
Part 5 - univesointegration.com · of robot using embedded MICOM, 3-axis motor, ... • Serial...
38
Part 5
Transcript of Part 5 - univesointegration.com · of robot using embedded MICOM, 3-axis motor, ... • Serial...

Part 5

Intelligent Robot/Automation
ED-7270 _ INTELLIGENT EDUCATION ROBOT PLATFORM NEW
ED-7275 _ OMNI-DIRECTIONAL MOBILE ROBOT NEW
ED-7273 _ INTELLIGENT ROBOT DEVELOPMENT KIT NEW
ED-7271 _ROBOT ASSEMBLY KIT TRAINER
ED-7255 _ 5-AXIS ARM ROBOT TRAINER NEW
ED-CIM _ COMPUTER-INTEGRATED MANUFACTURING TRAINER
ED-FMS1 _ FLEXIBLE MANUFACTURING SYSTEM
ED-ILC _ PC BASED CONTROL TRAINER
ED-4031 _ FACTORY AUTOMATION TRAINER
ED-9150 _ BLOCK MODULAR PRODUCTION SYSTEM
ED-9160 _MINI MPS(MODULAR PRODUCTION SYSTEM) NEW
ED-FPC _ FLUID PROCESS CONTROL TRAINER NEW
ED-GP2000 _GRAPHIC PANEL TRAINER
ED-7300 _ASSEMBLING ROBOT TRAINER
ED-VP6 _6-AXIS MULTI JOINT ROBOT TRAINER NEW
ED-HS4 _4-AXIS SCARA ROBOT TRAINER NEW
ED-XYZ _4-AXIS RECTANGULAR COORDINATES ROBOT TRAINER NEW
ED-DTR _ DESKTOP ROBOT TRAINER NEW
ED-7220C _ ARM ROBOT TRAINER
ED-5820 _ REFRIGERATION DEMONSTRATOR
ED-5840 _ AIR CONDITIONING DEMONSTRATOR

INTELLIGENT EDUCATION ROBOT PLATFORM ED-7270
1/3
_____
200 _ ED Co.,Ltd.
• Intelligent Robot
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
• Insight into the Intelligent Robot and step-by step practices• Various services through the functions of ZigBee and RFID Reader• Recognition of the robot’s position and direction• Various training contents using the dialogue language(programs)• Image processing by the Fan/Tilt USB Camera• Human-friendly design to interact with the human being• Ideal for the Ubiquitous and Home Network based experiments• Home security experiments on utilization of its unattended security function• Robot control API using Visual C++ and control functions By Visual Basic Scripter• Next Generation Cell(Lithium Lon) – compact size and increase in life time
> EXPERIMENTS
1ST STEP • Concept and definition of the Intelligent Robot• Structure and principle of the Intelligent Robot
2nd STEP• Principle and practice for the Intelligent Robot’s sensor• Voice recognition and image sensor• Programming through the dialogue-type language
3rd STEP• Operation of the Dialogue-based Robot• Ubiquitous environment based control• Autonomous movement and object recognition
4th STEP• Practice on movement along optimized routes• Practice on remote network control
New

INTELLIGENT EDUCATION ROBOT PLATFORM ED-7270
2/3
_____
www.ed.co.kr _ 201
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
» Motion Range : Pan axis : ±350˚Tilt axis : Up 40˚, Down 30˚
• ZigBee » Coordinator : 2.4/2.4835GHz
• RFID » Frequency : 13.56MHz» Protocol : ISO/IEC 14443 A/B Standards, MIFARE
PHYSICAL CHARACTERISTICS
• Dimension : 420(W) x 700(H) x 200(D)mm• Weight : 20kg
ACCESSORIES
• DC Power Supply(including Recharger Cable)• Robot Storage Case(Aluminum)• Flow Chart Software CD• Wireless Access Point
OPTIONS
• Voice Recognition Module• Voice Synthesis Module
> SPECIFICATIONS
• System» CPU : Intel Pentium 1.8GHz» Memory : 512MB» Wireless : IEEE802.11g(USB)
• Display » TFT-LCD : 256k Color, 7inch, Touch Screen» Dot Matrix : 16 x 32 Dot, 3Color(5letters in English)
• Motion» Motor : 4-Axis» Operation Mode : Closed Loop
• User Interface Port» USB : USB 2.0 A-Plug
• Sensor» Ultrasonic : 10cm to 4meter» IR Distance : 10cm to 80cm» Motion Detect : 119˚ x 98˚, 5meter Distance» Touch Sensor : 4 Point» Illuminance Sensor : 0~10 level output» Voice Recognition : Software engine(VoiceEZ v2.0)
(Option)» Voice Speech : Software Voice Speech(Option)
• Battery» Lithium Ion : 6S4P(Smart Battery System)
• Mechanism» Driving Type : 2-wheel differential
Capable of Controlling the Robot Without anAdvanced Language• The Interactive dialogues language allows self programming
and helps understand the relationship between the robot’svarious sensors and each of its operation parts by detectingproblems in operation
• The user can program the Application software based on URC(Ubiquitous Robotic Companion) which is a standard for theIntelligent Robot, and can apply the application program to allof ED’s Intelligent Robot
• A Flow chart based GUI environment for the robot’s operationwithout having to take basic courses on programminglanguage(Visual C++, Visual Basic, C++, C); Such programmingresult can be checked on Debug View in the GUI environment
• “Smart Update” to ensure use of a latest version of thedialogue based application program
INTELLIGENT EDUCATION ROBOT PLATFORM ED-7270
3/3
_____
202 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
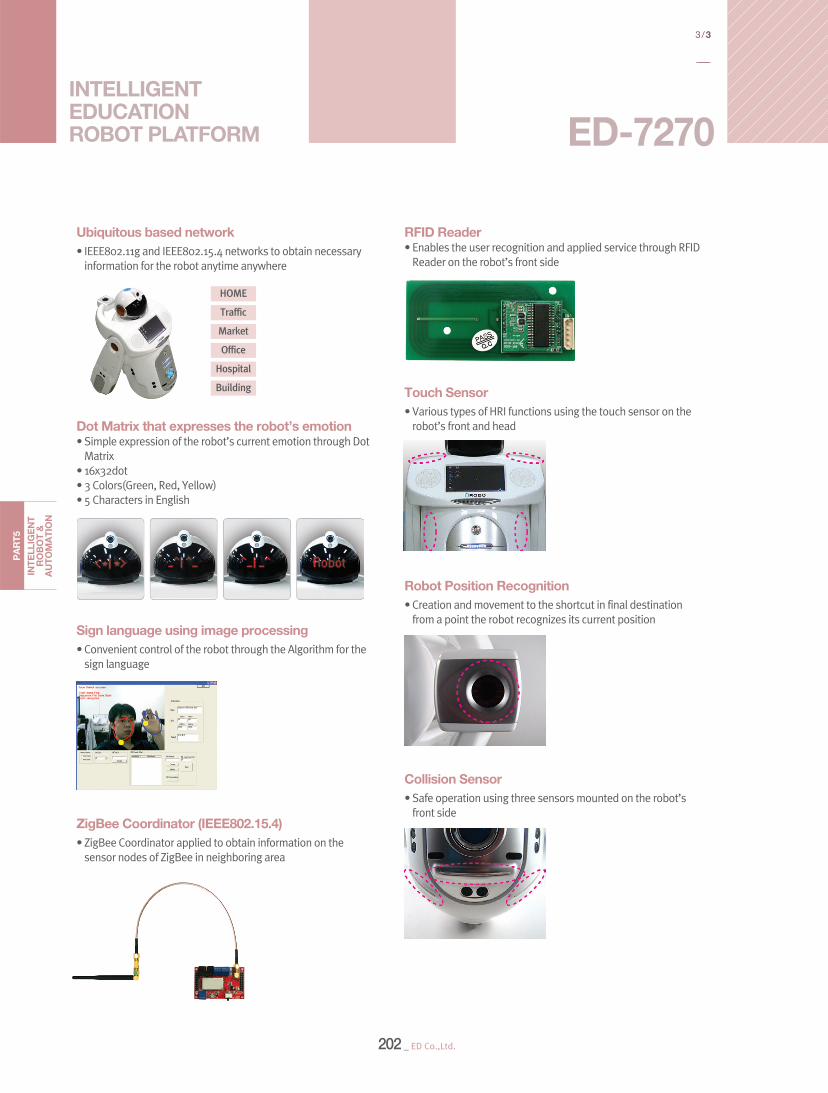
Ubiquitous based network• IEEE802.11g and IEEE802.15.4 networks to obtain necessary
information for the robot anytime anywhere
Dot Matrix that expresses the robot’s emotion• Simple expression of the robot’s current emotion through Dot
Matrix• 16x32dot• 3 Colors(Green, Red, Yellow)• 5 Characters in English
Sign language using image processing• Convenient control of the robot through the Algorithm for the
sign language
ZigBee Coordinator (IEEE802.15.4)• ZigBee Coordinator applied to obtain information on the
sensor nodes of ZigBee in neighboring area
HOME
Traffic
Market
Office
Hospital
Building
RFID Reader• Enables the user recognition and applied service through RFID
Reader on the robot’s front side
Touch Sensor• Various types of HRI functions using the touch sensor on the
robot’s front and head
Robot Position Recognition• Creation and movement to the shortcut in final destination
from a point the robot recognizes its current position
Collision Sensor• Safe operation using three sensors mounted on the robot’s
front side

