Regional Water Budget Estimation Using a Constrained...
51
Data Assimilation for Estimating the Terrestrial Water Budget Using a Constrained Ensemble Kalman Filter MING PAN AND ERIC F. WOOD Department of Civil and Environmental Engineering Princeton University, Princeton NJ 08544, USA July 1, 2005 (revised manuscript submitted to Journal of Hydrometeorology for the special CAHMDA issue) Corresponding Author: Ming Pan Department of Civil and Environmental Engineering Princeton University, Princeton NJ 08544, USA Email: [email protected] Tel: +1-609-258-6383 1
Transcript of Regional Water Budget Estimation Using a Constrained...

Data Assimilation for Estimating the Terrestrial Water Budget Using a
Constrained Ensemble Kalman Filter
MING PAN AND ERIC F. WOOD
Department of Civil and Environmental Engineering
Princeton University, Princeton NJ 08544, USA
July 1, 2005
(revised manuscript submitted to Journal of Hydrometeorology for the special CAHMDA issue)
Corresponding Author:
Ming Pan
Department of Civil and Environmental Engineering
Princeton University, Princeton NJ 08544, USA
Email: [email protected]
Tel: +1-609-258-6383
1

ABSTRACT
A procedure is developed to incorporate equality constraints in Kalman filters, including
the Ensemble Kalman filter (EnKF) and is referred to as the Constrained Ensemble
Kalman Filter (CEnKF). The constraint is carried out as a two-step filtering approach,
with the first step being the standard (Ensemble) Kalman filter. The second step is the
constraint step carried out by another Kalman filter that optimally redistributes any
imbalance from the first step. The CEnKF is implemented over a 75,000 sq. km. domain
in the Southern Great Plains region of the United States, using the terrestrial water
balance as the constraint. The observations, consisting of gridded fields of the upper two
soil moisture layers from the Oklahoma Mesonet system, ARM/CART Energy Balance
Bowen Ratio (EBBR) latent heat estimates and USGS streamflow from unregulated
basins, are assimilated into the Variable Infiltration Capacity (VIC) land surface model.
The water balance was applied at the domain scale, and estimates of the water balance
components for the domain are updated from the data assimilation step so as to assure
closure.
2

1. Introduction
Understanding and evaluating the distribution and cycling of water in different forms in
the land-atmosphere system is a central question in many hydrological studies (Roads et
al., 2003). More specifically, estimates of water cycle components include, for the
atmosphere budget, the atmospheric moisture divergence, storage, precipitation and
evapotranspiration, and for the terrestrial water budget, the soil moisture storage,
surface/subsurface runoff, precipitation and evapotranspiration. The terrestrial and
atmospheric water budgets are linked via the common terms of the precipitation and
evapotranspiration fluxes. Therefore better understanding of the terrestrial water budget
would improve our knowledge of the global hydrologic cycle and its dynamics, and thus
improve our skills in modeling, forecasting and analyzing the land-atmosphere system.
A number of studies are devoted to assessing these water budget components at different
temporal and spatial scales using a variety of approaches. One example is the Global
Energy and Water Cycle Experiment project (GEWEX) and the Water and Energy
Budget Synthesis (WEBS) within it (Roads et al., 2003). One of the important goals of
these efforts is to provide consistent estimates of the water cycle components using
observations such that the mass balance of water is closed. The widely used approaches
to evaluate the terrestrial water cycle can be divided into three categories: (1)
observations based on in-situ measurements, which for some variables, like evaporation,
are poorly or sparsely measured (or both); (2) derived estimates based on ground-and
space-based remotely sensed observations; and (3) estimates based on land surface
3

models (LSM), either coupled or uncoupled with the atmosphere. The estimates from the
three approaches can be combined through data assimilation, and is the approach from
the re-analysis efforts of major weather centers like the European Centre for Medium
Range Weather Forecasting (ECMWF) or the National Center for Environmental
Prediction (NCEP).
Direct observation is the most traditional approach for water budget estimates and
considered reliable at the scale of measurement. An observation-based water budget
analysis at a large basin scale was conducted by Ropeleski and Yarosh (1998) over the
central U.S., and the results provide very useful insights on the annual and inter-annual
dynamics of the water cycle. An important limiting factor of the observational approach
is data availability. At large scales, e.g., regional to continental scales, dense networks of
instruments are just too expensive and infeasible to deploy. Fortunately, the fast
developing remote sensing, especially from space, and the corresponding retrieval
techniques are increasing the potential to monitor the global land surface (Jackson et al.,
2002).
Terrestrial water and energy budget simulations using either climate models or off-line
land surface models are another approach to water budget analyses. An advantage of this
approach is that the physical consistency (i.e. closure of the water and energy budgets) is
maintained by construct in the models. Off-line land surface models need meteorological
forcing fields, which could be taken from data archive (Abdulla et al., 1996; Nijssen et al,
2001) or from atmospheric model analysis (Maurer et al., 2001). This makes the
4

modeling approach feasible over continental to global areas (Ziegler et al., 2003), and at
different temporal and spatial scales. After careful calibrations, land models can produce
reliable results over many areas (Abdulla et al., 1996; Nijssen et al., 2001). A major
drawback of a modeling-only approach for water budget estimation is that models are not
perfectly parameterized or calibrated – errors and biases exist and propagate through time.
Data assimilation techniques combine the virtues of observations and modeling by fusing
them together. The assimilation techniques have been studied and used for decades in
meteorological and oceanic applications. It is a common practice to assimilate
observations in atmospheric studies to do analysis and reanalysis. For example, the
global NCEP/NCAR Reanalysis (Kalnay, 1996), and more recently the reanalysis by
ECMWF (European Centre for Medium-Range Weather Forecasts, 2002) and the North
American Regional Reanalysis (NARR) by NCEP. In hydrologic studies, data
assimilation has not been fully utilized, especially with remotely sensed data
(McLaughlin, 2002), though a number of assimilation studies have been performed
(Reichle et al., 2001, 2002; Crow and Wood, 2003; Crow, 2003).
As already mentioned, it’s important to obtain estimates of the water budget variables
that satisfy closure. Estimations of the water budget from observations alone rarely close
themselves due to measurement inaccuracy, interpolations errors, sparse data and so forth.
The non-closure or imbalance problem is also often seen in data assimilation approaches.
For instance, the Ensemble Kalman Filter (EnKF) (Evensen, 1994) is a widely used data
assimilation scheme. When EnKF is applied to a land model, it updates the soil moisture
5

states using the measurements obtained. This modification to soil moisture may destroy
the balance established in the model. This does not mean the EnKF itself does not
conserve the water mass. This is because EnKF provides an ensemble of state forecasts,
and subsequently filtered states, at an instantaneous time, while the water balance
constraint involves not only instantaneous states but also integration of fluxes over a
time-step. The broken water balance in current EnKF practice gives the motivations in
this study to impose some “constraint” on the assimilation procedure to maintain the
water balance.
The focus of the paper is development and application of a constrained data assimilation
approach that allows the merging of land surface state and flux observations assimilated
into a land surface model while maintaining closure of the water budget. Our
Constrained Ensemble Kalman Filter (CEnKF) is developed as a two-step filtering
approach, with the first step assimilating in-situ measurements of the water budget into a
land surface model and the second step being the constraint step where the imbalance
term is optimally distributed among the terms of the water budget. The development of
the generalized constrained filter is presented in section 2 and in a form that can be
applied to all classes of Kalman filters: linear, non-linear and ensemble-based. The
application of the water balance constraint is presented in section 3. In section 4, the
approach is applied to a 75,000 sq km domain utilizing the Ensemble Kalman Filter
(EnKF) (Evensen, 1994) in the data assimilation step with the Variable Infiltration
Capacity land surface model (Liang et al, 1994; 1996; 1999.)
6

