PHYS 20 LESSONS Unit 2: 2-D Kinematics Projectiles Lesson 5: 2-D Projectiles.

Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2013 Article ID 486020 7 pageshttpdxdoiorg1011552013486020
Research ArticleA New Method for Initial Parameters Optimization ofGuided Projectiles
Feng Bi-Ming and Nie Wan-Sheng
The Academy of Equipment Beijing 101416 China
Correspondence should be addressed to Feng Bi-Ming fengbimingyahoocomcn
Received 31 March 2013 Accepted 4 November 2013
Academic Editor R Ganguli
Copyright copy 2013 F Bi-Ming and N Wan-Sheng This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
A new algorithm was developed for the initial parameters optimization of guided projectiles with multiple constraints Due to therelationship between the analytic guidance logic and state variables of guided projectiles the Radau pseudospectral method wasused to discretize the differential equations including control variables and state variables with multiple constraints into seriesalgebraic equations that were expressed only by state variables The initial parameter optimization problem was transformedto a nonlinear programming problem and the sequential quadratic programming algorithm was used to obtain the optimalcombinations of initial height and range to target for the final velocity of guided projectiles maximumwith constraints Comparingwith the appropriate initial conditions solved by Monte Carlo method and the flight characteristics solved by integrating theoriginal differential equations in the optimal initial parameters computed by the new algorithm the feasibility of new algorithmwas validated
1 Introduction
The initial parameter optimization problem of guided projec-tileswithmultiple constraints is considered In addition to theconstraints on its terminal position coordinates the projectilemust also impact the target from a specified direction withthe required circular error probable (CEP) andmake sure theimpact velocity maximum
Presently several studies are conducted for developingthe guidance logic withmultiple constraints [1 2] and search-ing the launch acceptable region (LAR) of a guided bombwhile the initial conditions are known [3 4] However a fewstudies pay attention to the initial parameters optimizationfor the guided projectiles with multiple constraints Theappropriate parameters are calculated based on differentcombinations of initial conditions (height above sea levelvelocity and path angles) by searchingmethod to find out thelargest LAR but they are not optimal conditions [5] theindirectmethod and directmethod both are called calculativemethod which transforms the parameters optimization tothe optimal control problem Indirect method based onthe Pontryagin maximum principle works out the analytical
optimal control logic to obtain the optimal index for theguided projectiles in known initial conditions for instancemaximum impact velocity or least energy [6 7] directmethod based on pseudospectral method discretizes theequations of motion to obtain the numerical optimal controllaw for making parameters optimal with constraints [8 9]Now when the analytical guidance logic exists how to findout the optimal initial parameters of the guided projectileswithmultiple constraints tomake the final velocitymaximumbecomes a new problem
Due to the relationship between the analytical guidancelogic and state variables the 2-dimensional equations ofmotion with both control variables and state variables aredescribed by the differential equations only with the statevariables Then the new differential equations are discretizedto be series algebraic equations expressed by state variableswhile the pseudospectral method is used [10] So the ini-tial parameters optimization is transformed to a nonlinearprogramming problem which can be solved using a sequen-tial quadratic programming (SQP) algorithm to improvecomputation efficiency and reduce the complexity of initialcondition searching
2 International Journal of Aerospace Engineering
X
Y
V0
120582D
120574D
M
x0
y0
Otarget
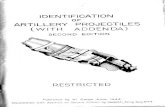
Figure 1 Coordinate system and geometry
2 Theoretical Development
21 Guidance Logic with Impact Direction Constraint inLongitudinal Plane For development purposes a simplifiedflat earth coordinate system is defined to be shown in Figure 1The target is at the origin of the coordinate system We willfocus on a fixed target in the following discussion The 119909-axis is pointed to the projectile and the 119910-axis is vertical tothe horizontal plane The line-of-sight (LOS) from the originto the projectile is defined by the elevation angle 120582
119863 where
0 le 120582119863le 1205872 is measured from positive 119909-axis in a clockwise
direction The flight path angle 120579 is the angle between therelative velocity vector and the local horizontal plane andminus1205872 le 120579 le 0 is measured from local horizon in a clockwisedirection as defined in Figure 1 120574
119863(minus1205872 le 120574
119863le 0) is the
azimuth angle of relative velocity vector in vertical plane asdefined in Figure 1
By the definition of the coordinate system shown inFigure 1 the standard 2D equations of motion of the projec-tile in the longitudinal plane can be described as follows
=
minus1205881198812119878119862119909 (120572)
2119872
+ 119892119909ℎ
120579 =
1
119881
(
1205881198812119878119862119910 (120572)
2119872
+ 119892119910ℎ)
= minus119881 cos 120579
119910 = 119881 sin 120579
(1)
As described in (1) the position coordinates are 119909 and 119910The earth-relative velocity is 119881 the mass of projectile is119872the atmospheric density model is 120588 = 120588
0sdot 119890(minus119910119867) the angle of
attack is 120572 and 119892119909ℎ
and 119892119910ℎ
can be defined as follows
119892119909ℎ= minus119892ℎsin 120579 119892
119910ℎ= minus119892ℎcos 120579 (2)
The additional parameters are defined as follows
119892ℎ= 981ms2 gravity acceleration
1205880= 1226 kgm3 standard sea-level density
119867 = 725424m atmospheric scale height
119878 = 0102m2 aerodynamic reference area
In this vertical plane the guidance logic of the projectilewith impact direction constraint may be represented by [6]
120574119863=
119870119866119863120582119863+ 119870119871119863(120582119863+ 120574119863119865)
119879119892
(3)
Here 120574119863119865