OMNI-DIRECTIONAL MOBILE ROBOT ED-7275
1/2
_____
www.ed.co.kr _ 203
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• Omni-directional robot system• Microprocessor based control command as for simple use• Floor detecting sensor and forward area detecting distance sensor as mounted• Mountable expansion by adding the optional ultrasonic sensor and infrared sensor
> FEATURES
• Covers overall basic experiments for the mobile robot usinga floor detecting sensor and a front area detecting distancesensor
• Offers basic-to-advanced training curriculum on the controlof robot using embedded MICOM, 3-axis motor, IR sensor,PSD sensor and Omni-directional wheel
• Uniquely designed mechanism that has employed Omni-directional wheel with the interval in 120o for allowingdynamic movement in all directions
• Five IR sensors mounted to detect a specific color and sendthe data to Host CPU using interrupt
• Three PSD sensor mounted as basic shipped components,and capable of combining and mounting additional PSDsensor(2ea), human body detection sensor(1ea) and so on
• Provides related library source to help control the robotusing Application program(C language)
• Comes with user manual covering various types of sensoradopted for the intelligent robot
• Four buttons for controlling the robot's hardware and LCDfor viewing its status easily
• Downloadable through USB AVR ISP terminal• Smart battery system that allows to check the battery life
> BLOCK DIAGRAM
New
• Intelligent Robot

OMNI-DIRECTIONAL MOBILE ROBOT ED-7275
2/2
_____
204 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
> MAIN COMPONENTS
Display Panel
PSD Sensor Omni-directional Wheel
User I/O Panel IR Sensor
Battery
• Mechanical Part» Type of Mobility : Omni-directional» Wheels : 3ea» Robot's Appearance : Cylinder type» Robot's Size : Diameter : 255mm
Height : 200mm• Sensor Part
» Floor Detecting Sensor : IR Sensor : 5ea» Forward Area Detecting Sensor
〉PSD Sensor : 3ea (Front 0˚, ±30˚)〉Sensing Distance : 10~80cm
ACCESSORIES
• Smart Battery : 1ea• Battery Charger : 1ea• External DC Power Cable : 1ea• AC Cord : 1ea• Serial Cable : 1ea• USB Extension Cable : 1ea• USB AVR ISP : 1ea• Program CD(including Source) : 1copy• Experimental Manual : 1ea
OPTIONS
• Smart Battery Pack(4S/2P Lithium Polymer)• PSD Sensor• Ultrasonic Sensor• Human Body Detection Sensor• Aluminum Carrying Case
> SPECIFICATIONS
ROBOT SYSTEM
• Type of Mobility» Omni-directional
• Control Method» Embedded Micom Based Control
• Max. Linear Moving Speed» 50cm/s
CONTROL PART
• MCU» ATmega128
• Motor» Avaliable : Axis(Default 3Axis, External 3Axis)» Motor : DC Geared Motor» Operation Mode : Close Loop» Encoder : Optical Incremental Encoder(26Pulse/1Cycle)
• Battery» 4S/1P(Lithium Polymer)» Duration: 80 minutes or slightly longer» Motor impression voltage: below 12VDC
• I/O» LCD : Blue LCD, 2Line x 20 character» Button : 4ea(for input)» LED : Power LED : 1ea, User LED 2ea» Analog Input : 8point» Digital I/O : 8point

INTELLIGENT ROBOT DEVELOPMENT KIT ED-7273
1/2
_____
www.ed.co.kr _ 205
• Intelligent Robot
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• Obstacle avoidance and autonomous traveling using eight ultrasonic sensors• Various types of robot configuration by combining each module• Remote control by the controller• Precise operation by DC Servo Motor• Flow chart based programming software
> EXPERIMENTS
• Basic experiments using Visual C++• Basic control experiments
» DC Motor» RC Motor» Sensor (ultrasonic, infrared) control» Image sensor control
• Basic robot control practice » Image trace control » Map generation application» Autonomous driving application
• Battle System» IR transmission/reception» Damage Detection : LED (green, red)
• Adaptor» Constant Voltage : 15V, 8A
• OS» CPU : Intel Pentium 2GHz or over» Memory : 512MB or higher» Operating System : Windows XP
• Dimension» Size of Robot : ø380 x 260(H)mm, 10kg
> SPECIFICATIONS
STANDARD
• Motion Controller» Motor : 2 axis» Operation Mode : Closed Loop
• Mechanism» 2-Wheel Differential
• Battery» Lithium-Ion(2S1P), DC15V, 4A
• Sensor Parts» Ultrasonic : 10cm to 4meter» IR Distance : 10cm to 80cm» IR Reception(Remocon)
New

INTELLIGENT ROBOT DEVELOPMENT KIT ED-7273
2/2
_____
206 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
• Laser for IR(Transmission & Reception)• Navigation Module
ACCESSORIES
• Driver Tool Set : 1ea• Bolt Storage Box : 1ea• Infrared Remote Controlle r: 1ea• Carrying Case : 1ea• Software CD : 1ea• User Manual : 1ea
OPTIONS (AS RECOMMENDED)
• Pan/Tilt Camera» CMOS Camera : 1/4-inch CMOS color Image Sensor
Video Capture : 640 x 480 pixels30 frame Per SecondResolution : 330,000 pixel
» RC Motor : 3.3kg cm ToquePan/Tilt RC Motor
• Speech Synthesis• Voice Recognition• Battery(Additional)
» Lithium-Ion(2S1P), DC15V, 4A
• DC Servo Motor : The DC Geared Motor and IncrementalEncoder are positioned in the center and make it zero forthe rotational range when the robot rotates.
• Power Management : Not only manages the robot’s powerbut also supplies power to each controller and motor
• Battery: Composed of Smart Battery(Lithium Ion) anddesigned for mounting or dismounting with the maximumcapacity of 15V, 4A
• Sensor Controller : As a USB Type, it includes ultrasonic
sensor and infrared sensor, and delivers data of themonitored sensors to the host
• Motion Controller : As a USB type, it makes it possible forprecise measurement through the speed or position modeand the user can check the actual moving distance of therobot except its slip based on incremental encoder
• USB Hub : The sensor and motion controller are composedof USB in structure, and USB Hub enables controlling therobot directly by transmitting the data to host(PC)

• Intelligent Robot
ROBOT ASSEMBLY KIT TRAINER ED-7271
1/5
_____
www.ed.co.kr _ 207
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
> EXPERIMENTS
• Understanding of the Artificial Intelligence Robot• Classification of technologies applied to the Artificial
Intelligence Robot• Basic structure, mechanism and strength and weakness of the
robot• Principle and practice of the sensor modules
• Types and characteristics of the actuators(DC Servo Motor, StepMotor, RC Motor)
• Image processing experiments using the CCD ImageSensor(Digital Image Processing theory and pattern/colorrecognition principles and experiments)
• Applied experiments using the Intelligent Robot Kit
> CONFIGURATION
• Main Control Module(1 type) : Integrated Management For theArtificial Intelligence Robot
» Motor Module Controller(DC, Step, RC Motor) » Power Management for motor and sensor modules» PC Interface Management for Sensor Modules» USB 2.0 Hub(USB Camera, Reserve)
• Motor Module(3types) : Typical Motors For The Robot Design» DC Motor Module : Allows precise control by the application
of geared and Encoder. It can be used as the robot’s actuator» Step Motor Module : Well-known and applied to many robots
because of its simple control» RC Motor Module : Mainly used for the joint robot as it
features simple angle control
• 10 types of sensors, 3 types of motor modules and 4 types of application modules essential for the intelligent robot • System structure for seizing the essence of artificial intelligence robots• Enriched examples for the beginning level to an advanced level in the robot class• Easy to mount modules by the clamping device • USB high speed(480Mbps) interface • Extensive learning for the sensors being used in the field of Ubiquitous and Home Network • Image processing practice using USB Camera• Application experiment using MSRDS(Microsoft Robotics Developer Studio)
Intelligent Robot Demo Kit Program

