Ppt on speech processing by ranbeer
13
Ranbeer Tyagi
-
Upload
ranbeer-tyagi -
Category
Engineering
-
view
143 -
download
0
Transcript of Ppt on speech processing by ranbeer

Ranbeer Tyagi

The term estimator or filter is commonly used to refer to system that is designed to extract information about a prescribed quantity of interest from noisy data. With such a broad aim, estimation theory finds application in many diverse fields: communication, radar among others
Two major kinds of impairments:1. Inter symbol interference. 2. Noise

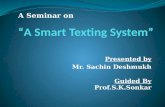
Fig.1 Block diagram of a communication system
Digital source of information
Transmitter
Channel ReceiverUserOfinformation
Messagesignal
Transmittedsignal
Receivedsignal

The ability of an adaptive filter to operate satisfactorily in an unknown environment and track time variation of input statistics makes the adaptive filter a powerful device for signal processing and control applications.
There are four application of adaptive 1. System identification2. Inverse Modeling 3. Prediction 4. Interference Cancellation

Parameters◦ u=input of adaptive filter=input to plant◦ y=output of adaptive filter◦ d=desired response=output of plant◦ e=d-y=estimation error
Systeminput
Plant Systemoutput
Adaptive filter
- y
+
u
e

The term speech processing basically refers to the scientific discipline concerning the analysis and processing of speech signals in order to achieve the best benefit in various practical scenarios . The field of speech processing is, at present, under going a rapid growth in terms of both performance and applications. This is stimulated by the advances being made in the field of microelectronics, computation and algorithm design

three engineering applications:
1. • Speech Coding and transmission that is mainly concerned with man-to man voice communication;
2. • Speech Synthesis which deals with machine-to-man communications;
3. • Speech Recognition relating to man-to machine communication.

Kalman filters are widely used in speech enhancement and much theoretical work has been done analyzing Kalman filters. The Kalman filter is the minimum mean-square estimator of the state of a linear dynamical system and can be used to derive many types of RLS filters. Extended Kalman filters can be expanded to handle nonlinear models through a linearization process.
Kalman filters have the advantages that they are:◦ more robust (stationarity not assumed)◦ require only the previous estimate for the next
estimation (versus all passed values for instance) ◦ computationally efficient

It is only a tool It is a computer program It is a complete statistical
characterization of an estimation problem
In a limited context, it is a learning method

Filter algorithm is implementable on a digital computer
Stationary properties of the Kalman filter are not required
Compatible with state-space formulation of optimal controllers for dynamic systems
Requires less additional mathematical preparation

Kalmanfilter
InputSpeechsamples
ConstructOutputspeech
Initialize
End
start
Yes end of iteration No

MatLab : Matrix Laboratory Numerical Computations with matrices
Every number can be represented as matrix
Why Matlab? User Friendly (GUI) Easy to work with Powerful tools for complex mathematics
Matlab has extensive demo and tutorials to learn by yourself◦Use help command

To enter a matrix2 5 36 4 1
>> A = [2 5 3; 6 4 1] >> B = [1:1.5:6; 2 3 4 5]>> for i=1:4 for j=1:3 C(i,j)=i*j; end end >> D =[]; D=[D;5]; D=[D;6;7] >> E = zeros(4, 5)