is defined as the desired impact direction
22 Differential Equations Expressed by State VariablesBefore the parameter optimization the equations of motionwith control variable are transformed to the differentialequations only including state variables By the discretizationof new differential equations the equation of motion canbe described by some algebraic equations So the initialparameter optimization can be transformed to the nonlinearprogramming problem
As shown in Figure 1 the 120582119863is also easily obtained
120582119863= arctan(
119910
119909
) (4)
So the derivative of 120582119863can be described as
120582119863=
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
119879119892=
radic1199092+ 1199102
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
(5)
Using (5) the guidance logic equation (3) can be repre-sented as follows
120574119863= 119870119866119863
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
+ 119870119871119863(120582119863+ 120574119863119865)
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
radic1199092+ 1199102
(6)
While the equation 120579 = 120574119863satisfies in the vertical plane
the lift coefficient 119862119910(120572) yields from (1)
119862119910 (120572) =
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
(7)
The aerodynamic coefficients 119862120572119910 1198620
119909 and 119862120572
119909come from
[11] and the lift coefficient can be defined as 119862119910(120572) = 119862
120572
119910120572 so
the 120572 is obtained
120572 =
119862119910 (120572)
119862120572
119910
=
1
119862120572
119910
sdot
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
(8)
International Journal of Aerospace Engineering 3
Because the drag coefficient is defined as 119862119909(120572) = 119862
0
119909+
119862120572
1199091205722 the drag force119863 can be readily achieved
119863 =
1205880sdot 119890(minus119910119867)
1198812119878
2
1198620
119909+ 119862120572
119909[
119862119910 (120572)
119862120572
119910
]
2
(9)
By (9) and (6) (1) with control variable 120572 can be trans-formed to differential equations expressed by state variables[119909 119910 119881 120579] it is described as follows
119889119881
119889119905
= minus
1205880sdot 119890(minus119910119867)
1198812119878
2119872
1198620
119909+ 119862120572
119909[
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
119862120572
1199101205880sdot 119890(minus119910119867)
1198812119878
]
2
+ 119892119909ℎ
119889120579
119889119905
= 119870119866119863
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
+119870119871119863(120582119863+ 120574119863119865)
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
radic1199092+ 1199102
119889119909
119889119905
= minus119881 cos 120579
119889119910
119889119905
= 119881 sin 120579(10)
If the initial state x0is known the only final state x
119891is
readily obtained by integrating (10) So the initial parameteroptimization problem can be described as follows
Cost function
min 120593 (x0 x119891) (11)
Subject to
the dynamic constraints
x = f (x) (12)
the inequality constraints
|120572| =
10038161003816100381610038161003816100381610038161003816100381610038161003816
1
119862120572
119910
sdot
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
10038161003816100381610038161003816100381610038161003816100381610038161003816
le 120572LIMIT
10038161003816100381610038161003816119899119910
10038161003816100381610038161003816=
10038161003816100381610038161003816120574119863119881 minus 119892
119910ℎ
10038161003816100381610038161003816
119892ℎ
le 119899119910 LIMIT
10038161003816100381610038161003816119909119891
10038161003816100381610038161003816le CEP 119909
0gt 0 119910
0gt 0 119881
119891gt 0
(13)
the boundary conditions
1205790= 120579initial 119881
0= 119881initial 119910
119891= 119910terminal
120579119891= 120574119863119865
(14)
23 Discretization of Differential Equations For instance thecontinuous differential equations are discretized into thealgebraic equations by the Radau pseudospectral methodThe parameter optimization problem is described as follows
Cost functional
min 119869 asymp Φ (X(1)1 1199050X(119870)119873119870+1
119905119870) (15)
Equation constraint
equation of motion
119873119896+1
sum
119895=1
119863(119896)
119894119895X(119896)119895minus
119905119896minus 119905119896minus1
2
f (X(119896)119894 120591(119896)
119894 119905119896minus1 119905119896) = 0
(119894 = 1 119873119896)
(16)
equation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) = 0 (17)
Inequation constraint
angle of attack and overloading constraint
C(119896) (X(119896)119894 120591119894 119905119896minus1 119905119896) le 0 (119894 = 1 119873
119896) (18)
inequation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) le 0 (19)
Then the initial parameter optimization problem of theequations of motion that satisfied the guidance logic is trans-formed to the nonlinear programming problem of algebraicequations expressed by state variables The optimal initialparameter can be computed by SQP
3 Results and Discussions
Assuming that the initial path angle and velocity exist theoptimal initial height and range to the target are solved to getthe maximum impact velocityThe problem can be describedas follows
Cost function
min minus119881119891 (20)
Subject to
the dynamic constraints
x = f (x) (21)
the inequality constraints
[
[
[
[
[
[
minus30∘
minus60
0
0
minus10m
]
]
]
]
]
]
le
[
[
[
[
[
[
120572
119899119910
1199100
1199090
119909119891
]
]
]
]
]
]
le
[
[
[
[
[
[
30∘
60
20 km50 km10m
]
]
]
]
]
]
(22)
4 International Journal of Aerospace Engineering
5 10 15 20 25 301100120013001400150016001700180019002000
Impa
ct v
eloc
ity (m
s)
Initial velocity 3200 ms
Initial height 1366 kmInitial height 1466 kmInitial height 1266 km
Range to target (km)
(a) Distribution for initial velocity 3200ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
Impa
ct v
eloc
ity (m
s)
Initial height 138 kmInitial height 128 kmInitial height 148 km
Initial velocity 3400 ms
Range to target (km)
(b) Distribution for initial velocity 3400ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
2200
Impa
ct v
eloc
ity (m
s)
Initial height 1528 kmInitial height 1428 kmInitial height 1628 km
Initial velocity 3600 ms
Range to target (km)
(c) Distribution for initial velocity 3600ms