2. Contrained Kalman filters: Theoretical Development
The theory of state estimation and the filtering of system and measurement noise extends
back four decades to the development of the Kalman filter for linear state estimation with
additive Gaussian noise (Kalman, 1960), and is well documented in numerous papers and
textbooks (e.g. Ho and Lee, 1964; Gelb, 1974; Anderson and Moore, 1979). The
application of classical linear Kalman filtering to hydrologic problems extends back to
the 1970s (see Wood and Rodriguez-Iturbe, 1975; Kitanidis and Bras, 1980; McLaughlin
and Wood, 1988). For hydrological problems where side constraints such as the closure
of the water balance is important, the development of a constrained Kalman filter and its
application for regional water balance filtering has not occurred to date.
In this section we formulate the constrained Kalman filter as an unconstrained filter plus
a second filter that imposes the constraints. A brief overview of the Kalman filter will
facilitate the presentation of the constrained version.
a. Kalman filters
Assume that the dynamical hydrological system is described by a vector of states x , and
its time evolution by the equation
kkkkkk wuxx ++= ++ )()( 11 BF (1)
where uk+1 are exogenous forcings from time k to k+1 weighted by B , w)(⋅k k is an
additive noise term that represents the uncertainty in the state dynamics and F is )(⋅k
7

referred to as the state transition function. Basically equation (1) represents the model of
the system, which for the terrestrial hydrosphere would be a land surface model, forced
by precipitation, surface meteorology and incoming solar and longwave radiation. The
model parameterization are contained in )(⋅kB and )(⋅k
)
F . Due to incorrect specifications
of or F , and spatial heterogeneities or scale effects, or uncertainties in their
parameters and constants, or perhaps uncertainty in the forcings (which is usually
assumed perfectly known in classical filtering), the predictions of the states at time k+1
are uncertain. This uncertainty is usually represented by an additive noise to equation (1),
which is represented by w
)(⋅kB )(⋅k
k.
(kk H=
)
kvkz +
kk B w++ +1
System outputs are described by the equation
kxy (2)
where H describes the relationship between the states x and the outputs y. For a
hydrologic system, the outputs usually include all the terms in the water balance (i.e. soil
moisture, runoff, evapotranspiration, drainage, etc.) It is the case that the outputs are
measured with error v
(⋅k
k so that the quantity ky= represents (noisy) measurements
of the system outputs.
1) DISCRETE LINEAR KALMAN FILTER.
For the case where (1) and (2) are linear:
kkkk uxFx =+1 (3)
8

z kkkkkk vxHvy +=+= (4)
and the system and measurement noise are additive Gaussian and independent of each
other (i.e. wk and vk independently distributed and , where
and ), the minimum error variance estimation of the
system state at k given the measurement z
),( kN Q0 ),( kN R0
][ Tkkk wwQ E= ][ T
kkk vvR E=
k is
)](ˆ[)(ˆ)(ˆ −−+−=+ kkkkkk xHzKxx (5)
where is the filtered (or updated) estimate of the state at time k considering the
measurement z
)(ˆ +kx
k and , the state forecast at time k using measurements up to time k-1.
The quantity is the forecast of the system output, the difference between this
and the measurement of the system output z
)(ˆ −kx
)−(ˆ kkxH
k is νk = )(ˆ −− kkk xHz and is referred to as
the innovation. In equation (5), the updating of the state xk is weighted between the
forecast x and the innovation ν)(ˆ −k k, and is referred to as the Kalman gain whose
value is computed by
kK
(6) 1])([)( −+−−= kT
kkkT
kkk RHPHHPK
where is the error covariance of the state forecast )(−kP )(ˆ −k
kRyy +
x . It can be shown that the
cross-covariance between the system state and measurement is
and the covariance of the system measurement Σ o
that the Kalman gain can be expressed as:
Tkk HPΣΣ xyxz )(−==
kT
kkk RHPH +−= )( sΣzz =
(7) 11 ][ −− +== kk RΣΣΣΣK yyxzzzxz
9

The time evolution of the system (one-step-ahead prediction) is simply done by:
11 )(ˆ)(ˆ ++ ++=− kkkkk uBxFx (8)
These equations (5, 6 and 8), plus equations that update the state covariance during the
prediction step and update steps (not shown) consist of the Kalman filter algorithm.
2) ENSEMBLE KALMAN FILTERS.
For highly non-linear models and situations where the system and measurement errors are
non-stationary and non-Gaussian, the above approaches can present significant
difficulties. As an alternative to solving the Kalman gain and updating the state error
covariance, the state error can be represented/updated and the Kalman gain can be
computed within a Monte Carlo framework. This approach developed by Evensen (1994)
is referred to as an Ensemble Kalman Filter (EnKF). Given error models that represent
the uncertainties in the state and measurement equations, an ensemble of state projections
from time k to k+1 (equation 3) and measurements at time k (equation 4) can be
generated. Here the errors models can be more general than assumed in equations (3) and
(4) in that they can be non-Gaussian, non-additive, represent errors in the input vector u
or parameters of )(⋅F , B or )(⋅ )(⋅H , but deviating away from the error specification
discussed above may result in ‘non-optimal’ filtered state estimates – that is, there is no
guarantee that the state error covariance is minimized and the innovation time series, the
time series of the difference between predicted measurements and the measurements, νk =
have zero temporal correlation. )(ˆ −− kkk xHz
10

