![S A OPE 19 U A E 19 OPE 196 T · 2020-03-09 · A I SP L A S A U A E OPE 9HQH]XHOD OPE OPE OPE T T T A I IR I SP L A N U A E S A 196 191 199 196 2000 196 19 196 200 19 OPE 196 P E](https://static.fdocuments.in/doc/165x107/5eb193773ed8566dce459833/s-a-ope-19-u-a-e-19-ope-196-t-2020-03-09-a-i-sp-l-a-s-a-u-a-e-ope-9hqhxhod-ope.jpg)
R E H OPE Muscle Rehabilitation Device Standalone Physical Therapy Device.
32
REHOPE Muscle Rehabilitation Device Standalone Physical Therapy Device
-
Upload
bethanie-tucker -
Category
Documents
-
view
216 -
download
0
Transcript of R E H OPE Muscle Rehabilitation Device Standalone Physical Therapy Device.

REHOPEMuscle Rehabilitation DeviceStandalone Physical Therapy Device

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical Circuit Range of Motion Modes Future Work

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical Circuit Range of Motion Modes Future Work

ORTHOPEDICS

PROBLEM DEFINITION

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical Circuit Range of Motion Modes Future Work

SYSTEM DESCRIPTION

AGENDA
Problem Definition System Description Prototyping Mechanical Design The Material Motors Electrical Circuit Range of Motion Modes Future Work

PROTOTYPING
Market Survey
Product Planning
Identifying Opportunities
Evaluating and
Prioritizing Projects

PRODUCT PLANNING

IDENTIFYING OPPORTUNITIES

EVALUATING AND PRIORITIZING PROJECTS

MARKET PLAN
Competitive Strategy
Market Segmentation
Product Platform Planning

COMPETITIVE STRATEGY

MARKET SEGMENTATION
Hospiatals
Private clinics
Specialized centers
Home Use

PRODUCT PLATFORM PLANNING

AGENDA
Problem Definition System Description PrototypingMechanical Design Electrical Circuit Range of Motion Modes Future Work

MECHANICAL DESIGN

DESIGN BASIC IDEA

CALCULATIONS
m1 : mass of the thigh m2 : mass of the leg m3 : mass of the foot Mk: mass of knee motor

THE DESIGNPARTS

ALL PARTS

AGENDA
Problem Definition System Description Prototyping Mechanical DesignElectrical Circuit Range of Motion Modes Future Work
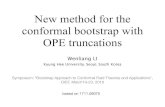
PIC16F877A VS. C8051F020 KIT

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical CircuitRange of Motion Modes Future Work

NORMAL RANGE OF MOTION (ROM)
Knee Flexion 130º Extension
120º
Hip Flexion 135º Extension
115º

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical Circuit Range of Motion Modes Future Work

MODES
Mode 1Move of hip motor only
Mode 2Move of knee motor only
Mode 3Move of hip motor & knee
motor
Mode 4Move the motors manually

AGENDA
Problem Definition System Description Prototyping Mechanical Design Electrical Circuit Range of Motion ModesFuture Work

FUTURE WORK
Muscle
Angle Sensor+ EMG
Signal ProcessingStimualtion
Motor


For more information
Facebook: fb.me/ReHopeProject
Twitter : @ReHope1
Phone: +2-011-1033-4424
E-mail: [email protected]