5 10 15 20 25 301400150016001700180019002000210022002300
Impa
ct v
eloc
ity (m
s)
Initial height 1676 kmInitial height 1576 kmInitial height 1776 km
Initial velocity 3800 ms
Range to target (km)
(d) Distribution for initial velocity 3800ms
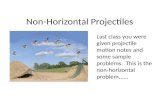
Figure 2 Distribution of the impact velocity and range to target computed by Monte Carlo method
the boundary conditions
[
[
[
[
1205790
1198810
119910119891
120579119891
]
]
]
]
=
[
[
[
[
minus15∘
119881initial0
minus90∘
]
]
]
]
(23)
Suppose that the mass of guided projectile is 450 kg theoptimal parameters for maximum final velocity in differentinitial velocities are shown in Table 1 With the increase ofinitial velocity the optimal initial height becomes higher theoptimal range to target becomes farther and the maximumimpact velocity becomes faster Comparing with the resultsas shown in Figure 2 the optimal heights and ranges to targetfor maximum impact velocities in different initial velocitiesare almost similar to the results computed by Monte Carlomethod
For instance when the initial velocity and path angleare respectively 3400ms and minus15∘ the optimal height andrange to target are respectively 138 km and 1148 km (shown
Table 1 The optimal initial position in different velocities formaximum impact velocity
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3200 1266 1058 1945minus15 3400 1380 1148 2045minus15 3600 1528 1319 2134minus15 3800 1676 1469 2205
in Table 1) and the maximum terminal velocity is 2045msCompared to the results shown in Figure 2(b) the resultsfind that while the initial height becomes higher or lowerthan 138 km the maximum final velocity becomes slowerAs shown in Figure 2(b) when the initial height is 138 kmthe range to target for the maximum final velocity is close to115 km and the impact velocity is close to 2050ms
Using the initial parameters as shown in Table 1 theequation of motion (1) with guidance logic (3) is integratedto get the flight characteristics of projectile in different initial
International Journal of Aerospace Engineering 5
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
18
16
14
12
10
8
6
4
2
0
Hei
ght (
km)
0 25 5 75 10 125 15Range to target (km)
(a) Comparison of height and range to target
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
0 1 2 3 4 5 6 7 8 9minus90
minus60
minus30
0
Time (s)
120579(d
eg)
4000
3000
2000
1000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9Time (s)
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9minus70minus60minus50minus40minus30minus20minus10
0102030
Time (s)
ny
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
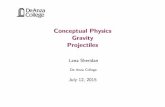
Figure 3 Comparison of flight characteristics of projectile in different initial condition
velocities Analyzing the results shown in Figure 3(a) toFigure 3(d) the result finds that the trajectories of projectilefor maximum impact velocity are close to the parabolasand the final impact direction AOA and overloading satisfythe constraints So the feasibility of new initial parameteroptimization method used in this work is validated bycomparison to the results shown in Figures 2 and 3 The newmethod can obtain the optimal initial parameters of guidedprojectile for different cost functions with the multipleconstraints
As shown in Figure 3(d) the maximum overloadingof projectile is saturated for long time during flight indifferent initial conditions it goes against the adaptability ofprojectile to the error and disturbance In fact the maximumoverloading should be smaller than the limit With theconstraint 119899
119910lt 60 the optimal initial parameters for
maximum impact velocity are solved by the new method asshown in Table 2
Table 2 Optimal initial position with more severe constraint
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3400 15781 14098 2021minus15 3600 16562 14149 2114minus15 3800 18232 16094 2175
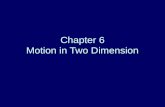
Contrasting the results shown in Table 1 in the sameinitial velocities the initial heights are higher and the rangesto target are farther but the maximum final velocities withconstraint 119899
119910lt 60 are slower than the results with constraint
119899119910le 60The comparison of flight characteristics in different initial
conditions set out in Table 2 is shown in Figure 4 The max-imum overloading in different initial conditions as shownin Figure 4(d) is smaller than 60 it is propitious to theadaptability of projectile to the error and disturbance
6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
X
Y
V0
120582D
120574D
M
x0
y0
Otarget
Figure 1 Coordinate system and geometry
2 Theoretical Development
21 Guidance Logic with Impact Direction Constraint inLongitudinal Plane For development purposes a simplifiedflat earth coordinate system is defined to be shown in Figure 1The target is at the origin of the coordinate system We willfocus on a fixed target in the following discussion The 119909-axis is pointed to the projectile and the 119910-axis is vertical tothe horizontal plane The line-of-sight (LOS) from the originto the projectile is defined by the elevation angle 120582
119863 where
0 le 120582119863le 1205872 is measured from positive 119909-axis in a clockwise
direction The flight path angle 120579 is the angle between therelative velocity vector and the local horizontal plane andminus1205872 le 120579 le 0 is measured from local horizon in a clockwisedirection as defined in Figure 1 120574
119863(minus1205872 le 120574
119863le 0) is the
azimuth angle of relative velocity vector in vertical plane asdefined in Figure 1
By the definition of the coordinate system shown inFigure 1 the standard 2D equations of motion of the projec-tile in the longitudinal plane can be described as follows
=
minus1205881198812119878119862119909 (120572)
2119872
+ 119892119909ℎ
120579 =
1
119881
(
1205881198812119878119862119910 (120572)
2119872
+ 119892119910ℎ)
= minus119881 cos 120579
119910 = 119881 sin 120579
(1)
As described in (1) the position coordinates are 119909 and 119910The earth-relative velocity is 119881 the mass of projectile is119872the atmospheric density model is 120588 = 120588
0sdot 119890(minus119910119867) the angle of
attack is 120572 and 119892119909ℎ
and 119892119910ℎ
can be defined as follows
119892119909ℎ= minus119892ℎsin 120579 119892