Given the ensembles, the Kalman gain can be computed using equation (7) with the terms
and xyxz ΣΣ = yyΣ estimated from the ensembles. The ith ensemble member of the state
vector is updated using:
(9) ))](ˆ([)(ˆ)(ˆ )()()()( −−+−=+ ikk
ikk
ik
ik xzKxx H
Notice that the measurement zk are perturbed according to its error covariance Rk to
create an ensemble of values, which are used in the state update according to
equation (9) (Burgers, et al., 1998). EnKF is computationally feasible for complex land
surface models, can incorporate complex non-linearity within the models and allow
flexible error models. This is the filter approach that will be used in section 4 for
assimilating data for the regional water budget.
)(ikz
b. Adding equality constraints to state estimation
A significant shortcoming in the current use of data assimilation for water and energy
budget studies is that the approaches do not impose any constraints on the states, and thus
rarely preserve the water balance. For example, Betts and Ball (2003) found non-closure
of the water budget in the ECMWF ERA-40 over the Mackenzie basin to be
approximately 90 mm/yr, about 50% of the observed river discharge, while the recently
released NCEP North American Regional Reanalysis (NARR), which assimilated
observed precipitation, had non-closure of 70mm/year (Déry, personal communication
2005). Besides water and energy budget constraints, in many cases, there are other
known constraints, e.g. physical relationships between state variables, that can further
11

refine our estimation of the system state. Here we will present two approaches for adding
conservation constraints—i.e. equality constraints.
The first approach to constrain the state is structuring the output/measurement equation as
a budget constraint as perfect observations (Maybeck, 1979). Assuming perfect
observations during the computation of the Kalman gain (equation 4) and Kalman update
results in singularity in the observation error covariance matrix, but this does not present
any theoretical problems if we use Moore-Penrose pseudo inverse (Geeter et al., 1997).
Some authors argue that this singularity would lead to numerical problems, and more
ever, the added perfect observations increase the dimension of the matrices that are
inverted (Simon and Chia, 2002).
The second approach is to do post-filtering (i.e. two-step or sequential filtering), where a
second filter is constructed to satisfy the constraints (Simon and Chia, 2002). For
ensemble filtering applications, this approach is more suitable and easy to implement.
The first step consists of performing an unconstrained state estimation procedure using
any suitable Kalman filters approach, and its corresponding error models. The second
step is to perform another state estimation process that meets the constraints based on the
(unconstrained) estimates already obtained. This sequential filter algorithm could be
carried in on of two ways:
(1) Performing a second filter update using perfect observations to update the state
sequentially after the obtaining filtered estimates from an unconstrained filter. Note
12

that the “second filter update” referred here only filters a second but perfect
observation into the system state and no state transition (one-step-ahead prediction) is
performed since it’s already done in the first filter. Depending on whether the
constraints are linear or not, the second filter may be the standard Kalman Filter, an
Extended Kalman Filter or an Ensemble Kalman Filter. Processing observations
individually, rather than simultaneously incorporating all measurements obtained at a
particular time, is usually referred to as sequential processing (Sorenson, 1966), and
results from sequential processing are equivalent to simultaneous processing
(Sorenson, 1966) as long as the observations are independent.
(2) Optimal state estimation under constraints, where these methods are discussed in
Simon and Chia (2002). This approach takes the initial unconstrained state estimate
and corresponding errors as the starting point of a new estimation problem and tries to
find the best estimate that both satisfy the constraints and is optimal, based on a
criteria such as “maximum likelihood”, “least squares”, or “orthogonal projection”.
Since both approaches have the same estimation optimality criterion, it can be easily
shown that these two approaches are mathematically equivalent. In this paper the first
approach is used for its simplicity in derivation.
In the general case where the constraints are non-linear, we can express it as
kkkk gux =),(G (10)
13

where G is parameterization of the constraint that is a function of the state variables x
and the inputs u in the past time step from time k-1 to k. Without any loss of generality,
we can have m multiple constraints, and we can further define , a partitioned
vector of size n+l consisting of the n states and l forcing inputs. Then (10) becomes
and if the constraint is linear, then G . Note that expanded state
contains the forcing inputs as well, thus the constraint will be imposed on not only the
states but also the forcing inputs.
)(⋅k
kg=)
k
=
k
kk u
xx*
kk x( *G kkk gx =* *kx
The second or “constraining” filter takes the constraint as the observation equation. In the
linear case the observation function kk GH =" and the observations “observed”
without error; that is, . The Kalman gain for this constraining filter is, using the
above:
kk gz ="
0R ≡k"
(11) 1** ])([)(" −++= Tkkk
Tkkk GPGGPK
where is a partitioned error covariance matrix with the sub-
matrix being the filtered state error covariance at time k, and the
)(* +kP )()( lnln +×+ nn×
ll × sub-matrix the error
covariance of the inputs and the n l× sub-matrices the error cross covariance between
states and inputs. The dimension of is k"K mln ×+ )( , where m is the dimension of gk.
The update of the state equation at time k after the observation, was given by equations (5)
for the linear filter. After the application of the constraining filter, the state is updated
again using:
14

(12) )](ˆ[")(ˆ)(ˆ *** +−++=++ kkkkkk xGgKxx
If the constraint is nonlinear, it can be linearized, as with the Extended Kalman Filter
(EKF), given the adjoint
(13) */' kkk xG ∂∂= G
so that the Kalman gain is computed as
(14) 1** ]')('[')(" −++= Tkkk
Tkkk GPGGPK
and the post-constraint update state:
(15) ))](ˆ([")(ˆ)(ˆ *** +−++=++ kkkkkk xgKxx G
In applications of the Ensemble Kalman filter (EnKF), K can be computed in the same
way from the ensemble of and as is computed from the
ensemble of and H :
k"
kK)(ˆ )(* +i
kx
(ˆ( )(ikk x
))(ˆ( )(* +i
kk xG
)(ˆ )( −ikx ))−
(16) 1""" −= zzxz ΣΣK k
where and are both computed from the ensemble. It should be noted that
is the cross covariance between state and predicted output and is the
covariance of . Each ensemble member can then be constrained respectively
using:
xzΣ" zzΣ"
)( *kk x
xzΣ"
*kx )( *
kk xG zzΣ"
G
(17) ))](ˆ([")(ˆ)(ˆ )(*)(*)(* +−++=++i
kkkki
ki
k xgKxx G
Note that every ensemble member will satisfy the constraint.
15

3 Implementation of CEnKF with the VIC Hydrologic Model
a Hydrological Model and System State
The Variable Infiltration Capacity (VIC) macro-scale land surface model (Liang et al.,
1994) is used as the hydrologic model, which provides the state transition functions )(⋅kF
and B in the filtering system. VIC is forced with meteorological and radiative inputs,
and computes the terrestrial states (snow water, soil moisture, soil ice content, surface
and subsurface temperatures) as well as the water and energy fluxes. VIC works at a
spatial grid scales ranging from ~5 to 500-km. The number of vertical layers may vary,
and is set to 3 in the simulations performed here. In this study, which is over the southern
great plains region of the U.S., cold season processes are not that significant even in the
winter, so snow/ice features while still part of the VIC simulations have been ignored.
Also, for the assimilation experiments being reported here, only observations related to
the water budget were used (i.e. soil moisture, evapotranspiration and runoff), and we
have essentially ignored the energy budget equation. Therefore, the state of the
hydrologic system at time-step k is defined as:
)(⋅k
kx
(18) Tkkkk sss ][ ,3,2,1=x
where , , are volumetric soil moisture content in the 3 soil layers. We should
include the vegetation interception storage as a state variable, and it is computed within
VIC. For ease of presentation and because we don’t have interception storage
1s 2s 3s
16