ROBOT ASSEMBLY KIT TRAINER ED-7271
2/5
_____
208 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
• Interface : USB 2.0 High Speed(including USB 2.0 hub) • Support Function : DC Motor Control(2 Slot), RC Motor
Control, Step Motor Control, Serial Sensor Network(4 Slot)
• Operating Voltage : 12V/5A, 5V/3A • Certification : EMI/EMC with AC Power • Dimension : 166(W) x 86(H) x 248(D)mm
Main Control Module(1EA)
ED-7271-15
» Serial Sensor Network : RS-232 • OS Environment
» Windows : Windows 98, Me, 2000, XP
ACCESSORIES
• Flowchart Based Application Software(IRES) • OS Environment : Windows 2000, XP• Operation Manual : 1ea • USB Cable : 1ea • Timing Belt : 3ea• AC cord : 1ea• Image Target Panel : 6types• Dusty Cover : 1ea • Working Board : 800(W) x 610(H)mm
OPTIONS
• ED-7271-18 Touch & Bumper Sensor : 1ea• ED-7271-19 RFID Reader Module with 13.56MHz RFID Tag(2ea)
: 1set
> SPECIFICATIONS
• Motor» DC Servo Motor : 12V, 175rpm 30 : 1 » RC Servo Motor : 5V, 4.1kg·cm » Step Motor : 12V, 75Ω, 1.8 Step
• Sensor» Inclination : X-Y measurement ±45˚» Electronic Compass : 0~359.9˚ with 0.1˚ resolution » Voice Recognition : Max. 10 words(user define) » Voice Direction check : Four directions by LED Indicator » Pyroelectric Infrared : distance : 5meter, 119˚ x 38˚» Ultrasonic : Frequency : 40kHz
Detectable : 10cm to 4meter» Infrared Distance : 10cm to 80cm » Illumination : Max. brightness 100lx » Others : CCD Camera, Sound Sensor
• User Interface Port » USB : USB 2.0 B-plug
• Main Controller» Interface : USB 2.0 » Motion : DC Motor, RC Motor, PWM Control
• Sensor Module(10 types) : essential Sensors For TheArtificial Intelligence Robot
» Ultrasonic Sensor : Detects the distance of an obstacle» Infrared Distance Sensor : Detects the distance of an
obstacle» Inclination Sensor : Detects the gradient of the robot» Electronic Compass Sensor : Detects the robot’s current
moving direction» Pyroelectric Sensor : Judges the presence of a human» Illumination Sensor : Measures the light’s brightness » Image Sensor : Judges the predefined object and
measures its distance» Touch & Bumper Sensor : Detects the touch of human
being and objects
» RFID Reader Module : Application of recognition for RFIDTag
» Voice Recognition & Synthesis Module : Voicerecognition for Robot, out of Synthesis speech andapplication of detect the direction of sound
• Application Module(4types) : Support Modules For TheRobot Experiments
» Bi-Directional Driving Module : Support wheel modulewith tires for visual motor operation
» Slide Module : Support modules for Infrared DistanceSensor and Ultrasonic Sensor
» Light Source Module : Support module for IlluminationSensor(for brightness control)
» Panel Fixation Module : 3 types of auxiliary module forImage Processing Camera(circle, rectangle, triangle)

ROBOT ASSEMBLY KIT TRAINER ED-7271
3/5
_____
www.ed.co.kr _ 209
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• Reduction : 30 : 1 • Rated Torque : 1.5kg·cm• Rated Voltage : 12V• No Load speed : 170rpm • Incremental Encoder : 14 Pulse • Interface : 16-pin flat cable• Dimension : 60(W) x 82(H) x 106(D)mm
ED-7271-13 DC Motor Module :2EA
• Operation Voltage : 12V• Step Angle : 1.8 step• Resistance : 75Ω• Interface : 16-pin flat cable• Dimension : 60(W) x 82(H) x 103(D)mm
ED-7271-14 Step Motor Module :1EA
• Operation Voltage : 5V• Rated Torque : 4.1kg·cm• Interface : 16-pin flat cable• Dimension : 90(W) x 139(H) x 105(D)mm
ED-7271-10RC MotorModule(Pan/Tilt) : 1EA
Motor Module(3EA)
• Frequency : 40kHz• Test Range : 10cm to 4meter• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 74(W) x 82(H) x 60(D)mm
ED-7271-3Ultrasonic Sensor :1EA
• Light Sensor : Max. brightness 100lx• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 60(W) x 72(H) x 80(D)mm
ED-7271-1Illumination Sensor :1EA
Sensor Module(10EA)
• Test Range : 10cm to 80cm• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 74(W) x 82(H) x 60(D)mm
ED-7271-4Infrared DistanceSensor : 1EA

ROBOT ASSEMBLY KIT TRAINER ED-7271
4/5
_____
210 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
• Distance : 5m, 119˚ x 38˚• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 62(W) x 82(H) x 74(D)mm
ED-7271-7Pyroelectric Infrared :1EA
• Operating Voltage : 5V• Capacitive Sensing : 2 Point• Tape Switch : 1 Point• Interface : Serial Sensor Network(10Pin Plat Cable)• Dimension : 60(W) x 50(H) x 70(D)mm
ED-7271-18Touch & BumperSensor : 1EA(Option)
• CPU : S3C2440(400MHz)• Operation Voltage : 5V• MIC : ø6, Sensitivity(-33dB)• Speaker : Oval type(35 x 20mm), Rated Power(1W)• Interface : Serial Sensor Network(10Pin Plat Cable)• Voice Recognition : Speaker Independent, Max. 100
words(max.16 characters)• Voice Synthesis : Text to Speech, Max. 100 characters• Detect Voice Direction : Detection Ramge(1800),
Resolution(15˚)• Dimension : 70(W) x 48(H) x 140(D)mm
ED-7271-21Voice Recognition &Synthesis : 1EA
• Measurement : X, Y Axis ±45˚• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable) • Dimension : 60(W) x 87(H) x 70(D)mm
ED-7271-6Inclination Sensor :1EA
• Resolution : 0~359.9˚ with 0.1˚ resolution• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 95(W) x 46.6(H) x 105(D)mm
ED-7271-5Electronic Compass :1EA
• CPU : ATmega128• Operation Voltage : 5V• Frequency : 13.56MHz• TAG Protocol : ISO/IEC 14443 A/B Standards• Operation Range : Up to 3cm• Interface : Serial Sensor Network(10Pin Plat Cable)• Dimension : 80(W) x 51(H) x 105(D)mm
ED-7271-19RFID Reader Module :1EA(Option)

ROBOT ASSEMBLY KIT TRAINER ED-7271
5/5
_____
www.ed.co.kr _ 211
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• CCD Camera : ¼″Color VGA CMOS Image Sensor, 31kpixel, Angle 52 degree
• Image Processing : Capable of color recognition anddistance detection
• Target Panel : Circle, triangle, square, left, right, up• Operating Voltage : 5V• Interface : USB• Dimension : 80(W) x 40(H) x 105(D)mm
ED-7271-10Image Sensor
• Target Panel : Circle, triangle, square, left, right, up• Panel Dimension : 110(W) x 1(H) x 100(D)mm• Module Dimension : 80(W) x 40(H) x 105(D)mm
ED-7271-17Panel Fixation Module :1EA
• Driver Type : Bi-Directional• Gear Type : Straight Bevel Gear• Interface : Timing Pulley(ø65)• Dimension : 128(W) x 86(H) x 166(D)mm
ED-7271-16Bi-Directional Module : 1EA
• Output Range : 0~10 Level Light• Operating Voltage : 5V• Interface : Serial Sensor Network(10-pin flat cable)• Dimension : 60(W) x 72(H) x 92(D)mm
ED-7271-2Light Sensor : 1EA
• Measurement Range : 0 to 300mm• Dimension : 90(W) x 40(H) x 302(D)mm
ED-7271-11Slide Module : 1EA
Application Module (4EA)
• Program : Flow Chart Based Application S/W• OS Environment : Windows 2000, XP
ApplicationSoftware

5-AXIS ARM ROBOT TRAINER ED-7255
1/2
_____
• Consists of one gripper and 5-axis vertical multi joints• Absolute-type RVDT Position Sensor applied to each axis and requires no Limit switch• High performance CPU enables real-time control of each axis• PID gain tuning and real-time control • Emergency switch on the robot controller and teaching pendant• Control by USB and Ethernet interface• Expandible 2-axis and digital or analog I/O port• 3D graphic simulation and real-time connectivity with a real robot
> EXPERIMENTS• Introduction to the System
» Basic Configuration» Description of components» Overview of Program » Architecture» Installation
• Program Composition» Menu and Toolbar» View and Windows» Simulator and Screen control» Industrial language editor
• Arm Viewer and Robot Manipulation» How to use "3D Arm Viewer"» Manual mode for controlling the robot» Storage and utilization of the position data
• Programming» How to use Program Editor» Program syntax» Programming» Program execution and debugging
• Robot Simulation» Virtual simulation and robot manipulation methods
» Basic experiments 1» Basic experiments 2» Basic experiments 3
• Robot Control Basic Experiment» Position transfer methods» Velocity transfer methods» Position determination methods» How to use "Teach Pendant"
• Applications for Robot Manipulation» Accurate transfer through block repetitions» Grip and transfer for a certain object» Position transfer for a certain object» Repetitive operation and
simulation-linked transfer
> CONFIGURATION• Introduction to the System
» Basic Configuration» Description of components» Overview of Program » Architecture
• Intelligent Robot
212 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
New

www.ed.co.kr _ 213
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
5-AXIS ARM ROBOT TRAINER ED-7255
2/2
_____
ROBOT BODY
• Width : 280mm• Depth : 280mm• Height : Max. 786mm• Weight : 16kg• Operating Part
TEACH PENDANT
• Display : 20 x 2 Character LCD• Interface : USB 1.1• Key : 37 user key(Emergency switch included)
ROBOT CONTROLLER DIMENSION
• Width : 250mm• Depth : 309mm• Height : 88.1mm• Weight : 3.8kg
TEACH PENDANT DIMENSION
• Width : 138mm• Depth : 190mm• Height : 40mm• Weight : 0.55kg
SIMULATOR ENVIRONMENT
• CPU : Pentium IV 2GHz or higher• Memory : Above 512MB• Operating System : Windows XP• Graphic Card
» 3D accelerated graphic card
ACCESSORIES
• AC Power Cord• USB Cable• Controller Connection Cable• Teach Pendant Cable• RJ-45 Cable• Software and User Manual
Link Number Operating Range Link Length Weight
No. 0(Base) 0 80mm 5.9kg
No. 1 -175~+175˚ 107mm 3.4kg
No. 2 -30~+90˚ 230mm 3.3kg
No. 3 -0~+130˚ 230mm 1.9kg
No. 4 -90~+90˚ 0mm 0.6kg
No. 5 -170~+170˚ 0mm 0.05kg
No. 6(Gripper) 0 ~ 80mm 139mm 0.35kg(Rubber Pad)
> SPECIFICATIONS
ARM PROCESSOR
• CPU» 666MHz, Min : 1ea
• NAND FLASH» 128MByte : 1ea
• NOR FLASH» 1MByte : 1ea
• DRAM» 128MByte : 1ea
• DPRAM» 128k : 1ea
DSP PROCESSOR
• TMS320F2811» 150MHz : 1ea
• Motion Control» Closed loop operation : 1ea
• Avaliable motor 8-axis» CPLD : 1ea
• Avaliable PWM Generation» 8 axis : 1ea
• Absolute encoder counter» 8 channels : 1ea
DRIVER PACK
• Operating environment» 24V, 120W Max : 8ea
INTERFACE
• USB» USB 1.1 A-Type(Pendant) : 1ea» USB 2.0 B-Type(Host PC) : 1ea
• Ethernet» 10Base-T : 1ea
• RTC» Real Time Clock : 1ea
• State LED» Alarm, Start/stop : 3ea
• Character LCD» 20 x 2 : 1ea
• Digital Input» 0~24V : 8ea
• Digital output» 0~24V : 8ea
• Analog Input» 0~10V : 4ea
• Analog output» 0~10V : 4ea
• Relay Output» SC, OC : 4ea