119910ℎ= minus119892ℎcos 120579 (2)
The additional parameters are defined as follows
119892ℎ= 981ms2 gravity acceleration
1205880= 1226 kgm3 standard sea-level density
119867 = 725424m atmospheric scale height
119878 = 0102m2 aerodynamic reference area
In this vertical plane the guidance logic of the projectilewith impact direction constraint may be represented by [6]
120574119863=
119870119866119863120582119863+ 119870119871119863(120582119863+ 120574119863119865)
119879119892
(3)
Here 120574119863119865
is defined as the desired impact direction
22 Differential Equations Expressed by State VariablesBefore the parameter optimization the equations of motionwith control variable are transformed to the differentialequations only including state variables By the discretizationof new differential equations the equation of motion canbe described by some algebraic equations So the initialparameter optimization can be transformed to the nonlinearprogramming problem
As shown in Figure 1 the 120582119863is also easily obtained
120582119863= arctan(
119910
119909
) (4)
So the derivative of 120582119863can be described as
120582119863=
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
119879119892=
radic1199092+ 1199102
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
(5)
Using (5) the guidance logic equation (3) can be repre-sented as follows
120574119863= 119870119866119863
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
+ 119870119871119863(120582119863+ 120574119863119865)
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
radic1199092+ 1199102
(6)
While the equation 120579 = 120574119863satisfies in the vertical plane
the lift coefficient 119862119910(120572) yields from (1)
119862119910 (120572) =
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
(7)
The aerodynamic coefficients 119862120572119910 1198620
119909 and 119862120572
119909come from
[11] and the lift coefficient can be defined as 119862119910(120572) = 119862
120572
119910120572 so
the 120572 is obtained
120572 =
119862119910 (120572)
119862120572
119910
=
1
119862120572
119910
sdot
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
(8)
International Journal of Aerospace Engineering 3
Because the drag coefficient is defined as 119862119909(120572) = 119862
0
119909+
119862120572
1199091205722 the drag force119863 can be readily achieved
119863 =
1205880sdot 119890(minus119910119867)
1198812119878
2
1198620
119909+ 119862120572
119909[
119862119910 (120572)
119862120572
119910
]
2
(9)
By (9) and (6) (1) with control variable 120572 can be trans-formed to differential equations expressed by state variables[119909 119910 119881 120579] it is described as follows
119889119881
119889119905
= minus
1205880sdot 119890(minus119910119867)
1198812119878
2119872
1198620
119909+ 119862120572
119909[
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
119862120572
1199101205880sdot 119890(minus119910119867)
1198812119878
]
2
+ 119892119909ℎ
119889120579
119889119905
= 119870119866119863
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
+119870119871119863(120582119863+ 120574119863119865)
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
radic1199092+ 1199102
119889119909
119889119905
= minus119881 cos 120579
119889119910
119889119905
= 119881 sin 120579(10)
If the initial state x0is known the only final state x
119891is
readily obtained by integrating (10) So the initial parameteroptimization problem can be described as follows
Cost function
min 120593 (x0 x119891) (11)
Subject to
the dynamic constraints
x = f (x) (12)
the inequality constraints
|120572| =
10038161003816100381610038161003816100381610038161003816100381610038161003816
1
119862120572
119910
sdot
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
10038161003816100381610038161003816100381610038161003816100381610038161003816
le 120572LIMIT
10038161003816100381610038161003816119899119910
10038161003816100381610038161003816=
10038161003816100381610038161003816120574119863119881 minus 119892
119910ℎ
10038161003816100381610038161003816
119892ℎ
le 119899119910 LIMIT
10038161003816100381610038161003816119909119891
10038161003816100381610038161003816le CEP 119909
0gt 0 119910
0gt 0 119881
119891gt 0
(13)
the boundary conditions
1205790= 120579initial 119881
0= 119881initial 119910
119891= 119910terminal
120579119891= 120574119863119865
(14)
23 Discretization of Differential Equations For instance thecontinuous differential equations are discretized into thealgebraic equations by the Radau pseudospectral methodThe parameter optimization problem is described as follows
Cost functional
min 119869 asymp Φ (X(1)1 1199050X(119870)119873119870+1
119905119870) (15)
Equation constraint
equation of motion
119873119896+1
sum
119895=1
119863(119896)
119894119895X(119896)119895minus
119905119896minus 119905119896minus1
2
f (X(119896)119894 120591(119896)
119894 119905119896minus1 119905119896) = 0
(119894 = 1 119873119896)
(16)
equation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) = 0 (17)
Inequation constraint
angle of attack and overloading constraint
C(119896) (X(119896)119894 120591119894 119905119896minus1 119905119896) le 0 (119894 = 1 119873
119896) (18)
inequation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) le 0 (19)
Then the initial parameter optimization problem of theequations of motion that satisfied the guidance logic is trans-formed to the nonlinear programming problem of algebraicequations expressed by state variables The optimal initialparameter can be computed by SQP
3 Results and Discussions
Assuming that the initial path angle and velocity exist theoptimal initial height and range to the target are solved to getthe maximum impact velocityThe problem can be describedas follows
Cost function
min minus119881119891 (20)
Subject to
the dynamic constraints
x = f (x) (21)
the inequality constraints
[
[
[
[
[
[
minus30∘
minus60
0
0
minus10m
]
]
]
]
]
]
le
[
[
[
[
[
[
120572
119899119910
1199100
1199090
119909119891
]
]
]
]
]
]
le
[
[
[
[
[
[
30∘
60
20 km50 km10m
]
]
]
]
]
]
(22)
4 International Journal of Aerospace Engineering
5 10 15 20 25 301100120013001400150016001700180019002000
Impa
ct v
eloc
ity (m
s)
Initial velocity 3200 ms
Initial height 1366 kmInitial height 1466 kmInitial height 1266 km
Range to target (km)