measurements we’ve ignored this state variable in equation 18.The forcing term u can
be defined as the precipitation input (even though for completeness we could expand this
to include all surface meteorological variables used to force the model):
k
kk p=u (19)
b. System Output
Measurements are evapotranspiration e from flux towers, runoff q from river gauges, and
the first two layers of soil moisture s1 and s2. The variables s1 and s2 are system state
variables, and e and q are functions of the system state and forcing variables:
and . These functional relationships
and are parameterized in VIC (see Liang et al 1994; Liang et al., 1999;
Peters-Lidard et al, 1998); for example using the Penman-Monteith-Jarvis
parameterization for surface evapotranspiration. So the system output is:
),,,( ,1,1,1 kkkkkk psssee =
)(⋅ke )(⋅kq
),,,( ,1,1,1 kkkkkk psssqq =
(20) Tkkkkk qess ][ ,2,1=y
And in the output equation is
) (21) (),( *kkkkkk xuxy HH ==
where we define the expanded state vector as in the last section:
(22) Tkkkk
k
kk psss ][ ,3,2,1* =
=
ux
x
)(⋅kH is a partitioned matrix consisting of a linear portion that describes the measurement
equations for the states and a non-linear portion that reflects those output variables that
17

are derived from the states; namely and . With this, H assumes the
following form:
)( *kk xe
0,0,1,00,0,0,1
1
)( *kk xq
kk
T
e
(, *x
3s
)(⋅k
++
)]1,1,3,2 ≡++ −k ss
ks ,3
k
krkk s
ks ,1 s
ks ,2
(23)
T
kkkkk q
⋅
= )(),)( *** xxxH
c. Water Balance Constraint
VIC is a 1-dimensional hydrologic model, which means the model treats the land (soil
and vegetation above) as a 1-D column and the lateral fluxes of moisture are ignored.
Thus the water mass balance defined for this 1-D column can be written in terms of p, e,
q and change in total soil water storage s 2s . Define the water balance residual (i.e.
imbalance term) , which must be zero if mass balance is maintained. Thus, kr
()[( 1,31,2,1 =+−+−−− −− kkkkkk sssqep (24) 0
The above asserts the fact that the incoming precipitation is partitioned to the outgoing
evapotranspiration and runoff fluxes, and the change in land moisture storage. As
mentioned, the winter is warm in the study case here and the impact of snow/ice storage
is ignored in equation (24), but is included in the water balance as computed by the VIC
model. Among the nine terms above, , , are current states; variable is a
forcing term; variables e and are both functions of the moisture states and
precipitation forcing. Note that , and are instantaneous states at time k, while
, and are accumulations of fluxes from time k–1 to k. All the above 6 terms
k,2
s
kp
k kq
s ,1 k ,3
kp kp kp
18

can be included in expanded state x defined in equation (22). The three remaining terms,
, s and , are states at the previous time-step and are treated as known
without error from their estimation at time k-1. This is done to avoid their adjustment at
time k, which would result in a water budget imbalance at time k-1. Alternatively the
data could be assimilated via a Kalman Smoother, rather than a Kalman Filter, which
would allow future observations to contribute to the estimation of the states at previous
time steps (Dunne and Entekhabi, 2005). If we re-write the constraint equation (22) in
the form ofG , we have on the left hand side
*k
s[( ,1
1,1 −ks 1,2 −k
kG
1,3 −ks
kx =)*
kp=)
kk g(
k −( *x
0=kg
kH"
" =kz )⋅
k
1( *kx
(" *kk x
)(⋅
) −= [ ]1 ⋅
(25) kkkkkkkkk rsssssqe ≡++−++−− −−− )]() 1,31,21,1,3,2
and on the right hand side
0=kg (26)
So in the constraining filter, we have )()( ⋅=⋅ kk" GH and the “perfect” measurement is
. H computes the residual term from the expanded state vector ,
so it includes e and , and has the form:
*kx
)(⋅kq
(27) )()()(11 1,31,21,1***
−−− +++−−−− kkkkkkkk sssqe xxx
Without loss of generality, gk can be set equal to the ‘known’ values of the moisture
states at time (k –1) and these variables can be removed from equations (25) and (27). In
this case, the residual term from the imbalance would be augmented by the moisture
states at time (k –1).
19

In ensemble form, the ensemble member notation is added correspondingly. Since )(⋅kG
gives the residual term, gives the residual term of each i)())(ˆ( )()(* +=+ ik
ikk rxG
k"K
th ensemble
member after the data assimilation step; i.e. the first filter. Therefore, and ,
needed for computing the gain in constraining filter , are the cross
covariances between the expanded state and residual, and the covariance of the residual
in the ensemble respectively. After is obtained, the constraint is applied following
equation (15)
xzΣ" zzΣ"
1""" −= zzxz ΣΣK k
(28) ))(ˆ(")(ˆ))](ˆ([")(ˆ)(ˆ )(*)(*)(*)(*)(* +−+=+−++=++i
kkki
ki
kkkki
ki
k xKxxgKxx GG
Equation (28) shows that the constrained state is the unconstrained state
plus an adjustment equal to the term . If, in any ensemble
member, the residual term is not zero, then equation (28) redistributes this
residual term across the water balance components in x and obtains mass balance.
The gain K determines how the residual term (mass balance error) will be redistributed
to the augmented state variables , , q , , and . Further inspection of
shows that Σ determines the adjustment made to each variable. The
larger error covariance that a particular variable has in and the larger
correlation between this variable and the residual, the larger is the corresponding row in
and the larger adjustment made to that variable. This results are intuitively correct –
)(ˆ )(* ++i
kx
("− kkK G
ˆ *k
k,1 ks ,2
x̂
)(ˆ )(* +i
kx
"" = ΣK k
xzΣ"
))(ˆ )(* +i
kx
)()(++
i
s ks ,3
)()(* ++i
k
))(ˆ( )(* +i
kk xG
kp ke
xz"
k"
"xz Σ
k
1−zz
20

variables with large errors and/or highly correlated to the residual are adjusted more than
variables with small errors and/or low correlations.
4. Implementing CEnKF Data Assimilation for Water Budget Estimation
a. Study area and data sources
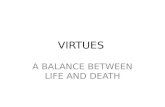
The study area was chosen as the Southern Great Plains (SGP) region that consists of the
ARM-CART SGP experimental area within Oklahoma, shown in Figure 1 as the thick
box. A number of research experiments and facilities are deployed in this box region, and
all terrestrial water budget variables are measured. Evapotranspiration is measured by
ARM-CART Bowen Ratio instruments (crosses in Figure 1), which report latent heat flux
every 15 minutes. Soil moisture is measured by Oklahoma Mesonet stations (dots in
Figure 1), and the measurements are taken hourly at 4 depths: 5cm, 25cm, 65cm, and
75cm. There are 44 Mesonet stations with >90% complete records. Runoff/streamflow
measurement is the hardest part due to human regulation of streamflow. A study by
Wallis et al. (1991) identified a set of unregulated or very slightly regulated basins
gauged by U.S. Geological Survey (USGS) across the United States, and within our study
area and its nearby vicinity there are 48 that are used here. They are outlined in Figure 1,
and are used to estimate the runoff from the measured daily streamflow. The
meteorological forcing fields come from the 50-year long-term retrospective North
American Land Data Assimilation System (NLDAS) project database created by
University of Washington (Maurer et al., 2002), in which the precipitation and air
21