214 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
COMPUTER-INTEGRATEDMANUFACTURING TRAINER ED-CIM
1/4
_____• Factory Automation
The Computer-Integrated Manufacturing System (ED-CIM) is an educational purpose, training system that demonstratesthe logistics system based system approach that is being used currently by industry. Th ED-CIM comes with powerful userfriendly software that integrates the Programmable Logic Controller (PLC) related control with the PC to offer real-timesystem monitoring. This feature allows users to set up experiments that use advanced control methods for controllingmechanical elements in the system.The ED-CIM course materials and experiments are designed to encourage student interested in current manufacturingsystems. Students will perform various activities that will guide students on how to set up, control, perform troubleshooting and adapt various command languages to control systems within the CIM. Students will gain a greaterunderstanding of how these systems are used in real world industrial applications.
> FEATURES• Computer-Integrated Manufacturing Training System under the
application of advanced control technology for real fieldexperiences
• Capable of “per unit” configuration into the two or moreprocesses, or entire processes for customized experiments bycombining each process
• Gives students an insight into the production mechanismthrough firsthand practices in disassembly and assembly ofhardware components
• Excellent “per process” configuration(Supply → Inspection →Fabrication →Classification →Robot →Assembly →Storage)
• Palette transport by conveyors which are the distributional basisof production system
• Transport and supply by an industrial robot in the robotprocessing
> TOPIC COVERAGE• Inlet Lifter : Up/Down Transfer Lifter, Pallet Supply• Supply Process : Material Provider, Material Transfer Rotating
Cylinder• Inspection Process : Inspection Device, 2nd Material Provider,
Material Transfer Rotating Cylinder• Fabrication Process : Small Drill Machine, Clamping Device,
Material Transfer Rotating Cylinder• Classification Process : Material Provider for dummy objects in
three types(white, blue and metallic) • Robot Process: 5-Axis/6-Axis Compound Joint Robot, Material
Detection Device • Assembly Process : Screw Driver System, Screw Feeder System, • Storage Process : X-Y Storage Crane, Classification Slide• Outlet Lifter : Up/Down Transfer Lifter

www.ed.co.kr _ 215
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
COMPUTER-INTEGRATEDMANUFACTURING TRAINER ED-CIM
2/4
_____
• CIM SYSTEM• Sensor Control Technology• Pneumatic Control Technology• Conveyor Control • Analog Sensor Control• Per Unit Process Control• PLC Programming
• Trouble Shooting and Main Transformer • Robot Control• Standalone or Integrated System Operation • HMI Software• PLC Network by Ethernet• Disassembly and Assembly • PC Integrated Control Methods
> EXPERIMENTS
> SPECIFICATIONS
HMI SYSTEM
• HMI Controller» Panel size 15″» Resolution 800 x 600 » Color TFT LCD» Touch operation» RS232/422/485, Ethernet, USB» 40GB HDD Type» OS : Windows 2000
• HMI Software» Unlimited Tags» Over 120 I/O devices as basic» Visual Basic Script» OS : Windows 95/98
Windows 2000/ME/XP
1. Inlet Lifter• Main Components
» Pallet up/down supplier» Forward/reverse conveyor» Material supply through the upper end
conveyor» Slave Input 16P » Slave Output 16P
• Experiment Topics» Structure of the material and pallet
supplier» Principle of the supply and distribution
process» Experiments on basic electro pneumatic
operation » Forward/reverse operation of the DC
motor
PERUNIT EXPERIMENTS
2. Supply Process• Main Components
» Material Provider» Rotating cylinder for material supply» Transfer Unit designed for the vacuum
absorption» Upper/lower end conveyor» Slave Input 16P» Slave Output 16P
• Experiment Topics» Mechanical understanding of the
material supply » Uses and characteristics of various
detection sensors» Application of pneumatic devices in
rotating movement» Transfer experiments using the Vacuum
Generator and Absorber » Basic control in liaison with the
conveyor

216 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
COMPUTER-INTEGRATEDMANUFACTURING TRAINER ED-CIM
3/4
_____
5. Classification Process
3. Inspection Process• Main Components
» Inspection Lifter»Rotating Cylinder for the goods to be
inspected»Transfer unit designed for vacuum
absorption»Linear potentiometer for thickness »Upper/lower end conveyor»Slave Input 16P»Slave Output 16P»Slave Analog/Digital
• Experiment Topics» Mechanical understanding of the
material inspection» Uses and characteristics of various
detection sensors» Application of pneumatic devices in
rotating movement» Transfer experiments using the Vacuum
Generator and Absorber » Treatment and application of the
analog data
4. Fabrication Process• Main Components
» Rotation cylinder to transfer thefabricated goods
» Transfer unit designed for vacuumabsorption
» Clamping device» Drill device» Upper/lower end conveyor» Slave Input 16P» Slave Output 16P
• Experiment Topics» Mechanical understanding of the
material fabrication» Uses and characteristics of various
detection sensors» Application of pneumatic devices in
rotating movement» Transfer experiments using the Vacuum
Generator and Absorber » Basic control in liaison with the
conveyor
• Main Components» Material classification provider for the
dummy dbjects in three types: white,blue and metallic
» Classification process by originalmaterial’s quality
» Upper/lower end conveyor» Slave Input 16P» Slave Output 16P
• Experiment Topics» Mechanical understanding of the
material classification» Uses and characteristics of various
detection sensors» Material classification by the detection
of conditions
6. Robot Process• Main Components
» 5(6)-Axis compound joint robot» Upper/lower end conveyor» Slave Input 16P» Slave Output 16P
• Experiment Topics» Configuration of the robot’s teaching
point» Programing for operation» Real-time motion monitoring» Automatic operation in liaison with the
controller» Material supply and transfer
experiments

www.ed.co.kr _ 217
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
COMPUTER-INTEGRATEDMANUFACTURING TRAINER ED-CIM
4/4
_____
COMPUTER-INTEGRATEDMANUFACTURING TRAINER
7. Assembly Process• Main Components
» Screw driver» Screw transfer » Screw feeder» Clamping device» Upper/lower end conveyor » Slave Input 16P» Slave Output 16P
• Experiment Topics» Mechanical understanding of the
material assembly» Operation of Vibration Feeder» Uses and characteristics of various
detection sensors» Application of the pneumatic devices in
rotating movement» Transfer experiments using the Vacuum
Generator and Absorber
8. Storage Process• Main Components
» 1-axis cartesian robot for storage» Classification slide for finished goods» Upper/lower end conveyor » Slave Input 16P» Slave Output 16P
• Experiment Topics» Configuration of the robot’s teaching
point» Programing for the robot’s motion» Automatic operation in liaison with the
controller» Storing experiments in liaison with the
conveyor
9. Outlet Lifter• Main Components
» Forward/reverse conveyor» Material resupply through the lower
end conveyor» Slave Input 16P» Slave Output 16P
• Experiment Topics» Structure of the material and pallet
supplier» Principle of the Pallet’s return process» Experiments on basic electro pneumatic
operation » Forward/reverse operation of the DC
motor