(a) Distribution for initial velocity 3200ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
Impa
ct v
eloc
ity (m
s)
Initial height 138 kmInitial height 128 kmInitial height 148 km
Initial velocity 3400 ms
Range to target (km)
(b) Distribution for initial velocity 3400ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
2200
Impa
ct v
eloc
ity (m
s)
Initial height 1528 kmInitial height 1428 kmInitial height 1628 km
Initial velocity 3600 ms
Range to target (km)
(c) Distribution for initial velocity 3600ms
5 10 15 20 25 301400150016001700180019002000210022002300
Impa
ct v
eloc
ity (m
s)
Initial height 1676 kmInitial height 1576 kmInitial height 1776 km
Initial velocity 3800 ms
Range to target (km)
(d) Distribution for initial velocity 3800ms
Figure 2 Distribution of the impact velocity and range to target computed by Monte Carlo method
the boundary conditions
[
[
[
[
1205790
1198810
119910119891
120579119891
]
]
]
]
=
[
[
[
[
minus15∘
119881initial0
minus90∘
]
]
]
]
(23)
Suppose that the mass of guided projectile is 450 kg theoptimal parameters for maximum final velocity in differentinitial velocities are shown in Table 1 With the increase ofinitial velocity the optimal initial height becomes higher theoptimal range to target becomes farther and the maximumimpact velocity becomes faster Comparing with the resultsas shown in Figure 2 the optimal heights and ranges to targetfor maximum impact velocities in different initial velocitiesare almost similar to the results computed by Monte Carlomethod
For instance when the initial velocity and path angleare respectively 3400ms and minus15∘ the optimal height andrange to target are respectively 138 km and 1148 km (shown
Table 1 The optimal initial position in different velocities formaximum impact velocity
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3200 1266 1058 1945minus15 3400 1380 1148 2045minus15 3600 1528 1319 2134minus15 3800 1676 1469 2205
in Table 1) and the maximum terminal velocity is 2045msCompared to the results shown in Figure 2(b) the resultsfind that while the initial height becomes higher or lowerthan 138 km the maximum final velocity becomes slowerAs shown in Figure 2(b) when the initial height is 138 kmthe range to target for the maximum final velocity is close to115 km and the impact velocity is close to 2050ms
Using the initial parameters as shown in Table 1 theequation of motion (1) with guidance logic (3) is integratedto get the flight characteristics of projectile in different initial
International Journal of Aerospace Engineering 5
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
18
16
14
12
10
8
6
4
2
0
Hei
ght (
km)
0 25 5 75 10 125 15Range to target (km)
(a) Comparison of height and range to target
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
0 1 2 3 4 5 6 7 8 9minus90
minus60
minus30
0
Time (s)
120579(d
eg)
4000
3000
2000
1000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9Time (s)
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9minus70minus60minus50minus40minus30minus20minus10
0102030
Time (s)
ny
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 3 Comparison of flight characteristics of projectile in different initial condition
velocities Analyzing the results shown in Figure 3(a) toFigure 3(d) the result finds that the trajectories of projectilefor maximum impact velocity are close to the parabolasand the final impact direction AOA and overloading satisfythe constraints So the feasibility of new initial parameteroptimization method used in this work is validated bycomparison to the results shown in Figures 2 and 3 The newmethod can obtain the optimal initial parameters of guidedprojectile for different cost functions with the multipleconstraints
As shown in Figure 3(d) the maximum overloadingof projectile is saturated for long time during flight indifferent initial conditions it goes against the adaptability ofprojectile to the error and disturbance In fact the maximumoverloading should be smaller than the limit With theconstraint 119899
119910lt 60 the optimal initial parameters for
maximum impact velocity are solved by the new method asshown in Table 2
Table 2 Optimal initial position with more severe constraint
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3400 15781 14098 2021minus15 3600 16562 14149 2114minus15 3800 18232 16094 2175
Contrasting the results shown in Table 1 in the sameinitial velocities the initial heights are higher and the rangesto target are farther but the maximum final velocities withconstraint 119899
119910lt 60 are slower than the results with constraint
119899119910le 60The comparison of flight characteristics in different initial
conditions set out in Table 2 is shown in Figure 4 The max-imum overloading in different initial conditions as shownin Figure 4(d) is smaller than 60 it is propitious to theadaptability of projectile to the error and disturbance
6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
Because the drag coefficient is defined as 119862119909(120572) = 119862
0
119909+
119862120572
1199091205722 the drag force119863 can be readily achieved
119863 =
1205880sdot 119890(minus119910119867)
1198812119878
2
1198620
119909+ 119862120572
119909[
119862119910 (120572)
119862120572
119910
]
2
(9)
By (9) and (6) (1) with control variable 120572 can be trans-formed to differential equations expressed by state variables[119909 119910 119881 120579] it is described as follows
119889119881
119889119905
= minus
1205880sdot 119890(minus119910119867)
1198812119878
2119872
1198620
119909+ 119862120572
119909[
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
119862120572
1199101205880sdot 119890(minus119910119867)
1198812119878
]
2
+ 119892119909ℎ
119889120579
119889119905
= 119870119866119863
minus119881 cos 120579 sin 120582119863+ 119881 sin 120579 cos 120582
119863
radic1199092+ 1199102
+119870119871119863(120582119863+ 120574119863119865)
119881 cos 120579 cos 120582119863+ 119881 sin 120579 sin 120582
119863
radic1199092+ 1199102
119889119909
119889119905
= minus119881 cos 120579
119889119910
119889119905
= 119881 sin 120579(10)
If the initial state x0is known the only final state x
119891is
readily obtained by integrating (10) So the initial parameteroptimization problem can be described as follows
Cost function
min 120593 (x0 x119891) (11)