temperature are gridded from National Oceanic and Atmospheric Administration (NOAA)
Cooperative Observer (COOP) ground observations.
b. Water Budget Model Simulations
In this study, the VIC modeling grid pixel size is set to 0.5 degree (~50km) with the
modeling domain being a 6×5 pixel box (see the gray grids in Figure 1). For this study
the VIC land surface model was run in a “water-balance mode”, so the simulation is
performed at a daily time-step. All sub-daily observations except soil moisture were first
aggregated to daily values and interpolated to 0.5deg grid by simple linear interpolation.
For soil moisture, the instantaneous values were spatially interpolated from the Oklahoma
Mesonet measurements. Latent heat measurements from ARM-CART flux towers were
converted to an equivalent evapotranspiration depth (volume per unit area) and
interpolated over the modeling domain. The USGS streamflow measurements were also
converted to a depth per unit area using the gauged area, and interpolated across the
domain. Due to the widely distributed river regulation structures in the area, the number
of USGS gauge basins selected is limited and they are sparsely located (Figure 1). Also,
the interpolation procedure treats the streamflow, in units of discharge per unit area for a
basin, as if it is a point value at the geometric center of the basin. The lack of data and
simple interpolation scheme increases the uncertainties in the streamflow observations so
obtained. To evaluate the interpolation uncertainties, a “leave-one-basin-out” cross-
validation procedure was performed. It was found that the average root mean squared
error (RMS) for the missing basin during interpolation is 0.1910 mm/day, ranging from
22

0.0361 to 0.4085 mm/day. Compared to the mean streamflow depth of the region, 0.8059
mm/day, such interpolation errors are about 24%.
A two-year simulation period was used for the study from 1 October 1997 to 30
September 1999. This period was used because the available observational data (soil
moisture, latent heat and streamflow) were available.
For the Ensemble Kalman Filter, an ensemble of model replicates (ensemble members)
are created that represents properly the uncertainties and errors associated with the model
(i.e. the system equation—see section 2). This is usually done by perturbing (i.e. adding
noise to) the model initial conditions, forcing fields, and/or parameters etc. Prior to this
study and as part of the long-term retrospective NLDAS simulations, the VIC parameters
were calibrated for the Red-Arkansas basin, which contains the study area, so they were
not perturbed here. In most water budget simulations with a well-calibrated model, most
of the uncertainties come from the uncertainties in the estimated precipitation used to
force the model and initial soil moisture. Other significant sources include near surface
meteorological conditions like surface air temperature, humidity, and wind. For this
study the precipitation was perturbed using a Monte Carlo method developed by J.
Schaake (J. Shaake, National Weather Service, personal communication 2003; also see
Pan 2004) to create an ensemble of inputs. This ensemble generation method makes the
following assumptions:
(1) The observed and true precipitation amount can be treated as two jointly
distributed random variables, and the marginal probability distribution for both is
23

a lognormal distribution (when it rains) with a concentrated probability mass at
zero (probability of no-rain);
(2) Such a marginal distribution can be easily transformed to (and back from) a
standard Gaussian distribution via an equal-quantile transform. If both the two
random variables are transformed to standard Gaussian, their joint distribution
will be a bivariate Gaussian. The quality of the precipitation observations can then
be measured by the correlation coefficient of this bivariate Gaussian distribution
and the parameters in the equal-quantile transform.
(3) Given an observed precipitation value and transformed to standard Gaussian, the
conditional distribution of true precipitation can be derived, and this conditional is
transformed back to lognormal variate. Thus for a given precipitation observation,
an ensemble of possible true values can be simulated according to the conditional
lognormal distribution obtained above.
Over this study region, no detailed study is available that relates the grid averaged
measured precipitation to its ‘true’ value. But it is well known that these values are
related to gauge density, storm type and averaging intervals (Rodriguez-Iturbe and Mejia,
1974). So in generating precipitation ensembles, it is assumed that the true and observed
have the same mean/variance and their correlation coefficient is 0.8 in standard Gaussian
bivariate distribution. The number of ensemble members (ensemble size) is set to 20,
which balanced off the need for having a sufficiently large set of ensembles to
characterize the ensemble distribution and the computational effort of processing a large
number of runs. For shorted selected periods, larger ensemble sizes have been tested but
do not make any significant difference to the results.
24

The soil column in VIC is divided into 3 layers: the top layer is fixed at 10cm size; the
second is about 40cm (varies between 39~41cm), and the third, bottom layer is on
average 100cm, variable across the domain. On average, the top two layers of the
Mesonet point measurements (5-cm and 25-cm), when interpolated across the modeling
domain, compare well with the top two layers in VIC in that they are highly correlated
and display the same dynamics to precipitation forcings. Nonetheless, the Mesonet
measurements estimate point-scale soil moisture based on a heat dissipation sensor, while
the VIC land surface model represents the modeled volumetric grid-average soil moisture.
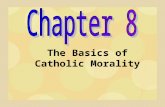
Due to disparities in scales, including both spatial scales from the Mesonet point-scale to
the VIC 0.5-degree spatial scale, and the 5-cm Mesonet to the 10-cm VIC modeling depth,
it is noted that the VIC soil moisture values are, on the average, consistently higher than
the Mesonet values (Figure 2). To remove this systematic scaling effect, we developed a
regression model that related the Mesonet soil moisture estimate to the VIC top layer
modeled estimates; resulting in Mesonet ‘adjusted’ estimates that were assimilated into
VIC. This approach removed the systematic biases between the VIC modeled predictions
and the Mesonet observations.
In summary, the assimilation experiment consisted of a 20-member VIC-based ensemble
that started on 1 October 1997 until 30 September 1999 at a daily time step. Every day,
at 0:00 local time, the Kalman filter updated the state equation with the Constrained
Kalman filter run sequentially using available observations. To compare the various
estimates of the domain-averaged water budgets, the following monthly estimates are
25

compared: (i) the budget based solely on observations, (ii) based solely on VIC model
simulations without any assimilation; (iii) from the VIC model simulations with the
assimilation of upper two layers of soil moisture, gridded evapotranspiration and gridded
runoff observations within a traditional ensemble Kalman filter (EnKF); and (iv) VIC
simulation, with the above assimilation and applying the Constrained Kalman Ensemble
Filter (CEnKF).
c. Results and discussions
Analyses of monthly water budgets (change in soil moisture balanced by precipitation,
evapotranspiration, and runoff; plus the corresponding residual/imbalance of non-closure)
from the four experiments (observation, VIC, VIC-EnKF, VIC-CEnKF) are plotted in
Figure 3-6. Ensemble means were used for assimilation experiments. Each figure
contains three panels: the top panel gives precipitation (line), evapotranspiration
(thatched bar) and runoff (solid bar); the middle panel gives the monthly change in soil
moisture; and the bottom panel gives the residual (imbalance) in the water budget.
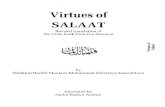
In the observationally-based water budget (Figure 3), the residuals are up to 47.2
mm/month, equal to many other terms in the budget and often exceeding the discharge or
change in soil moisture. Cumulatively over the two years, the imbalance is small -6.614
mm showing that the water budget is closed statistically over the period. The imbalance
time series appears to be positively correlated with the storage change (not shown), which
implies the observed soil moisture has a low dynamics bias.
26