218 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
FLEXIBLE MANUFACTURING SYSTEM ED-FMS1
1/1
_____• Factory Automation
ED-FMS installed at the system control department of Chungnam Vocational Junior College
» Supply of raw materials» Pallet tool
Supply Process
» Stores at the cell designated by crane» Stores according to color and materials» Selecting and taking at the time of cell is full
Storing Process
» Telling the colors» Providing the cover of same color and materials» Providing the screws and fixing
Classifying and Assembling Process
» Measures the thickness ofraw materials
» Re-supply after eliminatingthe defective materials
Inspection Process
» Drill processing» Tap processing» Eliminating chip
Processing Process
Monitoring and control screen for FMSwhole process
Monitoring and control screen for FMSinspection process
Monitoring and control screen for FMSprocessing process
> SPECIFICATIONS
SYSTEM CONFIGURATION
• Supply Process» Pallet supplier
(size of pallet : 200(W) x 10(H) x 200(D)mm» PTP robot(place to place robot)» Material supplier and magazine
• Inspection Process» Dimension measuring meter(measuring the thickness)» Load’g/unload’g rotative cylinder» Small conveyor» Loadless cylinder(load’s device) and gripper» 2nd material supplier and magazine
• Processing Process» 180˚ rotative arm cylinder» Gripping device» Drilling processor
» Device of eliminating the chip» Tap processor» Transmitting slide» Classifying and assembling process» 180˚ rotative arm cylinder» 4 dividing indexing table» Separator» Rotative cylinder, parts supplier and magazine(3set)» Screw Fastener and Screw Supplier
• Storing Process» Rotative cylinder(Vacuum type)» Automatic warehouse loader» Storing cell(3 x 4)» Conveyor for releasing the finished products» Main Conveyor

www.ed.co.kr _ 219
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
PC BASED CONTROLTRAINER ED-ILC
1/1
_____• Factory Automation
• Advanced open structure control system• IEC61131-3 compliant editors• Real-time operation on Windows 2000, NT and XP• DCOM based dispersion processing• Integrated SuiteLink & OPC Server• Open structure multiple I/O interface
> SPECIFICATIONS
CONTROL SOFTWARE
• NT Base» Microsoft Windows NT as PC Operating System in
utilization of real-time function and expansioncharacteristics
» Dispersed control through DCOM together with a built-in, peer-to-peer communication function in the software
• Open Structure» Can be used under all types of platform that supports
Microsoft Windows NT• PID Factory Object
» Powerful PID functions including Loop simulation» I/O function» Supports the I/O Interface originally developed for Open
Device Network Interface
• Online Function» Various types of online monitoring/editing functions» Indication of Processing Status, Compulsion I/O, Online
Editing, Activated Logic Display, Debugging• International Standard
» Open Device Network Interface, OMAC, IEC1131-3 » Improved style ST Text Editor» Individual scripts can be written by the new ST Editor
with an improved function of SFC Editor • Runtime Engine
» Retrieves an application program written in C++, VisualBasic or Java on the Runtime Engine
• Simulation» Simulation of real processes for optimizing and
debugging the application program
Architecture Composition
RTE
Development
DCOM Communication
I/O

FACTORY AUTOMATION TRAINER ED-4031
1/3
_____
220 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N• Factory Automation
• Comprehension of basic production automation processes such as transfer, fabrication, classification, inspection and storage
• Convenient wiring and pipe arrangement with a label of each component such as sensors and actuators• PLC training system function(various types of sequence actions through a change in PLC control program• Counter/timer function and motor control by PLC or without PLC(electrical method)• Aluminum profile worktable & control modules for easy mounting
> EXPERIMENTS• Configuration elements of factory automation system• Characteristics and principles of the object detection sensor• PLC(Programmable Logic Controller) control programming• Main processes of factory automation system(supply,
fabrication, classification, storage)
• Methods of DC motor control(speed, direction)• Mechanical structure and assembly for the factory automation
system• Utilization of the optional PLC simulation software(EDS-SimPL)
> SPECIFICATIONS
• Aluminum profile working board for durability • 4mm sockets for wiring convenience• Convenient piping practices with one-touch fitting in
use• Easy to control by the cylinders with Speed Control
Valve and Reed Switch mounted • DC24V ensuring safety
Main Structure
Configuration

www.ed.co.kr _ 221
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
FACTORY AUTOMATION TRAINER ED-4031
2/3
_____
• Indication of the Main Structure’s operation in realtime
• Block diagram for better understanding andconvenience
• Modular structure for mounting or dismountingmodules on the rack easily
• Easy to change the module’s position with cables
OP-4031Operating Panel
• Programmable Logic Controller under the IEC standard• Built-in power supply for the I/O connection• Motor Speed Controller and Speed Indicator as
mounted• Switches mounted for additional functions• Easy to wire and connect Programmable Logic
Controller• Standard PLC unit : GLOFA GM6
PL-4031PLC Control Panel
> SPECIFICATIONS
MATERIALS SUPPLY UNIT
• Magazine» Shape : A tower that can store eight pieces of ø40
dummy object » Material : Aluminum
• Cylinder» Double Acting Cylinder(Diameter : ø16, Stroke: 75mm)
• Sensor» Reed Switch(for detecting the position of cylinder) : 2ea» Optical Fiber Sensor(for detecting absence of the
materials) : 2ea• Others
» Flow Control Valve(for speed control): 1ea» One-touch fitting mounted
FABRICATION UNIT
• Electrical Drill» DC 12~24V, 1300rpm, 3.5W
• Cylinder» Double Acting(Rodless) Cylinder» Diameter : ø16, Stroke: 50mm
• Red Switch» 10~30V, a contact, built-in LED : 2ea
• Flow Control Valve» One touch fitting, speed control 2ea
TRANSFER & LOADING UNIT
• Double Acting Cylinder» Diameter: ø16, Stroke : 80mm
• Reed Switch : 10~30V, a contact, built-in LED : 2ea• Flow Control Valve
» One touch fitting, speed control : 2ea » Ejection of the defective object
CONVEYOR UNIT
• Double Acting Cylinder» Dimension : 600(W) x 100(H) x 50(D)mm» Polyurethane 1.4t, belt type
• Motor » DC 24V geared motor, 1600rpm» Speed Control : 1~15m/min» Connection by using Pulley, deceleration ratio(40 : 1)
• Encoder» Pulse generation for speed indication
GENERAL CHARACTERISTICS
• Input Voltage : AC 220V, 60Hz• Temperature : 0~45˚C, Below RH 85%• Dimension
» Table type : 1100(W) x 1050(H) x 750(D)mm» Rack type : 1100(W) x 1300(H) x 750(D)mm
• Work Board : Aluminum Profile type, Groove Space : 25mm
MAIN STRUCTURE

FACTORY AUTOMATION TRAINER ED-4031
3/3
_____
222 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
OPERATING PANEL
• Dimension : 340(W) x 125(H) x 296(D)mm• Materials
» Front Panel : Aluminum» Outer Case: Coated steel
• Characteristics» Module type for mounting / dismounting» Main Structure/Controller’s status indication» Connector for PLC control panel: 25pin x 2
• Others» Power Terminal: +(3ea), -(3ea)
PLC CONTROL PANEL
• Dimension : 340(W) x 125(H) x 296(D)mm• Materials
» Front Panel: Aluminum , Box: Coated steel• Characteristics
» Module type for mounting / dismounting, built-in powersupply
• PLC» Standard: GLOFA GM6» Options: GLOFA GM4 or other types of PLC (in case of
replacing GLOFA GM6)• Motor Control
» Speed control switch, motor output terminal» Encoder input terminal, speed indicator
• Others» OP Connector: 25pin x 2» Power terminal: + (3ea), - (3ea)
SOLENOID VALVE MODULE
• Double Acting Solenoid Valve» DC 24V, LED mounted type: 1ea» Applicable pressure 2.5~8bar
• Single Acting Solenoid Valve» DC 24V, LED mounted type: 3ea» Applicable pressure 2.5~8bar
SENSOR MODULE
• Optical Fiber Sensor» ø18, 10~30V DC, sensing distance of 100mm
• Inductive Sensor» ø18, 10~30V DC, sensing distance of 4mm
• Capacitive Sensor» ø18, 10~30V DC, sensing distance of 10mm
ACCESSORIES
• Patch Cord (ø4 plug): 1set• AC Power Cord: 1ea• 25pin Cable: 2ea• Pneumatic Hose (10 meter): 1set• User Manual: 1ea
OPTIONS
• Simulation Software for Programmable Logic Controller(EDS-SimPL)
KEY COMPONENTS

www.ed.co.kr _ 223
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
BLOCK MODULARPRODUCTION SYSTEM ED-9150
1/1
_____• Factory Automation
• Small size type suitable for traning on automation system’s installation and operation• Mechanism and installation methods through assembly and disassembly per process• Enhancement of application programming techniques through PLC control
> EXPERIMENTS
• Supply Process(Basic Course)
» Principles of materials supply usingtube cylinder
» Transport to a next process aftermaterials supply
• Inspection & Logistics Process(Application Course)
» Utilization of various sensors » Utilization of the measurement
inspection device» Utilization of the magnet » Utilization of the logistics conveyor
• Production & Storage Process(Application Course)
» Transport of indexing table» Drill production system’s mechanism » Hole inspection of the product» Storage-by-classification methods in
relation to product’s condition
> SPECIFICATIONS
• Distribution Process» Raw Material type : ø39 Plastic(white), AL, per depth
(total 6)» Magazine : Raw material 8 loaded(ø40 x 160mm)» Distribution Type : Vacuum rotary cylinder type
• Inspection Process» Inspection Function : Quality, Depth, and so on» Using Sensor : Inductive sensor, analog sensor(Linearity±1%,0.6W)
» Transfer Way : Load less cylinder(ø16 x 200mm),Beltconveyor(45mm x 250mm)
• Production Process» Production Parts Transfer : Index table(divided by 4 as
Geneva type)» Producing Drill Machine : 5 available(DC24V 20W)» Producing Inspection : ø10 x 30mm cylinder
• Storage process» Storage Cell : Load available on quality» Transfer Unit : Rotary cylinder
» Magazine Size : ø40 x 160mm(2set)» Transfer Type : Slide cylinder
• Control Panel» PLC I/O Point : 32-Input 32-Output» A/D Converter Module
• Dimension and Weight» Main System : 1160(W) x 700(H) x 720(D)mm» Control Panel : 582(W) x 1200(H) x 250(D)mm(including
Base Board)
ACCESSORIES
• AC Power Cord : 1ea• Patch Cord : 1ea• Training Materials : Nonmetal 6ea, Metal 6ea• User’s Manual : 1ea
OPTIONS
• Simulation Software Programmable Logic Controller(EDS-SimPL)
• Program CD : 1ea • Piping Hose : 1set• Drill Blade : 1ea • RS232C Cable : 1ea