Subject to
the dynamic constraints
x = f (x) (12)
the inequality constraints
|120572| =
10038161003816100381610038161003816100381610038161003816100381610038161003816
1
119862120572
119910
sdot
2 ( 120574119863119881 minus 119892
119910ℎ) sdot 119872
1205880sdot 119890(minus119910119867)
1198812119878
10038161003816100381610038161003816100381610038161003816100381610038161003816
le 120572LIMIT
10038161003816100381610038161003816119899119910
10038161003816100381610038161003816=
10038161003816100381610038161003816120574119863119881 minus 119892
119910ℎ
10038161003816100381610038161003816
119892ℎ
le 119899119910 LIMIT
10038161003816100381610038161003816119909119891
10038161003816100381610038161003816le CEP 119909
0gt 0 119910
0gt 0 119881
119891gt 0
(13)
the boundary conditions
1205790= 120579initial 119881
0= 119881initial 119910
119891= 119910terminal
120579119891= 120574119863119865
(14)
23 Discretization of Differential Equations For instance thecontinuous differential equations are discretized into thealgebraic equations by the Radau pseudospectral methodThe parameter optimization problem is described as follows
Cost functional
min 119869 asymp Φ (X(1)1 1199050X(119870)119873119870+1
119905119870) (15)
Equation constraint
equation of motion
119873119896+1
sum
119895=1
119863(119896)
119894119895X(119896)119895minus
119905119896minus 119905119896minus1
2
f (X(119896)119894 120591(119896)
119894 119905119896minus1 119905119896) = 0
(119894 = 1 119873119896)
(16)
equation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) = 0 (17)
Inequation constraint
angle of attack and overloading constraint
C(119896) (X(119896)119894 120591119894 119905119896minus1 119905119896) le 0 (119894 = 1 119873
119896) (18)
inequation of boundary condition
120601 (X(1)1 1199050X(119870)119873119870+1
119905119870) le 0 (19)
Then the initial parameter optimization problem of theequations of motion that satisfied the guidance logic is trans-formed to the nonlinear programming problem of algebraicequations expressed by state variables The optimal initialparameter can be computed by SQP
3 Results and Discussions
Assuming that the initial path angle and velocity exist theoptimal initial height and range to the target are solved to getthe maximum impact velocityThe problem can be describedas follows
Cost function
min minus119881119891 (20)
Subject to
the dynamic constraints
x = f (x) (21)
the inequality constraints
[
[
[
[
[
[
minus30∘
minus60
0
0
minus10m
]
]
]
]
]
]
le
[
[
[
[
[
[
120572
119899119910
1199100
1199090
119909119891
]
]
]
]
]
]
le
[
[
[
[
[
[
30∘
60
20 km50 km10m
]
]
]
]
]
]
(22)
4 International Journal of Aerospace Engineering
5 10 15 20 25 301100120013001400150016001700180019002000
Impa
ct v
eloc
ity (m
s)
Initial velocity 3200 ms
Initial height 1366 kmInitial height 1466 kmInitial height 1266 km
Range to target (km)
(a) Distribution for initial velocity 3200ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
Impa
ct v
eloc
ity (m
s)
Initial height 138 kmInitial height 128 kmInitial height 148 km
Initial velocity 3400 ms
Range to target (km)
(b) Distribution for initial velocity 3400ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
2200
Impa
ct v
eloc
ity (m
s)
Initial height 1528 kmInitial height 1428 kmInitial height 1628 km
Initial velocity 3600 ms
Range to target (km)
(c) Distribution for initial velocity 3600ms
5 10 15 20 25 301400150016001700180019002000210022002300
Impa
ct v
eloc
ity (m
s)
Initial height 1676 kmInitial height 1576 kmInitial height 1776 km
Initial velocity 3800 ms
Range to target (km)
(d) Distribution for initial velocity 3800ms
Figure 2 Distribution of the impact velocity and range to target computed by Monte Carlo method
the boundary conditions
[
[
[
[
1205790
1198810
119910119891
120579119891
]
]
]
]
=
[
[
[
[
minus15∘
119881initial0
minus90∘
]
]
]
]
(23)
Suppose that the mass of guided projectile is 450 kg theoptimal parameters for maximum final velocity in differentinitial velocities are shown in Table 1 With the increase ofinitial velocity the optimal initial height becomes higher theoptimal range to target becomes farther and the maximumimpact velocity becomes faster Comparing with the resultsas shown in Figure 2 the optimal heights and ranges to targetfor maximum impact velocities in different initial velocitiesare almost similar to the results computed by Monte Carlomethod
For instance when the initial velocity and path angleare respectively 3400ms and minus15∘ the optimal height andrange to target are respectively 138 km and 1148 km (shown
Table 1 The optimal initial position in different velocities formaximum impact velocity
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3200 1266 1058 1945minus15 3400 1380 1148 2045minus15 3600 1528 1319 2134minus15 3800 1676 1469 2205
in Table 1) and the maximum terminal velocity is 2045msCompared to the results shown in Figure 2(b) the resultsfind that while the initial height becomes higher or lowerthan 138 km the maximum final velocity becomes slowerAs shown in Figure 2(b) when the initial height is 138 kmthe range to target for the maximum final velocity is close to115 km and the impact velocity is close to 2050ms
Using the initial parameters as shown in Table 1 theequation of motion (1) with guidance logic (3) is integratedto get the flight characteristics of projectile in different initial
International Journal of Aerospace Engineering 5
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
18
16
14
12
10
8
6
4
2
0
Hei
ght (
km)
0 25 5 75 10 125 15Range to target (km)
(a) Comparison of height and range to target
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
0 1 2 3 4 5 6 7 8 9minus90
minus60
minus30
0
Time (s)
120579(d
eg)
4000
3000
2000
1000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9Time (s)
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9minus70minus60minus50minus40minus30minus20minus10
0102030
Time (s)
ny
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 3 Comparison of flight characteristics of projectile in different initial condition