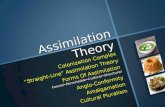
The VIC model-based water budget (Figure 4) has closure by construct. The model-
estimated evapotranspiration and runoff are close to the observations. The soil moisture
has a larger seasonal range than the Mesonet observations, but it is unclear which is more
reasonable or more accurate. The VIC model reproduces well the monthly time series of
observed runoff and evapotranspiration.
The traditional (unconstrained) EnKF assimilation-based water budget (Figure 5) is very
similar to the VIC simulations except for the runoff. Overall, the assimilation makes
some, but not a large, difference. This is because the VIC model is not seriously in error
and because the transformation between the VIC and Mesonet soil moisture helps reduce
the difference between the modeled and observed dynamic range in soil moisture. For
some months (especially October of 1998), the soil moisture dynamics are reduced
compared to the VIC-estimated values. The imbalances in the Ensemble Kalman filtered
water budget are large, reaching a maximum of -76.4 mm/month in March 1998.
Cumulatively, the imbalance is -41.4mm over the 2 years, larger than from the estimates
based on observations alone.
In the CEnKF experiment (Figure 6), the soil moisture dynamics is slightly larger
compared to unconstrained assimilation. The water balance is maintained by adjusting all
the variables, including the precipitation forcing. Overall, the differences between the
CEnKF and the EnKF are not large except that the imbalance is removed. Such subtle
improvements are viewed as a positive result, and are credited to the good underlying
27

performance of the land surface model. In areas that are more poorly gauged, or with
models that are poorly calibrated the differences among the observation-based, or model-
based or the CEnKF estimates may be more pronounced.
Additional details can be seen in the water budget component-by-component
comparisons of their monthly ensemble mean of filtered values, as shown in Figure 7.
The top panel shows adjustments by CEnKF (thick dashed lines) to the precipitation
forcings. The adjustment to precipitation (a feedback effect from soil moisture and
evapotranspiration measurements) turns out to be small, but we can still see that the
filtered precipitation is slightly reduced due to the lower observed soil moisture dynamics.
For evaporation (second panel), all the estimates are very similar except over the 3 dry
months in the late summer of 1998. During these months, soil moisture observation
added some water into the soil column and enhanced the evapotranspiration. For runoff
(third panel), some large discrepancies among the estimates are seen. For the climate of
the Southern Great Plains, the runoff ratio is low (especially in summer) so that runoff is
a relatively small part of the water budget. Thus, adjustments to runoff have a large
relative impact across the various estimates (observation only, modeling only, EnKF, or
CEnKF). The EnKF estimate produces much lower runoff values for the wet months due
to a reduction in deep soil moisture as a result of the assimilation of the Mesonet soil
moisture (bottom panel). The CEnKF in constraining the closure of the water budget
tends to increase the runoff. This alleviates much of the negative impact from the low
soil moisture in EnKF. This suggests that constraining the water budget will balance the
errors across the terms in the budget equation; thus providing better estimates.
28

In the panels for soil moistures in Figure 7 (forth and fifth), one notable feature is that the
EnKF time series almost always lies between the observations and the VIC simulations,
and that the CEnKF series almost always lies between the EnKF and VIC. Thus, the
Kalman filter blends the model and observations and finds a balance between the two
according to their relative errors—resulting in the filtered estimates lying between the
two. Because the VIC model has closure (by construct) while the observations don’t, the
constrained filter will have a balance between the model estimates and the EnKF
estimates.
Data assimilation itself also provides a mean of error trade-off/reduction within and
between different variables being simulated and observed, reflecting our uncertainties on
the target quantities. Such errors (uncertainties) are prescribed for observed and forcing
variables, and represented by the ensemble spread for states before and after the filtering
(prior and posterior errors). Table 1 lists the error values that are both prescribed and
calculated from the ensemble spread as a root mean squared measure. Note that these
values are averages over the whole experiment period and vary significantly during wet
and dry days. From the results, we can see that the model simulations tend to have much
higher confidence than the observations (lower prior uncertainties than observation
uncertainties) and filtering does reduce the uncertainties. Constrained assimilation
experiment yields slightly lower posterior uncertainties than unconstrained case for all
variables except for the bottom layer soil moisture due to the assimilation of the “perfect
observations”—i.e. the balance constraint. The increased uncertainties in bottom layer (~
29

1m thick) soil moisture in the constrained experiment is because this layer will
accommodate a large portion of imbalance errors for its relative large capacity and error
range, as already explained at the end of Section 3. Another reason is that no bottom layer
observation is available to reduce its uncertainties.
An ‘optimal’ filter should extract all the information contained in the observations used
to update the state equation. This results in an innovation time series being uncorrelated
in time, where the innovations are defined as the difference between the model predicted
observations and the observations. In theory, this condition holds for Kalman filters
applied to linear, Gaussian system with state and observation errors that are uncorrelated,
and where the error covariances for the state and measurement equations are correctly
specified. A filter with autocorrelated innovations suggests that an auto-regressive model
can be formulated that can make further use of information in the observations. In EnKF
formulations that are highly nonlinear and non-Gaussian, it is unclear that the optimality
condition of uncorrelated innovations can be assured. As suggested in Crow and Bindlish,
(2004) criteria used in standard Kalman filtering may sometimes be misleading in
hydrological data assimilation problems. Efforts were made to estimate the state and
measurement error covariances so as to have an auto-uncorrelated innovation time series,
but some residual level of correlation exists at short lag time (1~2 days) as can be seen in
Figure 8. Such residual correlation can be found in the constrained assimilation but not
the unconstrained case. This is due in part to the correlation in imbalance errors before
the constraint was applied (Figure 5), which violates the “uncorrelated system errors”
assumption for Kalman filter. Figure 8 shows the Auto Correlation Function (ACF) of
30

soil moisture innovations in EnKF and CEnKF experiments for one grid (latitude 34.75°,
longitude -97.75°). Further work is underway to better assess and characterize the spatial
and temporal error characteristics in sensors, such as the Mesonet soil moisture sensors,
and their effects on estimates from filtering.
5. Summary and Final Comments
This study introduces an EnKF based data assimilation procedure that incorporates
equality constraints; referred here as the Constrained Ensemble Kalman Filter (CEnKF).
The assimilation procedure is implemented to assure closure of the water balance over a
region when hydrological data are assimilated into model-based estimates. The
application of the constraint-based filter results in updated soil moisture states and also, if
uncertain, flux estimates and forcings. The procedure was applied to a domain in the
Southern Great Plains regions of the U.S. of approximately 75,000 sq. km. The CEnKF-
based water budget estimate is compared to three other estimates: observation-based
water budget, a VIC land surface model estimate, and an Ensemble Kalman filtering
(EnKF) data assimilation estimate where data (upper two layer of soil moisture, gridded
evapotranspiration and runoff) is assimilated.
The observation-based estimates closed the water budget statistically over the two-year
study period, but had relatively large monthly imbalances. The VIC-based model
estimates provided closure but had inconsistencies when compared to observations.
Estimates based on the EnKF blends the model estimates with observations but resulted
31