224 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
MINI MPS (MODULAR PRODUCTION SYSTEM) ED-9160
1/1
_____• Factory Automation
• Organization of various control elements in complexity for applied technology • Total of 6 processes comprising supply, Sensor, Stopper, Absorption & Transfer, Conveyor and Loading• Built-in control elements covering mechanics, electricity, and electronics• Control circuit for simple and high speed data transmission in the USB type
> SPECIFICATIONS
• Supply Part» Magazine #1 / #2 : 2ea / 2ea» Cylinder : 1ea» Optical Fiber Sensor : 1ea
• Sensor Part» Inductive Sensor : 1ea» Capacitive Sensor : 1ea» Sensor Bracket 1ea
• Stopper Part» Linear Bush : 1ea» Stopper Cylinder : 1ea(Bracket 1ea)» Stopper : 1ea» Shaft : ø6 x 51L 1ea
• Absorption & Transfer Part» Linear Bush : 1ea» Cylinder : 2ea(Bracket 1ea)» Vacuum Pad : ø20 1ea
• Conveyor Part» Moto : 24V 1/300 1ea» Round Belt Pulley : ø25 x 10T 2ea» Round Belt : ø4 x 75L 1ea
• Loading Part» Transfer Plate : 48 x 28 x 8T 1ea» Storage Box : 179 x 58 1ea» Limit Switch : 3ea
» Sensor : 19 x 18 x 3T 1ea» Cam : ø28 x 1.2T 1ea» Motor : DC 24V - 1/80 1ea» Photo Sensor : 1ea» Coupling : 1ea» Linear Bush : 1ea
CONTROL UNIT
• USB Interface Unit : 1ea• FND Control Unit : 1ea• Stepping Motor Control Unit : 1ea• LED Control Unit : 1ea• M-IFUT-8255 Unit : 1ea• Input Control Unit : 1ea• DC Motor Control Unit : 1ea• TR Control Unit : 1ea• ATMega128 Control Unit : 1ea• Photo Coupler Control Unit : 1ea
ACCESSORIES
• AC Power Cord : 1ea• Circuit Connection Cable : 1set• User Manual : 1ea
> EXPERIMENTS• Principle of parts control and element supply movement
principle• Work detection using various sensors and sensor characteristic
control
• Principle of the training Kit’s apparatus and application• Operation of control elements using pneumatic components
and electrical motor• Control of the USB Interface
New

www.ed.co.kr _ 225
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
FLUID PROCESS CONTROL TRAINER ED-FPC
1/2
_____• Factory Automation
• Control of pressure, flow, level and temperature which are essential for process control• Capable of stand-alone control and mixed combination in various types• Real-time measurement and monitoring using data collection and signal conditioning• Measurement of flow’s status and gain of the controlled data • Built-in temperature compensation system and correction system(Feedback System)• Analog element control using the pump’s speed control proportional control valve• Built-in PID control system • Standard Controller: PC based control(WAGO)
※User can select other types of controller for customization : PLC or LabVIEW control
Touch Panel Control Screen
Automation Control Laboratory,Korea Polytec College IV(Sooncheon Campus)
PC-based Control Screen LabVIEW Control Screen
> EXPERIMENTS• Sensor output characteristics by the change of physical volume• Basic control programming essential for instrumentation control • Level control using the Analog Ultrasonic Sensor• Measurement of a storage tank’s pressure using the Analog
Pressure Sensor
• Measurement of the fluid’s flow inside a pipe using the AnalogFlow Sensor
• Measurement of the water tank’s temperature using the AnalogTemperature Sensor
• Various control techniques using the PID Temperature Regulator
New

226 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
FLUID PROCESS CONTROL TRAINER ED-FPC
2/2
_____
> SPECIFICATIONS
• Controller» Standard : PC based Control» Customization : PLC(Programmable Logic Controller) or
LabVIEW• Container(2ea)
» Acryl 10t » Dimension : 200(W) x 360(H) x 265(D)mm
• Profile Plate(1ea)• Piping Hose
» Pipe : Diameter 16» Materials : PVC
• 2/2-way Solenoid Valve(1ea)» Direct Type» Applied Voltage : DC 12~24V» Diameter : 1/2″(inside tube)
• 2/2-way Solenoid Valve(3ea)» Pilot Type» Voltage : DC 12~24V» Diameter : 1/2″(inside tube)
• Motor Pump(1ea) Diaphragm type» Voltage : 12V DC» Max. Torque : 16l/min
• Proportional Control Valve(1ea)» Applied Voltage : DC 24V» Input : DC 0~10V
• Heating Unit(1ea) Voltage » Voltage : AC 220V» Operates by SSR Output
• Pressure Tank(1ea)» Working Pressure : 10kg/cm2
» Capacity : 1l» Connection Bridge : PT½
• Pressure Switch(1ea)» Displays a pressure value and enters the analog input» Applied Voltage : DC12~24V» Output Voltage : 1~5V
• Flow Switch(1ea)» Displays a flow value and enters the analog input» Applied Voltage : DC12~24V» Flow Range : 2~16l/min
• Flow Sensor(1ea)» Voltage : DC12~24V» Working Pressure : 0~10Bar» Flow Range : 2~16l/min» Output Voltage : 1~5V
• Analog Ultrasonic Sensor(1ea)» Level sensor for measuring the level» Voltage : DC12~24V» Sensing Range : 7~20 ±1cm» Output Voltage : 1~5V
• Temperature Sensor(1ea)» Pt100Ω» Input Range : -50~400˚C» Output : 4~20mA(2wire)
• Temperature Controller(1ea)» PID Controller for controlling the Temperature Sensor
• Manual Valve(4ea)• Piping Connector(6ea)
» For connecting pipes» T type : 16ø, L type : 16ø
• Fittings(10ea)» For connecting pipes» L type : PT1/2, - type : PT1/2
• Tap(16ea)» For tapping the container
• Clamp(4ea)» For mounting valves and other parts
• Valve Bracket(5ea)» Bracket for fixing the valve
• Experimental Table(1ea)» Four processes(Pressure, Level, Flow and Temperature)
as integrated are mounted on the Experimental Plate» Dimension : 1500(W) x 700(H) x 869(D)mm» Mobile caster mounted
• Relay(6ea)» For operating the Valve, Pump and Heater» 2a-2b
• Cable Duct(1ea)» For wiring practice
ACCESSORIES
• Fitting and Pipes : 1set• Communication Cable : 1set• AC Power Cord : 1ea• User Manual : 1ea
OPTIONS
• Controller(Programmable Logic Controller or LabVIEW)• Touch Panel for PLC Controller• HMI Software for PLC or PC based Controller

www.ed.co.kr _ 227
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
GRAPHIC PANEL TRAINER ED-GP2000
1/1
_____• Factory Automation
• Graphic panel configuration by connection to Programmable Logic Controller• Combination of PLC and Graphic Panel gives good training on the automation system• Large size memory for Screen Data Storage• Built-in CF Card I/F• Standard: screen size - 10/4″, display type - TFT
(*Other Version in 12.1″and STN screen type also available at the request of customers)
> SPECIFICATIONS
GRAPHIC PANEL
• Screen Type : TFT• Screen Size : 10.4″• Color : 256 Color• Backlight : Cold Cathode Fluorescent Lamp• Resolution : 800 x 600 pixels• Luminous Intensity : 4 steps• Memory : FLASH EPROM 4MB• Touch Panel : 40 x 30 key / screen• Interface
» Serial RS232C/RS422» Extension Interface» Ethernet Interface» CF Card Interface, Sound Output, Auxiliary I/O, Printer
CASE
• Materials : Aluminum• Panel Size : 430 x 310 AL 2t• Interface
» COM1 : RS-232C/RS-422» TOOL : To PC
• Power : 220V• AUX : RUN, ALRAM, OUTCP, BUZZ, OUTCN• External Reset : AUX COM, AUX RESET
ACCESSORIES
• PLC Communication Cable : 1set• Tool Cable : 1set• Program CD : 1ea• AC Power Cord : 1ea• User Manual : 1ea