velocities Analyzing the results shown in Figure 3(a) toFigure 3(d) the result finds that the trajectories of projectilefor maximum impact velocity are close to the parabolasand the final impact direction AOA and overloading satisfythe constraints So the feasibility of new initial parameteroptimization method used in this work is validated bycomparison to the results shown in Figures 2 and 3 The newmethod can obtain the optimal initial parameters of guidedprojectile for different cost functions with the multipleconstraints
As shown in Figure 3(d) the maximum overloadingof projectile is saturated for long time during flight indifferent initial conditions it goes against the adaptability ofprojectile to the error and disturbance In fact the maximumoverloading should be smaller than the limit With theconstraint 119899
119910lt 60 the optimal initial parameters for
maximum impact velocity are solved by the new method asshown in Table 2
Table 2 Optimal initial position with more severe constraint
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3400 15781 14098 2021minus15 3600 16562 14149 2114minus15 3800 18232 16094 2175
Contrasting the results shown in Table 1 in the sameinitial velocities the initial heights are higher and the rangesto target are farther but the maximum final velocities withconstraint 119899
119910lt 60 are slower than the results with constraint
119899119910le 60The comparison of flight characteristics in different initial
conditions set out in Table 2 is shown in Figure 4 The max-imum overloading in different initial conditions as shownin Figure 4(d) is smaller than 60 it is propitious to theadaptability of projectile to the error and disturbance
6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
5 10 15 20 25 301100120013001400150016001700180019002000
Impa
ct v
eloc
ity (m
s)
Initial velocity 3200 ms
Initial height 1366 kmInitial height 1466 kmInitial height 1266 km
Range to target (km)
(a) Distribution for initial velocity 3200ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
Impa
ct v
eloc
ity (m
s)
Initial height 138 kmInitial height 128 kmInitial height 148 km
Initial velocity 3400 ms
Range to target (km)
(b) Distribution for initial velocity 3400ms
5 10 15 20 25 301400
1500
1600
1700
1800
1900
2000
2100
2200
Impa
ct v
eloc
ity (m
s)
Initial height 1528 kmInitial height 1428 kmInitial height 1628 km
Initial velocity 3600 ms
Range to target (km)
(c) Distribution for initial velocity 3600ms
5 10 15 20 25 301400150016001700180019002000210022002300
Impa
ct v
eloc
ity (m
s)
Initial height 1676 kmInitial height 1576 kmInitial height 1776 km
Initial velocity 3800 ms
Range to target (km)
(d) Distribution for initial velocity 3800ms
Figure 2 Distribution of the impact velocity and range to target computed by Monte Carlo method
the boundary conditions
[
[
[
[
1205790
1198810
119910119891
120579119891
]
]
]
]
=
[
[
[
[
minus15∘
119881initial0
minus90∘
]
]
]
]
(23)
Suppose that the mass of guided projectile is 450 kg theoptimal parameters for maximum final velocity in differentinitial velocities are shown in Table 1 With the increase ofinitial velocity the optimal initial height becomes higher theoptimal range to target becomes farther and the maximumimpact velocity becomes faster Comparing with the resultsas shown in Figure 2 the optimal heights and ranges to targetfor maximum impact velocities in different initial velocitiesare almost similar to the results computed by Monte Carlomethod
For instance when the initial velocity and path angleare respectively 3400ms and minus15∘ the optimal height andrange to target are respectively 138 km and 1148 km (shown
Table 1 The optimal initial position in different velocities formaximum impact velocity
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3200 1266 1058 1945minus15 3400 1380 1148 2045minus15 3600 1528 1319 2134minus15 3800 1676 1469 2205
in Table 1) and the maximum terminal velocity is 2045msCompared to the results shown in Figure 2(b) the resultsfind that while the initial height becomes higher or lowerthan 138 km the maximum final velocity becomes slowerAs shown in Figure 2(b) when the initial height is 138 kmthe range to target for the maximum final velocity is close to115 km and the impact velocity is close to 2050ms
Using the initial parameters as shown in Table 1 theequation of motion (1) with guidance logic (3) is integratedto get the flight characteristics of projectile in different initial
International Journal of Aerospace Engineering 5
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
18
16
14
12
10
8
6
4
2
0
Hei
ght (
km)
0 25 5 75 10 125 15Range to target (km)
(a) Comparison of height and range to target
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
0 1 2 3 4 5 6 7 8 9minus90
minus60
minus30
0
Time (s)
120579(d
eg)
4000
3000
2000
1000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9Time (s)
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9minus70minus60minus50minus40minus30minus20minus10
0102030
Time (s)
ny
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 3 Comparison of flight characteristics of projectile in different initial condition
velocities Analyzing the results shown in Figure 3(a) toFigure 3(d) the result finds that the trajectories of projectilefor maximum impact velocity are close to the parabolasand the final impact direction AOA and overloading satisfythe constraints So the feasibility of new initial parameteroptimization method used in this work is validated bycomparison to the results shown in Figures 2 and 3 The newmethod can obtain the optimal initial parameters of guidedprojectile for different cost functions with the multipleconstraints
As shown in Figure 3(d) the maximum overloadingof projectile is saturated for long time during flight indifferent initial conditions it goes against the adaptability ofprojectile to the error and disturbance In fact the maximumoverloading should be smaller than the limit With theconstraint 119899
119910lt 60 the optimal initial parameters for
maximum impact velocity are solved by the new method asshown in Table 2
Table 2 Optimal initial position with more severe constraint
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3400 15781 14098 2021minus15 3600 16562 14149 2114minus15 3800 18232 16094 2175
Contrasting the results shown in Table 1 in the sameinitial velocities the initial heights are higher and the rangesto target are farther but the maximum final velocities withconstraint 119899
119910lt 60 are slower than the results with constraint