in relatively large imbalances at the monthly scale, and over the two-year period.
Estimates based on the CEnKF contains the benefits of the EnKF in that observations and
model estimates are merged with the assurance that the filtered estimates maintain water
balance closure.
The CEnKF effectively redistributes the EnKF non-closure term (the imbalance term)
across the terms in the water balance according to the error levels associated with these
terms and their correlation to the non-closure term. Thus, components with larger errors
are adjusted more. Also, from the viewpoint of adding information, imposing the water
balance constraint also adds new information to the assimilation system in addition to the
assimilation of the available observations, which is the balance of water, or zero residuals.
Compared to unconstrained data assimilation, the constrained assimilation incorporates
more knowledge about the hydrological system. The experiments performed over
Oklahoma region illustrated the power of CEnKF to remove imbalances and adjust the
trade-offs among variables. In addition, the water balance constraint reinforces the
coupling between the moisture states and the forcing inputs. As we see from these results,
the soil moisture observations can have a feedback to the precipitation inputs. This
feedback implies that there is a potential to use microwave measurement (signature of
soil moisture) to improve precipitation estimation. Crow (2003) used L-band microwave
brightness temperatures to adjust for precipitation errors due to temporally sparse rainfall
information. Updating precipitation, using observations from other water balance
components, holds great promise for synergistic use of in-situ and remotely sensed data,
32

but probably needs to be carried out within a CEnKF framework using the water balance
closure constraint to contain the errors.
It is our expectation that the CEnKF, with the constraints run as a sequential filter, holds
great promise for other, related problems including the use of constraints on the surface
energy balance, or constraints describing physical relationships between variables that
may not be appropriate as state equations.
Acknowledgements This research was supported through NASA research grant
NAG5-11610 and NOAA grant NA03O3AR4310001. These support are gratefully
acknowledged.
33

REFERENCES
Abdulla, F. A., D. P. Lettenmaier, E. F. Wood, and J. A. Smith, 1996: Application of a
Macroscale Hydrologic Model to Estimate the Water Balance of the Arkensas-Red
River Basin. J. Geophyis. Res., 101(D3), 7449–7459.
Anderson, B. D. O., and J. B. Moore, 1979: Optimal Filtering, volume 1. Prentice-Hall
Inc., Englewood Cliffs, New Jersey, 357 pp.
Betts, A. K., and J. H. Ball, 2003: Evaluation of the ERA-40 surface water budget and
surface temperature for the Mackenzie River basin. J. Hydromet., 4, 1194–1211
Burgers, G., P. J. van Leeuwen, and G. Evensen, 1998: Analysis Scheme in the Ensemble
Kalman Filter. Mon. Wea. Rev., 126, 1719–1724.
Crow W.T. 2003. Correcting land surface model predictions for the impact of temporally
sparse rainfall rate measurements using an ensemble Kalman filter and surface
brightness temperature observations, J. Hydrometeor. 4 (5): 960-973 Oct.
_______, and E.F. Wood. 2003 The assimilation of remotely sensed soil brightness
temperature imagery into a land-surface model using ensemble Kalman filtering: A
case study based on ESTAR measurements during SGP97, Advances in Water
Resources, 26:137-149.
34

_______, and R. Bindlish, 2004: The impact of incorrect model error assumptions on the
assimilation of remotely sensed surface soil moisture, Proceedings of the 2nd
international CAHMDA workshop (sponsored by Princeton University) on The
Terrestrial Water Cycle: Modelling and Data Assimilation Across Catchment Scales,
edited by A.J. Teuling, H. Leijnse, P.A. Troch, J. Sheffield and E.F. Wood, 145–148,
Princeton, New Jersey
Dunne, S., and Dara Entekhabi 2005. Estimation of soil moisture fields using multi-scale
observations in an ensemble smoother-based four-dimensional land data assimilation
system, Paper 1.10, 19th Conference on Hydrology, 85th American Meteorological
Society Annual Meeting, San Diego, January 10-13, 2005
European Centre for Medium-Range Weather Forecasts, 2002: The ERA-40 Archive.
Reading, ECMWF. Available online at http://www.ecmwf.int/research/era/index.html
Evensen, G., 1994: Sequential Data Assimilation with a Nonlinear Quasigeostrophic
MOdel using Monte Carlo Methods to Forecaste Error Statistics. J. Geophyis. Res.,
99(C5), 10143–10162.
Geeter, J. D., H. V. Brussel, and J. D. Schutter, 1997: A Smoothly Constrained Kalman
Filter. IEEE, Trans. Pattern Analysis and Machine Intelligence, 19(10), 1171–1177.
35

Gelb A., 1974: Applied Optimal Estimation. The MIT Press, pp 374.
Ho, Y. C., and R. C. K. Lee, 1964: A Bayesian Approach to Problems in Stochastic
Estimation and Control. IEEE Trans. Automat. Contr., AC-9, 333–339.
Jackson, T. J., A. Hsu, and P. O'Neill, 2002: Surface soil moisture retrieval and mapping
using high frequency microwave satellite observation in the Southern Great Plains, J.
Hydromet., 3, 688–699.
Kalman, R. E., 1960: A New Approach to Linear Filtering and Prediction Problems.
Trans. AMSE, J. Basic Eng., 82(D), 35–45.
Kalnay, E. (1996). The NCAR/NCEP 40-year Reanalysis Project. Bull. Am. Meteorol.
Soc., 77, 437–471.
Kitanidis, P. K., and R. L. Bras, 1980: Real-time Forecasting with a Conceptual
Hydrologic Model: 1. Analysis of Uncertainty. Water Resources Res., 16(6), 1025–
1033.
Liang, X., D. P. Lettenmaier and E. F. Wood, 1996: One-dimensional Statistical Dynamic
Representation of Subgrid Spatial Variability of Precipitation in the Two-Layer
Variable Infiltration Capacity Model. J. Geophys. Res., 101(D16), 21403–21422.
36

_______, D. P. Lettenmaier, E. F. Wood and S. J. Burges, 1994: A Simple
Hydrologically Based Model of Land Surface Water and Energy Fluxes for GCMs. J.
Geophys. Res., 99(D7), 14415–14428.
_______, E. F. Wood and D. P. Lettenmaier, 1999: Modeling ground heat flux in land
surface parameterization schemes. J. Geophys. Res., 104(D8), 9581–9600.
Maurer, E. P., G. M. O’Donnell, D. P. Lettenmaier, and J. O. Roads, 2001: Evaluation of
the Land Surface Water Budget in NCEP/NCAR and NCEP/DOE Reanalysis using an
Off-line Hydrologic Model. J. Geophyis. Res., 106(D16), 17841–17862.
_______, A. Wood, D. P. Lettenmaier, and B. Nijssen, 2002: A Long-Term
Hydrologically-Based Data Set of Land Surface Fluxes and States for the Conterminous
United States. J. Climate, 15(22), 3237–3251.
Maybeck, P. S., 1979: Stochastic Models, Estimation and Control, volume 1. Academic
Press Inc., New York.
McLaughlin, D. B., 2002: An Integrated Approach to Hydrologic Data Assimilation:
Interpolation, Smoothing, and Filtering. Advances in Water Resources, 25, 1275–1286.
37

