceedings of the 15th TriennialWorld Congressof IFAC vol 15 p 1635 Barcelona Spain July 2002
[41] K J Astrom andK Furuta ldquoSwinging up a pendulumby energycontrolrdquo Automatica vol 36 no 2 pp 287ndash295 2000
[42] K J Astrom J Aracil and F Gordillo ldquoA family of smoothcontrollers for swinging up a pendulumrdquo Automatica vol 44no 7 pp 1841ndash1848 2008
[43] J Aracil F Gordillo and K J Astrom ldquoA new family ofpumping-dumping smooth strategies for swinging up a pendu-lumrdquo in Proceedings of the 16th IFACWorld Congress July 2005
[44] Y K Hwang and N Ahuja ldquoA potential field approach to pathplanningrdquo IEEE Transactions on Robotics and Automation vol8 no 1 pp 23ndash32 1992
[45] E Rimon and D E Koditschek ldquoExact robot navigation usingartificial potential functionsrdquo IEEETransactions onRobotics andAutomation vol 8 no 5 pp 501ndash518 1992
[46] J Barraquand B Langlois and J C Latombe ldquoNumericalpotential field techniques for robot path planningrdquo IEEE Trans-actions on SystemsMan and Cybernetics vol 22 no 2 pp 224ndash241 1992
Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Robotics 15
[47] Y Koren and J Borenstein ldquoPotential field methods and theirinherent limitations formobile robot navigationrdquo inProceedingsof the IEEE International Conference on Robotics and Automa-tion pp 1398ndash1404 April 1991
[48] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press 1994
[49] M Koga ldquoMaTXRtMaTX a freeware for integrated CACSDrdquoin Proceedings of the IEEE International Symposium on Com-puter Aided Control System Design pp 451ndash456 Kohala CoastHawaii USA August 1999
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of