119899119910le 60The comparison of flight characteristics in different initial
conditions set out in Table 2 is shown in Figure 4 The max-imum overloading in different initial conditions as shownin Figure 4(d) is smaller than 60 it is propitious to theadaptability of projectile to the error and disturbance
6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
18
16
14
12
10
8
6
4
2
0
Hei
ght (
km)
0 25 5 75 10 125 15Range to target (km)
(a) Comparison of height and range to target
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
0 1 2 3 4 5 6 7 8 9minus90
minus60
minus30
0
Time (s)
120579(d
eg)
4000
3000
2000
1000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9Time (s)
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9minus70minus60minus50minus40minus30minus20minus10
0102030
Time (s)
ny
Initial velocity 3200 msInitial velocity 3400 ms
Initial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 3 Comparison of flight characteristics of projectile in different initial condition
velocities Analyzing the results shown in Figure 3(a) toFigure 3(d) the result finds that the trajectories of projectilefor maximum impact velocity are close to the parabolasand the final impact direction AOA and overloading satisfythe constraints So the feasibility of new initial parameteroptimization method used in this work is validated bycomparison to the results shown in Figures 2 and 3 The newmethod can obtain the optimal initial parameters of guidedprojectile for different cost functions with the multipleconstraints
As shown in Figure 3(d) the maximum overloadingof projectile is saturated for long time during flight indifferent initial conditions it goes against the adaptability ofprojectile to the error and disturbance In fact the maximumoverloading should be smaller than the limit With theconstraint 119899
119910lt 60 the optimal initial parameters for
maximum impact velocity are solved by the new method asshown in Table 2
Table 2 Optimal initial position with more severe constraint
1205790(∘) 119881
0(ms) 119910
0(km) 119909
0(km) 119881
119891(ms)
minus15 3400 15781 14098 2021minus15 3600 16562 14149 2114minus15 3800 18232 16094 2175
Contrasting the results shown in Table 1 in the sameinitial velocities the initial heights are higher and the rangesto target are farther but the maximum final velocities withconstraint 119899
119910lt 60 are slower than the results with constraint
119899119910le 60The comparison of flight characteristics in different initial
conditions set out in Table 2 is shown in Figure 4 The max-imum overloading in different initial conditions as shownin Figure 4(d) is smaller than 60 it is propitious to theadaptability of projectile to the error and disturbance
6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
0 2 4 6 8 10 12 14 16 1802468
101214161820
Hei
ght (
km)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
Range to target (km)
(a) Comparison of height and range to target
0 1 2 3 4 5 6 7 8 9 1020002500300035004000
Velo
city
(ms
)
0 1 2 3 4 5 6 7 8 9 10minus90
minus60
minus30
0Time (s)
Time (s)
120579(d
eg)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(b) Comparison of velocity and path angle
0 1 2 3 4 5 6 7 8 9 10minus30
minus25
minus20
minus15
minus10
minus5
0
5
10
Time (s)
AOA
(deg
)
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(c) Comparison of AOA
0 1 2 3 4 5 6 7 8 9 10minus60
minus50
minus40
minus30
minus20
minus10
0
10
20
Time (s)
ny
Initial velocity 3400 msInitial velocity 3600 msInitial velocity 3800 ms
(d) Comparison of overloading
Figure 4 Comparison of flight characteristics with severe overloading constraint
4 Conclusions
A new algorithm is developed for initial parameters opti-mization of guided projectiles by discretizing equations ofmotionwith guidance logic based on pseudospectralmethodThe method can solve the initial parameters optimizationproblem with multiple constraints using SQP The initialparameters solved by the new method for maximum impactvelocity are similar to the results solved by Monte Carlomethod and the flight characteristics solved by integratingthe equations of motion in the optimal initial conditionssatisfy the all constraints
References
[1] P Lu D B Doman and J D Schierman ldquoAdaptive terminalguidance for hypersonic impact in specified directionrdquo OMB0704-0188
[2] V C Lam ldquoCircular guidance laws with and without terminalvelocity direction constraintsrdquo in Proceedings of the AIAAGuid-ance Navigation and Control Conference and Exhibit HonoluluHawaii USA August 2008
[3] Y Zhang W Zhang J Chen and L Shen ldquoAir-to-groundweapon delivery trajectory planning for UCAVs using gausspseudospectral methodrdquo Acta Aeronautica et AstronauticaSinica vol 32 no 7 pp 1240ndash1251 2011
[4] V L Siewert J C Sussingham and J A Farm ldquo6-DOFenhancement of precision guided munitions testingrdquo in Pro-ceedings of the 36th AIAA Paper on Aerospace Sciences Meetingand Exhibit Reno Nev USA 1998
[5] H Guo-Qiang N Ying C Fang et al ldquoOptimal releasecondition of no-power gliding bombrdquo Flight Dynamics vol 27no 1 pp 93ndash96 2009
[6] Z Han-YuanReentry Dynamics andGuidance Changsha Pressof National University of Defense Technology 1997
International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
[7] M-S Hou ldquoOptimal gliding guidance in vertical plane forstandoff released guided bomb unitrdquo Acta Armamentarii vol28 no 5 pp 572ndash575 2007
[8] P Williams ldquoJacobi pseudospectral method for solving optimalcontrol problemsrdquo Journal of Guidance Control and Dynamicsvol 27 no 2 pp 293ndash297 2004
[9] T R Jorris C S Schulz F R Friedl andAV Rao ldquoConstrainedtrajectory optimization using pseudospectral methodsrdquo in Pro-ceedings of the AIAA Atmospheric Flight Mechanics Conferenceand Exhibit Honolulu Hawaii USA August 2008
[10] C L Darby and A V Rao ldquoAn initial examination of usingpseudospectral methods for timescale and differential geomet-ric analysis of nonlinear optimal control problemsrdquo in Proceed-ings of the AIAAAAS Astrodynamics Specialist Conference andExhibit Ontario Canada August 2008
[11] E R Hartman and P J Johnston ldquoMach 6 experimental andtheoretical stability and performance of a cruciform missile atangle of attack up to 65∘rdquo NASA Technical Paper 2733 1987
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of