_______, and E. F. Wood, 1988: A Distributed Parameter Approach for Evaluating the
Accuracy of Groundwater Model Predictions: 1. Theory, Water Resources Res., 24(7),
1037-1047
Nijssen, Bart, Greg M. O'Donnell, Dennis P. Lettenmaier, Dag Lohmann, Eric F. Wood,
2001: Predicting the Discharge of Global Rivers. Journal of Climate. 14(15), 3307–
3323.
Pan, M., 2004: Generation of Ensembles of Spatial Hydrologic Fields, Eos Trans. AGU,
85(47), Fall Meet. Suppl., Abstract H23C-1142.
Peters-Lidard, C.D., E. Blackburn, X. Liang, and E.F. Wood, "The effect of soil thermal
conductivity parameterization on surface energy fluxes and temperatures," Journal of
Atmospheric Sciences, Vol. 55, No. 7, 1209-1224, 1998.
Reichle, R. H., D. B. McLaughlin, and D. Entekhabi, 2001: Variational Data
Assimilation of Microwave Radiobrightness Observations for Land Surface Hydrology
Applications. IEEE Trans. Geosci. and Remote Sensing, 39(8), 1708–1718.
_______, D. B. McLaughlin and D. Entekhabi, 2002: Hydrologic Data Assimilation with
the Ensemble Kalman Filter. Mon. Wea. Rev., 130, 103–114.
Roads, J., R. Lawford, E. Bainto, E. Berbery, S. Chen, B. Fekete, K. Gallo, A. Grundstein,
W. Higgins, M. Kanamitsu, W. Krajewski1, V. Lakshmi, D. Leathers, D. Lettenmaier,
38

L. Luo, E. Maurer, T. Meyers, D. Miller, K. Mitchell, T. Mote, R. Pinker, T. Reichler,
D. Robinson, A. Robock, J. Smith, G. Srinivasan, K. Verdin, K. Vinnikov, T. Vonder
Haar, C. Vorosmarty, S. Williams, E. Yarosh, 2003: GCIP Water and Energy Budget
Synthesis (WEBS). J. Geophys. Res., 108 (D16), 10.1029/2002JD002583.
Rodriguez-Iturbe, I. and J. Mejia. 1974. Design of rainfall networks in time and space.
Water Resources Research, 10 (4): 713-728 1974.
Ropeleski, C. F. and E. S. Yarosh, 1998: The Observed Mean Annual Cycle of Moisture
Budgets over the Central United States (1973-92). J. Climate, 11, 2180–2190.
Simon, D., and T. L. Chia, 2002: Kalman Filtering with State Equality Constraints. IEEE
Trans. Aerospace and Electronic Systems, 38(1), 128–136.
Sorenson, H. W., 1966: Kalman Filtering Techniques, in C. T. Leondes, Editor, Advances
in Control Systems Theory and Applications, Volume 3, page 219–292, Academic Press
Inc.
Wallis, James R, Dennis P Lettenmaier and Eric F Wood, 1991. A Daily Hydro-
Climatological Data Set for the Continental U.S., Water Resources Research, 27(7),
1657-1664, 1991
39

Wood, E. F., and I. Rodriguez-Iturbe, 1975: A Bayesian Approach to Analyzing
Uncertainty Among Flood Frequency Models, Water Resources Res., 11(6), 1975.
Ziegler, A. D., J. Sheffield, E. P. Maurer, B. Nijssen, E. F. Wood, and D. P. Lettenmaier,
2003: Detection of Intensification in Global- and Continental-Scale Hydrological
Cycles: Temporal Scale of Evaluation. J. Climate, 16, 535–547.
40

TABLE CAPTIONS
TAB. 1. Prescribed uncertainties in observations; prior and posterior uncertainties in
unconstrained and constrained assimilation experiments, in terms of averaged root mean
squared spread across ensemble members. Units are mm/day for fluxes and mm for soil
moistures.
41

TABLES
TAB. 1. Prescribed uncertainties in observations; prior and posterior uncertainties in
unconstrained and constrained assimilation experiments, in terms of averaged root mean
squared spread across ensemble members. Units are mm/day for fluxes and mm for soil
moistures.
Unconstrained Constrained Variables Observations (prescribed) Prior Posterior Prior Posterior
p 0.97 0.97 - 0.97 0.96 e 0.70 0.29 0.27 0.29 0.26 q 0.25 0.06 0.05 0.06 0.04 s1 3 1.10 1.02 1.08 0.97 s2 12 2.88 2.65 2.85 2.59 s3 - 14.11 13.96 16.17 16.53
42

FIGURE CAPTIONS
FIG. 1. Study area, VIC modeling grid, ARM-CART, Oklahoma Mesonet stations, and
USGS-gauged basins
FIG. 2. Monthly averaged soil moisture from the VIC-model and from Oklahoma
Mesonet measurement.
FIG. 3. Water budget analysis based on interpolated in-situ observations.
FIG. 4. Water budget analysis from VIC land surface model simulations.
FIG. 5. Water budget analysis from the unconstrained VIC-EnKF assimilation.
Assimilated data are grid-averaged OK Mesonet soil moisture, ARM-CART EBBR
evaporation and USGS runoff.
FIG. 6. Water budget analysis from the Constrained Ensemble Kalman Filter (CEnKF).
FIG. 7. Comparisons of the water budget components among the assimilation
experiments, and with observations.
FIG. 8. Autocorrelation function of innovation time series from the EnKF and the CEnKF
for the grid cell at latitude 34.75°, longitude -97.75°.
43

FIGURES
FIG. 1. Study area, VIC modeling grid, ARM-CART, Oklahoma Mesonet stations,
and USGS-gauged basins.
44

FIG. 2. Monthly averaged soil moisture from the VIC-model and from Oklahoma
Mesonet measurement.
45

FIG. 3. Water budget analysis based on interpolated in-situ observations.
46

FIG. 4. Water budget analysis from VIC land surface model simulations.
47

FIG. 5. Water budget analysis from the unconstrained VIC-EnKF assimilation.
Assimilated data are grid-averaged OK Mesonet soil moisture, ARM-CART EBBR
evaporation and USGS runoff.
48

FIG. 6. Water budget analysis from the Constrained Ensemble Kalman Filter (CEnKF).
49

FIG. 7. Comparisons of the water budget components among the assimilation
experiments, and with observations.
50

FIG. 8. Autocorrelation function of innovation time series from the EnKF and the CEnKF
for the grid cell at latitude 34.75°, longitude -97.75°.
51