228 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
ASSEMBLINGROBOT TRAINER ED-7300
1/1
_____• Industrial Robot & System
> EXPERIMENTS• Alignment of the disassembled components• Operating principle of the ball screw and LM Guide• Understanding of the robot’s structure in detail
• Enhancement of manufacturing skills through assembly anddisassembly
> SPECIFICATIONS
ROBOT BODY
• Operation Speed : 800mm/s• Stroke : 400mm• Load : 15kgf• Repeat Accuracy : ±0.02mm• Motor : AC Servo• Motor Capacity : 100W
SHORT TEACH PENDENT
• Outside : Built-in display• Function : LED display of a current status• Communication : RS-232C communication with
Controller unit (Fixed)
SHORT CONTROLLER
• Rating Output : 100W• Power
» Voltage : Single Phase AC220V, 50/60Hz» Capacity : 0.5~1.0(kVA)
• Encoder : Incremental type(Line Driver : 9/11/15 line)• Program Tool : Teach Pendant, PC(IBM compatible), Touch
panel• Position Data Input : MDI, Direct Teaching, PC(IBM
compatible), Touch Panel• Program Capacity : 16,000step(1,000step x 16programs)• Sequence Command : 14 commands(AND, OR, NOT, TIMER,
COUNTER...)• Position Control Ratio : Within Encoder ±1 Pulse• Serial Communication I/F : RS-232C or RS-422(Option)
HARD CASE
• A carrying case protective of the equipment • Storing space for the disassembled robot components• Indicated by simple assembly and structure drawings • Color : black • Metal finish applied to the edge for stiffness reinforcement
• Disassembly and assembly practices for the robot actuators• Utilization of a robot being used in the industry, so to apply a job site after graduation • Simulation software provided to make assembly or disassembly easily• Enables basic operation and testing practices on the assembled unit using a controller

www.ed.co.kr _ 229
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
> SPECIFICATIONS
CONTROLLER
• Control Axis : 6-Axis• Operating Mode
» PTP, CP 3-dimensional linear, 3-dimensional circular• Motor Control : Digital AC Servo• Memory : 3.25MB• Language : DENSO Robot Language(Conforming to SLIM)• External I/O
» System Input : 11 / Output : 14» User Input : 16 / Output : 16
• Communication : RS-232C, Ethernet, 2 USB• Extension Slot : 3ea
TECHING PENDANT
• Display : 7.5″TFT Color LCD Monitor• Touch Panel : Design customizable by the user• Emergency Switch : 4B contact, 4circuit output• Deadman’s Switch : Three-position type(OFF-ON-OFF)• Mode Switch
» Conversion to 3 positions (AUTO, MANUAL, TEACH CHECK)• JOG Dial : Line movement and value adjustment
CONTROL UNIT
• System Lamp : DC24V ø16 6Lamps, 1Buzzer• Control Lamp : DC24V ø8 6Lamps• Call Lamp : DC24V ø 10 9Lamps• Power : ø24 Switch• System Switch : START, STOP, RESET• Manual Switch : 3 Switch• Tower Lamp : DC24V, 3 colors• System Control : Input 16, Output 16
ROBOT BODY
• Type : 6-Axis Multi Joint Robot• Load : 2kg
• Precision :±0.02mm• Range : 420mm• Max. Speed : 3,9000mm/s• Motor : AC Servo Brakes Motor• Encoder : Absolute Encoder• Weight : 15kg• User Air Port : 4ea• Robot Gripper
» Type : Pneumatic operation type» Motion Range : 12mm» Weight : 2kg
AUTOMATIC CLASSIFICATION & STORAGE SYSTEM
• Frame, Protective Cover» 1600(W) x 2000(H) x 1200(D)mm» Aluminum profile structure» Transparent acryl 10t» OPEN detecting sensor(built-in)» Auto caster for movement or fixation
• Supply Unit» Materials : 39mm» Max. load capacity : 8ea» Supply Cylinder : 75mm(sensor mounted type)
• Transfer Unit» Motor : DC24V, 1600rpm» Detection : DC 24V Optical Sensor
• Inspection Unit : Detects materials and colors• Palletizing Unit : Storing capacity : 3 x 3• Storage Cell
» Cell : 3 x 3» Detection : DC24V Sensor
ACCESSORIES
• Dummy Object : 1set • Protective Cover : 1ea• User Manual : 1ea
6-AXIS MULTI JOINTROBOT TRAINER ED-VP6
1/1
_____• Industrial Robot & System
• Experiments on the industrial robot being used in real life• Teaching pendant in 7.5″wide color touch panel• Standard language for the international industrial robot
• Simulation software in three dimension• Ethernet communication as standard, and network with PC• Interlocking experiments with the automation system
> EXPERIMENTS• Characteristics of 6-axis multi joint robot• Language for the industrial robot• Point-to-point transfer program• Palletizing experiments• Interlocking experiments with Other Automation System • Control by the 3D simulation program
New

230 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
• Experiments on the industrial SCARA robot• Teaching pendant in 7.5″wide color touch panel• Standard language for the international industrial robot
• Simulation software in three dimension• Ethernet communication as standard, and network with PC• Interlocking experiments with the automation system
> EXPERIMENTS• Characteristics of SCARA robot• Language of the industrial robot• Point-to-point transfer program• Palletizing experiments• Interlocking experiments with other automation system• Control by the 3D simulation program
> SPECIFICATIONS
CONTROLLER
• Control Axis : 4-Axis• Operating Mode
» PTP, CP 3-dimensional linear, 3-dimensional circular• Motor Control : Digital AC Servo• Memory : 3.25MB• Language : DENSO Robot Language (conforming to SLIM)• External I/O
» System Input : 11 / Output : 14» User Input : 16 / Output : 16
• Communication : RS-232C, Ethernet, 2 USB• Extension Slot : 3ea
TECHING PENDANT
• Display : 7.5″TFT Color LCD Monitor• Touch Panel : Design customizable by the user• Emergency Swtich : 4B contact, 4-circuit output• Deadman’s Switch : 3-position type(OFF-ON-OFF)• Mode Switch
» Conversion to 3 positions(AUTO, MANUAL, TEACHCHECK)
• JOG Dial : Line movement and value adjustment
CONTROL UNIT
• System Lamp : DC24V ø16 6Lamps, 1Buzzer• Control Lamp : DC24V ø8 6Lamps• Call Lamp : DC24V ø 10 2Lamps• Power : ø24 Switch• System Switch : START, STOP, RESET• Manual Switch : 3 Switch• Tower Lamp : DC24V, 3colors• System Control : Input 16, Output 16
ROBOT BODY
• Type : 4-Axis SCARA Robot
• Load : 5kg• Precision : ±0.02mm• Range : 450mm• Max. Speed : 6,300mm/s• Motor : AC Servo Brakes Motor• Encoder : Absolute Encoder• Weight : 25kg• User Air Port : 6ea• Robot Gripper
» Type : Pneumatic operation type» Motion Range : 12mm» Weight : 2kg
AUTOMATIC CLASSIFICATION & STORAGE SYSTEM• Frame, Protective Cover
» 1600(W) x 2000(H) x 1200(D)mm» Aluminum profile structure» Transparent acryl 10t» OPEN detecting sensor(built-in)» Auto caster for movement or fixation
• Supply Unit» Materials : 39mm» Max. Load Capacity : 8ea» Cylinder : 75mm(sensor mounted type)
• Transfer Unit» Motor : DC24V, 1600rpm» Detection : DC 24V Optical Sensor
• Inspection Unit : Detects materials and colors• Palletizing Unit : Storing capacity : 3 x 3• Storage Cell
» Partition : 4» Detection : DC24V Sensor
ACCESSORIES
• Dummy Object : 1set • Protective Cover : 1ea• User Manual : 1ea
4-AXIS SCARA ROBOT TRAINER ED-HS4
1/1
_____• Industrial Robot & System
New

www.ed.co.kr _ 231
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• Experiments on the 4-axis Cartesian robot• Teaching pendant in 7.5″wide color touch panel• Standard language for the international industrial robot
• Simulation software in three dimension• Ethernet communication as standard, and network with PC• Interlocking experiments with the automation system
> EXPERIMENTS• Characteristics of the Rectangular Coordinates robot• Language of the Industrial robot• Point-to-point transfer program• Palletizing experiments• Interlocking experiments with other automation system• Control by the 3D simulation program
> SPECIFICATIONS
CONTROLLER
• Control Axis : 4-Axis• Operating Mode
» PTP, CP 3-dimensional linear, 3-dimensional circular• Motor Control : Digital AC Servo• Memory : 3.25MB• Language : Denso Robot Language (conforming to SLIM)• External I/O
» System Input : 11 / Output : 14» User Input : 16 / Output : 16
• Communication : RS-232C, Ethernet, 2 USB• Extension Slot : 3ea
TECHING PENDANT
• Display : 7.5″TFT Color LCD Monitor• Touch Panel : Design customizable by the user• Emergency Swtich : 4B contact, 4-circuit output• Deadman’s Switch : 3-position type(OFF-ON-OFF)• Mode Switch
» Conversion to 3 positions (AUTO, MANUAL, TEACHCHECK)• JOG Dial : Line movement and value adjustment
CONTROL UNIT
• System Lamp : DC24V ø16 6Lamps, 1Buzzer• Control Lamp : DC24V ø8 6Lamps• Call Lamp : DC24V ø 10 2Lamps• Power : ø24 Switch• System Switch : START, STOP, RESET• Manual Switch : 3 Switch• Tower Lamp : DC24V, 3colors• System Control : Input 16, Output 16
ROBOT BODY
• Type : 4-Axis Rectangular coordinates Robot• Load : 5kg
• Precision : 0.025mm• Range : 450(X) x 400(Y) x 200(Z)mm W ±270• Max. Speed : 1,000mm/s• Motor : AC Servo Brakes Motor• Encoder : Absolute Encoder• Weight : 66kg• User Air Port : -• Robot Gripper
» Type : Pneumatic operation type» Motion Range : 12mm» Wight : 2kg
AUTOMATIC CLASSIFICATION & STORAGE SYSTEM• Frame, Protective Cover
» 1600(W) x 2000(H) x 1200(D)mm» Aluminum profile structure» Transparent acryl 10t» OPEN detecting sensor (built-in)» Auto caster for movement or fixation
• Supply Unit» Materials : 39mm» Max. Load Capacity : 8ea» Cylinder : 75mm (sensor mounted type)
• Transfer Unit» Motor : DC24V, 1600rpm» Detection : DC 24V Optical Sensor DC24V
• Inspection Unit : Detects materials and colors• Palletizing Unit : Storing capacity : 3 x 3• Storage Cell
» Partition : 4» Detection : DC24V Sensor
ACCESSORIES
• Dummy Object : 1set • Protective Cover : 1ea• User Manual : 1ea
4-AXIS RECTANGULARCOORDINATES ROBOTTRAINER ED-XYZ
1/1
_____• Industrial Robot & System
New

232 _ ED Co.,Ltd.
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N
DESKTOP ROBOT TRAINER ED-DTR
1/1
_____• Industrial Robot & System
New
> SPECIFICATIONS
CONTROLLER
• Control Axis : 4-Axis• Operating Mode
» PTP, CP 3-dimensional linear• Motor Control : AC Servo• Memory : 100 Files, 1000 Points• Language : Industrial Robot Language(conforming to SLIM)• External I/O
» System Input : 8 / Output : 16» User Input : 24 / Output : 32
• Communication : RS-232C, RS422/RS485• Backup : FRAM
ROBOT BODY
• Type : Desktop Robot• Load : 10kg
• Precision : ±0.02mm• Range : 300(X) x 300(Y) x 100(Z)mm• Max. Speed : 500mm/s• Motor : AC Servo Motor or Stepping Motor• Encoder : Absolute Encoder• Weight : 62kg• Power : AC220V
ACCESSORIES
• Dummy Object : 1set• Protective Cover : 1ea• Operation Software CD : 1ea• User Manual : 1ea• Ac power cord : 1ea
• All-in-one system integrated with Controller • Principles of the industrial robot control through various operations• Standard language for the international industrial robot• Software exclusive for the robot control • Interlocking experiments with the automation system
> EXPERIMENTS• Principles of the rectangular coordinates robot• Language for the industrial robot• Point-to-point transfer program
• Palletizing experiments• Interlocking experiments with other automation system
ARM ROBOT TRAINER ED-7220C
1/1
_____
www.ed.co.kr _ 233
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
• Industrial Robot & System
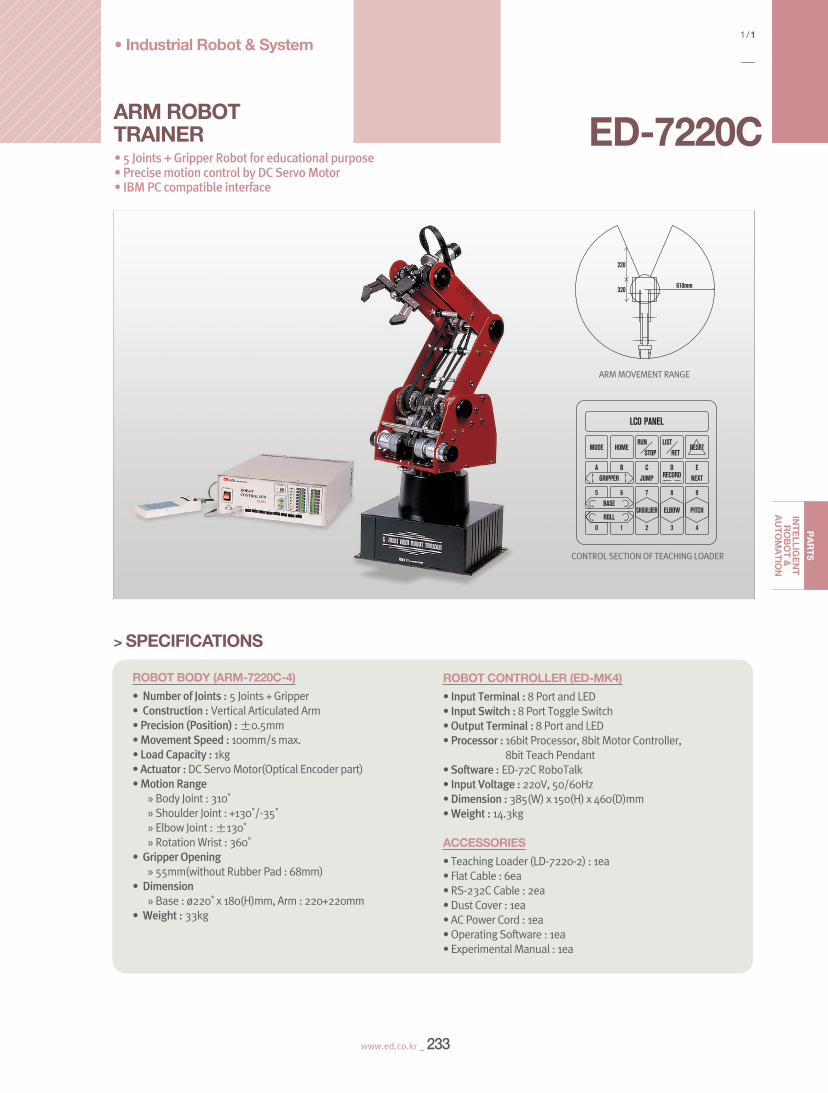
• 5 Joints + Gripper Robot for educational purpose• Precise motion control by DC Servo Motor• IBM PC compatible interface
> SPECIFICATIONS
ROBOT BODY (ARM-7220C-4)
• Number of Joints : 5 Joints + Gripper• Construction : Vertical Articulated Arm• Precision (Position) : ±0.5mm• Movement Speed : 100mm/s max.• Load Capacity : 1kg• Actuator : DC Servo Motor(Optical Encoder part)• Motion Range
» Body Joint : 310˚» Shoulder Joint : +130˚/-35˚» Elbow Joint : ±130˚» Rotation Wrist : 360˚
• Gripper Opening » 55mm(without Rubber Pad : 68mm)
• Dimension» Base : ø220˚ x 180(H)mm, Arm : 220+220mm
• Weight : 33kg
ROBOT CONTROLLER (ED-MK4)
• Input Terminal : 8 Port and LED• Input Switch : 8 Port Toggle Switch• Output Terminal : 8 Port and LED• Processor : 16bit Processor, 8bit Motor Controller,
8bit Teach Pendant• Software : ED-72C RoboTalk• Input Voltage : 220V, 50/60Hz• Dimension : 385(W) x 150(H) x 460(D)mm• Weight : 14.3kg
ACCESSORIES
• Teaching Loader (LD-7220-2) : 1ea• Flat Cable : 6ea• RS-232C Cable : 2ea• Dust Cover : 1ea• AC Power Cord : 1ea • Operating Software : 1ea• Experimental Manual : 1ea
ARM MOVEMENT RANGE
CONTROL SECTION OF TEACHING LOADER

REFRIGERATION & AIR CONDITIONINGDEMONSTRATOR
ED-5820ED-5840
1/2
_____
234 _ ED Co.,Ltd.
• Industrial Robot & System
• Easy-to-use demonstarator for principles of refrigeration/airconditioning• Motor Compressor : Pison type• Trouble shooting for pipe leakage
ED-5820
ED-5840
> EXPERIMENTS
ED-5820(Refrigerator)• Principle of refrigeration• Refrigeration cycle & Morier diagram • Understanding of refrigeration system• Refrigerator Operation• Refrigerant flow and Its state change• Pipe leakage and refrigerant charge• Trouble shooting
ED-5840(Air Conditioner)• Principle of air conditioner• Refrigerant cycle & Morier diagram• Understanding of air conditioning system• Air Conditioner operation• Refrigerant flow and its state change• Pipe leakage and refrigerant charge• Trouble shooting
PA
RT5
INTE
LLIG
EN
TR
OB
OT
&A
UTO
MA
TIO
N

STRAINER/DRIER
EXPENSION VALVE
EVAPORATOR
PRESSURE GAUGE
LIGUID RECEIVER
FRESSURE SWITCH(1)
FRESSURE SWITCH(2)
1.2l(80% apply)
High : 8~30kg/cm2, Low : -0.5~2kg/cm2
Diff. : 50mmHg~6kg/cm2
-
-
High : 8 ~ 30 kg/cm2, Low : -0.5~6kg/cm2
Diff. : 1mmHg~4kg/cm2
Range : 5~30kg/cm2
Diff. : 1.5~10kg/cm2
3/8 inch
Thermostatic Expansion Valve: TEV
380 kcal/h
High : 0~35kg/cm2, Low : 0~15kg/cm2
REFRIGERATION & AIR CONDITIONINGDEMONSTRATOR
ED-5820ED-5840
2/2
_____
www.ed.co.kr _ 235
PA
RT5
INTE
LLIGE
NT
RO
BO
T &A
UTO
MA
TION
GENERAL CHARACTERISTICS
• POWER / FREQUENCY : AC 220V , 60Hz , single phase• TEMP. CONTROL : -50˚C~50˚C• DEMENSION : 1180(W) x 785(H) x 520(D)mm
ACCESSORIES
• Digital Temperature Meter : 1ea• Operation Manual : 1ea
OPTIONS
• Service Manifold(with Gauge) : 1set• Refrigerant Cylinder : 1ea
> SPECIFICATIONS
REFRIGERANT TYPE
COMPRESSOR
CONDENSOR
SIGHT GLASS
Classification ED-5820
1/3 HP
1,660 kcal/h
PB35bar/8o˚C
Freon 22(R-22)
ED-5840


















